Область техники, к которой относится изобретение
Настоящее изобретение относится к способам и устройствам управления выращиванием растений в условиях контролируемой среды, а более конкретно – к интеллектуальному управлению выращиванием, в том числе основанному на современных технологиях и удаленных средств связи, например Интернета.
Предыдущий уровень техники
Интеллектуальное управление выращиванием растений стало актуальной темой в области сельского хозяйства, для которой люди сделали много технологических усовершенствований и приложили много усилий.
Наиболее распространенное интеллектуальное выращивание представляет собой, в частности, автоматическую систему полива, обслуживающую независимых пользователей в условиях естественного освещения. Величина расхода воды полива и временной интервал основаны на приблизительной оценке.
В публикации патентной заявки Китая CN 102550371А представлена автоматическая система и способ управления орошением для производственного модуля или усадьбы с использованием возможностей Интернета вещей, которая состоит из системы управления, регионального узла, датчика температуры и влажности почвы и терминала для орошения дождеванием. В этой технологии отслеживают два индикатора: температуры и влажности, и решение о поливе принимается согласно двум индикаторам, т.е. температуры и влажности. Однако величина полива в этом способе основана на заданном пороговом значении или ручном управлении, независимо от видов растений и цикла роста растений. Для окружающей среды рассматриваются только влажность и температура почвы.
В публикации патентной заявки Китая CN 102868749A представлены система облачных сервисов Интернета вещей (IoT) и способ сервисных процессов для земледелия и животноводства. При этом собирают данные о выращивании, затем их посылают в облачный центр и в итоге – в пользовательский терминал. Облачные сервисы включают: сельскохозяйственную информацию, принципы деятельности и нормативные документы, передачу информации, информационный консалтинг, экспертные системы, технические сервисы, сбор данных, мониторинг производства, мониторинг окружающей среды и модуль терминального управления. В технологии существуют следующие проблемы: в ее главных сервисах сбора данных и передачи и получения информации отсутствует управление самим выращиванием с обратной связью; информация проходит в одном направлении, т.е. данные о выращивании собирают и посылают в пользовательский терминал. Это означает, что в системе отсутствуют возможности активного интеллектуального регулирования; система обмена данными не учитывает виды растений, жизненный цикл растений и другую информацию.
Наиболее близким к заявляемому техническому решению является способ и устройство интеллектуального выращивания, патент РФ № 2688234 на изобретение «Способ интеллектуального управления выращиванием и интеллектуальное устройство для выращивания». Способ предусматривает стадию сбора данных, стадию классификации-маркировки и стадию регулирования, причем стадия сбора данных предусматривает:
• сбор информации о выращивании растений и информации об окружающей среде, где расположены устройства для выращивания, и отправку информации в систему обработки данных;
• сбор информации с заданными временными интервалами по меньшей мере об одном условии выращивания из множества условий выращивания и отправку информации об условиях выращивания в систему обработки данных; и
• сбор вегетационно-средовых характеристик растений и отправку вегетационно-средовых характеристик в систему обработки данных;
стадия классификации-маркировки предусматривает:
• в системе обработки данных классификацию на основании информации о выращивании и информации об окружающей среде, оценку в баллах на основании вегетационно-средовых характеристик в устройствах для выращивания и сравнение баллов вегетационно-средовых характеристик множества устройств для выращивания согласно заданным условиям в одной и той же категории, маркировку каждой информации об условиях выращивания устройства для выращивания с высоким баллом вегетационно-средовых характеристик и сохранение маркированной информации об условиях выращивания по каждой категории, относящейся к циклу роста растений;
стадия регулирования предусматривает:
• сравнение текущей информации об условиях выращивания с сохраненной маркированной информацией об условиях выращивания, основанной на информации о выращивании и информации об окружающей среде соответствующего устройства для выращивания, и когда разница между первой и последней превышает пороговое значение, генерирование регулирующих данных на основании сохраненной маркированной информации об условиях выращивания и текущей информации об условиях выращивания; и отправку регулирующих данных в соответствующее устройство для выращивания для выполнения операции регулирования условий выращивания соответствующего устройства для выращивания.
Однако данные способ и устройство для его реализации не позволяют осуществлять управление процессом роста в режиме реального времени в автоматическом или непосредственном режиме с учетом информации о текущих или установленных условиях выращивания растений, что в случае возникновения нестандартных ситуаций не позволяет обеспечить надежность и бесперебойность управления выращиванием растений, а также определять наилучший режим выращивания растений исходя из сведений об условиях выращивания.
Используемые понятия и определения
РС1 – управляющий процессор: устройство управления и сбора данных. Собирает текущие данные от датчиков Д, накапливает их в определенный период времени, передает в удаленные устройства РС2 (в облачном режиме) или PC3 (в локальном режиме). РС1 принимает номинальные значения параметров (циклограммы) от РС2 в облачном режиме или от РС3 в локальном режиме, передает корректирующие команды на исполнительные устройства И.
РС1 может поддерживать жизнеобеспечение системы даже в отсутствие связи с РС1 и РС3 какой-то период времени.
Работа РС1 обеспечивается следующими программными средствами:
1. «Программное обеспечение устройства Grolli Air», свидетельство № 2022680076, дата регистрации: 27.10.2022.
Программное обеспечение интеллектуальной метеостанции Grolli Air на основе микроконтроллера ESP32 предназначено для передачи в облачную платформу «Виртуальный агроном» информации о параметрах окружающей среды и управления исполнительными устройствами на основе указаний, поступающих от облачной платформы. ПО фиксирует текущие показания датчиков температуры, влажности и концентрации углекислого газа, выполняет их предварительную обработку и передаёт в облачную платформу по протоколу MQTT через беспроводной сетевой интерфейс. Управляет исполнительными устройствами, в частности: тремя исполнительными реле, двумя широтно-импульсными модуляторами согласно полученному из облака расписанию или на основе показаний датчиков. Язык программирования: С++. Размер исходного кода: 206 килобайт.
2. «Программное обеспечение устройства Grolli Aqua», свидетельство № 2022667738, дата регистрации: 23.09.2022.
Программное обеспечение растворного узла Grolli Aqua на основе микрокомпьютера Raspberry Pi 4B предназначено для взаимодействия с исполнительными устройствами, в частности устройствами растворного узла (насосами, клапанами, датчиками), для обеспечения заданных условий выращивания сельскохозяйственных культур. ПО управляет работой и спектром светильников в соответствии с расписанием, подготовкой и подачей питательного раствора с заданными параметрами. Получает параметры выращивания из облачной платформы «Виртуальный агроном» и передает информацию о текущем режиме работы, показаниях датчиков и возникающих проблемах, а также данные для видеоаналитики в облачную платформу и на мобильное приложение. Для управления исполнительными устройствами применяется микроконтроллер на платформе ATMega, который взаимодействует с микрокомпьютером Raspberri Pi по последовательному интерфейсу. Языки программирования: С# (микрокомпьютер Raspberry Pi) и С (микроконтроллер ATmega). Размер исходного кода: 1380 килобайт.
РС2 – облачный сервер: удаленное устройство регулирования и хранения информации. Содержит базу данных (БД) по номинальным значениям показателей для датчиков контроля Д исходя из вида сельскохозяйственной культуры, условий ее выращивания, пополняет ее текущей обработанной информацией об условиях выращивания сельскохозяйственных культур. Принимает текущие данные от РС1, сопоставляет их с номинальными данными, в случае необходимости вырабатывает корректирующие команды и передает их на РС1, собирает, обрабатывает и хранит информацию в БД. В случае выхода текущих данных за пороговые значения подает сигнал на РС3 и/или на мобильное устройство пользователя (оператора), и/или на электронную почту, и/или на иное приемное устройство. РС2 содержит БД по многим культурам и по разным фазам и условиям их выращивания. Имеются подвиды фаз выращивания: лечение, ускорения режима выращивания др.
Работа облачного сервера РС2 обеспечивается программными средствами облачной платформы «Виртуальный агроном», свидетельство № 2022668227, дата регистрации: 04.10.2022.
Облачная платформа «Виртуальный агроном» представляет собой масштабируемое серверное программное обеспечение, работающее в облаках Yandex Cloud. Предназначено для управления базой данных цифровых двойников вертикальных ферм и входящих в их состав устройств. Обеспечивает сбор информации от датчиков контроля о состоянии устройств и обновление цифровых двойников. Предоставляет программный интерфейс для управления конфигурациями ферм и параметрами выращивания авторизованными пользователями и надёжную передачу этой информации исполняющим устройствам. Отслеживает режимы работы и телеметрию устройств и формирует записи о нештатных ситуациях и плановых задачах в БД цифровых двойников. Написано на языках программирования C# (серверная составляющая) и JavaScript (страницы для отображения телеметрии и состояния устройств). Размер исходного кода: 919 килобайт.
РС3 – терминал дистанционного управления или устройство дистанционного управления. Получает и демонстрирует текущие данные от РС1. Считывает и распознаёт машинно-считываемые метки, такие как QR- или штрих-коды. В случае невозможности работы РС2 по любой из причин используется для управления пользователем (оператором) РС1 в локальном режиме.
Работа терминала дистанционного управления РС3 обеспечивается программными средствами мобильного приложения Grolli One, свидетельство № 2022668229, дата регистрации: 04.10.2022.
Мобильное приложение Grolli One для устройств под управлением ОС Android и iOS предназначено для управления вертикальными фермами, подключенными к облачной платформе «Виртуальный агроном». Мобильное приложение выполняет авторизацию пользователя, отображает список доступных пользователю вертикальных ферм, полную информацию об устройствах, входящих в состав ферм, информацию о текущем состоянии, возникших проблемах и требуемых действиях на ферме. Позволяет пользователю создавать и удалять фермы, добавлять и удалять устройства на фермах, просматривать и изменять параметры выращивания (характеристики питательного раствора, световую и климатическую обстановку), просматривать изображения с установленных на ферме камер, устанавливать право доступа к фермам другим пользователям. Написано на языках программирования C# и XAML с применением технологии Xamarin. Размер исходного кода: 5403 килобайта.
Пользователь (Оператор) – лицо, осуществляющее контроль и управление системой.
Историческая информация/данные – информация, собранная за предыдущие периоды времени.
Объекты среды выращивания – семена выращиваемых культур; удобрения, пестициды, фунгициды, помещенные в соответствующие емкости; элементы инженерных систем, включающие поддоны с растениями, сменные фильтры и т.п., которые или упаковки которых снабжены машинно-считываемыми метками.
Д – сенсорные устройства, датчики – конструктивно обособленные устройства, содержащие один или несколько первичных измерительных преобразователей, не только выполняющие пассивную роль мониторинга, но и замеряющие характеристики исследуемых факторов в диапазонах, допускающихся их техническими возможностями и требуемыми показателями работы системы выращивания растений методом гидропоники. Например, датчики снятия показателей (контроля) влажности, температуры, кислотности, освещенности, насыщения углекислым газом и др.
И – исполнительные устройства. Конструктивно-обособленные устройства, оказывающие влияние на окружающую среду, в которой выращиваются растения. Включают источники освещения с управляемой яркостью и спектром, средства управления температурой, влажностью, уровнем содержания углекислого газа, насосы и клапаны установки для приготовления и подачи питательного раствора.
Номинальные показатели/значения – значения параметров, при которых обеспечиваются оптимальные условия выращивания растений. Входят в суточную циклограмму выращивания и хранятся в энергонезависимой памяти PC1.
ПО – программное обеспечение.
Технической задачей заявленной группы изобретений является повышение качества управления процессом роста с учетом исторической информации и информации из баз данных о текущих или установленных условиях выращивания растений включая:
- повышение точности управления исполнительными механизмами;
- повышение эффективности использования ресурсов путем получения и анализа исторических данных об условиях и росте выращиваемых растений за определенные периоды времени;
- минимизация расходов на выращивание растений благодаря получению и анализу данных о процессе выращивания растений в конкретных условиях;
- устранение зависимости от удаленных облачных систем управления в локальном режиме;
- обеспечение системности выращивания растений на основе имеющихся и накапливаемых данных о процессе роста в зависимости от текущих условий;
- получение данных о росте растений в определенных режимах с целью формирования данных о развитии растений и определения оптимальных условий их выращивания в зависимости от внешних условий при выполнении научно-исследовательских работ.
Все эти технические результаты в совокупности позволяют повысить качество управления процессом роста в режиме реального времени в автоматическом или непосредственно управляемом режиме с учетом исторической информации и информации из баз данных о текущих или установленных условиях выращивания растений.
Раскрытие сущности изобретения
Способ управления выращиванием растений в условиях контролируемой среды включает сбор, обработку и фиксацию показателей, снимаемых датчиками Д, о текущем состоянии контролируемых показателей среды, сопоставление контролируемых показателей с номинальными, определение на основании полученных данных необходимых корректив и передачу их на исполнительные устройства. Управление выращиванием растений в условиях контролируемой среды осуществляют в двух взаимодополняющих или заменяющих режимах: облачном и локальном, для чего осуществляют: сбор, накопление, фиксацию и передачу устройством управления и сбора данных РС1 с установленной частотой полученных от датчиков Д текущих показателей в облачном режиме на устройство регулирования и хранения информации РС2 и в локальном режиме – на устройство дистанционного управления РС3. При этом устройство РС2 накапливает полученную информацию. Далее сопоставляют текущие показатели датчиков Д в устройстве РС1 с установленными номинальными значениями, содержащимися в энергонезависимой памяти устройства РС1, отображают текущие показатели от датчиков Д на устройстве РС3. В случае, если текущие показатели выходят за установленные допустимые границы (пороговые значения) в установленных пределах, устройство РС1 определяет требуемые коррективы и передает их (соответствующую команду) на исполнительные устройства И. В случае если текущие показатели от датчиков Д за определенный период времени критически выходят за установленные допустимые границы (пороговые значения), для информации пользователя (оператора) PC1 в облачном режиме подается уведомление на устройство РС2, которое передаёт уведомление на PC3, и/или электронную почту, и/или иное средство коммуникации в облачном режиме, или на PC3 в локальном режиме, а PC3 подаёт Пользователю звуковой или световой сигнал.
В случае отсутствия, или прерывания, или отказа от связи между устройством РС1 с устройством РС2 в облачном режиме работа системы может контролироваться с помощью устройства РС3 в локальном режиме исходя из текущих показателей датчиков Д, полученных от устройства РС1. В случае отсутствия, или прерывания, или отказа от связи между устройством PC1 и устройством PC3 в локальном режиме работа системы продолжается на основе номинальных показателей, содержащихся в энергонезависимой памяти PC1.
Полученные устройством РС1 текущие показатели датчиков Д сохраняются в энергонезависимой памяти устройства РС1. Энергонезависимая память устройства РС1 содержит номинальные значения параметров (циклограмму) для управления исполнительными устройствами И. Передача устройством РС1 текущих показателей от датчиков Д на устройство РС2 осуществляется пакетами данных за определенный период времени. Полученные от устройства РС1 устройством РС2 текущие показатели от датчиков Д обрабатываются, анализируются с помощью соответствующей программы для ЭВМ и сохраняются в базе данных устройства РС2.
Передаваемые от устройства РС1 исполнительным устройствам И команды корректируются РС1 с учетом накопленной информации о соотношении «воздействие/результат» и записываются в энергонезависимой памяти устройства PC1. Например, при подготовке питательного раствора PC1 запоминает реакцию системы на вливание фиксированного объема кислоты и в дальнейшем использует эту информацию для уменьшения времени подготовки раствора.
Определение необходимых корректив, передаваемых на исполнительные устройства, устройство PC1 осуществляет на основе совокупности показаний датчиков Д, данных обратной связи от исполнительных устройств И и номинальных значений параметров (циклограммы), полученных от PC2 в облачном режиме или PC3 – в локальном режиме и содержащихся в энергонезависимой памяти РС1.
Информация о состоянии и/или наличии объектов среды выращивания считывается РС3 с машиносчитываемой метки (QR-кода, штрих-кода).
Воздействие на объекты среды выращивания осуществляют на основе информации, содержащейся на машинно-считываемой метке, считывание которой осуществляют устройством PC3, при этом полученная информация передается на РС2, где информация сопоставляется с имеющимися данными, на основании чего формируются и корректировки номинальных значений (циклограммы) на РС1, и информация на РС3.
В случае выявления метки, не соответствующей выполняемому шагу/действию, происходит звуковая или визуальная индикация с демонстрацией инструкции о выполнении правильного действия. В случае выявления метки, соответствующей выполняемому шагу/действию, PC3 сообщает PC2 об успешном выполнении действия. PC2 использует эту информацию для формирования корректирующих команд для PC1.
Для реализации заявленного способа заявлена система управления выращиванием растений в условиях контролируемой среды, содержащая устройство управления и сбора данных РС1, связанное с удаленным устройством регулирования и хранения информации РС2, которая содержит датчики мониторинга рабочих параметров системы Д и исполнительные устройства системы И; кроме того, система для выращивания растений дополнительно содержит устройство дистанционного управления РС3, связанное или включающее терминал пользователя, которое дистанционно связано с устройством РС1 в локальном режиме и устройством РС2 – в облачном режиме.
Устройство РС1 содержит энергонезависимую память, в которой хранятся номинальные значения параметров для текущего процесса выращивания, и выполнено с возможностью принятия, обработки, накопления и хранения информации от одного или более датчиков Д, осуществляющих мониторинг различных параметров системы, в частности таких, как температура, состав воздуха, интенсивность света, влажность и состав питательного раствора. Устройство РС1 выполнено с возможностью получения и передачи управляющих команд на исполнительные устройства И, осуществляющие, в частности, подачу питания, воды, света, углекислого газа.
Устройство РС2 выполнено в форме удаленного сервера, содержащего базу данных номинальных режимов выращивания разных сельскохозяйственных культур, в частности в зависимости от условий выращивания и/или фазы развития растений, включая также температуру, влажность, концентрацию углекислого газа, интенсивность света, проводимость питательного раствора и значение pH, и выполнено с возможностью сопоставления полученной информации с номинальными режимами, на основании чего направляются корректирующие данные на устройство РС1 с возможностью направления уведомления на устройство РС3, и/или электронную почту, и/ или иное приемное устройство в случае выхода полученной от РС1 сопоставленной информации за границы номинальных значений. Устройство РС3 выполнено с возможностью получения, представления в локальном режиме от устройства РС1 или в облачном режиме – от РС2 информации о рабочих параметрах системы, в частности таких, как температура, состав воздуха, интенсивность света, влажность и частота дозирования питательных веществ; получения уведомления от устройства РС2 о степени соответствия полученной от РС1 информации номинальным значениям, содержащимся в базе данных РС2; управления в локальном режиме процессом выращивания путем направления соответствующих номинальных значений параметров (циклограммы) на устройство РС1 при отказе от использования устройства РС2; демонстрации пользователю пошаговой инструкции по взаимодействию с объектами среды выращивания; считывания и распознавания специальных визуальных машинно-считываемых меток (QR-код, штрих-код) и передачи информации на РС2, при этом удаленное устройство РС2 связано с устройством РС1 и с устройством РС3 через модуль связи (дистанционно). Информация о состоянии и/или наличии объектов среды выращивания считывается РC3 с машинно-считываемой метки (QR-кода, штрих-кода).
Воздействие на объекты контролируемой среды выращивания осуществляют на основе информации, содержащейся на машинно-считываемой метке, считывание которой осуществляют устройством PC3, при этом полученная информация передается на РС2, где информация сопоставляется с имеющимися данными, на основании чего формируются и подаются команды на РС1 и информация – на РС3.
В случае выявления неверной метки, не соответствующей выполняемому шагу/действию, происходит звуковая или визуальная индикация с демонстрацией инструкции о выполнении правильного действия. В случае верной метки PC3 сообщает PC2 об успешном выполнении действия. PC2 использует эту информацию для формирования корректирующих команд для PC1.
Принципиальной особенностью системы является то, что при необходимости выполнения действий, которые физически не могут выполнить исполнительные устройства И, например при смене канистры с концентратом питательного раствора, команды по взаимодействию с объектами среды выращивания в форме пошаговой инструкции передаются человеку через PC3, а обратная связь с контролем правильности выполнения осуществляется путём сканирования визуальных меток (QR-кодов) на объектах, с которыми работает человек.
Особенностью РС3 является то, что он выполнен с возможностью сканирования машинносчитываемых меток с объектов среды выращивания, передачи информации на РС2, где информация сопоставляется с имеющимися данными, на основании чего подаются команды на РС1 и РС3.
Заявленные изобретения поясняются фигурами графических изображений.
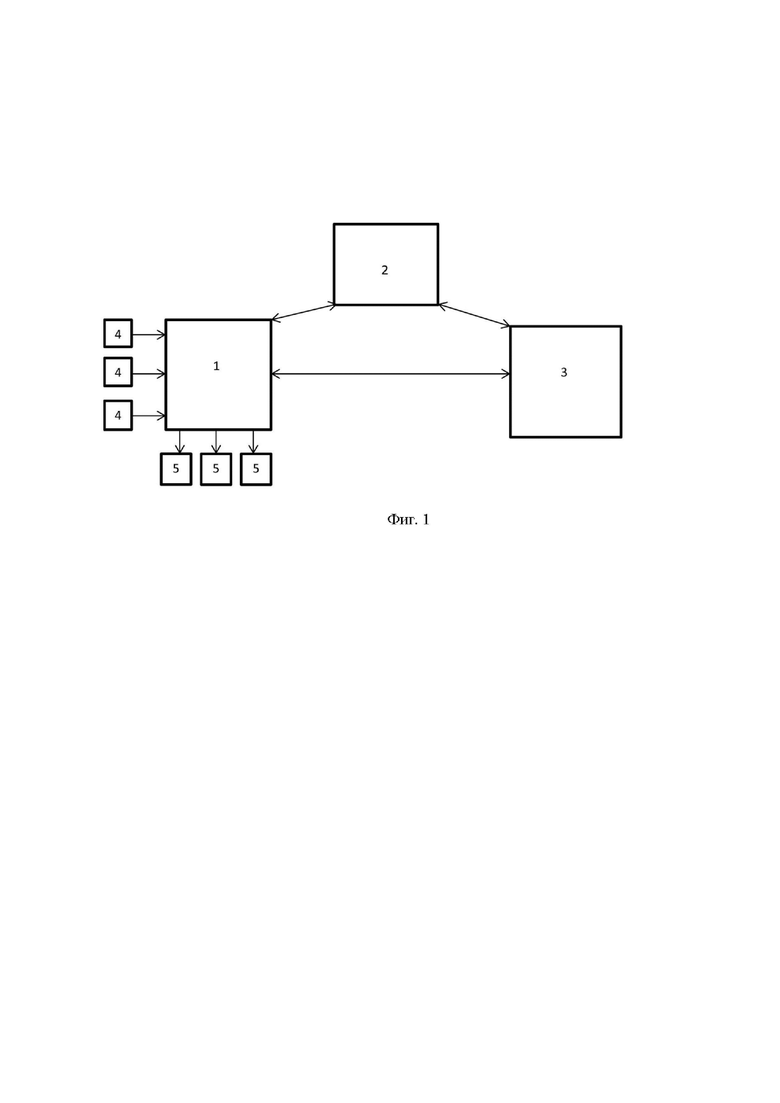
На фиг. 1 представлена блок-схема системы управления выращиванием растений в условиях контролируемой среды.
На фиг. 2 представлен скриншот экрана мобильного приложения с сообщением оператору о возникшей проблеме.
На фиг. 3 представлен скриншот экрана мобильного приложения с откорректированными параметрами выращивания.
Где:
1 – РС1, управляющий процессор;
2 – РС2, облачный сервер – удаленное устройство регулирования и хранения информации;
3 – РС3, терминал дистанционного управления или устройство дистанционного управления;
4 – датчики контроля Д;
5 – исполнительные устройства И.
Способ и система функционируют следующим образом.
На основании команды от пользователя, передаваемой черед РС3, РС1 начинает работу, в частности включает в работу Иn в соответствии с выбранным режимом.
РС3 – мобильное устройство с функциями:
• приема данных (информации);
• набора и/или передачи управляющих команд от пользователя.
Система работает в двух режимах:
• облачный режим управления выращиванием растений;
• локальный режим управления выращиванием растений.
Управление в облачном режиме.
Облачный режим управления выращиванием растений осуществляется следующим образом.
Через приложение, работающее на мобильном устройстве РС3, на облачный сервер РС2 дается первоначальная команда, например «выращиваем салат Берлинский».
РС2 в соответствии с командой, полученной от РС3, передаёт номинальные значения параметров (циклограмму) на РС1 в соответствии с данными о выращивании указанной сельскохозяйственной культуры из БД – справочника, хранящегося на PC2.
Датчики Д (4) снимают/фиксируют с установленной частотой показатели текущего состояния системы выращивания растений. Это физические и химические параметры, обеспечивающие оптимальные условия выращивания данного вида растений в определенный период времени.
РС1 собирает с датчиков Д (4) информацию, обрабатывает и накапливает в своей энергонезависимой памяти до момента передачи соответствующего блока информации через установленный период времени в РС2.
Информация о показателях (физических и химических параметрах, обеспечивающих оптимальные условия выращивания данного вида растений в определенный период времени) в установленном пользователем объеме отображается на экране РC3 (мобильного телефона, персонального компьютера, планшета) в режиме реального времени.
Показатели физических и химических параметров, обеспечивающих оптимальные условия выращивания данного вида растений в определенный период времени, в форме полученных сигналов обрабатываются в РС1 и приводятся к стандартному формату номинальных значений параметров.
РC2 собирает полученную информацию, обрабатывает и формирует отчеты о работе системы в указанный период времени.
Полученные от датчиков Д (4) данные сохраняются в РС1.
Полученные от датчиков Д (4) данные направляются от РС1 в удаленный блок 2 обработки и хранения информации – РС2.
Полученные от датчиков Д (4) данные сопоставляются PC1 с помощью соответствующей программы для ЭВМ с заданными/тестовыми/идеальными параметрами показателей условий выращивания данного вида растений.
В результате сопоставления полученных данных и содержащихся в энергонезависимой памяти РС1 номинальных значений параметров показателей условий выращивания данного вида растений производится определение требуемых корректив фактических условий выращивания для приведения их в соответствие с заданными/тестовыми/идеальными характеристиками показателей условий выращивания данного вида растений.
Соответствующие команды о производстве необходимых корректив передаются от РС1 на исполнительные устройства И (5) для корректировки контролируемых параметров: температуры, влажности, питания, освещения и других физических и химических требуемых/установленных параметров.
Исполнительные устройства выполняют полученные команды и вносят требуемые коррективы в работу приборов и устройств обеспечения выращивания растений, изменяя контролируемые параметры: температуру, влажность, питание, освещение и другие физические и химические требуемые/установленные параметры.
РС3 отображает полученную информацию. В качестве РС3 может быть использовано мобильное устройство с установленным приложением «Grolli One», которое позволяет пользователям удаленно управлять всеми подключенными к нему устройствами PC1 и контролировать их работу.
Облачная система РС2 управляет такими параметрами, как свет (спектр, фитопериод, уровень облученности), температура, влажность, концентрация СО2, состав питательного раствора и график кормления, при помощи РС1. PC2 передаёт на PC1 информацию о параметрах выращивания, а РС1 передает соответствующие команды на исполнительные устройства. Таким образом, изменения параметров окружающей среды выполняет PC1 при помощи исполнительных устройств.
Если показатели физических и химических параметров, обеспечивающих оптимальные условия выращивания данного вида растений в определенный период времени, превышают установленные допустимые границы, пользователям подается звуковой или световой сигнал.
Данные действия осуществляются через установленные временные интервалы.
Содержащиеся в РС1 данные являются подмножеством данных на РС2 и полностью определяют текущий процесс выращивания. Это условие обеспечивается соответствующей программой для ЭВМ (алгоритмом синхронизации).
При отсутствии связи с РС2 в облачном режиме или с PC3 – в локальном режиме система выращивания полностью управляется согласно значениям, содержащимся в энергонезависимой памяти РС1.
В случае необходимости, в частности при отсутствии связи с внешним РС2, пользователь имеет возможность, используя устройство управления PC3 (мобильный телефон, терминал, персональный компьютер, планшет), осуществлять управление в локальном режиме системой выращивания растений при помощи PC1.
Существуют три вида состояния функционирования системы:
• оптимальный,
• приемлемый,
• критичный.
Оптимальный – режимы работы: Иn соответствуют требуемым и находятся в установленных пределах рабочих значений.
Приемлемый – аварийный режим выхода за рабочие значения, но допустимый в течение определенного периода времени.
Критичный – недопустимый выход за значения показателей (относится как к автоматическому, так и к ручному управлению системой).
Режим работы системы индицируется устройством PC3.
Управление в локальном режиме.
Использование режима ручного управления может быть обусловлено:
1. Принципиальным неиспользованием облачного или удаленного/управляющего РС2.
2. Длительными перебоями в работе удаленного РС2, проблемами со связью, отключением и т.п.
3. Решением пользователя об отказе использования удаленного облачного РС2 (отказ от продления/приобретения лицензии на использование, сомнения в обеспечении конфиденциальности информации и др.).
В локальном режиме работы начинаются с установления прямого соединения между РС1 и РС3. Если РС1 находится в рабочем режиме, он передает на РС3 текущие показания датчиков Д. Дальнейшее управление осуществляется оператором в соответствии с информацией, полученной от РС3: РС3 – РС1 – Иn.
Оператор на основе полученной от РС3 информации о текущем состоянии среды выращивания и имеющихся у него данных, получаемых из справочно-информационных источников, уровня знания и опыта задаёт номинальные значения параметров выращивания (циклограмму) для РС1.
Прием номинальных значений параметров РС1 от РС3, установленных пользователем в соответствии с полученной информацией в локальном режиме, обеспечивает работоспособность системы при невозможности или нецелесообразности использования облачного режима управления системой.
Управление в ручном режиме с помощью РС3 осуществляется пользователем только в режиме реального времени. В локальном режиме один РС3 может управлять несколькими РС1, но каждый из PC1 может управляться единственным PC3.
Пример способа выращивания салата в локальном режиме:
1. Для запуска выращивания оператор принимает решение о значениях номинальных параметров выращивания для указанной сельскохозяйственной культуры исходя из собственного опыта и внешних источников информации и задаёт номинальные параметры выращивания при помощи приложения «Grolli One» на PC3. Полный перечень параметров:
Световые параметры:
• длительность рассвета – 30 мин;
• длительность заката – 30 мин;
• длительность дня – 17 ч (включает рассвет и закат);
• длительность ночи – 7 ч;
• максимальный уровень красного спектра – 100 % от максимальной мощности лампы;
• максимальный уровень синего спектра – 95 % от максимальной мощности лампы;
• в режиме рассвета сначала синий спектр достигает максимума, потом красный;
• в режиме заката сначала синий спектр достигает 0, потом красный.
Климатические параметры:
• допустимый диапазон температуры днём – 15–30 °С;
• допустимый диапазон температуры ночью – 15–30 °С;
• допустимый диапазон влажности днём – 50–85 %;
• допустимый диапазон влажности ночью – 50–85 %;
• минимальный уровень СO2 – 750 ppm.
Питательный раствор:
• рабочий диапазон pH – 5,4–5,8;
• рабочий диапазон EC – 1700–1900 us;
• длительность подачи раствора – 18 мин;
• паузы между подачами – 1 ч 30 мин;
• кормление ночью включено;
• температура питательного раствора –20–35 °C.
2. PC1 начинает контролировать процесс выращивания в четырёх параллельных процессах:
согласно расписанию освещённости меняет уровень на пропорциональных регуляторах синего и красного спектра;
согласно расписанию кормления выполняет следующие действия:
подготавливает питательный раствор:
включает насос циркуляции и открывает клапан перемешивания;
путём периодического включения насосов подачи концентратов приводит показания датчиков EC и pH в рабочий диапазон;
кормит растения:
закрывает клапан перемешивания и открывает клапан кормления;
ждет указанное в расписании время;
выключает клапан кормления и насос циркуляции;
ожидает возврата питательного раствора:
на основе контроля датчиков уровня раствора в баке контролирует возврат питательного раствора в бак;
если счётчик залитой воды показывает значение больше определённого порога, то сбрасывает отработанный раствор в канализацию путём включения клапана слива;
если датчик максимального уровня в баке так и не включился или был сброс раствора, то выполняет долив воды путём открытия клапана долива до включения датчика максимального уровня;
периодически сверяет показания датчика CO2 с минимальным уровнем. Если показания датчика меньше, то открывает баллон с CO2 на указанное время;
каждую минуту в режиме приготовления раствора и кормления или каждые 10 мин в других режимах отправляет показания всех датчиков PC2, если связь есть, или сохраняет показания в энергонезависимой памяти, если связи нет. При появлении связи отправляет все хранящиеся в энергонезависимой памяти показатели и стирает их.
3. На очередном цикле подготовки питательного раствора датчик концентрата сообщает о низком уровне концентрата в баке. PC1 передаёт эту информацию PС3.
4. PC3 сообщает аудиовизуально оператору о необходимости действия – пополнения концентрата.
5. Оператор игнорирует эту информацию и концентрат заканчивается.
6. PC1 на основе показания уровня концентрата принимает решение о переходе в режим только полива без подготовки питательной смести. PC1 уведомляет об этом PC3.
7. PC3 сообщает аудиовизуально оператору о второй проблеме – отключении режима кормления. Снимки экрана мобильного приложения представлены на фиг. 2.
8. Оператор обращает внимание на индикацию на PC3 и выполняет действие по доливу концентрата. Канистру с концентратом оператор выбирает на основе собственного опыта/инструкций по эксплуатации системы.
9. PC1 получает от датчика концентрата подтверждение, что уровень концентрата достаточен, уведомляет PC3 и возобновляет процесс выращивания.
10. PC3 снимает индикацию недостатка концентрата.
11. Оператор просматривает историю показаний датчиков на PC3 и понимает, что определённое время растения были лишены питания. Пользователь принимает решение вручную скорректировать программу выращивания:
на PC3 пользователь корректирует параметры выращивания, увеличивая частоту кормлений. Cкриншот экрана мобильного приложения представлен на фиг. 3;
PC3 сообщает PC1 скорректированные параметры выращивания, которых в дальнейшем будет придерживаться PC1.
Пример способа выращивания салата в облачном режиме:
Для запуска выращивания оператор сканирует при помощи PC3 метку на пакете семян.
PC3 отправляет декодированную метку PC2.
PC2 находит в собственном справочнике информацию об оптимальных параметрах выращивания и передаёт их PC1. Полный перечень параметров:
Световые параметры:
длительность рассвета – 30 мин;
длительность заката – 30 мин;
длительность дня – 17 ч (включает рассвет и закат);
длительность ночи – 7 ч;
максимальный уровень красного спектра – 100 % от максимальной мощности лампы;
максимальный уровень синего спектра – 95 % от максимальной мощности лампы;
в режиме рассвета сначала синий спектр достигает максимума, потом красный;
в режиме заката сначала синий спектр достигает 0, потом красный.
Климатические параметры:
допустимый диапазон температуры днём – 15–30 °С;
допустимый диапазон температуры ночью – 15–30 °С;
допустимый диапазон влажности днём – 50–85 %;
допустимый диапазон влажности ночью – 50–85 %;
минимальный уровень СO2 – 750 ppm.
Питательный раствор:
рабочий диапазон PH – 5,4–5,8;
рабочий диапазон EC – 1700–1900 us;
длительность подачи раствора – 18 мин;
паузы между подачами – 1 ч 30 мин;
кормление ночью включено;
температура питательного раствора – 20–35 °C.
PC1 начинает контролировать процесс выращивания в четырёх параллельных процессах:
согласно расписанию освещённости меняет уровень на пропорциональных регуляторах синего и красного спектра;
согласно расписанию кормления выполняет следующие действия:
подготавливает питательный раствор:
включает насос циркуляции и открывает клапан перемешивания;
путём периодического включения насосов подачи концентратов приводит показания датчиков EC и pH в рабочий диапазон;
кормит растения:
закрывает клапан перемешивания и открывает клапан кормления;
ждет указанное в расписании время;
выключает клапан кормления и насос циркуляции;
ожидает возврата питательного раствора:
на основе контроля датчиков уровня раствора в баке контролирует возврат питательного раствора в бак;
если счётчик залитой воды показывает значение больше определённого порога, то сбрасывает отработанный раствор в канализацию путём включения клапана слива;
если датчик максимального уровня в баке так и не включился или был сброс раствора, то выполняет долив воды путём открытия клапана долива до включения датчика максимального уровня;
периодически сверяет показания датчика CO2 с минимальным уровнем. Если показания датчика меньше, то открывает баллон с CO2 на указанное время;
каждую минуту в режиме приготовления раствора и кормления или каждые 10 мин в других режимах отправляет показания всех датчиков PC2, если связь есть, или сохраняет показания в энергонезависимой памяти, если связи нет. При появлении связи отправляет все хранящиеся в энергонезависимой памяти показатели и стирает их.
На очередном цикле подготовки питательного раствора датчик концентрата сообщает о низком уровне концентрата в баке. PC1 передаёт эту информацию PС2.
PC2 передает информацию PC3. PC3 сообщает аудиовизуально оператору о необходимости действия – пополнения концентрата.
Оператор игнорирует эту информацию и концентрат заканчивается.
PC1 на основе показания уровня концентрата принимает решение о переходе в режим только полива без подготовки питательной смести. PC1 уведомляет об этом PC2.
PC2 передает информацию PC3. PC3 сообщает аудиовизуально оператору о второй проблеме – отключении режима кормления. Снимки экрана мобильного приложения представлены на фиг. 2.
Оператор обращает внимание на индикацию на PC3 и выполняет действие по доливу концентрата:
при помощи PC3 оператор сканирует машинно-считываемую метку на канистре. PC3 отправляет информацию об идентификаторе концентрата PC2;
PC2 подтверждает правильность раствора отправкой сообщения PC3;
PC3 убирает индикацию о необходимости долива концентрата;
PC2 по справочнику определяет, что раствор отличается от использованного ранее и корректирует параметры выращивания, изменяя рабочий диапазон EC. Скорректированные параметры передаются PC1.
PC1 получает скорректированные параметры выращивания.
PC1 получает от датчика концентрата подтверждение, что уровень концентрата достаточен, уведомляет PC2 и возобновляет процесс выращивания в соответствии с новыми параметрами.
PC2 пересылает информацию о новом уровне датчика PC3.
PC3 снимает индикацию недостатка концентрата.
Устройство «Виртуальный Агроном» (один из вариантов реализации PC1) представляет собой совокупность следующих элементов:
1. Встроенные датчики температуры воздуха, влажности воздуха, концентрации углекислого газа, а также разъемы для подключения различных внешних датчиков качества воды и воздуха – позволяют определить текущее состояние рабочей среды, которые передают на РС1.
2. Исполнительные устройства – реле для управления освещением, широтно-импульсной модуляцией (PWM) двух световых каналов, насосами, электромагнитными клапанами. Обеспечивают поддержание заданных параметров на основании команд, получаемых от РС1.
3. Плата блока управления, содержащаяся в РС1, с установленным микрокомпьютером и программой управления, оснащена модулем подключения к сети интернет через адаптеры Wi-Fi и LAN.
Блок управления РС1, используя адаптеры Wi-Fi и/или LAN, подключается к удаленному серверу РС2, расположенному в облаке Yandex, передает на него данные, полученные с датчиков, и принимает циклограммы, на основе которых PC1 формирует команды для управления исполнительными устройствами. При отсутствии подключения к удаленному компьютеру РС2 устройство PC1 действует на основе последней полученной циклограммы.
PC1 получает от PC2 или PC3 два типа команд:
1) задание диапазонов, в которых нужно выдерживать параметры. Далее PC1 может работать автономно сколь угодно долго, стараясь удержать параметры в диапазонах при помощи исполнительных устройств;
2) непосредственные команды, такие как слив воды или перезагрузка микрокомпьютера. Команда выполняется однократно по получению.
При помощи мобильного устройства РС3 (телефона, планшета, ноутбука) можно через удаленный компьютер РС2 считывать показания датчиков и управлять процессами выращивания растений.
Устройство Grolli Air, метеостанция (второй вариант реализации PC1). Предназначено для мониторинга и поддержания микроклимата растений, для реализации цикла управления освещением и управления двумя исполнительными устройствами, такими как реле для осуществления подачи CO2.
Устройство мониторит микроклимат для управления с помощью датчиков температуры и влажности SHT31 и датчика CO2 ACD10/T6703 (в зависимости от исполнения).
Устройство Grolli Air подключается к серверу PC2, расположенному в облаке Yandex, при помощи технологии IoT Core.
Устройство содержит два ШИМ-канала, используемых для задания яркости светильников, а также три реле, каждое из которых можно сконфигурировать под следующие роли:
• всегда выключено;
• освещение;
• впрыск CO2;
• нагреватель;
• охладитель;
• увлажнитель;
• осушитель;
• выход от таймера для кормления.
Заявленные способ и система управления выращиванием растений в условиях контролируемой среды реализованы в условиях опытного хозяйства выращивания растений и могут быть широко использованы для выращивания широкого ассортимента растений в условиях различных климатических зон.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и система выращивания растений в управляемых условиях | 2023 |
|
RU2800522C1 |
| Способ определения трёхосной пространственной ориентации космического аппарата | 2018 |
|
RU2696317C1 |
| ДОМАШНИЙ КОММУНИКАЦИОННЫЙ ШЛЮЗ | 2011 |
|
RU2584511C2 |
| ПРОЦЕСС ПОЛИМЕРИЗАЦИИ СО СТАДИЕЙ ЧАСТИЧНОГО ОТКЛЮЧЕНИЯ | 2016 |
|
RU2682328C1 |
| СОЛНЕЧНАЯ ЭЛЕКТРОСТАНЦИЯ | 2006 |
|
RU2312426C1 |
| ОБРАБОТКА ПЫЛИ | 2016 |
|
RU2655225C1 |
| Способ определения типа биологической ткани | 2017 |
|
RU2676647C1 |
| Облучательная установка для теплиц | 2023 |
|
RU2823303C1 |
| ГЕЛИОКОТЕЛ | 2003 |
|
RU2251058C2 |
| ЦИФРОВОЙ ОТЛАДОЧНЫЙ КОМПЛЕКС | 2021 |
|
RU2773696C1 |

Изобретение относится к способам и устройствам управления выращиванием растений в условиях контролируемой среды. Способ предусматривает сбор, обработку и фиксацию снимаемых датчиками показателей о текущем состоянии контролируемых показателей среды, сопоставление контролируемых показателей с номинальными, определение на основании полученных данных необходимых корректив и передачу их на исполнительные устройства. Управление выращиванием растений осуществляют в двух взаимодополняющих или заменяющих режимах: облачном и локальном, для чего осуществляют: сбор, накопление, фиксацию и передачу устройством управления и сбора данных РС1 с установленной частотой полученных от датчиков Д текущих показателей в облачном режиме на устройство регулирования и хранения информации РС2 и в локальном режиме – на устройство дистанционного управления РС3, связанное или включающее терминал пользователя; накопление устройством РС2 полученной информации; сопоставление текущих показателей датчиков Д в устройстве РС1 с установленными номинальными значениями, содержащимися в энергонезависимой памяти устройства РС1; отображение текущих показателей от датчиков Д на устройстве РС3. В случае если текущие показатели выходят за установленные допустимые границы в установленных пределах, устройство РС1 определяет требуемые коррективы и направляет соответствующую команду на исполнительные устройства И. Устройство РС1 сохраняет полученные от устройства РС2 номинальные значения в энергонезависимой памяти для последующего сопоставления с показаниями датчиков Д. В случае если текущие показатели от датчиков Д за определенный период времени критически выходят за установленные допустимые границы, для информации пользователя PC1 подает уведомление на устройство PC2 в облачном режиме или РС3 – в локальном режиме, PC2 передаёт уведомление на устройство PC3 и/или электронную почту, PC3 подаёт пользователю звуковой или световой сигнал. В случае отсутствия, или прерывания, или отказа от связи между устройством РС1 с устройством РС2 в облачном режиме или с устройством PC3 в локальном режиме работа системы продолжается на основе номинальных показателей, содержащихся в энергонезависимой памяти PC1. При этом номинальные показатели могут быть скорректированы с помощью устройства РС3 в локальном режиме, исходя из текущих показателей датчиков Д, полученных от устройства РС1. Система содержит устройство управления и сбора данных, связанное с удаленным устройством регулирования и хранения информации, датчики мониторинга рабочих параметров системы, исполнительные устройства системы и дополнительно – устройство дистанционного управления, связанное или включающее терминал пользователя. Технической результат заключается в повышении качества управления процессом роста с учетом исторической информации и информации из баз данных о текущих или установленных условиях выращивания растений. 2 н. и 9 з.п. ф-лы, 3 ил.
1. Способ управления выращиванием растений в условиях контролируемой среды, включающий сбор, обработку и фиксацию показателей, снимаемых датчиками Д, о текущем состоянии контролируемых показателей среды, сопоставление контролируемых показателей с номинальными, определение на основе полученных данных необходимых корректив и передачу их на исполнительные устройства И, отличающийся тем, что
управление выращиванием растений в условиях контролируемой среды осуществляют в двух взаимодополняющих или заменяющих режимах: облачном и локальном, для чего осуществляют:
- сбор, накопление, фиксацию и передачу устройством управления и сбора данных РС1 с установленной частотой полученных от датчиков Д текущих показателей в облачном режиме на удаленное устройство регулирования и хранения информации РС2 и в локальном режиме - на устройство дистанционного управления РС3, связанное или включающее терминал пользователя,
- накопление устройством РС2 полученной информации,
- сопоставление текущих показателей датчиков Д в устройстве РС1 с установленными номинальными значениями, содержащимися в энергонезависимой памяти устройства РС1,
- отображение текущих показателей от датчиков Д на устройстве РС3;
в случае если текущие показатели выходят за установленные допустимые границы в установленных пределах, устройство РС1 определяет требуемые коррективы и направляет соответствующую команду на исполнительные устройства И;
устройство РС1 сохраняет полученные от устройства РС2 номинальные значения в энергонезависимой памяти для последующего сопоставления с показаниями датчиков Д;
в случае если текущие показатели от датчиков Д за определенный период времени критически выходят за установленные допустимые границы, для информации пользователя PC1 подает уведомление на устройство PC2 в облачном режиме или РС3 - в локальном режиме, PC2 передает уведомление на устройство PC3 и/или электронную почту, PC3 подает пользователю звуковой или световой сигнал;
в случае отсутствия, или прерывания, или отказа от связи между устройством РС1 с устройством РС2 в облачном режиме или с устройством PC3 в локальном режиме работа системы продолжается на основе номинальных показателей, содержащихся в энергонезависимой памяти PC1;
при этом номинальные показатели могут быть скорректированы с помощью устройства РС3 в локальном режиме, исходя из текущих показателей датчиков Д, полученных от устройства РС1.
2. Способ по п. 1, отличающийся тем, что полученные устройством РС1 текущие показатели датчиков Д сохраняются в энергонезависимой памяти устройства РС1.
3. Способ по п. 1, отличающийся тем, что энергонезависимая память устройства РС1 содержит базу данных с инструкциями - циклограмму с номинальными режимами для управления исполнительными устройствами И.
4. Способ по п. 3, отличающийся тем, что номинальные режимы энергонезависимой памяти устройства PC1 содержат одну циклограмму, которую PC1 использует в текущем процессе выращивания.
5. Способ по п. 1, отличающийся тем, что передача устройством РС1 текущих показателей от датчиков Д на устройство РС2 осуществляется пакетами данных за определенный период времени.
6. Способ по п. 1, отличающийся тем, что полученные от устройства РС1 устройством РС2 текущие показатели от датчиков Д обрабатываются и анализируются с помощью соответствующей программы для ЭВМ и сохраняются в базе данных устройства РС2.
7. Способ по п. 1, отличающийся тем, что передаваемые от устройства РС1 исполнительным устройствам И команды корректируются РС1 с учетом накопленной информации о соотношении «воздействие/результат» и записываются в энергонезависимой памяти устройства PC1.
8. Способ по п. 1, отличающийся тем, что информация о состоянии и/или наличии объектов среды выращивания считывается РС3 с машинно-считываемой метки.
9. Способ по п. 1, отличающийся тем, что воздействие над объектами среды выращивания осуществляют на основе информации, содержащейся на установленной на объекте машинно-считываемой метке, считывание которой осуществляют устройством PC3, при этом полученная информация передается на РС2, где она сопоставляется с имеющимися данными, на основании чего формируются и подаются новые значения номинальных показателей - циклограмма выращивания на РС1 и информация на РС3.
10. Способ по п. 8, отличающийся тем, что в случае выявления метки, не соответствующей выполняемому шагу/действию, происходит звуковая или визуальная индикация с демонстрацией инструкции о выполнении правильного действия.
11. Система управления выращиванием растений в условиях контролируемой среды, содержащая устройство управления и сбора данных РС1, связанное с удаленным устройством регулирования и хранения информации РС2, датчики мониторинга рабочих параметров системы Д и исполнительные устройства системы И, отличающаяся тем, что
система для выращивания растений дополнительно содержит устройство дистанционного управления РС3, связанное или включающее терминал пользователя,
дистанционно связанное с устройством РС1 или устройством РС2,
при этом устройство РС1:
- содержит энергонезависимую память, в которой хранятся номинальные значения показателей для текущего процесса выращивания,
- выполнено с возможностью принятия, обработки, накопления и хранения информации от одного или более датчиков Д, осуществляющих мониторинг различных показателей системы, в частности, таких как температура, состав воздуха, интенсивность света, влажность и состав питательного раствора,
- выполнено с возможностью получения и передачи управляющих команд на исполнительные устройства И, осуществляющие, в частности, подачу питания, воды, света, углекислого газа;
при этом устройство РС2 выполнено в форме облачного сервера, содержащего базу данных номинальных режимов выращивания разных сельскохозяйственных культур, в частности в зависимости от условий выращивания и/или фазы развития растений, включая температуру, влажность, концентрацию углекислого газа, интенсивность света, проводимость питательного раствора и значение pH, и
- с возможностью направления уведомления на устройство РС3 и/или электронную почту в случае выхода полученной от РС1 сопоставленной информации за границы номинальных значений,
- c возможностью направления на устройство PC1 номинальных значений показателей, полученных от PC3 или выбранных из справочника согласно указанной на PC3 сельскохозяйственной культуре,
- с возможностью накопления приходящей от PC1 информации о значениях датчиков Д;
при этом устройство РС3 выполнено с возможностью:
- получения, представления в локальном режиме от устройства РС1 или в облачном режиме от РС2 информации о рабочих показателях системы, в частности таких как температура, состав воздуха, интенсивность света, влажность и частота дозирования питательных веществ,
- получения уведомления от устройства РС2 о степени соответствия полученной от РС1 информации номинальным значениям, содержащимся в базе данных РС2,
- получения уведомлений от устройства PC1 о степени соответствия показаний датчиков Д номинальным значениям, содержащимся в энергонезависимой памяти PC1,
- передачи на PC2 в облачном режиме номинальных значений для выращивания или информации о сельскохозяйственной культуре из справочника на PC2,
- передачи на PC1 в локальном режиме номинальных значений для выращивания;
при этом удаленное устройство РС2 связано с устройством РС1 и с устройством РС3 через модуль связи дистанционно.
| US 20210307269 A1, 07.10.2021 | |||
| WO 201618767 A1, 04.02.2016 | |||
| US 20200229357 A1, 23.07.2020 | |||
| US 20140144078 A1, 29.05.2014 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОРРЕКТИРОВКИ УСЛОВИЙ ОКРУЖАЮЩЕЙ СРЕДЫ ДЛЯ ВЫРАЩИВАНИЯ РАСТЕНИЙ | 2015 |
|
RU2638843C2 |
| EA 37080 B1, 03.02.2021. | |||
