Изобретение относится к измерительной технике и может быть использовано для высокоточного определения пространственной ориентации координатных осей космического аппарата (КА) в инерциальной системе отсчета, связанной с Землей.
Известны способы определения пространственной ориентации КА на основе результатов измерений бортовых измерительных средств КА [1, 2]. Основным недостатком способов является применение измерительных средств, которые нуждаются в передаче навигационной информации о пространственной ориентации КА по трассе КА - центр управления полетом (ЦУП) и, таким образом, зависят от функционирования аппаратуры электропитания КА.
Наиболее близким к заявленному изобретению является способ определения пространственной ориентации КА «Рефлектор», заключающийся в определении направления координатных осей системы координат космического аппарата в инерциальной системе отсчета, включающий генерацию и посыл серии лазерных импульсов от квантово-оптической станции (КОС) в направлении ретрорефлекторных систем (PC), установленных на КА и состоящих из уголковых отражателей (УО), регистрацию отраженных сигналов и расчет дальностей от опорной точки КОС до базовых точек каждых PC [3]. КА «Рефлектор» представляет собой сварную несущую раму с 32 УО, которые установлены в трех группах на разном расстоянии вдоль оси сориентированной к центру Земли таким образом, чтобы при облучении КА излучением от лазерного передатчика КОС отражали от 4 до 6 УО, расположенных в разных группах. Фотоприемник КОС регистрирует отраженные импульсы, каждый из которых соответствует определенной группе УО. Результаты лазерных измерений дальности до КА «Рефлектор» представляют собой три трека, каждый из которых соответствует отражению лазерного излучения от определенной группы УО.
Недостатком представленного способа является то, что уголковые отражатели в КА «Рефлектор» отражают лазерное излучение с любым состоянием поляризации и, таким образом, невозможно селектировать сигналы, приходящие от разных групп УО.
Целью изобретения является разработка способа определения трехосной пространственной ориентации координатных осей КА в инерциальной системе отсчета, связанной с КОС, по результатам измерения спутниковой лазерной дальнометрии от КОС до ретрорефлекторного комплекса (РК), состоящего из трех PC, две из которых отражают лазерное излучение с правым или левым круговым состоянием поляризации.
С целью исключения вышеуказанных недостатков, в способе определения трехосной пространственной ориентации космического аппарата (КА) перед генерацией ретрорефлекторные системы объединяют в ретрорефлекторный комплекс (РК), включающий три PC с координатами базовой точки R1x, R1y, R1z первой PC (PC1), координатами базовой точки R2x, R2y, R2z второй PC (PC2) и координатами базовой точки R3x, R3y, R3z третьей PC (РС3) в системе координат КА, изменяют отражающую способность уголковых отражателей РС2 и РС3 для левого и правого кругового состояний поляризации лазерного излучения с помощью установки двух оптических элементов на входные грани УО, четвертьволновой фазовой пластинки и поляризатора, в РС2 для отражения лазерного излучения с левой круговой поляризацией оптические элементы устанавливают в последовательности поляризатор, четвертьволновая пластинка таким образом, чтобы пропускающая ось поляризатора была повернута относительно медленной оси четвертьволновой пластинки на угол 45 градусов по часовой стрелке при наблюдении в направлении по нормали на входную грань УО, а в РС3 для отражения лазерного излучения с правой круговой поляризацией оптические элементы устанавливают в последовательности поляризатор, четвертьволновая пластинка таким образом, чтобы пропускающая ось поляризатора была повернута относительно медленной оси четвертьволновой пластинки на угол 45 градусов против часовой стрелки при наблюдении в направлении по нормали на входную грань уголкового отражателя, после генерации посыл серии лазерных импульсов выполняют поочередно с правой и левой круговой поляризацией излучения, при этом координаты ρх, ρy, ρz вектора направления посыла серии лазерных импульсов в инерциальной системе отсчета рассчитывают по азимутальному углу и зенитному углу наведения передающего телескопа КОС в направлении на ретрорефлекторный комплекс, после регистрации отраженных сигналов по результатам расчета дальности проводят следующие действия, по результатам расчета дальности от опорной точки КОС до базовой точки РС1 с учетом расчета координат ρх, ρy, ρz вектора направления посыла серии лазерных импульсов определяют координаты единичной орты ex1, ех2, ех3 оси Х, совпадающей по направлению с вектором орбитальной скорости КА в инерциальной системе отсчета, по результатам расчета дальностей от опорной точки КОС до базовых точек РС1, РС2 и РС3 рассчитывают разность дальности ΔL12 между PC1 и РС2 и разность дальности ΔL13 между РС1 и РС3, далее с помощью численного решения системы нелинейных уравнений рассчитывают углы θx θy, θz между осями системы координат КА и вектором направления посыла лазерных импульсов:
где
θx, θy, θz - углы между осями системы координат КА и вектором направления распространения лазерных импульсов,
R1x, R1y, R1z - координаты базовой точки PC1 в системе координат КА,
R2x, R2y, R2z - координаты базовой точки РС2 в системе координат КА,
R3x, R3y, R3z - координаты базовой точки РС3 в системе координат КА,
 - расстояние между базовой точкой РС1 и базовой точкой РС2,
- расстояние между базовой точкой РС1 и базовой точкой РС2,
 - расстояние между базовой точкой РС1 и базовой точкой РС3,
- расстояние между базовой точкой РС1 и базовой точкой РС3,
по результатам расчета углов θx θy, θz, координат единичной орты ex1, ех2, ех3 и координат ρх, ρy, ρz вектора направления посыла серии лазерных импульсов в инерциальной системе отсчета с помощью решения системы линейных уравнений рассчитывают координаты единичной орты ey1, еу2, еу3 в инерциальной системе отсчета:

по результатам расчета координат единичной орты ех1, ех2, ех3 оси X системы координат К А и координат единичной орты ey1, еу2, еу3 оси Y системы координат КА рассчитывают координаты единичной орты ez1, ez2, ez3 координатной оси Z системы координат КА в инерциальной системе отсчета:
ez1=ех2еу1-ex3ey1, ez2=ex3ey1-ex3ey3, ez3=ex1ey2-ex2ey1
Способ определения трехосной пространственной ориентации КА, заключающийся в определении направления координатных осей системы координат КА в инерциальной системе отсчета, осуществляется в следующей последовательности.
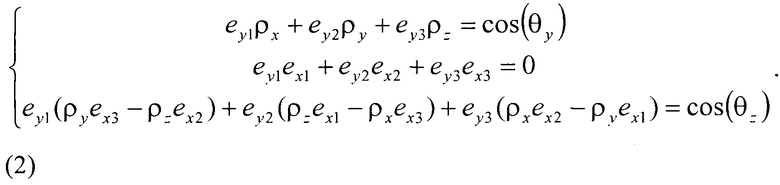
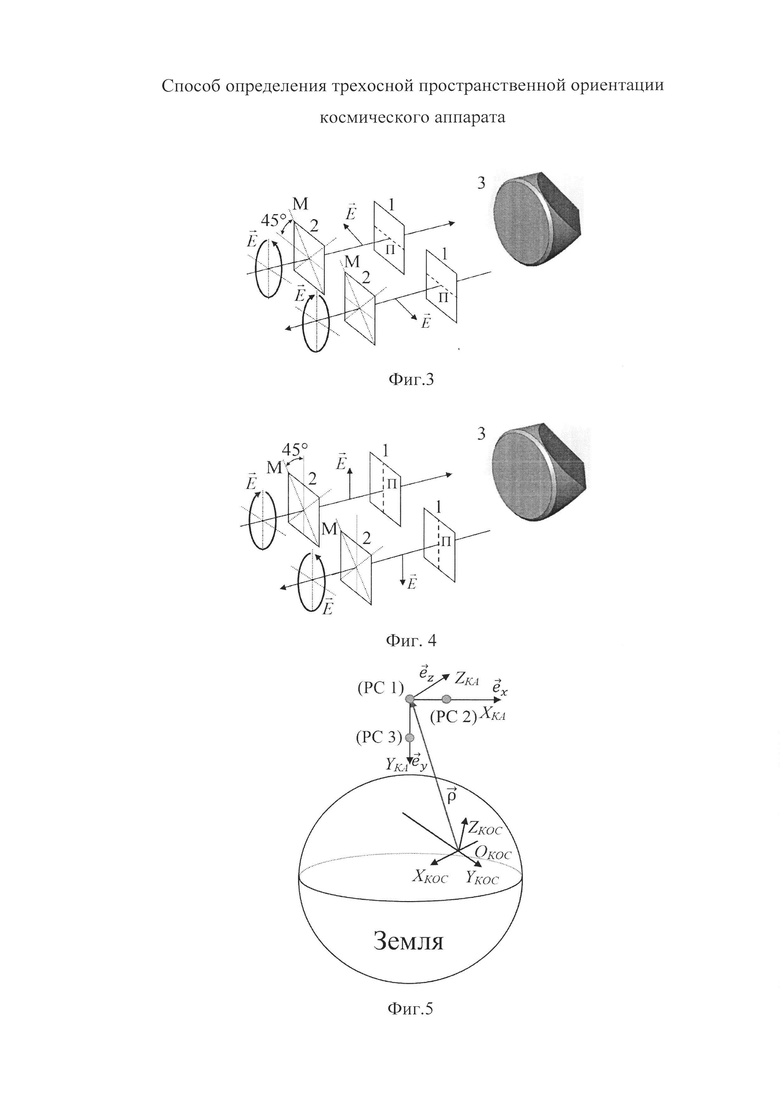
Ретрорефлекторные системы, установленные на КА и состоящие из УО объединяют в ретрорефлекторный комплекс (РК), включающий три PC с координатами базовой точки R1x, R1y, R1z PC1, координатами базовой точки R2x, R2y, R2z PC2 и координатами базовой точки R3x, R3y, R3z РС3 в системе координат КА. Иллюстрация расположения базовых точек PC в системе координат КА представлена на фиг. 1.
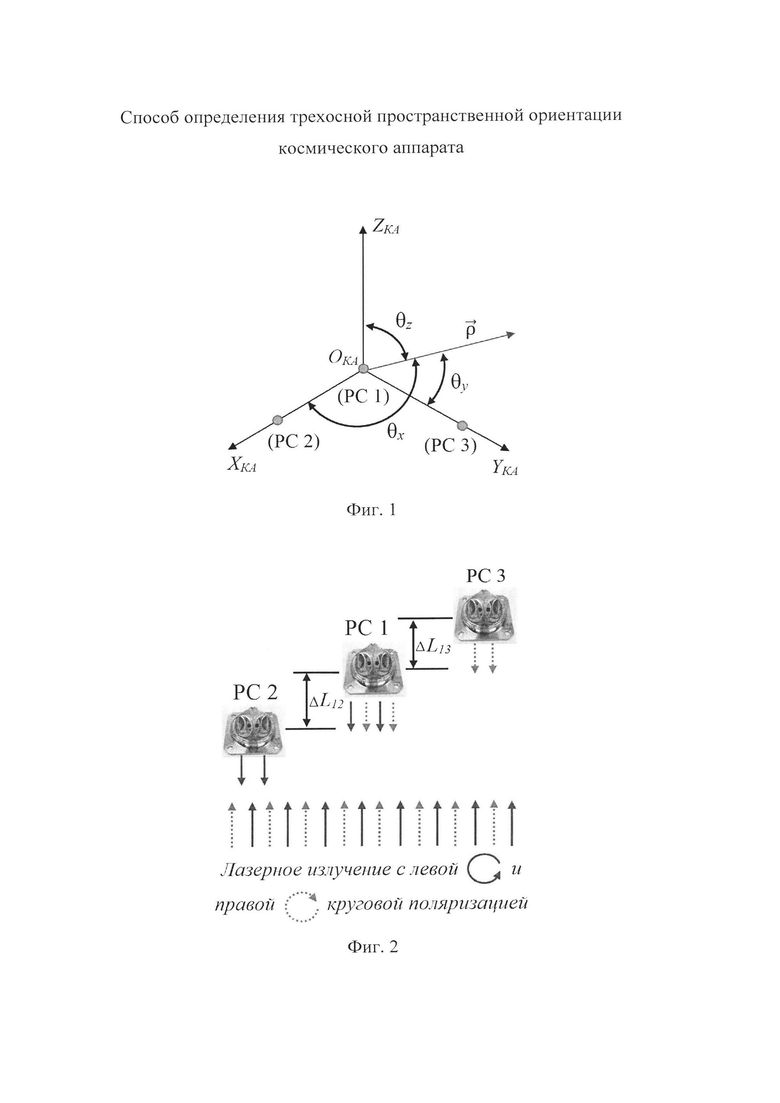
Для поляризационного разделения сигналов от трех PC в составе РК изменяют отражающую способность уголковых отражателей в РС2 и РС3 для левого и правого кругового состояний поляризации лазерного излучения с помощью установки двух оптических элементов на входные грани УО: четвертьволновой фазовой пластинки и поляризатора. Отражение лазерного излучения с левой и правой круговой поляризацией от PC1, РС2 и РС3 поясняется фиг. 2.
В РС2 для отражения лазерного излучения с левой круговой поляризацией оптические элементы устанавливают в последовательности поляризатор 1, четвертьволновая пластинка 2 таким образом, чтобы пропускающая ось поляризатора П была повернута относительно медленной оси М четвертьволновой пластинки на угол 45 градусов по часовой стрелке при наблюдении в направлении по нормали на входную грань УО 3. Отражение лазерного излучения с левой круговой поляризацией от УО в РС2 поясняется фиг. 3.
В РС3 для отражения лазерного излучения с правой круговой поляризацией оптические элементы устанавливают в последовательности поляризатор 1, четвертьволновая пластинка 2 таким образом, чтобы пропускающая ось поляризатора П была повернута относительно медленной оси М четвертьволновой пластинки на угол 45 градусов против часовой стрелки при наблюдении в направлении по нормали на входную грань УО. Отражение лазерного излучения с правой круговой поляризацией от УО в РС3 поясняется фиг.4.
Излучение с круговым состоянием поляризации после прохождения четвертьволновой пластинки становится линейно поляризованным.
Ориентация вектора  лазерного излучения после прохождения четвертьволновой пластинки зависит от правого или левого кругового состояния поляризации. Сориентированная ось поляризатора параллельна вектору
лазерного излучения после прохождения четвертьволновой пластинки зависит от правого или левого кругового состояния поляризации. Сориентированная ось поляризатора параллельна вектору  как представлено на фиг. 1 и фиг. 2, позволяет добиться пропускания, падающего на УО лазерного излучения. На УО в РС1 на фиг.3 отсутствуют оптические элементы, поэтому PC1 отражает лазерное излучение с любым состоянием поляризации.
как представлено на фиг. 1 и фиг. 2, позволяет добиться пропускания, падающего на УО лазерного излучения. На УО в РС1 на фиг.3 отсутствуют оптические элементы, поэтому PC1 отражает лазерное излучение с любым состоянием поляризации.
Далее происходит генерация и посыл серии лазерных импульсов от КОС в направлении РК из PC, установленных на КА и состоящих из УО. Посыл серии лазерных импульсов выполняют поочередно с правой и левой круговой поляризацией излучения, при этом координаты ρх, ρy, ρz вектора направления посыла серии лазерных импульсов в инерциальной системе отсчета рассчитывают по азимутальному углу и зенитному углу наведения передающего телескопа КОС в направлении на РК. Расположение системы координат КА относительно инерциальной системы отсчета ХКОС УКОС ZКОС поясняется фиг. 5.
Затем лазерное излучение с левой круговой поляризацией отражается от РС1 и РС2, а с правой круговой поляризацией от PC1 и PC3 в направлении на фотоприемник КОС, который проводит регистрацию отраженных сигналов.
По результате проведения операций генерации и посыла серии лазерных импульсов, отражения импульсов от PCI, РС2, РС3, регистрации сигналов фотоприемником КОС рассчитывают три дальности от опорной точки КОС до базовых точек PC1, РС2, РС3.
По результатам расчета дальностей проводят следующие действия.
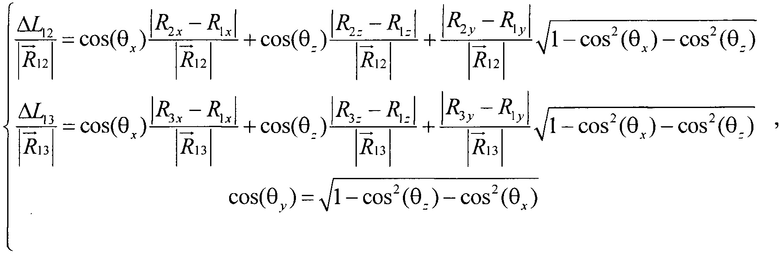
По результатам расчета дальности от опорной точки КОС до базовой точки РС1 с учетом расчета координат ρх, ρy, ρz вектора направления посыла серии лазерных импульсов определяют координаты единичной орты ех1, ех2, ех3 оси ХКА, совпадающей по направлению с вектором орбитальной скорости КА в инерциальной системе отсчета, центр которой располагается в опорной точке КОС. По результатам расчета дальностей от опорной точки КОС до базовых точек PC1, РС2 и РС3 рассчитывают разность дальности ΔL12 между РС1 и РС2 и разность дальности ΔL13 между РС1 и РС3.
Способ определения пространственной ориентации КА основан на использовании результатов расчета разности дальностей ΔL12 и ΔL13. По результатам расчета разности дальностей ΔL12 и ΔL13 рассчитывают углы θx θy, θz между осями системы координат КА и вектором направления посыла лазерных импульсов с помощью численного решения системы нелинейных уравнений (1):
где
θx, θy, θz - углы между осями системы координат КА ХКА УКА ZКА и вектором направления посыла лазерных импульсов
R1x, R1y, R1z - координаты базовой точки РС1 в системе координат КА,
R2x, R2y, R2z - координаты базовой точки РС2 в системе координат КА,
R3X, R3y, R3z - координаты базовой точки РС3 в системе координат КА,
 - расстояние между базовой точкой РС1 и базовой точкой РС2,
- расстояние между базовой точкой РС1 и базовой точкой РС2,
 - расстояние между базовой точкой РС1 и базовой точкой РС3.
- расстояние между базовой точкой РС1 и базовой точкой РС3.
По результатам расчета углов θx θy, θz, координат единичной орты ех1, ех2, ех3 и координат ρх, ρy, ρz вектора направления посыла серии лазерных импульсов с помощью решения системы линейных уравнений рассчитывают координаты единичной орты ey1, ey2, ey3 в инерциальной системе отсчета (2):
По результатам расчета координат единичной орты ех1, ех2, ех3 оси ХКА системы координат КА и координат единичной орты ey1, ey2, ey3 оси YКА системы координат КА рассчитывают координаты единичной орты ez1, ez2, ez3 координатной оси ZКА системы координат КА в инерциальной системе отсчета:
ez1=ех2еу1-ex3ey1, ez2=ex3ey1-ex3ey3, ez3=ex1ey2-ex2ey1
Технический результат предлагаемого способа заключается в отсутствии зависимости предлагаемого способа от функционирования аппаратуры электропитания КА и, таким образом, способ может быть использован при определении трехосной пространственной ориентации КА в аварийных случаях при поломке аппаратуры электропитания.
Список источников
1. А.С. Сыров, В.Н. Соколов, М.А. Шатский, А.Я. Лащев. Способ ориентации космического аппарата и устройств для его реализации. Патент РФ №2514649, 2014, бюл. №12.
2. С.В. Стрельников, Г.В. Кузьмин. Способ определения угловой ориентации космического аппарата по сигналу радионавигационного ориентира. Патент РФ №2367909, бюл. №26.
3. Р.Б. Немучинский, М.Ю. Овчинников. Определение ориентации космических аппаратов, оборудованных лазерными ретрорефлекторами, на примере наноспутника REFLECTOR // Сборник трудов второй всероссийской научно-технической конференции «Современные проблемы ориентации и навигации космических аппаратов», с 91-99, Москва, 2011 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ РЕАКТИВНЫХ СНАРЯДОВ | 2020 |
|
RU2747681C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТЕЛЕВИЗИОННЫМ ВИДЕОСПЕКТРАЛЬНЫМ КОМПЛЕКСОМ КОСМИЧЕСКОГО АППАРАТА | 1992 |
|
RU2068801C1 |
| КОЛЬЦЕВАЯ РЕТРОРЕФЛЕКТОРНАЯ СИСТЕМА | 2013 |
|
RU2529449C1 |
| Способ определения типа биологической ткани | 2017 |
|
RU2676647C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАКЛОННОЙ ДАЛЬНОСТИ ДО ДВИЖУЩЕЙСЯ ЦЕЛИ ПАССИВНЫМ МОНОСТАТИЧЕСКИМ ПЕЛЕНГАТОРОМ | 2014 |
|
RU2557808C1 |
| СПОСОБ КВАНТОВОГО КОДИРОВАНИЯ И ПЕРЕДАЧИ КРИПТОГРАФИЧЕСКИХ КЛЮЧЕЙ | 2012 |
|
RU2507690C1 |
| Автоматическая линия | 1980 |
|
SU918029A1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА КРЕНА ПОДВИЖНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2485538C1 |
| ОПТИЧЕСКИЙ ОТРАЖАТЕЛЬ (ВАРИАНТЫ) | 2013 |
|
RU2556744C2 |
| СПОСОБ АВТОНОМНОГО ИЗМЕРЕНИЯ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1994 |
|
RU2084901C1 |
Изобретение относится к измерительной технике и может быть использовано для высокоточного определения пространственной ориентации координатных осей космического аппарата (КА) в инерциальной системе отсчета, связанной с Землей. Ретрорефлекторные системы (РС), установленные на КА и состоящие из уголковых отражателей (УО), объединяют в ретрорефлекторный комплекс (РК), включающий три PC. Изменяют отражающую способность УО второй и третьей PC для левого и правого кругового состояний поляризации лазерного излучения с помощью установки двух оптических элементов на входные грани УО: четвертьволновой фазовой пластинки и поляризатора. Далее происходит генерация и посыл серии лазерных импульсов от квантово-оптической станции (КОС) в направлении PC, установленных на КА и состоящих из УО. Посыл серии лазерных импульсов выполняют поочередно с правой и левой круговой поляризацией излучения. Затем проводят регистрацию отраженных сигналов и расчет дальности. По результатам расчета дальностей от опорной точки КОС до базовых точек РС рассчитывают разность дальностей между РС. Технический результат - возможность применения способа при аварийных режимах работы КА. 5 ил.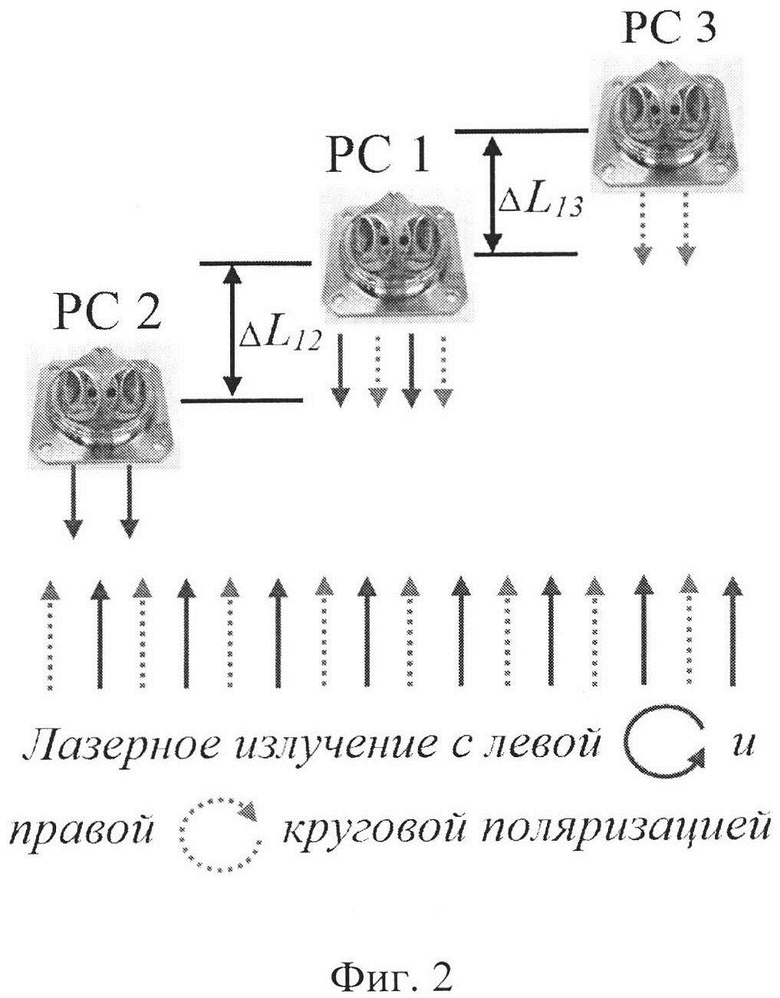
Способ определения трехосной пространственной ориентации космического аппарата (КА), заключающийся в определении направления координатных осей системы координат космического аппарата в инерциальной системе отсчета, включающий генерацию и посыл серии лазерных импульсов от квантово-оптической станции (КОС) в направлении ретрорефлекторных систем, установленных на КА и состоящих из уголковых отражателей (УО), регистрацию отраженных сигналов и расчет дальностей от опорной точки КОС до базовых точек каждых PC, отличающийся тем, что перед генерацией ретрорефлекторные системы (PC) объединяют в ретрорефлекторный комплекс, включающий три PC с координатами базовой точки R1x, R1y, R1z первой PC (PC1), координатами базовой точки R2x, R2y, R2z второй PC (PC2) и координатами базовой точки R3x, R3y, R3z третьей PC (РС3) в системе координат КА, изменяют отражающую способность уголковых отражателей РС2 и РС3 для левого и правого кругового состояний поляризации лазерного излучения с помощью установки двух оптических элементов на входные грани УО, четвертьволновой фазовой пластинки и поляризатора, в РС2 для отражения лазерного излучения с левой круговой поляризацией оптические элементы устанавливают в последовательности поляризатор, четвертьволновая пластинка таким образом, чтобы пропускающая ось поляризатора была повернута относительно медленной оси четвертьволновой пластинки на угол 45 градусов по часовой стрелке при наблюдении в направлении по нормали на входную грань УО, а в РС3 для отражения лазерного излучения с правой круговой поляризацией оптические элементы устанавливают в последовательности поляризатор, четвертьволновая пластинка таким образом, чтобы пропускающая ось поляризатора была повернута относительно медленной оси четвертьволновой пластинки на угол 45 градусов против часовой стрелки при наблюдении в направлении по нормали на входную грань уголкового отражателя, после генерации посыл серии лазерных импульсов выполняют поочередно с правой и левой круговой поляризацией излучения, при этом координаты ρх, ρу, ρz вектора направления посыла серии лазерных импульсов в инерциальной системе отсчета рассчитывают по азимутальному углу и зенитному углу наведения передающего телескопа КОС в направлении на ретрорефлекторный комплекс, после регистрации отраженных сигналов по результатам расчета дальности проводят следующие действия: по результатам расчета дальности от опорной точки КОС до базовой точки РС1 с учетом расчета координат ρх, ρу, ρz вектора направления посыла серии лазерных импульсов определяют координаты единичной орты ex1, ех2, ех3 оси X, совпадающей по направлению с вектором орбитальной скорости КА в инерциальной системе отсчета, по результатам расчета дальностей от опорной точки КОС до базовых точек PC1, РС2 и РС3 рассчитывают разность дальности ΔL12 между PC1 и РС2 и разность дальности ΔL13 между РС1 и РС3, далее с помощью численного решения системы нелинейных уравнений рассчитывают углы θx θy, θz между осями системы координат КА и вектором направления посыла лазерных импульсов:
где θx, θy, θz - углы между осями системы координат КА и вектором направления распространения лазерных импульсов,
R1x, R1y, R1z - координаты базовой точки РС1 в системе координат КА,
R2x, R2y, R2z - координаты базовой точки РС2 в системе координат КА,
R3x, R3y, R3z - координаты базовой точки РС3 в системе координат КА,
 - расстояние между базовой точкой РС1 и базовой точкой РС2,
- расстояние между базовой точкой РС1 и базовой точкой РС2,
 - расстояние между базовой точкой РС1 и базовой точкой РС3,
- расстояние между базовой точкой РС1 и базовой точкой РС3,
по результатам расчета углов θx θy, θz, координат единичной орты ex1, ех2, ех3 и координат ρх, ρу, ρz вектора направления посыла серии лазерных импульсов в инерциальной системе отсчета с помощью решения системы линейных уравнений рассчитывают координаты единичной орты ey1, ey2, ey3 в инерциальной системе отсчета:

по результатам расчета координат единичной орты ex1, ех2, ех3 оси X системы координат КА и координат единичной орты ey1, ey2, ey3 оси У системы координат КА рассчитывают координаты единичной орты ez1, ez2, ez3 координатной оси Z системы координат КА в инерциальной системе отсчета:
ez1 = ех2еу1-ex3ey1; ez2 = ex3ey1-ex1ey3; ez3 = ex1ey2-ex2ey1.
| КОЛЬЦЕВАЯ РЕТРОРЕФЛЕКТОРНАЯ СИСТЕМА | 2013 |
|
RU2529449C1 |
| СПОСОБ КАЛИБРОВКИ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ПО ВЕЛИЧИНЕ ЭФФЕКТИВНОЙ ПОВЕРХНОСТИ РАССЕЯНИЯ ПРИ ПРОВЕДЕНИИ ДИНАМИЧЕСКИХ ИЗМЕРЕНИЙ ЭФФЕКТИВНОЙ ПОВЕРХНОСТИ РАССЕЯНИЯ ИССЛЕДУЕМЫХ ОБЪЕКТОВ | 2011 |
|
RU2477495C1 |
| Многофункциональный космический аппарат | 2016 |
|
RU2640167C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА | 2015 |
|
RU2580827C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА ПО РАДИОНАВИГАЦИОННЫМ СИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ | 2014 |
|
RU2564523C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА ОТНОСИТЕЛЬНО ЦЕНТРА МАСС | 2015 |
|
RU2590287C1 |

