Настоящее изобретение относится к способам управления сцеплением колес управляемых осей железнодорожного транспортного средства.
На приборных панелях большинства современных железнодорожных транспортных средств установлены электронные системы, которые обычно включают в себя подсистемы управления проскальзыванием колес, способные подключаться как на стадии разгона, так и на стадии торможения Эти подсистемы известны как противобоксовочные системы, или системы препятствующие проскальзыванию, а также как WSP-системы (системы пневмоюзовой защиты колес).
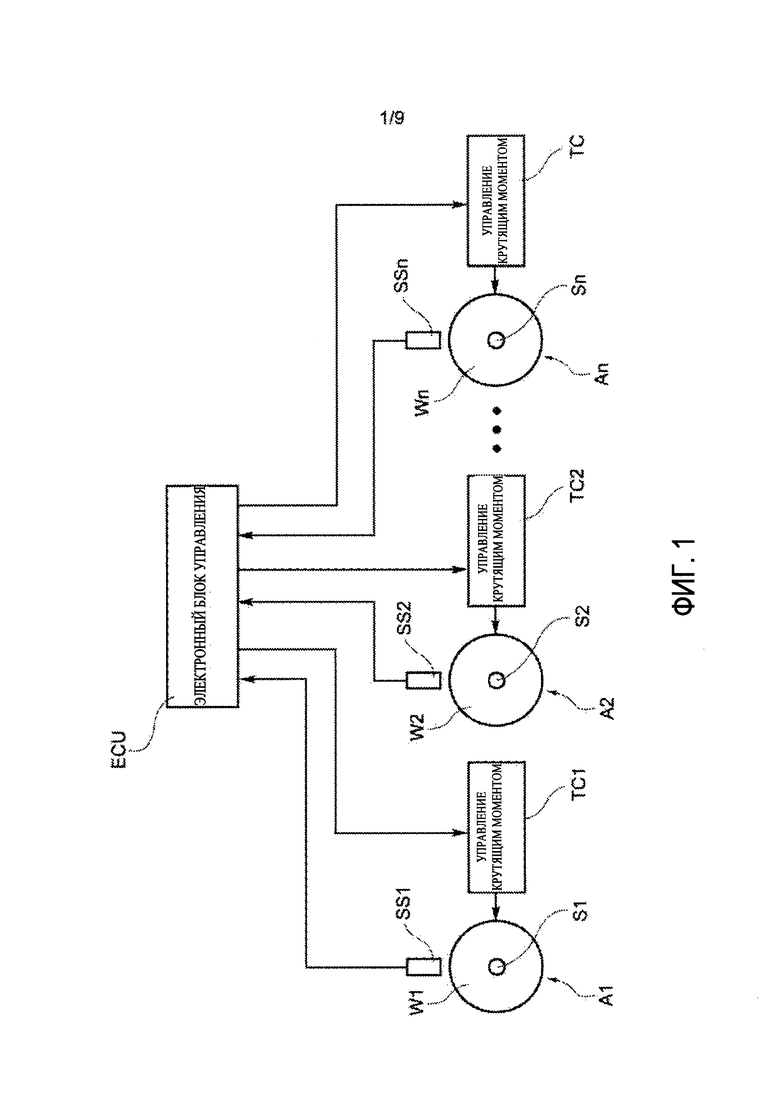
Система для управления сцеплением колес с противобоксовочной функцией, в соответствии с известным уровнем техники, схематически представлена на фигуре 1 прилагаемых чертежей, которая рассматривает транспортное средство с числом управляемых осей n: A1, А2, .., An. Оси A1, А2, …, An содержат соответственно валы S1, S2, …, Sn и соответствующие пары колес W1, W2, …, Wn, каждая из которых является неотъемлемой частью соответствующего вала в процессе вращения.
На чертежах, как правило, показано только одно колесо каждой оси.
WSP-система, показанная на фигуре 1, содержит электронный блок управления (ЭБУ), включающий в себя микропроцессорную архитектуру, который получает от тахометров сигналы с информацией об угловой скорости каждой из осей A1, А2, … An, регистрируемой датчиками SS1, SS2, …, SSn, подключенными к каждой из осей соответственно. Электронный блок управления (ЭБУ) также соединен с приборами регулирования крутящего момента TC1, ТС2, …, TCn, каждый из которых подключен к соответствующей оси A1, А2, …, An.
Электронный блок управления (ЭБУ) предназначен для управления изменением крутящего момента, приложенного к каждой оси, в соответствии с заданным алгоритмом, если, в случае применения крутящего момента на стадии разгона или на стадии торможения при ухудшении сцепления, колеса одной или нескольких осей оказываются на грани начального условия скольжения. Регулирование крутящего момента осуществляется таким образом, чтобы предотвратить полную блокировку осей и, если это возможно, то таким образом, чтобы привести каждую ось в состояние контролируемого проскальзывания с расчетом на восстановление сцепления, но в любом случае в течение всей ситуации ухудшения сцепления.
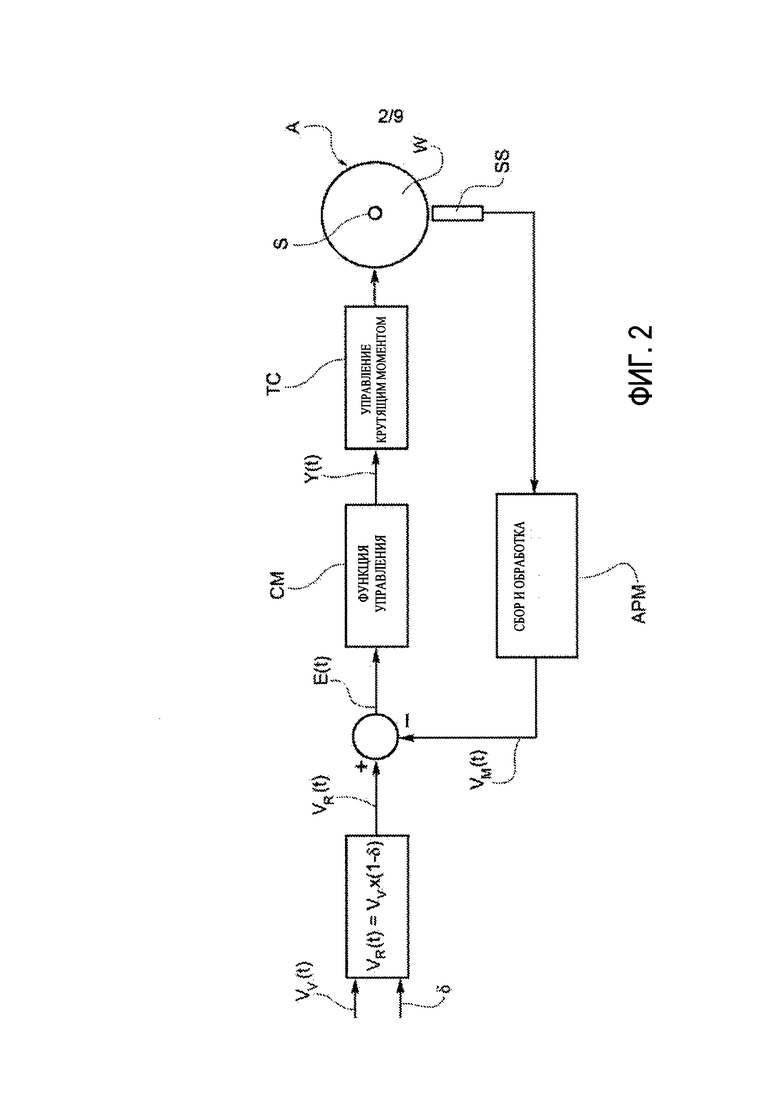
На фигуре 2 представлена блок-схема, иллюстрирующая систему управления сцеплением/восстановления сцепления для оси рассматриваемого типа транспортных средств: погрешность или разница E(t) между расчетным значением скорости VR(t), при котором начинает происходить боксование колес управляемой оси А, и измеренным значением скорости VM(t), зарегистрированным соответствующим датчиком SS и прошедшим обработку в модуле АРМ сбора и обработки данных, выступает в качестве входного сигнала для модуля СМ управления, выходные данные которого представляют собой управляющий сигнал Y(t) для устройства (ТС) управления крутящим моментом, связанного с осью А.
Расчетная скорость VR(t) определяется как составляющая мгновенной скорости транспортного средства, например, с использованием выражения:

где Vv(t) - мгновенное (измеренное) значение скорости, δ - относительное проскальзывание оси А, которое должно быть получено на фазе проскальзывания.
Как будет еще более понятно из дальнейшего описания, динамическая оптимизация относительного проскальзывания δ представляет собой одну из основных задач настоящего изобретения.
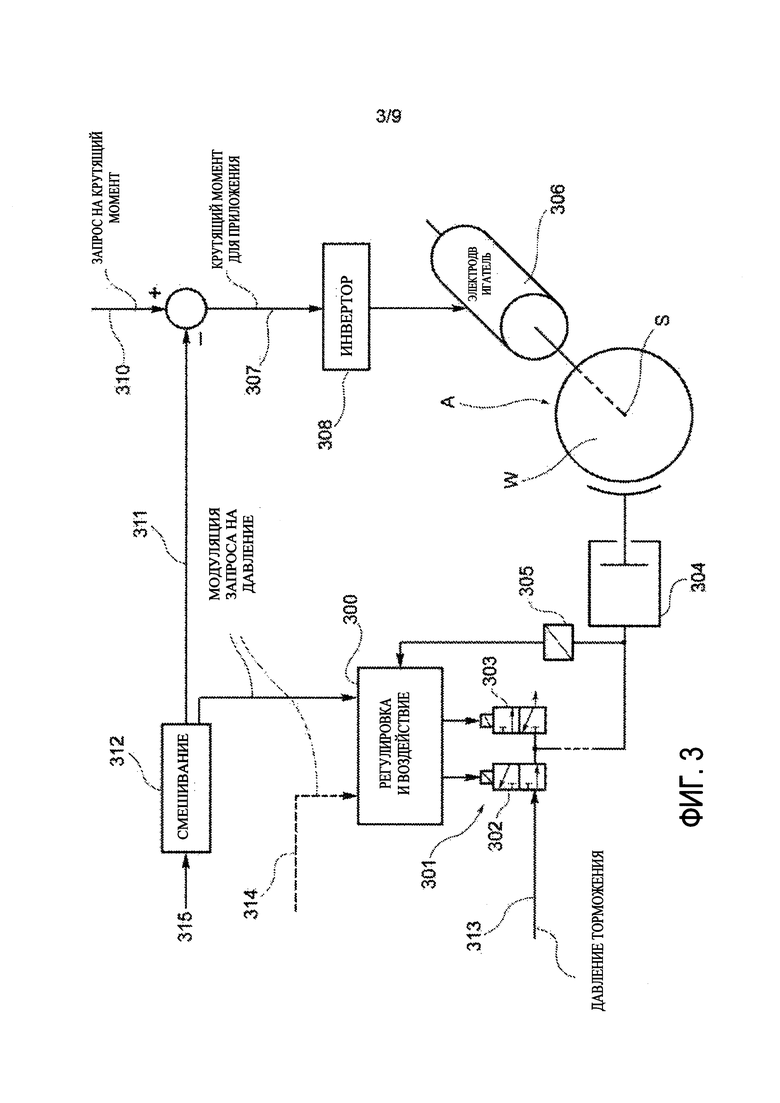
Фигура 3 иллюстрирует, как неограничивающий пример, возможную реализацию исполнения устройства ТС управления крутящим моментом. Такое устройство содержит электронный блок 300 регулировки и передачи воздействия, который управляет блоком электромагнитного клапана 301, включающим в себя загрузочный электромагнитный клапан 302 и разгрузочный электромагнитный клапан 303. В иллюстрируемом варианте осуществления изобретения эти электромагнитные клапаны представляют собой трехходовые клапаны с двумя положениями. Электромагнитный клапан 302 стандартно открыт, а электромагнитный клапан 303 стандартно закрыт.
Выход загрузочного электромагнитного клапана 302 известным способом соединен с тормозным цилиндром 304, связанным с осью А.
Под управлением электронного блока 300 клапанный блок 301 позволяет избирательно уменьшать, поддерживать или увеличивать подаваемое в тормозной цилиндр 304 командное давление, значения которого содержатся в пределах между атмосферным давлением и тормозным давлением, поступающим из трубопровода 313, подключенного к загрузочному электромагнитному клапану 302. Блок 300 может быть настроен так, чтобы контролировать давление в тормозном цилиндре 304 при разомкнутом контуре, при этом замыкание контура управления делегируется, согласно фигуре 2, контуру регулирования скорости, или же управление упомянутым давлением при замкнутом контуре происходит посредством обратной связи и достигается за счет использования датчика давления 305.
Электродвигатель 306 связан с осью А и способен приложить к такой оси крутящий момент для разгона или торможения, в соответствии с запросом 307 на крутящий момент, поданным на инвертор 308, который приводит в действие упомянутый электродвигатель. Крутящий момент, который должен быть приложен к оси А посредством использования двигателя 306, соответствует запросу 310 на крутящий момент, измененному согласно поправке 311 крутящего момента, значение которой находится в пределах между нулем и значением крутящего момента 310. Значение крутящего момента 307 положительно в случае разгона и отрицательно в случае торможения.
Смешивающий модуль 312, в случае проскальзывания во время торможения, «смешивает» запрос на модуляцию крутящего момента, применяемого к оси А между пневматической системой и регенеративной электродинамической системой, в соответствии с заданным алгоритмом.
Аппаратура регулирования крутящего момента, показанная на фигуре 3, может быть реализована в соответствии со многими вариантами, с которыми знакомы специалисты в данной области техники. Например, в случае железнодорожных транспортных средств, ведомых локомотивом, или тех, которые удовлетворяют нормативам МСЖД, в которых обычно системы противоскольжения пневматического типа полностью изолированы от тяговых систем, блок 300 не приводится в действие смешивающим модулем 312 через запрос 313 модуляции, как показано на фигуре 3, а скорее непосредственно модулем СМ управления, показанным на фигуре 2, через запрос 314 на модуляцию крутящего момента, проиллюстрированный на фигуре 3 пунктирной линией.
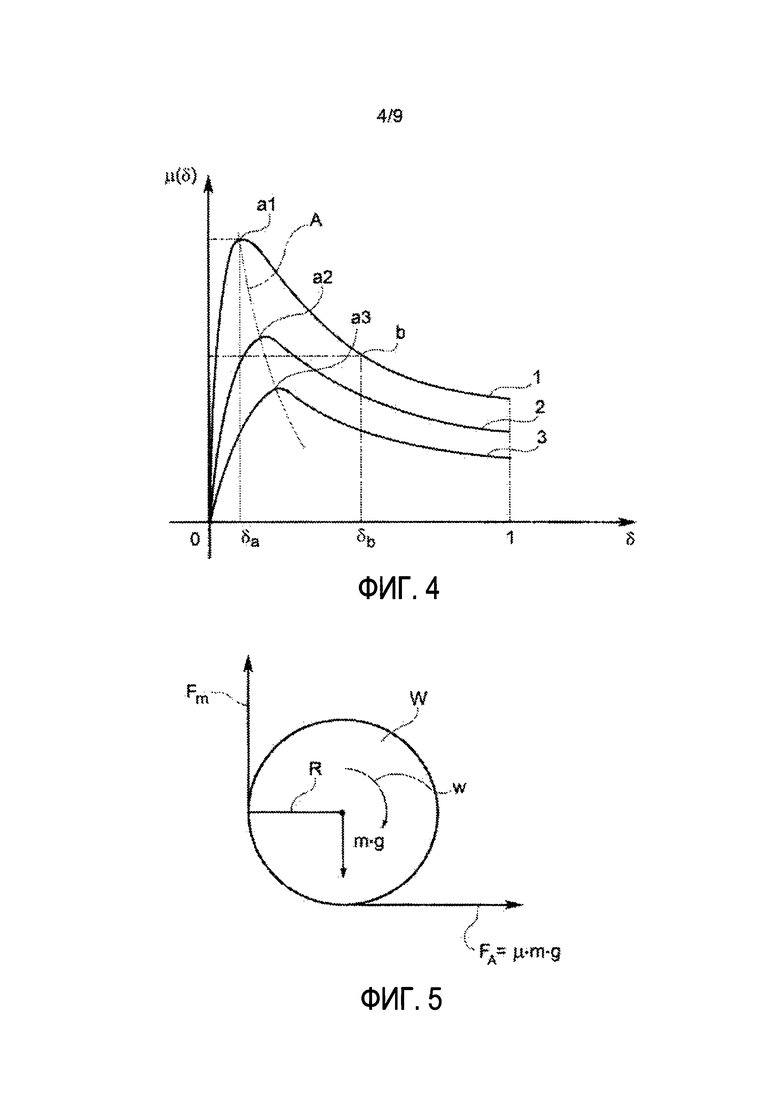
Коэффициент сцепления μ(δ) между колесами и рельсами изменяется в зависимости от проскальзывания δ по существу таким образом, как показано на фигуре 4. На основании упомянутого выражения (1), δ может быть выражено как
при 0≤Vr≤Vv и 0≤δ≤1.
На фигуре 4 кривые 1, 2 и 3 показывают качественную тенденцию изменения сцепления в соответствии с условиями окружающей среды: кривая 1 соответствует состоянию сцепления в условиях сухого контакта между колесами и рельсами, кривая 2 соответствует состоянию сцепления при наличии влаги между колесами и рельсами, а кривая 3 представляет собой состояние сцепления при наличии вязкого материала между колесами и рельсами, такого как масло или гнилые листья (типичная ситуация в осенний период), или даже ржавчина, смешанная с влагой (типичная ситуация в железнодорожных депо).
Экспериментально установлено, что значения δ на пиках сцепления a1, а2, а3 изменяются при изменении условий сцепления, двигаясь вдоль кривой, как показано при помощи А на фигуре 4.
Схематичное изображение на фигуре 5 иллюстрирует силы, действующие на колесо оси А. Из этой фигуры становится очевидным, что:

где:
поэтому:

где Fm - тангенциальное усилие, прилагаемое к колесу средствами системы тяги и/или торможения, R - радиус колеса, J - момент инерции оси, m - масса, приложенная в точке контакта колесо-рельс,  - мгновенное значение углового ускорения оси.
- мгновенное значение углового ускорения оси.
Очевидно, что при одном и том же мгновенном значении углового ускорения максимальное прилагаемое усилие Fm достигается в соответствии с максимальным значением сцепления μ, то есть в точках, лежащих на кривой А, которая изображена на фигуре 4.
Если колесо начинает проскальзывать на оси в условиях, соответствующих, например, точке b на фигуре 4, то значение доступной силы Fm уменьшается в результате уменьшения величины сцепления μ, но возникает явление инжекции энергии в точке контакта колесо-рельс пропорционально проскальзыванию (разности) между скоростью транспортного средства Vv и тангенциальной скоростью Vr колеса с мощностью (закачиваемая энергия за единицу времени):

Упомянутое выражение (5) показывает, как при увеличении δ происходит увеличение мощности, приложенной к точке контакта колеса с рельсом. Такое закачивание энергии вызывает перегрев колеса с последующим эффектом очистки точки контакта, улучшая мгновенное значение сцепления μ для следующего колеса.
Также известно, что в случае влажности или дождя достигается значительный эффект очистки, тогда как при наличии смазочных материалов или гнилых листьев эффект очистки менее выражен.
Известные системы для восстановления сцепления между колесами и рельсами устанавливают фиксированное значение скольжения 5, обычно от 0,2 до 0,3, конкретное значение калибруется определенным образом окончательно во время испытаний для одобрения транспортного средства. Следовательно выбранное значение 5 оказывается оптимальным для типа смазочного материала, используемого для того, чтобы спровоцировать состояние боксования во время испытаний, как предписано, например, стандартом EN 15595,:2009+А1, Железнодорожный транспорт - Торможение - Пневмоюзовая защита колес, параграф 6.4.2.1. Следовательно оно не является оптимальным для всех типов материалов, которые могут стать причиной появления условия проскальзывания при обычной эксплуатации транспортного средства.
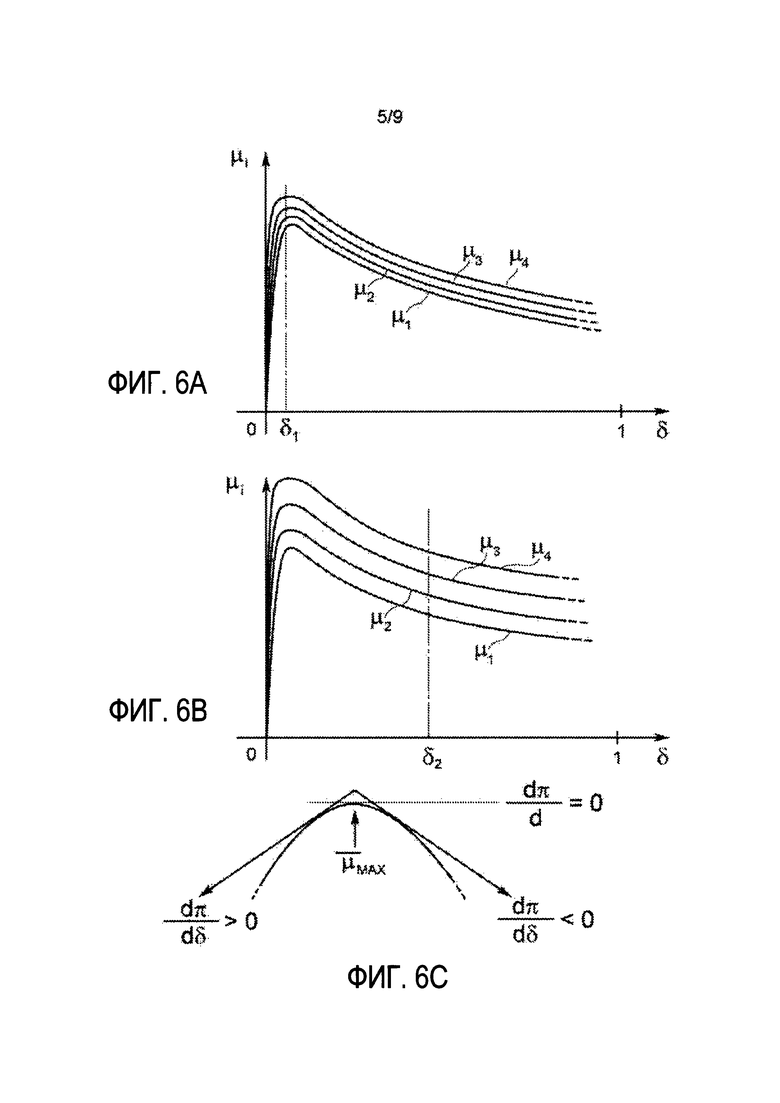
График на фигуре 6А показывает качественную зависимость изменения глобального пика сцепления транспортного средства с четырьмя осями от изменения δ: если все оси приведены в состояние проскальзывания при значении сцепления δ1, то, как видно из фигуры 6А, фактор очистки практически не имеет места быть, и, следовательно, четыре кривые значений сцепления, соответствующие четырем колесам, по существу совпадают друг с другом, и каждая ось получает максимальное пиковое значение сцепления μ(δ1).
Если вместо этого оси приведены в состояние проскальзывания, соответствующее значению сцепления δ2, как на фигуре 6В, то фактор очистки будет достаточно велик: только кривая μ1, соответствующая первой оси транспортного средства (считая по ходу движения), останется прежней и будет эквивалентна приведенной на фигуре 6А, а кривые, соответствующие сцеплению последующих осей будут соответствовать более высоким значениям сцепления в силу эффекта очистки, достигаемого за счет предыдущей оси. Значение μ(δ2) для каждой оси действительно ниже соответствующего значения μ(δ1).
На фигуре 6С представлена качественная картина существования пикового значения среднего глобального сцепления  в диапазоне δ1≤δ<δ2.
в диапазоне δ1≤δ<δ2.
Описанное выше распространяется, как следствие, на транспортное средство или ж/д состав с n осями.
Поскольку кривые, иллюстрирующие сцепление μ в соответствии с функцией проскальзывания δ, не могут быть сформулированы математически в виде аналитических выражений и непрерывно изменяются в зависимости от условий, вызывающих боксование, геометрии точки контакта и внешних условий окружающей среды, невозможно априори аналитически вычислить значение δ оптимального проскальзывания.
Однако, любая превосходная система управления сцеплением и, при возможности, его восстановления должна иметь функцию мгновенного анализа состояний сцепления в условиях реального времени и определять тенденцию соответственно изменению значения δ и определять значение δ так, чтобы максимизировать  Это такое значение, которое обеспечивает максимальное восстановление сцепления при боксовании, то есть значение, которое минимизирует тормозной путь в случае торможения в условиях ухудшающегося сцепления.
Это такое значение, которое обеспечивает максимальное восстановление сцепления при боксовании, то есть значение, которое минимизирует тормозной путь в случае торможения в условиях ухудшающегося сцепления.
Для устранения упомянутых выше проблем в документе ЕР 2147840 А описан способ адаптивного управления, осуществляемый в дискретном режиме времени, с последовательными этапами и на основе статического контроля значений тормозного давления, первоначально полученных для величины δ, равной 0,7, а затем в заданные интервалы времени, например 5 секунд. Значение 8 затем выбирается из трех возможных заранее заданных значений, и далее δ поддерживается постоянно равным этому новому значению в течение другого заданного интервала времени, например, 10 секунд.
По окончании суммарного периода 15 секунд, 8 возвращается к первоначальному значению (0,7) и начинается новый цикл «мониторинг-принятие решения». Способ, описанный в этом документе, относительно прост и упрощает вычислительные требования к системе. Однако это вызывает скачки в скорости проскальзывания, соответствующие скачкам 8, которые могут вызвать мгновенные перепады в ускорении и высокий расход сжатого воздуха.
Также этот метод позволяет идентифицировать изменения 8 при боксовании в дискретном режиме с течением времени с периодом, равным 15 секундам. Можно установить и более короткие периоды, но только за счет дополнительного увеличения расхода сжатого воздуха и более частых перепадов в мгновенном ускорении. Также постоянное повторение процесса может оказаться бесполезным, если во время боксования условия окружающей среды существенно не изменяются.
В документе WO 2006/113954 А описано управление проскальзыванием для железнодорожных транспортных средств, осуществляемое непрерывно в течение времени, что требует идентификации, при оптимальных условиях сцепления, параметров, необходимых далее для получения последующих желаемых характеристик в условиях реального боксования. Этот способ также дополнительно требует, чтобы было известно глобальное замедление системы.
Также процесс регулировки оптимальных значений проскальзывания требует значительных временных затрат. Поскольку этот процесс регулировки осуществляется в начале фазы боксования, т.е. когда транспортное средство движется на высокой скорости, пространство, покрываемое последним, значительно увеличивается.
Одна из задач настоящего изобретения - предложить улучшенный способ управления и возможного восстановления сцепления колес управляемой оси железнодорожного транспортного средства.
Эта и другие задачи решаются настоящим изобретением при помощи способа управления и возможного восстановления сцепления колес по меньшей мере двух управляемых осей железнодорожного транспортного средства, содержащего следующие операции:
формирование сигналов скорости, показывающих угловую скорость колес упомянутых, по меньшей мере двух управляемых осей;
оценивание величины мгновенного сцепления в точке контакта между колесами упомянутых, по меньшей мере двух, управляемых осей и рельсами с помощью следящего за сцеплением устройства;
формирование целевого значения проскальзывания колес упомянутых, по меньшей мере двух, управляемых осей, задаваемое с помощью заранее определенного алгоритма, обрабатывающего расчетные значения сцепления, и постоянно изменяющего упомянутое целевое значение проскальзывания с заданной длительностью периода выборки, с тем чтобы максимизировать среднее значение сцепления колес транспортного средства.
Дополнительные признаки и преимущества изобретения станут очевидными из последующего подробного описания, предоставляемого исключительно в качестве неограничивающего примера со ссылкой на следующие прилагаемые чертежи:
- На фигуре 1 представлена блок-схема противобоксовочной системы управления колес железнодорожного транспортного средства;
- На фигуре 2 представлена блок-схема замкнутой системы управления скоростью вращения оси;
- На фигуре 3 представлена возможная реализация устройства для управления крутящим моментом, приложенным к оси;
- На фигуре 4 показан график, качественно отображающий тенденцию изменения коэффициента сцепления μ колес оси (ось у) в зависимости от проскальзывания δ (ось х);
- На фигуре 5 представлена диаграмма, иллюстрирующая силы, действующие на колесо оси;
- На фигурах 6А, 6В представлены графики, качественно отображающие тенденцию изменения коэффициента сцепления μ колес четырех осей транспортного средства для двух различных эксплуатационных условий;
- Фигура 6С иллюстрирует тенденцию кривой среднего сцепления  в области пикового значения;
в области пикового значения;
- На фигуре 7 представлена блок-схема системы для реализации способа в соответствии с настоящим изобретением;
- На фигурах 8 и 9 представлены блок-схемы систем для двух других вариантов осуществления изобретения - систем непрерывного отслеживания среднего сцепления при пиковом значении;
- На фигуре 10 представлена блок-схема другой системы для реализации процесса или способа в соответствии с настоящим изобретением;
- На фигуре 11 представлен график передаточной функции с гистерезисом, используемой при реализации способа в соответствии с изобретением; и
- На фигуре 12 представлена блок-схема варианта осуществления системы для осуществления способа в соответствии с настоящим изобретением;
Из нижеследующего станет ясно, что способ в соответствии с настоящим изобретением позволяет определить оптимальное значение проскальзывания δ(t), которое позволяет максимизировать величину сцепления, полученную в виде среднего значения мгновенных показателей сцепления для всех осей, и это среднее значение определяется следующим образом:

Способ в соответствии с настоящим изобретением начинает работать в начале фазы боксования и исправляет упомянутое оптимальное значение δ(t) в режиме реального времени и непрерывно с течением времени, адаптируя его к возможным изменениям значений μi(δ,t) (сцепления i контролируемых осей), которые могут влиять на процесс боксования таким образом, чтобы поддерживать среднее значение  при всех обстоятельствах на максимальном уровне.
при всех обстоятельствах на максимальном уровне.
Способ в соответствии с настоящим изобретением предполагает использование следящего за сцеплением устройства, предназначенного для оценки в режиме реального времени значения μ в точке контакта колес и рельсов для одной или нескольких осей при боксовании и, путем обработки в режиме реального времени этих значений μ, определять в непрерывном режиме оптимальные значения δ, которые затем передаются в систему управления проскальзыванием для получения наибольшего восстановления глобального сцепления.
Следящее за сцеплением устройство, приспособлено для динамического определения мгновенного значения μ(Tj) сцепления в течение типичного периода выборки значений Tj заданной длительности Т в точке контакта колесо-рельс, в то время как боксование определяется с помощью упомянутых уравнений, из которых, с помощью некоторых простых шагов, получается следующая зависимость:

где
 угловое ускорение оси, то есть производная по времени угловой скорости со оси; значение этого ускорения уже известно в режиме реального времени в рамках системы управления сцеплением и восстановления сцепления, так как угловое ускорение является одной из переменных, на которых обычно основана работа функции управления, реализуемая при помощи блока СМ, показанного на фигуре 2, для достижения управляемого проскальзывания оси; знак определяется происходящим в конкретный момент времени процессом: ускорение или замедление оси;
угловое ускорение оси, то есть производная по времени угловой скорости со оси; значение этого ускорения уже известно в режиме реального времени в рамках системы управления сцеплением и восстановления сцепления, так как угловое ускорение является одной из переменных, на которых обычно основана работа функции управления, реализуемая при помощи блока СМ, показанного на фигуре 2, для достижения управляемого проскальзывания оси; знак определяется происходящим в конкретный момент времени процессом: ускорение или замедление оси;
m - масса, действующая на точку контакта колес-рельс; в поездах самого последнего поколения значение m известно в режиме реального времени, так как эти сведения обычно имеются в распоряжении системы, выполняющей расчет усилия ускорения/торможения, прилагаемого к оси для достижения требуемого ускорения или торможения;
J - момент инерции оси, то есть параметр, значение которого всегда известно и оно указывается производителем вагонов в соответствующей документации, так как представляет собой один из самых главных параметров для расчета тормозного пути;
Fm, уже определенное выше в связи с фигурой 5, может быть получено путем умножения давления, приложенного к тормозному цилиндру, известному тормозной системе, на коэффициенты преобразования давления/силы, характерные для тормозного цилиндра, а также коэффициенты передачи и КПД рычагов и коэффициента трения между тормозными накладками и дисками (в случае дисковых тормозов); в случае электродинамического типа тяги или торможения, значение силы Fm может быть получено из значения электрического тока, подаваемого/регенериуемого электродвигателем при тяге или, соответственно, при торможении; а в случае так называемого «смешанного» торможения, интенсивность силы Fm может быть определена как сумма соответствующих составляющих от пневматического тормоза и электродинамического тормоза, взвешенных с учетом необходимых коэффициентов; и
Tj - обобщенное j-oe значение для длительности периода выборки значений в системе, в течение которого следящее за сцеплением устройство, а в более общем плане - способ в соответствии с настоящим изобретением, проводит выборку; в нижеследующем описании Tj заменит использование переменной t, представляющей время.
После следящего за сцеплением устройства в схеме может быть предусмотрен фильтр низкочастотного типа для удаления или, по меньшей мере, смягчения мгновенных изменений и шума, присутствующих за пределами частотной полосы, представляющей интерес для корректного отслеживания значений сцепления.
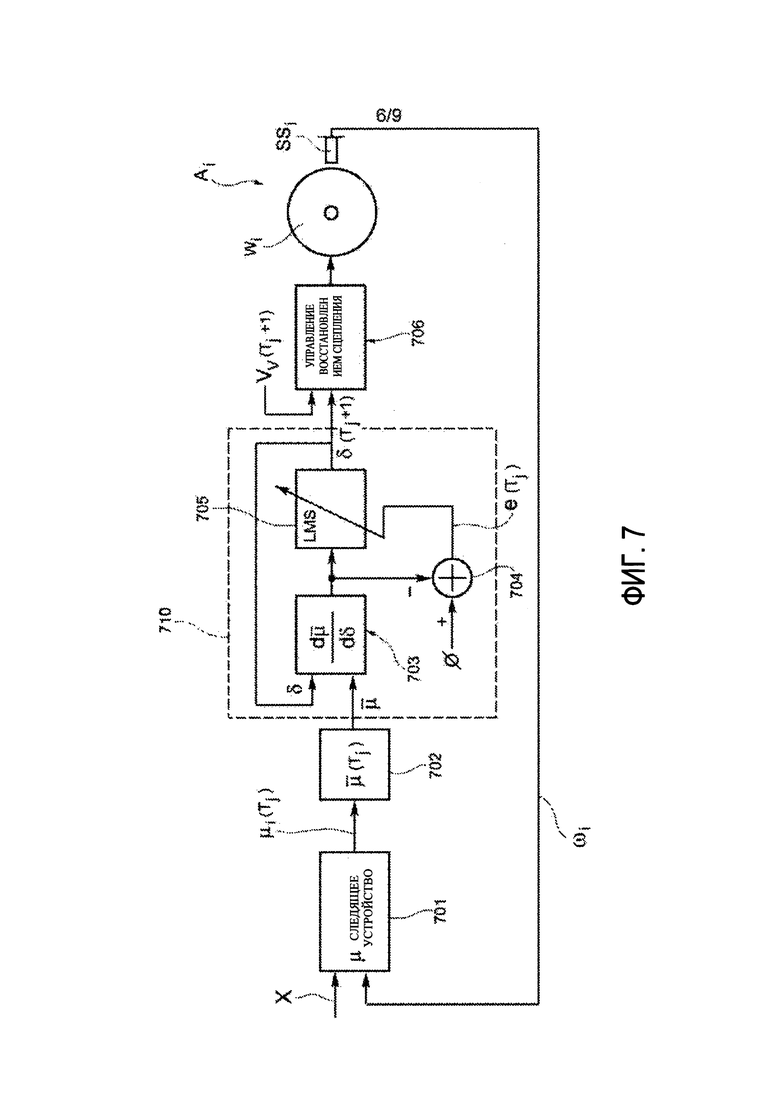
Первый вариант осуществления системы для осуществления способа в соответствии с настоящим изобретением проиллюстрирован на фигуре 7.
Данный способ предусматривает определение и отслеживание значения проскальзывания δ таким образом, чтобы кривая  изображенная на фигуре 6С, отображала максимальное значение, то есть значение δ, для которого
изображенная на фигуре 6С, отображала максимальное значение, то есть значение δ, для которого 
С этой целью может использоваться система, основу работы которой составляет алгоритм МСО (минимальной среднеквадратичной ошибки). Для точного описания основных признаков критерия сходимости и вариантов реализации алгоритмов МСО, см. соответствующие научные публикации и, в частности, книгу: Бернарда Уидроу и Самьюэля Д Стирнз, «Адаптивная обработка сигналов», Нью-Джерси, Prentice-Hall, Inc., 1985.
Со ссылкой на фигуру 7, следящее за сцеплением устройство 701 получает входные сигналы, представляющие значения скорости ω1, ω2, …, ωn колес управляемых осей A1, А2, …, An, в сочетании с вектором, содержащим значения величин mi(Tj), Ji, Ri и Fmi(Tj), описание которых дано выше, для проведения оценки мгновенных значений сцепления uj(Tj), соответствующих осям Ai (при i=1, 2, …, n).
Выход следящего за сцеплением устройства 701 подсоединен ко входу в модуль 702, который вычисляет, на основе проведенных оценок мгновенных значений сцепления μi(Tj), среднее значение 
Последующий модуль 703 дифференцирования вычисляет значение  например, по уравнению:
например, по уравнению:
Сумматор 704 выдает на выходе ошибку e(Tj) как разность между желаемым значением (0) упомянутой производной и ее мгновенным значением, соответственно упомянутому уравнению (9). Ошибка e(Tj) используется для выполнения и адаптации алгоритма МСО, реализованного в блоке 705. Данный блок выдает на выходе целевое значение δ(Tj+i).
Значение δ(Tj+i) подается вместе с обновленным значением скорости W транспортного средства во множество блоков 706 управления восстановлением сцепления, по одному на каждую ось Ai, каждый из которых имеет, например, архитектуру, показанную на фигуре 2, описанной выше.
Модуль 705, реализующий алгоритм МСО, непрерывно производит поправку выходного сигнала, т.е. значения 6, с целью минимизации или исключения ошибки е(Т), т.е. вплоть до обнуления 
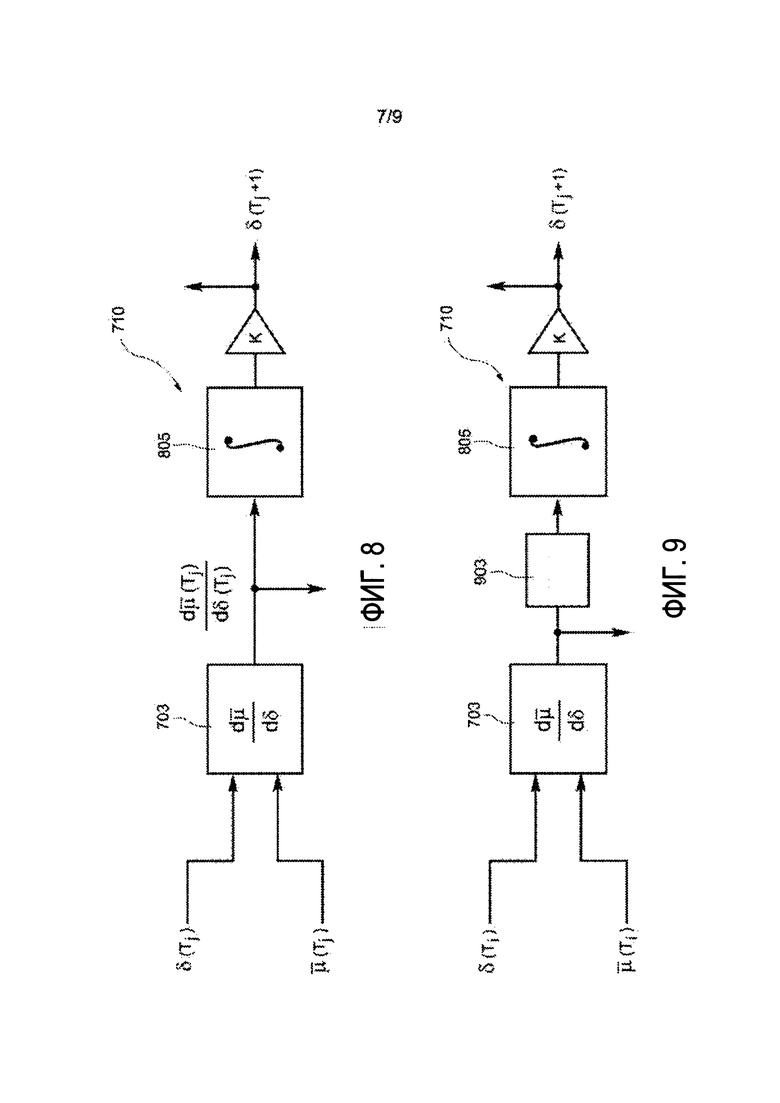
Упрощенный вариант исполнения группы модулей, включенных в блок 710, изображенный на фигуре 7 пунктирной линией, проиллюстрирован фигурой 8, на которой блок 705, реализующий алгоритм МСО, заменен простым интегратором 805, выходной сигнал которого, усиленный с учетом коэффициента К, формирует целевое значение проскальзывания δ(Tj+i), которое затем передается в систему 706 управления сцеплением и восстановления сцепления.
Коэффициент усиления К регулирует скорость идентификации среднего пикового значения сцепления  и одновременно обеспечивает стабильность работы замкнутой системы.
и одновременно обеспечивает стабильность работы замкнутой системы.
Дополнительный упрощенный вариант осуществления блока 710 изобретения, изображенного на фигуре 7 пунктирной линией, представлен на фигуре 9: модуль 903 определяет знак производной Выходной сигнал блока 903 равняется +1 или -1 (положительное или, соответственно, отрицательное направление), а установленный за блоком интегратор 805 осуществляет простое суммирование. Вместо интегратора 805 может использоваться суммирующий или вычитающий счетчик, обновление показаний которого происходит с периодичностью Т=Tj+1-Tj.
Схемы в соответствии с фигурами 8 и 9 осуществляют непрерывное отслеживание среднего значения пикового сцепления и также непрерывно адаптируются к изменению условий сцепления, что весьма схоже с тем, что было достигнуто при использовании схемы в соответствии с фигурой 7. Последняя обеспечивает быстрое и точное отслеживание условия  но требует использования определенного количества вычислений в режиме реального времени.
но требует использования определенного количества вычислений в режиме реального времени.
Применение схемы в соответствии с фигурой 9 позволяет значительно сократить количество необходимых вычислений, но также снижает скорость отслеживания условия 
Схема в соответствии с фигурой 8 представляет собой промежуточный вариант между схемами согласно фигурам 7 и 9.
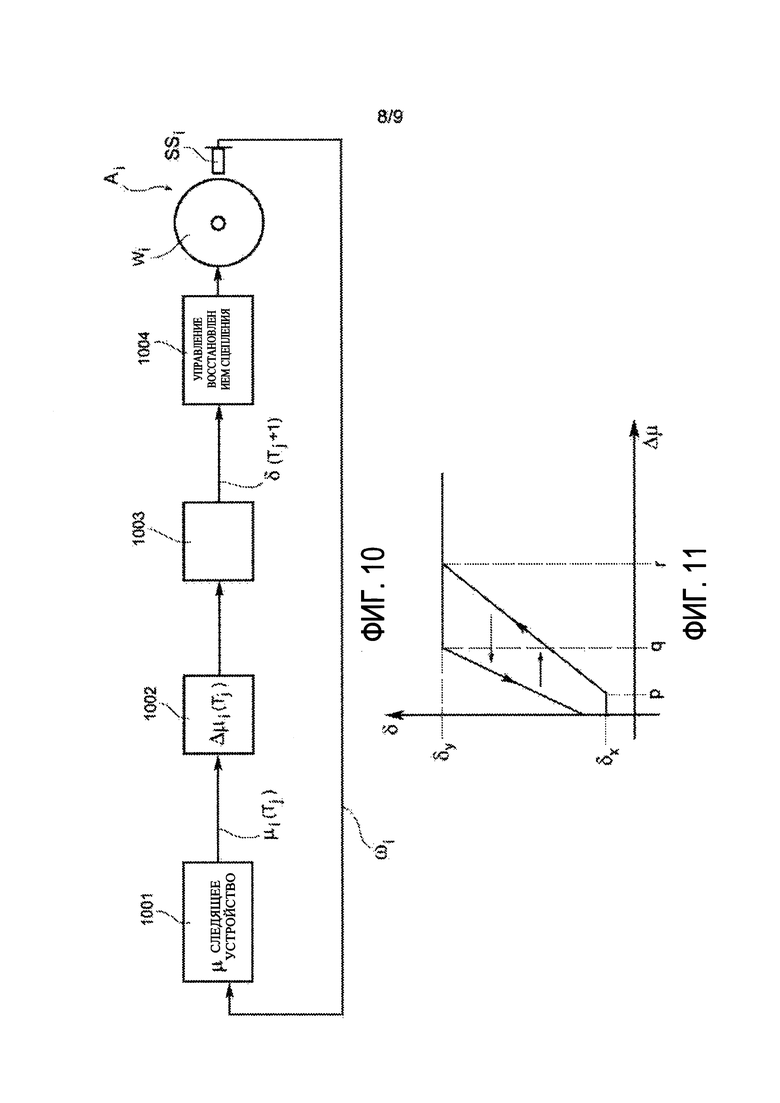
Фигура 10 иллюстрирует дополнительную систему для реализации способа в соответствии с настоящим изобретением, при этом разница между большим и меньшим значениями сцепления между управляемыми осями в обобщенном периоде Tj анализируется в режиме реального времени:

а значение δ(Tj+i) получается на основе кривой, полученной из экспериментальных данных, как это более подробно описано ниже.
Со ссылкой на фигуру 10, следящее за сцеплением устройство 1001, аналогичное следящему за сцеплением устройству 701 на фигуре 7, получает значения скоростей ωi колес Wi управляемых осей Ai в сочетании с вектором значений ранее описанных величин, необходимых для оценки соответствующих значений сцепления μi(Tj). Модуль 1002 получает от следящего за сцеплением устройства 1001 мгновенные значения сцепления μi(Tj) и выходные данные по значениям Δμ(Tj), в соответствии с уравнением (10), упомянутым ранее.
Последующий модуль 1003 получает в качестве входных данных значение Δμ(Tj) и выдает на выходе значение δ(Tj+1), которое затем передается в модуль 1004 управления сцеплением и восстановления сцепления, аналогичный модулю 706, показанному на фигуре 7 и имеющего, например, конфигурацию, показанную на фигуре 2.
В необходимых случаях, модуль 1003 может иметь передаточную функцию с гистерезисом в соответствии с графиком, показанном на фигуре 11: эта передаточная функция определяет зависимость между скольжением δ и изменением сцепления Δμ, график которой имеет по существу форму многоугольника, ограниченного снизу прямой горизонтальной линией, δ=δx при δx обычно (но не обязательно) равным 0,05 и ограниченного сверху горизонтальной прямой линии, δ=δy, при δy обычно (но не обязательно) равным 0,35. Передаточная функция таким образом может формировать значения δ в интервале между δx и δy.
Если модуль 1004 управления и восстановления сцепления должен полностью соответствовать нормативным требованиям (упомянутому выше EN 15595,:2009+А1), то значение δy должно соответствовать требованиям пункта 6.3.2.2 упомянутого стандарта.
Если во время фазы проскальзывания при заданном значении 8 наблюдается уменьшение сцепления Δμ, имеющее тенденцию привести к горизонтальной миграции рабочей точки через левую наклонную прямолинейную сторону вышеупомянутого многоугольника, то передаточная функция определит новое значение δ(Δμ), по направлению вниз вдоль этой наклонной прямолинейной стороны. Подобным же образом, если во время фазы боксования при заданном значении 8 наблюдается увеличение сцепления Δμ, имеющее тенденцию привести к горизонтальной миграции рабочей точки через правую наклонную сторону многоугольника, то передаточная функция определит новое значение δ(Δμ), по направлению вверх вдоль правой наклонной прямолинейной стороны вышеупомянутого многоугольника.
Гистерезис передаточной функции необходим, чтобы обеспечить стабильность системы, которая в противном случае будет иметь тенденцию колебаться из-за значительных задержек в контуре.
Наклонные прямолинейные стороны многоугольника сходятся между собой к низу, уменьшая гистерезис в окрестности начала координат осей, для того, чтобы сделать систему очень чувствительной к малым изменениям Δμ, когда система должна работать в условиях δ≈δx, как в ситуации, на которую ссылается график на фигуре 6А.
На фигуре 11 значения р, q, r, которые представляют х-координаты вершин вышеупомянутого многоугольника, определены экспериментальным путем и имеют, например, приблизительно значения р=0,01, q=0,03 и r=0,05.
Модуль 1003 вычисляет δ(Tj+1) с периодичностью Т (=Tj+1-Tj), обеспечивая корректировку значения δ во времени в зависимости от изменения условий окружающей среды.
Дополнительная реализация способа в соответствии с настоящим изобретением может быть обеспечена для формирования значения δ(Tj) за счет обработки в режиме реального времени значений  , Δμ(Tj) и δ(Tj) с помощью алгоритма нечеткой логики для формирования значения δ(Tj+1), которое затем будет передаваться в модуль 706 управления/восстановления сцепления, показанный на фигуре 7.
, Δμ(Tj) и δ(Tj) с помощью алгоритма нечеткой логики для формирования значения δ(Tj+1), которое затем будет передаваться в модуль 706 управления/восстановления сцепления, показанный на фигуре 7.
Каждый упомянутый выше вариант осуществления способа согласно изобретению описан для сил в фазе боксования, заставляющих все управляемые оси проскальзывать при значении, близком к δ. По сути, последняя (считая по ходу движения) из управляемых осей, которая до сих пор находится в состоянии боксования, не имея функцию очистки рельсов для любых последующих осей (поскольку она является последней из осей, или последующие оси находятся в состоянии полного сцепления) может удерживаться в состоянии контролируемого проскальзывания на пиковом значении сцепления, лежащем на кривой А, приведенной на фигуре 4, за счет дополнительного увеличения значения 
Такое решение просто не может быть осуществлено путем введения для рассматриваемой оси конкретного значения δ, соответствующего точкам кривой А, приведенной на фигуре 4, поскольку эта кривая априори неизвестна и непрерывно изменяется с течением времени.
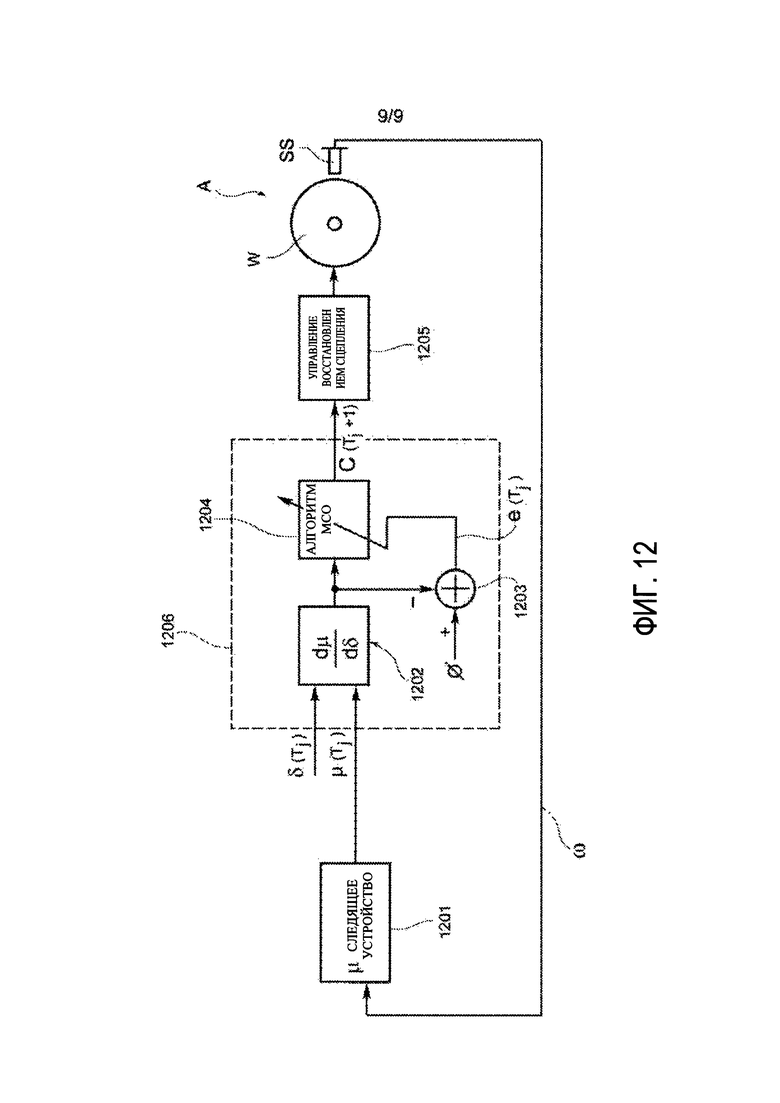
Для поддержания этой оси в состоянии контролируемого проскальзывания на пиковом значении сцепления, как показано на фигуре 12, следящее за сцеплением устройство 1201 получает сигналы, показывающие скорость W колеса этой управляемой оси, одновременно со значением вектора ранее описанных величин, необходимым для оценки мгновенного сцепления μ этой оси.
Последующий модуль 1202 вычисляет значение производной  при значении δ, получаемым в режиме реального времени в соответствии с уравнением (1«).
при значении δ, получаемым в режиме реального времени в соответствии с уравнением (1«).
Сумматор 1203 выдает на выходе ошибку e(Tj) как разность между желаемым значением упомянутой производной (т.е. значением 0) и ее мгновенным значением, вычисленным в модуле 1202. Данная ошибка используется для адаптации алгоритма МСО, реализованного в блоке 1204. Последний выдает на выходе запрос C(Tj+1) для упомянутой оси, который передается в модуль 1205 управления крутящим моментом, который имеет, например, архитектуру, описанную выше со ссылкой на фигуру 3.
Модуль 1204 известным способом, в непрерывном режиме осуществляет корректировку выходного сигнала C(Tj+1), чтобы свести к минимуму или нулю ошибку е(Т), то есть чтобы достичь обнуления вышеупомянутой производной для того, чтобы сцепление упомянутой оси достигло пикового значения и поддерживалось на этом уровне.
Блок 1206, обозначенный пунктиром на фигуре 12, возможно упростить, как это описано выше при упоминании фигуры 7, и соответствующие варианты упрощения проиллюстрированы фигурами 8 и 9.
Решение в соответствии с фигурой 12 позволяет измерять реальные значения максимально возможного сцепления для данной оси.
Применяя это решение к двум осям, например, первой оси в направлении движения и последней оси в состоянии боксования, и находя разницу между их сцеплениями, необходимое значение может быть получено как разница сцеплений Δμ в другом варианте осуществления изобретения, показанном на фигуре 10, взамен использования блоков 1001 и 1002, показанных здесь.
Решение в соответствии с фигурой 12 может также использоваться для определения направления движения транспортного средств: в начале фазы боксования решение в соответствии с фигурой 12 применяется, например, к первой и последней осям транспортного средства, а направление движения определяется соответственно оси, для которой значение сцепления оказалось более низким.
Наконец, решение в соответствии с фигурой 12 может быть использовано для улучшения оценки фактической скорости Vv транспортного средства: действительно, кривая А на фигуре 4 находится в области, которой соответствуют значения δ менее 0,02 на оси абсцисс. При торможении для оценки фактической скорости транспортного средства Vv чаще всего используется алгоритм, предполагающий применение функции следующего типа:

тогда как при разгоне применяется следующая функция:

где amax - максимально ускорение, разрешенное при эксплуатации транспортного средства, значение указывается со знаком «+» в случае разгона, и со знаком «-» в условиях торможения.
Следовательно, применяя решение согласно фигуре 12 в отношении, по меньшей мере, одной оси, будем иметь ситуацию, при которой упомянутая ось всегда будет двигаться с линейной скоростью, равной скорости транспортного средства (с максимальной погрешностью вычислений не более 2%), даже в условиях ухудшающегося сцепления. Следовательно две упомянутых формулы всегда позволяют получить очень надежное значения скорости Vv транспортного средства, даже при значительном ухудшении условий сцепления.
Разумеется, не изменяя принцип настоящего изобретения, варианты осуществления изобретения и детали реализации могут значительно отличаться от таковых, описанных и изображенных исключительно в виде неограничивающего примера, не выходя при этом за пределы объема изобретения, определяемого в прилагаемой формуле изобретения.
Предложен способ управления сцеплением и восстановления сцепления колес управляемых осей железнодорожного транспортного средства в течение фазы боксования. Формируют сигналы скорости, показывающих угловую скорость упомянутых колес. Оценивают величины мгновенного сцепления в точке контакта между упомянутыми колесами и рельсами с помощью следящего за сцеплением устройства (701). Формируют целевые значения проскальзывания колес упомянутых осей посредством алгоритма оптимизации, обрабатывающего расчетные значения и постоянно изменяющего упомянутое целевое значение проскальзывания с заданной длительностью периода выборки (Т), с тем чтобы максимизировать среднее значение сцепления колес транспортного средства. Достигается повышение сцепления и уменьшение проскальзывания колес управляемых осей железнодорожного транспортного средства. 11 з.п. ф-лы, 14 ил.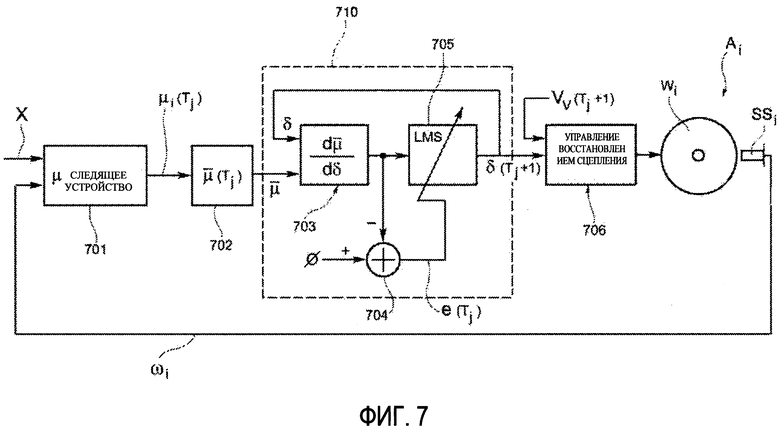
1. Способ управления сцеплением и восстановления сцепления колес (Wi) по меньшей мере двух управляемых осей (Ai) железнодорожного транспортного средства в течение фазы буксования, содержащий следующие шаги:
формирование сигналов скорости, показывающих угловую скорость (ωi) упомянутых колес (Wi);
оценивание величины мгновенного сцепления (μ(Tj)) в точке контакта между упомянутыми колесами (Wi) и рельсами с помощью следящего за сцеплением устройства (701; 1001; 1201);
формирование целевого значения проскальзывания (δ) колес (Wi) по меньшей мере двух упомянутых осей (Ai) посредством алгоритма оптимизации, обрабатывающего расчетные значения (μi(Tj)), и постоянно изменяющего упомянутое целевое значение проскальзывания с заданной длительностью периода выборки (Т), с тем чтобы максимизировать среднее значение сцепления колес транспортного средства.
2. Способ по п. 1, в котором вычисляется производная  от среднего значения
от среднего значения  сцепления колес (Wi) упомянутых осей (Ai) как функции изменения целевого проскальзывания (δ) упомянутых колес (Wi) и, через адаптивный фильтр (705), значение целевого проскальзывания (δ) изменяется для последующего периода выборки (Tj+1) таким образом, чтобы упомянутая производная
сцепления колес (Wi) упомянутых осей (Ai) как функции изменения целевого проскальзывания (δ) упомянутых колес (Wi) и, через адаптивный фильтр (705), значение целевого проскальзывания (δ) изменяется для последующего периода выборки (Tj+1) таким образом, чтобы упомянутая производная  стремилась к нулю, т.е. таким образом, чтобы максимизировать среднее значение сцепления колес (Wi) упомянутых осей (Ai).
стремилась к нулю, т.е. таким образом, чтобы максимизировать среднее значение сцепления колес (Wi) упомянутых осей (Ai).
3. Способ по п. 1, в котором упомянутая производная  вычисляется и далее интегрируется при помощи интегратора (801), выход из которого изменяет значение целевого проскальзывания (δ) и становится стабильным когда упомянутая производная стремится к нулю, т.е. когда среднее значение сцепления
вычисляется и далее интегрируется при помощи интегратора (801), выход из которого изменяет значение целевого проскальзывания (δ) и становится стабильным когда упомянутая производная стремится к нулю, т.е. когда среднее значение сцепления  упомянутых осей (Ai) стремится к максимальному значению.
упомянутых осей (Ai) стремится к максимальному значению.
4. Способ по п. 1, в котором знак упомянутой производной  вычисляется и далее интегрируется при помощи интегратора (801; 906), выход из которого изменяет значение целевого проскальзывания (δ) и становится стабильным когда упомянутая производная равна нулю, т.е. когда среднее значение сцепления
вычисляется и далее интегрируется при помощи интегратора (801; 906), выход из которого изменяет значение целевого проскальзывания (δ) и становится стабильным когда упомянутая производная равна нулю, т.е. когда среднее значение сцепления  упомянутых осей (Ai) достигает своего максимального значения.
упомянутых осей (Ai) достигает своего максимального значения.
5. Способ по п. 1, в котором вычисляется значение разности между максимальным сцеплением (μmax(Tj)) и минимальным сцеплением (μmin(Tj)) колес (Wi) упомянутых управляемых осей (Ai) и, с использованием предопределенной функции с гистерезисом, которая связывает целевое проскальзывание (δ) со сцеплением (μ), значение целевого проскальзывания (δ) изменяется и стабилизируется в области максимального значения среднего сцепления
6. Способ по п. 1, в котором вычисляются среднее значение сцепления , максимальное изменение сцепления (μmax-μmin) и целевое проскальзывание (δ(Tj)) и с использованием устройств нечеткой логики формируется последующее значение целевого проскальзывания δ(Tj+i), которое должно поступить на вход модуля (706; 1004; 1205) восстановления сцепления.
7. Способ по одному из пп. 1-6, в котором последняя по отношению к направлению движения ось при ее боксовании поддерживается в состоянии управляемого проскальзывания при пиковом значении доступного сцепления.
8. Способ по п. 1, в котором скорость транспортного средства (Vv) рассчитывается с помощью мгновенной скорости по меньшей мере одной оси в состоянии буксования, при этом упомянутая ось удерживается в состоянии управляемого проскальзывания при пиковом значении доступного сцепления.
9. Способ по п. 1, в котором по меньшей мере две оси в состоянии буксования поддерживаются в состоянии управляемого проскальзывания при пиковом значении доступного сцепления для определения направления движения транспортного средства.
10. Способ по п. 7, в котором, чтобы поддерживать ось в состоянии управляемого проскальзывания при пиковом значении доступного сцепления, используется алгоритм управления для упомянутой оси, в котором на основе значения сцепления (μ) для этой оси вычисляется производная  от сцепления (μ) как функции проскальзывания (δ), и, через адаптивный фильтр (1204), крутящий момент (С), который надо передать в систему (1205) для управления крутящим моментом, приложенным к оси, изменяется таким образом, чтобы сохранять упомянутую производную близкой к нулю.
от сцепления (μ) как функции проскальзывания (δ), и, через адаптивный фильтр (1204), крутящий момент (С), который надо передать в систему (1205) для управления крутящим моментом, приложенным к оси, изменяется таким образом, чтобы сохранять упомянутую производную близкой к нулю.
11. Способ по п. 7, в котором, для того чтобы поддерживать упомянутые оси в состоянии буксования при пиковом значении сцепления, используется алгоритм управления для каждой оси, при этом знак производной  сцепления (μ), как функции проскальзывания (δ), вычисляется и затем интегрируется с помощью интегратора, выход которого изменяет значение крутящего момента (С), которое должно быть передано в систему (1205) для управления крутящим моментом, приложенным к оси таким образом, чтобы упомянутая производная практически равнялась нулю.
сцепления (μ), как функции проскальзывания (δ), вычисляется и затем интегрируется с помощью интегратора, выход которого изменяет значение крутящего момента (С), которое должно быть передано в систему (1205) для управления крутящим моментом, приложенным к оси таким образом, чтобы упомянутая производная практически равнялась нулю.
12. Способ по любому из предшествующих пунктов, применяемый в состоянии буксования на стадии разгона, или в состоянии проскальзывания на стадии торможения.
| US 20080319611 A1, 25.12.2008 | |||
| US 2008116739 A1, 22.05.2008 | |||
| US 2005189886 A1, 01.09.2005. |

