Изобретение относится к способу обеспечения безопасности перемещения железнодорожного транспортного средства, движущегося по железнодорожному пути, при этом железнодорожное транспортное средство имеет по меньшей мере один датчик колеса, выполненный с возможностью выдачи информации, характеризующей скорость вращения колеса. Изобретение относится также к системе для обеспечения безопасности перемещения железнодорожного транспортного средства, при этом железнодорожное транспортное средство содержит, по меньшей мере, один датчик колеса, выполненный с возможностью генерирования одного или нескольких выходных значений, характеризующих вращение колеса, по меньшей мере, один датчик ускорения, ось чувствительности которого параллельна направлению пути, и контроллер, соединенный, по меньшей мере с одним из датчиков колеса и, по меньшей мере, с одним из датчиков ускорения. Изобретение относится также к контроллеру, установленному на железнодорожном транспортном средстве для обеспечения его безопасности, при этом контроллер выполнен с возможностью соединения, по меньшей мере, с одни датчиком колеса, выполненным с возможностью генерирования одного или нескольких выходных значений, характеризующих вращение колеса, и, по меньшей мере, с одним датчиком ускорения, ось чувствительности которого параллельна направлению пути. Изобретение относится также к железнодорожному транспортному средству, содержащему, по меньшей мере, один датчик колеса, выполненный с возможностью генерирования одного или нескольких выходных значений, характеризующих вращение колеса, по меньшей мере, один датчик ускорения, ось чувствительности которого параллельна направлению пути, и такой контроллер.
В Европе существуют несколько стандартов для обеспечения безопасности перемещения железнодорожного транспортного средства, применяемых в виде систем автоматической защиты поездов. Например, такими системами являются ETCS (European Train Control System) или PZB 90 (Punktformige Zugbeeinflussung).
В этих системах кривые скорости или торможения в зависимости от положения поезда определяют максимальную допустимую скорость для поезда в каждой точке пути. Если эта скорость превышена, то после одного или нескольких предупреждающих сигналов система тормозит поезд для его остановки. В системе ETCS поездам выдается предписание движения "Movement authority", указывающее максимальное расстояние, которое поезд может пройти, начиная от положения сигнального маяка, который он до этого прошел, и максимальные скорости, разрешенные на этом участке пути, в зависимости от положения поезда. Для его применения на борту поезда рассчитывают кривую скорости в зависимости от положения поезда. Эта кривая является характерной для поезда и для профиля пути, по которому движется поезд. Ее определяют в зависимости от характеристик торможения поезда, чтобы обеспечить его остановку до завершения действия полученного им предписания движения.
Такие системы нуждаются в наличии сложной одометрической функции на борту поезда для максимально точного определения положения поезда в данный момент времени, чтобы контролировать его максимальную скорость, допустимую в этом положении. Например, системы обеспечения безопасности поезда вычисляют пройденное максимальное расстояние для торможения поезда перед опасной точкой или для снижения максимальной допустимой скорости или пройденное минимальное расстояние для освобождения уже пройденного участка пути или для обеспечения возможности повышения скорости поезда.
Одометрическая система является сложной в реализации, и, чтобы гарантировать приемлемый уровень безопасности для таких систем, необходимо добавлять запасы надежности к определенным значениям положений, что снижает эффективность системы. Например, современные системы, использующие только датчик колеса, позволяющий измерять скорость, нуждаются в широких пределах безопасности, так как датчики колеса являются чувствительными к пробуксовке или к заклиниванию колес поезда. Следовательно, современные системы добавляют большой запас надежности, например около 3% от измеряемой скорости, для вычисления пройденного минимального расстояния и пройденного максимального расстояния. Погрешность, связанная с этим запасом, возрастает по отношению к пройденному расстоянию. Необходима точная одометрическая функция для обеспечения как безопасности, так и приемлемого уровня эффективности.
Задача изобретения состоит в устранении недостатков известных технических решений, в частности в улучшении использования данных датчика колеса для системы или способа обеспечения безопасности железнодорожного транспортного средства.
Поставленная задача решена в способе обеспечения безопасности перемещения железнодорожного транспортного средства, движущегося по железнодорожному пути, при этом железнодорожное транспортное средство имеет, по меньшей мере, один датчик колеса, выполненный с возможностью выдачи информации, характеризующей скорость вращения колеса, и, по меньшей мере, один датчик ускорения, ось чувствительности которого параллельна пути, при этом способ содержит следующие этапы:
- прием, по меньшей мере, одного выходного значения от одного или нескольких датчиков колеса;
- прием, по меньшей мере, одного выходного значения от одного из датчиков ускорения;
- определение, по меньшей мере, одного значения ускорения на основании выходного значения или выходных значений одного из датчиков ускорения; и
- использование одного или нескольких принятых выходных значений датчика или датчиков колеса для управления железнодорожным транспортным средством в зависимости от сравнения одного или нескольких значений ускорения, по меньшей мере, с одним контрольным значением ускорения.
Согласно предпочтительным отличительным признакам:
- использование включает в себя определение расстояния, в частности пройденного расстояния, на основании одного или нескольких принятых выходных значений;
- способ дополнительно содержит следующий этап: определение, по меньшей мере, одного надежного значения мгновенной скорости на основании одного или нескольких принятых выходных значений;
- использование дополнительно включает в себя следующий этап: вычисление значений максимальной допустимой скорости, в частности кривой максимальной допустимой скорости, основанной на одном или нескольких принятых выходных значениях, в частности, с использованием расстояния, например пройденного расстояния, и/или одного или нескольких надежных значений мгновенной скорости.
- кривая максимальной допустимой скорости является функцией времени или расстояния;
- использование одного или нескольких принятых выходных значений для управления железнодорожным транспортным средством включает в себя вычисление минимального расстояния и/или максимального расстояния, пройденного железнодорожным транспортным средством; и/или
- управление железнодорожным транспортным средством включает в себя сравнение мгновенной скорости железнодорожного транспортного средства с максимальной допустимой скоростью и торможение железнодорожного транспортного средства в зависимости от результата сравнения максимальной допустимой скорости с мгновенной скоростью.
Кроме того, поставленная задача решена в системе обеспечения безопасности перемещения железнодорожного транспортного средства, при этом железнодорожное транспортное средство содержит, по меньшей мере, один датчик колеса, выполненный с возможностью генерирования одного или нескольких выходных значений, характеризующих вращение колеса, по меньшей мере, один датчик ускорения, ось чувствительности которого параллельна направлению пути, и контроллер, соединенный, по меньшей мере, с одним из датчиков колеса и, по меньшей мере, с одним из датчиков ускорения, при этом согласно изобретению контроллер выполнен с возможностью использования одного или нескольких принятых выходных значений датчика или датчиков колеса для управления железнодорожным транспортным средством в зависимости от сравнения одного или нескольких значений ускорения, определенных на основании одного или нескольких выходных значений датчика или датчиков ускорения, по меньшей мере, с одним контрольным значением ускорения.
Согласно предпочтительным отличительным признакам:
- контроллер выполнен с возможностью осуществления одного или нескольких этапов заявленного способа.
Кроме того, поставленная задача решена в контроллере, установленном на железнодорожном транспортном средстве для обеспечения его безопасности, при этом контроллер выполнен с возможностью соединения, по меньшей мере, с одним датчиком колеса, выполненным с возможностью генерирования одного или нескольких выходных значений, характеризующих вращение колеса, и, по меньшей мере, с одним датчиком ускорения, ось чувствительности которого параллельна направлению пути, согласно изобретению контроллер выполнен с возможностью использования одного или нескольких принятых выходных значений датчика или датчиков колеса для управления железнодорожным транспортным средством в зависимости от сравнения одного или нескольких значений ускорения, определенных на основании одного или нескольких выходных значений датчика или датчиков ускорения, по меньшей мере, с одним контрольным значением ускорения.
Согласно предпочтительным отличительным признакам:
- контроллер выполнен с возможностью осуществления одного или нескольких этапов заявленного способа.
Поставленная задача решена также в железнодорожном транспортном средстве, содержащем: по меньшей мере, один датчик колеса, выполненный с возможностью генерирования одного или нескольких выходных значений, характеризующих вращение колеса, по меньшей мере, один датчик ускорения, ось чувствительности которого параллельна направлению пути, и контроллер, соединенный, по меньшей мере, с одним из датчиков колеса и, по меньшей мере, с одним из датчиков ускорения.
Изобретение и его преимущества будут более очевидны из нижеследующего описания, представленного исключительно в качестве примера, со ссылками на прилагаемые чертежи.
На фиг.1 схематично показано железнодорожное транспортное средство на железнодорожном пути;
на фиг.2 схематично показаны бортовые устройства системы обеспечения безопасности железнодорожного транспортного средства;
на фиг.3 схематично показано железнодорожное транспортное средство на склоне;
на фиг.4 показана блок-схема способа обеспечения безопасности железнодорожного транспортного средства;
на фиг.5 представлена кривая максимальной допустимой скорости в зависимости от положения в данный момент времени;
на фиг.6 представлена кривая максимальной допустимой скорости в зависимости от времени;
на фиг.7 представлена блок-схема части способа согласно варианту осуществления изобретения;
на фиг.8 представлена кривая максимальной допустимой скорости в зависимости от времени.
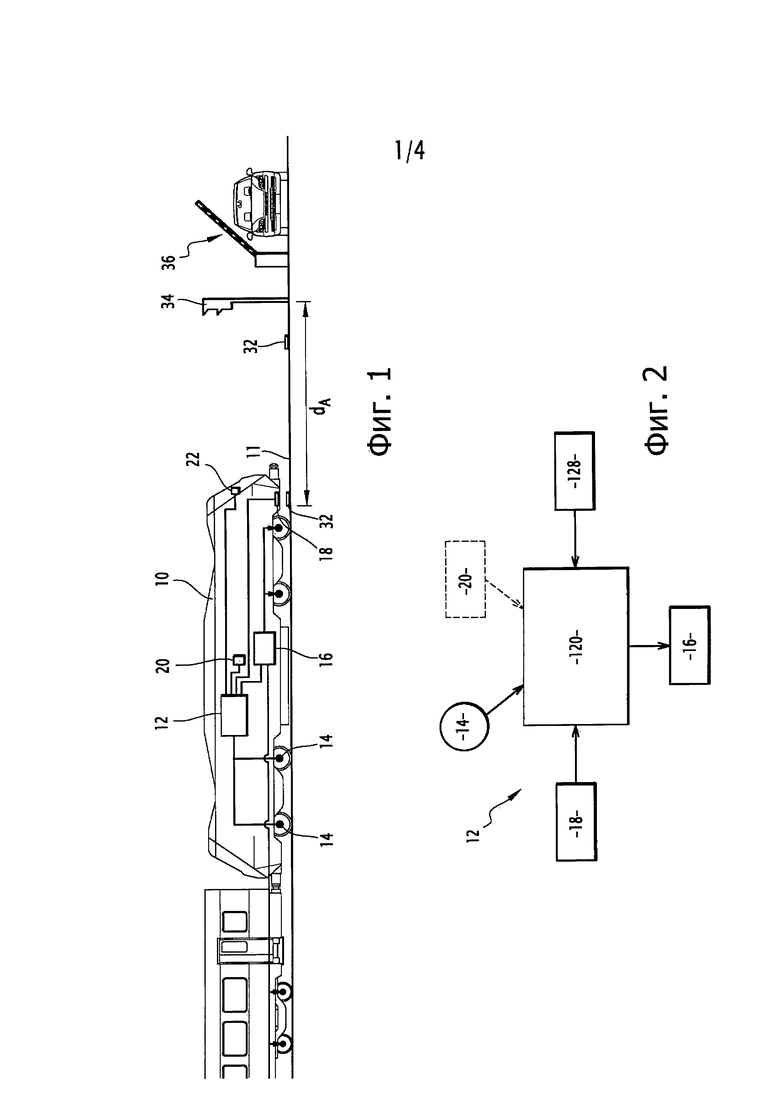
На фиг.1 схематично показан поезд или железнодорожное транспортное средство 10, движущееся по железнодорожному пути 11. Путь 11 и транспортное средство защищены при помощи системы в соответствии с изобретением. Железнодорожное транспортное средство 10 содержит один или несколько вагонов, по меньшей мере, один из которых содержит систему тяги, например двигатель.
Система обеспечения безопасности перемещения железнодорожного транспортного средства должна обеспечить остановку железнодорожного транспортного средства 10 перед опасной точкой и не допустить прохождения им предельной точки. Такая система должна также обеспечивать соблюдение железнодорожным транспортным средством ограничений скорости, чтобы избежать превышения скорости в опасных точках пути 11, например, на виражах, в местах проведения работ на путях, на железнодорожных переездах и т.д.
Система включает в себя наземные устройства и бортовые устройства, установленные на железнодорожном транспортном средстве 10. Наземные устройства выполнены с возможностью передачи информации на бортовые устройства.
Железнодорожное транспортное средство 10 содержит контроллер 12 для обеспечения безопасности железнодорожного транспортного средства 10, соединенный, по меньшей мере, с одним датчиком 14 колеса для определения мгновенной скорости железнодорожного транспортного средства 10. Он соединен также с системой 16 торможения, с приемником 18 путевой информации, с датчиком 20 ускорения, например, в виде акселерометра, и с индикатором или устройством 22 управления для представления машинисту необходимой информации.
Система 16 торможения выполнена с возможностью управления тормозами железнодорожного транспортного средства 10 на основании команд, поступающих от контроллера 12.
Приемник 18 путевой информации выполнен с возможностью приема сигналов, передаваемых сигнальными маяками 32, установленными вдоль пути.
Датчик 20 ускорения имеет ось чувствительности в направлении пути 11. Иначе говоря, он измеряет ускорение параллельно рельсам пути 11.
Наземные устройства включают в себя один или несколько сигнальных маяков 32, расположенных вдоль пути 11 и выполненных с возможностью передачи информации на железнодорожное транспортное средство 10. Кроме того, они включают в себя сигнальный знак 34 остановки, такой как семафор, до которого разрешено двигаться железнодорожному транспортному средству 10. Маяки 32 являются, например, сигнальными маяками для системы ETCS.
Перед сигнальным знаком 34 определяют предписание движения по причине наличия опасной точки 36 на пути 11 за сигналом 34, например, железнодорожного переезда, шлагбаум которого еще не перекрыт. Это предписание движения характеризуется максимальным расстоянием, обозначаемым dA, которое разрешено для прохождения железнодорожного транспортного средства, начиная от определенной точки, которой в данном случае является положение сигнального маяка 32. Таким образом, предписание движения определяет максимальный отрезок пути, который может пройти железнодорожное транспортное средство, не выходя за его выходной конец.
Например, маяки 32 могут передавать на железнодорожное транспортное средство 10 данные о максимальном расстоянии dA, разрешенном для прохождения железнодорожного транспортного средства от маяка 32, перепад пути 11 и максимальные допустимые скорости в зависимости от положения на пути, например, относительно заранее определенного расстояния от маяка 32 или от другой неподвижной контрольной точки. Перепад пути обозначает наклон пути.
В варианте осуществления предназначенное для прохождения расстояние и значения максимальной допустимой скорости на пути 11 на заранее определенном расстоянии передаются одновременно, например, в виде кривой максимальной допустимой скорости в зависимости от расстояния. Иначе говоря, маяк 32 выдает железнодорожному транспортному средству 10 предписание движения с точки зрения расстояния и максимальных допустимых скоростей.
В другом варианте осуществления существуют, по меньшей мере, два типа сигнальных маяков 32, из которых первый тип выдает транспортному средству предписание движения, а второй тип выдает только контрольную точку, чтобы сообщить железнодорожному транспортному средству расстояние, уже пройденное с момента последнего предписания движения, полученного железнодорожным транспортным средством.
В других вариантах осуществления информацию о расстоянии, разрешенном для прохождения железнодорожного транспортного средства 10, и/или о максимальных допустимых скоростях в зависимости от расстояния на пути 11 передают при помощи другой системы, например при помощи радиосвязи, такой как GSM-R.
В варианте сигнальные маяки 32 являются виртуальными маяками, которые определены своим положением или своими координатами. В этом случае железнодорожное транспортное средство содержит приемник системы геолокализации, соединенный с контроллером 12. Если железнодорожное транспортное средство проходит над виртуальным маяком, что определяют путем сравнения положения в данный момент времени железнодорожного транспортного средства и положения виртуального маяка, данные о расстоянии, разрешенном для прохождения железнодорожного транспортного средства 10, и/или о максимальных допустимых скоростях в зависимости от расстояния на пути 11 поступают через радиосвязь.
На фиг.2 схематично показаны бортовые устройства системы обеспечения безопасности перемещения железнодорожного транспортного средства. Способ осуществляет программа, управляющая контроллером 12, установленным на железнодорожном транспортном средстве 10.
Контроллер 12 содержит вычислительный блок 120, например бортовой компьютер, выполненный с возможностью вычисления кривой максимальной допустимой скорости в зависимости от времени, что будет описано ниже, и с возможностью сравнения мгновенной скорости железнодорожного транспортного средства 10 с максимальной допустимой скоростью в рассматриваемый момент. В другом варианте осуществления вычислительный блок выполнен с возможностью вычисления кривой максимальной допустимой скорости в зависимости от расстояния, характерной для этого железнодорожного транспортного средства, пройденного максимального расстояния и/или пройденного минимального расстояния.
Датчик 14 колеса соединен с вычислительным блоком 120 для передачи информации о вращении колеса, связанного с датчиком колеса. Например, датчик 14 колеса выполнен с возможностью непрерывной передачи в вычислительный блок 120 импульсов на частоте, пропорциональной скорости вращения колеса и/или измеренной мгновенной скорости. Датчик 14 является, например, датчиком углового положения колеса. В рамках способа обеспечения безопасности перемещения железнодорожного транспортного средства, согласно варианту осуществления, датчик 14 колеса используют в целях одометрии и тахометрии, например, для указания машинисту измеренной мгновенной скорости и/или для сравнения измеренной мгновенной скорости с максимальной допустимой скоростью.
Датчик 20 ускорения соединен с вычислительным блоком 120, который на основании данных датчика 20 ускорения может определять, являются ли релевантными данные, поступающие от датчика 14 колеса, и можно ли их использовать для вычислений кривой максимальной допустимой скорости в зависимости от времени, что будет описано ниже. Благодаря датчику 20 ускорения, согласно изобретению, контроллер 12 или его вычислительный блок 120 может определить, что колесо железнодорожного транспортного средства не находится в фазе пробуксовки или заклинивания. Таким образом, контроллер 12 может определить, можно ли использовать в целях одометрии информацию о вращении колеса, связанного с датчиком колеса.
Как показано на фиг.2, с вычислительным блоком 120 соединен приемник 18 путевой информации, выполненный с возможностью передачи на него предписания движения и/или положения при каждом прохождении над сигнальным маяком 32.
Запоминающее устройство 128 контроллера содержит модель железнодорожного транспортного средства, включающую в себя его динамическую модель, позволяющую контроллеру 12 вычислять кривую торможения и/или скорости в зависимости от положения или от времени для соблюдения принятого предписания движения, что будет подробнее описано ниже.
Кроме того, вычислительный блок 120 управляет системой 16 торможения. Например, если вычислительный блок контроллера 12 обнаруживает, что железнодорожное транспортное средство движется со скоростью, превышающей максимальную скорость, определенную кривой скорости в зависимости от времени или в зависимости от расстояния, он подает команду на систему 16 торможения для осуществления экстренного торможения, чтобы железнодорожное транспортное средство не прошло опасную точку, например, после возможного предупредительного сигнала.
Сначала на основании данных датчика колеса или датчика ускорения выводят надежное значение скорости. Затем в рамках способа надежное значение скорости применяют для вычисления кривой максимальной допустимой скорости в зависимости от времени, в которой используют минимальное расстояние и максимальное расстояние, пройденные железнодорожным транспортным средством.
Теоретически для точной оценки скорости железнодорожного транспортного средства можно использовать значения ускорения от акселерометра, но это усложняет задачу по причине влияния перепада пути 11, так как акселерометр измеряет сумму сил в оси чувствительности датчика 20 ускорения. Поэтому необходимо точно знать перепад пути 11. Кроме того, для такого вычисления нельзя использовать профиль перепада пути 11, передаваемый на железнодорожное транспортное средство в предписании движения. Заявленный способ предлагает другое решение для определения точной мгновенной скорости.
Как правило, если железнодорожное транспортное средство 10 движется, не производя усилия ускорения или торможения, значения, измеряемые датчиком 14 колеса, являются надежными, так как не возникает риска пробуксовки или заклинивания. В целом эти результаты являются надежными, если колесо не пробуксовывает или не заклинивает.
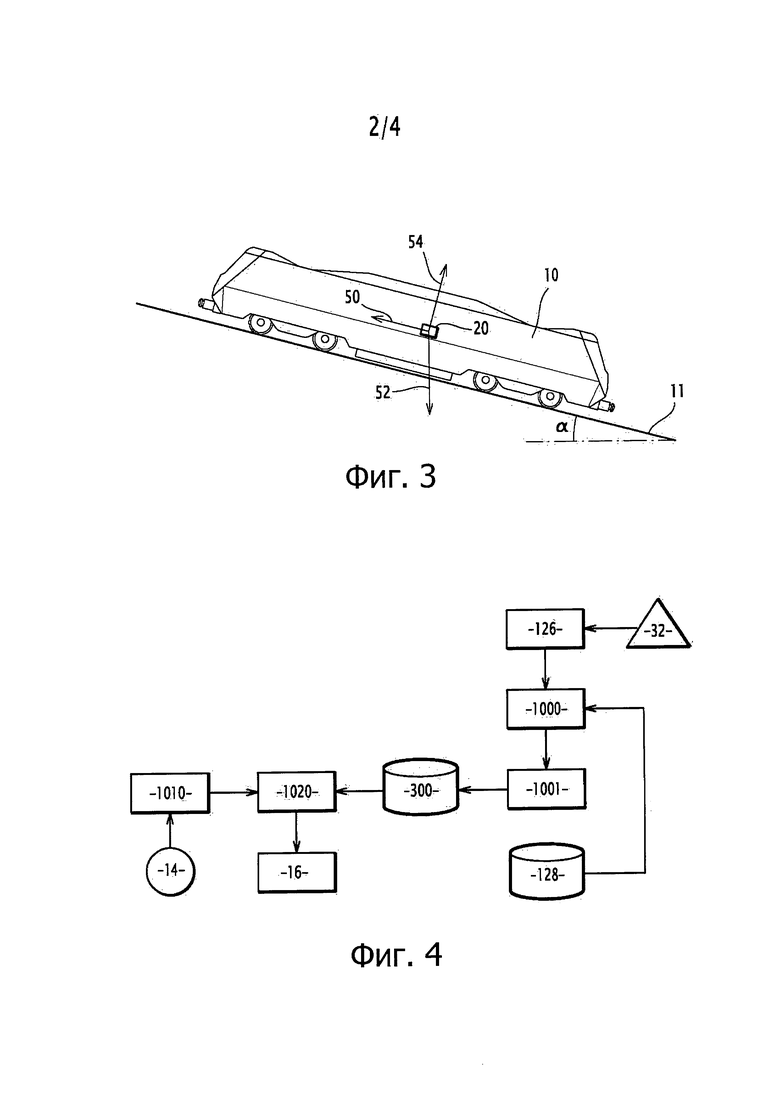
На фиг.3 показано железнодорожное транспортное средство 10 на железнодорожном пути 11, имеющем наклон под углом а. В случае, когда железнодорожное транспортное средство 10 остановилось на пути 11, задействовав тормоза, чтобы избежать любого движения, силами, действующими на железнодорожное транспортное средство 10, являются сила тяжести 52, сила торможения 50 (=M×g×sin α) и сила реакции 54 пути =M×g×cos α), где M обозначает массу железнодорожного транспортного средства, g обозначает ускорение свободного падения, и α обозначает угол между путем и горизонталью. Нормальная сила 54 соответствует силе, которой путь действует на железнодорожное транспортное средство 10. В сумме три силы 50, 52, 54 дают силу, равную нулю, так как железнодорожное транспортное средство стоит на месте. Датчик 20 ускорения измеряет только силу торможения 50, которая имеет значение, равное составляющей силы тяжести в направлении пути 11.
В случае, когда железнодорожное транспортное средство 10 движется на склоне без усилий, силы торможения и тяги являются нулевыми, и только часть силы тяжести, которая не измеряется акселерометром, в направлении пути (M×g×sin α) ускоряет железнодорожное транспортное средство 10.
Таким образом, бортовой датчик 20 ускорения не измеряет силу 52 тяжести или ее составляющую в направлении пути 11. Кроме того, по причине своей оси чувствительности датчик 20 ускорения не измеряет нормальную силу 54, которая является ортогональной к оси чувствительности акселерометра 34. Единственной силой, измеряемой акселерометром 20, являются сила, действующая на путь 11 со стороны тяги или тормоза, и силы трения. Действительно, датчик 20 ускорения измеряет ускорение только в направлении пути. Следовательно, датчик 20 ускорения можно использовать, чтобы узнать и измерить усилие, которым действует на путь 11 железнодорожное транспортное средство 10. Это позволяет отслеживать периоды, во время которых пробуксовка невозможна: когда железнодорожное транспортное средство не производит никакого тягового усилия. Точно так же, способ позволяет отслеживать периоды, во время которых невозможно заклинивание: когда железнодорожное транспортное средство не производит никакого тормозного усилия.
Таким образом, можно определить периоды, во время которых датчик колеса выдает надежную информацию о мгновенной скорости железнодорожного транспортного средства. Эту достоверную мгновенную скорость можно использовать для вычисления кривых максимальной допустимой скорости, пройденного максимального расстояния и/или пройденного минимального расстояния.
Ниже следует описание способа определения кривой скорости в зависимости от времени, в котором для повышения его эффективности используют надежную информацию о мгновенной скорости.
На фиг.4 представлена блок-схема базового способа для определения кривой скорости в зависимости от времени. Ее описание представлено одновременно с описанием кривых максимальной допустимой скорости на фиг.5 и 6. Затем будет пояснено применение надежной информации о мгновенной скорости со ссылками на фиг.7 и 8.
От сигнального маяка 32 поступает предписание движения в виде кривой 200 максимальной допустимой скорости на пути 11 в зависимости от положения на пути, то есть в зависимости от расстояния относительно контрольной точки, в частности, сигнального маяка 32, и максимальное расстояние dA, предназначенное для прохождения от этого маяка.
Во время прохождения над маяком 32 железнодорожное транспортное средство 10 имеет скорость V0. В варианте осуществления контроллер 12 не знает точной реальной скорости V0. Зато контроллер 12 знает интервал скорости между V0,min и V0,max, включающий в себя реальную скорость железнодорожного транспортного средства 10.
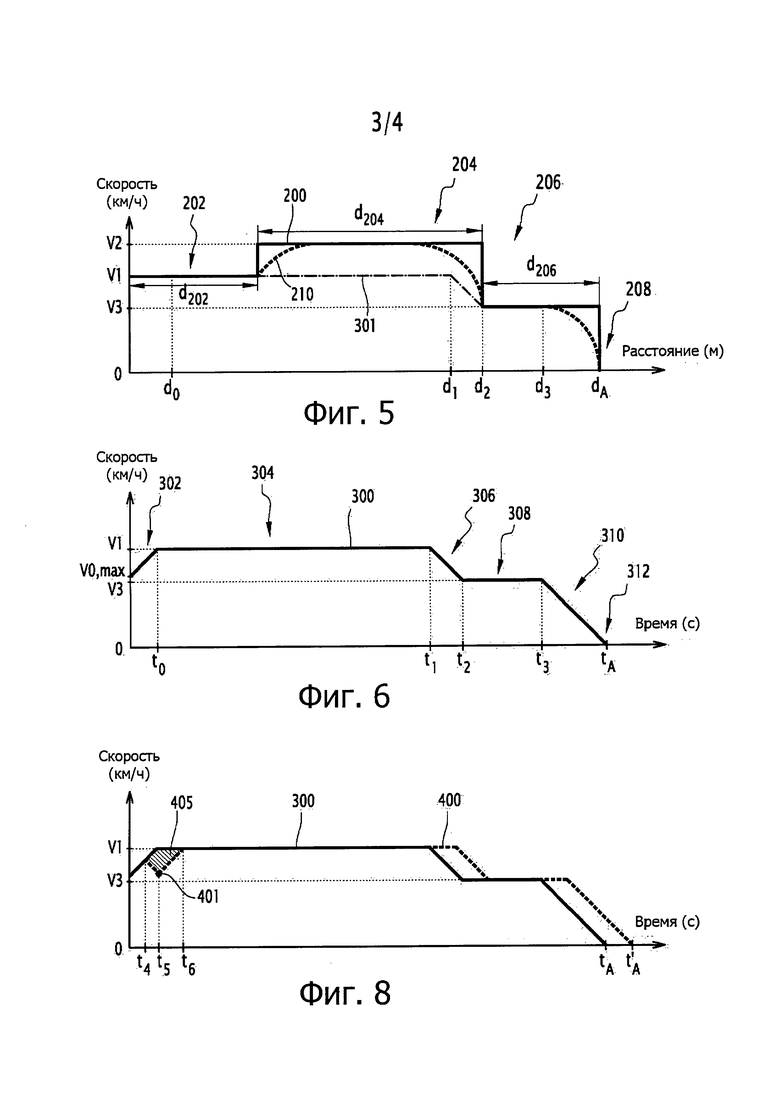
Показанная на фиг.5 кривая 200 максимальной допустимой скорости, выдаваемая маяком 32, содержит три участка 202, 204, 206 с разными максимальными допустимыми скоростями на разных участках пути. Расстояние 0 соответствует положению сигнального маяка 32.
На первом участке 202 пути 11 железнодорожному транспортному средству 10 разрешено двигаться на первой максимальной допустимой скорости V1 на первом расстоянии d202. На втором участке 204 пути 11 железнодорожному транспортному средству 10 разрешено двигаться на второй максимальной допустимой скорости V2 на втором расстоянии d204, и на третьем участке 206 пути железнодорожному транспортному средству 10 разрешено двигаться на третьей максимальной допустимой скорости V3 на третьем расстоянии d206, прежде чем оно достигнет конца действия предписания движения, где железнодорожное транспортное средство должно будет остановиться в точке 208. Три участка 202, 204, 206 вместе соответствуют максимальному расстоянию dA, разрешенному для прохождения железнодорожным транспортным средством.
На основании участков 202, 204, 206 с их максимальной допустимой скоростью, соответственно V1, V2, V3, вычислительный блок 120 вычисляет на этапе 1000, показанном на фиг.4, специальную кривую 210 максимальной допустимой скорости в зависимости от положения транспортного средства на пути специально для данного железнодорожного транспортного средства 10, используя информацию о динамической модели железнодорожного транспортного средства, записанную в запоминающем устройстве 128, и, в случае необходимости, информацию о топологии пути. Например, используют данные о мощностях торможения и/или ускорения, получаемые из динамической модели железнодорожного транспортного средства, записанной в запоминающем устройстве 128.
Эта специальная кривая 210 максимальной допустимой скорости в зависимости от расстояния отличается от максимальной допустимой скорости на пути 11 до или после смены участка. Она показана на фигуре пунктирной линией.
Как показано на фиг.4, на этапе 1001 контроллер 12 вычисляет кривую 300 максимальной допустимой скорости в зависимости от времени, а не в зависимости от положения, на основании специальной кривой 210 максимальной допустимой скорости в зависимости от расстояния, используя динамическую модель железнодорожного транспортного средства, записанную в запоминающем устройстве 128. Кривая 300 максимальной допустимой скорости в зависимости от времени схематично показана на фиг.6. В целях иллюстрации на фиг.5 показана специальная кривая 301 максимальной допустимой скорости в зависимости от расстояния, которая соответствует кривой 300 максимальной допустимой скорости в зависимости от времени.
Железнодорожное транспортное средство использует кривую 300 максимальной допустимой скорости в зависимости от времени для сравнения в любой момент своего движения своей мгновенной скорости с максимальной допустимой скоростью в этот конкретный момент и для осуществления торможения в случае превышения этой максимальной допустимой скорости, например, после возможного предупредительного сигнала.
Заявленные система и способ гарантируют, что ни в один из моментов транспортное средство не превысит максимально допустимые скорости на различных участках пути 11.
Оставшееся для движения максимальное время tA начинается в момент, когда железнодорожное транспортное средство 10 проходит через начало максимального отрезка пути, разрешенного для прохождения железнодорожного транспортного средства и соответствующего расстоянию dA. Время tA начинается, например, в момент, когда железнодорожное транспортное средство проходит над маяком 32, который передал предписание движения.
Далее следует описание упрощенного примера построения кривой 300 максимальной допустимой скорости в зависимости от времени, которое осуществляют, когда железнодорожное транспортное средство проходит над маяком 32. В первом интервале времени 302 максимальную допустимую скорость увеличивают с мгновенной скорости V0,max до скорости V1, которая будет разрешена во время интервала времени 304, с использованием максимальной мощности ускорения amax железнодорожного транспортного средства, записанной в запоминающем устройстве 128. Железнодорожное транспортное средство достигает, - теоретически для вычисления кривой 300 в зависимости от времени, - максимальной скорости V1 после времени t0 после прохождения расстояния d0. Если предположить, что ускорение является постоянным, то
время t0=(V1-V0,max)/amax, и
соответствующее пройденное расстояние d=(V1+V0,max)×t0/2.
Максимальная скорость V будет разрешена во время интервала времени 304. Этот интервал времени 304 соответствует времени, необходимому железнодорожному транспортному средству для прохождения расстояния между d0 и d1, если оно движется со скоростью V1. Для вычисления кривой 300 максимальной допустимой скорости в зависимости от времени на участке 204 вычислительный блок не использует увеличения максимальной допустимой скорости на пути от участка 202 до участка 204, чтобы перейти от V1 к V2, если он не располагает надежной информацией о том, что железнодорожное транспортное средство 10 уже прошло расстояние d202. Эта информация поступает, например, от маяка, расположенного между участками 202 и 204, или ее получают посредством вычисления пройденного минимального расстояния при помощи выходных сигналов датчика 14 колеса и датчика 20 ускорения, что будет пояснено ниже.
Например, если железнодорожное транспортное средство использовало датчик колеса для оценки расстояния d202, пробуксовка, например, во время ускорения от V0 до V1, может привести к завышенной оценке пройденного расстояния. Таким образом, железнодорожное транспортное средство может все еще находиться на участке 202 вместо 204. Следовательно, если бы способ разрешил ускорение от V1 до V2, железнодорожное транспортное средство могло бы двигаться с повышенной скоростью, не допустимой на участке 202.
Далее предположим, что между участками 202 и 204 не поступило никакой информации о положении.
Расстояние d1 зависит от расстояния d2, которое соответствует концу участка 204 и которое известно, и от мощностей минимального гарантированного торможения af для снижения скорости с V1 до V3 в конце участка 204.
Железнодорожному транспортному средству, движущемуся на скорости V1, необходимо время t2-t1=(V3-V1)/df, соответствующее интервалу времени 306, для снижения своей скорости до скорости V3, и расстояние между d1 и d2, которое соответствует (V3+V1)/2×(t2-t1)⋅d1 определяют при помощи вышеуказанных уравнений. На основании этой информации можно вычислить время t1, до которого железнодорожному транспортному средству разрешено двигаться с максимальной скоростью V1, например, t1=(d1-d0)/V1+t0.
Таким образом, наша кривая 300 максимальной допустимой скорости в зависимости от времени построена до времени t2.
Интервал времени 308, в котором разрешена максимальная скорость V3, интервал времени 310 и время t3, начиная от которого транспортное средство должно снижать свою скорость, если оно движется на скорости V3, вычисляют аналогично интервалам времени 304 и 306. Таким образом, кривую 30 максимальной допустимой скорости в зависимости от времени вычисляют до tA.
Кривая 300 максимальной допустимой скорости в зависимости от времени, вычисляемая вычислительным блоком 120, зависит от максимальной допустимой скорости 200 на пути, которую предписывают, например, железнодорожные власти и которая обусловлена возможностями торможения и ускорения железнодорожного транспортного средства 10. Таким образом, кривая 300 скорости в зависимости от времени определяет для данного момента максимальную допустимую скорость для железнодорожного транспортного средства.
Вычисление осуществляют, предполагая, что железнодорожное транспортное средство продолжает двигаться на максимальной допустимой скорости кривой скорости в зависимости от времени и что оно использует свои максимальные возможности ускорения и/или гарантированного минимального замедления динамической модели железнодорожного транспортного средства. Таким образом, железнодорожное транспортное средство, соблюдающее эти пределы скорости, не допускает превышения расстояния dA своего предписания движения.
В течение осуществления способа транспортное средство движется на максимальной скорости, задаваемой кривой 300 максимальной допустимой скорости в зависимости от времени. Если бы транспортное средство двигалось со скоростью ниже кривой максимальной допустимой скорости в зависимости от времени, оно могло бы не достичь конца расстояния dA своего предписания движения, так как время tA наступило бы раньше.
В варианте осуществления до построения кривой максимальной скорости в зависимости от времени сначала мгновенную скорость считают нулевой, например, если железнодорожное транспортное средство начинает двигаться после стоянки на станции.
На этапе 1020 управления скоростью контроллер 12, использующий измеряемую мгновенную скорость и кривую 300 скорости в зависимости от времени, обеспечивает соблюдение максимальной допустимой скорости железнодорожным транспортным средством 10. Если максимальная допустимая скорость превышена, контроллер 12, в частности, на этапе 1020 управления подает команду на экстренное торможение на систему 16 торможения. Следует отметить, что для такой тахометрической функции используют информацию, поступающую от датчика 14 колеса.
Как правило, эффективность системы и способа, использующих кривые скоростей в зависимости от времени, повышается, если транспортное средство использует больше датчиков и/или если на пути 33 установлено больше сигнальных маяков.
Эта базовая система, использующая кривые скоростей в зависимости от времени, не теряет эффективности по сравнению с системой, основанной на пройденном расстоянии, если расстояние, пройденное до применения тормозов, больше расстояния до ближайшего встречаемого маяка, который в варианте осуществления опять запускает вычисление кривой максимальной допустимой скорости в зависимости от времени.
В варианте осуществления система оставляет машинисту возможность начать торможение заранее и приблизиться к точке остановки на умеренной скорости без применения экстренного торможения. Например, когда машинист начинает ранее торможение, он достигает умеренной скорости Vrelease задолго до необходимости применения экстренного торможения.
Способ и система позволяют еще больше повысить эффективность, когда они непрерывно учитывают пройденное минимальное расстояние и пройденное максимальное расстояние для вычисления обновленной кривой максимальной допустимой скорости в зависимости от времени. Это возможно за счет знания одного или нескольких надежных значений мгновенной скорости, определяемой при помощи способа в соответствии с изобретением. В этом случае способ использует одометрию, основанную на датчике 14 колеса и на датчике 20 ускорения.
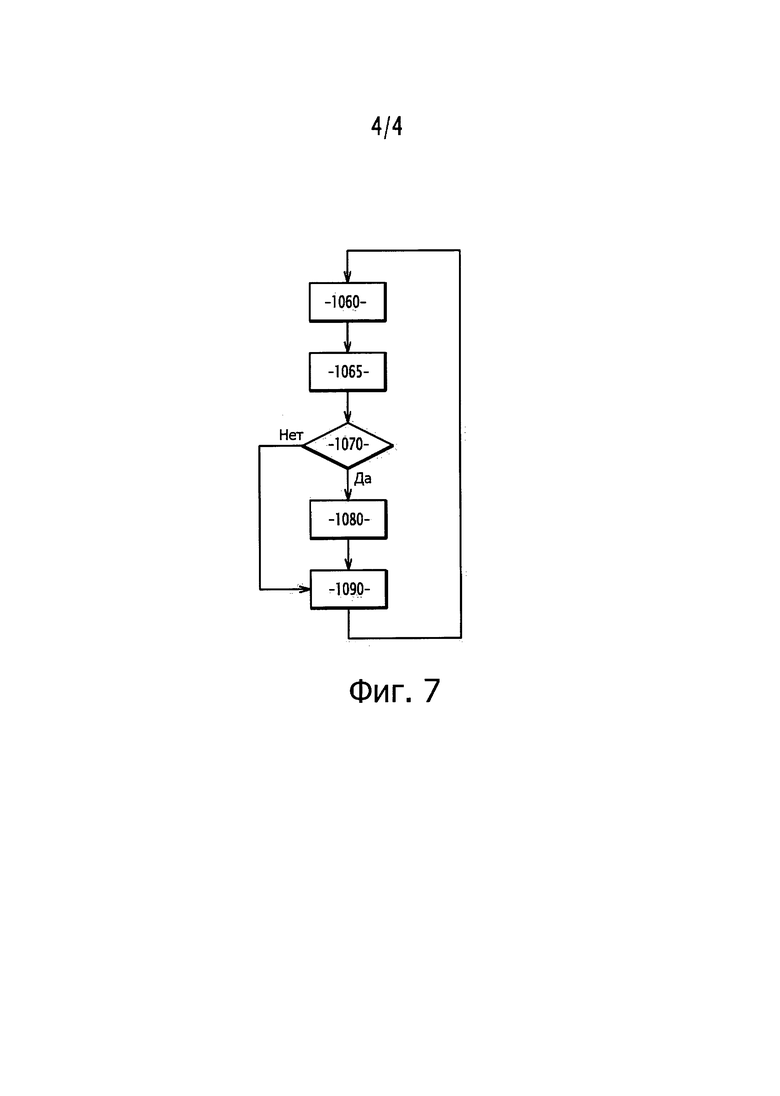
Далее следует описание варианта осуществления изобретения вместе с описанием блок-схемы на фиг.7, где представлена часть способа обеспечения безопасности железнодорожного транспортного средства. Например, такой способ применяют в системе автоматической защиты поезда, основанной на времени. Вместе с тем, изобретение можно также применять в других способах для обеспечения безопасности перемещения железнодорожного транспортного средства.
Вычислительный блок 120 определяет, являются ли надежными данные мгновенной скорости, измеряемой на этапе тахометрии 1010 датчиком 14 колеса, и можно ли их использовать для одометрии с целью перерасчета кривой 300 максимальной допустимой скорости в зависимости от времени.
На этапе 1060 контроллер 12 получает, по меньшей мере, одно выходное значение, по меньшей мере, от одного из датчиков 14 колеса. Например, выходное значение представляет собой совокупность импульсов, частота которых характеризует скорость вращения колеса. В другом варианте осуществления датчик 14 колеса сам выдает значение мгновенной скорости, то есть либо мгновенную скорость вращения колеса, либо оценку мгновенной скорости железнодорожного транспортного средства 10, вычисляемую посредством простого умножения угловой скорости колеса на его радиус. В варианте осуществления оценка включает в себя максимальное значение мгновенной скорости и минимальное значение мгновенной скорости, если вычислительный блок 120 применяет запас надежности вокруг значения измеряемой мгновенной скорости.
На этапе 1065 контроллер 12 получает выходное значение, выдаваемое датчиком 20 ускорения. Выходное значение характеризует измеряемое ускорение в направлении оси чувствительности датчика 20 ускорения. Значение ускорения является положительным, если железнодорожное транспортное средство 10 ускоряется на горизонтальном пути 11, и отрицательным, если железнодорожное транспортное средство 10 тормозит на горизонтальном пути 11. Например, датчик ускорения сам выдает значение ускорения. Этапы 1060 и 1065 можно также осуществлять параллельно или в обратном порядке. В варианте осуществления время измерения датчика ускорения и/или датчика колеса записывают, чтобы синхронизировать выходные значения датчика 20 ускорения и датчиков 14 колеса.
На основании значений ускорения вычислительный блок 120 отслеживает, когда датчик 14 колеса выдает надежные результаты, которые можно использовать для оценки пройденного расстояния или мгновенной скорости железнодорожного транспортного средства 10. В варианте осуществления вычислительный блок 120 определяет периоды, во время которых выходные значения, поступающие от датчика 14 колеса для определения мгновенной скорости, можно использовать для оценки пройденного максимального расстояния (когда создаваемое тормозное усилие не может вызвать заклинивания). Точно так же, вычислительный блок 120 определяет периоды, во время которых выходные значения, поступающие от датчика 14 колеса для определения мгновенной скорости, можно использовать для оценки пройденного минимального расстояния (когда создаваемое тяговое усилие не может вызвать пробуксовки).
Эти определения осуществляют на этапе 1070, во время которого значения ускорения в направлении пути сравнивают со заранее определенными значениями ускорения.
В случае вычисления пройденного максимального расстояния можно использовать значения мгновенной скорости или, в случае необходимости, максимальные значения мгновенной скорости, если усилие, измеряемое акселерометром, превышает первое заранее определенное значение (например, -0,4 м/с2). Действительно, в этом случае убеждаются, что железнодорожное транспортное средство не тормозит в достаточной мере, чтобы возникло заклинивание. За счет этого способ гарантирует, что значение мгновенной скорости, определенной датчиком колеса, не приведет к недооценке пройденного расстояния.
В случае вычисления пройденного минимального расстояния можно использовать значения мгновенной скорости или, в случае необходимости, минимальные значения мгновенной скорости, если усилие, измеряемое акселерометром, меньше второго заранее определенного значения (например, 0,4 м/с2). Действительно, в этом случае убеждаются, что железнодорожное транспортное средство не создает достаточной тяги, чтобы возникла пробуксовка. За счет этого способ гарантирует, что значение мгновенной скорости, определенной датчиком колеса, не приведет к переоценке пройденного расстояния.
При этом этап 1070 обеспечивает, чтобы выходные значения датчика 14 колеса использовались только во время надежных периодов, то есть вне периодов риска пробуксовки или заклинивания колеса, на котором установлен датчик колеса, или, говоря другими словами, когда железнодорожное транспортное средство 10 движется, не действуя усилием на рельсы.
В варианте осуществления заранее определенные значения ускорения зависят от колесной оси, на которой находится датчик колеса. Например, моторизованное или оборудованное тормозом колесо имеет заранее определенное значение ускорения, отличное от не моторизованного или не оборудованного тормозом колеса. В варианте осуществления усилия трения, существующие в транспортном средстве и измеряемые акселерометром, включены в интервалы запаса, взятые вокруг измерения.
Если данные мгновенной скорости или, в случае необходимости, минимальные значения мгновенной скорости, измеряемые датчиком или датчиками 14 колеса, являются надежными и пригодными для одометрии, в частности, для оценки пройденного минимального расстояния и/или для оценки пройденного максимального расстояния, их используют на этапе 1080 для вычисления новой кривой максимальной допустимой скорости в зависимости от времени с учетом минимального расстояния и/или максимального расстояния, пройденного железнодорожным транспортным средством 10. В противном случае никакого нового вычисления не производят и этап 1080 пропускают.
Перерасчет кривой максимальной допустимой скорости в зависимости от времени описан со ссылками на фиг.8, где показана кривая 300 скорости в зависимости от времени, которая соответствует кривой 300 скорости в зависимости от времени, показанной на фиг.6. В момент t5 контроллер 12 выводит на этапе 1070 надежное значение мгновенной скорости 401 для вычисления пройденного максимального расстояния. Эта мгновенная скорость 401 ниже максимальной допустимой скорости, показанной на кривой 300 скорости в зависимости от времени. Вычислительный блок учитывает мгновенные скорости или, в случае необходимости, максимальные значения мгновенной скорости, поступающие от датчика 14 колеса. После вычисления пройденного максимального расстояния контроллер 12 предполагает из соображений безопасности для вычисления кривой 400 максимальной допустимой скорости в зависимости от времени, что железнодорожное транспортное средство 10 ускоряется затем со своей максимальной мощностью ускорения amax после надежного значения мгновенной скорости 401, чтобы достичь максимальной допустимой скорости V1 в момент t6. Вычисление производят, как в примере, описанном со ссылками на фиг.6, с использованием пройденного максимального расстояния в качестве исходной точки.
До надежного значения мгновенной скорости 401 контроллер предполагает для вычисления кривой 400 максимальной допустимой скорости в зависимости от времени, что транспортное средство затормозило между t4 и t5 с максимальными мощностями торможения, начиная от максимальной допустимой скорости в момент t4, чтобы достичь скорости 401 в момент t5. Заштрихованная область отображает расстояние, соответствующее разности между dA и точкой перед dA, где железнодорожное транспортное средство остановилось бы, если бы не было нового вычисления кривой скорости в зависимости от времени.
При использовании значения мгновенной скорости 401 можно заметить, что максимальная разрешенная продолжительность tA’ движения железнодорожного транспортного средства 12 увеличилась по сравнению с максимальным разрешенным временем tA движения кривой скорости 300 в зависимости от времени.
На этапе 1090, который соответствует этапу 1020 на фиг.4, кривые 300, 400 максимальных допустимых скоростей в зависимости от времени используют для автоматического управления железнодорожным транспортным средством, в частности, для управления его торможением, если железнодорожное транспортное средство превышает максимальную допустимую скорость. Датчик колеса используют непрерывно для тахометрии, которая менее чувствительна к пробуксовке или к заклиниванию. Действительно, в случае применения тахометрии не происходит никакого аккумулирования допущенной погрешности.
Далее следует описание перерасчета кривой максимальной допустимой скорости в зависимости от времени с использованием пройденного минимального расстояния.
Контроллер вычисляет минимальное положение железнодорожного транспортного средства, то есть пройденное минимальное расстояние. Это пройденное минимальное расстояние используют, чтобы узнать, освободило ли железнодорожное транспортное средство опасный участок или опасную точку, например, чтобы снова повысить скорость после ограничения. На основании значений мгновенной скорости или, в случае необходимости, минимальных значений мгновенной скорости железнодорожного транспортного средства и максимальной мощности торможения можно вывести пройденное минимальное расстояние. На основании этого, как и в случае участка 204 на фиг.5, гарантируют вход в этот участок и возможность ускорения железнодорожного транспортного средства до скорости V2. Если это вычисление не производят, предложенная система задает скорость V1 на всем пути, пока она не пройдет над маяком, показывающим, что она покинула участок 202. Если система определила, что железнодорожное транспортное средство находится на участке 204, она производит перерасчет кривой максимальной допустимой скорости в зависимости от времени и разрешает ускорение до скорости V2.
В варианте осуществления железнодорожному транспортному средству разрешается приблизиться к концу действия предписания движения (EOA - End of movement authority), если оно движется на или ниже скорости освобождения (Vrelease). Скорость освобождения зависит от расстояния между опасной точкой 36 и положением конца действия предписания движения EOA. Например, расстояние между положением ЕОА и опасной точкой выбирают таким образом, чтобы можно было достичь положения EOA на скорости Vrelease, гарантируя при этом остановку в опасной точке, если железнодорожное транспортное средство ошиблось в положении EOA. Расстояние между положением EOA и опасной точкой установлено инфраструктурой, и, следовательно, система сигнализации, как правило, не имеет никакого влияния на это расстояние.
Изобретением предложены система и способ обеспечения безопасности перемещения железнодорожного транспортного средства, характеризующиеся невысокой стоимостью и хорошей эффективностью. Например, можно сохранить совместимость с наземной инфраструктурой, оборудованной для ETCS, и оборудовать подвижный состав в соответствии с последними достижениями и одновременно совмещать поезда, оборудованные системой ETCS, с системой в соответствии с изобретением.
Существуют также другие системы обеспечения безопасности железнодорожного транспортного средства, например, такие системы, при которых железнодорожным транспортным средством управляют, используя непосредственно кривую 210 максимальной допустимой скорости относительно расстояния и сравнивая максимальную допустимую скорость в определенном месте с измеряемой мгновенной скоростью. Эту кривую скорости в зависимости от расстояния 210 вычисляет железнодорожное транспортное средство. Для этих систем обеспечения безопасности железнодорожного транспортного средства, основанных на кривых максимальных допустимых скоростей в зависимости от расстояния, первостепенной является одометрическая функция. В этом случае систему и способ в соответствии с изобретением можно применять для оценки расстояния, которое транспортное средство уже прошло, чтобы пересчитать кривую максимальной допустимой скорости в зависимости от расстояния и его мгновенное положение, используя динамические характеристики железнодорожного транспортного средства.
Изобретение относится к железнодорожным транспортным средствам. В способе обеспечения безопасности перемещения железнодорожного транспортного средства с датчиком скорости вращения колеса и датчиком ускорения, ось чувствительности которого параллельна пути, принимают выходное значение от одного или нескольких датчиков колеса; принимают выходное значение от одного из датчиков ускорения; определяют значение измеренного ускорения на основании выходного значения или выходных значений одного из датчиков ускорения. Используют одно или несколько принятых выходных значений датчика или датчиков колеса для управления железнодорожным транспортным средством в зависимости от сравнения одного или нескольких значений измеренного ускорения с контрольным значением ускорения. Предотвращается проскальзывание колеса. 4 н. и 12 з.п. ф-лы, 8 ил.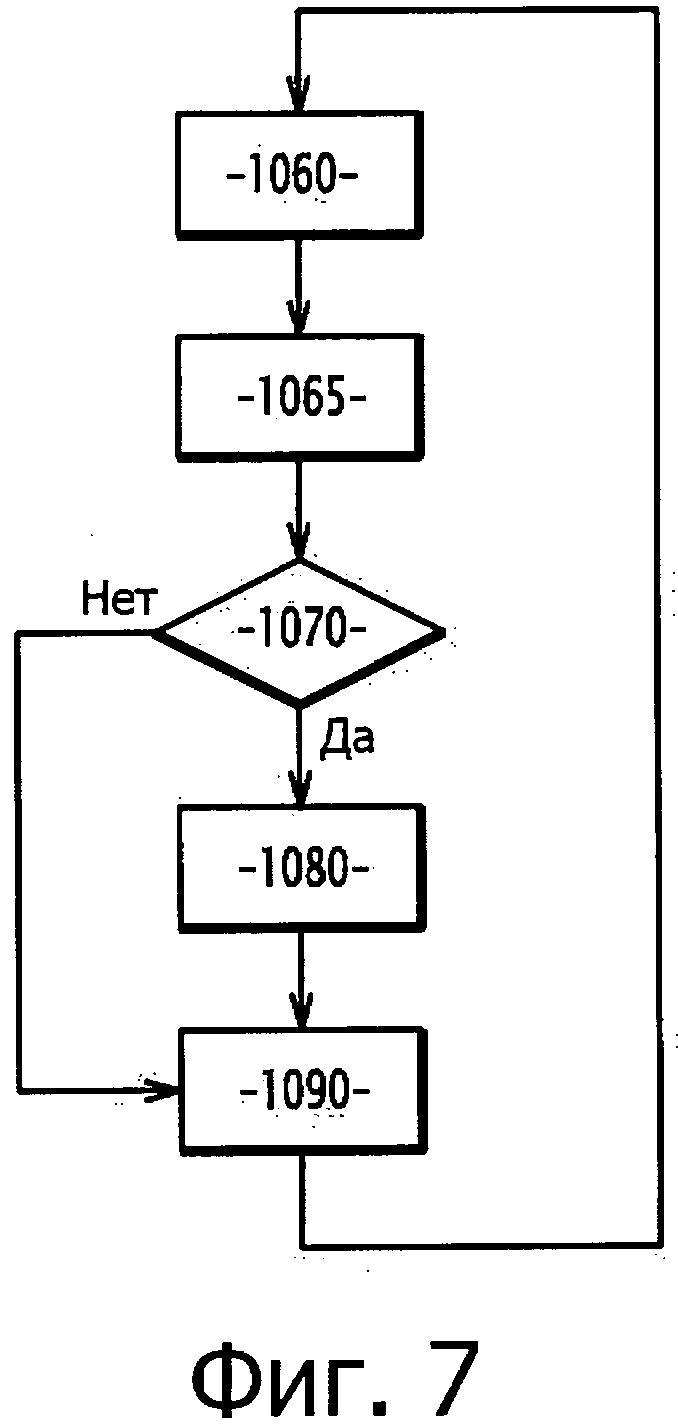
1. Способ обеспечения безопасности перемещения железнодорожного транспортного средства (10), движущегося по железнодорожному пути (11), при этом железнодорожное транспортное средство имеет, по меньшей мере, один датчик (14) колеса, выполненный с возможностью выдачи информации, характеризующей скорость вращения колеса, и, по меньшей мере, один датчик (20) ускорения, ось чувствительности которого параллельна пути (11), при этом способ содержит следующие этапы:
- прием (1060), по меньшей мере, одного выходного значения от одного или нескольких датчиков (14) колеса;
- прием (1065), по меньшей мере, одного выходного значения от одного из датчиков (20) ускорения;
- определение, по меньшей мере, одного значения измеренного ускорения на основании выходного значения или выходных значений одного из датчиков ускорения и
- использование (1070, 1080, 1090) одного или нескольких принятых выходных значений датчика или датчиков колеса для управления железнодорожным транспортным средством в зависимости от сравнения одного или нескольких значений измеренного ускорения, по меньшей мере, с одним контрольным значением ускорения.
2. Способ по п. 1, отличающийся тем, что использование включает в себя определение расстояния, в частности пройденного расстояния, на основании одного или нескольких принятых выходных значений.
3. Способ по п. 1, отличающийся тем, что дополнительно содержит этап определения (1070) по меньшей мере одного надежного значения мгновенной скорости (401) на основании одного или нескольких принятых выходных значений.
4. Способ по п. 2, отличающийся тем, что дополнительно содержит этап определения (1070) по меньшей мере одного надежного значения мгновенной скорости (401) на основании одного или нескольких принятых выходных значений.
5. Способ по одному из п.п. 1-4, отличающийся тем, что использование дополнительно включает в себя этап вычисления (1080) значений максимальной допустимой скорости, в частности кривой (210, 300, 400) максимальной допустимой скорости, основанной на одном или нескольких принятых выходных значениях, в частности, с использованием расстояния, например пройденного расстояния, и/или одного или нескольких надежных значений (401) мгновенной скорости.
6. Способ по п. 5, отличающийся тем, что кривая максимальной допустимой скорости является функцией времени (300) или расстояния (200).
7. Способ по одному из пп. 1-4, 6, отличающийся тем, что использование одного или нескольких принятых выходных значений для управления железнодорожным транспортным средством включает в себя вычисление минимального расстояния и/или максимального расстояния, пройденного железнодорожным транспортным средством (10).
8. Способ по п. 5, отличающийся тем, что использование одного или нескольких принятых выходных значений для управления железнодорожным транспортным средством включает в себя вычисление минимального расстояния и/или максимального расстояния, пройденного железнодорожным транспортным средством (10).
9. Способ по одному из пп. 1-4, 6, 8, отличающийся тем, что управление железнодорожным транспортным средством включает в себя сравнение (1090) мгновенной скорости железнодорожного транспортного средства с максимальной допустимой скоростью и торможение железнодорожного транспортного средства (10) в зависимости от результата сравнения максимальной допустимой скорости с мгновенной скоростью.
10. Способ по п. 5, отличающийся тем, что управление железнодорожным транспортным средством включает в себя сравнение (1090) мгновенной скорости железнодорожного транспортного средства с максимальной допустимой скоростью и торможение железнодорожного транспортного средства (10) в зависимости от результата сравнения максимальной допустимой скорости с мгновенной скоростью.
11. Способ по п. 7, отличающийся тем, что управление железнодорожным транспортным средством включает в себя сравнение (1090) мгновенной скорости железнодорожного транспортного средства с максимальной допустимой скоростью и торможение железнодорожного транспортного средства (10) в зависимости от результата сравнения максимальной допустимой скорости с мгновенной скоростью.
12. Система обеспечения безопасности перемещения железнодорожного транспортного средства (10), содержащего по меньшей мере один датчик (14) колеса, выполненный с возможностью генерирования одного или нескольких выходных значений, характеризующих вращение колеса, по меньшей мере один датчик (20) ускорения, ось чувствительности которого параллельна направлению пути (11), и контроллер (12), соединенный по меньшей мере с одним из датчиков колеса и по меньшей мере с одним из датчиков ускорения, отличающаяся тем, что контроллер выполнен с возможностью использования одного или нескольких принятых выходных значений датчика или датчиков (14) колеса для управления (1070, 1080, 1090) железнодорожным транспортным средством в зависимости от сравнения одного или нескольких значений измеренного ускорения, определенных на основании одного или нескольких выходных значений датчика или датчиков (20) ускорения, по меньшей мере с одним контрольным значением ускорения.
13. Система по п. 12, отличающаяся тем, что контроллер (12) выполнен с возможностью осуществления одного или нескольких этапов способа по одному из пп. 1-11.
14. Контроллер (12), установленный на железнодорожном транспортном средстве для обеспечения его безопасности, при этом контроллер выполнен с возможностью соединения по меньшей мере с одним датчиком колеса, выполненным с возможностью генерирования одного или нескольких выходных значений, характеризующих вращение колеса, и по меньшей мере с одним датчиком (20) ускорения, ось чувствительности которого параллельна направлению пути (11), отличающийся тем, что контроллер (12) выполнен с возможностью использования одного или нескольких принятых выходных значений датчика или датчиков (14) колеса для управления (1070, 1080, 1090) железнодорожным транспортным средством в зависимости от сравнения одного или нескольких значений измеренного ускорения, определенных на основании одного или нескольких выходных значений датчика или датчиков (20) ускорения, по меньшей мере с одним контрольным значением ускорения.
15. Контроллер по п. 14, отличающийся тем, что выполнен с возможностью осуществления одного или нескольких этапов способа по одному из пп. 1-11.
16. Железнодорожное транспортное средство (10), содержащее по меньшей мере один датчик (14) колеса, выполненный с возможностью генерирования одного или нескольких выходных значений, характеризующих вращение колеса, по меньшей мере один датчик (20) ускорения, ось чувствительности которого параллельна направлению пути (11), и контроллер по п. 14 или 15, при этом контроллер соединен по меньшей мере с одним из датчиков колеса и по меньшей мере с одним из датчиков ускорения.
| WO 2009074724 A1, 18.06.2009 | |||
| Преобразователь перемещения в код | 1977 |
|
SU693411A1 |
| US 2005137761 A1, 23.06.2005 | |||
| DE 102005001403 A1, 27.07.2006. | |||

