ПЕРЕКРЕСТНАЯ ССЫЛКА
[0001] Эта заявка претендует на приоритет китайской патентной заявки № 202111469291.5, озаглавленной «A VEHICLE ANTISKID CONTROL METHOD AND SYSTEM, A MOTOR CONTROLLER, AND A STORAGE MEDIUM», поданной 3 декабря 2021 года в Национальное управление интеллектуальной собственности Китая (CNIPA), все содержание которой включено в настоящий документ посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0002] Суть настоящего документа в целом относится к области техники управления транспортным средством, и в частности к способу и системе антиюзового управления транспортного средства, контроллеру двигателя и носителю данных.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
[0003] Мощностные характеристики систем привода гибридного транспортного средства и транспортного средства, работающего на топливе, сильно различаются, по сравнению с двигателями внутреннего сгорания приводной двигатель гибридного транспортного средства имеет характеристики короткого времени отклика, малого момента инерции и широкого диапазона скоростей, что приводит к повышенным требованиям к системе антиюзового управления гибридного транспортного средства в режиме реального времени.
[0004] В существующей стратегии антиюзового управления транспортного средства, когда определяется, что транспортное средство находится в состоянии юза, контроллер транспортного средства обычно получает данные о транспортном средстве, затем вычисляет крутящий момент двигателя в соответствии с данными о транспортном средстве и передает вычисленный крутящий момент двигателя на контроллер двигателя, контроллер двигателя получает крутящий момент двигателя, выполняет управление крутящим моментом, возвращает результат выполнения и продолжает оценку юза. Однако контроллеры обмениваются данными друг с другом через сеть, и при передаче данных возникает задержка связи, когда транспортное средство находится в состоянии юза, крутящий момент двигателя не может быть ограничен во времени, что влияет на производительность в реальном времени антиюзового управления и, таким образом, снижает антиюзовый эффект.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] Предусмотрены способ и система антиюзового управления транспортного средства, контроллер двигателя и носитель данных, для решения проблемы, заключающейся в том, что крутящий момент двигателя не может быть ограничен вовремя, когда транспортное средство находится в состоянии юза, что влияет на эффективность антиюзового управления в реальном времени и, таким образом, снижает антиюзовый эффект.
[0006] Предусмотрен способ антиюзового управления транспортного средства, при этом способ антиюзового управления транспортного средства включает:
[0007] прием запроса на антиюзовое ограничение скорости вращения контроллером двигателя, причем запрос на антиюзовое ограничение скорости вращения содержит максимальную предельную скорость вращения;
[0008] определение того, требуется ли выполнить управление уменьшением крутящего момента на приводном двигателе, в соответствии с максимальной предельной скоростью вращения и фактической скоростью вращения приводного двигателя; и
[0009] в ответ на то, что управление уменьшением крутящего момента на приводном двигателе требуется выполнить, управление крутящим моментом приводного двигателя в замкнутом контуре в соответствии с максимальной предельной скоростью вращения контроллером двигателя.
[0010] Предусмотрен контроллер двигателя, при этом контроллер двигателя содержит:
[0011] модуль приема, выполненный с возможностью принимать запрос на антиюзовое ограничение скорости вращения, при этом запрос на антиюзовое ограничение скорости вращения содержит максимальную предельную скорость вращения;
[0012] модуль определения, выполненный с возможностью определять, требуется ли выполнить управление уменьшением крутящего момента на приводном двигателе, в соответствии с максимальной предельной скоростью вращения и фактической скоростью вращения приводного двигателя; и
[0013] модуль управления, выполненный с возможностью управлять крутящим моментом приводного двигателя в замкнутом контуре в соответствии с максимальной предельной скоростью вращения в ответ на то, что управление уменьшением крутящего момента на приводном двигателе требуется выполнить.
[0014] Предусмотрена система антиюзового управления транспортного средства, при этом система антиюзового управления транспортного средства содержит:
[0015] электронную систему стабилизации кузова транспортного средства, выполненную с возможностью:
[0016] передавать сигнал активации функции тяги и запрос на антиюзовое уменьшение крутящего момента на контроллер транспортного средства после активации функции тяги;
[0017] контроллер транспортного средства, выполненный с возможностью:
[0018] определять, требуется ли выполнить антиюзовое ограничение скорости вращения на приводном двигателе, и определять, требуется ли ограничение крутящего момента приводного двигателя;
[0019] определять максимальную предельную скорость вращения и предельный крутящий момент двигателя приводного двигателя в ответ на то, что на приводном двигателе требуется выполнить антиюзовое ограничение скорости вращения и требуется ограничить крутящий момент приводного двигателя;
[0020] генерировать запрос на антиюзовое ограничение скорости вращения в соответствии с предельным крутящим моментом двигателя и максимальной предельной скоростью вращения и передавать запрос на антиюзовое ограничение скорости вращения на контроллер двигателя; и
[0021] принимать сигнал активации функции тяги и запрос на антиюзовое уменьшение крутящего момента, передаваемые электронной системой стабилизации кузова транспортного средства, генерировать команду отмены ограничения скорости вращения в соответствии с сигналом активации функции тяги и передавать команду отмены ограничения скорости вращения и запрос на антиюзовое уменьшение крутящего момента на контроллер двигателя;
[0022] контроллер двигателя, выполненный с возможностью:
[0023] принимать запрос на антиюзовое ограничение скорости вращения и определять, требуется ли выполнить управление уменьшением крутящего момента на приводном двигателе, в соответствии с максимальной предельной скоростью вращения и фактической скоростью вращения приводного двигателя;
[0024] управлять крутящим моментом приводного двигателя в соответствии с максимальной предельной скоростью вращения в замкнутом контуре в ответ на то, что управление уменьшением крутящего момента на приводном двигателе требуется выполнить; и
[0025] после приема команды отмены ограничения скорости вращения и запроса на антиюзовое уменьшение крутящего момента, деактивировать антиюзовый режим привода в соответствии с командой отмены ограничения скорости вращения и отвечать на запрос на антиюзовое уменьшение крутящего момента.
[0026] Машиночитаемый носитель данных, на котором хранятся команды, которые при исполнении процессором вызывают выполнение процессором способа антиюзового управления транспортного средства.
[0027] В соответствии со способом и системой антиюзового управления транспортного средства, контроллером двигателя и носителем данных, контроллер двигателя принимает запрос на антиюзовое ограничение скорости вращения, передаваемый контроллером транспортного средства, и когда контроллер двигателя принимает запрос на антиюзовое ограничение скорости вращения, контроллер двигателя активирует антиюзовый режим привода, определяет, требуется ли выполнить управление уменьшением крутящего момента на приводном двигателе; если контроллер двигателя определяет, что на приводном двигателе требуется выполнить управление уменьшением крутящего момента, контроллер двигателя выполняет управление в замкнутом контуре над крутящим моментом приводного двигателя в соответствии с максимальной предельной скоростью вращения; в одном варианте осуществления контроллер транспортного средства передает запрос на антиюзовое ограничение скорости вращения на контроллер двигателя и управляет приводным двигателем, чтобы активировать антиюзовый режим привода, в антиюзовом режиме привода контроллер двигателя определяет, требуется ли выполнить управление уменьшением крутящего момента, в соответствии с максимальной предельной скоростью вращения и фактической скоростью вращения, в ходе процесса управления уменьшением крутящего момента, замкнутый контур контроллера двигателя управляет крутящим моментом приводного двигателя, так что крутящий момент приводного двигателя может быть отрегулирован своевременно и точно, улучшая таким образом своевременность и эффективность антиюзового управления транспортного средства, тем самым улучшая антиюзовый эффект.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[0028] Чтобы более четко изложить техническое решение в варианте осуществления настоящего изобретения или известном уровне техники, далее приведено краткое представление графических материалов, которые необходимо использовать в описании варианта осуществления или известного уровня техники; очевидно, что графические материалы, описанные ниже, являются только некоторыми вариантами осуществления настоящего изобретения, для специалистов в данной области техники другие графические материалы также могут быть получены из этих графических материалов без творческих усилий.
[0029] На фиг. 1 представлен схематический структурный вид одного варианта осуществления системы антиюзового управления транспортного средства согласно настоящему изобретению;
[0030] на фиг. 2 представлена блок-схема одного варианта осуществления способа антиюзового управления транспортного средства согласно настоящему изобретению;
[0031] на фиг. 3 представлен схематический вид одного варианта осуществления сигнального взаимодействия способа антиюзового управления транспортного средства согласно настоящему изобретению;
[0032] на фиг. 4 представлен схематический вид изменений рабочих параметров после активации функции тяги транспортного средства согласно предшествующему уровню техники;
[0033] на фиг. 5 представлен схематический вид одного варианта осуществления изменений рабочих параметров после активации функции тяги транспортного средства согласно настоящему изобретению;
[0034] на фиг. 6 представлен схематический структурный вид одного варианта осуществления контроллера двигателя согласно настоящему изобретению;
[0035] на фиг. 7 представлен схематический структурный вид одного варианта осуществления контроллера двигателя или контроллера транспортного средства согласно настоящему изобретению.
ПОДРОБНОЕ ОПИСАНИЕ
[0036] Технические решения в вариантах осуществления настоящего изобретения будут ясно и полностью описаны ниже со ссылками на прилагаемые графические материалы в вариантах осуществления настоящего изобретения, при этом очевидно, что описанные варианты осуществления являются лишь частью, а не всеми вариантами осуществления настоящего изобретения. Согласно вариантам осуществления настоящего изобретения, все другие варианты осуществления, полученные специалистами в данной области техники без приложения творческих усилий, будут попадать в объем правовой охраны настоящего изобретения.
[0037] Способ антиюзового управления транспортного средства, предоставленный данным вариантом осуществления настоящего изобретения, применяется к гибридным транспортным средствам с приводом на два колеса или чисто электрическим транспортным средствам с приводом на два колеса, при этом рабочий режим системы питания чисто электрических транспортных средств является чисто электрическим режимом и может применяться к системе антиюзового управления транспортного средства, как показано на фиг. 1, при этом система антиюзового управления транспортного средства содержит контроллер транспортного средства, контроллер двигателя, приводной двигатель и электронную систему стабилизации кузова транспортного средства. Контроллер двигателя и электронная система стабилизации кузова осуществляют связь с контроллером транспортного средства посредством сети CAN, и контроллер двигателя электрически соединен с приводным двигателем.
[0038] Электронная программа стабилизации кузова транспортного средства (ESP) содержит систему управления тягой (TCS), при этом электронная система стабилизации применяется для передачи сигнала активации функции тяги и запроса на антиюзовое уменьшение крутящего момента на контроллер транспортного средства, когда определено, что функция тяги активирована (т.е. TCS активирована).
[0039] Блок управления транспортным средством (VCU) применяют для определения того, требуется ли антиюзовое ограничение скорости приводного двигателя и требуется ли ограничение крутящего момента приводного двигателя; если требуется антиюзовое ограничение скорости и требуется ограничение крутящего момента приводного двигателя, VCU определяет максимальную предельную скорость вращения приводного двигателя и определяет предельный крутящий момент двигателя; VCU генерирует запрос на антиюзовое ограничение скорости вращения в соответствии с максимальной предельной скоростью вращения и передает запрос на антиюзовое ограничение скорости вращения на контроллер двигателя, так что контроллер двигателя определяет, активировать ли антиюзовый режим привода в соответствии с запросом на антиюзовое ограничение скорости вращения; VCU дополнительно принимает сигнал активации функции тяги и запрос на антиюзовое уменьшение крутящего момента, передаваемый электронной системой стабилизации кузова транспортного средства, генерирует команду отмены ограничения скорости в соответствии с сигналом активации функции тяги и передает команду отмены ограничения скорости и запрос на антиюзовое уменьшение крутящего момента на контроллер двигателя.
[0040] Контроллер двигателя (т.е. интегрированный блок питания, IPU) применяют для определения и приема запроса на антиюзовое ограничение скорости вращения, передаваемого контроллером транспортного средства, и когда IPU принимает запрос на антиюзовое ограничение скорости вращения, IPU активирует антиюзовый режим привода и определяет, требуется ли управление уменьшением крутящего момента приводного двигателя в соответствии с максимальной предельной скоростью вращения и фактической скоростью вращения приводного двигателя; если управление уменьшением крутящего момента приводного двигателя требуется, замкнутый контур IPU управляет крутящим моментом приводного двигателя в соответствии с максимальной предельной скорости вращения; когда IPU принимает команду отмены ограничения скорости и запрос на антиюзовое уменьшение крутящего момента, IPU деактивирует антиюзовый режим привода в соответствии с командой отмены ограничения скорости и отвечает на запрос на антиюзовое уменьшение крутящего момента.
[0041] В одном варианте осуществления контроллер двигателя принимает запрос на антиюзовое ограничение скорости вращения, передаваемый контроллером транспортного средства, и когда контроллер двигателя принимает запрос на антиюзовое ограничение скорости вращения, контроллер двигателя активирует антиюзовый режим привода, определяет, требуется ли выполнить управление уменьшением крутящего момента на приводном двигателе; если контроллер двигателя определяет, что на приводном двигателе должно быть выполнено управление уменьшением крутящего момента, контроллер двигателя управляет крутящим моментом приводного двигателя в замкнутом контуре в соответствии с максимальной предельной скоростью вращения; в одном варианте осуществления контроллер транспортного средства передает запрос на антиюзовое ограничение скорости вращения на контроллер двигателя и управляет приводным двигателем для активации антиюзового режима привода, в антиюзовом режиме привода контроллер двигателя определяет, требуется ли выполнить управление уменьшением крутящего момента в соответствии с максимальной предельной скоростью вращения и фактической скоростью вращения, в процессе управления уменьшением крутящего момента, замкнутый контур контроллера двигателя управляет крутящим моментом приводного двигателя, так что крутящий момент приводного двигателя может быть отрегулирован своевременно и точно, улучшая таким образом своевременность и эффективность антиюзового управления транспортного средства в режиме реального времени, тем самым улучшая антиюзовый эффект.
[0042] В то же время, когда функция TCS электронной системы стабилизации кузова транспортного средства дает сбой или неактивна (т.е. не активирована), контроллер двигателя выполняет управление уменьшением крутящего момента в соответствии с фактической скоростью вращения контроллера двигателя, что улучшает антиюзовое управление транспортного средства в режиме реального времени и обеспечивает устойчивость транспортного средства, и дополнительно решает проблему управляемости транспортных средств с электрическим приводом на низкоскоростных дорогах, когда традиционная функция TCS применяется к транспортным средствам с электрическим приводом.
[0043] Дополнительно, при вождении транспортного средства, если транспортное средство находится в последовательном режиме привода, контроллер транспортного средства определяет предельный крутящий момент двигателя в соответствии с фактической мощностью заряда батареи, фактической генерируемой мощностью двигателя и фактической мощностью разряда приводного двигателя, так что, когда контроллер двигателя определяет, что требуется управление уменьшением крутящего момента приводного двигателя, управляет уменьшением крутящего момента приводного двигателя в соответствии с максимальной предельной скоростью вращения и предельным крутящим моментом двигателя. Состояние батареи и двигателя учитывают во время управления уменьшением крутящего момента, что решает проблему, связанную с тем, что способность антиюзового управления двигателем не учитывают в традиционном способе антиюзового управления, благодаря ограничению емкости батареи обеспечивается адаптируемость этого способа в гибридных транспортных средствах. При условии гарантии, что батарея не перезаряжена, крутящий момент приводного двигателя можно регулировать своевременно и точно, тем самым улучшая своевременность и эффективность антиюзового управления транспортного средства, а также дополнительно улучшая антиюзовый эффект; после активации антиюзового режима привода, когда определено, что функция TCS активирована, антиюзовый режим привода деактивируют, скоростью вращения приводного двигателя не управляют, но приводной двигатель имеет возможность отвечать на запрос на антиюзовое уменьшение крутящего момента от ESP, состояние антиюзового управления транспортным средством полностью находится под управлением ESP, обеспечивая таким образом надежность антиюзового управления транспортным средством.
[0044] Способ антиюзового управления транспортного средства в этом варианте осуществления является стратегией распределенного управления, координируемой и управляемой электронной системой стабилизации кузова транспортного средства (ESP), контроллером транспортного средства (VCU), контроллером двигателя (IPU) и другими контроллерами. VCU определяет максимальную предельную скорость вращения приводного двигателя и передает максимальную предельную скорость вращения на IPU, в это же время VCU вычисляет предельный крутящий момент двигателя приводного двигателя в соответствии с текущим состоянием батареи и состоянием генерирования мощности двигателя, так что IPU может своевременно и точно управлять крутящим моментом приводного двигателя в соответствии с максимальной предельной скоростью вращения и предельным крутящим моментом двигателя, что улучшает производительность антиюзового управления транспортного средства в режиме реального времени; когда функция TCS активирована, максимальная предельная скорость вращения на приводном двигателе отменяется, а приводной двигатель отвечает на запрос на антиюзовое уменьшение крутящего момента от ESP; VCU служит в качестве координационного центра для всей стратегии антиюзового управления, координирует работу каждого контроллера, при этом стратегия антиюзового управления реализуется распределенным способом, при этом каждый контроллер выполняет свои собственные задачи и может в полной мере раскрыть свои преимущества, и сложность разработки является низкой, что не только обеспечивает производительность антиюзового управления транспортного средства в режиме реального времени, но также обеспечивает надежность всей стратегии управления.
[0045] В этом варианте осуществления система антиюзового управления транспортного средства содержит контроллер транспортного средства, контроллер двигателя, электронную систему стабилизации кузова и приводной двигатель, который показан исключительно в иллюстративных целях, в других вариантах осуществления система антиюзового управления транспортного средства может также содержать другие устройства, такие как система управления двигателем (например, EMS), двигатель в сборе и т.д., что не описано подробно.
[0046] В одном варианте осуществления, на фиг. 2 показан способ антиюзового управления транспортного средства, при этом способ применяется к системе антиюзового управления транспортного средства согласно фиг. 1, в качестве примера, при этом способ антиюзового управления транспортного средства включает следующие этапы:
[0047] S10: контроллер двигателя принимает запрос на антиюзовое ограничение скорости вращения.
[0048] Во время вождения транспортного средства контроллер двигателя определяет в режиме реального времени, принял ли он запрос на антиюзовое ограничение скорости вращения, передаваемый контроллером транспортного средства, так чтобы определить, требуется ли выполнение антиюзовой стратегии управления, в соответствии с приемом запроса на антиюзовое ограничение скорости вращения.
[0049] В одном варианте осуществления запрос на антиюзовое ограничение скорости вращения включает максимальную предельную скорость вращения, при этом максимальная предельная скорость вращения является максимальной скоростью приводного двигателя, определенной контроллером транспортного средства в соответствии с данными о транспортном средстве.
[0050] В других вариантах осуществления, если режим управления питанием транспортного средства является последовательным режимом привода, запрос на антиюзовое ограничение скорости вращения дополнительно включает предельный крутящий момент двигателя, так что, когда контроллер двигателя определяет, что крутящий момент приводного двигателя требуется уменьшить, контроллер двигателя управляет крутящим моментом приводного двигателя в замкнутом контуре в соответствии с максимальной предельной скоростью вращения и предельным крутящим моментом двигателя. Предельный крутящий момент двигателя является минимальным крутящим моментом приводного двигателя, определенным контроллером транспортного средства в соответствии с состоянием генерирования мощности батареи транспортного средства, двигателя и других устройств.
[0051] Запрос на антиюзовое ограничение скорости вращения является запросом на ограничение скорости приводного двигателя, генерируемым контроллером транспортного средства после определения того, что транспортное средство может иметь риск юза в текущих рабочих условиях в соответствии с данными о транспортном средстве. Например, когда контроллер транспортного средства обнаруживает, что скорость транспортного средства слишком высока, сцепление с землей низкое и отсутствует вмешательство ESP, может быть риск юза транспортного средства, в это время максимальную предельную скорость вращения вычисляют в соответствии с данными о транспортном средстве для ограничения скорости и крутящего момента приводного двигателя, а затем запрос на антиюзовое ограничение скорости вращения генерируют в соответствии с максимальной предельной скоростью вращения.
[0052] S20: контроллер двигателя определяет, требуется ли выполнить управление уменьшением крутящего момента на приводном двигателе, в соответствии с максимальной предельной скоростью вращения и фактической скоростью вращения приводного двигателя.
[0053] Если контроллер транспортного средства определяет, что был принят запрос на антиюзовое ограничение скорости вращения, контроллер транспортного средства определяет, что транспортное средство может иметь риск юза в текущих рабочих условиях. Для уменьшения риска юза транспортного средства от контроллера двигателя требуется активировать антиюзовый режим привода. В антиюзовом режиме привода контроллер двигателя в режиме реального времени определяет, требуется ли уменьшить крутящий момент приводного двигателя, в соответствии с максимальной предельной скоростью вращения и фактической скоростью вращения приводного двигателя.
[0054] Контроллер двигателя определяет, требуется ли выполнить управление уменьшением крутящего момента на приводном двигателе, в соответствии с максимальной предельной скоростью вращения и фактической скоростью вращения приводного двигателя, посредством: определения контроллером двигателя того, превышает ли фактическая скорость вращения приводного двигателя максимальную предельную скорость вращения; если фактическая скорость вращения приводного двигателя больше максимальной предельной скорости вращения, это указывает на то, что фактическая скорость вращения приводного двигателя превышает ограничение скорости, вычисленное контроллером транспортного средства, риск юза транспортного средства высок и скорость вращения приводного двигателя требуется уменьшить, в это время контроллер двигателя определяет, что крутящий момент приводного двигателя требуется уменьшить, замкнутый контур контроллера двигателя управляет крутящим моментом приводного двигателя в соответствии с максимальной предельной скоростью вращения; если фактическая скорость вращения приводного двигателя меньше либо равна максимальной предельной скорости вращения, это указывает на то, что фактическая скорость вращения приводного двигателя не превышает ограничение скорости, вычисленное контроллером транспортного средства и риск юза транспортное средство низкий, на настоящее время нет необходимости выполнять управление уменьшением крутящего момента на приводном двигателе, в это время контроллер двигателя получает запрос о крутящем моменте транспортного средства, передаваемый контроллером транспортного средства, и отвечает на запрос о крутящем моменте транспортного средства обычно с выдачей требуемого крутящего момента транспортного средства в запросе о крутящем моменте транспортного средства.
[0055] S30: если управление уменьшением крутящего момента на приводном двигателе требуется выполнить, контроллер двигателя управляет крутящим моментом приводного двигателя в замкнутом контуре в соответствии с максимальной предельной скоростью вращения.
[0056] Если управление уменьшением крутящего момента требуется выполнить на приводном двигателе в соответствии с максимальной предельной скоростью вращения и фактической скоростью вращения приводного двигателя, риск юза транспортного средства высок и скорость приводного двигателя требуется уменьшить, тогда контроллер двигателя управляет крутящим моментом приводного двигателя в замкнутом контуре в соответствии с максимальной предельной скоростью вращения.
[0057] Конкретно, контроллер двигателя управляет крутящим моментом приводного двигателя в замкнутом контуре в соответствии с максимальной предельной скоростью вращения, посредством: когда режим работы системы питания транспортного средства является последовательным режимом привода, контроллер двигателя управляет крутящим моментом приводного двигателя в замкнутом контуре в соответствии с максимальной предельной скоростью вращения и предельным крутящим моментом двигателя, таким образом крутящий момент транспортного средства регулируется своевременно и точно, что улучшает своевременность и эффективность антиюзового управления транспортного средства и улучшает антиюзовый эффект; когда рабочий режим системы питания транспортного средства является чисто электрическим режимом привода, контроллер двигателя управляет крутящим моментом приводного двигателя в замкнутом контуре в соответствии с максимальной предельной скоростью вращения и предельным крутящим моментом двигателя, что позволяет исключить перезаряд батареи и своевременно и точно отрегулировать крутящий момент приводного двигателя для улучшения антиюзового эффекта.
[0058] Если требуется выполнить управление уменьшением крутящего момента на приводном двигателе, чтобы предотвратить юз транспортного средства и снизить скорость транспортного средства для уменьшения риска потери управления транспортным средством, необходимо ограничить скорость вращения приводного двигателя в соответствии с максимальной предельной скоростью вращения посредством уменьшения крутящего момента приводного двигателя, обеспечивая, чтобы фактическая скорость вращения приводного двигателя была меньше максимальной предельной скорости вращения; в то же время, когда рабочий режим системы питания транспортного средства является последовательным режимом привода, в процессе ограничения скорости вращения приводного двигателя в соответствии с максимальной предельной скоростью вращения, чтобы предотвратить перезаряд батареи, крутящий момент приводного двигателя также требуется ограничить, избегая таким образом генерирования двигателем слишком большой мощности, когда крутящий момент двигателя слишком низкий, а сгенерированная мощность двигателя еще не была уменьшена, и превышения емкости заряда батареи и в результате перезаряда батареи.
[0059] В одном варианте осуществления контроллер двигателя принимает запрос на антиюзовое ограничение скорости вращения и определяет, необходимо ли выполнить управление уменьшением крутящего момента на приводном двигателе в соответствии с максимальной предельной скоростью вращения и фактической скоростью вращения приводного двигателя; если необходимо выполнить управление уменьшением крутящего момента на приводном двигателе, контроллер двигателя управляет крутящим моментом приводного двигателя в замкнутом контуре в соответствии с максимальной предельной скоростью вращения; контроллер транспортного средства передает запрос на антиюзовое ограничение скорости на контроллер двигателя, контроллер двигателя управляет приводным двигателем для активации антиюзового режима привода, в антиюзовом режиме привода контроллер двигателя определяет, выполнять ли управление уменьшением крутящего момента в соответствии с максимальной предельной скоростью вращения и фактической скоростью вращения, и в процессе управления уменьшением крутящего момента контроллер двигателя управляет крутящим моментом приводного двигателя в замкнутом контуре в соответствии с максимальной предельной скоростью вращения, что может своевременно и точно отрегулировать крутящий момент приводного двигателя, улучшая таким образом своевременность и эффективность антиюзового управления транспортного средства и улучшая антиюзовый эффект.
[0060] В одном варианте осуществления после этапа S30, то есть после приема контроллером двигателя запроса на антиюзовое ограничение скорости вращения, способ дополнительно включает следующие этапы:
[0061] S41: после того, как электронная система стабилизации кузова транспортного средства активирует функцию тяги, электронная система стабилизации кузова транспортного средства передает сигнал активации функции тяги и запрос на антиюзовое уменьшение крутящего момента на контроллер транспортного средства.
[0062] При вождении транспортного средства, в частности после того, как контроллер двигателя принимает запрос на антиюзовое ограничение скорости вращения и активирует антиюзовый режим привода, электронная система стабилизации кузова транспортного средства определяет состояние приводного колеса транспортного средства в соответствии с данными о транспортном средстве и определяет, активировать ли функцию тяги в соответствии с состоянием приводного колеса. Данные о транспортном средстве содержат информацию о скорости колеса, запрос о крутящем моменте на валу привода, раскрытие педали акселератора и другую информацию, электронная система стабилизации кузова транспортного средства определяет, является ли состояние приводного колеса состоянием юза в соответствии с информацией о скорости колеса, запросе о крутящем моменте на валу привода, раскрытии педали акселератора и другой информацией, если состояние приводного колеса является состоянием юза, функцию тяги (т.е. функцию TCS) требуется активировать, так что антиюзовая функция может вмешиваться в управление транспортным средством для предотвращения юза транспортного средства.
[0063] После активации функции тяги электронная система стабилизации кузова транспортного средства передает сигнал активации функции тяги на контроллер транспортного средства. Дополнительно электронная система стабилизации кузова транспортного средства определяет и генерирует запрос на антиюзовое уменьшение крутящего момента в соответствии с фактическими требованиями и передает запрос на антиюзовое уменьшение крутящего момента на контроллер транспортного средства.
[0064] S42: после приема сигнала активации функции тяги и запроса на антиюзовое уменьшение крутящего момента контроллер транспортного средства генерирует команду отмены ограничения скорости в соответствии с сигналом активации функции тяги и передает команду отмены ограничения скорости и запроса на антиюзовое уменьшение крутящего момента на контроллер двигателя.
[0065] После приема сигнала активации функции тяги и запроса на антиюзовое уменьшение крутящего момента контроллер транспортного средства генерирует команду отмены ограничения скорости в соответствии с сигналом активации функции тяги и передает команду отмены ограничения скорости и запрос на антиюзовое уменьшение крутящего момента на контроллер двигателя.
[0066] S43: после приема команды отмены ограничения скорости и запроса на антиюзовое уменьшение крутящего момента контроллер двигателя деактивирует антиюзовый режим привода в соответствии с командой отмены ограничения скорости и отвечает на запрос на антиюзовое уменьшение крутящего момента.
[0067] После приема контроллером двигателя команды отмены ограничения скорости и запроса на антиюзовое уменьшение крутящего момента контроллер двигателя деактивирует антиюзовый режим привода в соответствии с командой отмены ограничения скорости, то есть отменяет максимальную предельную скорость вращения приводного двигателя посредством контроллера транспортного средства, и нет необходимости определять, выполнять ли управление уменьшением крутящего момента на приводном двигателе в соответствии с максимальной предельной скоростью вращения и фактической скоростью вращения, а только отвечает на запрос на антиюзовое уменьшение крутящего момента, передаваемый электронной системой стабилизации кузова транспортного средства через контроллер транспортного средства, и запрос о крутящем моменте транспортного средства, передаваемый контроллером транспортного средства, на основе обеспечения того, что батарея не перезаряжается, состояние антиюзового управления всего транспортного средства полностью переведено на электронную систему стабилизации кузова транспортного средства, обеспечивая таким образом надежность антиюзового управления.
[0068] В одном варианте осуществления, после активации функции тяги, электронная система стабилизации кузова транспортного средства передает сигнал активации функции тяги и запрос на антиюзовое уменьшение крутящего момента на контроллер транспортного средства, после приема контроллером транспортного средства сигнала активации функции тяги и запроса на антиюзовое уменьшение крутящего момента контроллер транспортного средства генерирует команду отмены ограничения скорости в соответствии с сигналом активации функции тяги и передает команду отмены ограничения скорости и запрос на антиюзовое уменьшение крутящего момента на контроллер двигателя; после приема команды отмены ограничения скорости и запроса на антиюзовое уменьшение крутящего момента контроллер двигателя деактивирует антиюзовый режим привода в соответствии с командой отмены ограничения скорости и отвечает на запрос на антиюзовое уменьшение крутящего момента. После деактивации контроллером двигателя антиюзового режима привода, если контроллер транспортного средства определяет, что электронная система стабилизации кузова транспортного средства активирует функцию тяги, контроллер транспортного средства передает команду отмены ограничения скорости и запрос на антиюзовое уменьшение крутящего момента на контроллер двигателя, чтобы управлять деактивацией контроллером двигателя антиюзового режима привода, и отвечает на запрос на антиюзовое уменьшение крутящего момента от электронной системы стабилизации кузова, при этом антиюзовое управление транспортного средства передается на электронную систему стабилизации кузова транспортного средства, обеспечивая таким образом надежность антиюзового управления и избегая конфликтов в управлении, вызываемых стратегией антиюзовой регулировки, так что каждая система в этом варианте осуществления может выполнять свою задачу, что не только обеспечивает производительность антиюзового управления в режиме реального времени, но также обеспечивает надежность антиюзового управления.
[0069] В одном варианте осуществления, после активации функции тяги, электронная система стабилизации кузова транспортного средства генерирует запрос на антиюзовое уменьшение крутящего момента в соответствии с фактическими требованиями и дополнительно прикладывает гидравлическое тормозное усилие к приводным колесам транспортного средства, в то же время передает запрос на антиюзовое уменьшение крутящего момента на контроллер транспортного средства. После активации функции TCS электронной системой стабилизации кузова транспортного средства приводной двигатель генерирует запрос на антиюзовое уменьшение крутящего момента в соответствии с фактическими требованиями, добиваясь таким образом антиюзового управления при вождении транспортного средства посредством приводного двигателя, при этом приводной двигатель дополнительно участвует в выполнении гидравлического торможения для антиюзового управления, обеспечивая таким образом антиюзовый эффект транспортного средства.
[0070] В одном варианте осуществления, после приема контроллером транспортного средства сигнала активации функции тяги и запроса на антиюзовое уменьшение крутящего момента, контроллер транспортного средства генерирует запрос на уменьшение мощности и передает запрос на уменьшение мощности на контроллер двигателя, так что после приема контроллером двигателя запроса на уменьшение мощности контроллер двигателя уменьшает генерируемую двигателем мощность, предотвращая таким образом перезаряд батареи транспортного средства.
[0071] В одном варианте осуществления перед этапом S10, то есть перед определением контроллером двигателя того, принял ли он запрос на антиюзовое ограничение скорости вращения, передаваемый контроллером транспортного средства, способ дополнительно включает следующие этапы:
[0072] S01: контроллер транспортного средства определяет, требуется ли антиюзовое ограничение скорости приводного двигателя и требуется ли ограничение крутящего момента приводного двигателя.
[0073] После запуска контроллера транспортного средства контроллер транспортного средства определяет, требуется ли антиюзовое ограничение скорости приводного двигателя, в соответствии с информацией о передаче транспортного средства и рабочим режимом системы питания. Рабочие режимы системы питания включают чисто электрический режим привода, последовательный режим привода и параллельный режим привода.
[0074] Контроллер транспортного средства определяет, требуется ли антиюзовое ограничение скорости приводного двигателя, в соответствии с информацией о передаче транспортного средства и рабочим режимом системы питания, посредством: определения того, находится ли транспортное средство на заданной передаче, в соответствии с информацией о передаче транспортного средства, при этом заданная передача может отличаться от парковочной передачи и нейтральной передачи, и определения того, является ли рабочий режим системы питания заданным режимом, при этом заданный режим может быть параллельным режимом привода; если транспортное средство находится на заданной передаче и рабочий режим системы питания является заданным режимом, это указывает на то, что транспортное средство может иметь риск юза при вождении, и определения того, что требуется антиюзовое ограничение скорости приводного двигателя; если транспортное средство не находится на заданной передаче или рабочий режим системы питания не является заданным режимом, это указывает на то, что транспортное средство не находится в состоянии вождения, или двигатель непосредственно соединен с цапфой колеса, и нет необходимости ограничивать приводной двигатель, определения того, что антиюзовое ограничение скорости приводного двигателя не требуется.
[0075] Когда транспортное средство находится на определенных передачах (например, парковочная передача P, нейтральная передача N), на цапфе колеса транспортного средства нет питания и транспортное средство не находится в состоянии вождения, в этом случае нет необходимости предотвращать юз и нет необходимости в антиюзовом ограничении скорости приводного двигателя. Когда рабочий режим системы питания транспортного средства относится к определенным режимам (например, параллельный режим привода), двигатель транспортного средства непосредственно соединен с цапфой колеса, в то же время нет необходимости в антиюзовом ограничении скорости приводного двигателя.
[0076] В других вариантах осуществления, после запуска контроллера транспортного средства, контроллер транспортного средства определяет, что требуется антиюзовое ограничение скорости приводного двигателя, в соответствии с информацией о передаче транспортного средства, рабочим режимом системы питания и условием активации функции электронной системы стабилизации кузова транспортного средства в режиме реального времени, если функция тяги в электронной системе стабилизации кузова транспортного средства не активирована, может существовать риск юза, когда транспортное средство находится в состоянии вождения, и требуется антиюзовое ограничение скорости приводного двигателя.
[0077] Контроллер транспортного средства определяет, требуется ли ограничение крутящего момента приводного двигателя, в соответствии с рабочим режимом системы питания, если рабочий режим системы питания является последовательным режимом привода, двигатель может не уменьшать крутящий момент во время процесса уменьшения крутящего момента приводного двигателя, и вызывается генерирование двигателем слишком большого количества электричества, и превышается емкость заряда батареи, дополнительно приводя к перезаряду батареи. Следовательно, для предотвращения перезаряда батареи, требуется ограничение крутящего момента приводного двигателя в ходе процесса уменьшения крутящего момента; если рабочий режим системы питания является чисто электрическим режимом привода, двигатель не работает и нет ситуации, при которой батарея перезаряжена вследствие избыточного генерирования мощности двигателем, тогда нет необходимости в ограничении крутящего момента приводного двигателя в ходе процесса уменьшения крутящего момента приводного двигателя.
[0078] S02: если антиюзовое ограничение скорости и ограничение крутящего момента требуется, контроллер транспортного средства определяет максимальную предельную скорость вращения приводного двигателя и определяет предельный крутящий момент двигателя.
[0079] После того как контроллер транспортного средства определяет, необходимо ли антиюзовое ограничение скорости приводного двигателя, в соответствии с информацией о передаче транспортного средства и рабочим режимом системы питания, если антиюзовое ограничение скорости приводного двигателя необходимо, это указывает на то, что транспортное средство находится в состоянии вождения и существует риск юза транспортного средства, тогда контроллер транспортного средства определяет максимальную предельную скорость вращения приводного двигателя в соответствии с информацией о скорости колеса и углом поворота рулевого колеса. Если крутящий момент приводного двигателя требуется ограничить, контроллер транспортного средства определяет предельный крутящий момент двигателя.
[0080] После определения того, требуется ли антиюзовое ограничение скорости приводного двигателя и требуется ли ограничение крутящего момента приводного двигателя, если антиюзовое ограничение скорости приводного двигателя требуется, но ограничение крутящего момента приводного двигателя не требуется, контроллер транспортного средства определяет максимальную предельную скорость вращения двигателя, генерирует запрос на антиюзовое ограничение скорости вращения в соответствии с максимальной предельной скоростью вращения и передает запрос на антиюзовое ограничение скорости вращения на контроллер двигателя.
[0081] Контроллер транспортного средства определяет максимальную предельную скорость вращения приводного двигателя в соответствии с информацией о скорости колеса и углом поворота рулевого колеса посредством: определения целевой скорости приводного вала транспортного средства в соответствии с информацией о скорости колеса и углом поворота рулевого колеса, и вычисления максимальной предельной скорости в соответствии с целевой скоростью приводного вала транспортного средства, передаточным числом от приводного двигателя до цапфы колеса и радиусом шин колеса.
[0082] Максимальную предельную скорость вычисляют по следующей формуле:
[0083] 
[0084] В формуле Vmax - максимальная предельная скорость вращения приводного двигателя, Vtar - целевая скорость приводного вала транспортного средства, M - передаточное число от приводного двигателя до цапфы колеса и R - радиус шины колеса.
[0085] В одном варианте осуществления контроллер транспортного средства определяет предельный крутящий момент двигателя в соответствии с фактической мощностью заряда батареи, фактическим генерированием мощности двигателя и фактической мощностью разряда приводного двигателя, в силу воздействия генерирования мощности двигателя и разряда приводного двигателя на емкость батареи, когда приводной двигатель выполняет управление уменьшением крутящего момента, крутящий момент при уменьшении крутящего момента ограничен для предотвращения перезаряда батареи. В других вариантах осуществления предельный крутящий момент двигателя может быть откалиброванным крутящим моментом или может быть крутящим моментом, вычисленным другими способами, что не будет описано.
[0086] Контроллер транспортного средства определяет предельный крутящий момент двигателя в соответствии с фактической мощностью заряда батареи, фактическим генерированием мощности двигателя и фактической мощностью разряда приводного двигателя посредством: определения контроллером транспортного средства доступной мощности приводного двигателя при уменьшении крутящего момента в соответствии с фактической мощностью заряда батареи, фактической генерируемой мощностью двигателя и фактической мощностью разряда приводного двигателя, и определения контроллером транспортного средства предельного крутящего момента двигателя в соответствии с фактической скоростью вращения приводного двигателя и доступной мощностью при уменьшении крутящего момента.
[0087] Предельный крутящий момент двигателя вычисляют по следующей формуле:
[0088] 
[0089] В формуле Tmin - это предельный крутящий момент двигателя, Wm - это доступная мощность приводного двигателя при уменьшении крутящего момента и Vr - это фактическая скорость вращения приводного двигателя.
[0090] Доступная мощность приводного двигателя при уменьшении крутящего момента вычисляют по следующей формуле:
[0091] 
[0092] В формуле Wc - это фактическая мощность заряда батареи, Wd - это фактическая мощность разряда приводного двигателя и We - это фактическое генерирование мощности двигателя.
[0093] Тогда предельный крутящий момент двигателя вычисляют по следующей формуле:
[0094] 
[0095] В формуле Tmin - это предельный крутящий момент двигателя, Wc - это фактическая мощность заряда батареи, Wd - это фактическая мощность разряда приводного двигателя, We - это фактическое генерирование мощности двигателя и Vr - это фактическая скорость вращения приводного двигателя.
[0096] S03: контроллер транспортного средства генерирует запрос на антиюзовое ограничение скорости вращения в соответствии с предельным крутящим моментом двигателя и максимальной предельной скоростью вращения и передает запрос на антиюзовое ограничение скорости вращения на контроллер двигателя.
[0097] После определения ограничения крутящего момента двигателя и максимальной предельной скорости вращения приводного двигателя контроллер транспортного средства генерирует запрос на антиюзовое ограничение скорости вращения в соответствии с ограничением крутящего момента двигателя и максимальной предельной скоростью вращения и передает запрос на антиюзовое ограничение скорости вращения на контроллер двигателя, так что контроллер двигателя активирует антиюзовый режим привода после приема запроса на антиюзовое ограничение скорости вращения, чтобы определять, требуется ли уменьшение крутящего момента приводного двигателя, в соответствии с фактической скоростью вращения приводного двигателя.
[0098] В одном варианте осуществления, перед определением контроллером двигателя того, принимает ли он запрос на антиюзовое ограничение скорости вращения, передаваемый контроллером транспортного средства, контроллер транспортного средства определяет, требуется ли антиюзовое ограничение скорости приводного двигателя, и определяет, необходимо ли ограничение крутящего момента приводного двигателя; если антиюзовое ограничение скорости и ограничение крутящего момента требуются, контроллер транспортного средства определяет максимальную предельную скорость вращения приводного двигателя и определяет предельный крутящий момент двигателя; контроллер транспортного средства генерирует антиюзовое ограничение скорости в соответствии с предельным крутящим моментом двигателя и максимальной предельной скоростью вращения и передает запрос на антиюзовое ограничение скорости вращения на контроллер двигателя, который уточняет процесс определения предельного крутящего момента двигателя и максимальной предельной скорости вращения, контроллер транспортного средства вычисляет предельный крутящий момент двигателя и максимальную предельную скорость вращения, что может уменьшить объем обработки информации контроллера двигателя, уменьшая таким образом нагрузку на контроллер двигателя, улучшая скорость отклика контроллера двигателя и улучшая производительность в режиме реального времени управления приводного двигателя.
[0099] В одном варианте осуществления, на фиг. 3 показан способ антиюзового управления транспортного средства, при этом способ применяется к системе антиюзового управления транспортного средства согласно фиг. 1, в качестве примера, при этом способ включает следующие этапы:
[00100] S1: контроллер транспортного средства определяет, требуется ли антиюзовое ограничение скорости приводного двигателя и требуется ли ограничение крутящего момента приводного двигателя.
[00101] После запуска контроллера транспортного средства контроллер транспортного средства определяет, требуется ли антиюзовое ограничение скорости приводного двигателя, в соответствии с информацией о передаче транспортного средства и рабочим режимом системы питания и определяет, требуется ли ограничение крутящего момента приводного двигателя, в соответствии с рабочим режимом системы питания. Подробный процесс определения приведен выше и не будет повторяться.
[00102] S2: если требуется антиюзовое ограничение скорости и требуется ограничение крутящего момента, контроллер транспортного средства определяет максимальную предельную скорость вращения приводного двигателя и определяет предельный крутящий момент двигателя.
[00103] После того как контроллер транспортного средства определяет то, требуется ли антиюзовое ограничение скорости приводного двигателя, в соответствии с информацией о передаче транспортного средства и рабочим режимом системы питания, если антиюзовое ограничение скорости приводного двигателя требуется, это указывает на то, что транспортное средство находится в состоянии вождения и существует риск юза транспортного средства, контроллер транспортного средства определяет максимальную предельную скорость вращения приводного двигателя в соответствии с информацией о скорости колеса и углом поворота рулевого колеса и определяет предельный крутящий момент двигателя в соответствии с фактической мощностью заряда батареи, фактической генерируемой мощностью двигателя и фактической мощностью разряда приводного двигателя.
[00104] Процесс определения максимальной предельной скорости приводного двигателя и предельного крутящего момента двигателя описан выше и не будет повторяться.
[00105] S3: контроллер транспортного средства генерирует запрос на антиюзовое ограничение скорости вращения в соответствии с предельным крутящим моментом двигателя и максимальной предельной скоростью вращения и передает запрос на антиюзовое ограничение скорости вращения на контроллер двигателя.
[00106] После определения предельного крутящего момента двигателя и максимальной предельной скорости вращения приводного двигателя контроллер транспортного средства генерирует запрос на антиюзовое ограничение скорости вращения в соответствии с предельным крутящим моментом двигателя и максимальной предельной скоростью вращения и передает запрос на антиюзовое ограничение скорости вращения на контроллер двигателя.
[00107] S4: после приема запроса на антиюзовое ограничение скорости вращения контроллер двигателя активирует антиюзовый режим привода и определяет, требуется ли выполнить управление уменьшением крутящего момента на приводном двигателе, в соответствии с максимальной предельной скоростью вращения и фактической скоростью вращения приводного двигателя.
[00108] После приема запроса на антиюзовое ограничение скорости вращения контроллер двигателя активирует антиюзовый режим привода и определяет, требуется ли выполнить управление уменьшением крутящего момента на приводном двигателе, в соответствии с максимальной предельной скоростью вращения и фактической скоростью вращения приводного двигателя.
[00109] Контроллер двигателя определяет, требуется ли выполнить управление уменьшением крутящего момента на приводном двигателе, в соответствии с максимальной предельной скоростью вращения и фактической скоростью вращения приводного двигателя, посредством: определения контроллером двигателя того, превышает ли фактическая скорость вращения приводного двигателя максимальную предельную скорость вращения; если фактическая скорость вращения приводного двигателя больше максимальной предельной скорости вращения, это указывает на то, что фактическая скорость вращения приводного двигателя превышает ограничение скорости, вычисленное контроллером транспортного средства, и риск юза транспортного средства высок, и скорость вращения приводного двигателя требуется уменьшить, в это время контроллер двигателя определяет, что крутящий момент приводного двигателя требуется уменьшить; если фактическая скорость вращения приводного двигателя меньше либо равна максимальной предельной скорости вращения, это указывает на то, что фактическая скорость вращения приводного двигателя не превышает ограничение скорости, вычисленное контроллером транспортного средства, и риск юза транспортного средства низкий, на настоящее время нет необходимости выполнять управление уменьшением крутящего момента на приводном двигателе.
[00110] S5: если управление уменьшением крутящего момента на приводном двигателе требуется выполнить, контроллер двигателя управляет крутящим моментом приводного двигателя в замкнутом контуре в соответствии с максимальной предельной скоростью вращения и предельным крутящим моментом двигателя.
[00111] Если контроллер двигателя определяет, что на приводном двигателе требуется выполнить управление уменьшением крутящего момента, контроллер двигателя управляет крутящим моментом приводного двигателя в замкнутом контуре в соответствии с максимальной предельной скоростью вращения и предельным крутящим моментом двигателя; если управление уменьшением крутящего момента не требуется выполнять на приводном двигателе, контроллер двигателя получает запрос о крутящем моменте транспортного средства, передаваемый контроллером транспортного средства, и обычно отвечает на запрос о крутящем моменте транспортного средства с выдачей требуемого крутящего момента транспортного средства в запросе о крутящем моменте транспортного средства.
[00112] S6: электронная система стабилизации кузова транспортного средства определяет в режиме реального времени, требуется ли активация функции тяги.
[00113] При вождении транспортного средства, в частности после активации контроллером двигателя антиюзового режима привода, электронная система стабилизации кузова транспортного средства определяет состояние приводного колеса транспортного средство в режиме реального времени в соответствии с данными о транспортном средстве и определяет, требуется ли активация функции тяги, в соответствии с состоянием приводного колеса. Если состояние приводного колеса находится в состоянии юза, требуется вмешательство системы управления тягой и требуется активация функции тяги, и напротив, если приводное колесо не находится в состоянии юза, вмешательство системы управления тягой не требуется и не требуется активация функции тяги.
[00114] S7: если активация функции тяги требуется, электронная система стабилизации кузова транспортного средства активирует функцию тяги, генерирует запрос на антиюзовое уменьшение крутящего момента в соответствии с фактическими требованиями и передает сигнал активации функции тяги и запрос на антиюзовое уменьшение крутящего момента на контроллер транспортного средства.
[00115] После того как электронная система стабилизации кузова транспортного средства определяет в режиме реального времени то, требуется ли активация функции тяги, если активация функции тяги требуется, электронная система стабилизации кузова транспортного средства активирует функцию тяги, генерирует запрос на антиюзовое уменьшение крутящего момента в соответствии с фактическими требованиями и прикладывает гидравлическое тормозное усилие к приводным колесам; во время активации функции тяги сигнал активации функции тяги своевременно передается на контроллер транспортного средства, после того как запрос на антиюзовое уменьшение крутящего момента генерируется в соответствии с фактическими требованиями, запрос на антиюзовое уменьшение крутящего момента также передается на контроллер транспортного средства в режиме реального времени.
[00116] S8: после приема сигнала активации функции тяги и запроса на антиюзовое уменьшение крутящего момента контроллер транспортного средства генерирует команду отмены ограничения скорости вращения в соответствии с сигналом активации функции тяги и передает команду отмены ограничения скорости и запрос на антиюзовое уменьшение крутящего момента на контроллер двигателя.
[00117] После приема сигнала активации функции тяги контроллер транспортного средства генерирует команду отмены ограничения скорости в соответствии с сигналом активации функции тяги, после приема запроса на антиюзовое уменьшение крутящего момента, контроллер транспортного средства передает команду отмены ограничения скорости и запрос на антиюзовое уменьшение крутящего момента на контроллер двигателя.
[00118] S9: после того как контроллер двигателя принимает команду отмены ограничения скорости и запрос на антиюзовое уменьшение крутящего момента, контроллер двигателя деактивирует антиюзовый режим привода в соответствии с командой отмены ограничения скорости и отвечает на запрос на антиюзовое уменьшение крутящего момента.
[00119] После того как контроллер двигателя принимает команду отмены ограничения скорости и запрос на антиюзовое уменьшение крутящего момента, контроллер двигателя деактивирует антиюзовый режим привода в соответствии с командой отмены ограничения скорости и отвечает на запрос на антиюзовое уменьшение крутящего момента, то есть контроллер двигателя отменяет максимальную предельную скорость вращения приводного двигателя посредством контроллера транспортного средства, нет необходимости определять, требуется ли выполнение управления уменьшением крутящего момента на приводном двигателе, в соответствии с максимальной предельной скоростью вращения и фактической скоростью вращения приводного двигателя, а только отвечают на запрос на антиюзовое уменьшение крутящего момента, передаваемый электронной системой стабилизации кузова транспортного средства через контроллер транспортного средства, и запрос о крутящем моменте транспортного средства, передаваемый контроллером транспортного средства, на основе обеспечения отсутствия перезаряда батареи, состояние антиюзового управления всего транспортного средства полностью передано на электронную систему стабилизации кузова транспортного средства для обеспечения надежности антиюзового управления.
[00120] Способ антиюзового управления транспортного средства в этом варианте осуществления является стратегией распределенного управления, координируемой и управляемой электронной системой стабилизации кузова транспортного средства (ESP), контроллером транспортного средства (VCU), контроллером двигателя (IPU) и другими контроллерами. VCU определяет максимальную предельную скорость вращения приводного двигателя и передает максимальную предельную скорость вращения на IPU, в это же время VCU вычисляет предельный крутящий момент двигателя приводного двигателя в соответствии с текущим состоянием батареи и состоянием генерирования мощности двигателя, так что IPU может своевременно и точно управлять крутящим моментом приводного двигателя в соответствии с максимальной предельной скоростью вращения и предельным крутящим моментом двигателя, что улучшает производительность антиюзового управления транспортного средства в режиме реального времени; когда функция TCS активирована, максимальная предельная скорость вращения на приводном двигателе отменяется, а приводной двигатель отвечает на запрос на антиюзовое уменьшение крутящего момента от ESP; VCU служит в качестве координационного центра для всей стратегии антиюзового управления, координирует работу каждого контроллера, при этом стратегия антиюзового управления реализуется распределенным способом, при этом каждый контроллер выполняет свои собственные задачи и может в полной мере раскрыть свои преимущества, и сложность разработки является низкой, что не только обеспечивает производительность антиюзового управления транспортного средства в режиме реального времени, но также обеспечивает надежность всей стратегии управления.
[00121] Когда способ антиюзового управления транспортного средства, предоставленный в этом варианте осуществления, не применяется, после активации функции TCS и отдельного управления ею в традиционном антиюзовом управлении транспортного средства, рабочие параметры транспортного средства изменяются так, как показано на фиг. 4. Когда применяется способ антиюзового управления транспортного средства, предоставленный в этом варианте осуществления, после выполнения контроллерами координированного управления, рабочие параметры транспортного средства изменяются так, как показано на фиг. 5. Горизонтальная ось на фиг. 4 и 5 - время (мин - минуты, с - секунды), а вертикальная ось на фиг. 4 и 5 - скорость вращения или ускорение, фиг. 4 и 5 показывают продольное ускорение транспортного средства с течением времени, скорость вращения приводного двигателя и скорость заднего колеса как функцию фактического изменения. Сравнивая фиг. 4 и 5, можно видеть, что за счет применения способа антиюзового управления транспортного средства, предусмотренного в этом варианте осуществления, после того, как контроллер выполняет координированное управление, скачок скорости колес транспортного средства значительно подавляется, что может эффективно улучшить противоюзовый эффект и улучшить управляемость на дорожном покрытии с низким сцеплением.
[00122] В одном варианте осуществления на этапе S1 или этапе S01 определение контроллером транспортного средства того, требуется ли антиюзовое ограничение скорости приводного двигателя, включает следующие этапы:
[00123] S11: контроллер транспортного средства определяет, является ли рабочий режим системы питания заданным режимом.
[00124] При вождении транспортного средства контроллер транспортного средства получает данные о транспортном средстве, такие как рабочий режим системы питания, информация о передаче и условие активации функции электронной системы стабилизации кузова транспортного средства. После получения рабочего режима системы питания контроллер транспортного средства определяет, является ли рабочий режим системы питания заданным режимом. Заданный режим является чисто электрическим режимом привода или последовательным режимом привода.
[00125] S12: если рабочий режим системы питания является заданным режимом, контроллер транспортного средства определяет, находится ли транспортное средство на заданной передаче, в соответствии с информацией о передаче.
[00126] После определения того, является ли рабочий режим системы питания заданным режимом, если контроллер транспортного средства определяет, что рабочий режим системы питания является заданным режимом, это указывает на то, что двигатель не соединен непосредственно с цапфой колеса, контроллер транспортного средства определяет, находится ли транспортное средство на заданной передаче, в соответствии с информацией о передаче. Заданная передача может быть любой передачей, кроме парковочной передачи (передача P) и нейтральной передачи (передача N).
[00127] S13: если транспортное средство находится на заданной передаче, контроллер транспортного средства определяет, активирована ли функция тяги, в соответствии с условием активации функции электронной системы стабилизации кузова транспортного средства.
[00128] После определения того, находится ли транспортное средство на заданной передаче, в соответствии с информацией о передаче, если контроллер транспортного средства определяет, что транспортное средство находится на заданной передаче, это указывает, что транспортное средство находится в состоянии вождения, контроллер транспортного средства определяет, активирована ли функция тяги, в соответствии с условием активации функции электронной системы стабилизации кузова транспортного средства.
[00129] S14: если функция тяги не активирована, контроллер транспортного средства определяет, что требуется антиюзовое ограничение скорости приводного двигателя.
[00130] После определения того, активирована ли функция тяги, в соответствии с условием активации функции электронной системы стабилизации кузова транспортного средства, если контроллер транспортного средства определяет, что функция тяги не активирована, это указывает на то, что двигатель не соединен непосредственно с цапфой колеса, транспортное средство находится в состоянии вождения, и нет вмешательства в управление тягой, в это время транспортное средство имеет риск юза и необходимо ограничить крутящий момент и скорость приводного двигателя. Контроллер транспортного средства определяет, что требуется антиюзовое ограничение скорости приводного двигателя, обеспечивая таким образом точное антиюзовое управление транспортного средства и предотвращая юз транспортного средства.
[00131] В одном варианте осуществления контроллер транспортного средства определяет, является ли рабочий режим системы питания заданным режимом; если рабочий режим системы питания является заданным режимом, контроллер транспортного средства определяет, находится ли транспортное средство на заданной передаче, в соответствии с информацией о передаче; если транспортное средство находится на заданной передаче, контроллер транспортного средства определяет, активирована ли функция тяги, в соответствии с условием активации функции электронной системы стабилизации кузова транспортного средства; если функция тяги не активирована, контроллер транспортного средства определяет, что требуется антиюзовое ограничение скорости приводного двигателя, что уточняет конкретные этапы определения того, требуется ли антиюзовое ограничение скорости на приводном двигателе, обеспечивает точность структуры антиюзового ограничения скорости и снижает вероятность плохих нагрузки и мощности системы, вызванных частым антиюзовым ограничением скорости на приводном двигателе.
[00132] В одном варианте осуществления на этапе S2 или этапе S02 определение контроллером транспортного средства максимальной предельной скорости вращения приводного двигателя включает следующие этапы:
[00133] S21: контроллер транспортного средства определяет эталонную скорость транспортного средства, коррекционное значение разницы скоростей колес и значение безопасного смещения скорости в соответствии с информацией о скорости колес и углом поворота рулевого колеса транспортного средства.
[00134] При вождении транспортного средства контроллер транспортного средства получает данные о транспортном средстве в режиме реального времени, данные о транспортном средстве дополнительно включают информацию о скорости колес и угол поворота рулевого колеса. После определения того, что требуется антиюзовое ограничение скорости приводного двигателя, в соответствии с информацией о передаче транспортного средства и рабочим режимом системы питания, контроллер транспортного средства определяет эталонную скорость транспортного средства, коррекционное значение разницы скоростей колес и значение безопасного смещения скорости. Эталонная скорость транспортного средства является эталонной скоростью транспортного средства переднего вала, вычисляемой, когда передняя часть не находится в состоянии юза, на основе заднего колеса транспортного средства, и добавляют коррекцию рулевого колеса, то есть среднюю скорость колеса корректируют в соответствии с соотношением между углом поворота рулевого колеса и углом поворота переднего колеса. По сравнению с традиционным способом антиюзового управления транспортного средства, который получает информацию о скорости колес, когда транспортное средство находится в состоянии юза, для вычисления целевой скорости приводного двигателя, в этом варианте осуществления эталонную скорость транспортного средства вычисляют в соответствии со средней скоростью колес для задних колес транспортного средства, когда передние колеса не находятся в состоянии юза, при этом разница скоростей колес, сгенерированная, когда транспортное средство поворачивает, обычно может быть исключена и точность вычисления эталонной скорости транспортного средства может быть улучшена.
[00135] Значение безопасного смещения скорости транспортного средства в этом варианте осуществления является безопасной граничной скоростью, соответствующей текущей эталонной скорости транспортного средства. Поскольку вычисленная эталонная скорость транспортного средства является теоретическим значением, а фактическая скорость транспортного средства часто до определенной степени отклоняется от эталонной скорости транспортного средства и колеблется вверх и вниз, с целью предотвращения частого включения и выключения антиюзового режима привода необходимо установить безопасную границу для эталонной скорости транспортного средства, то есть установить значение безопасного смещения скорости транспортного средства для коррекции эталонной скорости транспортного средства.
[00136] При вождении транспортного средства, если транспортное средство находится в состоянии юза на разделенной дороге (т.е. коэффициенты сцепления с дорогой левого и правого колес транспортного средства отличаются), приводной вал транспортного средства не может эффективно использовать сцепление стороны с высоким сцеплением для выдачи приводящего усилия для приведения в движение транспортного средства, и ESP накладывает механическое торможение на сторону с низким сцеплением для обеспечения достаточного приводящего усилия для приводного вала. Однако, когда функция ESP активирована или когда начальная скорость приводного двигателя, вычисленная посредством VCU, ограничивает разницу скоростей колес на цапфе колеса до небольшого диапазона на разделенной дороге, ESP может не иметь возможности применить механическое торможение и быть не в состоянии обеспечить достаточное приводящее усилие для приводного вала. Поэтому, с целью эффективного использования сцепления на продольной стороне с высоким сцеплением, необходимо наложить разницу скоростей колес, вызванную юзом приводного колеса, на основе эталонной скорости транспортного средства для коррекции эталонной скорости транспортного средства, таким образом корректируется эталонная скорость транспортного средства, коррекционная разница скоростей колес является коррекционным значением разницы скоростей колес.
[00137] S22: контроллер транспортного средства определяет сумму эталонной скорости транспортного средства, коррекционного значения разницы скоростей колес и значения безопасного смещения скорости транспортного средства в качестве целевой скорости приводного вала транспортного средства.
[00138] После определения эталонной скорости транспортного средства, коррекционного значения разницы скоростей колес и значения безопасного смещения скорости транспортного средства контроллер транспортного средства непосредственно определяет сумму эталонной скорости транспортного средства, коррекционного значения разницы скоростей колес и значения безопасного смещения скорости транспортного средства в качестве целевой скорости приводного вала транспортного средства.
[00139] S23: контроллер транспортного средства вычисляет максимальную предельную скорость вращения путем выполнения преобразования передаточного числа в отношении целевой скорости приводного вала транспортного средства.
[00140] После определения целевой скорости приводного вала транспортного средства контроллер транспортного средства вычисляет максимальную предельную скорость вращения путем выполнения преобразования передаточного числа в отношении целевой скорости приводного вала транспортного средства, то есть контроллер транспортного средства вычисляет максимальную предельную скорость вращения в соответствии с целевой скоростью приводного вала, передаточным числом от приводного двигателя до цапфы колеса и радиусом шины колеса.
[00141] Максимальную предельную скорость вычисляют по следующей формуле:
[00142] 
[00143] В формуле Vmax - это максимальная предельная скорость вращения приводного двигателя, Vtar - это целевая скорость приводного вала транспортного средства, M - это передаточное число от приводного двигателя до цапфы колеса и R - это радиус шины колеса.
[00144] В других вариантах осуществления эталонная скорость транспортного средства также может быть непосредственно определена как целевая скорость приводного вала транспортного средства, или сумма эталонной скорости транспортного средства и коррекционного значения разницы скоростей колес может быть определена как целевая скорость приводного вала транспортного средства, или сумма эталонной скорости транспортного средства и значения безопасного смещения скорости транспортного средства может быть определена как целевая скорость приводного вала транспортного средства.
[00145] Затем максимальную предельную скорость вращения вычисляют в соответствии с целевой скоростью приводного вала транспортного средства, передаточным числом от приводного двигателя до цапфы колеса и радиусом шины колеса. В этом варианте осуществления эталонную скорость транспортного средства корректируют посредством коррекционного значения разницы скоростей колес, что решает проблему юза транспортного средства с приводом на два колеса с одной стороны на противоположной дорожной полосе в традиционном способе антиюзового управления транспортного средства и улучшает точность вычисленной целевой скорости приводного вала транспортного средства; эталонную скорость транспортного средства корректируют посредством значения безопасного смещения скорости, что учитывает отклонение между вычисленной эталонной скоростью транспортного средства и фактической скоростью вращения и улучшает точность вычисленной целевой скорости приводного вала.
[00146] В этом варианте осуществления контроллер транспортного средства определяет эталонную скорость транспортного средства, коррекционное значение разницы скоростей колес и значение безопасного смещения скорости в соответствии с информацией о скорости колес и углом поворота рулевого колеса транспортного средства, а затем определяет сумму эталонной скорости транспортного средства, коррекционного значения разницы скоростей колес и значения безопасного смещения скорости транспортного средства как целевую скорость приводного вала транспортного средства. Контроллер транспортного средства дополнительно выполняет преобразование передаточного числа в отношении целевой скорости приводного вала транспортного средства для вычисления максимальной предельной скорости вращения. Вычисление максимальной предельной скорости вращения относится к информации о фактической скорости колес, состояние транспортного средства может быть определено более точно, в то же время, эталонную скорость транспортного средства корректируют в соответствии с коррекционным значением разницы скоростей колес и значением безопасного смещения скорости транспортного средства, может быть получена более точная целевая скорость приводного вала транспортного средства, с получением таким образом точной максимальной предельной скорости вращения, что обеспечивает основание для последующего точного антиюзового управления приводного двигателя.
[00147] В одном варианте осуществления, на этапе S21, определение контроллером транспортного средства эталонной скорости транспортного средства, коррекционного значения разницы скоростей колес и значения безопасного смещения скорости транспортного средства в соответствии с информацией о скорости колес и углом поворота рулевого колеса включает следующие этапы:
[00148] S211: контроллер транспортного средства определяет угол поворота цапфы колеса у переднего колеса транспортного средства в соответствии с углом поворота рулевого колеса и заданными данными об угле поворота цапфы колеса.
[00149] После получения угла поворота рулевого колеса контроллер транспортного средства определяет угол поворота цапфы колеса у переднего колеса в соответствии с углом поворота рулевого колеса и заданными данными об угле поворота цапфы колеса. В том числе, заданные данные об угле поворота цапфы колеса содержат угол поворота цапфы колеса, соответствующий каждому из совокупности разных углов поворота рулевого колеса.
[00150] Следует понимать, что существует соответствующее соотношение между углом поворота рулевого колеса транспортного средства и углом поворота цапфы колеса каждого колеса транспортного средства. В этом варианте осуществления посредством испытаний транспортного средства, на транспортных средствах разных моделей, транспортное средство каждой модели получают при разных углах поворота рулевого колеса, угол поворота цапфы колеса для каждого колеса суммируют в заданные данные об угле поворота цапфы колеса транспортного средства каждого типа и заранее сохраняют в памяти транспортного средства соответствующего типа транспортного средства для дальнейшего непосредственного использования.
[00151] При вождении транспортного средства, после того как контроллер транспортного средства получает угол поворота рулевого колеса, в заданных данных об угле поворота цапфы колеса непосредственно ищут угол поворота цапфы колеса для переднего колеса, соответствующий углу поворота рулевого колеса в соответствии с углом поворота рулевого колеса. Угол поворота цапфы переднего колеса включает угол поворота цапфы левого переднего колеса и угол поворота цапфы правого переднего колеса.
[00152] S212: контроллер транспортного средства определяет эталонную скорость транспортного средства в соответствии с углом поворота цапфы переднего колеса и скоростью заднего колеса транспортного средства.
[00153] После определения угла поворота переднего колеса транспортного средства в соответствии с углом поворота рулевого колеса и заданными данными об угле поворота колеса, контроллер транспортного средства дополнительно извлекает скорость заднего колеса из информации о скорости колес транспортного средства, при этом скорость заднего колеса включает скорость левого заднего колеса и скорость правого заднего колеса. Контроллер транспортного средства определяет эталонную скорость транспортного средства в соответствии с углом поворота цапфы переднего колеса и скоростью заднего колеса транспортного средства.
[00154] Контроллер транспортного средства определяет эталонную скорость транспортного средства в соответствии с углом поворота цапфы переднего колеса и скоростью заднего колеса транспортного средства, посредством: получения коррекционного значения скорости колеса для скорости левого заднего колеса в соответствии с углом поворота цапфы левого переднего колеса; получения коррекционного значения скорости колеса для скорости правого заднего колеса в соответствии с углом поворота цапфы правого переднего колеса; определения среднего значения коррекционного значения скорости левого заднего колеса и коррекционного значения скорости правого заднего колеса как эталонной скорости транспортного средства. Скорость заднего колеса корректируют посредством угла поворота цапфы переднего колеса, а скорректированное среднее значение скорости заднего колеса определяют как эталонную скорость транспортного средства, что улучшает точность эталонной скорости транспортного средства и исключает ошибочные суждения о юзе вследствие неточной эталонной скорости транспортного средства, обеспечивая таким образом высокие рабочие характеристики автомобиля при рулевом управлении.
[00155] Эталонную скорость транспортного средства можно вычислить по следующей формуле:
[00156] 
[00157] В том числе  - это эталонная скорость транспортного средства;
- это эталонная скорость транспортного средства;  - это скорость колеса у левого заднего колеса,
- это скорость колеса у левого заднего колеса,  - это скорость колеса у правого заднего колеса; a, b - это угол поворота цапфы колеса левого переднего колеса и угол поворота цапфы колеса правого переднего колеса, соответственно; cos a - это значение косинуса угла поворота цапфы колеса левого переднего колеса, cos b - это значение косинуса угла поворота цапфы правого переднего колеса;
- это скорость колеса у правого заднего колеса; a, b - это угол поворота цапфы колеса левого переднего колеса и угол поворота цапфы колеса правого переднего колеса, соответственно; cos a - это значение косинуса угла поворота цапфы колеса левого переднего колеса, cos b - это значение косинуса угла поворота цапфы правого переднего колеса;  - это коррекционное значение скорости левого заднего колеса, а
- это коррекционное значение скорости левого заднего колеса, а  - это коррекционное значение скорости правого заднего колеса.
- это коррекционное значение скорости правого заднего колеса.
[00158] S213: контроллер транспортного средства определяет значение безопасного смещения скорости транспортного средства в соответствии с эталонной скоростью транспортного средства и заданными данными о безопасном смещении скорости транспортного средства.
[00159] После вычисления и получения эталонной скорости транспортного средства контроллер транспортного средства определяет значение безопасного смещения скорости транспортного средства в соответствии с эталонной скоростью транспортного средства и заданными данными о безопасном смещении скорости транспортного средства.
[00160] Заданные данные о безопасном смещении скорости транспортного средства включают безопасную граничную скорость транспортного средства, соответствующую каждому из совокупности разных эталонных скоростей транспортных средств. Заданные данные о безопасном смещении скорости транспортного средства представляют собой требуемую безопасную граничную скорость на разных скоростях транспортного средства, откалиброванную в соответствии с данными испытаний после предварительных испытаний транспортного средства на разных скоростях транспортного средства. После получения заданных данных о безопасном смещении скорости транспортного средства данные предварительно сохраняют в памяти транспортного средства соответствующей модели для непосредственного дальнейшего использования.
[00161] После вычисления и получения эталонной скорости транспортного средства контроллер транспортного средства ищет безопасную граничную скорость, соответствующую текущей эталонной скорости транспортного средства, в заданных данных о безопасном смещении скорости в соответствии с эталонной скоростью транспортного средства как значение безопасного смещения скорости.
[00162] Например, соответствующее соотношение между эталонной скоростью транспортного средства и безопасной граничной скоростью может быть показано в таблице 1, приведенной ниже:
[00163] Таблица 1
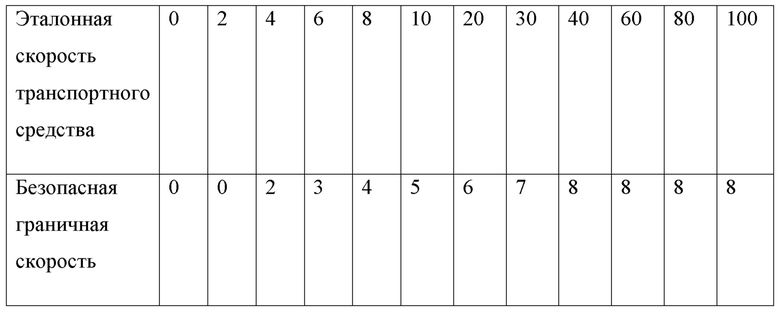
[00164] S214: контроллер транспортного средства определяет коррекционное значение разницы скоростей колес в соответствии с эталонной скоростью транспортного средства, информацией о скорости колес и заданными скорректированными данными о скорости транспортного средства.
[00165] После вычисления и получения эталонной скорости транспортного средства контроллер транспортного средства определяет коррекционное значение разницы скоростей колес в соответствии с эталонной скоростью транспортного средства, информацией о скорости колес и заданными скорректированными данными о скорости транспортного средства.
[00166] Заданные скорректированные данные о скорости транспортного средства включают скорректированное значение скорости транспортного средства, соответствующее каждому из совокупности разных эталонных скоростей транспортного средства. Заданные скорректированные данные о скорости транспортного средства получают при испытании транспортного средства на разделенной дороге заранее, и разницу скоростей колес, вызванную юзом приводного колеса, добавляют на основании эталонной скорости, и разницу скоростей колес принимают как скорректированное значение скорости, соответствующее эталонной скорости, так, чтобы получить скорректированное значение скорости, соответствующее разным эталонным скоростям транспортного средства, и данные суммируют в качестве заданных скорректированных данных о скорости. После получения заданных скорректированных данных о скорости, данные предварительно сохраняют в памяти транспортного средства соответствующей модели для дальнейшего непосредственного использования.
[00167] Контроллер транспортного средства определяет коррекционное значение разницы скоростей колес в соответствии с эталонной скоростью транспортного средства, информацией о скорости колес и заданными скорректированными данными о скорости транспортного средства посредством: после вычисления эталонной скорости транспортного средства, поиска текущих скорректированных данных о скорости транспортного средства в заданных скорректированных данных о скорости транспортного средства в соответствии с эталонной скоростью транспортного средства, определения скорректированного значения скорости транспортного средства, соответствующего эталонной скорости транспортного средства, как скорректированной скорости транспортного средства, соответствующей эталонной скорости транспортного средства; извлечения скорости переднего колеса из информации о скорости колес транспортного средства, при этом скорость переднего колеса включает скорость левого переднего колеса и скорость правого переднего колеса, и определения разницы скоростей передних колес между скоростью переднего колеса и скоростью правого переднего колеса; вычисления эталонной разницы скоростей колес между левым и правым передними колесами в соответствии со скоростью левого переднего колеса и скоростью правого переднего колеса, и получения целевой коррекционной скорости транспортного средства посредством вычитания коррекционной скорости транспортного средства из абсолютной разности между разницей скоростей передних колес и эталонной разницей скоростей колес; определения того, является ли целевая коррекция транспортного средства больше 0, если целевая коррекция транспортного средства больше 0, определения половины целевой коррекции транспортного средства как коррекционного значения разницы скоростей колес; если целевая коррекция транспортного средства меньше либо равна 0, определения 0 как коррекционного значения разницы скоростей колес. При сравнении целевой коррекции транспортного средства с 0, половина целевой коррекции транспортного средства, которая больше 0, определяется как коррекционное значение разницы скоростей колес, что гарантирует, что коррекционное значение разницы скоростей колес является положительным значением и увеличивает целевую скорость приводного вала. На основе обеспечения точности целевой скорости приводного вала увеличивается верхний предел максимальной предельной скорости вращения, что снижает вероятность недостаточной мощности транспортного средства из-за низкой максимальной предельной скорости вращения при последующем уменьшении крутящего момента приводного двигателя.
[00168] Коррекционное значение разницы скоростей колес можно определить по следующей формуле:
[00169] 
[00170] Эталонную разницу скоростей колес вычисляют по следующей формуле:
[00171] 
[00172] В формуле,  - это коррекционное значение разницы скоростей колес,
- это коррекционное значение разницы скоростей колес,  - это скорость левого переднего колеса,
- это скорость левого переднего колеса,  - это скорость правого переднего колеса,
- это скорость правого переднего колеса,  - это разница скоростей передних колес,
- это разница скоростей передних колес,  - это эталонная разница скоростей колес и
- это эталонная разница скоростей колес и  - это коррекционная скорость транспортного средства, соответствующая эталонной скорости транспортного средства.
- это коррекционная скорость транспортного средства, соответствующая эталонной скорости транспортного средства.
[00173] Например, соответствующее соотношение между эталонной скоростью транспортного средства и коррекционной скоростью транспортного средства может быть показано в таблице 2, приведенной ниже:
[00174] Таблица 2
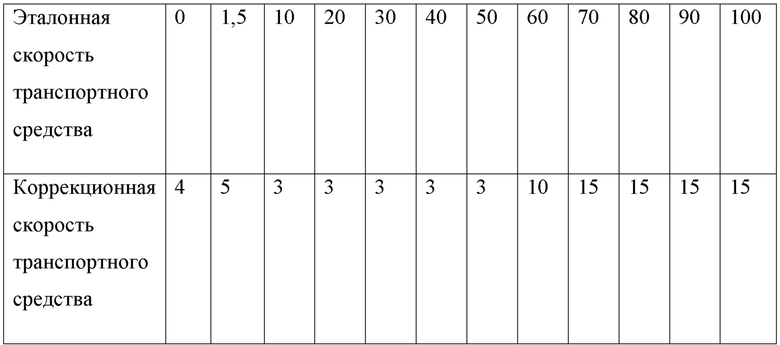
[00175] В этом варианте осуществления контроллер транспортного средства определяет угол поворота переднего колеса транспортного средства в соответствии с углом поворота рулевого колеса и заданными данными об угле поворота колеса. Заданные данные об угле поворота колеса включают углы поворота колеса, соответствующие разным углам поворота рулевого колеса, а затем определяют эталонную скорость транспортного средства в соответствии с углом поворота цапфы переднего колеса и скоростью заднего колеса транспортного средства, а затем определяют значения безопасного смещения скорости транспортного средства в соответствии с эталонной скоростью транспортного средства и заданными данными о безопасном смещении скорости транспортного средства. Заданные данные о безопасном смещении скорости включают безопасную граничную скорость, соответствующую разным эталонным скоростям транспортного средства, и коррекционное значение разницы скоростей колес определяют в соответствии с эталонной скоростью транспортного средства, информацией о скорости колес и заданными данными о скорости коррекции. Заданные данные о скорости коррекции включают значения скорости коррекции, соответствующие разным эталонным скоростям, что уточняет подробный процесс определения контроллером транспортного средства эталонной скорости транспортного средства в соответствии с информацией о скорости колес и углом поворота рулевого колеса транспортного средства, и обеспечивает точную базу данных для последующих действий.
[00176] В одном варианте осуществления, если запрос на антиюзовое ограничение скорости вращения дополнительно содержит предельный крутящий момент двигателя, после определения контроллером двигателя того, что требуется выполнение уменьшения крутящего момента на приводном двигателе, контроллер двигателя управляет крутящим моментом приводного двигателя в замкнутом контуре в соответствии с максимальной предельной скоростью вращения и предельным крутящим моментом двигателя. На этапе S5 управление крутящим моментом приводного двигателя посредством контроллера двигателя в замкнутом контуре в соответствии с максимальной предельной скоростью вращения и предельным крутящим моментом двигателя включает следующие этапы:
[00177] S51: Контроллер двигателя определяет разность скоростей вращения между фактической скоростью вращения приводного двигателя и максимальной предельной скоростью вращения.
[00178] После определения того, что требуется управление уменьшением крутящего момента приводного двигателя, контроллер двигателя нацелен на максимальную предельную скорость вращения и выполняет пропорциональное, интегральное и дифференциальное управление крутящим моментом приводного двигателя, то есть ПИД-управление крутящим моментом. При выполнении ПИД-управления крутящим моментом, с целью избежать перезаряда батареи, необходимо обеспечить, чтобы крутящий момент приводного двигателя был больше предельного крутящего момента двигателя.
[00179] При выполнении ПИД-управления крутящим моментом, контроллер двигателя сначала определяет разность скоростей между фактической скоростью вращения приводного двигателя и максимальной предельной скоростью вращения.
[00180] S52: контроллер двигателя вводит разницу скоростей в ПИД-контроллер и получает крутящий момент с ПИД-регулированием.
[00181] После того как контроллер двигателя определяет разницу скоростей между фактической скоростью вращения приводного двигателя и максимальной предельной скоростью вращения, контроллер двигателя вводит разницу скоростей в ПИД-контроллер и получает крутящий момент с ПИД-регулированием.
[00182] Если разница между фактической скоростью вращения приводного двигателя и максимальной предельной скоростью вращения больше 0, то пропорциональный коэффициент P ПИД-контроллера определяют как положительное значение, а интегральный коэффициент I и дифференциальный коэффициент D калибруют в соответствии с фактической ситуацией; крутящий момент с ПИД-регулированием определяют в соответствии с пропорциональным коэффициентом P, интегральным коэффициентом I, дифференциальным коэффициентом D и разницей скоростей.
[00183] Крутящий момент с ПИД-регулированием можно вычислить по следующей формуле:
[00184] TqPID=P*delta+I*delta*D* delta;
[00185] В этой формуле TqPID - это крутящий момент с ПИД-регулированием; delta - разница скоростей между фактической скоростью вращения приводного двигателя и максимальной предельной скоростью вращения; P, I и D - пропорциональный коэффициент, интегральный коэффициент и дифференциальный коэффициент, соответственно.
[00186] S53: контроллер двигателя определяет сумму крутящего момента с ПИД-регулированием и требуемого крутящего момента транспортного средства в качестве целевого крутящего момента.
[00187] После введения разницы скоростей в ПИД-контроллер и получения крутящего момента с ПИД-регулированием контроллер двигателя принимает сумму крутящего момента с ПИД-регулированием и требуемого крутящего момента транспортного средства как целевой крутящий момент. Требуемый крутящий момент транспортного средства определяют в соответствии с запросом о крутящем моменте транспортного средства, передаваемом контроллером транспортного средства, и запрос о крутящем моменте транспортного средства включает требуемый крутящий момент транспортного средства. Контроллер транспортного средства вычисляет требуемый крутящий момент транспортного средства в соответствии с требованиями мощности транспортного средства, а затем передает запрос о крутящем моменте транспортного средства, включающий требуемый крутящий момент транспортного средства, на контроллер двигателя, так что приводной двигатель реализует требуемый крутящий момент транспортного средства в ответ на запрос о крутящем моменте транспортного средства.
[00188] S54: контроллер двигателя выдает больший абсолютный крутящий момент между целевым крутящем моментом и предельным крутящим моментом двигателя как крутящий момент управления приводного двигателя, пока фактическая скорость вращения приводного двигателя меньше максимальной предельной скорости вращения.
[00189] После определения суммы крутящего момента с ПИД-регулированием и требуемого крутящего момента транспортного средства как целевого крутящего момента, контроллер двигателя выдает больший абсолютный крутящий момент между целевым крутящим моментом и предельным крутящим моментом двигателя в качестве крутящего момента управления приводного двигателя, чтобы избежать того, что абсолютное значение выдаваемого крутящего момента приводного двигателя будет не меньше предельного крутящего момента двигателя, на основе обеспечения того, что батарея не перезаряжена, крутящим моментом и скоростью приводного двигателя управляют для уменьшения, пока фактическая скорость вращения приводного двигателя не будет меньше максимальной предельной скорости вращения, предотвращая таким образом юз транспортного средства.
[00190] В этом варианте осуществления контроллер двигателя определяет разницу скоростей между фактической скоростью вращения приводного двигателя и максимальной предельной скоростью вращения, затем вводит разницу скоростей в ПИД-контроллер для получения крутящего момента с ПИД-регулированием, а затем сравнивает крутящий момент с ПИД-регулированием с требуемым крутящим моментом транспортного средства. Сумму целевого крутящего момента и предельного крутящего момента двигателя определяют как целевой крутящий момент, и больший абсолютный крутящий момент целевого крутящего момента и предельного крутящего момента двигателя выводят в качестве крутящего момента управления приводного двигателя до тех пор, пока фактическая скорость вращения приводного двигателя не станет меньше максимальной предельной скорости передачи; благодаря ПИД-регулированию, скорость приводного двигателя изменяется к максимальной предельной скорости, с обеспечением плавности изменения скорости, в то же время, большее абсолютное значение между целевым крутящим моментом и предельным крутящим моментом двигателя выдают как крутящий момент управления приводного двигателя, на основании обеспечения того, что батарея не заряжена, выполняется точное управление крутящим моментом приводного двигателя для предотвращения юза транспортного средства.
[00191] Если запрос на антиюзовое ограничение скорости вращения только включает максимальную предельную скорость вращения, контроллер двигателя выполняет в замкнутом контуре управление крутящим моментом приводного двигателя в соответствии с максимальной предельной скоростью вращения. Выполнение контроллером двигателя управления в замкнутом контуре крутящим моментом приводного двигателя в соответствии с максимальной предельной скоростью вращения включает следующие этапы:
[00192] S31: контроллер двигателя определяет разницу скоростей между фактической скоростью вращения приводного двигателя и максимальной предельной скоростью вращения.
[00193] В том варианте осуществления, если запрос на антиюзовое ограничение скорости вращения только включает максимальную предельную скорость вращения, это указывает на то, что режим привода системы питания транспортного средства является чисто электрическим режимом привода и нет необходимости рассматривать перезаряд батареи. Когда необходимо выполнить управление уменьшением крутящего момента на приводном двигателе, контроллер двигателя напрямую нацелен на максимальную предельную скорость вращения и выполняет ПИД-управление крутящего момента в отношении крутящего момента приводного двигателя.
[00194] S32: контроллер двигателя вводит разницу скоростей в ПИД-контроллер и получает крутящий момент с ПИД-регулированием.
[00195] Подробные процессы введения контроллером двигателя разницы скоростей в ПИД-контроллер и получения крутящего момента с ПИД-регулированием упомянуты выше и не описываются подробно.
[00196] S33: контроллер двигателя выдает сумму крутящего момента с ПИД-регулированием и требуемого крутящего момента транспортного средства как крутящий момент управления приводного двигателя, пока фактическая скорость вращения приводного двигателя не будет меньше максимальной предельной скорости вращения.
[00197] После введения разницы скоростей в ПИД-контроллер и получения крутящего момента с ПИД-регулированием контроллер двигателя выдает сумму крутящего момента с ПИД-регулированием и требуемого крутящего момента транспортного средства как крутящий момент управления приводного двигателя, пока фактическая скорость вращения приводного двигателя не станет меньше максимальной предельной скорости вращения, предотвращая таким образом юз транспортного средства.
[00198] В этом варианте осуществления, когда запрос на антиюзовое ограничение скорости вращения только включает максимальную предельную скорость вращения, контроллер двигателя определяет разницу скоростей между фактической скоростью вращения приводного двигателя и максимальной предельной скоростью вращения, а затем вводит разницу скоростей в ПИД-контроллер для получения крутящего момента с ПИД-регулированием, а затем сумму крутящего момента с ПИД-регулированием и требуемого крутящего момента транспортного средства выдают как крутящий момент управления приводного двигателя, пока фактическая скорость вращения приводного двигателя не станет меньше максимальной предельной скорости вращения; благодаря ПИД-управлению, скорость приводного двигателя изменяется на максимальную предельную скорость вращения с обеспечением плавности изменения скорости, при этом обеспечено точное и быстрое управление крутящим моментом приводного двигателя для предотвращения юза транспортного средства.
[00199] Следует понимать, что порядковый номер каждого этапа в приведенном выше варианте осуществления не означает порядок выполнения, порядок выполнения каждого процесса должен определяться его функцией и внутренней логикой и не должен представлять собой никаких ограничений в отношении процесса реализации варианта осуществления настоящего изобретения.
[00200] В одном варианте осуществления предоставлен контроллер двигателя, который в точности соответствует способу антиюзового управления транспортного средства в описанном выше варианте осуществления. Как показано на фиг. 6, контроллер двигателя содержит модуль 601 приема, модуль 602 определения и модуль 603 управления. Подробное описание каждого функционального модуля является следующим:
[00201] модуль 601 приема применяют для приема запроса на антиюзовое ограничение скорости вращения, при этом запрос на антиюзовое ограничение скорости вращения включает максимальную предельную скорость вращения;
[00202] модуль 602 определения применяют для определения того, требуется ли выполнить управление уменьшением крутящего момента на приводном двигателе, в соответствии с максимальной предельной скоростью вращения и фактической скоростью вращения приводного двигателя;
[00203] модуль 603 управления управляет крутящим моментом приводного двигателя в замкнутом контуре в соответствии с максимальной предельной скоростью вращения, если управление уменьшением крутящего момента на приводном двигателе требуется выполнить.
[00204] Кроме того, если запрос на антиюзовое ограничение скорости вращения включает предельный крутящий момент двигателя, модуль 603 управления применяют для:
[00205] определения разницы скоростей вращения между фактической скоростью вращения приводного двигателя и максимальной предельной скоростью вращения контроллером двигателя;
[00206] введения разницы скоростей в ПИД-контроллер и получения крутящего момента с ПИД-регулированием контроллером двигателя;
[00207] определения суммы крутящего момента с ПИД-регулированием и требуемого крутящего момента транспортного средства в качестве целевого крутящего момента контроллером двигателя;
[00208] выдачи большего крутящего момента из целевого крутящего момента и предельного крутящего момента двигателя в качестве крутящего момента управления приводного двигателя контроллером двигателя, пока фактическая скорость вращения приводного двигателя не станет меньше максимальной предельной скорости вращения.
[00209] В одном варианте осуществления предоставлен контроллер транспортного средства, который соответствует способу антиюзового управления транспортного средства в описанном выше варианте осуществления. Контроллер транспортного средства содержит первый модуль определения, второй модуль определения и модуль передачи. Подробное описание каждого функционального модуля является следующим:
[00210] первый модуль определения применяют для определения того, требуется ли выполнение антиюзового ограничения скорости вращения на приводном двигателе, и определения того, требуется ли ограничение крутящего момента приводного двигателя;
[00211] второй модуль определения применяют для определения максимальной предельной скорости вращения приводного двигателя и определения предельного крутящего момента двигателя, если антиюзовое ограничение скорости вращения требуется выполнить на приводном двигателе и крутящий момент приводного двигателя требуется ограничить.
[00212] Модуль передачи используется для генерирования запроса на антиюзовое ограничение скорости вращения в соответствии с предельным крутящим моментом двигателя и максимальной предельной скоростью вращения, передачи запроса на антиюзовое ограничение скорости вращения на контроллер двигателя, приема сигнала активации функции тяги и запроса на антиюзовое уменьшение крутящего момента, передаваемых электронной системой стабилизации кузова транспортного средства, генерирования команды отмены ограничения скорости вращения в соответствии с сигналом активации функции тяги и передачи команды отмены ограничения скорости вращения и запроса на антиюзовое уменьшение крутящего момента на контроллер двигателя, приема запроса на антиюзовое ограничение скорости вращения и определения, требуется ли выполнение управления уменьшением крутящего момента на приводном двигателе, в соответствии с максимальной предельной скоростью вращения и фактической скоростью вращения приводного двигателя, управления крутящим моментом приводного двигателя в замкнутом контуре в соответствии с максимальной предельной скоростью вращения, если требуется выполнение управления уменьшением крутящего момента на приводном двигателе.
[00213] Дополнительно второй модуль определения применяют для:
[00214] определения, в соответствии с информацией о скорости колес и углом поворота рулевого колеса транспортного средства, эталонной скорости транспортного средства, коррекционного значения разницы скоростей колес и значения безопасного смещения скорости транспортного средства;
[00215] определения суммы эталонной скорости транспортного средства, коррекционного значения разницы скоростей колес и значения безопасного смещения скорости транспортного средства в качестве целевой скорости приводного вала транспортного средства;
[00216] вычисления максимальной предельной скорости вращения путем выполнения преобразования передаточного числа в отношении целевой скорости приводного вала транспортного средства контроллером транспортного средства.
[00217] Дополнительно второй модуль определения применяют для:
определения угла поворота цапфы колеса переднего колеса транспортного средства в соответствии с углом поворота рулевого колеса и заданными данными об угле поворота цапфы колеса, причем заданные данные об угле поворота цапфы колеса включают угол поворота цапфы колеса, соответствующий каждому из совокупности разных углов поворота рулевого колеса;
определения эталонной скорости транспортного средства в соответствии с углом поворота цапфы колеса переднего колеса и скоростью колеса заднего колеса транспортного средства контроллером транспортного средства;
[00218] определения значения безопасного смещения скорости транспортного средства в соответствии с эталонной скоростью транспортного средства и заданными данными о безопасном смещении скорости транспортного средства контроллером транспортного средства, при этом заданные данные о безопасном смещении скорости транспортного средства включают безопасную граничную скорость транспортного средства, соответствующую каждой из совокупности разных эталонных скоростей транспортного средства; и
[00219] определения коррекционного значения разницы скоростей колес в соответствии с эталонной скоростью транспортного средства, информацией о скорости колес и заданными скорректированными данными о скорости транспортного средства контроллером транспортного средства, при этом заданные скорректированные данные о скорости транспортного средства включают скорректированное значение скорости транспортного средства, соответствующее каждой из совокупности разных эталонных скоростей транспортного средства.
[00220] Дополнительно первый модуль определения применяют для:
[00221] определения того, является ли рабочий режим системы питания заданным режимом;
[00222] если рабочий режим системы питания является заданным режимом, определения того, находится ли транспортное средство на заданной передаче, в соответствии с информацией о передаче;
[00223] если транспортное средство находится на заданной передаче, определения того, активирована ли функция тяги, в соответствии с условием активации функции электронной системы стабилизации кузова транспортного средства; и
[00224] если функция тяги не активирована, определения того, что на приводном двигателе требуется выполнить антиюзовое ограничение скорости вращения.
[00225] Что касается конкретных ограничений контроллера двигателя и контроллера транспортного средства, см. ограничения на способ антиюзового управления транспортного средства, которые указаны выше и повторяться не будут. Каждый модуль в вышеупомянутом контроллере двигателя и контроллере транспортного средства может быть полностью или частично реализован посредством программного обеспечения, аппаратного обеспечения и их комбинации. Каждый из вышеуказанных модулей может быть встроен в процессор в компьютерном устройстве или выполнен независимо от него в форме аппаратного обеспечения или может храниться в памяти компьютерного устройства в форме программного обеспечения, так что процессор может вызывать и исполнять команды, соответствующие каждому из вышеуказанных модулей.
[00226] В одном варианте осуществления предоставлен контроллер двигателя или контроллер транспортного средства. Контроллер двигателя или контроллер транспортного средства содержит процессор, устройство хранения данных, сетевой интерфейс, устройство отображения и устройство ввода, соединенные через системную шину. Процессор контроллера двигателя или контроллера транспортного средства используется для обеспечения вычислительных и управляющих функциональных возможностей. Устройство хранения данных контроллера двигателя или оборудования управления транспортным средством содержит носитель данных и внутреннюю память. Носитель данных хранит операционные системы и компьютерные программы. Эта внутренняя память обеспечивает среду для запуска операционной системы и компьютерных программ на носителе данных. Сетевой интерфейс контроллера двигателя или контроллера транспортного средства используется для осуществления связи с внешними устройствами через сетевое соединение. Компьютерная программа реализует способ антиюзового управления транспортного средства при исполнении процессором.
[00227] В одном варианте осуществления, как показано на фиг. 7, представлен контроллер двигателя или контроллер транспортного средства, содержащий устройство хранения данных, процессор и компьютерную программу, хранящуюся в устройстве хранения данных и исполняемую процессором. Процессор исполняет компьютерную программу. Программа реализует этапы описанного выше способа антиюзового управления транспортного средства.
[00228] В одном варианте осуществления предоставлен машиночитаемый носитель данных, на котором хранится компьютерная программа. Когда компьютерная программа исполняется процессором, реализуются этапы способа антиюзового управления транспортного средства.
[00229] Специалистам в данной области техники будет понятно, что все процессы или часть процессов в способах, указанных в вышеописанных вариантах осуществления, могут быть выполнены посредством отправки команд соответствующему аппаратному обеспечению через компьютерную программу. Компьютерная программа может храниться на машиночитаемом носителе данных. При исполнении компьютерная программа может включать процессы из описанных выше вариантов осуществления способа. Любая ссылка на память, хранилище, базу данных или другие носители, используемые в вариантах осуществления, предоставленных в этом изобретении, могут включать энергонезависимую и/или энергозависимую память.
[00230] Специалисты в данной области техники могут легко понять, что в целях удобства и простоты описания в качестве примера использована лишь часть вышеописанных функциональных блоков и модулей. В фактических применениях вышеуказанные функции могут быть распределены по разным функциональным блокам и модулям в соответствии с потребностями. Модульная комплектация означает разделение внутренней структуры устройства на разные функциональные блоки или модули для выполнения всех или части описанных выше функций.
[00231] Вышеописанные варианты осуществления используются лишь для иллюстрации технических решений настоящего изобретения, но не их ограничения; хотя настоящее изобретение было подробно описано со ссылкой на вышеизложенные варианты осуществления, специалистам в данной области следует понимать, что они все равно могут внедрять вышеупомянутые варианты реализации. Технические решения, описанные в примерах, можно модифицировать или выполнить эквивалентные замены некоторых технических признаков; и эти модификации или замены не приводят к отклонению сути соответствующих технических решений от идеи и объема технических решений каждого варианта осуществления настоящего изобретения и должны быть включены в объем правовой защиты настоящего изобретения.
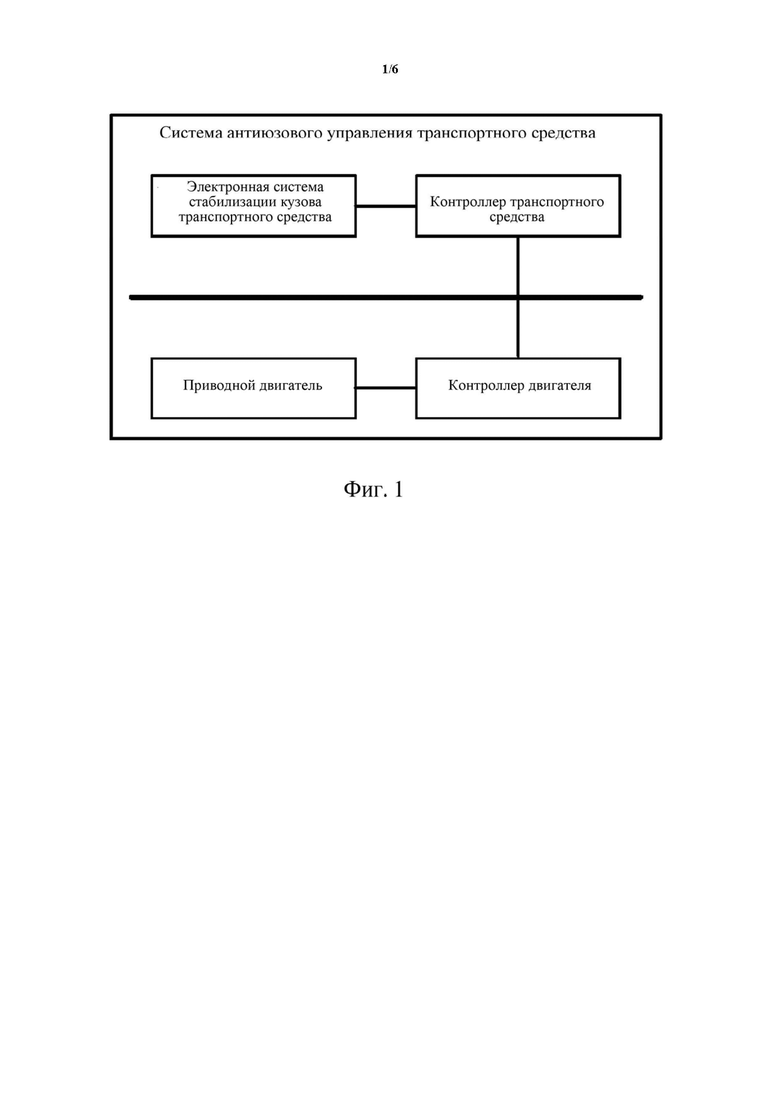
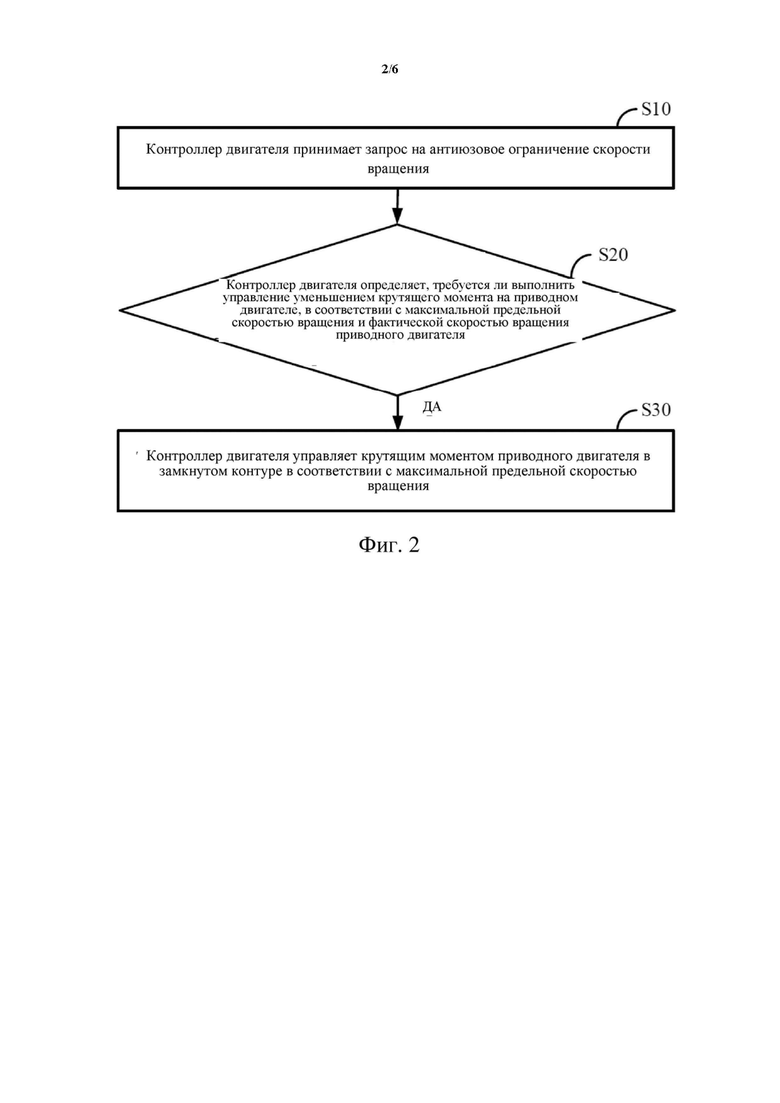
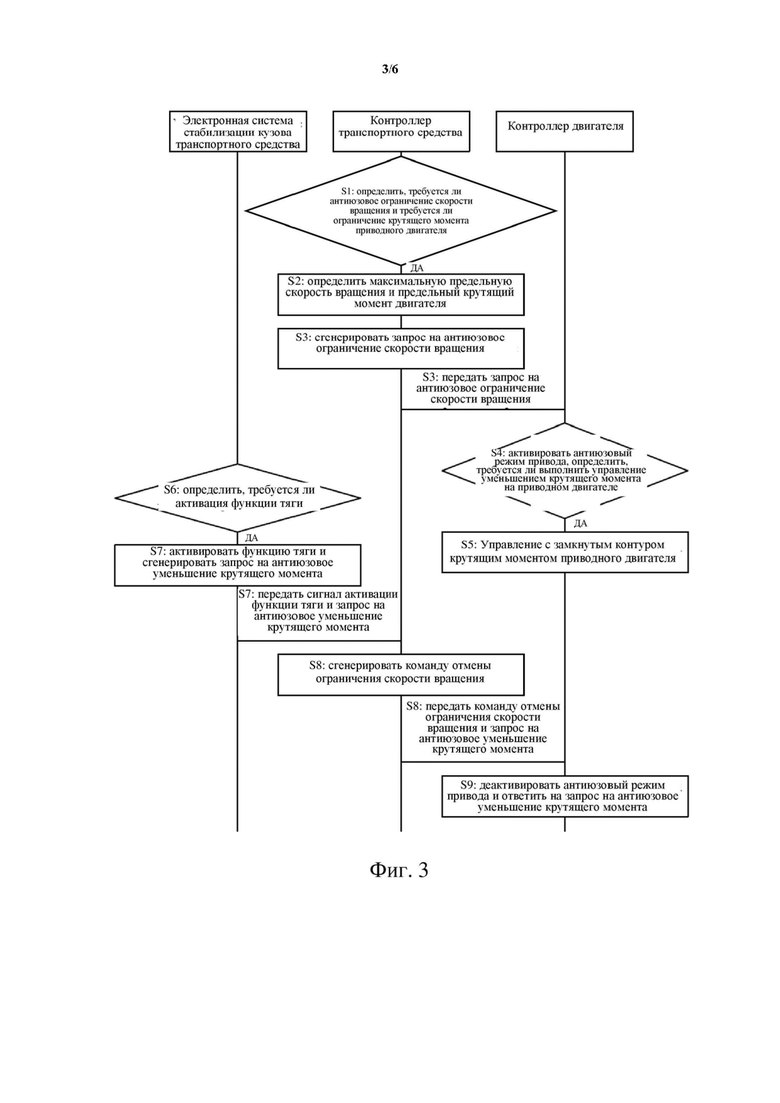
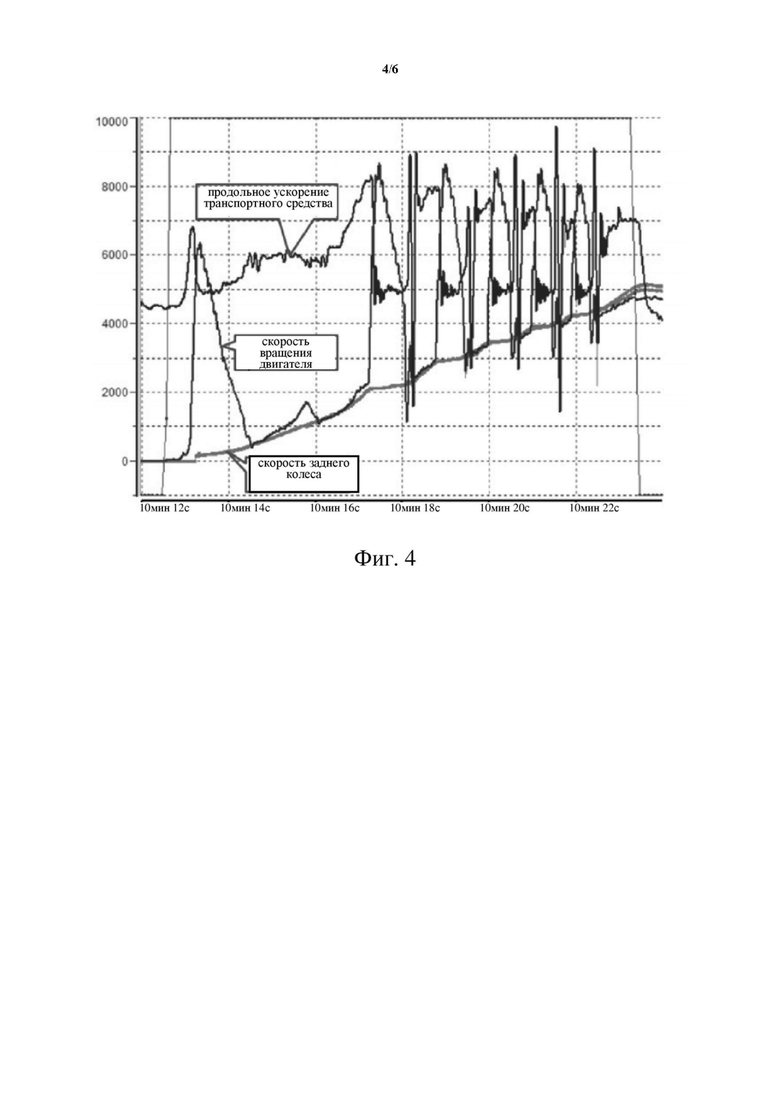
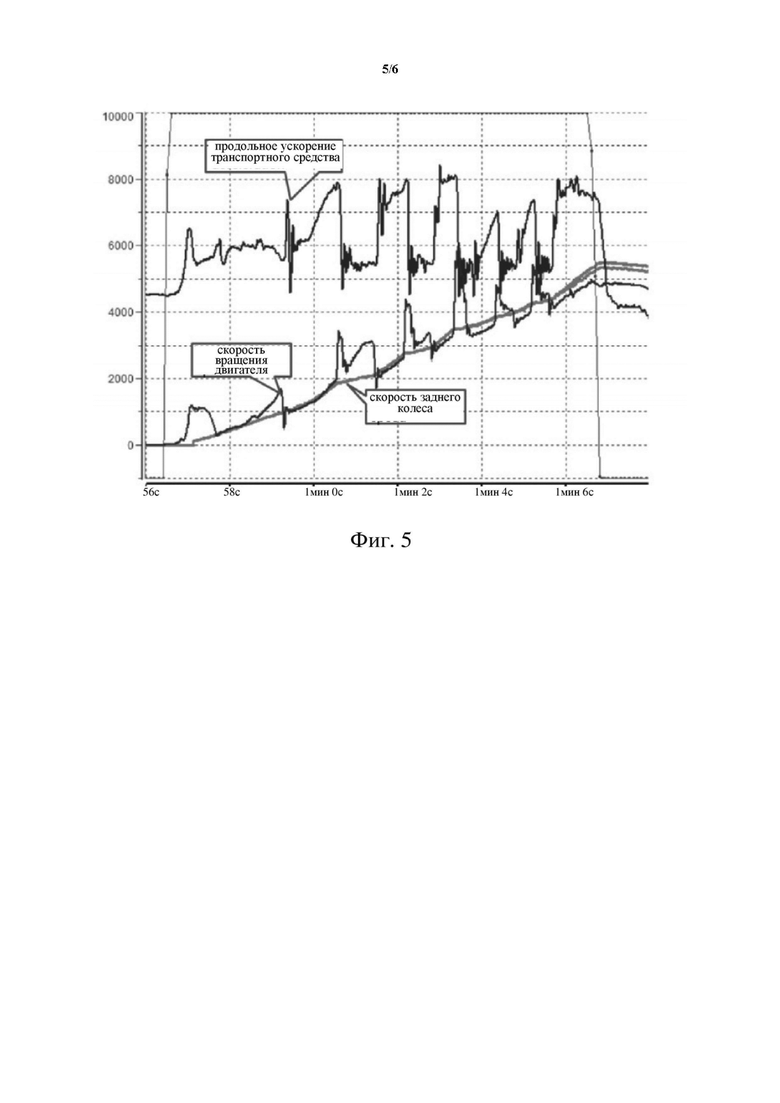
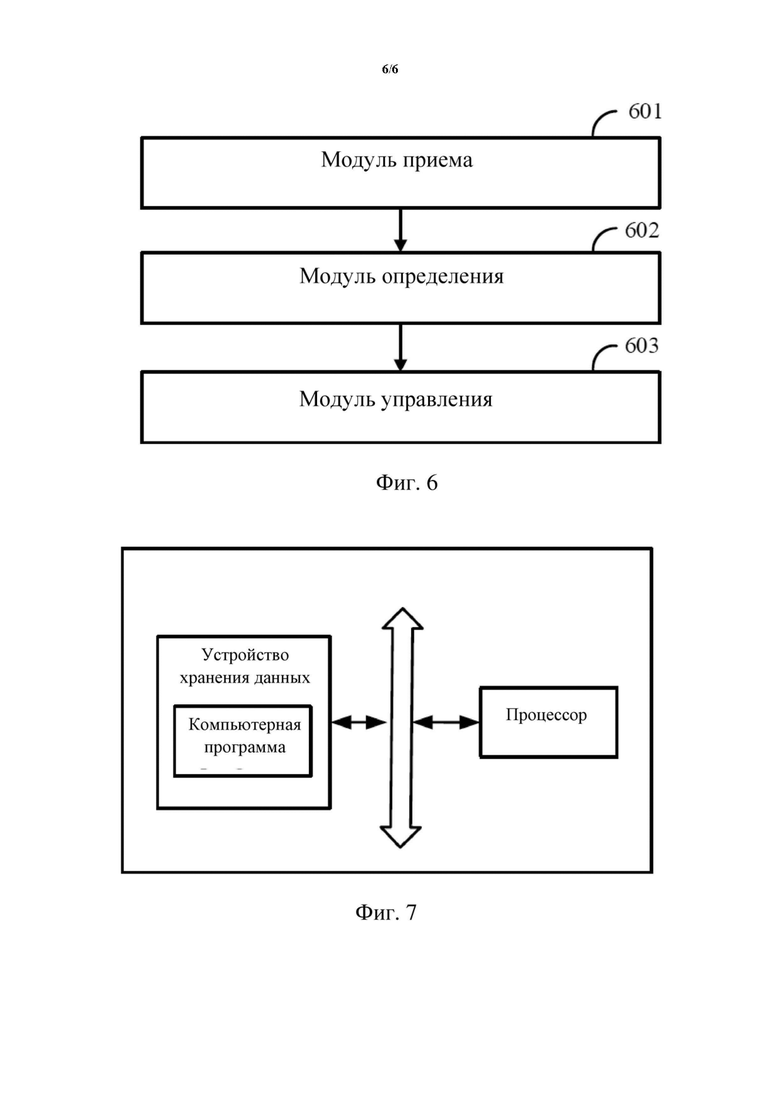
Изобретение относится к транспортным средствам. Способ антиюзового управления транспортным средством включает прием запроса на антиюзовое ограничение скорости вращения контроллером двигателя. Данный запрос содержит максимальную предельную скорость вращения. Далее определяют, требуется ли выполнить управление уменьшением крутящего момента на приводном двигателе в соответствии с максимальной предельной скоростью вращения и фактической скоростью вращения приводного двигателя. В ответ на то, что управление уменьшением крутящего момента на приводном двигателе требуется выполнить, управляют крутящим моментом приводного двигателя в замкнутом контуре в соответствии с максимальной предельной скоростью вращения контроллером двигателя. Повышается эффективность антиюзового управления в реальном времени. 4 н. и 7 з.п. ф-лы, 7 ил.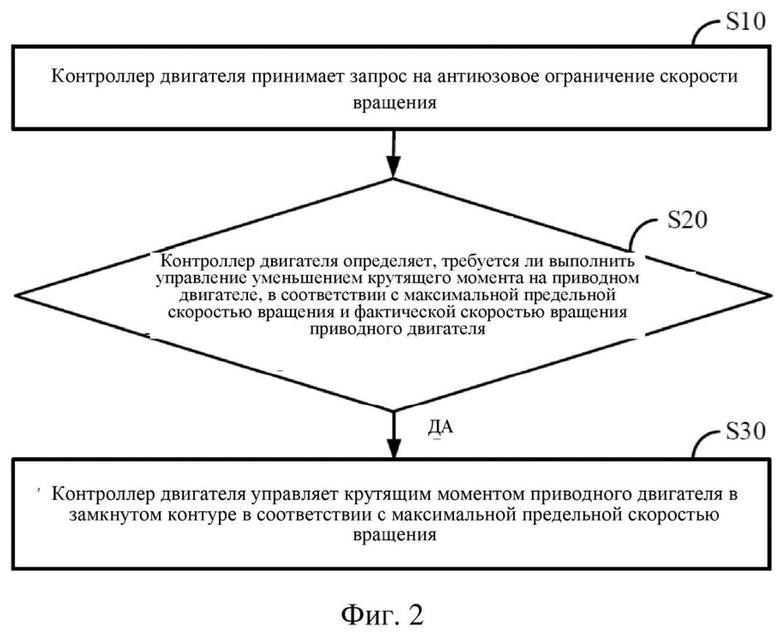
1. Способ антиюзового управления транспортным средством, включающий:
прием запроса на антиюзовое ограничение скорости вращения контроллером двигателя, причем запрос на антиюзовое ограничение скорости вращения содержит максимальную предельную скорость вращения;
определение того, требуется ли выполнить управление уменьшением крутящего момента на приводном двигателе, в соответствии с максимальной предельной скоростью вращения и фактической скоростью вращения приводного двигателя; и
в ответ на то, что управление уменьшением крутящего момента на приводном двигателе требуется выполнить управление крутящим моментом приводного двигателя в замкнутом контуре в соответствии с максимальной предельной скоростью вращения контроллером двигателя.
2. Способ антиюзового управления транспортным средством по п. 1, отличающийся тем, что после приема запроса на антиюзовое ограничение скорости вращения контроллером двигателя, дополнительно включает:
после активации функции тяги, передачу сигнала активации функции тяги и запроса на антиюзовое уменьшение крутящего момента электронной системой стабилизации кузова транспортного средства на контроллер транспортного средства;
после приема сигнала активации функции тяги и запроса на антиюзовое уменьшение крутящего момента, генерирование команды отмены ограничения скорости вращения в соответствии с сигналом активации функции тяги и передачу команды отмены ограничения скорости вращения и запроса на антиюзовое уменьшение крутящего момента контроллером транспортного средства на контроллер двигателя; и
после приема команды отмены ограничения скорости вращения и запроса на антиюзовое уменьшение крутящего момента, деактивацию антиюзового режима привода в соответствии с командой отмены ограничения скорости вращения и отправку ответа на запрос на антиюзовое уменьшение крутящего момента контроллером двигателя.
3. Способ антиюзового управления транспортным средством по п. 1, отличающийся тем, что перед приемом запроса на антиюзовое ограничение скорости вращения контроллером двигателя, дополнительно включает:
определение того, требуется ли выполнение антиюзового ограничения скорости вращения на приводном двигателе, и определение того, требуется ли ограничение крутящего момента приводного двигателя, контроллером транспортного средства;
в ответ на то, что антиюзовое ограничение скорости вращения требуется выполнить на приводном двигателе и крутящий момент приводного двигателя требуется ограничить, определение максимальной предельной скорости вращения и предельного крутящего момента двигателя приводного двигателя контроллером транспортного средства;
генерирование запроса на антиюзовое ограничение скорости вращения в соответствии с предельным крутящим моментом двигателя и максимальной предельной скоростью вращения и передачу запроса на антиюзовое ограничение скорости вращения на контроллер двигателя контроллером транспортного средства.
4. Способ антиюзового управления транспортным средством по п. 3, отличающийся тем, что определение максимальной предельной скорости вращения контроллером транспортного средства включает:
в соответствии с информацией о скорости колес и углом поворота рулевого колеса транспортного средства, определение эталонной скорости транспортного средства, коррекционного значения разницы скоростей колес и значения безопасного смещения скорости транспортного средства контроллером транспортного средства;
определение суммы эталонной скорости транспортного средства, коррекционного значения разницы скоростей колес и значения безопасного смещения скорости транспортного средства в качестве целевой скорости приводного вала транспортного средства контроллером транспортного средства; и
вычисление максимальной предельной скорости вращения посредством выполнения преобразования передаточного числа в отношении целевой скорости приводного вала транспортного средства контроллером транспортного средства.
5. Способ антиюзового управления транспортным средством по п. 4, отличающийся тем, что определение эталонной скорости транспортного средства, коррекционного значения разницы скоростей колес и значения безопасного смещения скорости транспортного средства контроллером транспортного средства, в соответствии с информацией о скорости колес и углом поворота рулевого колеса транспортного средства, включает:
определение угла поворота цапфы колеса переднего колеса транспортного средства контроллером транспортного средства в соответствии с углом поворота рулевого колеса и заданными данными об угле поворота цапфы колеса, причем заданные данные об угле поворота цапфы колеса содержат угол поворота цапфы колеса, соответствующий каждому из совокупности разных углов поворота рулевого колеса;
определение эталонной скорости транспортного средства в соответствии с углом поворота цапфы колеса переднего колеса и скоростью колеса заднего колеса транспортного средства контроллером транспортного средства;
определение значения безопасного смещения скорости транспортного средства в соответствии с эталонной скоростью транспортного средства и заданными данными о безопасном смещении скорости транспортного средства контроллером транспортного средства, при этом заданные данные о безопасном смещении скорости транспортного средства содержат безопасную граничную скорость транспортного средства, соответствующую каждой из совокупности разных эталонных скоростей транспортного средства; и
определение коррекционного значения разницы скоростей колес в соответствии с эталонной скоростью транспортного средства, информацией о скорости колес и заданными скорректированными данными о скорости транспортного средства контроллером транспортного средства, при этом заданные скорректированные данные о скорости транспортного средства содержат скорректированное значение скорости транспортного средства, соответствующее каждой из совокупности разных эталонных скоростей транспортного средства.
6. Способ антиюзового управления транспортным средством по п. 3, отличающийся тем, что определение того, требуется ли выполнение антиюзового ограничения скорости вращения на приводном двигателе, контроллером транспортного средства, в соответствии с информацией о передаче транспортного средства и рабочим режимом системы питания, включает:
определение того, является ли рабочий режим системы питания заданным режимом, контроллером транспортного средства;
в ответ на то, что рабочий режим системы питания является заданным режимом, определение того, находится ли транспортное средство на заданной передаче, в соответствии с информацией о передаче, контроллером транспортного средства;
в ответ на то, что транспортное средство находится на заданной передаче, определение того, активирована ли функция тяги, в соответствии с условием активации функции электронной системы стабилизации кузова транспортного средства контроллером транспортного средства; и
в ответ на то, что функция тяги не активирована, определение того, что требуется выполнить антиюзовое ограничение скорости вращения на приводном двигателе, контроллером транспортного средства.
7. Способ антиюзового управления транспортным средством по п. 3, отличающийся тем, что контроллер транспортного средства определяет предельный крутящий момент двигателя приводного двигателя в соответствии с фактической мощностью заряда батареи, фактическим генерированием мощности двигателя и фактической мощностью разряда приводного двигателя.
8. Способ антиюзового управления транспортным средством по п. 1, отличающийся тем, что запрос на антиюзовое ограничение скорости вращения дополнительно содержит предельный крутящий момент двигателя, при этом управление крутящим моментом приводного двигателя в соответствии с максимальной предельной скоростью вращения в замкнутом контуре контроллером двигателя включает:
определение разницы скоростей вращения между фактической скоростью вращения приводного двигателя и максимальной предельной скоростью вращения контроллером двигателя;
введение разницы скоростей в ПИД-контроллер и получение крутящего момента с ПИД-регулированием контроллером двигателя;
определение суммы крутящего момента с ПИД-регулированием и требуемого крутящего момента транспортного средства в качестве целевого крутящего момента контроллером двигателя;
выдачу большего крутящего момента из целевого крутящего момента и предельного крутящего момента двигателя в качестве крутящего момента управления приводного двигателя контроллером двигателя, пока фактическая скорость вращения приводного двигателя не станет меньше максимальной предельной скорости вращения.
9. Контроллер двигателя, содержащий:
модуль приема, выполненный с возможностью принимать запрос на антиюзовое ограничение скорости вращения, при этом запрос на антиюзовое ограничение скорости вращения содержит максимальную предельную скорость вращения;
модуль определения, выполненный с возможностью определять, требуется ли выполнить управление уменьшением крутящего момента на приводном двигателе, в соответствии с максимальной предельной скоростью вращения и фактической скоростью вращения приводного двигателя; и
модуль управления, выполненный с возможностью управлять крутящим моментом приводного двигателя в замкнутом контуре в соответствии с максимальной предельной скоростью вращения в ответ на то, что управление уменьшением крутящего момента на приводном двигателе требуется выполнить.
10. Система антиюзового управления транспортным средством, содержащая:
электронную систему стабилизации кузова транспортного средства, выполненную с возможностью:
передавать сигнал активации функции тяги и запрос на антиюзовое уменьшение крутящего момента на контроллер транспортного средства после активации функции тяги;
контроллер транспортного средства, выполненный с возможностью:
определять, требуется ли выполнить антиюзовое ограничение скорости вращения на приводном двигателе, и определять, требуется ли ограничение крутящего момента приводного двигателя;
определять максимальную предельную скорость вращения и предельный крутящий момент двигателя приводного двигателя в ответ на то, что на приводном двигателе требуется выполнить антиюзовое ограничение скорости вращения и требуется ограничить крутящий момент приводного двигателя;
генерировать запрос на антиюзовое ограничение скорости вращения в соответствии с предельным крутящим моментом двигателя и максимальной предельной скоростью вращения и передавать запрос на антиюзовое ограничение скорости вращения на контроллер двигателя; и
принимать сигнал активации функции тяги и запрос на антиюзовое уменьшение крутящего момента, передаваемые электронной системой стабилизации кузова транспортного средства, генерировать команду отмены ограничения скорости вращения в соответствии с сигналом активации функции тяги и передавать команду отмены ограничения скорости вращения и запрос на антиюзовое уменьшение крутящего момента на контроллер двигателя;
контроллер двигателя, выполненный с возможностью:
принимать запрос на антиюзовое ограничение скорости вращения и определять, требуется ли выполнить управление уменьшением крутящего момента на приводном двигателе, в соответствии с максимальной предельной скоростью вращения и фактической скоростью вращения приводного двигателя;
управлять крутящим моментом приводного двигателя в соответствии с максимальной предельной скоростью вращения в замкнутом контуре в ответ на то, что управление уменьшением крутящего момента на приводном двигателе требуется выполнить; и
после приема команды отмены ограничения скорости вращения и запроса на антиюзовое уменьшение крутящего момента, деактивировать антиюзовый режим привода в соответствии с командой отмены ограничения скорости вращения и отвечать на запрос на антиюзовое уменьшение крутящего момента.
11. Машиночитаемый носитель данных, на котором хранятся команды, которые при исполнении процессором приводят к выполнению процессором способа антиюзового управления транспортным средством по любому из пп. 1-8.
| CN 110466358 A, 19.11.20219 | |||
| US 9440556 B2, 13.09.2016 | |||
| US 2018065619 A1, 08.03.2018 | |||
| JP 2017088029 A, 25.05.2017 | |||
| СПОСОБ УПРАВЛЕНИЯ МОТОРОМ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2750961C2 |

