Изобретение относится к измерительной технике, а именно к способам измерения расхода жидкостей и газов в трубопроводах без контакта с контролируемой средой.
Изобретение может быть использовано во многих областях промышленности и жилищно-коммунального хозяйства (ЖКХ).
Общей проблемой измерения жидкости и газа является возможность их бесконтактного контроля с достаточной точностью, особенно это относиться к контролю в сложных конфигурациях трубопроводов.
Общеизвестны расходомеры жидкостей и газа, применяемые в ЖКХ для измерения расходов горячей и холодной воды, см. П.П. Кремлевский «Расходомеры и счетчики количества веществ» изд. Политехника, С. Петербург, 2004, стр. 5-36.
Недостатки: нужна врезка в трубопровод, замена раз в 3-4 года, погрешность измерения до 3,5%.
Известен патент РФ. «Расходомер жидких и газовых сред в напорных трубопроводах» №2411456 C1, в котором измерения расхода жидкости и газов производится при помощи накладных расходомеров и оба преобразователя размещены на поверхности трубы в диаметрально противоположных точках. Излучающий преобразователь содержит элемент излучения объемных ультразвуковых волн, выполненный в виде упругого стержня (или трубки, заполненной жидкостью), с изгибом в плоскости осевого сечения трубы по форме дуги, кривизна которой пропорциональна скорости потока в заданном диапазоне скоростей. К концам элемента излучения подключены управляемые линии задержки ультразвуковых импульсов, идущих от генераторов сигналов, размещенных в электронном блоке. Приемный преобразователь выполнен из пьезоэлемента, который имеет звуковой контакт с трубой в точках выхода ультразвуковых импульсов, проходящих через среду в трубе, а также по стенке трубы в поперечном ее сечении. Причем используется вертикальное зондирование двух лучей, которое в случае отсутствия течения попадает на приемный элемент после прохождения через контролируемую среду. В случае присутствия потока времена между излучениями источником двух волн варьируются так, чтобы результирующее колебание, после прохождения через среду, оказалось в точке входа приемного устройства.
Недостатком является то, что измерения с заявленной точностью могут быть проведены только на достаточно длинных прямых участков трубопровода. Принцип работы устройства не позволяет учитывать неравномерный профиль потока, что ведет к снижению точности устройства в условиях сложных конфигураций трубопровода. Данный недостаток обусловлен отсутствием возможности реализации многоплоскостной расходометрии.
Также известно устройство ультразвукового измерения расхода, которое содержит как минимум два обратимых электроакустических преобразователей, каждый из которых имеет диаграмму направленности с углом раствора не менее 60° в разных плоскостях сечения и расположенный таким образом, чтобы ось диаграммы направленности была перпендикулярна к продольной оси трубопровода. Причем внешняя излучающая поверхность каждого электроакустического преобразователя совмещена с внутренней поверхностью трубопровода. Измерения расхода проводят как минимум при помощи двух электроакустических преобразователей. Преобразователи могут быть расположены как друг напротив друга, так и иным образом, например таким, чтобы ломаная линия проходила от одного преобразователя до другого с точками излома на внутренней поверхности трубопровода (см. патент РФ №2264602 «Ультразвуковой способ измерения расхода жидких и/или газообразных сред и устройство для его осуществления», кл G01F 1/66 от 20.11.2005 Бюл. №32).
Недостаток состоит в том, что предполагается контакт излучающей поверхности преобразователя с контролируемой средой. Это не позволяет применять его в качестве переносного, так как при использовании накладных преобразователей возникла бы неконтролируемая погрешность их взаимного позиционирования, величина которой зависит от их количества. Также это бы сказалось на времени и сложности монтажа.
Другой недостаток состоит в том, что из-за использования врезных датчиков, возникают ограничения на область применения устройств, не позволяя применять способ в случае высоких температур контролируемого вещества, или, например, агрессивных сред.
Наиболее близким техническим решением является частотный ультразвуковой расходомер, см. П.П. Кремлевский, г. С. Петербург, изд. Политехника, 2004 г, стр. 352-357. Например, расходомер с двумя акустическими каналами. Генератор создает колебания ВЧ=10 МГц, которые после прохода через модуляторы поступают к пьезоэлементам, которые излучают и получают колебания, разность этих частот ≈50 Гц и по этой разности и судят о расходе жидкости потока - прототип.
Недостаток: погрешность не ниже 2%, т.к. используется непрерывная гармоническая частота, излучаемая и принимаемая пачками.
До настоящего времени не созданы расходомеры жидкостей и газовоздушных потоков, отвечающих следующим основным требованиям:
- высокой точности, менее 1%
- работоспособности при различных скоростях потока, как минимальных, так и максимальных
- достаточно простых в эксплуатации, даже переносных
- обладающих низкими ГМХ
- высокой эксплуатационной надежностью
- умеренно низкой стоимостью
Понятно, что эти требования достаточно противоречивы, но все-таки технической задачей изобретения является повышение точности измерения и удобства системы в эксплуатации.
Технический результат достигается за счет применения широкополосной линейно-частотной модуляции (ЛЧМ) ультразвукового зондирующего сигнала и соответствующей цифровой, специальной обработке отраженных сигналов «по» и «против» потока.
Для решения поставленной задачи предлагается.
Способ ультразвукового измерения параметров жидкостных и газовоздушных потоков, основанный на применении ультразвуковых сигналов с линейно-частотной модуляцией ЛЧМ, характеризующийся тем, что излучают зондирующие сигналы в измеряемую среду, принимают по двум каналам отраженные сигналы «по» и «против» потока, измеряют в них высокочастотные сигналы биений, величина которой зависит от времени задержки, усиливают их, выравнивают их автоматической подстройкой по амплитуде, снова измеряют сигналы биений уже низкочастотные и по сигналам, имеющим максимальную энергию в каждом канале, вычисляют скорость потока и расход по формулам:
Скорость потока 
Расход  где:
где:
D - диаметр трубопровода
С - скорость звука в среде измерения
π - число π
α - угол хода лучей
τ1,2 - задержка «по» и «против» потока.
Задача измерения расхода при помощи ультразвука (УЗ) может быть классифицирована в радиотехнических терминах как задача ближней локации. Одним из наиболее эффективных способов повышения точности измерений временных задержек в задачах ближней локации является использование непрерывного излучения сигналов сложной формы, Такие сигналы позволяют обеспечить более высокое отношение сигнал/шум при ограничениях на мощность излучения чем импульсные [1]. Среди методов формирования сложных сигналов наибольшее распространение в радио- и ультразвуковой локации получили сигналы с частотной модуляцией (ЧМ) [1].
Как правило, оптимальный прием таких сигналов реализуется при помощи схемы коррелятора. Схема заключается в синхронном излучении и гетеродинировании сигнала на приемнике. Из полученной смеси выделяют низкочастотную составляющую. Выделенный сигнал называется сигналом биения. Он содержит информацию о задержке принятой волны в своей частоте.
Таким образом, задача повышения точности измерения ЧМ сигналов заключается в повышении точности измерения частоты их сигналов биения [1].
В условиях наличия помех и паразитных сигналов в локационной среде предпочтительнее использовать линейно-частотно модулированные сигналы. Их достоинством является однозначное соответствие частоты их сигнала биений задержки волны, отраженной от каждой цели [2].
Непрерывное ЧМ излучение используется во многих приложениях ближней локации в радиотехнических задачах [3], а также в приложениях акустики, например, в уровнеметрии [4]; в УЗ дальномерах [5]. Однако, авторам неизвестны примеры использования непрерывного сложно модулированного излучения в задачах ультразвуковой расходометрии.
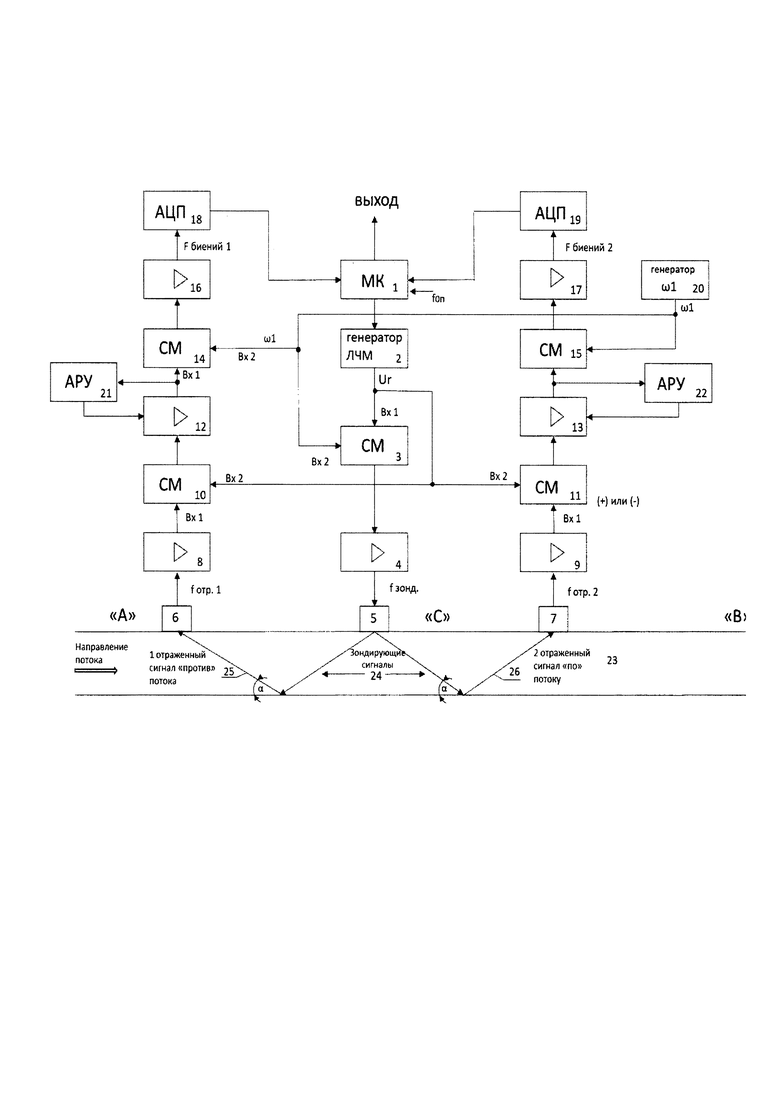
На фиг. 1 показана структурная электрическая схема, предлагаемого расходомера, на которой изображено:
А и В - приемные каналы «против» и «по» потоку соответственно
С - зондирующий вычислительный канал
1 - микроконтроллер-МК
2 - генератор линейно-частотной модуляции - ЛЧМ
3 - смеситель
4 - усилитель
5 - электромагнитный преобразователь - ЭМАП (излучатель ультразвуковой)
6 и 7 - приемники отраженных сигналов первого и второго каналов А и В соответственно - вихретоковые преобразователи
8 и 9 - первичные усилители отраженных сигналов первого и второго каналов соответственно
10 и 11 - первичные смесители первого и второго каналов соответственно
14 и 15 - вторые смесители первого и второго каналов соответственно
16 и 17 - вторые усилители первого и второго каналов соответственно
18 и 19 - АЦП первого и второго каналов соответственно
20 - генератор опорной частоты
21 и 22 - блоки автоматической регулировки усиления (АРУ) первого и второго каналов соответственно
23 - трубопровод
24 - ход лучей зондирующих сигналов
25 - ход лучей отраженных сигналов «против» потока
26 - ход лучей отраженных сигналов «по» потоку
В общем случае способ сводится к следующему: измеряется задержка зондирующего ультразвукового сигнала «по» потоку и «против» потока и по этим двум задержкам, зная диаметр трубопровода и скорость распространения звука в контролируемой среде вычисляется скорость потока и расход. Это предлагается во многих технических решениях. Разница между ним и предлагаемым изобретением состоит в оригинальном алгоритме вычисления и собственно схематически точным решением его воплощения, неизвестного ранее. Этот алгоритм учитывает решающие факторы: переотражение зондирующих сигналов, влияние материалов трубопровода и пр., что не дает уменьшать погрешность измерения меньше 1.5%-2%, а желательно менее 1%, а это прямые экономические выгоды в конечном итоге.
Структурная схема расходомера с ЛЧМ зондирующим сигналом и автоматической подстройкой амплитуды сигнала для расширения полосы излучения частот.
Идея: преобразование ЛЧМ сигнала с повышением частоты(вверх), далее усиление в узкополосном тракте с быстродействующим АРУ для исключения паразитной амплитудной модуляции сигнала. Это позволяет расширять полосу частот и за счет этого повысить точность измерения, имеет два канала: зондирования и преобразования. В каждом осуществляется это преобразование «по» и «против» потока, а затем оценивается задержка «по» и «против» потока и по частоте сигнала биений или фазе.
Необходимость преобразования вверх обусловлена требованиями реализации быстродействующего АРУ. В случае стандартной схемы гетеродинного приема сигнала с преобразованием вниз сигнал биений имеет период, соизмеримый с периодом модуляции (т.е. может составлять величину порядка одного периода). Ширина спектра амплитудной модуляции может значительно превышать частоту сигнала биений. Разделить амплитудную и частотную модуляции в сигнале биений в этом случае практически невозможно. Смещение частоты сигнала биений вверх позволяет легко разделить амплитудную модуляцию сигнала с частотной и подавить амплитудную модуляцию с помощью АРУ.
Работа схемы происходит следующим образом:
Генератор ЛЧМ формирует сигнал, описываемый функцией
 где:
где:
 - амплитуда сигнала
- амплитуда сигнала
 - несущая частота ЛЧМ
- несущая частота ЛЧМ
 - модуляция сигнала по частоте или фазе
- модуляция сигнала по частоте или фазе
Этот сигнал имеет несущую частоту большую, чем необходимая для зондирования на величину ω1. Поэтому этот сигнал сдвигается вниз с помощью смесителя 3 на величину ω1. Сигнал на выходе смесителя 3 описывается выражением.
 где:
где:
Uзонд - напряжение зондирующего сигнала
Uз - напряжение на выходе ЛЧМ
Далее этот сигнал проходит через акустический тракт, где претерпевает глубокую амплитудную  обусловленную свойствами промежуточного слоя (трубы) в местах крепления передающего и приемных датчиков, частотными характеристиками усилителей, частотно-зависимым затуханием в среде и т.д.
обусловленную свойствами промежуточного слоя (трубы) в местах крепления передающего и приемных датчиков, частотными характеристиками усилителей, частотно-зависимым затуханием в среде и т.д.
Сигнал на входах смесителей СМ10 и СМ11 записывается
 где:
где:
 - напряжение амплитудной модуляции первого канала
- напряжение амплитудной модуляции первого канала
τзад10 - задержка первого зондирующего канала
 где:
где:
 - напряжение амплитудной модуляции второго канала
- напряжение амплитудной модуляции второго канала
 - частота генератора
- частота генератора
Где  - амплитудная модуляция сигнала, прошедшего через акустический тракт.
- амплитудная модуляция сигнала, прошедшего через акустический тракт.
Этот сигнал подается на смесители 11 и 12. На второй вход которых подается сигнал генератора ЛЧМ, имеющий несущую частоту большую, чем частота принятых сигналов на величину . На выходах смесителей. Получаем:
С помощью усилителей с АРУ эти сигналы нормируются по амплитуде, т.е. множители на выходах усиливаются с АРУ, принимают значения равные 1.
Нормированные сигналы поступают на смесители выделения низкочастотных сигналов биений


которые затем оцифровываются с целью вычисления параметров τ10 и τ11.
По следующим выражениям:
Скорость потока 
Расход  где:
где:
D - диаметр трубопровода
С - скорость звука в среде измерения
π - число π
α - угол хода лучей
τ1,2 - задержка «по» и «против» потока.
Таким образом, предлагаемое техническое решение соответствует основному экономическому критерию "стоимость - эффективность".
Список литературы
1. М. Ronkin, A. Kamykov и Е. Khrestina, «Frequency Estimation for Short Realization of Radar Signals II. Results of Tests,» Contemporary Engineering Sciences, т. Vol. 7, №№33, p. 1783-1787, 2014.
2. M. Ronkin, A. Kalmmykov и Ε. Khrestina, «Frequency estimation for short realization of radar signals II. Results of tests.,» Contemporary Engineering Sciences, т. 7, №33, p. 1783-1787, 2014.
3. M. Ronkin и A. Kalmykov, «Proceeding of CriMiCo2015:25rd Int. "Crimean Conference Microwave & Telecommunication Technology",» в Investigation of algorithm for measuring short realization of chirp signals, Sevastopol, 2015.
4. С. Костюков и Л.А. Славутский, «РАЗРЕШАЮЩАЯ СПОСОБНОСТЬ УЛЬТРАЗВУКОВОГО УРОВНЕМЕРА С ЦИФРОВОЙ ОБРАБОТКОЙ ЛЧМ СИГНАЛА,» Вестник Чувашского университета, р. 217-221, 2008.
5. S. Hitra, Μ. Kurosawo и Т. Katagiri, «Cross-Correlation by Single-bit Signal Processing for Ultrasonic distance measurement,)) IEICE trans., Fundamentals, Т. 1, №4, p. 1031-1037, 2008.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЛЬТРАЗВУКОВОЙ РАСХОДОМЕР | 2015 |
|
RU2612749C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ГАЗОВОЗДУШНЫХ ГОМОГЕННЫХ ПОТОКОВ | 2022 |
|
RU2791667C1 |
| СИГНАЛИЗАТОР УРОВНЯ ЖИДКОСТИ | 2023 |
|
RU2836446C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОЕЗДА ПО ИНФРАСТРУКТУРЕ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ | 2020 |
|
RU2747818C1 |
| УЛЬТРАЗВУКОВОЙ РАСХОДОМЕР | 2019 |
|
RU2726289C1 |
| РАДИОЛОКАЦИОННО-ТОМОГРАФИЧЕСКАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕТРОВЫХ ПОТОКОВ | 2023 |
|
RU2805031C1 |
| ТРЕХМЕРНАЯ СИСТЕМА ГОЛОГРАФИЧЕСКОГО РАДИОВИДЕНИЯ ДЛЯ ДОСМОТРА | 2017 |
|
RU2652530C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ КОНТРОЛЯ БЕТОННЫХ СООРУЖЕНИЙ | 2023 |
|
RU2805032C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И ПЕЛЕНГАЦИИ НАДВОДНЫХ ДРОНОВ | 2023 |
|
RU2824842C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И УСТРОЙСТВО РАДИОВЫСОТОМЕРА С НЕПРЕРЫВНЫМ ЛЧМ СИГНАЛОМ, ИСПОЛЬЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2550082C1 |
Использование: для ультразвукового измерения параметров жидкостного потока. Сущность изобретения заключается в том, что формируют зондирующий ультразвуковой сигнал с фазокодоманипуляцией в виде, например, кода Баркера, излучают его в область контролируемого потока под углом «по» и «против» потока, принимают отраженные сигналы по двум приемным каналам «по» и «против» потока соответственно, затем последовательно демодулируют, усиливают, детектируют по фазе, интегрируют во времени, оцифровывают и измеряют пролетное время задержки зондирующего сигнала, проходящего через поток по двум каналам, и вычисляют скорость потока и расход по заданным формулам. Технический результат: повышение точности измерения параметров жидкостного потока. 1 ил.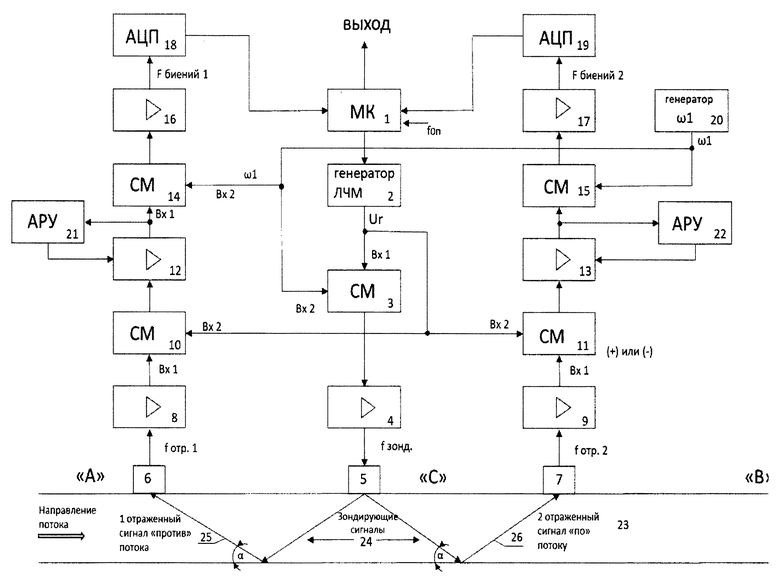
Способ ультразвукового измерения параметров жидкостного потока, основанный на применении сложных фазокодоманипулированных зондирующих сигналов, характеризующийся тем, что формируют зондирующий ультразвуковой сигнал с фазокодоманипуляцией в виде, например, кода Баркера, излучают его в область контролируемого потока под углом «по» и «против» потока, принимают отраженные сигналы по двум приемным каналам «по» и «против» потока соответственно, затем последовательно демодулируют, усиливают, детектируют по фазе, интегрируют во времени, оцифровывают и измеряют пролетное время задержки зондирующего сигнала, проходящего через поток по двум каналам, и вычисляют скорость потока и расход по следующим формулам:
скорость потока:

расход:
где:
D - диаметр трубопровода;
α - угол падения зондирующего сигнала;
τ1 - время задержки этого сигнала по потоку;
τ2 - время задержки этого сигнала против потока;
Vn - скорость потока;
с - скорость звука в среде измерения;
π - число π=3,14.
| СПОСОБ УЛЬТРАЗВУКОВОГО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ГАЗОВОЗДУШНЫХ ГОМОГЕННЫХ ПОТОКОВ | 2022 |
|
RU2791667C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАСХОДА ГАЗА В ТРУБОПРОВОДАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2583167C1 |
| УЛЬТРАЗВУКОВОЙ РАСХОДОМЕР | 2015 |
|
RU2612749C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАСХОДА ГАЗА В ТРУБОПРОВОДАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2313068C2 |
| US 2018010943 A1, 11.01.2018 | |||
| US 2005066744 A1, 31.03.2005. | |||

