Изобретение относится к радиолокации и может быть использовано для обнаружения и пеленгации надводных и полупогруженных дронов с низкой ЭПР (эффективной площадью рассеивания) порядка менее ≤0,5 м2. Эти дроны используются для атаки особо важных объектов: причалы, пирсы, доки, эллинги, корабли на рейде, мосты и пр. (атаки на базу ВМС в Севастополе и в Новороссийске, на Керченский мост). Общей проблемой является своевременное обнаружение надводных дронов и пеленгация для передачи данных их координат (угол азимута, дальность и скорость хода) на береговые батареи поражения.
Военные действия, как показывает опыт двадцатых годов этого века, принимают иногда непредсказуемые формы: от массированных воздушных и артиллерийских ударов и применения мобильных ракет малой и средней дальности (в том числе крылатых ракет и гиперзвуковых) до беспилотных летальных аппаратов (самолетных, вертолетных, квадрокоптеров и вплоть до москитных весом до десятков грамм), а также надводные беспилотники - дроны. Эти все беспилотники показали очень высокую эффективность и меняют лицо войны на поле боя, а средства борьбы с ними достаточно ограничены и к тому же довольно дороги. Заметим, что средства обнаружения малых беспилотников (низколетящих, малоскоростных и радиолокационно почти незаметных) до настоящего времени даже частично не разработаны.
Данное изобретение предназначено в основном для значимых объектов водных акваторий, как военных, так и гражданских, в составе радиолокационного комплекса обнаружения воздушных целей (ракеты, самолеты, БПЛА) и водных целей (корабли, катера и надводные дроны).
Применение надводных дронов имеет давнюю традицию еще до нашей эры, это так называемые брандеры. Наибольшее развитие они получили в эпоху парусного флота. Сейчас они получают новый виток развития по мере совершенствования техники.
Сейчас увеличивается интерес во многих странах мира к надводным дронам, особенно в Китае. К сожалению, Россия вообще не занималась этим вопросом, а ВСУ обладает большим количеством дронов. В этом случае должен возрастать интерес и к средствам их обнаружения и уничтожения.
Вооруженные силы Украины (ВСУ) стали чаще использовать надводные дроны на Черном и Азовском морях в 2023 г.:
- нападение в июле на Керченский мост (разрушен один пролет);
- нападение в июле на большой десантный корабль в Новороссийске (попадание);
- нападение на танкер 08.08.23 около Керченского пролива (попадание);
- попытка напасть на рейд Севастополя 05.08.23 (сбиты).
И еще несколько неудачных попыток.
Надводные дроны представляют собой каботажные малоразмерные скоростные суда (катера) небольшого тоннажа со скоростью хода 30-40 узлов и с GPS-навигацией и управлением от оператора или по программе. Применяются и полупогруженные дроны для уменьшения заметности (визуальной и радиолокационной).
Наиболее близким техническим решением являются РЛС, описанные в книге см. А.А. Лавров и др. «Многолучевые радиолокаторы в составе охранных комплексов», М., Радиотехника, 2017 г.
Приведенные типы РЛС основаны на классическом принципе радиолокации: зондирующий электромагнитный сигнал - отраженный принятый ответ и его алгоритмическая обработка по СПО.
Недостаток приведенных в книге примеров следующий:
- эффективная площадь рассеивания цели должна быть ≥0,5 м2;
- очень сложная алгоритмическая обработка;
- большие погрешности измерения дальности и углов азимута;
- недостаточная помехоустойчивость.
Технической задачей изобретения является повышение вероятности обнаружения надводных дронов с низкой эффективной площадью отражения, а также повышение точности определения координат надводных дронов: угол азимута, дальность и скорость.
Технический результат достигается за счет построения радиолокационной системы обнаружения и пеленгации на основе MIMO сигналов и вычисления координат дронов на аппаратно-программном принципе и математической корреляционной обработке отраженных от цели зондирующих сигналов, причем в качестве отражающих элементов от зондирующих сигналов служат водяные неоднородности спутного следа (турбулентные завихрения).
Для решения поставленной задачи предлагается радиолокационная система обнаружения и пеленгации надводных дронов, основанная на веерном моноимпульсном зондировании заданного сектора контроля, характеризующаяся тем, что в качестве информационной составляющей служат возмущения водной поверхности - новообразования, вызванные спутным следом, а сама система состоит из двух частей: пространственной и внутренней, причем пространственная часть содержит, спутный след, сектор обзора, зондирующие сигналы и отраженные сигналы, внутренняя часть содержит приемно-задающий антенный блок, микроконтроллер, задающий канал, три цифровых приемника, устройство управления и вычисления, система в целом имеет следующие соединения: МК зондирующими сигналами связан со спутным следом, который отраженными сигналами через приемные антенны блока соединен с цифровыми приемниками, выходы которых соединены с входами/выходами МК, а вход/выход которого двунаправленной шиной соединен с входом/выходом устройства управления и вычисления, а выход его является информационным выходом системы.
Таким образом, по сути любую систему с двойной поляризацией можно считать системой MIMO.
Зондирующие электромагнитные сигналы отражаются от водных возмущений (турбулентности), вызванных движением дрона, это две составляющих: от двигателя - это гребной винт или водомет и от сопротивления воды носовой части и боковых частей корпуса, причем возмущение прямо пропорционально скорости дрона и его тоннажу. РЛС при отсутствии дрона получает отраженный сигнал от водной поверхности очень малой величины (зависит от волнения водной среды), а при наличии спутного следа отраженные сигналы достаточно велики и хорошо подвергаются цифровой обработке и по ней интерполируется истинное положение дрона: дальность, скорость, курсовой угол.
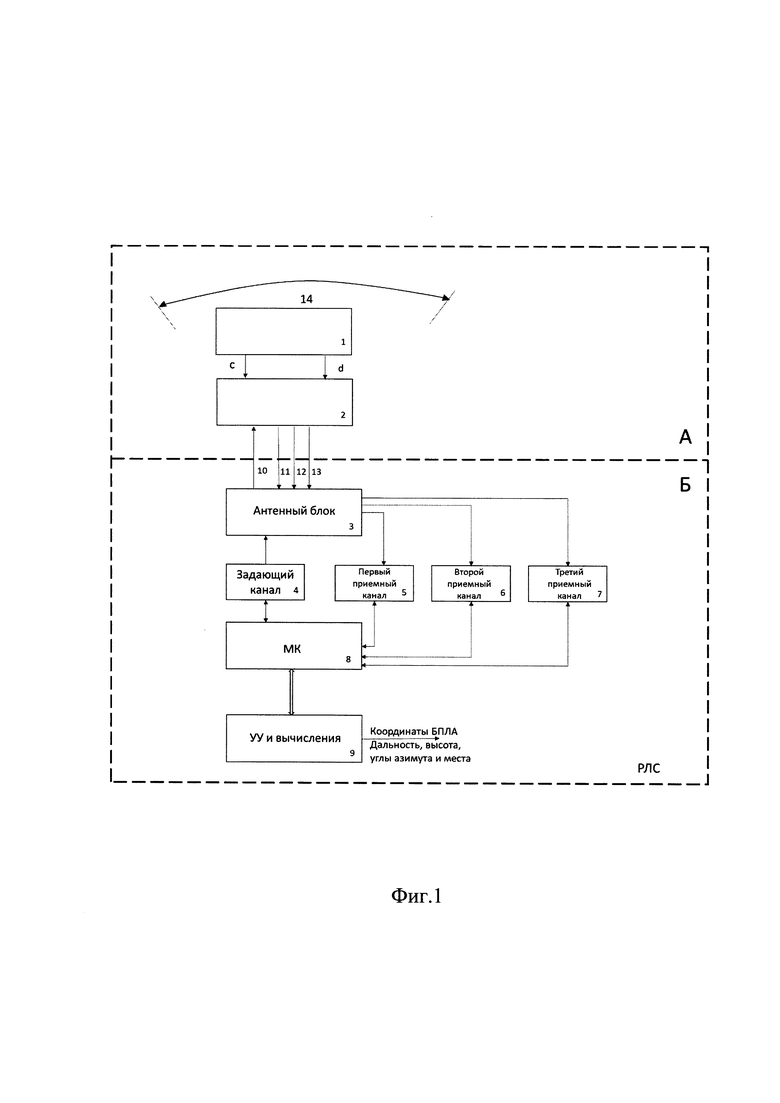
На фиг. 1 показана укрупненная структурно-электрическая схема способа, на которой изображено:
А - пространственная часть;
Б - внутренняя часть - РЛС;
1 - надводный дрон;
2 - спутный след от надводного дрона (СС).
Внутренняя часть Б содержит:
3 - приемо-задающий антенный блок (задающий канал и три разнесенных приемных канала);
4 - задающий канал;
5, 6, 7 - три цифровых приемника;
8 - микроконтроллер (МК);
9 - устройство управления и вычисления;
10 - зондирующие сигналы;
11, 12 и 13 - отраженные от СС сигналы;
14 - сектор обзора РЛС (контроля);
с - спутный вихревой след от движителя винт, водомет);
d - спутный волновой след от носа и корпуса.
Схема имеет следующие соединения:
МК 8 через задающий канал 4 и антенный канал 3 зондирующими сигналами 10 связан со спутным следом 2, который отраженными сигналами 11, 12 и 13 через приемные антенны блока 3 соединен с цифровыми приемниками 5, 6 и 7 соответственно, выходы которых соединены с входами/выходами МК 8, а вход/выход которого двунаправленной шиной соединен с входом/выходом устройства управления и вычисления 9, выход его является информационным выходом системы.
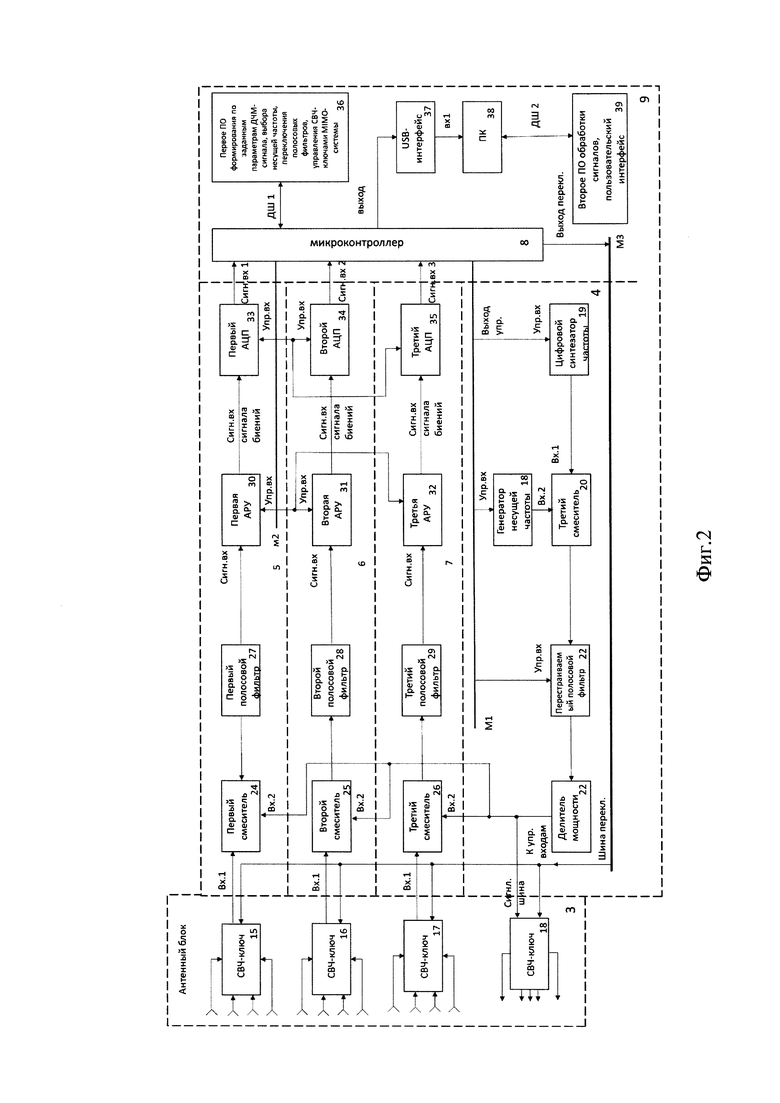
На фиг. 2 показана структурно-электрическая схема РЛС системы, на которой изображено:
3 - антенный блок, в него входят:
4 - задающий канал;
5, 6 и 7 - первый, второй и третий приемные каналы соответственно;
8 - МК;
9 - устройство управления и вычисления (УУ и В);
15, 16 и 17 - приемные переключающие СВЧ-ключи;
18 - передающий переключающий ключ В, задающий канал 4 входит:
18 - генератор несущей частоты (ГНЧ);
19 - цифровой синтезатор частоты (ЦСЧ);
20 - третий смеситель;
21 - перестраиваемый полосовой фильтр (ППФ);
22 - делитель мощности.
В первый, второй и третий приемные каналы 5, 6 и 7 соответственно входят:
23-М1, 23-М2, 23-М3 - магистральные шины (МШ);
24, 25, 26 - смесители первого, второго и третьего каналов соответственно;
27, 28, 29 - полосовые фильтры первого, второго и третьего каналов соответственно;
30, 31, 32 - АРУ первого, второго и третьего каналов соответственно;
33, 34, 35 - АЦП первого, второго и третьего каналов соответственно.
В УУ и В 9 входят:
36 - первое программное обеспечение;
37 - USB-интерфейс;
38 - процессор (ПК);
39 - второе ПО.
Источник питания условно не показан.
Схема имеет следующие соединения.
Выход управления МК 8 магистральной шиной 23-M1 связан с управляющими входами ЦСЧ 19 и ППФ 21, а через ГНЧ 18 соединен с вторым входом третьего смесителя 20, с первым входом которого соединен выход ЦСЧ 19, выход третьего смесителя через ППФ 21 соединен с делителем мощности, выход последнего сигнальной шиной соединен с СВЧ-ключом 18 и со вторыми входами первого, второго и третьего смесителя; выход управления МК 8 через МШ 23-М3 соединен с управляющими входами СВЧ-ключей 15, 16, 17 и 18; выходы СВЧ-ключей 15, 16 и 17 соединены с первыми входами смесителей 24, 25 и 26 соответственно; выходы которых через полосовые фильтры 27 28 и 29 соответственно соединены с сигнальными входами АРУ 30, 31 и 32, с управляющими входами которых соединен выход управления с МК 8 МШ 23-М2, выходы АРУ 30, 31 и 32 соединены с сигнальными входами АЦП 33, 34 и 35 соответственно, а с их управляющими входами соединен выход управления с МК 8 через МШ 23-М2; первое ПО 36 первой двунаправленной шиной ДТП 1 соединен с МК 8, выход которого через USB-интерфейс 37 соединен с входом ПК 38, с которым также соединено двунаправленной шиной ДШ 2, а выход ПК 38 является выходом системы.
В основу работы системы положен комплексный подход, а именно:
- применение многолучевой РЛС для контроля наблюдаемого контролируемого пространства путем его сканирования веером лучей диаграммы направленности;
- обеспечение дальности действия по малоразмерным надводным дронам 10-15 км достаточно средней мощности излучения передатчика Рср=50-100 Вт, что вполне технически реализуемо;
- применение в качестве многолучевой РЛС ее разновидностей MIMO-системы (Multy output-Multy input: много выходов-много входов);
- применение структурного решения в виде РЛС с одной задающей и трех приемных плоских ФАР антенн, разнесенных в пространстве, что исключает механический электропривод;
- вычисления 3-мерной корреляционной функции приемных трактов на основе корреляционной гетеродинной обработки отраженных сигналов;
- в качестве отражающих элементов используется спутный след от движения надводного дрона, по которому строится траектория его движения, а начало спутного следа это и есть координаты БПЛА.
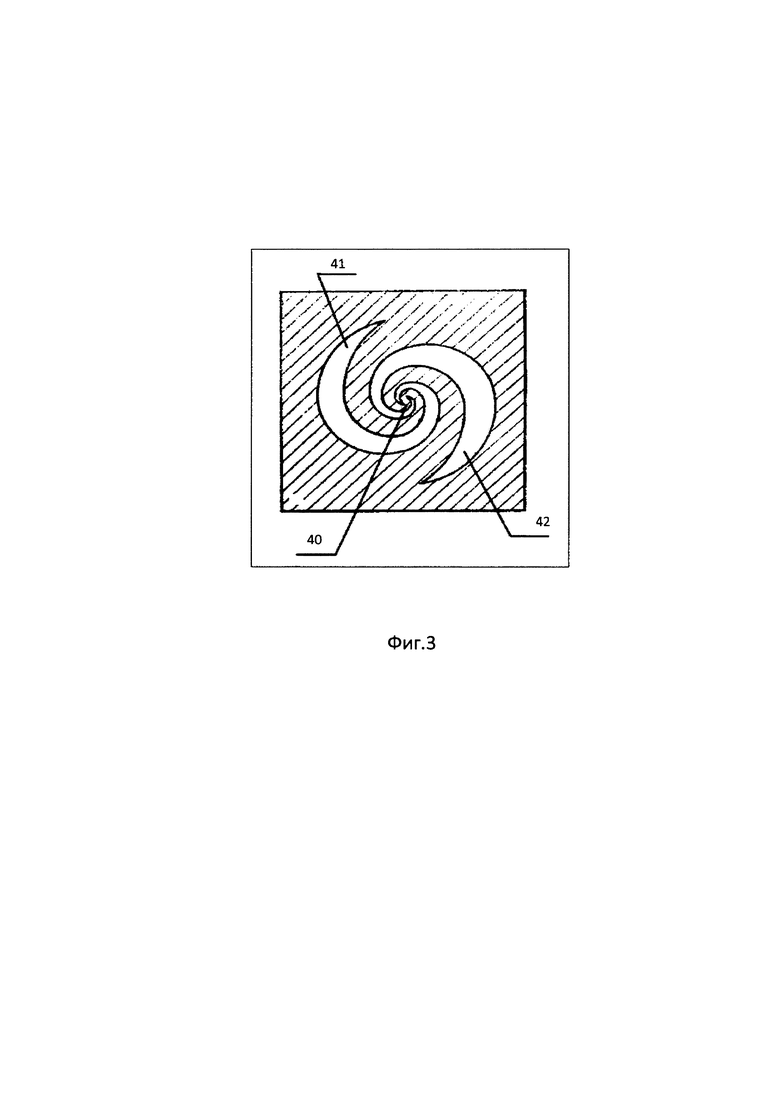
На фиг. 3 показано выполнение элемента передающей и приемной антенны изображено:
41 и 42 - витки спиральной антенны;
40 - точка возбуждения антенны.
В качестве элемента антенной системы используется антенна в виде спирального элемента (предпочтительнее). Эта антенна является широкополосной, имеет независимый от частоты фазовый центр, обладает небольшими габаритами, максимальной развязкой между передающей и приемной антеннами, наименьшей глубиной и наименьшей чувствительностью параметров к расстоянию между плоскостью антенны и целью. Также в качестве элемента антенной системы могут применяться и другие конструктивы, например, одновитковые катушки.
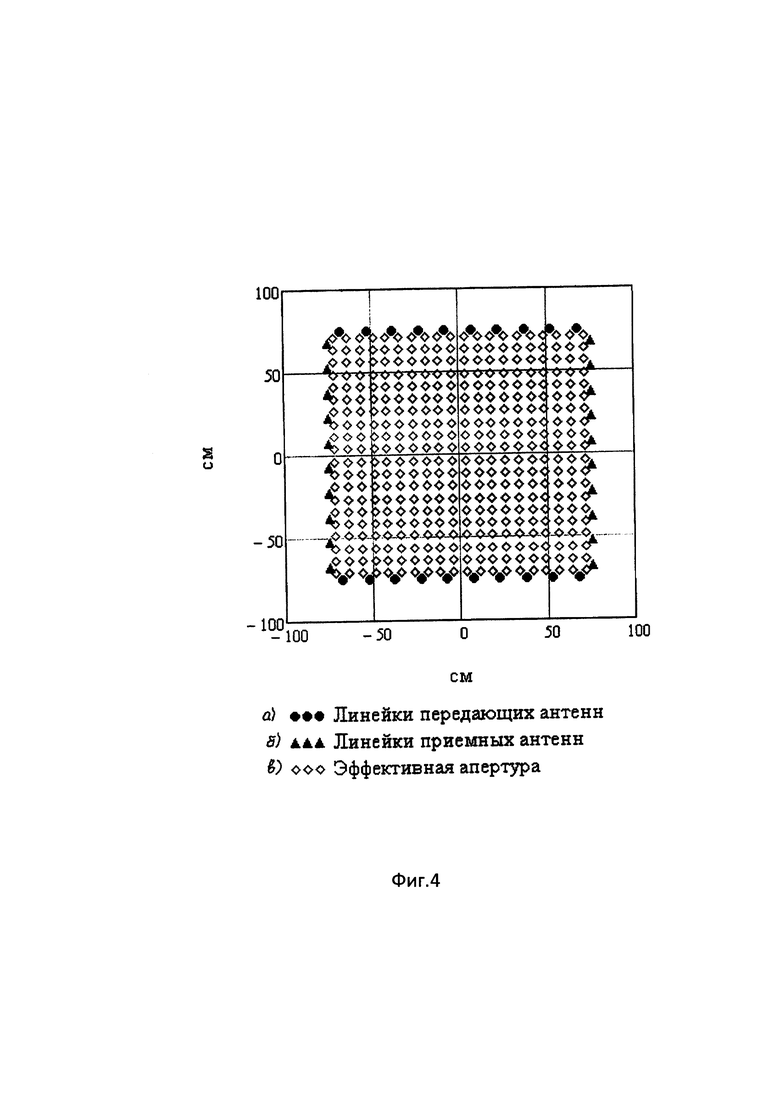
На фиг. 4 показано в общем количестве двадцати приемных элементов и двадцать передающих, это количество может быть различным, все зависит от нужной разрешающей способности.
Это показано для совмещенной антенной решетки, т.е. в ней одновременно размещены излучатели для передачи и для приема. В данном изобретении в передающем канале только излучатели на передачу, а в трех приемных - только на прием. Расположение излучателей в этих решетках определяется заданной апертурой.
В основу работы системы положен принцип широкополосного радиолокатора с синтезированной апертурой; зондирующий сигнал с линейно-частотной модуляцией; корреляционно-фильтровая обработка отраженного сигнала; внутренняя когерентность системы; голографический синтез 3D изображений. Это позволяет получить высокую разрешающую способность по дальности и высокое угловое разрешение за счет синтеза апертуры при использовании малогабаритных антенн в составе MIME-линеек или матриц (MIMO - это Multiple Input - Multiple Output, множественный вход - множественный выход).
В структурной схеме реализован принцип корреляционно-фильтровой обработки отраженного сигнала с обобщенным гетеродинированием. В данной структуре источник формирования непрерывного ЛЧМ-сигнала, под управлением микроконтроллера 8, является прямой цифровой синтез на синтезаторе частоты 19, генераторе несущей частоты 18 и смесителе 20, на выходе которого и формируется непрерывный ЛЧМ-сигнал с заданными параметрами.
Сигнал с ЛЧМ относится к классу «сложных» сигналов, для которых база сигнала В=Δf*Т, где Δf - ширина спектра, Т - длительность.
Такие сигналы характеризуются возможностью сжатия во времени (по дальности) при приеме в базу. Например, сигнал ЛЧМ с девиацией Δf=1 ГТц и Т=10 мс эквивалентен по разрешению простому радиоимпульсу.
Цифровой синтезатор частоты 19 формирует на своем выходе синусоидальное гармоническое колебание с линейно изменяющейся со временем частотой в пределах от 10 МГц до 1400 МГц. Точный частотный диапазон и период формирования ЛЧМ-сигнала задается в программе под управлением микроконтроллера 8.
Генератор несущей частоты 18 на своем выходе формирует синусоидальное гармоническое колебание СВЧ-диапазона в пределах от 1 ГБц до 14 ГБц. Конкретный выбор несущей частоты задается в программе 36 под управлением микроконтроллера 8.
Перестраиваемый полосовой фильтр 21 отфильтровывает нужный частотный диапазон и перестраивается вместе с несущей частотой под управлением микроконтроллера 8.
Одной из особенностей данной структурной схемы является наличие трех идентичных параллельно работающих приемных каналов. В каждом из каналов на выходе смесителя 24, 25 и 26 определяющий рабочий диапазон системы по дальности (минимальное и максимальное расстояние), затем перед АЦП 33, 34 и 35 стоят АРУ 30, 31 и 32 (автоматическая регулировка усиления), задача которых автоматически подстраивать амплитуды входных сигналов под рабочий диапазон АЦП. Существенной особенностью способа является сканирование пространства с помощью антенной системы, состоящей из четырех передающих антенн 18 и двенадцати приемных антенн, которые при помощи СВЧ-ключей 15, 16 и 17 под выход под ключ передатчика (передающие антенны) и каждому входу приемника (приемные антенны).
В системе применяются технология радиолокационного сканирования непрерывным широкополосным зондирующим сигналом, технология многоканальной голографической обработки сигналов обратного рассеяния и технология построения трехмерных изображений объектов в реальном времени.
Отличительной особенностью предлагаемых решений является использование более низких зондирующих частот при сохранении требуемого разрешения. На фиг. 2 показаны СВЧ-ключи на 4 входа и 4 выхода, конечно, при необходимости можно эти значения кратно увеличить.
Обработанные отраженные сигналы с выходов приемных каналов 5, 6 и 7 принимаются МК 8 и передаются через USB-интерфейс 37 в процессор (ПК) 38, где производятся операции обработки этих сигналов с помощью второго ПО 39 и выдаются в виде дальности, скорости, угловых координат дрона.
Такое построение системы позволяет обнаружить и пеленговать надводные дроны с высокой степенью вероятности при малых ГМХ и низкой излучаемой средней мощности.
Таким образом, данное техническое решение соответствует основному экономическому постулату «стоимость-эффективность».
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ПЕЛЕНГАЦИИ НАДВОДНЫХ ДРОНОВ | 2023 |
|
RU2828006C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ОХРАНЫ ВОЗДУШНОГО ПЕРИМЕТРА | 2023 |
|
RU2824853C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОЕЗДА ПО ИНФРАСТРУКТУРЕ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ | 2020 |
|
RU2747818C1 |
| СПОСОБ ПУТЕВОЙ НАВИГАЦИИ И ОБЗОРА ПЕРЕДНЕЙ ПОЛУСФЕРЫ ЛОКОМОТИВА ПО ГЕОМЕТРИИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2018 |
|
RU2679491C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ МАЛОСКОРОСТНЫХ И МАЛОРАЗМЕРНЫХ БПЛА | 2021 |
|
RU2795472C2 |
| РАДИОЛОКАЦИОННО-ТОМОГРАФИЧЕСКАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕТРОВЫХ ПОТОКОВ | 2023 |
|
RU2805031C1 |
| ТРЕХМЕРНАЯ СИСТЕМА ГОЛОГРАФИЧЕСКОГО РАДИОВИДЕНИЯ ДЛЯ ДОСМОТРА | 2017 |
|
RU2652530C1 |
| СИСТЕМА ВИЗУАЛИЗАЦИИ ВВЕДЕННОГО ИМПЛАНТАТА | 2019 |
|
RU2726595C1 |
| СИСТЕМА РАДИОЛОКАЦИОННОГО БЕСКОНТАКТНОГО КОНТРОЛЯ БЕТОННЫХ И ЖЕЛЕЗОБЕТОННЫХ КОНСТРУКЦИЙ | 2022 |
|
RU2801787C1 |
| СПОСОБ ТРЕХМЕРНОЙ ПУТЕВОЙ НАВИГАЦИИ В АВТОМАТИЗИРОВАННОЙ ПОМОЩИ УПРАВЛЕНИЕМ ГРУЗО-ПОДЪЕМНО-ТРАНСПОРТНЫМИ МЕХАНИЗМАМИ | 2018 |
|
RU2727325C2 |
Изобретение относится к радиолокации и может быть использовано для обнаружения и пеленгации надводных и полупогруженных дронов с низкой эффективной площадью рассеивания (ЭПР) менее 0,5 м2. Техническим результатом изобретения является повышение вероятности обнаружения надводных дронов с низкой ЭПР, а также повышение точности определения координат надводных дронов: угла азимута, дальности и скорости. Заявленная радиолокационная система (РЛС) обнаружения и пеленгации основана на MIMO-сигналах, отраженных от цели зондирующих сигналов, причем в качестве отражающих элементов от зондирующих сигналов служат водяные неоднородности спутного следа (турбулентные завихрения). Многолучевая РЛС состоит из двух частей: пространственной и внутренней. Пространственная часть содержит спутный след, сектор обзора, зондирующие сигналы и отраженные сигналы. Внутренняя часть содержит приемно-задающий антенный блок в виде одной передающей и трех разнесенных приемных плоских фазированных антенных решеток (ФАР), микроконтроллер (МК), задающий канал, три цифровых приемника и устройство управления и вычисления. 1 з.п. ф-лы, 4 ил.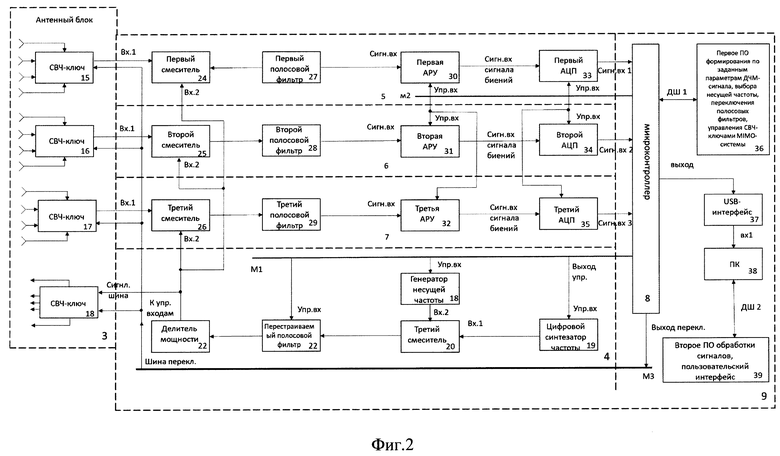
1. Радиолокационная система обнаружения и пеленгации надводных дронов на основе системы Multiple Input-Multiple Output (MIMO, множественный вход-множественный выход), основанная на веерном моноимпульсном зондировании заданного сектора контроля, характеризующаяся тем, что в качестве информационной составляющей служат возмущения водной поверхности – новообразования, вызванные спутным следом надводного дрона, а сама многолучевая РЛС состоит из двух частей: пространственной и внутренней, причем пространственная часть содержит спутный след, сектор обзора, зондирующие сигналы и отраженные сигналы, внутренняя часть подразделяется на четыре основные части: приемно-задающий антенный блок в виде одной передающей и трех разнесенных приемных плоских фазированных антенных решеток (ФАР), микроконтроллер (МК), задающий канал, три цифровых приемника и устройство управления и вычисления, при этом система имеет следующие соединения: МК зондирующими сигналами связан со спутным следом, который отраженными сигналами через приемные антенны антенного блока соединен с цифровыми приемниками, выходы которых соединены с входами/выходами МК, вход/выход которого двунаправленной шиной соединен с входом/выходом устройства управления и вычисления, выполненного в виде процессора (ПК), осуществляющего операции корреляционной гетеродинной обработки отраженных сигналов и вычисления дальности, скорости и угловых координат надводных дронов с помощью первого и второго программного обеспечения (ПО) для построения траектории движения надводного дрона, координатами местоположения которого является начало спутного следа, а выход устройства управления и вычисления является информационным выходом системы.
2. Радиолокационная система по п. 1, отличающаяся тем, что она содержит узлы и блоки со следующими соединениями: микроконтроллер первой магистральной шиной связан с управляющими входами перестраиваемого полосового фильтра, цифрового синтезатора частоты и через генератор несущей частоты со вторым входом третьего смесителя, с первым входом которого связан выход синтезатора частоты, а смеситель частоты через сигнальный вход перестраиваемого третьего полосового фильтра и через делитель мощности связан вторыми входами первого и второго смесителей приемного тракта с сигнальными входами третьего и четвертого СВЧ-ключа, выходы первого и второго СВЧ-ключей связаны с первыми входами первого и второго смесителей соответственно, МК магистральной шиной связан с управляющими входами всех четырех СВЧ-ключей, выход первого смесителя через первый полосовой фильтр, автоматический регулятор усиления (АРУ) и первый аналого-цифровой преобразователь (АЦП) соединен с первым сигнальным входом МК, а выход второго смесителя через второй полосовой фильтр, второй АРУ и второй АЦП соединен с вторым сигнальным входом МК, выход МК второй магистральной шиной соединен с управляющими входами первого и второго АРУ, а входами тактовой частоты, пуска и считывания данных соединен с обоими АЦП, МК двунаправленной шиной соединен с первым ПО, а однонаправленной шиной посредством USB-интерфейса соединен с ПК, выход которого двунаправленной шиной соединен со вторым ПО обработки сигналов, причем одна передающая и три разнесенные приемные плоские ФАР выполнены находящимися в одной плоскости на минимальном расстоянии друг к другу, равном 1,0 метру.
| АНТЕННАЯ РЕШЕТКА MIMO С ШИРОКИМ УГЛОМ ОБЗОРА | 2018 |
|
RU2695934C1 |
| МНОГОКАНАЛЬНОЕ АДАПТИВНОЕ РАДИОПРИЕМНОЕ УСТРОЙСТВО | 2011 |
|
RU2449473C1 |
| ВСЕНАПРАВЛЕННЫЙ РАДИОПЕЛЕНГАТОР | 2001 |
|
RU2208808C2 |
| СИСТЕМА РАДИОЛОКАЦИОННОГО БЕСКОНТАКТНОГО КОНТРОЛЯ БЕТОННЫХ И ЖЕЛЕЗОБЕТОННЫХ КОНСТРУКЦИЙ | 2022 |
|
RU2801787C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ПОДВОДНЫХ И НАДВОДНЫХ ОБЪЕКТОВ | 2017 |
|
RU2670176C1 |
| ВАННА К УСТАНОВКЕ ДЛЯ ИЗГОТОВЛЕНИЯ ЛИСТОВОГО ПОЛИРОВАННОГО СТЕКЛА | 1967 |
|
SU216187A1 |
| ДАНГ Х.Б., КУАН Ч.Т | |||
| Радар с фазированной решеткой и MIMO: характеристики радара с фазовой решеткой и радара MIMO // Международный научно-исследовательский журнал | |||
| Способ регенерирования сульфо-кислот, употребленных при гидролизе жиров | 1924 |
|
SU2021A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |

