Изобретение относится к устройствам для измельчения, представляющим собой барабанные мельницы с одним или несколькими измельчающими органами, располагаемыми в барабане, и может применяться для размола гипсокартона и его сепарации на фракции различного размера.
Из уровня техники известен дезинтегратор для измельчения и смешения различных материалов (RU 2687583 C1, МПК B02C 13/14, опубл. 15.05.2019). Дезинтегратор содержит цилиндрический корпус с осевым загрузочным и тангенциальным разгрузочным устройствами, размещенные в корпусе с возможностью встречного вращения вертикальные диски с жестко закрепленными на них рядами ударных элементов, каждый из которых расположен между рядами ударных элементов противолежащего диска, осевое загрузочное устройство выполнено в виде двух полых горизонтальных шнековых валов, жестко соединенных с дисками.
Недостатком известного технического решения является отсутствие в его конструкции привода вращательного движения, что ограничивает возможность автоматизации технологического процесса измельчения строительного материала с его помощью.
Наиболее близким техническим решением к заявленному изобретению и выбранным в качестве прототипа признана вибрационная мельница для тонкого помола различных материалов, которая может быть использована в строительной промышленности (RU 2637215 C1, МПК B02C 17/00, опубл. 01.12.2017). Мельница содержит цилиндрическую помольную камеру, заполненную мелющими телами, установленную с помощью упругих элементов на неподвижном основании, жестко соединенную с боковыми дебалансными виброприводами, расположенными на ее диаметрально противоположных сторонах в плоскости поперечной симметрии помольной камеры, каждый из которых состоит из валов с приводами, выполненными с возможностью независимого изменения угловой скорости и направления вращения, и дебалансов, масса которых может изменяться.
Недостатком мельницы является отсутствие в ее конструкции узлов, позволяющих сепарировать помол на фракции различного размера. Кроме того в конструкции мельницы не предусмотрены элементы автоматики, что ограничивает ее возможности по управлению скоростью вращения помольной камеры и, соответственно, размерами частиц помола.
Технической задачей, на решение которой направлено заявленное изобретение, является разработка конструкции устройства для помола строительных материалов с одновременной сепарацией помола и разделением их на составляющие их компоненты. Так, например, для перерабатываемого гипсокартона такими компонентами будут бумага и гипс.
Указанная задача решена тем, что дезинтегратор содержит приемную емкость, внутри которой установлены вибросита, каждое из которых снабжено вибродвигателем, в нижней части корпуса приемной емкости выполнено разгрузочное отверстие, на фланце верхней части корпуса приемной емкости закреплена помольная камера с размещенным внутри нее измельчителем, выполненным в виде ножевого блока, закрепленного на роторе, при этом нижний торец помольной камеры выполнен в виде перфорированной разгрузочной решетки, а верхний торец представляет собой приемное окно, на фланце которого закреплен загрузочный бункер. Ротор блока регулируемых ножей установлен в помольной камере в подшипниковых узлах и связан ременной передачей с валом электродвигателя, вращающего упомянутый блок. Вибросита кинематически и механически соединены с накопительными емкостями, снабженными тензометрическими датчиками, при этом выходы датчиков подключены к измерительным входам блока управления, силовые выходы которого подключены к вибродвигателям и электродвигателю, вращающему ножевой блок.
Положительным техническим результатом, обеспечиваемым раскрытой выше совокупностью признаков устройства, является повышение технологичности дезинтегратора за счет применения в конструкции устройства тензометрических датчиков, вибродвигателей вибросит и электродвигателя, вращающего ножевой блок, подключенных к блоку управления, что обеспечивает возможность автоматизации технологического процесса помола гипсокартона. Кроме того, применение в конструкции дезинтегратора вибросит и разгрузочного отверстия обеспечивает расширение функциональных возможностей устройства за счет возможности сепарации помола.
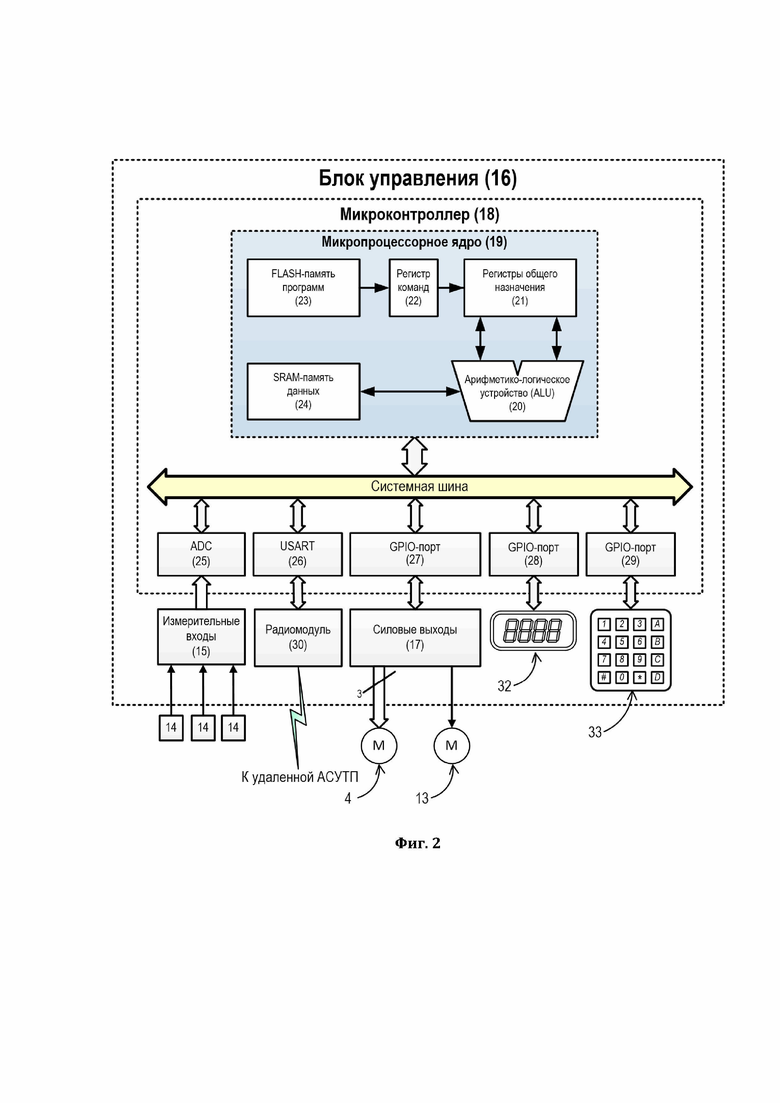
Изобретение поясняется чертежами, где на фиг. 1 представлена схема установки, а на фиг. 2 приведена структурная схема блока управления дезинтегратором.
Дезинтегратор гипсокартона для получения сырья для производства лакокраски устроен следующим образом.
Его основой является рама 1, на которой закреплена приемная емкость 2, внутри которой установлены самоочищающиеся вибросита 3, снабженные вибродвигателями 4, в нижней части корпуса приемной емкости 2 выполнено разгрузочное отверстие 5, на фланце 6 верхней части корпуса приемной емкости 2 закреплена помольная камера 7 с размещенным внутри нее измельчителем, выполненным в виде ножевого блока 8, закрепленного на роторе 9, при этом нижний торец помольной камеры 7 выполнен в виде перфорированной разгрузочной решетки, а верхний торец представляет собой приемное окно 10, на фланце которого закреплен загрузочный бункер 11. Ротор 9 установлен в помольной камере 7 в подшипниковых узлах и связан ременной передачей 12 с валом электродвигателя 13, вращающего ножевой блок 8. Вибросита 3 кинематически и механически, например с помощью шнековых транспортеров, соединены с накопительными емкостями (на фигурах условно не показаны), снабженными тензометрическими датчиками 14, при этом выходы датчиков подключены к измерительным входам 15 блока управления 16, силовые выходы 17 которого подключены к вибродвигателям 4 и электродвигателю 13, вращающему ножевой блок 8.
Ножевой блок 8 может состоять из основания, на котором равномерно по окружности механически закреплены три ножа, регулируемых по высоте вдоль оси, перпендикулярной продольной оси ротора, а в приемной емкости 2 могут быть установлены, по крайней мере, три вибросита 3, расположенные друг над другом, при этом размеры ячеек поддонов очистки сит (просеивающих элементов) уменьшаются от верхнего сита к нижнему и составляют для первого вибросита 0,5 мм, для второго сита 0,3 мм и для третьего сита 0,1 мм, при этом на первом сите крупная фракция измельченных отходов, которая затем отправляется на домалывание, на втором сите скапливается фракция, частицы которой не превышают в размере 0,5 мм, а на третьем сите скапливается фракция, размеры частиц которой не превышают 0,3 мм; для автоматической очистки вибросита 3 снабжены очистными кольцами, с размещенными в них очистными шарами, при этом упомянутые кольца равномерно закреплены на поддонах очистки вибросит.
Блок управления 16 может быть выполнен на основе микроконтроллера 18, содержащего микропроцессорное ядро 19, включающее в себя арифметико-логическое устройство (ALU) 20, регистры общего назначения 21, регистр команд 22, FLASH-память программ 23 и SRAM-память данных 24, подключенное с помощью системной шины к периферийным устройствам микроконтроллера, а именно к многоканальному аналого-цифровому преобразователю (ADC) 25, универсальному синхронно-асинхронному приемопередатчику (USART) 26 и универсальным двунаправленным GPIO-портам ввода-вывода 27, 28, 29. К линиям аналого-цифрового преобразователя (ADC) 25 подключены измерительные входы 15 блока управления 16, к универсальному синхронно-асинхронному приемопередатчику (USART) 26 подключен радиомодуль 30, с помощью которого блок управления 16 может принимать команды от удаленной автоматизированной системы управления технологическими процессами (АСУТП); линии первого GPIO-порта 27 подключены к силовым выходам 17 блока управления, а выходы второго и третьего GPIO-портов 28, 29 подключены, соответственно, к линейке семисегментных индикаторов 32 и управляющим кнопкам 33, которые могут быть сгруппированы в шестнадцатикнопочную клавиатуру, при этом индикаторы 32 и кнопки 33 закреплены на внешней поверхности корпуса (на фигурах условно не показан) блока управления, при этом сам корпус закреплен на раме 1 дезинтегратора.
Измерительные входы блока управления могут быть выполнены на основе операционных усилителей, а силовые выходы на основе транзисторных ключей, подключенных по схеме Дарлингтона. В качестве микроконтроллера блока управления может быть использована микросхема Atmel AVR ATMega128L, представляющая собой высокопроизводительный восьмиразрядный микроконтроллер.
Дезинтегратор гипсокартона для получения сырья для производства лакокраски используют следующим образом.
Устройство позволяет одновременно дробить и сепарировать такие отходы производства, как обломки гипсокартона.
Первоначально устройство собирают, устанавливая и закрепляя на раме 1 приемную емкость 2, в которую устанавливают вибросита 3. На фланце 6 приемной емкости 2 устанавливают и закрепляют помольную камеру 7, в подшипниковых узлах которой закрепляют ротор 9 ножевого блока 8, соединяя ротор ременной передачей с валом электродвигателя 13 и регулируя высоту вылета ножей блока. На фланце приемного окна 10 помольной камеры 7 закрепляют загрузочный бункер 11. Вибросита 3 соединяют посредством шнековых транспортеров c накопительными емкостями, тензометрические датчики 14 которых подключают к измерительным входам 15 блока управления 16, а силовые выходы 17 последнего подключают вибродвигателям 4, установленным на виброситах, и электродвигателю 13 ножевого блока 8. После выполнения указанных операций устройство готово к использованию.
Перед началом технологического процесса измельчения отходов гипсокартона оператор установки с помощью управляющих кнопок 33, ориентируясь на информацию выводимую блоком управления 16 на индикаторы 32, настраивает требуемую скорость вращения валов вибродвигателей 4 и электродвигателя 13, затем устанавливает максимально возможный вес измельченного сырья в накопительных емкостях, измеряемый тензометрическими датчиками 14, при котором блок управления будет автоматически останавливать процесс переработки. После выполнения указанных действий с помощью блока управления 16 активируют устройство.
При работе дезинтегратора твердые отходы гипсокартона подают в загрузочный бункер 11, откуда они попадают в помольную камеру 7, где измельчаются ножевым блоком 8. Измельчение происходит за счет резания - сдвиговых деформаций, обеспечиваемых неподвижными ножами 34 и подвижными вращающимися ножами блока 8. Измельченные отходы через перфорированную разгрузочную решетку попадают на вибросита 3 приемной емкости 2. На виброситах 3 измельченные отходы разделяются на фракции, отличающиеся размером частиц, после чего они подаются за счет наклона вибросит и их вибрации в накопительные емкости. При этом на первом вибросите остаются крупные фракции и бумага, которые отправляют затем на повторную переработку, а на втором и третьем ситах остаются фракции с размером частиц 0,5 и 0,3 мм, пригодные для использования в качестве сырья для производства лакокраски. Остаток в виде тонкодисперсного песка удаляется из приемной емкости 2 через разгрузочное отверстие 5.
Во все время работы установки микропроцессорное ядро 19 микроконтроллера 18 на основе управляющей программы, хранящейся во FLASH-памяти программ, с использованием SRAM-памяти 24 для буферизации данных осуществляет формирование ШИМ-сигналов, управляя вибродвигателями 4 и электродвигателем 13. Одновременно с этим микроконтроллером 18 осуществляется итерационный опрос тензометрических датчиков 14 с помощью аналого-цифрового преобразователя 25, измеряющих веса отходов в накопительных емкостях, текущие значения которых отображаются на индикаторах 32. При достижении максимально возможного веса отходов в одной из накопительных емкостей блок управления автоматически отключает двигатели 3 и 13 установки. Остановку может также остановить вручную оператор, подав команду на отключение двигателей с помощью управляющих кнопок 33 блока управления 16.
Таким образом, рассмотренный в настоящей заявке дезинтегратор, является высокотехнологичным устройством, позволяющим отделить из отходов гипсокартона гипс, связующее и волокнистую бумагу, при этом полученный таким образом гипс может использоваться в дальнейшем для производства краски как инертный наполнитель. Регулируемые ножи устройства позволяют получить нужный размер фракций измельченных отходов, что облегчает дальнейшее использование этого сырья, а блок управления 16 обеспечивает автоматизацию процесса измельчения и сепарации отходов, управляя электродвигателем 14 и вибродвигателями 4 вибросит 3 на основе управляющей программы микроконтроллера, хранящейся в его FLASH-памяти программ 23.
| название | год | авторы | номер документа |
|---|---|---|---|
| Линия для производства сырья для флокового декоративного покрытия | 2024 |
|
RU2825010C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕЛЬЧЕНИЯ ПИВНОЙ ДРОБИНЫ И ПРОИЗВОДСТВЕННАЯ ЛИНИЯ ДЛЯ ПОЛУЧЕНИЯ ПРОДУКТА С ВЫСОКИМ СОДЕРЖАНИЕМ БЕЛКА | 2020 |
|
RU2729826C1 |
| ТЕХНОЛОГИЧЕСКАЯ ЛИНИЯ ДЛЯ ОБОГАЩЕНИЯ ГОРНЫХ ПОРОД | 1993 |
|
RU2057594C1 |
| БЕЛКОВАЯ СУСПЕНЗИЯ ИЗ ПИВНОЙ ДРОБИНЫ, СПОСОБ И УСТАНОВКА ДЛЯ ЕЕ ПОЛУЧЕНИЯ | 2019 |
|
RU2719508C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕЛЬЧЕНИЯ РЕЗИНОВЫХ ШИН | 1991 |
|
RU2022788C1 |
| БЕЛКОВЫЙ ПРОДУКТ ИЗ ПИВНОЙ ДРОБИНЫ И СПОСОБ ЕГО ПОЛУЧЕНИЯ | 2020 |
|
RU2730134C1 |
| ВИБРАЦИОННОЕ СИТО ВЫСОКОЧАСТОТНОЕ ДЛЯ ИНТЕНСИВНОЙ ОЧИСТКИ БУРОВОГО РАСТВОРА И ОСУШКИ ШЛАМА | 2014 |
|
RU2541675C1 |
| ВИБРОСИТО РЕЗОНАНСНОЕ | 2004 |
|
RU2288786C2 |
| МЕЛ ХИМИЧЕСКИ ОСАЖДЕННЫЙ | 2000 |
|
RU2156736C1 |
| СПОСОБ ПОЛУЧЕНИЯ ХИМИЧЕСКИ ОСАЖДЕННОГО МЕЛА | 2000 |
|
RU2156737C1 |

Изобретение относится к устройствам для измельчения. Устройство содержит приемную емкость (2), внутри которой установлены вибросита (3), каждое из которых снабжено вибродвигателем (4). В нижней части корпуса приемной емкости выполнено разгрузочное отверстие (5). На фланце (6) верхней части корпуса приемной емкости закреплена помольная камера (7) с размещенным внутри нее измельчителем, выполненным в виде ножевого блока (8), закрепленного на роторе (9). При этом нижний торец помольной камеры выполнен в виде перфорированной разгрузочной решетки, а верхний торец представляет собой приемное окно (10), на фланце которого закреплен загрузочный бункер (11). Ротор блока регулируемых ножей установлен в помольной камере в подшипниковых узлах и связан ременной передачей (12) с валом электродвигателя (13), вращающего ножевой блок. Вибросита кинематически и механически соединены с накопительными емкостями, снабженными тензометрическими датчиками, при этом выходы датчиков подключены к измерительным входам блока управления, силовые выходы которого подключены к вибродвигателям и электродвигателю, вращающему ножевой блок. Повышается технологичность и расширяются его функциональные возможности дезинтегратора. 5 з.п. ф-лы, 2 ил.
1. Дезинтегратор гипсокартона, содержащий приемную емкость, внутри которой установлены вибросита, каждое из которых снабжено вибродвигателем, в нижней части корпуса приемной емкости выполнено разгрузочное отверстие, на фланце верхней части корпуса приемной емкости закреплена помольная камера с размещенным внутри нее измельчителем, отличающийся тем, что измельчитель выполнен в виде ножевого блока, закрепленного на роторе, нижний торец помольной камеры выполнен в виде перфорированной разгрузочной решетки, а верхний торец представляет собой приемное окно, на фланце которого закреплен загрузочный бункер; ротор ножевого блока установлен в помольной камере в подшипниковых узлах и связан ременной передачей с валом электродвигателя, вращающего упомянутый блок; вибросита кинематически и механически соединены с накопительными емкостями, снабженными тензометрическими датчиками, при этом выходы датчиков подключены к измерительным входам блока управления, силовые выходы которого подключены к вибродвигателям и электродвигателю, вращающему ножевой блок.
2. Дезинтегратор по п.1, отличающийся тем, что ножевой блок состоит из основания, на котором равномерно по окружности механически закреплены три ножа, регулируемых по высоте вдоль оси, перпендикулярной продольной оси ротора.
3. Дезинтегратор по п.1, отличающийся тем, что в приемной емкости установлены, по крайней мере, три вибросита, расположенные друг над другом, при этом размеры ячеек поддонов очистки сит уменьшаются от верхнего сита к нижнему.
4. Дезинтегратор по п.1, отличающийся тем, что вибросита снабжены очистными кольцами, с размещенными в них очистными шарами, при этом упомянутые кольца равномерно закреплены на поддонах очистки вибросит.
5. Дезинтегратор по п.1, отличающийся тем, что блок управления выполнен на основе микроконтроллера, содержащего микропроцессорное ядро, включающее в себя арифметико-логическое устройство, регистры общего назначения, регистр команд, FLASH-память программ и SRAM-память данных, подключенное с помощью системной шины к периферийным устройствам микроконтроллера: к многоканальному аналого-цифровому преобразователю, универсальному синхронно-асинхронному приемопередатчику и универсальным двунаправленным GPIO-портам ввода-вывода.
6. Дезинтегратор по п.5, отличающийся тем, что к линиям аналого-цифрового преобразователя подключены измерительные входы блока управления, к универсальному синхронно-асинхронному приемопередатчику подключен радиомодуль, линии первого GPIO-порта подключены к силовым выходам блока управления, а выходы второго и третьего GPIO-портов подключены, соответственно, к линейке семисегментных индикаторов и управляющим кнопкам.
| ВИБРАЦИОННАЯ МЕЛЬНИЦА | 2017 |
|
RU2637215C1 |
| ДЕЗИНТЕГРАТОР | 2018 |
|
RU2687583C1 |
| КОМПЛЕКС СРЕДСТВ ДЛЯ ПРОИЗВОДСТВА МИНЕРАЛЬНОГО ПОРОШКА | 2000 |
|
RU2194575C2 |
| JP 2011062578 A, 31.03.2011 | |||
| Динамометр для измерения малых крутящих моментов | 1955 |
|
SU104323A1 |
