Од 00 СО 4 4
1 .
Изобретение относится к обучающим устройствам и может найти применение, в частности, при подготовк и проверке квалификации водителя машины, оборудованной вилочным захватом.
Известно устройство, содержащее Олок командоаппаратов, блок моделирования подъема груза и блок моделирования движения груза по осям координат, позволяющее производить обучение управлению такими перегрузочными машинами, как портальный поворотньй кран ЕО ,
Однако данное устройство не позволяет обучать навыкам управления транспортной машиной, что связано с невозможностью имитации перемещения всей машины относительно рабочей зоны с ускорениями, торможениями и поворотами.
Наиболее близким к изобретению является тренажер, содержащий блок управления, блок моделирования динамики Движения, блоки моделирования реальных процессов, блок интегрирования и формирователь СЗ
Недостатком известного тренажера являются ограниченные функциональные возможности, что связано с отсутствием моделирования работы вилочного захвата и отображения положения вил в пространстве.
Цель изобретения - расширение дидактических возможностей тренажер за счет моделирования работы вилочного захвата и отображения положения вил в пространстве.
Указанная цель достигается тем, что в тренажер, содержащий последовательно включенные пульт оператора блок моделирования динамики движения блок предъявления учебной информации, первый выход которого соединен с входом пульта оператора, введены пороговые элементы, три одновибратора, блок суммирования и элемент И-ИЛИ, выход которого соединен с вторым входом блока предъявления учебной информации, а первый, второй и третий входы - соответственно с выходами первого, второго и третьего одновибраторов, входы которых подключены соответственно к выходам первого, второго и третьего пороговых элементов, входа которых соединены с первым и вторым выходами блока суммирования и с вторым выхо3442
дом блока предъявления учебной информации соответственно, первый и второй входы блока суммирования подключены соответственно к вторым и третьим выходам блока моделирования динамики движения.
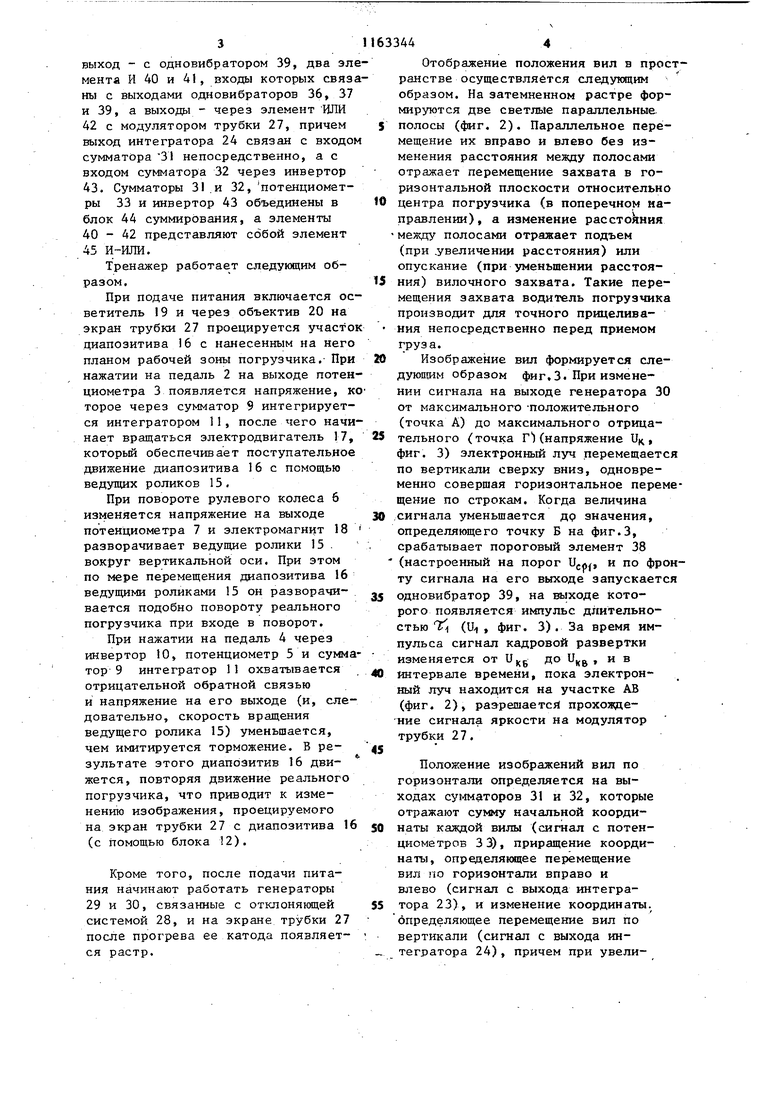
На фиг. 1 приведена функциональная схема тренажера ; на фиг. 2 экран для отображения информации;
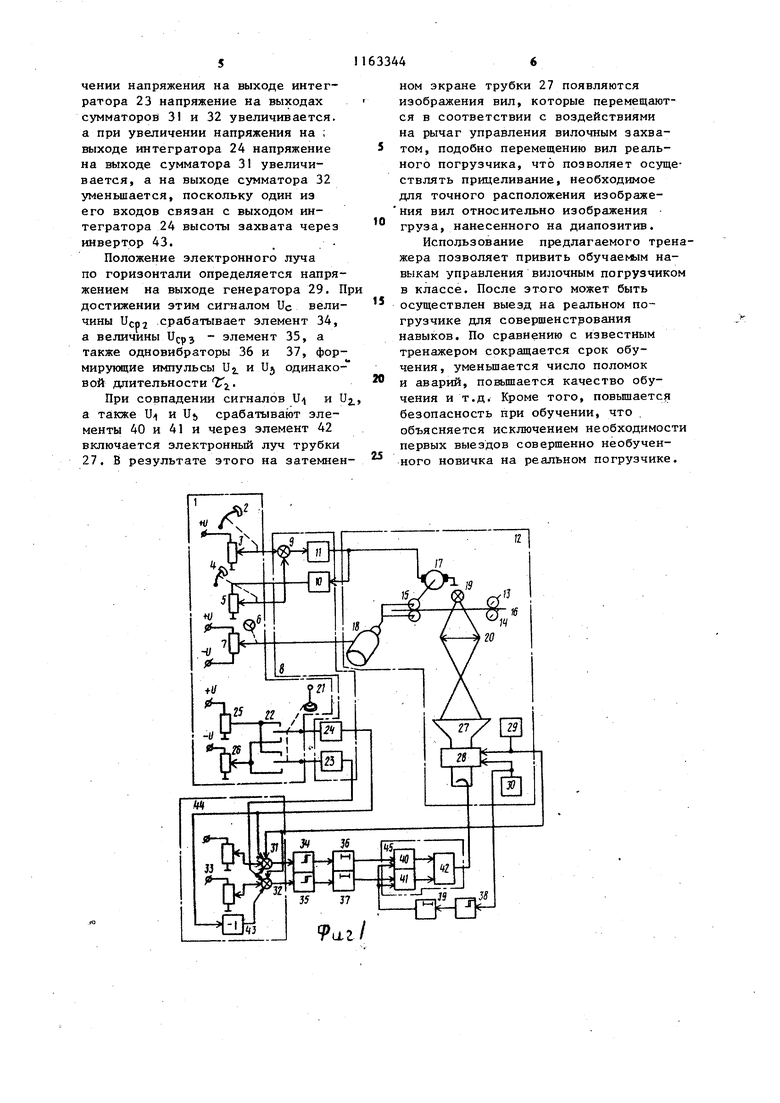
на фиг. 3 - временные диаграммы.
Тренажер содержит пульт I оператора, включающий педаль 2 хода, связанную с потенциометром 3 задания скорости движения, педаль 4
тормоза, связанную с потенциометром 5 задания тормозного момента, и рулевое колесо 6, связанное с потенциометром 7 задания угла поворота колес, блок 8 моделирования динаМИКИ движения, включающий сумматор 9, один вход которого связан с выходом потенциометра 3 задания скорости движения, другой через инвертор 10 и потенциоме р 5 задания тормозного момента - с выходом интегратора 11 скорости, а выход - с входом интегратора 11, блок 12 предъявления учебной информации, включающий две пары прижимных
роликов 13 и 14, пару ведущих
роликов 15, между которыми расположен диапозитив 16, электродвигатель 17, связанный с выходом интегратора 11, электромагнит 18, связанный с потенциометром 7 угла поворота колес, осветитель 19, объектив 20. В пульт 1 входят двухкоординатный рычаг 21 управления вилочным захватом, связанньш с двухкоординатным переключателем 22, а блок 8интегратор 23 бокового перемещения захвата и интегратор 24 высоты захвата, входы которых связаны через переключатель 22 с потенциометрами
25 и 26 задания скорости перемещения, входящими в состав пульта 1.
Блок 12 содержит также электроннолучевую трубку (ЭЛТ) 27, отклоняющую систему 28, связанную с выходами
генераторов 29 строчной и 30 кадровой развертокi сумматоры 31 и 32, входы которыхсвязаны с генератором 29, интегратором 23 и потенциометрами 33 задания начального положения
захвата, а выходы - через пороговые элементы 34 и 35 с одновибраторами 36 и 37, пороговый элемент 38, вход которого связан с генератором 30, а 3 выход - с одноЕибратором 39, два эл мента И 40 и 41, входы которых связ ны с выходами одновибраторов 36, 37 и 39, а выходы - через элемент ИЛИ 42 с модулятором трубки 27, причем выход интегратора 24 связан с входо сумматора 3 непосредственно, а с входом сумматора 32 через инвертор 43. Сумматоры 31.и 32, потенциометры 33 и инвертор 43 объединены в блок 44 суммирования, а элементы 40 - 42 представляют собой элемент 45 И-ИЛИ. Тренажер работает следующим образом. При подаче питания включается ос ветитель 19 и через объектив 20 на экран трубки 27 проецируется участо диапозитива 16 с нанесенным на него планом рабочей зоны погрузчика.- При нажатии на педаль 2 на выходе потен циометра 3 появляется напряжение, к торое через сумматор 9 интегрируется интегратором 11, после чего начи нает вращаться электродвигатель 17, который обеспечивает поступательное движение диапозитива 16 с помощью ведущих роликов 15. При повороте рулевого колеса б изменяется напряжение на выходе потенциометра 7 и электромагнит 18 разворачивает ведущие ролики 15 . вокруг вертикальной оси. При этом по мере перемещения диапозитива 16 ведущими роликами 15 он разворачивается подобно повороту реального погрузчика при входе в поворот. При нажатии на педаль 4 через инвертор 10, потенциометр 5 и сумма тор 9 интегратор 11 охватывается отрицательной обратной связью и напряжение на его выходе (и, следовательно, скорость вращения ведущего ролика 15) уменьшается, чем имитируется торможение. В результате этого диапозитив 16 движется, повторяя движение реального погрузчика, что приводит к изменению изображения, проецируемого на экран трубки 27 с диапозитива 16 (с помощью блока 12). Кроме того, после подачи питания начинают работать генераторы 29 и 30, связанные с отклоняющей системой 28, и на экране трубки 27 после прогрева ее катода появляется растр. 3444 Отображение положения вил в пространстве осуществляется следующим образом. На затемненном растре формируются две светлые параллельные. полосы (4иг. 2). Параллельное перемещение их вправо и влево без изменения расстояния между полосами отражает перемещение захвата в горизонтальной плоскости относительно центра погрузчика (в поперечном направлении) , а изменение расстояния между полосами отражает подъем (при .увеличении расстояния) или опускание (при уменьшении расстояния) вилочного захвата. Такие перемещения захвата водитель погрузчика производит для точного прицеливания непосредственно перед приемом груза. Изображение вил формируется следующим образом фиг.З. При изменении сигнала на выходе генератора 30 от максимального -положительного (точка А) до максимального отрицательного (точка Г ) (напряжение U , фиг. 3) электронный луч перемещается по вертикали сверху вниз, одновременно соверщая горизонтальное перемещение по строкам. Когда величина .сигнала уменьщается др значения, определякнцего точку В на фиг.З, срабатывает пороговый элемент 38 (настроенный на порог , и по фронту сигнала на его выходе запускается одновибратор 39, на вь|ходе которого появляется импульс длительностью (U-) , фиг. 3). За время импульса сигнал кадровой развертки изменяется от U,g до , и в интервале времени, пока электронный луч находится на участке АВ (фиг. 2), разрешается прохоядение сигнала яркости на модулятор трубки 27. Положение изображений вил по горизонтали определяется на выходах сумматоров 31 и 32, которые отражают начальной координаты каждой вилы (сигнал с потенциометров 33), приращение координаты, определяющее перемещение вил по горизонтали вправо и влево (сигнал с выхода интегратора 23), и изменение координаты. определяющее перемещение вил по вертикали (сигнал с выхода интегратора 24), причем при увеличении напряжения на выходе интегратора 23 напряжение на выходах сумматоров 31 и 32 увеличивается, а при увеличении напряжения на ; выходе интегратора 24 напряжение на выходе сумматора 31 увеличивается, а на выходе сумматора 32 уменьшается, поскольку один из его входов связан с выходом интегратора 24 высоты захвата через инвертор 43.
Положение электронного луча по горизонтали определяется напряжением на выходе генератора 29. П достижении этим сигналом Uc величины Ucp2 срабатывает элемент 34, а величины - элемент 35, а также одновибраторы 36 и 37, формирующие импульсы Uj. и Uj одинако- вой длительности TTj.
При совпадении сигналов U/j и Uj а также U( и U., срабатывают элементы 40 и 41 и через элемент 42 включается электронный луч трубки 27. В результате этого на затемненном экране трубки 27 появляются изображения вил, которые перемещаются в соответствии с воздействиями на рычаг управления вилочным захватом, подобно перемещению вил реального погрузчика, что позволяет осуществлять прицеливание, необходимое для точного расположения изображения вил относительно изображения груза, нанесенного на диапозитив.
Использование предлагаемого тренжера позволяет привить обучаеьым навыкам управления вилочным погрузчико в классе. После этого может быть осуществлен выезд на реальном погрузчике для совершенстрования навыков. По сравнению с известным тренажером сокращается срок обучения, уменьшается число поломок и аварий, повьппается качество обучения и т.д. Кроме того, повьппаетсз безопасность при обучении, что объясняется исключением необходимости первых выездов совершенно необученного новичка на реальном погрузчике.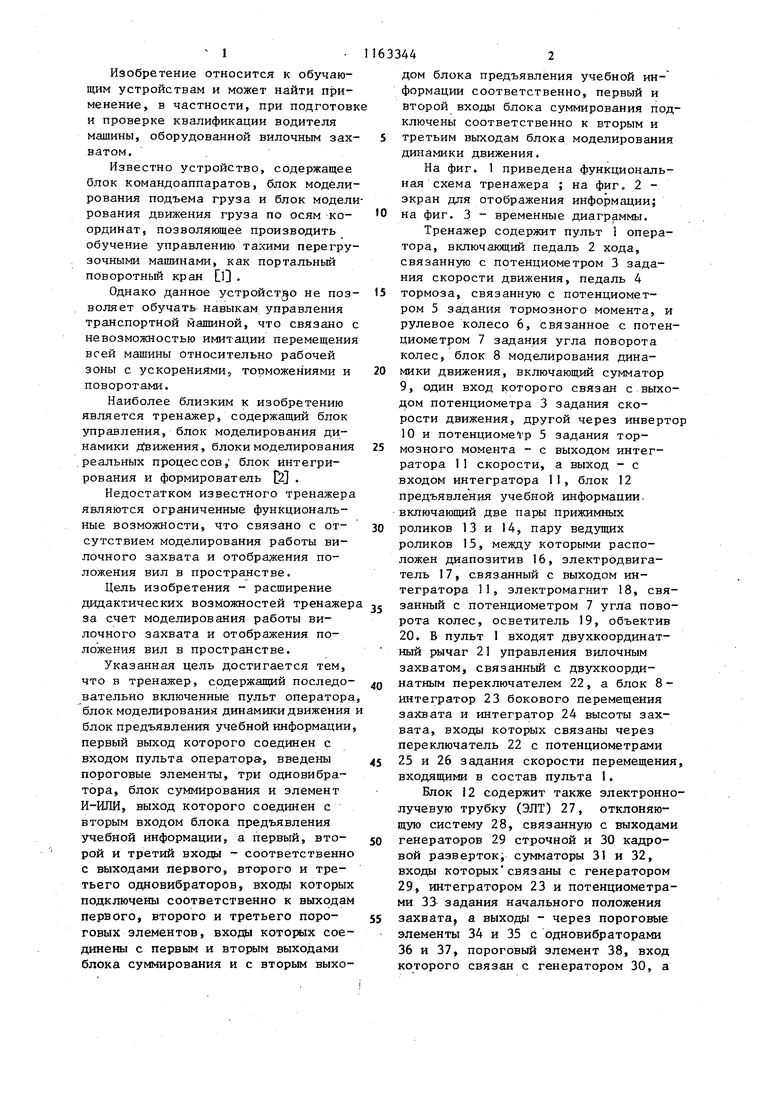
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер водителя транспортного средства | 1986 |
|
SU1328837A1 |
| Тренажер для обучения водителя транспортного средства | 1990 |
|
SU1728876A1 |
| Устройство для обучения операторов грузоподъемных машин | 1982 |
|
SU1035635A1 |
| Тренажер оператора энергетического объекта | 1978 |
|
SU1160462A1 |
| Тренажер операторов автоматизированных систем управления | 1981 |
|
SU991482A1 |
| Тренажер оператора энергоемких процессов | 1981 |
|
SU1043720A1 |
| Тренажер крановщика | 1983 |
|
SU1108484A1 |
| Тренажер буровика | 1982 |
|
SU1062760A1 |
| Устройство для обучения операторов систем управления технологическими процессами | 1985 |
|
SU1249568A1 |
| Устройство для управления кинотренажером | 1984 |
|
SU1275515A1 |
ТРЕНАЖЕР ВОДИТЕЛЯ ПОГРУЗЧИКА, содержащий последовательно включенные пульт оператора,блок моделирования динамикидвижения и блок предъявления учебной информации,первый.выход которого соединен с входом пульта оператора, отличающийся тем5 что, с целью расширения дидак- тических возможностей тренажера, в него введены пороговые элементы, три одновибратора, блою суммирования и элемент И-ИЛИ, выход которого соединен с вторым входом блока предъявления учебной информации, а первый, второй и третий входы - соответственно с выходами п.ервого, второго и третьего одновибраторов, входы которых подключены соответственно к выходам первого, второго и третьего пороговых элементов, входы которых соединены с первым и вторым выходами блока суммирования и с вторым выходом блока предъявления учебной информации соответственно, первый и второй входы блока суммирования (Л подключены соответственно к вторым и третьим выходам блока моделирования динамики движения.
Ц;р|
11
It
%
V-Fg
ы
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР № 805396, кл | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Тренажер водителя транспортно-гО СРЕдСТВА | 1979 |
|
SU798957A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
