Область техники, к которой относится изобретение
Настоящее раскрытие, в целом, относится к области датчиков и, в частности, относится к системам и способам управления оконечным устройством, основываясь на измеряемых сигналах, собираемых датчиком.
Уровень техники
В повседневной жизни появляется все больше умных оконечных устройств и умными оконечными устройствами необходимо эффективно и удобно управлять, чтобы улучшать удобство их использования пользователями. Обычно применяемое взаимодействие «человек-компьютер» реализуется посредством речевых диалогов или ручных операций на структурах объектов, установленных на оконечном устройстве. Однако, в некоторых случаях, такие обстоятельства, как высокий шум, низкая освещенность окружающей среды или неудобство для действий пользователя и т.д., могут создать трудности и проблемы при использовании речевых диалогов или ручных операций на панели управления, чтобы управлять оконечным устройством.
Настоящее раскрытие обеспечивает способ определения действий целевого объекта, который может повысить точность конкретной операции целевого объекта, так чтобы действие целевого объекта удовлетворяло ожиданиям пользователя.
Раскрытие сущности изобретения
Некоторые из вариантов осуществления настоящего раскрытия представляют систему. Система может содержать по меньшей мере одно запоминающее устройство, выполненное с возможностью хранения компьютерных команд, и по меньшей мере один процессор, связанный с запоминающим устройством, причем при исполнении компьютерных команд указанный по меньшей мере один процессор выполнен с возможностью управления системой для выполнения операций, содержащих: получение измеряемого сигнала по меньшей мере от одного датчика; идентификацию признака сигнала для измеряемого сигнала; и определение, на основе признака сигнала, действия целевого объекта, связанного с указанным по меньшей мере одним датчиком.
В некоторых вариантах осуществления указанный по меньшей мере один датчик может содержать датчик вибрации.
В некоторых вариантах осуществления признак сигнала может содержать по меньшей мере количество пиков вибрации, мощность сигнала, временной интервал между двумя соседними пиками вибрации, частотные составляющие или длительность сигнала.
В некоторых вариантах осуществления датчик вибрации может соединяться с областью приема вибрации через твердую среду и принимать сигнал вибрации, вводимый в область приема вибрации.
В некоторых вариантах осуществления сигнал вибрации может вводиться в область приема вибрации посредством постукивания, похлопывания или скобления в области приема вибрации.
В некоторых вариантах осуществления датчик вибрации может жестко соединяться с твердой средой посредством по меньшей мере склеивания, штамповки, сварки, клепки или винтового соединения.
В некоторых вариантах осуществления датчик вибрации может располагаться в месте, где амплитуда твердой среды велика.
В некоторых вариантах осуществления определение, на основе признака сигнала, действия целевого объекта, связанного с указанным по меньшей мере одним датчиком, может содержать: определение, соответствует ли признак сигнала заданному признаку; и в ответ на определение, что признак сигнала соответствует заданному признаку, определение действия целевого объекта, соответствующего заданному признаку.
В некоторых вариантах осуществления определение, соответствует ли признак сигнала заданному признаку, может содержать определение, на основе модели идентификации состояния заданного признака, соответствует ли признак сигнала заданному признаку. Модель идентификации состояния заданного признака может быть моделью машинного обучения.
В некоторых вариантах осуществления действие целевого объекта может содержать переключение оконечного устройства из первого состояния во второе состояние.
В некоторых вариантах осуществления получение измеряемого сигнала по меньшей мере от одного датчика может содержать: получение первого измеряемого сигнала указанного по меньшей мере от одного датчика; определение, превышает ли первый измеряемый сигнал сигнальный порог; и в ответ на определение, что первый измеряемый сигнал превышает сигнальный порог, назначение в качестве измеряемого сигнала сигнал, в котором интервал между указанным сигналом и первым измеряемым сигналом находится в пределах диапазона порогового времени.
В некоторых вариантах осуществления датчик вибрации может быть расположен на носимом устройстве. Носимое устройство может быть прикреплено к части тела пользователя, и датчик вибрации через носимое устройство может принимать сигнал вибрации, формируемый движениями тела пользователя.
В некоторых вариантах осуществления датчик вибрации может прикрепляться к части тела пользователя и датчик вибрации может принимать сигнал вибрации, формируемый движениями тела пользователя.
В некоторых вариантах осуществления движения тела могут содержать кашель, чихание, храп, зевоту или падение.
В некоторых вариантах осуществления определение, на основе признака сигнала, действия целевого объекта, связанного с указанным по меньшей мере одним датчиком, может содержать: определение, на основе признака сигнала, физиологического состоянии пользователя; и определение, на основе физиологического состояния пользователя, действия целевого объекта, соответствующего физиологическому состоянию.
В некоторых вариантах осуществления, определение, на основе признака сигнала, физиологического состояния пользователя может содержать определение, соответствует ли признак сигнала заданному признаку, и в ответ на определение, что признак сигнала соответствует заданному признаку, определение физиологического состояния, соответствующего заданному признаку.
В некоторых вариантах осуществления действие целевого объекта может содержать регистрацию мобильным терминалом состояния здоровья или выдачу предупреждения.
В некоторых вариантах осуществления частота отклика датчика вибрации может быть в диапазоне 2 кГц -4,5 кГц.
В некоторых вариантах осуществления чувствительность датчика вибрации может быть в диапазоне от -35 дБВ/(м/с2) до -15 дБВ/(м/с2).
В некоторых вариантах осуществления указанный по меньшей мере один датчик может дополнительно содержать датчик движения.
В некоторых вариантах осуществления определение, на основе признака сигнала, действия целевого объекта, связанного с указанным по меньшей мере одним датчиком, может содержать: определение, на основе признака сигнала, упал ли пользователь, и положения тела пользователя; и определение, на основе определения, упал ли пользователь, и положения тела пользователя, действия целевого объекта.
В некоторых вариантах осуществления определение действия целевого объекта на основе определения, упал ли пользователь, и положения тела пользователя, может содержать: в ответ на определение, что пользователь упал и положение тела не меняется, определение, что пользователь находится в опасном состоянии, и мобильный терминал выполняет действие по вызову помощи.
В некоторых вариантах осуществления указанный по меньшей мере один датчик может дополнительно содержать датчик физиологических параметров.
В некоторых вариантах осуществления определение, на основе признака сигнала, действия целевого объекта, связанного по меньшей мере с одним датчиком может содержать: определение, на основе признака сигнала, упал ли пользователь, положения тела пользователя и по меньшей мере одного физиологического параметра; и определение, на основе определения, упал ли пользователь, положения тела пользователя и указанного по меньшей мере одного физиологического параметра, действия целевого объекта.
В некоторых вариантах осуществления определение действия целевого объекта на основе определения, упал ли пользователь, положения тела пользователя и физиологического параметра, может содержать: в ответ на определение, что пользователь упал и положение тела неподвижно или физиологический параметр превышает заданный порог, определение, что пользователь находится в опасном состоянии, и мобильный терминал выполняет действие по вызову помощи.
В некоторых вариантах осуществления физиологический параметр может содержать по меньшей мере частоту пульса, давление крови или содержание глюкозы в крови.
В некоторых вариантах осуществления движение тела может содержать стучание зубами.
В некоторых вариантах осуществления указанный по меньшей мере один датчик может содержать датчик вибрации, расположенный в определенном месте.
В некоторых вариантах осуществления идентификация признака сигнала для измеряемых сигналов может содержать идентификацию количества пиков вибрации, временной интервал между двумя соседними пиками вибрации и длительность сигнала для измеряемого сигнала.
В некоторых вариантах осуществления указанный по меньшей мере один датчик может содержать датчики вибрации, соответственно расположенные в разных местах.
В некоторых вариантах осуществления признак сигнала может дополнительно содержать разность фаз измеряемых сигналов датчиков вибрации, расположенных в разных местах, и разность фаз измеряемых сигналов может быть выполнена с возможностью определения местоположения источника сигнала вибрации.
В некоторых вариантах осуществления идентификация признаков сигнала для измеряемого сигнала может содержать идентификацию количества пиков вибрации, временной интервал между двумя соседними пиками вибрации, длительность сигнала и сдвиг фаз сигналов вибрации.
В некоторых вариантах осуществления действие целевого объекта может содержать переключение оконечного устройства из первого состояния во второе состояние.
В некоторых вариантах осуществления получение измеряемого сигнала по меньшей мере от одного датчика может содержать: получение второго измеряемого сигнала указанного по меньшей мере от одного датчика; определение, является ли частота второго измеряемого сигнала меньше заданного частотного порога; и в ответ на определение, что частота второго измеряемого сигнала меньше заданного частотного порога, назначение второго измеряемого сигнала в качестве ложного сигнала срабатывания.
В некоторых вариантах осуществления указанный по меньшей мере один датчик может содержать устройство аудиоввода, и получение измеряемого сигнала по меньшей мере от одного датчика может содержать: получение третьего измеряемого сигнала от указанного по меньшей мере одного датчика; определение, принимает ли устройство аудиоввода одновременно аудиоинформацию пользователя; и в ответ на определение, что устройство аудиоввода принимает аудиоинформацию пользователя, назначение третьего измеряемого сигнала в качестве ложного сигнала срабатывания.
В некоторых вариантах осуществления получение измеряемого сигнала по меньшей мере от одного датчика может содержать: получение четвертого измеряемого сигнала от указанного по меньшей мере одного датчика; определение, на основе модели идентификации ложного срабатывания, является ли четвертый измеряемый сигнал ложным сигналом срабатывания; и в ответ на определение, что четвертый измеряемый сигнал не является ложным сигналом срабатывания, назначение в качестве измеряемого сигнала, у которого интервалом между указанным сигналом и четвертым измеряемым сигналом находится в пределах диапазона другого порога.
В некоторых вариантах осуществления модель идентификации ложного срабатывания может быть моделью машинного обучения.
Некоторые из вариантов осуществления существующего раскрытия дополнительно обеспечивают способ. Способ может содержать этапы, на которых: получают измеряемый сигнал по меньшей мере от одного датчика; идентифицируют признак сигнала для измеряемого сигнала; и определяют, на основе признака сигнала, действие целевого объекта, связанного с указанным по меньшей мере одним датчиком.
Некоторые из вариантов осуществления настоящего раскрытия дополнительно обеспечивают считываемый компьютером носитель долговременного пользования, содержащий по меньшей мере один набор компьютерных команд. При исполнении по меньшей мере одним процессором указанный по меньшей мере один набор компьютерных команд может скомандовать указанному по меньшей мере одному процессору выполнить операции, содержащие: получение измеряемого сигнала по меньшей мере от одного датчика; идентификацию признака сигнала для измеряемого сигнала; и определение, на основе признака сигнала, действия целевого объекта, связанного с указанным по меньшей мере одним датчиком.
Краткое описание чертежей
Настоящее раскрытие дополнительно поясняется на основе примерных вариантов осуществления и эти примерные варианты осуществления описываются подробно со ссылкой на чертежи. Эти варианты осуществления не являются ограничивающими. В этих вариантах осуществления один и тот же позиционный номер указывает одну и ту же структуру, причем:
фиг. 1- примерный сценарий применения системы управления целевым объектом в соответствии с некоторыми вариантами осуществления в настоящем раскрытии;
фиг. 2 - блок-схема последовательности выполнения операций примерного процесса управления целевым объектом в соответствии с некоторыми вариантами осуществления настоящего раскрытия;
фиг. 3 - блок-схема примерной системы управления целевым объектом в соответствии с некоторыми вариантами осуществления настоящего раскрытия;
фиг. 4 - блок-схема последовательности выполнения операций примерного процесса управления целевым объектом в соответствии с некоторыми вариантами осуществления настоящего раскрытия;
фиг. 5A-5D - спектры сигналов для признаков сигналов вибрации, формируемых различными операциями пользователя в соответствии с некоторыми вариантами осуществления настоящего раскрытия;
фиг. 6 - внутреннее помещение с оконечным устройством, соответствующее некоторым вариантам осуществления настоящего раскрытия;
фиг. 7 - блок-схема последовательности выполнения операций процесса управления освещением во внутреннем помещении в соответствии с некоторыми вариантами осуществления настоящего раскрытия;
фиг. 8 - интерьер транспортного средства, снабженного оконечным устройством в соответствии с некоторыми вариантами осуществления настоящего раскрытия;
фиг. 9 - блок-схема последовательности выполнения операций примерного процесса управления оконечным устройством внутри транспортного средства в соответствии с некоторыми вариантами осуществления настоящего раскрытия;
фиг. 10 - компьютерное рабочее место, снабженное оконечным устройством, соответствующее некоторым вариантам осуществления настоящего раскрытия;
фиг. 11 - блок-схема последовательности выполнения операций примерного процесса управления целевым объектом в соответствии с некоторыми вариантами осуществления настоящего раскрытия;
фиг. 12A-12E - спектры сигналов для признаков сигналов вибрации, соответствующих различным движениям тела в соответствии с некоторыми вариантами осуществления настоящего раскрытия;
фиг. 13 - частотная характеристика сигнала вибрации при движении тела пользователя в соответствии с некоторыми вариантами осуществления настоящего раскрытия;
фиг. 14 - управление системой целевым объектом для переносного устройства в соответствии с некоторыми вариантами осуществления настоящего раскрытия;
фиг. 15 - блок-схема последовательности выполнения операций примерного процесса определения действия целевого объекта, основываясь на сигнале вибрации, сформированном движением тела пользователя, в соответствии с некоторыми вариантами осуществления настоящего раскрытия;
фиг. 16 - управление системой целевым объектом для переносного устройства в соответствии с некоторыми вариантами осуществления настоящего раскрытия;
фиг. 17 блок-схема последовательности выполнения операций примерного процесса определения действия целевого объекта, основываясь на сигнале вибрации, сформированном движением тела пользователя;
фиг. 18 - блок-схема последовательности выполнения операций примерного процесса определения операции целевого объекта, основываясь на сигнале вибрации, сформированном движением тела пользователя;
фиг. 19 - управление системой целевым объектом для переносного устройства в соответствии с некоторыми вариантами осуществления настоящего раскрытия;
фиг. 20 - блок-схема последовательности выполнения операций примерного процесса управления целевым объектом в соответствии с некоторыми вариантами осуществления настоящего раскрытия;
фиг. 21 - передача сигнала вибрации в соответствии с некоторыми вариантами осуществления настоящего раскрытия;
фиг. 22 - система управления целевым объектом, применяемая для переносного устройства в соответствии с некоторыми вариантами осуществления настоящего раскрытия;
фиг. 23 - спектр признака сигнала для измеряемого сигнала, соответствующего стучанию пользователем зубами, соответствующий некоторым вариантам осуществления настоящего раскрытия; и
фиг. 24 - применение системы управления целевым объектом к переносному устройству в соответствии с некоторыми вариантами осуществления настоящего раскрытия.
Осуществление изобретения
Чтобы проиллюстрировать технические решения, связанные с вариантами осуществления настоящего раскрытия, ниже приводится краткое введение к чертежам, упомянутым в описании вариантов осуществления. Очевидно, чертежи, описанные ниже, являются только некоторыми примерами или вариантами осуществления настоящего раскрытия. Специалисты в данной области техники без дополнительных творческих усилий могут применять настоящее раскрытие к другим подобным сценариям в соответствии с этими чертежами. Если не заявлено иное или иное не является очевидным из контекста, одна и та же ссылочная позиция на чертежах относится к одной и той же структуре и операции.
Как используется в раскрытии и в приложенной формуле изобретения, единственное число содержит в себя и множественное число, если контент явно не указывает иное. В целом, термины «содержать», «содержит» и/или «содержащий», «включать», «содержит» и/или «включающий» просто подсказывают необходимость содержания этапов и элементов, которые были ясно идентифицированы, и эти этапы и элементы не составляют эксклюзивный список. Способы или устройства могут также содержать другие этапы или элементы. Термин «основанный на» соответствует «основанный, по меньшей мере частично, на». Термин «один вариант осуществления» соответствует «по меньшей мере один вариант осуществления». Термин «другой вариант осуществления» соответствует «по меньшей мере один другой вариант осуществления». Сопутствующие определения других терминов будут даны в описании ниже.
Некоторые варианты осуществления настоящего раскрытия обеспечивают способ определения действия целевого объекта. Способ может содержать получение измеряемого сигнала по меньшей мере от одного датчика. Измеряемый сигнал может формироваться датчиком после получения внешнего сигнала. В некоторых вариантах осуществления внешний сигнал может содержать сигнал вибрации, другие типы сигналов или любое их сочетание. Другие типы сигналов могут содержать акустический сигнал, оптический сигнал, электрический сигнал и т.п. Так как сигнал вибрации передается через твердую среду даже в среде со звуковой интерференцией или даже высоким уровнем шума, сигнал вибрации может, несмотря ни на что, быть точно и эффективно получен датчиком. Идентифицируя признак сигнала для измеряемого сигнала, действие целевого объекта, связанного по меньшей мере с одним датчиком, может быть определено, основываясь на признаке сигнала, и поэтому действие целевого объекта может быть более точным и удобным. Целевой объект может относиться к оконечному устройству, которое соединяется/связывается с датчиком для выполнения различных функций.
На фиг. 1 схематично представлен примерный сценарий применения системы управления целевым объектом в соответствии с некоторыми вариантами осуществления в настоящем раскрытии. Для удобства представления система 100 управления целевым объектом кратко может упоминаться как система 100. Система 100 может содержать датчик 110, устройство 120 обработки, оконечное устройство 130 (или упоминаемое как целевой объект) и запоминающее устройство 140. В некоторых вариантах осуществления система 100 может идентифицировать признак сигнала для измеряемого сигнала, собранного датчиком 110, и определять действие, которое должно быть выполнено оконечным устройством, основываясь на признаке сигнала. Каждый компонент в системе 100 может быть соединен друг с другом проводным или беспроводным способом.
В некоторых вариантах осуществления проводное соединение может содержать, но не ограничиваясь только этим, использование металлического кабеля, оптического кабеля или любого их сочетания, такого как коаксиальный кабель, связной кабель, гибкий кабель, спиральный кабель, кабель с неметаллической оплеткой, кабель с металлической оплеткой, многожильный кабель, кабельная витая пара, ленточный кабель, экранированный кабель, телекоммуникационный кабель, дуплексный кабель, двужильный кабель и витая пара. Примеры, описанные выше, служат просто для удобства иллюстрации. Носитель проводного соединения может также других типов, таких как переносчик передачи других электрических сигналов или оптических сигналов.
Беспроводное соединение может содержать, но не ограничиваясь только этим, радиосвязь, оптическую связь в свободном пространстве, акустическую передачу, электромагнитную индукционную связь и т.п. Радиосвязь может осуществляться, но не ограничиваясь только этим, используя серию стандартов IEEE302.11, серию стандартов IEEE302.15 (например, технологию Bluetooth и технологию Zigbee, и т.д.), технологию мобильной связи первого поколения, технологию мобильной связи второго поколения (например, мультидоступ с частотным разделением каналов (frequency division multiple access, FDMA), мультидоступ с временным разделением каналов (time division multiple access, TDMA), мультидоступ с пространственным разделением каналов (space division multiple access, SDMA), мультидоступ с кодовым разделением каналов (code division multiple access, CDMA), мультидоступ с распределенным спектром (spread spectrum multiple access, SSMA), и т.д.), технологию пакетной радиосвязи общего применения, технологию мобильной связи третьего поколения (например, CDMA2000, широкополосный мультидоступ с кодовым разделением каналов (wideband code division multiple access, WCDMA), синхронизированный мультидоступ с временным и кодовым разделением каналов (time division-synchronous code division multiple access, TD-SCDMA), технологию универсальной микроволновой беспроводной связи на большие расстояния (world interoperability for microwave access, WIMAX), и т.д.), технологию мобильной связи четвертого поколения (например, технология долгосрочного развития TD-SCDMA (TD-SCDMA long term evolution, TD-LTE), технология долгосрочного развития дуплексной связи с частотным разделением каналов (frequency-division duplex long term evolution, FDD-LTE), и т.д.), спутниковую связь (например, система глобального позиционирования (global positioning system, GPS) и т.д.), технологию связи в ближнем поле (near-field communication, NFC) и другие технологии, работающие в промышленной, научной, медицинской (industrial scientific medical, ISM) полосе (например, 2,4 ГГц и т.д.). Оптическая связь в свободном пространстве может содержать, но не ограничиваясь только этим, видимый свет, инфракрасный сигнал и т.д. Акустическая связь может содержать, но не ограничиваясь только этим, звуковую волну, ультразвуковой сигнал и т.д. Электромагнитная индукционная связь может содержать, но не ограничиваясь только этим, технологию связи в ближнем поле. Примеры, описанные выше, предназначены просто для удобства иллюстрации. Носитель беспроводного соединения может также быть другими типами, такими как технология Z-волны, другие подлежащие оплате гражданские радиодиапазоны, военные радиодиапазоны, и т.п.
Датчик 110 может собирать внешний сигнал и формировать измеряемый сигнал, основываясь на внешнем сигнале (например, электрическом сигнале). Внешний сигнал может содержать механический сигнал вибрации (который может также упоминаться как сигнал вибрации), акустический сигнал, оптический сигнал, электрический сигнал и т.п. В некоторых вариантах осуществления внешний сигнал может быть получен от пользователя или введен пользователем определенным способом и может также упоминаться как сигнал пользователя. Датчик 110 может содержать, но не ограничиваясь только этим, датчик давления, датчик вибрации, сенсорный датчик, устройство ввода аудио, оптический датчик и т.п. или любое их сочетание. В некоторых вариантах осуществления датчик 110 может содержать, по меньшей мере, датчик вибрации, чтобы собирать сигнал вибрации. В некоторых вариантах осуществления пользователь может вводить сигнал в датчик 110, чтобы заставить датчик формировать соответствующий измеряемый сигнал. Например, измеряемый сигнал 110 может собирать сигнал вибрации, вводимый пользователем (например, ударом по дверной панели, стучанием зубами и т.д.). Так как на сигнал вибрации мало влияет шум окружающей среды во время передачи, сигнал вибрации может быть собран датчиком 110 точно и эффективно.
Устройство 120 обработки может обрабатывать данные и/или информацию, полученную от других компонентов, от датчика 110, запоминающего устройства 140 или системы 100. Например, устройство 120 обработки может обрабатывать измеряемый сигнал, полученный от датчика 110, и определять признак сигнала для измеряемого сигнала. В некоторых вариантах осуществления устройство 120 обработки может быть независимым сервером или группой серверов. Группа серверов может быть централизованной или распределенной. В некоторых вариантах осуществления устройство 120 обработки может быть локальным или удаленным. Например, устройство 120 обработки может получать доступ к информации и/или данным от датчика 110, оконечного устройства 130 и/или от запоминающего устройства 140. Как другой пример, устройство 120 обработки может напрямую соединяться с датчиком 110, оконечным устройством 130 и/или с запоминающим устройством 140, чтобы получить доступ к информации и/или данным. В некоторых вариантах осуществления устройство 120 обработки может содержать один или более субпроцессоров (например, одноядерный процессор(-ы) или многоядерный процессор(-ы)). Просто для примера, процессор может содержать центральный процессор (central processing unit, CPU), специализированную прикладную интегральную схему (application-specific integrated circuit, ASIC), специализированный прикладной процессор системы команд (application-specific instruction-set processor, ASIP), графический процессор (central processing unit, GPU), физический процессор (physics processing unit, PPU), цифровой сигнальный процессор (digital signal processor, DSP), программируемую логическую интегральную схему (field-programmable gate array, FPGA), программируемое логическое устройство (programmable logic device, PLD), контроллер, блок микроконтроллера, компьютер с сокращенной системой команд (reduced instruction-set computer, RISC), микропроцессор и т.п. или любое их сочетание. В некоторых вариантах осуществления устройство 120 обработки может быть чипом (микросхемой). Чип может быть расположен в датчике 110. В некоторых конкретных вариантах осуществления устройство 120 обработки может быть процессором датчика 110 (например, чипом датчика 110), который может не только принимать и собирать сигнал вибрации, но также и обрабатывать измеряемый сигнал, формируемый датчиком 110.
Запоминающее устройство 140 может хранить данные, команды и/или любую другую информацию, такую как измеряемый сигнал, информация о признаке сигнала для измеряемого сигнала. В некоторых вариантах осуществления запоминающее устройство 140 может хранить данные, полученные из датчика 110 и/или от устройства 120 обработки. В некоторых вариантах осуществления запоминающее устройство 140 может хранить данные и/или команды, которые устройство 120 обработки может выполнять или использовать для выполнения примерных способов, описанных в настоящем раскрытии. В некоторых вариантах осуществления запоминающее устройство 140 может содержать запоминающее устройство большого объема, съемное запоминающее устройство, энергозависимую память с чтением-записью, постоянное запоминающее устройство (read-only memory, ROM) и т.п. или любое их сочетание. В некоторых вариантах осуществления запоминающее устройство 140 может быть реализовано на облачной платформе.
В некоторых вариантах осуществления запоминающее устройство 140 может осуществлять связь по меньшей мере с одним другим компонентом в системе 100 (например, с устройством 120 обработки). По меньшей мере один компонент в системе 100 может получать доступ к данным, хранящимся в запоминающем устройстве 140 (например, признак сигнала). В некоторых вариантах осуществления запоминающее устройство 140 может быть частью устройства 120 обработки.
В некоторых вариантах осуществления оконечное устройство 130 может содержать мобильное устройство, планшетный компьютер, ноутбук, устройство, встроенное в транспортное средство, домашнее смарт-устройство и т.п. или любое их сочетание. В некоторых вариантах осуществления мобильное устройство может содержать носимое устройство, мобильное смарт-устройство, устройство виртуальной реальности, устройство аугментированной реальности, смарт-игрушку, смарт-динамик и т.п. или любое их сочетание. В некоторых вариантах осуществления носимое устройство может содержать смарт-браслет, смарт-обувь, смарт-очки, смарт-шлем, смарт-часы, смарт-одежду, смарт-рюкзак, смарт-аксессуар и т.п. или любое их сочетание. В некоторых вариантах осуществления мобильное смарт-устройство может содержать смарт-телефон, персональный цифровой секретарь (personal digital assistant, PDA), игровое устройство, навигационное устройство, торговую точку (point of sale, POS) и т.п. или любое их сочетание. В некоторых вариантах осуществления устройство виртуальной реальности и/или устройство аугментированной реальности могут содержать шлем виртуальной реальности, очки виртуальной реальности, патч виртуальной реальности, шлем аугментированной реальности, очки аугментированной реальности, патч аугментированной реальности и т.п. или любое их сочетание. В некоторых вариантах осуществления встроенное устройство может содержать телефоны, встроенные в транспортное средство, мультимедийные устройства, встроенные в транспортное средство, Bluetooth, устройства навигации и т.д. В некоторых вариантах осуществления домашнее смарт-устройство может содержать смарт-устройство освещения (например, лампы), управляющее устройство интеллектуальной электрической аппаратуры, устройство смарт-контроля, смарт-телевизор, смарт-видеокамеру, внутридомовый телефон и т.п. или любое их сочетание.
На фиг. 2 представлена блок-схема последовательности выполнения операций примерного процесса управления целевым объектом в соответствии с некоторыми вариантами осуществления настоящего раскрытия. Конкретно, способ 200 управления целевым объектом может исполняться системой 100 управления целевым объектом (например, устройством 120 обработки). Например, способ 200 управления целевым объектом может храниться в запоминающем устройстве (таком как автономное запоминающее устройство устройства 120 обработки или запоминающее устройство 140) в форме программы или команд. Способ 200 управления целевым объектом может быть реализован, когда система 100 управления целевым объектом (например, устройство 120 обработки) выполняет программу или команды. Действие процесса ниже представляется просто для иллюстрации. В некоторых вариантах осуществления процесс 200 может быть выполнен с одной или более дополнительными не описанными здесь операциями и/или без одной или более обсуждавшихся операций. Кроме того, порядок операций процесса 200, показанного на фиг. 2 и описанного ниже, не является ограничивающим.
На этапе 210 устройство 120 обработки может получить измеряемый сигнал по меньшей мере от одного датчика 110. В некоторых вариантах осуществления операция 210 может выполняться модулем 310 получения измеряемого сигнала.
Измеряемый сигнал может относиться к сигналу, сформированному, основываясь на внешнем сигнале, после того, как датчик 110 принимает внешний сигнал. Например, измеряемый сигнал может быть электрическим сигналом, формируемым датчиком 110 измеряемого сигнала, основываясь на принятом сигнале вибрации. В некоторых вариантах осуществления внешний сигнал может содержать механический сигнал вибрации (который может также упоминаться как сигнал вибрации), другие типы сигналов или любое их сочетание. Другие типы сигналов могут содержать оптический сигнал, акустический сигнал, электрический сигнал и т.п. Датчик 110 может содержать, но не ограничиваясь только этим, датчик вибрации, датчик давления, тактильный датчик, устройство ввода аудио, оптический датчик и т.п., или любое их сочетание. Например, датчик 110 может содержать, по меньшей мере, датчик вибрации, чтобы собирать сигнал вибрации. В некоторых вариантах осуществления сигнал вибрации может быть сформирован движением тела пользователя, стучанием зубов пользователя или выполнением конкретного действия (например, удар, постукивание, скобление и т.д.) в определенной области (например, область приема вибрации). Датчик 110 может принимать сигнал вибрации и формировать соответствующий измеряемый сигнал, основываясь на сигнале вибрации.
На этапе 220 устройство 120 обработки может идентифицировать признак сигнала для измеряемого сигнала. В некоторых вариантах осуществления этап 220 может выполняться модулем 320 идентификации признака сигнала.
Признак сигнала может относиться к соответствующей информации, которая отражает характеристики сигнала. В некоторых вариантах осуществления устройство 120 обработки может идентифицировать признак сигнала для измеряемого сигнала, выполняя обработку измеряемого сигнала во временной области и/или в частотной области. Для сигнала вибрации признак сигнала для измеряемого сигнала, соответствующего сигналу вибрации, может содержать, но не ограничиваясь только этим, количество пиков вибрации, мощность сигнала, временной интервал между двумя соседними пиками вибрации, частотные составляющие, длительность сигнала и т.п. или любое их сочетание.
Количество пиков вибрации может относиться к количеству пиков вибрации, амплитуда которых больше заданной амплитуды. Количество пиков вибрации может отражать признак количества внешних сигналов (например, количество случаев постукивания пользователя, количество случаев стучания зубами, количество случаев определенных движений тела и т.д.). Мощность сигнала может относиться к мощности сигнала. Мощность сигнала может отражать признак мощности внешнего сигнала (например, мощность ударов и постукиваний пользователя). Чем сильнее пользователь стучит и постукивает, тем большая мощность сигнала для сигнала вибрации формируется. Временной интервал между двумя соседними пиками вибрации может относиться к временному интервалу между двумя соседними пиками вибрации для пика вибрации. В некоторых вариантах осуществления временной интервал двумя соседними пиками вибрации может отражать признак плотности внешних сигналов (например, временной интервал для стука, постукиваний и стучания пользователя зубами, временной интервал между двумя соседними движениями тела и т.д.). Частотные составляющие сигнала могут относиться к информации о доле мощности на каждой частоте в измеряемом сигнале. Информация о доле мощности на каждой частоте может содержать, например, долю мощности высокочастотных сигналов, долю средне-высокочастотных сигналов, сигналов средней частоты, средне-низкочастотных сигналов, низкочастотных сигналов и т.д. Высокая частота, средне-высокая частота, средняя частота, средне-низкая частота и/или низкая частота в существующем раскрытии могут определяться условно. Например, высокочастотный сигнал может быть сигналом с частотой, большей 4000 Гц. Средне-высокочастотный сигнал может быть сигналом с частотой в пределах диапазона 2500 Гц - 5000 Гц. Среднечастотный сигнал может быть сигналом с частотой в пределах диапазона 1000 Гц - 4000 Гц. Средне-высокочастотный сигнал может быть сигналом с частотой в пределах диапазона 600 Гц - 2000 Гц. Низкочастотный сигнал может быть сигналом с частотой в пределах диапазона 20 Гц-1000 Гц. Длительность сигнала может относиться к длительности всего измеряемого сигнала или длительности одиночного пика вибрации в измеряемом сигнале. Например, весь измеряемый сигнал может содержать три пика вибрации и длительность всего измеряемого сигнала может составить 3 секунды.
В некоторых вариантах осуществления устройство 120 обработки может определить спектр сигнала признака для измеряемого сигнала, выполняя обработку во временном интервале и/или в частотном интервале для измеряемого сигнала, таким образом определяя признак сигнала для измеряемого сигнала. Дополнительные описания признака сигнала для идентификации измеряемого сигнала можно найти в вариантах осуществления, представленных на фиг. 4, которые здесь не описываются.
На этапе 230 устройство 120 обработки, основываясь на признаке сигнала, может определить действие целевого объекта, связанного по меньшей мере с одним датчиком 110. В некоторых вариантах осуществления этап 220 может выполняться модулем 330 определения действия.
Целевой объект может означать оконечное устройство 130, выполненное с возможностью осуществления конкретной функции. Например, мобильное устройство (такое как смартфон, смарт-часы и т.д.) для выполнения вызовов. Как другой пример, аудиоустройство, выполненное с возможностью воспроизведения музыки, (такое как головной телефон, встроенный в транспортное средство динамик, динамик Bluetooth и т.д.). В качестве еще одного примера, устройство освещения, выполненное с возможностью включения (такое как лампа внутри помещения, автомобильный свет и т.д.). Следует заметить, что оконечное устройство 130 упоминается выше просто для примера. Оконечное устройство 130 может быть любым устройством, выполняющим функции, требуемые пользователем. Связь целевого объекта по меньшей мере с одним датчиком 110 может пониматься как оконечное устройство 130, выполненное с возможностью осуществления конкретной функции в ответ на конкретный признак сигнала для измеряемого сигнала датчика 110. В некоторых вариантах осуществления целевой объект может осуществлять связь с устройством 120 обработки. В некоторых вариантах осуществления способ соединения для осуществления связи может содержать проводное соединение или беспроводное соединение. Например, кабельное проводное соединение. Другим примером служит беспроводное соединение через устройство Bluetooth. Действие целевого объекта может относиться к функции оконечного устройства 130, например, воспроизведению/паузе при воспроизведении музыки, вызов/отбой вызова, включение/выключение освещения и т.п. Дополнительные описания операции по определению целевого объекта, основываясь на признаке сигнала, может найти в вариантах осуществления, представленных на фиг. 4-10, которые здесь не описываются.
В некоторых вариантах осуществления устройство 120 обработки, основываясь на признаке сигнала, может определить физиологическое состояние пользователя. Дополнительно, устройство 120 обработки, основываясь на физиологическом состоянии пользователя, может определить действие целевого объекта, соответствующее физиологическому состоянию. В некоторых вариантах осуществления устройство 120 обработки, основанный на признаке сигнала, может определить, упал ли пользователь, и положение тела пользователя, и, основываясь на определении, упал ли пользователь, и положении тела пользователя, может определить действие целевого объекта. В некоторых вариантах осуществления устройство 120 обработки, основываясь на признаке сигнала, может определить, упал ли пользователь, положение тела пользователя и по меньшей мере один физиологический параметр, и, основываясь на определении, упал ли пользователь, положении тела пользователя и по меньшей мере одного физиологического параметра, определить действие целевого объекта. Дополнительные описания по определению физиологического состояния пользователя, основываясь на признаке сигнала, можно найти в вариантах осуществления, представленных на фиг. 11-18, которые здесь не описываются.
В некоторых вариантах осуществления, когда устройство 120 обработки получает измеряемый сигнал, может быть выполнен процесс обработка противодействия ложному инициированию. Например, устройство 120 обработки может получать измеряемый сигнал по меньшей мере от одного датчика 110 в реальном времени или периодически. Когда устройство 120 обработки получает измеряемый сигнал (также называемый первым измеряемым сигналом), устройство 120 обработки может определить, превышает ли сигнальный порог мощность первого измеряемого сигнала. Когда мощность первого измеряемого сигнала меньше сигнального порога, устройство 120 обработки может определить первый измеряемый сигнал как сигнал ложного срабатывания. Когда мощность первого измеряемого сигнала больше сигнального порога, устройство 120 обработки может определить сигнал в интервале между сигналом и порогом первого измеряемого сигнала в пределах диапазона порогового времени в качестве измеряемого сигнала. Дополнительное описание для измеряемого сигнала по меньшей мере одного датчика 110 можно найти в другом месте в настоящем раскрытии и здесь он не описывается.
На фиг. 3 представлена блок-схема примерной системы управления целевым объектом в соответствии с некоторыми вариантами осуществления настоящего раскрытия. Как показано на фиг. 3, система 300 управления целевым объектом может содержать модуль 310 получения измеряемого сигнала, модуль 320 идентификации признака сигнала и модуль 330 определения действия. В некоторых вариантах осуществления система 300 управления целевым объектом может быть реализована системой 100 управления целевым объектом (например, устройством 120 обработки), показанной на фиг. 1.
В некоторых вариантах осуществления модуль 310 получения измеряемого сигнала может быть выполнен с возможностью получения измеряемого сигнала датчика вибрации. В некоторых вариантах осуществления модуль 310 получения измеряемого сигнала может также быть выполнен с возможностью получения измеряемого сигнала по меньшей мере от одного датчика 110.
В некоторых вариантах осуществления модуль 320 идентификации признака сигнала может быть выполнен с возможностью идентификации признака сигнала для измеряемого сигнала вибрации. В некоторых вариантах осуществления модуль 320 идентификации признака сигнала может также быть выполнен с возможностью идентификации признака сигнала для измеряемого сигнала.
В некоторых вариантах осуществления модуль 330 определения действия может быть выполнен с возможностью определения, основываясь на признаке сигнала, действия целевого объекта, связанного по меньшей мере с одним датчиком 110. В некоторых вариантах осуществления модуль 330 определения действия может также быть выполнен с возможностью определения физиологического состояния пользователя, основываясь на признаке сигнала. В некоторых вариантах осуществления модуль 330 определения действия может также быть выполнен с возможностью определения, основываясь на физиологическом состоянии пользователя, действия целевого объекта, связанного по меньшей мере с одним датчиком 110.
Следует заметить, что приведенное выше описание системы 300 управления целевым объектом и ее устройствами/модулями представлено просто для удобства описания и не предназначено ограничивать контекст настоящего раскрытия. Следует понимать, что специалисты в данной области техники после ознакомления с принципом работы системы могут произвольно объединять различные компоненты или формировать подсистемы для соединения с другими компонентами, не отступая от этого принципа. Например, модуль 320 идентификации признака сигнала и модуль 330 определения действия, показанные на фиг. 3, могут быть разными модулями, реализованными в устройстве (например, в устройстве 120 обработки), или одним модулем, способным реализовывать функции вышеупомянутых двух или более модулей. В качестве другого примера, каждый модуль может иметь свой собственный модуль запоминающего устройства. В качестве еще одного примера, каждый модуль может использовать модуль запоминающего устройства совместно. Такие варианты все еще остаются в рамках настоящего раскрытия.
На фиг. 4 представлена блок-схема, поясняющая примерный процесс управления целевым объектом в соответствии с некоторыми вариантами осуществления настоящего раскрытия. Конкретно, способ 400 управления целевым объектом может выполняться системой 100 управления целевым объектом (например, устройством 120 обработки). Например, способ 400 управления целевым объектом может храниться в запоминающем устройстве (таком как автономное запоминающее устройство для устройства 120 обработки или запоминающее устройство 140) в форме программы или команд. Способ 400 управления целевым объектом может реализовываться, когда система 100 управления целевым объектом (например, устройство 120 обработки) выполняет программу или команды. Процесс, описанный ниже, служит просто для цели иллюстрации. В некоторых вариантах осуществления процесс 400 может выполняться с одной или более дополнительными операциями, не описанными здесь, и/или без одной или более обсуждавшихся операций. Кроме того, порядок операций процесса 400, показанного на фиг. 4 и описанного ниже, не является ограничивающим. В некоторых вариантах осуществления процесс 400 может быть применен к областям смарт-дома, смарт-автомобиля, смарт-фабрики, смарт-динамика, смарт-игрушки и т.п.
На этапе 410 устройство 120 обработки может получить измеряемый сигнал датчика вибрации. В некоторых вариантах осуществления этап 410 может выполняться модулем 310 получения измеряемого сигнала.
Датчик вибрации может собирать сигнал вибрации. Например, датчик вибрации может быть микрофоном (также упоминаемым как микрофон костной проводимости), измерителем ускорения и т.д. с костной проводимостью как одним из основных способов передачи звука. В некоторых вариантах осуществления датчик вибрации может собирать сигнал вибрации в конкретной области. Конкретная область может быть условно установленной областью для приема сигналов вибрации или может также упоминаться как область приема вибрации. В некоторых вариантах осуществления датчик вибрации может получать сигнал вибрации в области приема вибрации и формировать соответствующий измеряемый сигнал. Измеряемый сигнал, сформированный при получении сигнала вибрации, можно также называться измеряемым сигналом вибрации. Измеряемый сигнал вибрации может быть, например, электрическим сигналом.
В некоторых вариантах осуществления датчик вибрации может содержать корпус. Корпус может обладать определенной твердостью, чтобы облегчить передачу сигнала вибрации. Например, корпус датчика вибрации может использоваться в качестве области приема вибрации. Пользователь может выполнять определенное действие над корпусом (например, ударять, похлопывать, скоблить и т.п. или любое их сочетание), чтобы формировать определенный сигнал вибрации. Этот определенный сигнал вибрации может соответствовать команде на определенное действие.
Благодаря малым потерям механической вибрации в твердом теле, область приема вибрации не обязательно должна располагаться в месте расположения датчика вибрации (например, корпуса датчика вибрации). В некоторых вариантах осуществления область приема вибрации может быть расположена в месте, от которого механическая вибрация может эффективно передаваться. В некоторых вариантах осуществления область приема вибрации может обеспечиваться на твердой среде. Твердая среда может быть металлической (например, нержавеющая сталь, алюминиевый сплав и т.д.), неметаллической (например, древесина, пластмасса и т.д.) и т.д. Датчик вибрации может соединяться с областью приема вибрации через твердую среду и принимать сигнал вибрации, вводимый в область приема вибрации. Сигнал вибрации, принимаемый областью приема вибрации, может передаваться к датчику вибрации через твердую среду. В некоторых вариантах осуществления областью приема вибрации может быть выбранная область в твердой среде. Например, в вариантах осуществления, показанных на фиг. 6, датчик вибрации может быть расположен на двери 610 и/или на спинке 630 кровати. Как другой пример, в варианте осуществления, показанном на фиг. 8, датчик вибрации может быть расположен на рулевом колесе 820.
В некоторых вариантах осуществления датчик вибрации может быть устойчиво соединен с твердой средой. Способ фиксированного соединения может содержать, но не ограничиваясь только этим, склеивание, штамповку, сварку, клепку, винтовое соединение, соединение застежкой и т.д., чтобы гарантировать хороший и жесткий контакт датчика вибрации с твердой средой, так чтобы сигнал вибрации мог точно и эффективно передаваться от твердой среды к датчику вибрации. Например, в вариантах осуществления, показанных на фиг. 6, по меньшей мере один датчик вибрации может быть связан с дверью 610 или по меньшей мере один датчик вибрации может быть связан со спинкой 630 кровати или соединен с боковой стенкой винтами. Как другой пример, в вариантах осуществления, показанных на фиг. 8, по меньшей мере один датчик вибрации может быть заштампован в рулевое колесо 820. В некоторых конкретных вариантах осуществления датчик вибрации может быть соединен с твердой средой посредством связки, что может быть не только удобным и быстрым для соединения, но также и простым для разборки. В некоторых случаях датчик вибрации может быть заштампован или связан с твердой средой (например, дверь 610 и боковая стенка внутри помещения 600, рулевое колесо 810 в среде 800 использования и т.д.). Благодаря малым потерям механической вибрации, передаваемой в твердой среде, мощность сигнала может оставаться достаточно большой при большом расстоянии, поэтому область ввода сигнала (то есть, область приема вибрации) может быть эффективно расширена. Сигнал вибрации может вводиться в пределах широкого диапазона, что может избавить пользователя от затруднений при обнаружении рабочей панели или кнопки и повысить удобство использования пользователем. В некоторых случаях, особенно в темной среде, можно не допустить движения пользователя наугад, чтобы найти управление освещением 640 (например, во внутреннем помещении 600, чтобы обнаружить выключатель освещения 640, пользователю может понадобиться идти к месту, в котором переключатель установлен на боковой стенке), натыкаясь на стол и стулья и т.д.
В некоторых вариантах осуществления датчик вибрации может быть расположен на любом участке твердой среды. Используя в качестве примера дверь 610, показанную на фиг. 6, примерное место установки может содержать дверную раму двери 610, ручку двери 610, нижнюю часть двери 610, центр двери 610 и т.д. В некоторых вариантах осуществления датчик вибрации может быть расположен в месте с большой амплитудой вибрации на твердой среде. Например, когда пользователь стучит в дверь 610, амплитуда около центра двери 610 может обычно быть большой и сигнал вибрации, принимаемый датчиком вибрации, может быть более сильным.
Например, датчик вибрации может быть приклеен к двери 610 и верхняя половина области двери 610 может служить в качестве области приема вибрации. Пользователь может выполнять определенные операции в области верхней половины двери 610 (то есть, области приема вибрации) и сформированный сигнал вибрации может передаваться датчику вибрации, соединенному с дверью 610, через дверь 610.
В некоторых вариантах осуществления областью приема вибрации может быть, по меньшей мере, участок твердой среды. В некоторых вариантах осуществления область приема вибрации может быть расположена там, где пользователю удобно действовать (например, ударять, похлопывать или скоблить). Например, во внутреннем помещении 600, показанном на фиг. 6, твердая среда может быть дверью 610 и областью приема вибрации может быть поверхность двери 610, обращенная наружу из внутреннего помещения 600. Как другой пример, во внутреннем помещении 600, область верхней половины двери 610 может служить областью приема вибрации. В некоторых вариантах осуществления область приема вибрации может иметь любое местоположение, форму и/или размер. Например, твердая среда может быть спинкой кровати 630 и областью приема вибрации может быть спинка 630 кровати или определенная область на ней (например, правая сторона, левая область спинки 630 кровати и т.д.). В качестве другого примера, когда твердая среда является спинкой 630 кровати, вся поверхность спинки 630 кровати, обращенная к пользователю, может служить областью приема вибрации.
В некоторых вариантах осуществления областью приема вибрации может также быть независимая конструкция, расположенная на твердой среде. Например, областью приема вибрации может быть поверхность приема вибрации, расположенная на поверхности двери 610. Поверхность приема вибрации может быть жестким, подобным листу объектом или пластинчатым объектом, например, железным листом, стальной пластиной и т.п. В некоторых вариантах осуществления поверхность приема вибрации может разъемным образом соединяться с твердой средой. В некоторых вариантах осуществления поверхность приема вибрации может быть установлена в любом месте твердой среды согласно потребностям пользователя. Например, в вариантах осуществления, показанных на фиг. 6, пользователь обычно располагается на правой стороне кровати 620, поэтому поверхность приема вибрации может быть расположена в правой области спинки 630 кровати.
Кроме того, в некоторых вариантах осуществления, областью приема вибрации может также быть участок датчика вибрации. Корпус датчика вибрации, описанный в вышеупомянутых вариантах осуществления, может служить областью приема вибрации.
Чтобы не допустить, чтобы пользователь поранился, выполняя конкретную операцию по вводу сигнала вибрации, в некоторых вариантах осуществления, корпус датчика вибрации (например, внешний корпус датчика) и/или область приема вибрации не должны иметь острых краев и углов. Например, внешняя поверхность корпуса датчика вибрации может быть установлена как поверхность по дуге окружности. В некоторых вариантах осуществления следует избегать установки датчика вибрации в месте, в котором пользователь часто выполняет определенные действия. Например, пользователь, спящий на правой стороне кровати 620, обычно стучит, постукивает и/или скребет правый край спинки 630 кровати, поэтому датчик вибрации может быть запрессован в спинку 630 кровати или датчик вибрации может быть расположен в месте, обращенном снаружи правой стороны спинки 630 кровати (например, верхняя область, правая область и т.д. спинки 630 кровати), так чтобы пользователь не касался внешнего корпуса датчика вибрации, выполняя конкретное движение.
В некоторых вариантах осуществления датчик вибрации может питаться от батареи, расположенной внутри. Примерные типы батареи могут содержать литиевую батарею, водородный топливный элемент, щелочную цинково-марганцевую батарею, кадмий-никелевую батарею, водородно-никелевую батарею и т.д. В некоторых вариантах осуществления датчик вибрации может питаться от внешнего источника питания. Например, датчик вибрации может соединяться с внешним источником питания, используя шнур питания или беспроводной зарядный модуль для питания от внешнего источника питания. Внешний источник питания может быть, например, портативным зарядным устройством, домашней электрической розеткой и т.д.
Датчик вибрации может иметь определенный объем. В некоторых вариантах осуществления объем датчика вибрации может быть между 1 мм3 и 10 см3. В некоторых вариантах осуществления объем датчика вибрации может быть между 0,5 мм3 и 20 см3. В некоторых вариантах осуществления объем датчика вибрации может быть между 1,5 мм3 и 5 см3. В некоторых вариантах осуществления объем датчика вибрации может быть между 2 мм3 ~ 1 см3.
В некоторых вариантах осуществления, чтобы позволить датчику вибрации полностью и точно собирать сигнал вибрации, вводимый пользователем, может потребоваться использовать некоторое требование к чувствительности датчика вибрации. Чувствительность может пониматься как величина отклика датчика на определенный сигнал во время работы. В некоторых вариантах осуществления чувствительность датчика вибрации может составлять (-50) дБВ/(м/с2) – (-10) дБВ/(м/с2). В некоторых вариантах осуществления чувствительность датчика вибрации может составлять (-35) дБВ/(м/с2) –(-15) дБВ/(м/с2). В некоторых вариантах осуществления чувствительность датчика вибрации может составлять (-30) дБВ/(м/с2) – (-15) дБВ/(м/с2). В некоторых вариантах осуществления чувствительность датчика вибрации может составлять (-25) дБВ/(м/с2) – (-20) дБВ/(м/с2).
На этапе 420 устройство 120 обработки может идентифицировать признак сигнала для измеряемого сигнала вибрации. В некоторых вариантах осуществления этап 420 может быть выполнен модулем 320 идентификации признака сигнала.
В некоторых вариантах осуществления устройство 120 обработки может обрабатывать измеряемый сигнал вибрации (например, обработка во временной области и/или обработка в частотной области и т.д.) и выводить измеряемый сигнал вибрации в виде спектра признака сигнала. Основываясь на спектре признака сигнала, устройство 120 обработки может идентифицировать признак сигнала для измеряемого сигнала. Например, устройство 120 обработки может считывать соответствующую информацию, такую как количество пиков вибрации, частотные составляющие сигнала и т.д., из спектра признака сигнала. В некоторых вариантах осуществления устройство 120 обработки может также напрямую идентифицировать признак сигнала, основываясь на соответствующих данных/информации сигнала вибрации, собранной датчиком вибрации. Например, устройство 120 обработки может вычислить временной интервал между двумя соседними пиками вибрации в соответствии со временем, в течение которого получены два пика вибрации.
В некоторых вариантах осуществления устройство 120 обработки может идентифицировать по меньшей мере один признак сигнала для измеряемого сигнала, такой как количество пиков вибрации, мощность сигнала, временной интервал между двумя соседними пиками вибрации, частотные составляющие, длительность сигнала и т.п. или любое их сочетание. Например, устройство 120 обработки может идентифицировать признак сигнала для измеряемого сигнала как три пика вибрации. В качестве другого примера, устройство 120 обработки может одновременно идентифицировать количество пиков вибрации и временной интервал между двумя соседними пиками вибрации. Например, устройство 120 обработки может идентифицировать признак сигнала для измеряемого сигнала как наличие трех пиков вибрации в пределах 2 секунд. Временной интервал между двумя предыдущими пиками вибрации может быть коротким (например, 0,1 с, 0,2 с, 0,3 с, 0,4 с, 0,5 с и т.д.). Временной интервал между два последующими пиками вибрации может быть длинным (например, 1,1 с, 1,2 с, 1,3 с, 1,4 с, 1,5 с и т.д.). Как другой пример, блок 420 обработки сигналов может одновременно идентифицировать частотные составляющие, мощность сигнала и длительность сигнала для измеряемого сигнала. Например, блок 420 обработки сигналов может идентифицировать, что признак сигнала для измеряемого сигнала состоит в том, что существует множество компонент со средней частотой и высокой частотой сигналов (например, среднечастотные и высокочастотные сигналы составляют более 70%), амплитуда вибрации (то есть, мощность сигнала) является малой и длительность сигнала является короткой (например, сигнал длится всего в течение 1 секунды) и сформированный пик вибрации относительно острый.
В некоторых вариантах осуществления устройство 120 обработки может идентифицировать признак сигнала для измеряемого сигнала вибрации, основываясь на модели извлечения признака. Устройство 120 обработки может вводить измеряемый сигнал в модель извлечения признака. Выходной результат модели извлечения признака может содержать по меньшей мере одну признак сигнала для измеряемого сигнала вибрации из таких как количество пиков вибрации, мощность сигнала, временной интервал между двумя соседними пиками вибрации, частотные составляющие, длительность сигнала и т.п. или любое их сочетание. В некоторых вариантах осуществления модель извлечения признака может быть моделью машинного обучения. Модель извлечения признака может быть обученной моделью машинного обучения. Эта модель машинного обучения может содержать различные модели и структуры, такие как трехмерная модель нейронной сети, рекуррентная модель нейронной сети, структура модели пользователя и т.д., что не может ограничиваться в настоящем раскрытии.
В некоторых вариантах осуществления при обучении модели извлечения признака в качестве учебных данных может использоваться множество сигналов обнаружения вибрации с метками (или идентификаторами). Параметры модели могут изучаться обычными способами, такими как снижение градиента. В некоторых вариантах осуществления модель извлечения признака может обучаться в других устройствах или модулях.
На этапе 430 устройство 120 обработки, основываясь на признаке сигнала, может определить действие целевого объекта, связанного по меньшей мере с одним датчиком 110. В некоторых вариантах осуществления этап 430 может выполняться модулем 330 определения действия.
В некоторых вариантах осуществления устройство 120 обработки может дополнительно определить рабочие команды, выполняемые с возможностью управления целевым объектом для осуществления действия. Рабочие команды могут подавать целевому объекту команды (например, оконечному устройству 130) выполнить действие. Например, в варианте осуществления, показанном на фиг. 6, рабочие команды могут подать команду на включение или выключение освещения 640. В варианте осуществления пользователь может формировать определенный сигнал вибрации для выполнения конкретного действия. Датчик вибрации может собирать эти сигналы вибрации и формировать соответствующие измеряемые сигналы для обработки устройством 120 обработки. Устройство 120 обработки может определять действие целевого объекта, достигая, таким образом, цели управления целевым объектом. По сравнению с речевым взаимодействием, шум в среде может оказывать небольшое влияние на сигнал вибрации. Даже в среде с высоким уровнем шума сигнал вибрации может продолжать полностью и эффективно собираться датчиком вибрации, который может сделать действие или рабочие команды для целевого объекта, определяемые устройством 120 обработки сигналов, более точными.
В некоторых вариантах осуществления устройство 120 обработки может определить, соответствует ли идентифицированный признак сигнала по меньшей мере одному из множества заданных признаков. Состояние заданного признака может содержать один заданный признак, множество заданных признаков или любое их сочетание. В некоторых вариантах осуществления устройство 120 обработки может использовать признак сигнала, соответствующий определенному действию целевого объекта как заданному состоянию признака. В некоторых вариантах осуществления каждое заданное состояние признака может соответствовать определенному действию целевого объекта и/или командам, выполняемым с возможностью управления целевым объектом для выполнения определенного действия. Например, заданное состояние признака может состоять в том, что три пика вибрации появляются в пределах 1 с и временной интервал между двумя соседними пиками вибрации равен или близок (например, разность в пределах порогового диапазона 0,3 с, 0,5 с, 0,8 с и т.д.). Заданное состояние признака может указать, что пользователь стучит или постукивает в области приема вибрации 3 раза с одним и тем же или близким временным интервалом в пределах 1 с. В качестве другого примера, три пика вибрации могут появляться в пределах 2 с (указывая, что пользователь стучит и постукивает 3 раза в пределах 3 с). Временной интервал между двумя предыдущими пиками вибрации может быть коротким (например, 0,5 с), а временной интервал между двумя последующими пиками вибрации может быть длинным (например, 2 с) или временной интервал между двумя предыдущими пиками вибрации может быть длинным (например, 2 с), а временной интервал между два последующими пиками вибрации может быть коротким (например, 0,5 с). Каждое заданное состояние признака может соответствовать различным действиям или рабочим командам целевого объекта. Например, заданное состояние признака может состоять в том, что рабочие команды, соответствующие двум пикам вибрации в пределах 1 с, должны включать или выключать свет (например, освещение 640 на фиг. 6). В качестве другого примера, заданное состояние признака может состоять в том, что три пика вибрации появляются в пределах 3 с. Временной интервал между двумя предыдущими пиками вибрации может быть коротким. Временной интервал между два последующими пиками вибрации может быть длинным и соответствующие рабочие команды могут включить освещение 640 в режим теплого света. Заданное состояние признака может состоять в том, что три пика вибрации появляются в пределах 3 с. Временной интервал между двумя предыдущими пиками вибрации может быть более длинным. Временной интервал между двумя последующими пиками вибрации может быть коротким и соответствующие рабочие команды могут включить освещение 640 в режим люминесценции.
В некоторых вариантах осуществления пользователь может также установить заданное состояние признака и действие или рабочую команду, соответствующую определенной цели, удовлетворяющей потребностям пользователя. Например, пользователь может установить заданное состояние признака, соответствующее обычно используемому действию, в качестве упрощенного заданного состояния признака (например, содержащего несколько признаков сигнала), которого легче достигнуть. Например, пользователь может установить заданное состояние признака, соответствующее действию включения освещения 640, как два пика вибрации в пределах 1 с, так чтобы освещение 640 могло быстро включаться каждый раз, когда пользователь входит во внутреннее помещение 600.
В некоторых вариантах осуществления заданный признак может содержать только один признак сигнала, который может быть удобен для пользователя, чтобы помнить и действовать. В некоторых вариантах осуществления состояние заданного признака может быть сочетанием множества признаков сигнала, чтобы достигнуть более сложного управления и избежать одновременного ложного срабатывания из-за сочетания различных признаков сигнала. В некоторых конкретных вариантах осуществления состояние заданного признака может содержать мощность сигнала и количество пиков вибрации. Например, два пика вибрации могут появиться в пределах 1 с. Пиковое значение предыдущего пика вибрации может быть малым, а пиковое значение следующего пика вибрации может быть большим, или пиковое значение предыдущего пика вибрации может быть большим, а пиковое значение следующего пика вибрации может быть малым, что может соответственно указывать две различные рабочие команды.
В некоторых конкретных вариантах осуществления, когда пользователь стучит и постукивает по твердой среде в различных частях, в твердой среде могут формироваться различные сигналы вибрации (например, сигналы вибрации с различными частотными составляющими, длительностями и/или мощностями сигнала). Соответственно, измеряемый сигнал вибрации, сформированный датчиком вибрации, может также отличаться (например, измеряемые сигналы вибрации с различными частотными составляющими, длительностями и/или мощностями сигнала). В этом случае, частотные составляющие, длительность и/или мощность сигнала могут объединяться, чтобы сформировать более конкретное состояние признака, соответствующее более сложным действиям.
На фиг. 5A-5D представлены спектры признаков сигналов для сигналов вибрации, сформированных различными действиями пользователя в соответствии с некоторыми вариантами осуществления настоящего раскрытия. На фиг. 5A-5D последовательно показаны спектры признаков сигналов для сигналов вибрации, сформированных ударом ногтем, ударом одним пальцем, ударом несколькими пальцами и ладонью. Как показано на фиг. 5A-5D, измеряемые сигналы вибрации, соответствующие удару ногтем, удару одним пальцем, удару несколькими пальцами и ладонью, отличаются. Например, текстура ногтя может быть относительно жесткой, поэтому измеряемый сигнал может иметь много среднечастотных и высокочастотных сигнальных составляющих. Амплитуда вибрации обычно может быть малой, длительность одиночного пика вибрации может быть короткой и сформированный пик вибрации может быть относительно острым. Как другой пример, сила удара одним пальцем обычно может быть больше, чем при ударе ногтем, и за счет амортизации кожной тканью в измеряемом сигнале могут возрастать низкочастотные или средние-низкочастотные сигнальные составляющие и длительность сигнала также может увеличиваться. В качестве еще одного примера, во время удара несколькими пальцами множество суставов не могут касаться поверхности твердой среды одновременно, поэтому может формироваться множество пиков вибрации, которые близких друг к другу. Как еще один пример, мышечная ткань ладони может быть больше, чем на суставах, поэтому при похлопывании может иметь место более значительная амортизация и может иметься большая площадь контакта с поверхностью твердой среды, приводя в результате к более среднечастотным и низкочастотным сигнальным составляющим в сигнале вибрации, сформированным ударом ладонью, и к относительно большой длительности сигнала. В некоторых вариантах осуществления пользователь может также хлопать, стучать и скрести различными инструментами, чтобы сформировать измеряемые сигналы вибрации с различными признаками сигнала, соответствующие большему количеству рабочих команд, чтобы достигнуть более сложного управления. Например, когда твердая среда соприкасается с объектами, такими как ключ, мобильный телефон, чашка с водой, перчатка и т.д., может формироваться сигнал вибрации с различными признаками сигнала. В некоторых случаях пользователь может использовать различные инструменты, чтобы добиться более сложного управления устройством, в то же время избегая ложного срабатывания. Например, во внутреннем помещении 600, показанном на фиг. 6, пользователь может использовать ключ, чтобы постучать в дверь 610 три раза в пределах 1 с, чтобы выключить или включить освещение 640. Освещение 640 может включиться в режиме теплого света, если постучать в дверь 610 три раза в пределах 1 с пальцем, что может помочь эффективно избежать ложного срабатывания.
В некоторых вариантах осуществления модуль 420 обработки сигналов может определить, соответствует ли признак сигнала заданному состоянию признака, основываясь на разности между признаком сигнала для измеряемого сигнала и заданным состоянием признака. Например, заданное состояние признака может заключаться в том, что два пика вибрации могут появиться в пределах 1 с и мощность второго пика вибрации может быть ниже, чем мощность первого пика вибрации (то есть, 2 раза в пределах 1 с. Первый удар может быть сильным, а следующий удар может быть слабым), модуль 420 обработки сигналов 420 может определить количество пиков вибрации, которые появляются в собранном сигнале обнаружения в пределах 1 с. Если количество пиков вибрации не равно 2, может быть решено, что признак сигнала не соответствует заданному состоянию признака. Если количество пиков вибрации равно 2, модуль 420 обработки сигналов может продолжить определение мощностей двух пиков вибрации измеряемого сигнала, и решить, ниже ли мощность сигнала второго пика вибрации, чем мощность сигнала первого пика вибрации. Может быть определено, что признак сигнала не соответствует заданному состоянию признака, в ответ на определение, что мощность сигнала второго пика вибрации не ниже, чем мощность сигнала первого пика вибрации. Может быть определено, что признак сигнала соответствует заданному состоянию признака, в ответ на определение, что мощность сигнала второго пика вибрации ниже, чем мощность сигнала первого пика вибрации.
В некоторых вариантах осуществления устройство 120 обработки может определить, соответствует ли признак сигнала заданному состоянию признака, основываясь на сигнальном спектре признака измеряемого сигнала и сигнальном спектре признака для заданного состояния признака. Например, устройство 120 обработки может сравнить сигнальный спектр признака измеряемого сигнала с сигнальным спектром признака для заданного состояния признака. Если сигнальные кривые в двух сигнальных спектрах признаков совпадают или подобны, можно принять решение, что признак сигнала соответствует заданному состоянию признака.
В некоторых вариантах осуществления устройство 120 обработки может определить, соответствует ли признак сигнала заданному состоянию сигнала, основываясь на заданной модели идентификации состояния признака. Когда признак сигнала соответствует заданному состоянию признака, устройство 120 обработки может определить действие или рабочую команду, соответствующую признаку сигнала.
В некоторых вариантах осуществления модель идентификации заданного состояния признака может быть моделью машинного обучения. В некоторых вариантах осуществления устройство 120 обработки может использовать спектр сигнала признака для измеряемого сигнала, собранного датчиком вибрации, в качестве входных данных модели машинного обучения. Результат, состоящий в том, соответствует ли признак сигнала заданному состоянию признака, может быть получен из модели машинного обучения. В некоторых вариантах осуществления модель идентификации заданного состояния признака может быть обучаемой моделью машинного обучения. Учебный процесс модели идентификации заданного состояния признака может быть тем же самым или подобным учебному процессу модели извлечения признака.
Устройство 120 обработки может обрабатывать изображение сигнального спектра признаков измеряемого сигнала, используя обученную модель идентификации заданных состояний признака, и определяя, соответствует ли признак сигнала в спектре признаков сигнала заданному состоянию признака. В некоторых вариантах осуществления модель идентификации заданного состояния признаков может содержать нейронную сетевую модель, модель логической регрессии, машину векторной поддержки и т.п. Например, принимая в качестве примера модель нейронной сети, модель нейронной сети может содержать множество уровней, таких как входной уровень, один или более сверхточных уровней, один или более нелинейных уровней активации, один или более уровней пулинга, один или один полностью соединенный уровень и/или выходной уровень. Модель нейронной сети может получать спектр признаков сигнала на входном уровне, извлекать и/или различать визуальные признаки или образцы из изображения, используя промежуточного уровня, и выводить спектр признаков сигнала с признаками или образцами характерных точек на выходном уровне. Например, идентифицированные характерные точки могут быть помечены идентификаторами признаков или векторами признаков. В некоторых вариантах осуществления идентифицированные характерные точки могут быть представлены точками признаков сигнала, такими как наивысшая точка и низшая точка пика вибрации, конечная точка и начальная точка пика вибрации и т.д.
В некоторых вариантах осуществления, когда признак сигнала соответствует заданному состоянию признака, устройство 120 обработки может определить действие целевого объекта, соответствующее заданному состоянию признака.
В некоторых случаях пользователь часто непреднамеренно или по необходимости выполняет определенные действия, чтобы сформировать сигналы вибрации, вызывающие выполнение целевым объектом ложного срабатывание (например, переключение оконечного устройства 130 из первого состояния во второе состояние). Например, принимая в качестве примера внутреннее помещение 600, показанное на фиг. 6, когда пользователь спит на кровати 620, его рука или голова могут по ошибке коснуться спинки 630 кровати, формируя, таким образом, сигнал вибрации. Сигнал вибрации может быть собран датчиком вибрации, расположенным на спинке 630 кровати, чтобы сформировать соответствующий измеряемый сигнал. Например, если признак сигнала для измеряемого сигнала просто соответствует заданному состоянию признака, при котором команда операции должна включить освещение 640, устройство 120 обработки может управлять освещением 640, включая освещение по ошибке, что влияет на сон пользователя и может в некоторой степени ухудшить впечатление пользователя от использования системы.
Поэтому, чтобы избежать вышеупомянутой ситуации, в некоторых вариантах осуществления устройство 120 обработки может блокировать измеряемый сигнал, получаемый от датчика вибрации. Устройство 120 обработки может получать измеряемый сигнал по меньшей мере от одного датчика вибрации в реальном времени или периодически. Когда устройство 120 обработки получает измеряемый сигнал (также упоминаемый как первый измеряемый сигнал), устройство 120 обработки может резервировать в качестве измеряемого сигнала сигнал, для которого интервал между сигналом и первым измеряемым сигналом находится в пределах диапазона порогового времени (например, 1 с, 2 с, 3 с, 5с, 10 с 15 с и т.д.). В некоторых вариантах осуществления устройство 120 обработки может определить, превышает ли первый измеряемый сигнал сигнальный порог. Сигнальный порог может быть параметром, который должен измеряться для определения, формируется ли измеряемый сигнал путем касания по ошибке пользователя или из-за сознательного действия пользователя. В некоторых вариантах осуществления сигнальный порог может быть порогом мощности сигнала. В некоторых вариантах осуществления порог мощность сигнала может составить 2 дБ – 10 дБ. В некоторых вариантах осуществления порог мощности сигнала может составить 4 дБ – 8 дБ. В некоторых вариантах осуществления порог мощности сигнала может составить 6 дБ. Например, когда первый измеряемый сигнал больше порога мощности сигнала, можно считать, что первый измеряемый сигнал сформирован сознательным действием пользователя. Поэтому устройство 120 обработки может назначать сигнал в пределах временного диапазона (например, порогового диапазона времени) после первого измеряемого сигнала в качестве измеряемого сигнала. Для сигнала, мощность которого меньше порога мощности сигнала, можно считать, что первый измеряемый сигнал формируется касанием пользователя по ошибке и поэтому никакая обработка не должна выполняться.
В другом сценарии применения пользователь может иметь домашнюю кошку и домашняя кошка может скрестись в дверь 610, формируя сигнал вибрации. Сигнал вибрации может собираться датчиком вибрации, чтобы сформировать соответствующий измеряемый сигнал. Например, если признак сигнала для измеряемого сигнала только соответствует заданному признаку сигнала и рабочая команда, соответствующая заданному состоянию признака, состоит в том, чтобы включить или выключить освещение 640, освещение 640 может быть включено или выключено по ошибке. Поэтому в некоторых вариантах осуществления устройство 120 обработки может предотвратить ложное срабатывание, основываясь на определении, является ли объект, вводящий сигнал вибрации, пользователем и конкретным объектом, назначенным пользователем, который может подать рабочую команду. В некоторых вариантах осуществления устройство 120 обработки может определить, является ли объект, вводящий сигнал вибрации, пользователем или конкретным объектом, который может подать рабочую команду, основываясь на информации, связанной с объектом, вводящим сигнал вибрации. Например, контурное изображение объекта, вводящего сигнал вибрации, может быть получено через камеру. Можно определить, является ли объект, вводящий сигнал вибрации, пользователем или конкретным, соответствующим контурному изображению объектом, который может подать рабочую команду. Когда устройство 120 обработки решает, что объект, вводящий сигнал вибрации, не является пользователем или конкретным объектом, который может подать рабочую команду, устройство 120 обработки может не выполнять никакие действия.
На фиг. 6 схематично представлено внутреннее помещение, снабженное оконечным устройством, соответствующим некоторым вариантам осуществления настоящего раскрытия. Хотя описание технологии, представленной в варианте осуществления, приводится со ссылкой на дом, здание или отель, специалисты в данной области техники должны понимать, что признаки, процессы, алгоритмы и механизмы, реализуемые через эти технологии, могут легко быть применены к другим помещениям, таким как офис, склад, гараж или другие помещения.
В некоторых вариантах осуществления внутреннее помещение 600 может быть частью здания, домашнего помещения или отеля. Например, внутреннее помещение 600 может быть спальней или гостиной в здании пользователя. Например, внутреннее помещение 600 может быть одной из комнат в отеле, в котором остановился пользователь. В некоторых вариантах осуществления внутреннее помещение 600 можно быть снабжено одним или более оконечными устройствами 130 (например, освещение 640). Одно или более оконечные устройства 130 могут управляться устройством 120 обработки.
В некоторых примерных сценариях применения дверь 610 может быть установлена на входе во внутреннее помещение 600. Освещение 640 (например, лампочка, арматура, лампа и т.д.) устанавливаются на боковой стенке или на потолке внутреннего помещения 600. Выключатель 640 освещения может располагаться на боковой стенке около освещения 640 помещения. Пользователь может управлять освещением 640 помещения, которое должно выключаться или включаться через переключатель. Кровать 620 может быть установлена на полу у боковой стенки внутреннего помещения 600. Кровать 620 может иметь спинку 630 кровати. Кроме того, дверь 610 и спинка 630 кровати могут быть физически соединены (например, склеены) с датчиком 110 (например, с датчиком вибрации). Датчик вибрации может собирать сигнал вибрации, вводимый пользователем. Устройство 120 обработки может идентифицировать признак сигнала для измеряемого сигнала и определять, соответствует ли признак сигнала заданному состоянию признака. Когда устройство 120 обработки решает, что признак сигнала соответствует заданному состоянию признака, целевому объекту (например, переключателю 640 освещения) может быть послана рабочая команда, и целевой объект может управляться для выполнения действия (например, включения, выключения, регулирования цветовой температуры, регулирования яркости и т.д. освещения 640).
Например, когда пользователь входит во внутреннее помещение 600 ночью (например, когда пользователь приходит домой с работы и входит в гостиную или спальню ночью), пользователю может понадобиться включить свет 640. Датчик вибрации может обеспечиваться на двери 610. Пользователь может ввести сигнал вибрации посредством стука, постукивания или поскребя по двери 610. Основываясь на определении, что признак сигнала для измеряемого сигнала, сформированный сигналом вибрации, соответствует заданному состоянию признака, можно управлять освещением (например, включением освещения), что может быть более удобным и более безопасным по сравнению с движением к боковой стене, чтобы включить переключатель. В некоторых вариантах осуществления областью приема вибрации может служить определенная область на двери 610. Например, областью приема вибрации может служить ручка двери. Когда пользователь открывает дверь 610, пользователь может подать рабочую команду включить свет, стуча, постукивая, поскоблив в области приема вибрации. В качестве другого примера, областью приема вибрации может служить поверхность двери 610. Датчик вибрации может быть соединен с областью приема вибрации через поверхность двери 610 и принимать вводимый сигнал вибрации в области приема вибрации. Датчик вибрации может находиться в таком месте, как центр двери 610, край двери 610 и т.д. В некоторых вариантах осуществления, так как, когда пользователь стучит или постукивает, центр двери 610 имеет высокую амплитуду, датчик вибрации может обеспечиваться (например, заштамповываться или приклеиваться) в центре двери 610.
В некоторых вариантах осуществления определенная область поверхности двери 610, обращенная наружу от внутреннего помещения 600, может служить областью приема вибрации. Например, область приема вибрации может быть расположена на верхней стороне поверхности двери 610, обращенной наружу от внутреннего помещения 600, так чтобы пользователь мог выполнять определенное действие рукой, чтобы ввести сигнал вибрации. Как другой пример, область приема вибрации может быть расположена на нижней стороне поверхности двери 610, обращенной наружу от внутреннего помещения 600, так чтобы пользователь мог вводить сигнал вибрации, ударяя по двери 610 ногой.
На фиг. 7 представлена блок-схема последовательности выполнения операций примерного процесса управления освещением во внутреннем помещении в соответствии с некоторыми вариантами осуществления настоящего раскрытия. В этом варианте осуществления, когда пользователь стучит по спинке 630 кровати непрерывно три раза, датчик вибрации, обеспечиваемый на спинке 630 кровати или механически соединенный со спинкой 630 кровати, может принимать сигнал вибрации и формировать соответствующий измеряемый сигнал. Устройство 210 обработки (например, микросхема датчика вибрации) может выполнить идентификацию признака для измеряемого сигнала и определять, имеет ли измеряемый сигнал три пика вибрации в пределах 1 с с интервалом не более 0,5 с между двумя пиками вибрации. Если это действительно так, может непрерывно определяться текущее состояние освещения 640. Если освещение 640 находится во включенном состоянии (то есть, в первом состоянии), может быть выдана команда на выключение освещения 640, чтобы переключить освещение 640 в выключенное состояние (то есть, во второе состояние). Если освещение 640 находится в выключенном состоянии (то есть, во втором состояние), может быть подана команда включения освещения 640, чтобы переключить освещение 640 во включенное состояние (то есть, в первое состояние). Если устройство 210 обработки определяет, что измеряемый сигнал не имеет трех пиков вибрации в пределах 1 с или временной интервал между двумя соседними пиками вибрации превышает 0,5 с, никакое действие выполняться не может.
Если переключатель находится не на стороне кровати, пользователю может понадобиться поискать переключатель в темноте, вставая ночью, и это может создать риск упасть или наткнуться на что-либо. Если датчик вибрации устанавливается на спинке кровати 630, освещением 640 можно управлять, выполняя определенное действие на спинке 630 кровати, что может быть не только более безопасным, но также и более удобным.
В некоторых вариантах осуществления вокруг кровати 620 может иметься множество переключателей и кнопок. Например, когда внутреннее помещение 600 является одной из комнат отеля, около спинки 630 кровати 620 обычно может располагаться множество переключателей управления целевым объектом (например, освещением 640). При необходимости управления конкретным целевым объектом, пользователю может понадобиться должен искать конкретный переключатель. Если на спинке 630 кровати устанавливается датчик вибрации, то целевым объектом можно управлять простым ударом, похлопыванием, скоблением или любым их сочетанием (например, выключая освещение 640 с помощью определенного действия).
В некоторых вариантах осуществления расположение внутреннего помещения 600 может не ограничиваться тем, что показано на фиг. 6. Например, во внутреннем помещении 600 могут также находиться другие целевые объекты, такие как смарт-телевизор, шторы, кондиционер и т.д. Через систему 100 пользователь может управлять и другими целевыми объектами. Например, шторы могут располагаться на боковой стенке внутреннего помещения 600 и пользователь может управлять шторами через систему 100. Например, можно постучать по спинке 630 кровати с одинаковыми или близкими временными интервалами в пределах 1 с, чтобы управлять шторами, которые будут сдвигаться или раздвигаться.
На фиг. 8 показан интерьер транспортного средства, снабженного оконечным устройством в соответствии с некоторыми вариантами осуществления настоящего раскрытия. В некоторых вариантах осуществления интерьер 800 транспортного средства может содержать одно или более оконечных устройств (таких как встроенный в транспортное средство кондиционер, встроенный динамик, автомобильные окна и т.д.). Система 100 может управлять одним или более оконечными устройствами.
В некоторых примерных сценариях применения датчик (например, датчик вибрации) может быть обеспечен на ящике для хранения в пассажирском сидении 810. Датчик вибрации может быть связан с встроенным в транспортное средство кондиционером на стороне пассажирского сиденья. Через систему 100 пользователь может управлять встроенным кондиционером на стороне пассажирского кресла. Например, пользователь может непрерывно стучать или постукивать по поверхности ящика 810 для хранения в пассажирском сидении. Датчик вибрации может формировать измеряемый сигнал после приема сигнала вибрации, сформированного ударом или постукиванием. Система 100 может идентифицировать признак сигнала для измеряемого сигнала и определить, соответствует ли признак сигнала заданному состоянию признака. Например, заданное состояние признака может соответствовать операции включения/выключения встроенного кондиционера. Если признак сигнала соответствует заданному состоянию признака, система 100 может управлять встроенным кондиционером со стороны пассажирского сиденья, который будет включаться/выключаться.
В некоторых примерных сценариях применения по меньшей мере датчик (например, датчик вибрации) может физически соединяться с рулевым колесом 820. Датчик вибрации может быть связан с оконечным устройством, таким как встроенный кондиционер, встроенный динамик, окно автомобиля и т.д. Точно также через систему 100 пользователь может управлять встроенным кондиционером, встроенным динамиком, окном автомобиля и т.д.
На фиг. 9 представлена блок-схема последовательности выполнения операций примерного процесса управления встроенным в транспортное средство оконечным устройством в соответствии с некоторыми вариантами осуществления настоящего раскрытия. В варианте осуществления, когда водитель стучит по рулевому колесу 820 непрерывно три раза, датчик вибрации, находящийся на рулевом колесе 820, может собирать сигнал вибрации и формировать измеряемый сигнал. Система 100 может идентифицировать признак сигнала для измеряемого сигнала и определять, соответствует ли признак сигнала заданному состоянию признака. Как пример, система 100 может идентифицировать, имеет ли измеряемый сигнал три пика вибрации в одном временном интервале или подобном временном интервале в пределах 2 с (то есть, количество пиков вибрации может быть равно 3 и временной интервал между двумя соседними пиками вибрации может быть одинаковым или схожим). Если это не так (то есть, признак сигнала для измеряемого сигнала не соответствует заданному состоянию признака), то никакое действие не может выполняться. Если это так (то есть, признак сигнала соответствует заданному состоянию признака), то текущее состояние встроенного кондиционера может быть получено. Если встроенный кондиционер находится во включенном состоянии (то есть, в первом состоянии), то может быть подана команда выключения встроенного кондиционера, чтобы переключить встроенный кондиционер в выключенное состояние (то есть, во второе состояние). Если встроенный кондиционер находится в выключенном состояния, то может быть подана команда включить встроенный кондиционер, чтобы переключить встроенный кондиционер из выключенного состояния. Как другой пример, система 100 может идентифицировать, имеет ли сигнал три пика вибрации с неравноценными временными интервалами в пределах 2 с. (например, временной интервал между первым пиком вибрации и вторым пиком вибрации может быть 1 с, а временной интервал между вторым пиком вибрации и третьим пиком вибрации может быть 2 с). Если это не так (то есть, признак сигнала для измеряемого сигнала не соответствует заданному состоянию признака), никакое действие не может выполняться. Если это так, (то есть, признак сигнала соответствует заданному состоянию признака), текущее состояние встроенного динамика может быть получено. Если встроенный динамик включен, может быть подана команда выключения встроенного динамика. Если встроенный динамик выключен, может быть подана команда включения встроенного динамика.
В некоторых вариантах осуществления размещение внутри интерьера транспортного средства 800 может не ограничиваться тем, что показано на фиг. 8. Например, интерьер 800 транспортного средства может быть также снабжен другими целевыми объектами, такими как солнечный люк, нагреватель автомобильного кресла и т.д. В некоторых конкретных вариантах осуществления крыша интерьера 800 транспортного средства может быть снабжена солнечным люком и пользователь может через систему 100 управлять солнечным люком. Например, по рулевому колесу 820 можно постучать четыре раза с равными временными интервалами или с подобными временными интервалами в пределах 1 с, чтобы управлять солнечным люком, который будет закрываться или открываться.
Во время управления транспортным средством пользователь (такой как водитель) может регулировать встроенный кондиционер и встроенный динамик. Манипуляции кнопками, переключателями и т.д. на транспортном средстве могут отвлекать внимание водителя и привести к несчастному случаю при дорожном движении. Хотя речевое взаимодействие может в некоторой степени помочь избежать вышеупомянутых проблем, шум колес, музыка и диалог могут оказать большое влияние на речевое взаимодействие. По сравнению со способом управления посредством речевого взаимодействия, при установке датчика вибрации в определенном месте в транспортном средстве (например, на рулевом колесе 820) водитель может управлять целевыми объектами, такими как встроенный кондиционер, встроенный динамик, солнечный люк и т.д. стуча, постукивая или скребя в области приема вибрации, не отводя взгляд от дороги перед транспортным средством, что может повысить уровень безопасности управления транспортным средством.
На фиг. 10 представлено компьютерное рабочее место, снабженное оконечным устройством, соответствующее некоторым вариантам осуществления настоящего раскрытия. Компьютерное рабочее место 1000 может содержать одно или более оконечных устройств. Оконечное устройство может быть одним или более видами офисных и развлекательных устройств.
В некоторых примерных сценариях применения компьютерное рабочее место 1000 может содержать стол 1010 и стул 1020. Стол 1010 и/или стул 1020 могут быть снабжены блоками датчиков (например, первый датчик вибрации, обеспечиваемый на столе 1010, и второй датчик вибрации, обеспечиваемый на стуле 1020). Например, первый датчик вибрации может быть расположен на поверхности стола 1010, а второй датчик вибрации может быть расположен на подлокотнике стула 1020. В некоторых вариантах осуществления пользователь может выполнять определенные действия в области приема вибрации (например, любое место на поверхности таблицы 1010 и/или на подлокотнике стула 1020), и вводить определенный сигнал вибрации на датчик вибрации, чтобы определить действие или рабочую команду для одного или более офисных и развлекательных устройств. Например, если измеряемый сигнал вибрации, соответствующий удару пользователя по крышке стола 1010 одним пальцем, соответствует заданному состоянию признака, соответствующее развлекательное устройство (например, музыкальный инструмент) может сочинить песню, соответствующую ритму удара пальца пользователя, и воспроизвести ее через внешнее устройство аудиовыхода, что может помочь пользователю эффективно снять напряжение. Как другой пример, измеряемый сигнал вибрации, соответствующий постукиванию пользователя по подлокотнику стула 1020, может соответствовать заданному состоянию признака и сопутствующее устройство массажа может массировать спину пользователя.
В некоторых вариантах осуществления расположение компьютерного рабочего места 1000 не может быть ограничиваться только показанным на фиг. 10. Например, компьютерное рабочее место 1000 может также содержать другие оконечные устройства, такие как игрушка, на которую может нажимать пользователь. В некоторых конкретных вариантах осуществления игрушка может содержать датчик вибрации. Когда пользователь нажимает игрушку, датчик вибрации может собирать сигнал вибрация и формировать осязательную обратную связь. Например, нажатие игрушки три раза в пределах 1 с может управлять игрушкой, чтобы она непрерывно колебалась и массировала руку.
В некоторых вариантах осуществления система 100 может также применяться к другим сценариям использования. Например, смарт-фабрика, смарт-аудиоустройство. В некоторых примерных сценариях применения смарт-фабрика может содержать конвейерное устройство сборочной линии, роботизированную руку и блок датчиков (например, датчик вибрации), установленные в общей зоне. При нормальных обстоятельствах фабричная среда является относительно шумной или даже заполненной шумами высокого уровня. По сравнению с речевым взаимодействием, пользователь может вводить сигналы вибрации, выполняя определенные действия, такие как удар, постукивание, скобление и т.д. в области, которая удобна для работы с управляющим устройствам, таким как конвейерное устройство сборочной линии, роботизированная рука, или для ненарушаемой шумом связи с коллегами, что может быть удобным и простым для управления устройствами или связи. Например, пользователь может стучать в одном том же временном интервале с близкими временными интервалами в пределах 3 с. Рабочая команда, соответствующая сформированному сигналу вибрации, может управлять конвейерным устройством сборочной линии, чтобы начать действовать. В некоторых вариантах осуществления датчик вибрации может быть расположен в области, удаленной от роботизированной руки и конвейерного устройства сборочной линии, чтобы не допускать вредной помехи на введенный пользователем сигнал вибрации, формируемый работой роботизированной руки и конвейерного устройства сборочной линии передачи конвейера.
В некоторых примерных сценариях применения система 100 может примяться к смарт-аудиоустройству (например, смарт-динамику). Например, смарт-динамик может содержать установленный на нем датчик вибрации (например, приклеенный). Сам смарт-динамик может осуществлять связь с датчиком вибрации (например, посредством соединения Bluetooth) в качестве оконечного устройства. В некоторых вариантах осуществления пользователь может управлять смарт-динамиком, выполняя определенную работу, такую как удар, постукивание, скобление и т.д. на смарт-динамике. Например, пользователь может постукивать по корпусу смарт-динамика ладонью. Датчик вибрации может собирать сигнал вибрации, формируемый постукиванием ладонью, и формировать измеряемый сигнал. Система 100 может идентифицировать признак сигнала и затем сравнивать признак сигнала с заданным состоянием признака. На основе результата сравнения, действие или рабочая команда, соответствующие измеряемому сигналу, могут быть определены для воспроизведения следующей песни. Режимом взаимодействия смарт-динамика может быть, главным образом, речевое взаимодействие и отсутствие осязательной информации может снижать удобство использования для взаимодействия с пользователем. Располагая датчик вибрации на корпусе смарт-динамика, может быть установлено осязательное взаимодействие между пользователем и смарт-динамиком, чтобы улучшить удобство использования для взаимодействия с пользователем.
В некоторых вариантах осуществления система 100 управления целевым объектом может также контролировать и анализировать движение тела пользователя (такое как кашель, чихание, храп, зевота, падение и т.д.), чтобы точно определить физиологическое состояние пользователя. Например, система 100 может точно и эффективно собирать сигнал движения тела пользователя через датчик 110 и формировать соответствующий измеряемый сигнал, соответствующий сигналу. Система 100 может идентифицировать признак сигнала для измеряемого сигнала. Основываясь на признаке сигнала, можно определить физиологическое состояние пользователя и по физиологическому состоянию пользователя его состояние здоровья может быть определено более точно. Датчик 110 может быть датчиком вибрации. В некоторых вариантах осуществления датчик 110 может также содержать измеритель частоты пульса, измеритель глюкозы крови, измеритель кровяного давления, измеритель липидов крови и т.д. В некоторых вариантах осуществления система 100 может определить действие или рабочую команду для целевого объекта (например, оконечного устройства 130), основываясь на физиологическом состоянии пользователя. Рабочая команда может быть выполнена с возможностью управления целевым объектом, чтобы выполнить соответствующую функцию и, таким образом, предоставить пользователю всестороннюю защиту здоровья. Примерная функция может содержать запись состояния здоровья, выдачу предупреждения, выдачу запроса помощи и т.п.
На фиг. 11 представлена блок-схема последовательности выполнения операций примерного процесса управления целевым объектом в соответствии с некоторыми вариантами осуществления настоящего раскрытия. Конкретно, способ 1100 управления целевым объектом может выполняться системой 100 управления целевым объектом (например, устройством 120 обработки). Например, способ 1100 управления целевым объектом может храниться в устройстве хранения (таком как автономное запоминающее устройство устройства 120 обработки или устройство 140 хранения) в форме программы или команд. Когда способ 1100 управления целевым объектом реализуется, то тогда система 100 управления целевым объектом (например, устройство 120 обработки) выполняет программу или команду. Действие процесса ниже представлено просто с целью иллюстрации. В некоторых вариантах осуществления процесс 1100 может быть выполнен с одной или более дополнительными операциями, не описанными здесь, и/или без одной или более обсужденных операций. Кроме того, порядок операций процесса 1100, представленного на фиг. 11 и описанного ниже, не является ограничивающим. В некоторых вариантах осуществления процесс 1100 может быть применен в области контроля здоровья человека.
На этапе 1110 устройство 120 обработки может получать измеряемый сигнал по меньшей мере от одного датчика. В некоторых вариантах осуществления действие 1110 может быть выполнено модулем 310 приема измеряемого сигнала.
По меньшей мере один датчик может содержать датчик вибрации. Датчик вибрации может собирать сигнал вибрации. Например, датчик вибрации может быть микрофоном, акселерометром и т.д. с костной проводимостью в качестве одного из основных способов передачи звука. В некоторых вариантах осуществления датчик вибрации может быть установлен на носимое устройство. Примерным носимым устройством может быть смарт-браслет, смарт-обувь, смарт-очки, смарт-шлем, смарт-часы, смарт-одежда, смарт-рюкзак, смарт-аксессуар и т.п. или любое их сочетание. Когда пользователь носит на себе носимое устройство, носимое устройство может прикрепляться к части тела пользователя (например, к голове, шее, уху и т.д.). Датчик вибрации может принимать сигнал вибрации, сформированный движением тела пользователя, через носимое устройство. В некоторых вариантах осуществления датчик вибрации может быть независимым устройством. Датчик вибрации может напрямую прикрепляться к части тела пользователя и принимать сигнал вибрации, сформированный движением тела пользователя.
Датчик вибрации может прямо или косвенно контактировать с областью тела пользователя через носимое устройство. Движение тела пользователя, такое как при кашле, чихании, храпе, зевоте, дрожи, столкновении, падении и т.д., может формировать сигнал вибрации. Сигнал вибрации может передаваться датчику вибрации через кость или мышцу пользователя. Датчик вибрации может получить сигнал вибрации и формировать измеряемый сигнал. Датчик вибрации может соединяться с устройством 120 обработки. Устройство 120 обработки может получать измеряемый сигнал, сформированный датчиком вибрации.
На этапе 1120 устройство 120 обработки может идентифицировать признак сигнала для измеряемого сигнала. В некоторых вариантах осуществления действие на этапе 1120 может выполняться модулем 320 идентификации признака сигнала. В некоторых вариантах осуществления этап 1120 может быть таким же или подобным этапу 420 в процессе 400.
В некоторых вариантах осуществления устройство 120 обработки может обрабатывать измеряемый сигнал вибрации (например, во временной области обработки и/или в частотной области обработки и т.д.) и выводить измеряемый сигнал вибрации в виде спектра признака сигнала. Основываясь на спектре признака сигнала, устройство 120 обработки может идентифицировать признак сигнала для измеряемого сигнала. Например, устройство 120 обработки может считывать соответствующую информацию, такую как количество пиков вибрации, частотные составляющие сигнала и т.д., из спектра признака сигнала. В некоторых вариантах осуществления устройство 120 обработки может также напрямую идентифицировать признак сигнала, основываясь на соответствующих данных/информации сигнала вибрации, полученного датчиком вибрации. Например, устройство 120 обработки может вычислять временной интервал между двумя соседними пиками вибрации соответственно времени, в котором получают два пика вибрации.
В некоторых вариантах осуществления устройство 120 обработки может идентифицировать по меньшей мере одну признак сигнала для измеряемого сигнала, такой как количество пиков вибрации, мощность сигнала, временной интервал между двумя соседними пиками вибрации, частотные составляющие, длительность сигнала или любое их сочетание. Различные движения тела пользователя, такие как при кашле, чихании, храпе, зевоте, дрожи, столкновении, падении, могут формировать различные сигналы вибрации (например, сигналы вибрации с различными частотными составляющими, временными интервалами между двумя соседними пиками вибрации, длительностями и/или мощностями сигнала). Соответственно, измеряемый сигнал вибрации, сформированный датчиком вибрации, может также отличаться (например, измеряемые сигналы вибрации с различными частотными составляющими, временными интервалами между двумя соседними пиками вибрации, длительностями и/или мощностями сигнала). Например, когда пользователь чихает, в спектре признака сигнала может быть много высокочастотных сигнальных компонентов и длительность пика вибрации может быть относительно длинной. Когда пользователь зевает, спектр признака сигнала может иметь много высокочастотных сигнальных компонентов и обычно никакой явный пик вибрации не может быть сформирован. Дополнительное описание признака сигнала для измеряемого сигнала, соответствующего различным движениям тела, можно найти в другом месте в настоящем раскрытии, например, на фиг. 12A-12E, который здесь не описываются.
На этапе 1130 устройство 120 обработки, основываясь на признаке сигнала, может определить физиологическое состояние пользователя. В некоторых вариантах осуществления этап 1130 может быть выполнен модулем 330 определения действия.
Физиологическое состояние здесь может относиться к состоянию, в котором находится тело пользователя. Каждому движению тела пользователя может быть присуще соответствующее физиологическое состояние. Физиологическое состояние пользователя может быть опасным физиологическим состоянием или неопасным физиологическим состоянием. Неопасное физиологическое состояние может содержать состояние кашля, состояние чихания, состояние храпа, состояние зевоты и т.д. Опасное физиологическое состояние может содержать состояние озноба, состояние столкновения, состояние падения и т.д. Устройство 120 обработки может определить признак сигнала, анализируя и обрабатывая измеряемый сигнал, сформированный датчиком вибрации, и затем определить физиологическое состояние пользователя, основываясь на признаке сигнала.
В некоторых вариантах осуществления устройство 120 обработки может определить, соответствует ли идентифицированный признак сигнала по меньшей мере одному из множества заданных состояний признака. Заданное состояние признака может содержать один заданный признак, множество заданных признаков или любое их сочетание. В некоторых вариантах осуществления устройство 120 обработки может использовать признак сигнала, соответствующий физиологическому состоянию, в качестве заданного состояния признака. В некоторых вариантах осуществления каждое заданное состояние признака может соответствовать физиологическому состоянию пользователя. Например, заданное состояние признака может состоять в том, что два или более пиков вибрации с малыми временными интервалами появляются в пределах порогового времени (например, 5 с, 8 с, 10 с, 15 с и т.д.). Как другой пример, заданное состояние признака может состоять в том, что в спектре признака сигнала присутствует много высокочастотных сигнальных компонентов и нет никакого явного пика вибрации. Как другой пример, заданное состояние признака может состоять в том, что в спектре признака сигнала присутствует много низкочастотных сигнальных компонентов. Каждое заданное состояние признака может соответствовать различным физиологическим состояниям. Например, заданное состояние признака может состоять в том, что физиологическое состояние, соответствующее двум или более пикам вибрации с малыми временными интервалами в пределах 10 с, является состоянием кашля. Как другой пример, физиологическое состояние, соответствующее заданному состоянию признака, может состоять в том, что в спектре признака высокочастотные сигнальные компоненты составляют 60% и нет никакого явного пика вибрации и это может являться состоянием зевоты. Как другой пример, физиологическое состояние, соответствующее заданному состоянию признака, при котором низкочастотные сигнальные компоненты в спектре признака сигнала составляют 70%, может быть состоянием падения.
В некоторых вариантах осуществления заданное состояние признака, соответствующее каждому физиологическому состоянию, может быть определено, основываясь на признаке сигнала для измеряемого сигнала, сформированного фактическими движениями тел множества пользователей. Например, заданное состояние признака, соответствующее состоянию зевоты, может быть определено, извлекая признак сигнала для измеряемого сигнала вибрации, сформированного датчиком вибрации, когда множество пользователей зевают. В некоторых вариантах осуществления устройство 120 обработки может использовать заданное состояние признака, чтобы определить модель, и определить заданный признак каждого физиологического состояния, основываясь на извлеченном признаке сигнала. Заданная модель определения состояние признака может быть, например, моделью машинного обучения. В некоторых вариантах осуществления заданная модель определения состояния признака может быть обучаемой моделью машинного обучения. Процесс обучения заданной модели определения состояния признака может быть таким же или подобным процессу обучения модели извлечения признака.
В некоторых вариантах осуществления устройство 120 обработки может определить, соответствует ли признак сигнала заданному состоянию признака, основываясь на разности между признаком сигнала для измеряемого сигнала и заданным состоянием признака. Например, заданное состояние признака может содержать три или более пиков вибрации, появляющихся в пределах 5 с. Устройство 120 обработки может определить количество пиков вибрации, которые появляются в собранном измеряемом сигнале в пределах 5 с. Если присутствуют только два пика вибрации, заданное состояние признака не соответствует. В некоторых вариантах осуществления устройство 120 обработки может определить, соответствует ли признак сигнала заданному состоянию признака, основываясь на спектре признака сигнала для измеряемого сигнала и спектре признака функции для заданного состояния признака. Например, устройство 120 обработки может сравнить спектр признака сигнала для измеряемого сигнала со спектром признака сигнала для заданного состояния признака. Если сигнальные кривые в двух спектрах признаков сигналов совпадают или подобны, можно решить, что признак сигнала соответствует заданному состоянию признака. В некоторых вариантах осуществления устройство 120 обработки может также определить, соответствует ли признак сигнала заданному состоянию признака, основываясь на модели заданной идентификации состояния признака. Когда признак сигнала соответствует заданному состоянию признака, устройство 120 обработки может определить физиологическое состояние, соответствующее заданному состоянию признака, как физиологическое состояние пользователя.
На этапе 1140 устройство 120 обработки на основе физиологического состояния пользователя может определить действие целевого объекта по меньшей мере с помощью одного датчика 110. В некоторых вариантах осуществления этап 1140 может быть выполнен модулем 330 определения действия. В некоторых вариантах осуществления устройство 120 обработки может дополнительно определить рабочую команду, выполненную с возможностью управления целевым объектом, чтобы выполнить операцию. Рабочая команда может подать целевому объекту (например, носимому смарт-устройству, оконечному устройству 130 и т.д.) команду выполнить операцию.
В некоторых вариантах осуществления устройство 120 обработки может определить операцию целевого объекта в соответствии с тем, является ли физиологическое состояние опасным. В некоторых вариантах осуществления, когда физиологическое состояние является опасным физиологическим состоянием, например, когда пользователь упал, устройство 120 обработки может управлять операциями оконечного устройства 130 (например, мобильного терминала), такими как подача аудиозапроса (например, «Вы в опасности?», «Вы нуждаетесь в помощи?»), выдача предупреждения (например, выдача предупреждения заранее сохраненному контакту через мобильный терминал (такой как мобильный телефон), запрос внешней помощи (например, посылка запроса о помощи публичному органу безопасности и больнице), или любое их сочетание. В некоторых вариантах осуществления, когда физиологическое состояние является неопасным физиологическим состоянием, например, когда пользователь зевает, устройство 120 обработки может зарегистрировать соответствующую информацию измеряемого сигнала. Соответствующая информация измеряемого сигнала может содержать частоту измеряемого сигнала (выполнен с возможностью отражения частоты движения тела), признак сигнала для измеряемого сигнала (выполнен с возможностью отражения типа движения тела), время, когда появляется измеряемый сигнал (выполнено с возможностью отражения определенный момент времени или период времени движения тела) и т.п. В некоторых вариантах осуществления устройство 120 обработки может оценивать состояние здоровья пользователя в соответствии с зарегистрированным признаком сигнала. Например, когда частота храпа превышает частотный порог, устройство 120 обработки может решить, что у пользователя возможна болезнь горла. Когда частота сопения или чихания пользователя превышает частотный порог, устройство 120 обработки может решить, что пользователь мог простудиться. В некоторых вариантах осуществления устройство 120 обработки может сообщить состояние здоровья и/или послать оценку состояния здоровья пользователя оконечному устройству 130 (например, мобильному телефону) для просмотра пользователем.
В некоторых вариантах осуществления устройство 120 обработки может определить операцию целевого объекта в сочетании с соответствующей информацией пользователя. Соответствующая информация пользователя может содержать историю болезни, возраст и различные физиологические параметры (например, кровяное давление, глюкоза крови, частота пульса и т.д.) пользователя. В некоторых вариантах осуществления соответствующая информация пользователя может вводиться пользователем через оконечное устройство 130 (например, через мобильный терминал, осуществляющий связь с устройством 120 обработки). В некоторых вариантах осуществления по меньшей мере один датчик может также содержать измеритель частоты пульса, измеритель кровяного давления, измеритель глюкозы крови и т.п. или любое их сочетание. Различные физиологические параметры пользователя (например, кровяное давление, глюкоза крови, частота пульса и т.д.) могут быть получены по меньшей мере через один датчик. Например, когда устройство 120 обработки определяет, что физиологическое состояние пользователя является состоянием падения, возраст пользователя может быть получен, например, если возраст пользователя 80 лет, устройство 120 обработки может напрямую управлять оконечным устройством 130 (например, мобильным терминалом), чтобы выдать предупреждение. Как другой пример, когда возраст пользователя 20 лет, устройство 120 обработки может управлять оконечным устройством 130 (например, мобильным терминалом), чтобы выдать аудиозапрос. В некоторых случаях, по сравнению с молодыми людьми, здоровье пожилых людей и людей средних лет может быть более чувствительным к падению, поэтому может оказаться необходимым вовремя выдать предупреждение членам семьи и друзьям, чтобы обеспечить помощь пользователю.
На фиг. 12A-12E схематично представлены спектры признаков сигналов вибрации для измеряемых сигналов, соответствующих различным движениям тела, согласно некоторым вариантам осуществления настоящего раскрытия. На фиг. 12A-12E в качестве примеров показаны спектры признаков сигналов для измеряемых сигналов вибрации, сформированных пользователем, при кашле, зевоте, чихании, храпе и падении, соответственно. На фиг. 12А-12Е можно видеть, что измеряемые сигналы вибрации, вызванные различными движениями тела, имеют различные признаки сигнала. Как показано на фиг. 12A, когда пользователь кашляет, он может обычно продолжать кашлять несколько раз и, таким образом, может появиться множество пиков вибрации с малыми интервалами. Как показано на фиг. 12B, когда пользователь зевает, спектр признака сигнала может иметь много высокочастотных сигнальных компонентов и обычно никакой явный пик вибрации не формируется. Как показано на фиг. 12C, когда пользователь чихает, в спектре признака сигнала может иметься много высокочастотных сигнальных компонентов и длительность пика вибрации может быть относительно длинной. Как показано на фиг. 12D, когда пользователь делает вызов, высокочастотные сигнальные компоненты в спектре признака сигнала могут увеличиться и сконцентрироваться. Как показано на фиг. 12E, когда пользователь падает, в спектре признака сигнала может иметься больше низкочастотных сигнальных компонент.
На фиг. 13 представлена частотная характеристика измеряемого сигнала вибрации для движений тела пользователя в соответствии с некоторыми вариантами осуществления настоящего раскрытия. Как показано на фиг. 13, в некоторых вариантах осуществления частота сигнала вибрации, сформированного движением тела пользователя (например, кашель, чихание и т.д.), может быть существенно ниже 5 кГц (частота f1 может равняться 5 кГц). Поэтому необходимо, чтобы резонансная частота (то есть, собственная частота) датчика вибрации была меньше 5 кГц. В некоторых вариантах осуществления собственная частота датчика вибрации может составлять 0,5 кГц – 5 кГц. В некоторых вариантах осуществления собственная частота датчика вибрации может составлять 0,8 кГц – 5 кГц. В некоторых вариантах осуществления собственная частота датчика вибрации может составлять 1 кГц – 5 кГц. В некоторых вариантах осуществления собственная частота датчика вибрации может составлять 1,25 кГц – 4,75 кГц. В некоторых вариантах осуществления собственная частота датчика вибрации может составлять 1,5 кГц – 4,5 кГц. В некоторых вариантах осуществления собственная частота датчика вибрации может составлять 2 кГц – 4,5 кГц. Необходимо, чтобы чувствительность датчика вибрации была настолько высокой, насколько возможно, чтобы сделать измеряемый сигнал вибрации более точным. В некоторых вариантах осуществления чувствительность датчика вибрации может быть (-50) дБВ/(м/с2) – (-10) дБВ/(м/с2). В некоторых вариантах осуществления чувствительность датчика вибрации может быть (-35) дБВ/(м/с2) – (-15) дБВ/(м/с2). В некоторых вариантах осуществления чувствительность датчика вибрации может быть (-30) дБВ/(м/с2) – (-15) дБВ/(м/с2). В некоторых вариантах осуществления чувствительность датчика вибрации может быть (-25) дБВ/(м/с2) – (-20) дБВ/(м/с2).
На фиг. 14 схематично представлена система управления целевым объектом, применяемая к носимому устройству, соответствующая некоторым вариантам осуществления настоящего раскрытия. Например, носимое устройство может быть гарнитурой 1400. Один или более компонентов или блоков системы 100 управления целевым объектом могут быть интегрированы в гарнитуру 1400.
В некоторых вариантах осуществления гарнитура у 1400 может обладать только функцией аудиовыхода, например, гарнитура, 1400 может быть динамиком. В некоторых вариантах осуществления гарнитура 1400 может иметь функцию аудиовыхода и аудиоввода, так чтобы она могла вводить и выводить аудиосигнал. В некоторых вариантах осуществления гарнитура 1400 может быть слуховым аппаратом. В некоторых вариантах осуществления гарнитура 1400 может быть гарнитурой, в которой костная проводимость или воздушная проводимость является одним из основных способов передачи звука. В некоторых вариантах осуществления гарнитура 1400 может быть гарнитурой (например, монофонической гарнитурой, бинауральной гарнитурой), супраауральной гарнитурой, внутриушной гарнитурой и т.д.
В некоторых вариантах осуществления гарнитура 1400 может быть внутриушной гарнитурой. Датчик 1410 может быть расположен на гарнитуре 1400. Датчик 1410 может быть датчиком вибрации, выполненным с возможностью сбора сигнал вибрации, формируемого движением тела пользователя. В некоторых вариантах осуществления датчик вибрации может быть микрофоном, в котором костная проводимость, образованная в гарнитуре, является одним из основных способов передачи звука. В некоторых вариантах осуществления датчик вибрации может быть измерителем ускорения микроэлектромеханической системы (micro-electro-mechanical system, MEMS). Датчик 1410 вибрации может принимать через гарнитуру 1400 сигнал вибрации, сформированный движением тела пользователя. Когда пользователь носит на себе гарнитуру 1400, гарнитура 1400 может прикрепляться к части тела пользователя (например, к уху) и сигнал вибрации может точно передаваться гарнитурой 1400 датчику вибрации. В некоторых вариантах осуществления, улучшая жесткость соединения между датчиком вибрации и гарнитурой 1400, можно уменьшить потери сигнала вибрации во время передачи, так чтобы сигнал вибрации мог более точно и полностью собираться датчиком вибрации. В некоторых вариантах осуществления датчик вибрации может жестко соединяться с корпусом, где пользователь контактирует с гарнитурой 1400. Поскольку корпус обычно обладает определенной жесткостью, потеря сигнала вибрации во время передачи может быть уменьшена. Средства фиксированного соединения могут содержать, но не ограничиваясь только этим, штамповку, винтовое соединение, клепку, сварку, склеивание и т.д. В некоторых вариантах осуществления датчик вибрации может соединяться с гарнитурой 1400 посредством склеивания, чтобы облегчить демонтаж датчика вибрации.
В некоторых вариантах осуществления датчик вибрации может напрямую крепиться к части тела (например, к уху) пользователя. Например, когда пользователь носит на себе гарнитуру 1400, датчик вибрации может быть расположен на корпусе гарнитуры 1400 и напрямую контактировать с ухом пользователя. Сигнал вибрации, сформированный движением тела пользователя, может напрямую собираться датчиком вибрации без передачи через одну или более частей гарнитуры 1400 (например, корпус), уменьшая, таким образом, потери сигнала вибрации во время передачи.
В некоторых вариантах осуществления, чтобы гарантировать, что носимое устройство (например, смарт-гарнитура, смарт-очки, смарт-шлем и т.д.) имеет разумный общий размер, могут существовать определенные требования к объему датчика вибрации. В некоторых вариантах осуществления объем датчика вибрации может быть между 1 мм3 и 10 см3. В некоторых вариантах осуществления объем датчика вибрации может быть между 0,5 мм3 и 20 см3. В некоторых вариантах осуществления объем датчика вибрации может быть между 1,5 мм3 и 5 см3. В некоторых вариантах осуществления объем датчика вибрации может быть между 2 мм3 и 1 см3.
На фиг. 15 представлена блок-схема последовательности выполнения операций примерного процесса определения целевого объекта, основываясь на сигнале вибрации, сформированном движениями тела пользователя, соответствующего некоторым вариантам осуществления настоящего раскрытия. В этом варианте осуществления сигнал вибрации, сформированный движениями тела пользователя, носящего гарнитуру 1400, может передаваться датчику вибрации, жестко соединенному с гарнитурой 1400. Датчик вибрации после приема сигнала вибрации может формировать соответствующий измеряемый сигнал вибрации. Устройство 120 обработки может получать измеряемый сигнал, формируемый датчиком вибрации, и идентифицировать признак сигнала в измеряемом сигнале. В некоторых вариантах осуществления устройство 120 обработки может определить, соответствует ли признак сигнала по меньшей мере одному из множества заданных состояний признака. Например, заданное состояние признака может быть признаком сигнала, соответствующего состоянию кашля, зевоты, чихания, состоянию сопения, храпа, падения и т.п. или любому их сочетанию. В некоторых вариантах осуществления, если признак сигнала для измеряемого сигнала не соответствует ни одному из заданных состояний признака, устройство 120 обработки не может выполнять операцию. В некоторых вариантах осуществления, если признак сигнала для измеряемого сигнала соответствует одному из заданных состояний признака, устройство 120 обработки может определить физиологическое состояние, соответствующее заданному состоянию признака. Устройство 120 обработки может дополнительно определить, является ли физиологическое состояние, соответствующее заданному состоянию признака, опасным физиологическим состоянием, таким как состояние падения или состояние столкновения. В некоторых вариантах осуществления, когда физиологическое состояние является состоянием падения, устройство 120 обработки может определить действие целевого объекта, соответствующее опасному физиологическому состоянию. Например, целевой объект может содержать гарнитуру 1400 и другие устройства, которые осуществляют связь с гарнитурой 1400. Например, другими устройствами, которые осуществляют связь с гарнитурой 1400, могут быть мобильный терминал, такой как мобильный телефон. В некоторых вариантах осуществления устройство 120 обработки может выдавать гарнитуре 1400 рабочие команды, так чтобы гарнитура 1400 могла выдавать пользователю аудиозапрос: «Вы в опасности?», «Вы нуждаетесь в помощи?» Пользователь может ответить на аудиозапрос, чтобы заставить устройство 120 обработки перейти к действиям. Например, пользователь может ответить на аудиозапрос (например, у гарнитуры может иметь функцию речевого ввода): «Нуждаюсь в спасении”, устройство 120 обработки может управлять мобильным терминалом, чтобы передать предупреждение по заданному хранящемуся контактному телефону или запросить внешнюю помощь. В некоторых вариантах осуществления, если устройство 120 обработки не обнаруживает пользовательский ответ в пределах определенного периода времени (например, 10-ые, 20-ые, 30-ые, и т.д.), устройство 120 обработки может выпустить предупреждение предварительно сохраненному контакту, или запросить внешнюю помощь. В некоторых вариантах осуществления, когда физиологическое состояние является неопасным физиологическим состоянием (например, состоянием кашля, зевоты и т.д.), устройство 120 обработки может записать соответствующую информацию измеряемого сигнала, чтобы облегчить последующую оценку состояния здоровья пользователя.
На фиг. 16 представлена система управления целевым объектом, применяемая к носимому устройству в соответствии с некоторыми вариантами осуществления настоящего раскрытия. Например, носимое устройство может содержать гарнитуру 1600 (например, супраауральную гарнитуру). Один или более компонентов или блоков системы 100 управления целевым объектом могут быть интегрированы в гарнитуру 1600 или средствами связи соединяться с гарнитурой 1600.
В некоторых примерных сценариях применения датчик 1610 может быть расположен на гарнитуре 1600. Датчик 1610 может содержать датчик вибрации, выполненный с возможностью сбора сигнала вибрации, сформированного движениями тела пользователя гарнитуры 1600 (например, удар при падении). Примерное устройство 1610 датчика вибрации может быть MEM-измерителем ускорения, микрофоном, в котором костная проводимость является одним из основных способов передачи звука, и т.д. В некоторых вариантах осуществления микрофон, в котором костная проводимость является одним из основных способов передачи звука, может быть элементом гарнитуры 1600. Например, гарнитура 1600 может быть гарнитурой, содержащей микрофон, в котором костная проводимость является одним из основных способов передачи звука. В некоторых вариантах осуществления устройство 120 обработки (например, блок обработки сигнала гарнитуры 1600), может определить физиологическое состояние пользователя, основываясь на сигнале обнаружения вибрации, сформированном датчиком 1610. В некоторых вариантах осуществления устройство 120 обработки может определять действие целевого объекта, основываясь на физиологическом состоянии пользователя. Целевым объектом может считаться оконечное устройство 130 в системе 100. В некоторых вариантах осуществления целевой объект может содержать гарнитуру 1600 и оконечное смарт-устройство, которое осуществляет связь с гарнитурой 1600. Примерное оконечное смарт-устройство может содержать мобильный телефон, планшетный компьютер, браслет и т.д.
В других примерных сценариях применения датчик 1610 может содержать датчик вибрации и датчик движения. Датчик движения может собирать сигнал движения, связанный с положением тела пользователя. Примерный датчик движения может содержать, но не ограничиваясь только этим, трехосный гироскоп, трехосный измеритель ускорения, трехосный электронный компас и т.д. Беря в качестве примера трехосный гироскоп, такой гироскоп может собирать информацию, связанную с углом положения гарнитуры 1600 (например, с угловой скоростью по трем ортогональным осям), и формировать соответствующий измеряемый сигнал. Угол положения может содержать угол рыскания (то есть, угол между гарнитурой 1600 и горизонтальной плоскостью), угол тангажа и угол крена. Устройство 120 обработки может обрабатывать измеряемый сигнал для определения признака этого сигнала. Основываясь на признаке сигнала, устройство 120 обработки может определять положение тела пользователя. Положение тела может содержать, например, стационарное состояние, такое как когда человек лежит на животе, лежит на спине, лежит, согнувшись под углом, и т.д., или состояние движения, такое как медленный подъем и т.п. В некоторых вариантах осуществления процессор трехосного гироскопа (например, микросхема) может также определять положение тела пользователя, основываясь на измеряемом сигнале. В некоторых вариантах осуществления устройство 120 обработки может определить заданное состояние признака, основываясь на соответствующих признаках сигнала для множества положений тела пользователя, когда он находится в стационарном состоянии (например, лежит на животе, лежит на спине, лежит, согнувшись под углом) и в состоянии движения (например, медленно встает). можно определить, соответствует ли признак сигнала для измеряемого сигнала заданному состоянию признака, чтобы определить положение тела пользователя. Например, когда признак сигнала для измеряемого сигнала соответствует заданному состоянию признака, согласно которому положение тела является стационарным (такое как положение лежа на животе), может быть принято решение, что положение тела пользователя является стационарным (то есть, он лежит на животе).
В некоторых вариантах осуществления устройство 120 обработки может определить, находится ли пользователь в состоянии падения, основываясь на признаке сигнала для измеряемого сигнала, сформированного датчиком вибрации. Устройство 120 обработки может определить положение тела пользователя, основываясь на признаке сигнала для измеряемого сигнала, сформированного датчиком движения. В сочетании с измеряемым сигналом, формируемым датчиком вибрации и датчиком движения, можно определить, упал ли пользователь и положение тела пользователя. В некоторых вариантах осуществления устройство 120 обработки может определить физиологическое состояние пользователя, основываясь на определении, упал ли пользователь, и положении тела пользователя. Например, физиологическое состояние пользователя может быть разделено как опасное состояние и неопасное состояние. Когда пользователь упал и положение тела пользователя является стационарным (например, лежит на спине) в пределах определенного порогового времени (например, 10 секунд, 20 секунд, 30 секунд, 1 минута, и т.д.), может быть решено, что пользователь находится в опасном состоянии и нуждается в помощи. Как другой пример, когда пользователь не упал или пользователь упал, но положение тела находится в состоянии движения (например, медленно встает), может быть решено, что пользователь находится в неопасном состоянии и не нуждается в помощи.
В некоторых вариантах осуществления устройство 120 обработки может определить операцию целевого объекта, основываясь на физиологическом состоянии пользователя. Например, когда устройство 120 обработки решает, что пользователь упал и положение тела пользователя является стационарным (например, лежит на боку) в пределах порогового времени, можно решить, что пользователь находится в опасном состоянии и можно решить, чтобы мобильный терминал (например, мобильный телефон), который средствами связи соединяется с гарнитурой 1600, выдал предупреждение или запросил внешнюю помощь по заданному хранящемуся контактному телефону. Как другой пример, когда устройство 120 обработки решает, что пользователь не упал или пользователь упал, но положение тела пользователя находится в состоянии движения (таком как медленное вставание, медленное усаживание и т.д.), может быть решено, что пользователь находится в опасном состоянии и принять решение, чтобы мобильный терминал, средствами связи соединенный с гарнитурой 1600, записал соответствующую информацию измеряемого сигнала, чтобы облегчить последующую оценку состояния здоровья пользователя.
В некоторых вариантах осуществления гарнитура 1600 может дополнительно содержать датчик физиологических параметров. Примерный датчик физиологических параметров может содержать измеритель частоты пульса, измеритель кровяного давления, измеритель глюкозы крови и т.д. Датчик физиологических параметров может быть выполнен с возможностью обнаружения или анализа расширения кровеносных сосудов, торакальной активности, состава крови и т.д. пользователя и формирования измеряемого сигнала. Устройство 120 обработки может идентифицировать признак сигнала для измеряемого сигнала и определять по меньшей мере один физиологический параметр пользователя. Примерным физиологическим параметром может быть частота пульса, кровяное давление, глюкоза крови и т.д. Например, датчик физиологических параметров может содержать фотоэлектрический датчик, который получает импульсный сигнал от участка тела пользователя (например, запястья, плеча, головы и т.д.) и определяет кровяное давление пользователя в соответствии с импульсным сигналом, используя устройство 120 обработки. В некоторых вариантах осуществления процессор датчика физиологических параметров (например, микросхема) может также определить физиологический параметр пользователя, основываясь на измеряемом сигнале.
В сочетании с измеряемым сигналом, формируемым датчиком вибрации, датчиком движения и/или датчиком физиологических параметров, устройство 120 обработки может определить, упал ли пользователь, положение тела пользователя и/или по меньшей мере один физиологический параметр. В некоторых вариантах осуществления устройство 120 обработки может определить физиологическое состояние пользователя, основываясь на определении, упал ли пользователь, положении тела пользователя и/или физиологическом параметре. Например, физиологическое состояние пользователя может быть разделено на опасное физиологическое состояние и неопасное физиологическое состояние. Когда пользователь упал и положение тела пользователя является стационарным (например, лежит на спине) в пределах определенного порогового времени (например, 10 секунд, 20 секунд, 30 секунд, 1 минута и т.д.) и физиологический параметр превышает порог (например, частота пульса ниже заданного порога частоты пульса, глюкоза крови ниже заданного порога глюкозы крови, кровяное давление выше заданного порога кровяного давления и т.д.), может быть решено, что пользователь находится в опасном физиологическом состоянии и нуждается в помощи. Частота пульса ниже заданного порога частоты пульса, глюкоза крови ниже заданного порога глюкозы крови и/или кровяное давление выше заданного порога кровяного давления могут быть определены относительно частоты пульса, глюкозы крови и/или кровяного давления нормального человеческого тела. Например, заданный порог частоты пульса может быть 100 ударов/минуту, 120 ударов/минуту, 140 ударов/минуту, 160 ударов/минуту и т.п. В качестве другого примера, когда пользователь не упал или пользователь упал, но положение тела пользователя находится в состоянии движения (например, медленно встает) или каждый физиологический параметр находится в пределах порогового диапазона, может быть решено, что пользователь находится в неопасном физиологическом состоянии и не нуждается в помощи.
По сравнению с определением, основанным просто на единственном условии, что пользователь упал, более точным и эффективным может быть определение физиологического состояния пользователя в сочетании с положением тела и/или физиологическим параметром пользователя, и действие целевого объекта, в конечном счете, может быть определено более точно в соответствии с фактической ситуацией.
На фиг. 17 представлена блок-схема последовательности выполнения операций примерного процесса определения действия целевого объекта, основываясь на сигнале вибрации, формируемом движением тела пользователя. Этот вариант осуществления показывает процесс определения действия целевого объекта, основываясь на датчике вибрации и датчике движения, расположенных на носимом устройстве (например, на гарнитуре 1600). Например, датчик вибрации может быть MEMS-измерителем ускорения (называемым измерителем ускорения). Датчик движения может быть трехосным гироскопом. В этом варианте осуществления, движения тела пользователя, который носит на себе гарнитуру 1600 (например, столкновение, падение и т.д.) формируют сигнал вибрации, который может передаваться MEMS-измерителю ускорения, жестко соединенному с гарнитурой 1600. После того, как MEMS-измеритель ускорения собирает сигнал вибрации, соответствующий измеряемый сигнал может быть сформирован. Одновременно, трехосный гироскоп также может собирать информацию, связанную с углом положения тела пользователя. В некоторых вариантах осуществления устройство 120 обработки (например, блок обработки сигналов гарнитуры 1600) может обрабатывать измеряемый сигнал, сформированный после того, как MEMS-измеритель собирает сигнал вибрации, и идентифицировать признак сигнала в измеряемом сигнале, чтобы определить, упал ли пользователь. Например, устройство 120 обработки может выполнить анализ ускорения, основанный на измеряемом сигнале, чтобы определить, упал ли пользователь. Устройство 120 обработки может обработать измеряемый сигнал, сформированный после того, как трехосный гироскоп собрал сигнал, и идентифицировать признак сигнала в измеряемом сигнале, чтобы определить положение тела пользователя. Например, чтобы определить положение тела пользователя, устройство 120 обработки может выполнить анализ положения тела, основываясь на измеряемом сигнале.
В некоторых вариантах осуществления устройство 120 обработки может определить, выдавать ли предупреждение, в сочетании с определением, упал ли пользователь, и положением тела пользователя. Как упомянуто выше, когда устройство 120 обработки решает, что пользователь упал и положение тела пользователя является стационарным в пределах порогового времени, оно может решить, что пользователь находится в опасном состоянии и может решить, что мобильный терминал (например, мобильный телефон) выдает предупреждение по заранее сохраненному контактному телефону или запрашивает внешнюю помощь.
На фиг. 18 представлена блок-схема примерного процесса определения действия целевого объекта, основываясь на сигнале вибрации, сформированном движением тела пользователя. Этот вариант осуществления показывает процесс определения действия целевого объекта, основываясь на датчике вибрации, датчике движения и датчике физиологических параметром, расположенных на носимом устройстве (например, на гарнитуре 1600). Например, датчик вибрации может быть измерителем ускорения. Датчик движения может быть трехосным гироскопом. Датчик физиологических параметров может быть измерителем частоты пульса. В этом варианте осуществления движения тела пользователя, который носит на себе гарнитуру 1600, (например, столкновение, падение и т.д.) сформированный сигнал вибрации может быть передан к MEMS-измерителю ускорения, жестко соединенному с гарнитурой 1600. После того, как MEMS-измеритель ускорения собирает сигнал вибрации, может быть сформирован соответствующий измеряемый сигнал. Трехосный гироскоп может собирать информацию, связанную с углом положения тела пользователя. Одновременно, измеритель частоты пульса может также собрать информацию/данные, связанные с частотой пульса пользователя. В некоторых вариантах осуществления устройство 120 обработки (например, блок обработки сигналов гарнитуры 1600) может обрабатывать измеряемый сигнал, сформированный после того, как MEMS-измеритель ускорения соберет сигнал вибрации, и идентифицировать признак сигнала в измеряемом сигнале, чтобы определить, упал ли пользователь. Например, устройство 120 обработки может выполнить анализ ускорения, основываясь на измеряемом сигнале, чтобы определить, упал ли пользователь. Устройство 120 обработки может обработать измеряемый сигнал, сформированный после того, как трехосный гироскоп собрал сигнал, и идентифицировать признак сигнала для измеряемого сигнала, чтобы определить положение тела пользователя. Например, устройство 120 обработки может выполнить анализ положения тела, основываясь на измеряемом сигнале, чтобы определить положение тела пользователя. Устройство 120 обработки может обработать измеряемый сигнал, сформированный после того, как измеритель частоты пульса собрал сигнал, и идентифицировать признак сигнала в измеряемом сигнале, чтобы определить частоту пульса пользователя. Например, блок 120 обработки (например, процессор (например, микросхема) измерителя частоты пульса) может выполнить анализ значения частоты пульса, основываясь на измеряемом сигнале, чтобы определить частоту пульса пользователя.
В некоторых вариантах осуществления устройство 120 обработки может определить, выдавать ли предупреждение, основываясь на определении того, упал ли пользователь, положении тела пользователя и частоте пульса пользователя. Например, когда устройство 120 обработки решает, что пользователь упал и положение тела пользователя является стационарным в пределах порогового времени и/или физиологический параметр пользователя превышает заданный порог (например, диастолическое давление превышает заданный порог диастолического давления (такой как 140 мм рт. ст., 160 мм рт. ст., 160 мм рт. ст., 180 мм рт. ст. и т.д.), оно может решить, что пользователь находится в опасном состоянии, и может решить, что мобильный терминал выдает предупреждение по заранее сохраненному контактному телефону или запрашивает внешнюю помощь.
В некоторых случаях, по сравнению с определением состояния пользователя, просто через посредство движений тела можно более точно подтвердить состояние пользователя в сочетании с информацией определения, упал ли пользователь, положение тела пользователя, физиологический параметр пользователя и т.д., и действие целевого объекта, в конечном счете, может больше соответствовать фактической ситуации и может эффективно контролировать состояние здоровья пользователя.
На фиг. 19 представлена система управления целевым объектом, применяемая к носимому устройству в соответствии с некоторыми вариантами осуществления настоящего раскрытия. Датчик 110 в системе 100 управления целевым объектом может содержать датчик вибрации. Датчик вибрации может интегрироваться или располагаться (например, приклеиваться, присоединяться застежкой и т.д.) в носимом устройстве. Датчик вибрации может быть расположен в определенном месте. Определенное место может быть местом, в котором можно относительно полностью и четко принимать сигнал вибрации, сформированный движениями тела пользователя и передаваемый через кости или мышцы пользователя. Примерным конкретным местом может быть переносица, ухо, рот, горло и т.д. пользователя. В некоторых вариантах осуществления место расположения датчика вибрации может быть связано с типом носимого устройства. Например, когда носимым устройством являются очки, датчик вибрации может быть расположен на раме переносицы очков или в месте, где дужка очков входит в контакт с ухом. В качестве другого примера, когда носимым устройством является гарнитура, датчик вибрации может быть расположен на ухе пользователя. В некоторых вариантах осуществления по меньшей мере один датчик вибрации может содержать единственный датчик вибрации, расположенный в определенном месте или множество датчиков вибрации, расположенных в различных местах.
Например, носимое устройство может содержать гарнитуру 1900 (например, внутриушную гарнитуру). Один или более компонентов или блоков системы 100 управления целевым объектом могут быть интегрированы в гарнитуру 1900 или средствами связи соединяться с гарнитурой 1900. Например, датчик 1910 вибрации может быть расположен на гарнитуре 1900. Датчик 1910 вибрации может быть интегрирован или прикреплен (например, приклеен, присоединен застежкой и т.д.) к гарнитуре 1900, чтобы собирать сигнал вибрации, сформированный движением тела пользователя. В некоторых вариантах осуществления датчик вибрации может быть микрофоном, в котором костная проводимость, созданная в гарнитуре, является одним из основных способов передачи звука. В некоторых вариантах осуществления датчик вибрации может быть MEMS-измерителем ускорения. В качестве другого примера, устройство 120 обработки (например, мобильный телефон или компьютер) может средствами связи соединяться с гарнитурой 1900 и датчиком 110. Датчик 1910 может быть датчиком вибрации.
Датчик 1910 вибрации может принимать сигнал вибрации, сформированный движениями тела пользователя, через гарнитуру 1900. Когда пользователь носит на себе гарнитуру 1900, гарнитура 1900 может прикрепляться к части тела пользователя (например, к уху) и сигнал вибрации может точно передаваться датчику вибрации через гарнитуру 1900. В некоторых вариантах осуществления датчик вибрации может также напрямую прикрепляться к части тела пользователя (например, к уху). Сигнал вибрации, сформированный движениями тела пользователя, может напрямую собираться датчиком вибрации, не проходя через гарнитуру 1900. В этом варианте осуществления движение тела пользователя может обратиться к стучанию зубами и растиранию пользователя. Пользователь может формировать сигнал вибрации при постукивании зубами или растирании. Сигнал вибрации может передаваться датчику вибрации через кости или лицевые мышцы пользователя.
В некоторых вариантах осуществления гарнитура 1900 можно носиться с одной стороны уха пользователя. Например, гарнитура 1900 может быть гарнитурой Bluetooth с одиночным динамиком, который носят на левом или правом ухе пользователя. В этом случае датчик 1910 вибрации может собирать сигнал вибрации, передаваемый к левому или правому уху пользователя. В некоторых вариантах осуществления гарнитуру 1900 можно также носить на обоих ушах пользователя. Например, гарнитура 1900 может быть гарнитурой, супраауральной гарнитурой, гарнитурой, вставляемой в ухо, и т.д. с двумя динамиками. Эти два динамика можно соответственно носить на левом и правом ушах пользователя. В этом случае датчик 1910 вибрации может содержать два датчика вибрации, собирающих сигналы вибрации, передаваемые к левому и правому ушам пользователя.
В некоторых вариантах осуществления устройство 210 обработки может принимать измеряемый сигнал вибрации, формируемый датчиком 1910 вибрации, и идентифицировать признак сигнала для измеряемого сигнала вибрации. Устройство 210 обработки может определять действие целевого объекта, основываясь на признаке сигнала, например, переключение целевого объекта из первого состояния во второе состояние. Целевой объект может быть гарнитурой 1900 или оконечным устройством 130 (например, мобильным устройством (таким как носимое смарт-устройство), планшетным компьютером, ноутбуком, устройством, встроенным в транспортное средство (таким как система контроля двигателя транспортного средства, кондиционер, автомобильный свет, стеклоочиститель ветрового стекла, и т.д.), домашним смарт-устройством (таким как управление освещением, телевизором, шторами и т.д.) и т.п. или любым их сочетанием). Подробное описание работы устройства 210 обработки, определяющего целевой объект, основываясь на сигнале обнаружения вибрации, можно найти на фиг. 21 и в соответствующих описаниях в настоящем раскрытии.
По сравнению со способом управления оконечным устройством (например, носимым устройством) посредством кнопки, панели управления и т.д., подача носимому устройству и другим оконечным устройствам рабочей команды путем стучания зубами освобождает руки пользователя, делая это более безопасным в определенных ситуациях (например, при вождении автомобиля, езде на велосипеде и в условиях темноты). Одновременно, по сравнению со способом управления оконечным устройством, посылая аудиосигнал, подача рабочей команды оконечному устройству с помощью стучания зубами может быть более скрытной, не создавать помех окружающим людям и может быть способствовать конфиденциальности персональных данных пользователя.
На фиг. 20 представлена блок-схема последовательности выполнения операций примерного процесса управления целевым объектом в соответствии с некоторыми вариантами осуществления настоящего раскрытия. Сигнал вибрации, сформированный движением тела пользователя (например, стучанием зубами), может передаваться датчику 1910 вибрации через лицевые кости или мышцы пользователя. Процесс передачи сигнала вибрации представлен на фиг. 21. Как показано на фиг. 21, стучание зубами пользователя может формировать сигнал вибрации в точке P стучания и сигнал вибрации может передаваться к датчику 1910 вибрации через лицевую кость пользователя. Путь прохождения сигнала вибрации, передаваемого от точки P к датчику 1910 вибрации, показан на чертеже как путь А прохождения передачи.
Когда датчик 1910 вибрации собрал сигнал вибрации, может быть сформирован соответствующий измеряемый сигнал вибрации. После приема измеряемого сигнала вибрации устройство 120 обработки может обрабатывать измеряемый сигнал вибрации, чтобы идентифицировать признак сигнала в измеряемом сигнале вибрации. Признак сигнала может содержать количество пиков вибрации, временной интервал между двумя соседними пиками вибрации, мощность сигнала, частотные составляющие или длительность сигнала для измеряемого сигнала вибрации, сформированного датчиком вибрации. Количество пиков вибрации измеряемого сигнала вибрации может отражать количество стучаний зубами. Временной интервал между двумя соседними пиками вибрации для измеряемого сигнала вибрации может отражать скорость стучания. Мощность сигнала для измеряемого сигнала вибрации может отражать силу стучания зубами. Частотные составляющие измеряемого сигнала вибрации могут отражать, присутствуют ли другие объекты между зубами (например, пища). Если другие объекты существуют, низкочастотные компоненты могут возрастать. Длительность сигнала для измеряемого сигнала вибрации может отражать длительность всего измеряемого сигнала вибрации или длительность одиночного пика вибрации.
В некоторых вариантах осуществления устройство 120 обработки может определить, соответствует ли признак сигнала для измеряемого сигнала одному из множества заданных состояний признаков. Каждое заданное состояние признака может соответствовать по меньшей мере одному действию целевого объекта или команде управления целевым объектом для выполнения действия. В некоторых вариантах осуществления устройство 120 обработки может использовать признак сигнала, соответствующий комбинации конкретных стуков, в качестве заданного состояния признака. Например, признак сигнала, соответствующий двум постукиваниям (интервал ∆t времени вибрации пика меньше, чем первый порог t0 интервала постукивания), может назначаться в качестве заданного состояния признака. Заданное состояние признака может соответствовать операции переключателя по включению/выключению гарнитуры 1900. Например, признак сигнала, соответствующий двум медленным последовательным постукиваниям (интервал ∆t времени пика вибрации меньше, чем первый порог t0 интервала постукивания, и меньше, чем второй порог t1 интервала постукивания), может определяться как заданное состояние признака. Заданное состояние признака может соответствовать работе/паузе в работе гарнитуры 1900.
Когда признак сигнала для измеряемого сигнала соответствует одному из заданных состояний признака, устройство 120 обработки может определить действие целевого объекта, соответствующее измеряемому сигналу. Например, когда признак сигнала соответствует заданному состоянию признака, состоящего из двух последовательных стуков, устройство 120 обработки может управлять гарнитурой 1900, чтобы выполнить операцию включения/выключения переключателя. Устройство 120 обработки может определять состояние гарнитуры 1900. Когда гарнитура 1900 находится во включенном состоянии (то есть, первом состоянии), может быть решено, что гарнитура 1900 переключается в выключенное состояние (то есть, второго состояния). Когда гарнитура 1900 находится в выключенном состояния, может быть принято решение, что гарнитура 1900 переключается во включенное состояние.
В некоторых вариантах осуществления, когда датчик вибрации содержит только датчик вибрации, расположенный в определенном месте (например, на фиг. 22, датчик вибрации располагается только в правой части гарнитуры 1900), признак сигнала может содержать количество пиков вибрации, временной интервал между двумя соседними пиками вибрации и/или длительность сигнала вибрации для измеряемого сигнала вибрации, сформированного датчиком вибрации. В некоторых вариантах осуществления, когда измерительный блок содержит датчики вибрации, расположенные в разных местах (например, на фиг. 24, датчики вибрации 1920 и 1910 соответственно располагаются в левой и правой частях гарнитуры 1900), признак сигнала для измеряемого сигнала может также содержать разность фаз измеряемых сигналов датчиков вибрации, расположенных в разных местах. Разность фаз может быть выполнена с возможностью определения местоположения источника вибрации (то есть, точки Р стучания зубами). Например, как показано на фиг. 24, когда точка P стучания находится на правой стороне, расстояния между точкой P стучания и датчиками вибрации, расположенными в различных местах, могут различаться, поэтому длины путей передачи вибрации (например, путь В передачи вибрации от точки P стучания к датчику вибрации 1920, который находится слева, и путь А передачи вибрации от точки P стучания к датчику вибрации 1910, который находится справа), могут отличаться. Датчик 1910 вибрации, расположенный справа, может получить сигнал вибрации первым, а датчик 1920 вибрации, расположенный слева, может получить сигнал вибрации позже. Сигналы вибрации, собранные двумя датчиками 1910 и 1920 вибрации, могут иметь разность фаз. Основываясь на разности фаз, может быть определена разность между путем В передачи вибрации и путем А передачи вибрации. Поскольку места расположения датчиков 1910 и 1920 датчиков фиксированы, местоположение точки Р стучания (например, слева, справа, середина и т.д.) может быть определено.
В некоторых случаях, располагая источник вибрации (то есть, точку стучания P зубами), пользователь может объединить больше типов и создать более сложные операций стучания зубами, изменяя местоположение точки P, количество стучаний и/или интервал стучаний и т.д., чтобы соответствовать более сложным действиям целевого объекта или рабочим командам.
В некоторых случаях пользователь может выполнять стучание зубами непреднамеренно или обязательно. Например, когда пользователь ест, может происходить стучание зубами. Как другой пример, когда пользователь говорит, может происходить стучание зубами. Например, когда тело пользователя движется, например, при дрожании, чихании и т.д. и внешнем ударе (например, при столкновении), стучание зубами также может происходить. Вышеупомянутая ситуация может инициировать действие целевого объекта (то есть, ложное инициирование). В некоторых вариантах осуществления устройство 120 обработки может экранировать или идентифицировать измеряемый сигнал, чтобы избежать ложного срабатывания.
Устройство 120 обработки может получать измеряемый сигнал вибрации по меньшей мере от одного датчика вибрации в реальном времени или периодически. Когда получают измеряемый сигнал вибрации (также называемый вторым измеряемым сигналом), устройство 120 обработки может получить соответствующую информацию второго измеряемого сигнала, такую как частота, мощность сигнала и т.д. Устройство 120 обработки может определить, является ли второй измеряемый сигнал ложным сигналом срабатывания, основываясь на соответствующей информации второго измеряемого сигнала. Например, устройство 120 обработки может определить, является ли второй измеряемый сигнал ложным сигналом срабатывания, основываясь на частоте второго измеряемого сигнала. Например, когда частота второго измеряемого сигнала ниже, чем заданный частотный порог, второй измеряемый сигнал может определяться как ложный сигнал срабатывания. Когда частота второго измеряемого сигнала ниже, чем заданный частотный порог, можно считать, что пользователь ест. Измеряемый сигнал, сформированный в это время, может определяться как ложный сигнал срабатывания и целевой объект не должен выполнять никакое действие.
В некоторых вариантах осуществления датчик 110 может также содержать устройство аудиоввода (например, микрофон). В некоторых вариантах осуществления микрофон также может быть элементом носимого устройства (например, гарнитуры 1900). Когда получают измеряемый сигнал вибрации (также называемый третьим измеряемым сигналом), устройство 120 обработки может определить, получает ли устройство аудиоввода одновременно аудиоинформацию пользователя. Если устройство аудиоввода получает аудиоинформацию пользователя, третий измеряемый сигнал может определяться как ложный сигнал срабатывания. В этом случае можно считать, что пользователь разговаривает с другими или использует устройство связи для звонка. Измеряемый сигнал, формируемый в этом случае, может определяться как ложный сигнал срабатывания и целевой объект не должен выполнять никакое действие.
В некоторых вариантах осуществления, когда получают измеряемый сигнал вибрации (также называемый четвертым измеряемым сигналом), устройство 120 обработки может определить, является ли четвертый измеряемый сигнал ложным сигналом срабатывания, основываясь на модели идентификации ложного срабатывания. В некоторых вариантах осуществления модель идентификации ложного срабатывания может быть моделью машинного обучения. В некоторых вариантах осуществления устройство 120 обработки может использовать четвертый измеряемый сигнал в качестве входных данных модели машинного обучения. Результат того, является ли четвертый измеряемый сигнал ложным сигналом срабатывания, может быть получен с помощью модели машинного обучения. Если четвертый измеряемый сигнал является ложным сигналом срабатывания, целевой объект не должен выполнять никакое действие. Если четвертый измеряемый сигнал не является ложным сигналом срабатывания, сигнал о том, что интервал между сигналом и четвертым измеряемым сигналом находится в пределах диапазона другого порогового времени (например, 2 с, 3 с, 5 с, 10 с и т.д.), может назначаться устройством 120 обработки как измеряемый сигнал. В некоторых вариантах осуществления модель идентификации ложного срабатывания может быть обучаемой моделью машинного обучения. Учебный процесс модели идентификации ложного срабатывания может быть таким же как или подобен учебному процессу модели извлечения признака.
На фиг. 22 схематично представлена система управления целевым объектом, применяемая к носимому устройству в соответствии с некоторыми вариантами осуществления настоящего раскрытия. Один или более компонентов или блоков системы 100 управления целевым объектом могут быть интегрированы в гарнитуру 1900 или средствами связи соединяться с гарнитурой 1900. Как показано на фиг. 22, датчик 1910 вибрации может быть расположен в правой части гарнитуры 1900, а в левой части гарнитуры 1900 не располагается никакой датчик вибрации. Во время стука пользователя зубами в точке Р может быть сформирован сигнал вибрации. Сигнал вибрации может передаваться датчику 1910 вибрации через путь А передачи вибрации. Датчик 1910 вибрации может формировать соответствующий измеряемый сигнал вибрации согласно собранному сигналу вибрации. Устройство 120 обработки может идентифицировать признак сигнала в измеряемом сигнале вибрации и определять, соответствует ли признак сигнала заданному состоянию признака. В некоторых вариантах осуществления измеряемый сигнал вибрации может быть выведен в виде спектра признака сигнала. Основываясь на спектре признака сигнала, устройство 120 обработки может идентифицировать признак сигнала для измеряемого сигнала. Например, устройство 120 обработки может считывать количество пиков вибрации, частотные составляющие сигнала и т.д. из спектра признака сигнала. На фиг. 23 схематично показан спектр признака сигнала для измеряемого сигнала, соответствующего стуку зубами пользователя в соответствии с некоторыми вариантами осуществления настоящего раскрытия. Как показано на фиг. 23, измеряемый сигнал может содержать три пика вибрации. Согласно времени сбора/формирования сигнала, временной интервал между двумя предыдущими пиками вибрации из числа трех пиков вибрации, может быть ∆t1, а временной интервал между двумя последующими пиками вибрации из числа трех пиков вибрации может быть равен ∆t2.
В некоторых вариантах осуществления признак сигнала, соответствующий определенному стуку зубами, может определяться как заданный признак. Примерный стук зубами может содержать (1) двойной последовательный стук: ∆t; (2) двойной медленный стук: t1> ∆t> t0; (3) троекратный последовательный стук: ∆t1; (4) троекратный медленный стук: t1> ∆t1> t0, t1> ∆t2> t0; (5) два последовательных стука + одиночный медленный стук: ∆t1> ∆t2> t0; (6) одиночный медленный стук + двойной последовательный стук: t1> ∆t1> t0, ∆t2. ∆t обозначает временной интервал между двумя соседними стуками (который может отражать временной интервал между двумя пиками вибрации). t0 обозначает первый порог интервала между стуками, и t1 обозначает второй порог интервала между стуками. В некоторых вариантах осуществления первый порог t0 интервала между стуками может быть равен 0,1 с – 1 с. В некоторых вариантах осуществления первый порог t0 интервала между стуками может быть равен 0,15 с – 0,9 с. В некоторых вариантах осуществления первый порог t0 интервала между стуками может быть равен 0,2 с – 0,8 с. В некоторых вариантах осуществления второй порог t10 интервала между стуками может быть равен 0,8 с – 5 с. В некоторых вариантах осуществления второй порог t1 интервала между стуками может быть равен 0,9 с – 4 с. В некоторых вариантах осуществления второй порог t1 интервала между стуками может быть равен 1 с – 2 с.
Признак сигнала для измеряемого сигнала, сформированного вышеупомянутым стуком зубами, может соответствовать различным действиям целевого объекта, соответственно. Примерное действие может содержать включение/выключение питания, воспроизведение/пауза, соединение/приостановка вызова, увеличение/уменьшение громкости, включение/выключение Bluetooth и т.п. Следует заметить, что вышеупомянутый стук зубами, значения сопутствующих параметров и действия соответствующего целевого объекта могут быть просто примером и не могут ограничивать объем защиты настоящего раскрытия.
В некоторых вариантах осуществления, когда признак сигнала для измеряемого сигнала, сформированного стуком зубов пользователя, соответствует определенному заданному состоянию признака, устройство 120 обработки может определить действие целевого объекта, соответствующее конкретному заданному признаку, и управлять целевым объектом (например, оконечным устройством, таким как гарнитура 1900, мобильный телефон и т.д.), чтобы выполнить действие.
На фиг. 24 схематично представлена система управления целевым объектом, применяемая к носимому устройству в соответствии с некоторыми вариантами осуществления настоящего раскрытия. В отличие от варианта осуществления, представленного на фиг. 22, в этом варианте осуществления левая и правая части гарнитуры 1900 могут содержать датчики 1920 и 1910 вибрации, соответственно. Датчик 1910 вибрации может быть таким же или подобным датчику 1920 вибрации. Сигнал вибрации, сформированный в точке Р стука зубами, может передаваться датчику 1920 вибрации, расположенному слева, через путь В передачи вибрации, и может передаваться датчику 1910 вибрации, расположенному справа, через путь А передачи вибрации. Датчики 1910 и 1920 вибрации могут формировать измеряемый сигнал a и измеряемый сигнал b, соответственно. Устройство 120 обработки может идентифицировать признак сигнала для измеряемого сигнала a и измеряемого сигнала b (например, пики вибрации измеряемого сигнала a/b, временной интервал между двумя соседними пиками вибрации измеряемого сигнала a/b, длительность сигнала для измеряемого сигнала a/b и/или разность фаз измеряемого сигнала a и измеряемого сигнала b) и определить, соответствует ли признак сигнала заданному состоянию признака.
В некоторых вариантах осуществления признак сигнала, соответствующий определенному стуку зубами, может определяться как заданное состояние признака. Через зуб левой стороны, зуб правой стороны или средний зуб (то есть, резец) примерный стук зубами может содержать (1) двойной последовательный стук: ∆t; (2) двойной медленный стук: t1> ∆t> t0; (3) троекратный последовательный стук: ∆t1; (4) троекратный медленный стук: t1> ∆t1> t0, t1> ∆t2> t0; (5) два последовательных стука + одиночный медленный стук: ∆t1> ∆t2> t0; (6) одиночный медленный стук + двойной последовательный стук: t1> ∆t1> t0, ∆t2. В других примерах стук зубами может завершаться совместным стуком зуба левой стороны, зуба правой стороны и среднего зуба. Например, (1) двойной последовательный стук слева (то есть, зуб левой стороны) + один стук на правой стороне (то есть, зуб правой стороны): ∆t1 > ∆t2 > t0; (2) двойной последовательный стук на левой стороне + один стук посредине (то есть, средний зуб): ∆t1 > ∆t2 > t0; (3) двойной последовательный стук справа + один стук слева: ∆t1 > ∆t2 > t0; (4) двойной последовательный стук справа + один стук посредине: ∆t1 > ∆t2 > t0; (5) двойной последовательный стук посредине + один стук справа: ∆t1 > ∆t2 > t0; (6) двойной последовательный стук посредине + один стук слева: ∆t1 > ∆t2 > t0; (7) один стук слева + двойной последовательный стук справа: t1 > ∆t2 > t0, ∆t2; (8) один стук слева + двойной последовательный стук посредине: t1 > ∆t2 > t0, ∆t2; (9) один стук справа + двойной последовательный стук слева: t1 > ∆t2 > t0, ∆t2; (10) один стук справа + двойной последовательный стук посредине: t1 > ∆t2 > t0, ∆t2; (11) один стук справа + двойной последовательный стук справа: t1 > ∆t2 > t0, ∆t2; (12) один стук посредине + двойной последовательный стук слева: t1 > ∆t2 > t0, ∆t2.
Признаки сигнала для измеряемых сигналов, сформированных вышеупомянутым стуком зубов, могут соответствовать различным действиям целевого объекта, соответственно. Примерное действие может содержать включение/выключение электропитания, воспроизведение/паузу, соединение/отбой вызовов, набор/отбой аварийных контактов, набор/отбой аварийных центров, увеличение/уменьшение громкости, включение/выключение Bluetooth, увеличение/уменьшение яркости света и т.д. Следует заметить, что вышеупомянутое похлопывание зубами и действия соответствующего целевого объекта могут быть просто примером и не могут ограничивать объем защиты настоящего раскрытия.
В некоторых вариантах осуществления, когда признак сигнала для измеряемого сигнала, сформированного стучанием зубами пользователя, соответствует определенному заданному состоянию признака, устройство 120 обработки может определить действие целевого объекта, соответствующее конкретному заданному признаку, и управлять целевым объектом (например, оконечным устройством, таким как гарнитура 1900, мобильный телефон и т.д.), чтобы выполнить действие.
Описав, таким образом, базовые концепции, специалистам в данной области техники после прочтения настоящего подробного раскрытия должно быть достаточно очевидно, что предшествующее подробное раскрытие предназначено ля представления в качестве только примера и не является ограничивающим. Хотя здесь это явно не утверждается, специалисты в данной области техники могут вносить в настоящее раскрытие различные изменения, улучшения и поправки. Эти изменения, улучшения, и поправки подразумеваются предлагаемыми настоящим раскрытием и находятся в рамках сущности и объема защиты примерных вариантов осуществления этого раскрытия.
Кроме того, для описания вариантов осуществления настоящего раскрытия использовалась определенная терминология. Например, термины «один вариант осуществления», «вариант осуществления» и/или «некоторые варианты осуществления» означают, что конкретный признак, структура или характеристика, описанные в связи с вариантом осуществления, включаются по меньшей мере в один вариант осуществления настоящего раскрытия. Поэтому подчеркивается и следует понимать, что две или более ссылки на «вариант осуществления» или «один вариант осуществления» или «альтернативный вариант осуществления» в различных частях настоящего описания не обязательно всегда относятся к одному и тому же варианту осуществления. Кроме того, некоторые признаки, структуры или признаки в настоящем раскрытии одного или более вариантов осуществления могут соответственно объединяться.
Дополнительно, специалисты в данной области техники должны понимать, что подходы настоящего раскрытия могут иллюстрироваться и описываться здесь в любом из множества патентоспособных классов или в контексте, содержащем любой новый и полезный процесс, машину, изготовление или состав веществ, или любое новое и полезное их улучшение. Соответственно, все подходы настоящего раскрытия могут выполняться полностью аппаратными средствами, могут выполняться полностью программным обеспечением (включая встроенное микропрограммное обеспечение, резидентное программное обеспечение, микрокод и т.д.) или могут выполняться сочетанием аппаратного и программного обеспечения. Вышеупомянутые аппаратные средства или программное обеспечение могут упоминаться как «блок данных,» «модуль,» «механизм», «блок», «компонент» или «система». Кроме того, подходы настоящего раскрытия могут показываться как компьютерный продукт, расположенный на одном или более считаемых компьютером носителях, продукте, содержащем считываемую компьютером управляющую программу.
Дополнительно, описанный порядок обработки элементов или последовательностей или использования номеров, букв, или других обозначений поэтому не предназначен ограничивать заявленные процессы и способы любым порядком, за исключением того, что может быть определено в формуле изобретения. Хотя приведенное выше раскрытие обсуждает через различные примеры то, что в настоящий момент считается множеством полезных вариантов осуществления раскрытия, следует понимать, что такая подробность приводится исключительно с этой целью и что добавленная формула изобретения не ограничивается раскрытыми вариантами осуществления, а, напротив, подразумевает включение в себя изменений и эквивалентных расположений, которые находятся в рамках сущности и объема защиты раскрытых вариантов осуществления. Например, хотя реализация различных компонентов, описанных выше, может быть осуществлена в устройстве, оно может также быть реализовано в виде только решения программного обеспечения, то есть, установкой на существующем сервере или мобильном устройстве.
Точно также, следует понимать, что в предшествующем описании вариантов осуществления настоящего раскрытия различные признаки иногда группируются вместе в единый вариант осуществления, чертеже или их описание с целью совершенствования помощи раскрытию в понимании одного или более различных вариантов осуществления. Однако, это раскрытие не означает, что представленный объект раскрытия требует больше признаков, чем количество функции, упомянутые в формуле изобретения. Скорее заявленный предмет изобретения может укладываться менее чем во все признаки единого раскрытого выше варианта осуществления.
В некоторых вариантах осуществления числа, выражающие количества компонентов, свойства и т.д., используемые для описания и заявления определенных вариантов осуществления заявки, должны быть пониматься как модифицируемые в некоторых случаях термином «около», «приблизительно», или «по существу». Например, «около», «приблизительно» или «по существу» может указывать на ±20-типроцентое изменение описываемого значения, если не заявляется иное. Соответственно, в некоторых вариантах осуществления, численные параметры, приведенные в письменном описании и приложенной формуле изобретения, являются приближениями, которые могут варьироваться в зависимости от требуемых свойств, которые хотят получить в конкретном варианте осуществления. В некоторых вариантах осуществления численные параметры должны рассматриваться в свете числа значащих цифр и применения обычных способов округления. Несмотря на то, что численные диапазоны и параметры, представляющие широкий объем некоторых вариантов осуществления заявки, являются приближенными, численные значения, представленные в конкретных примерах, сообщаются настолько точно, насколько это практически возможно.
Наконец, следует понимать, что варианты осуществления, описанные в настоящем раскрытии просто иллюстрируют принципы вариантов осуществления настоящего раскрытия. Другие изменения могут находиться в рамках настоящего раскрытия. Соответственно, для примера, но не для ограничения, альтернативные конфигурации вариантов осуществления настоящего раскрытия, могут рассматриваться как совместимые с принципами настоящего раскрытия. Соответственно, варианты осуществления настоящего раскрытия не ограничиваются вариантами осуществления, явно представленными и описанными в настоящем раскрытии.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМЫ И СПОСОБЫ ИДЕНТИФИКАЦИИ НЕТРЕЗВЫХ ЗАКАЗЧИКОВ НА ПЛАТФОРМЕ ОНЛАЙН-ОФЛАЙН СЕРВИСА | 2018 |
|
RU2753458C1 |
| СПОСОБЫ И СИСТЕМЫ ИДЕНТИФИКАЦИИ ДЕЙСТВИЯ ПОЛЬЗОВАТЕЛЯ | 2022 |
|
RU2813471C1 |
| СЕНСОРНЫЕ СТИМУЛЫ ДЛЯ ПОВЫШЕНИЯ ТОЧНОСТИ ОЦЕНКИ ОПРЕДЕЛЕНИЯ СТАДИЙ СНА | 2014 |
|
RU2672684C2 |
| УСТРОЙСТВО, СПОСОБ И КОМПЬЮТЕРНАЯ ПРОГРАММА ДЛЯ ОБЕСПЕЧЕНИЯ ПРЕДОСТАВЛЕНИЯ ИНФОРМАЦИИ ПОЛЬЗОВАТЕЛЮ | 2014 |
|
RU2601152C2 |
| НОСИМОЕ УСТРОЙСТВО, СПОСОБ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ УРОВНЯ ГЛИКИРОВАННОГО ГЕМОГЛОБИНА | 2024 |
|
RU2832523C1 |
| СПОСОБЫ ОПТИМИЗАЦИИ РАБОЧЕГО СОСТОЯНИЯ НАУШНИКОВ С КОСТНОЙ ПРОВОДИМОСТЬЮ | 2021 |
|
RU2801826C1 |
| СПОСОБ ЗАПУСКА ПРИЛОЖЕНИЯ И ЭЛЕКТРОННОЕ УСТРОЙСТВО | 2020 |
|
RU2802281C2 |
| СИСТЕМЫ И СПОСОБЫ ПОЛУЧЕНИЯ ПЕРЕДАТОЧНОЙ ФУНКЦИИ ВИБРАЦИИ | 2020 |
|
RU2803713C1 |
| СЕНСОРНЫЙ ЭКРАН, ЭЛЕКТРОННОЕ УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ДИСПЛЕЕМ | 2020 |
|
RU2795259C1 |
| ОСНОВАННАЯ НА МОЗГОВЫХ ВОЛНАХ СЕНСОРНАЯ СТИМУЛЯЦИЯ С ОБРАТНОЙ СВЯЗЬЮ ДЛЯ ВЫЗОВА СНА | 2014 |
|
RU2656556C2 |
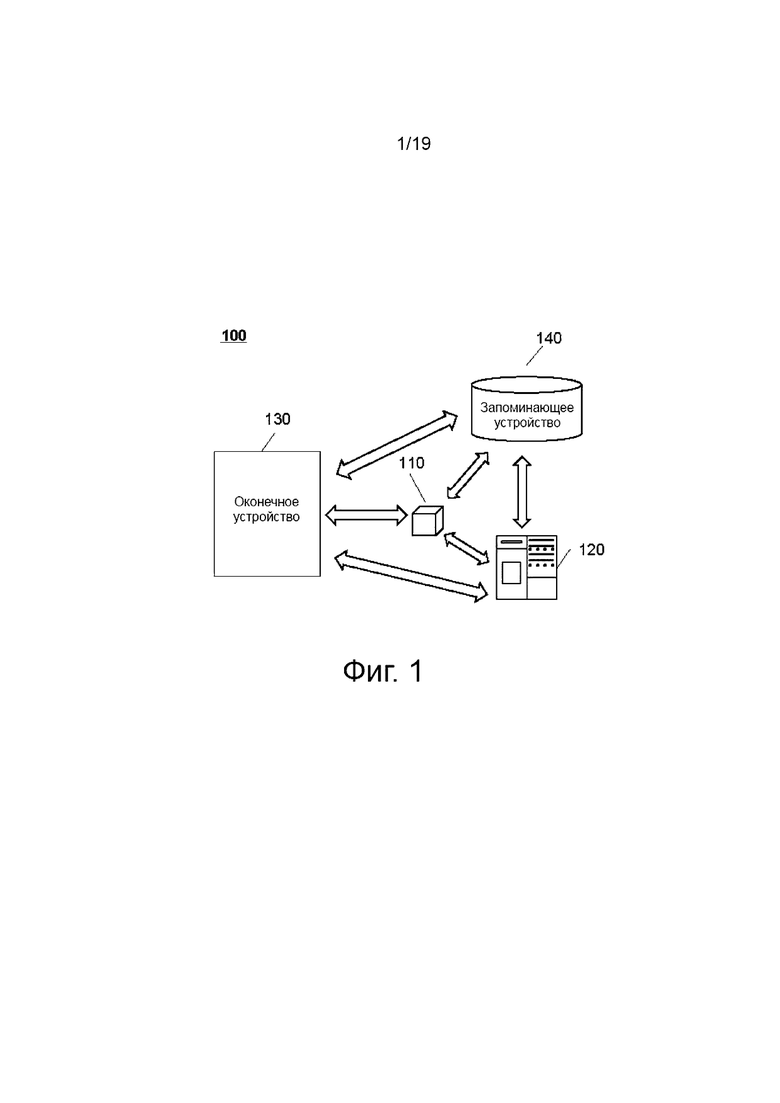
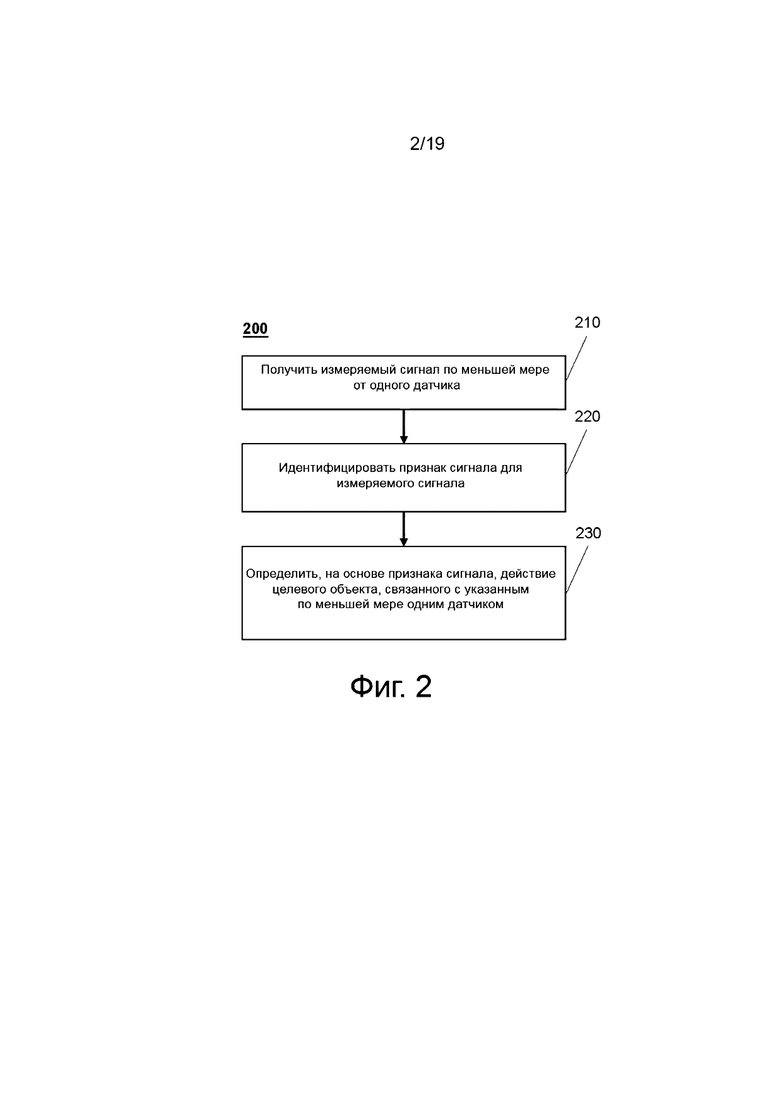
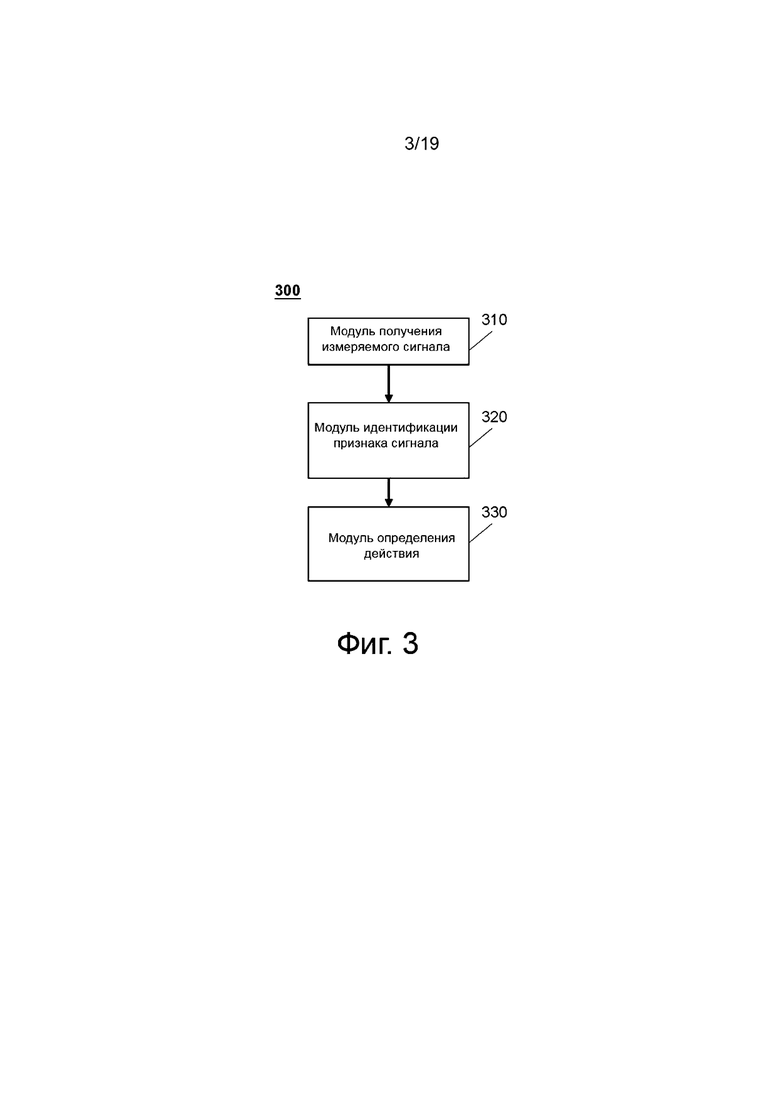
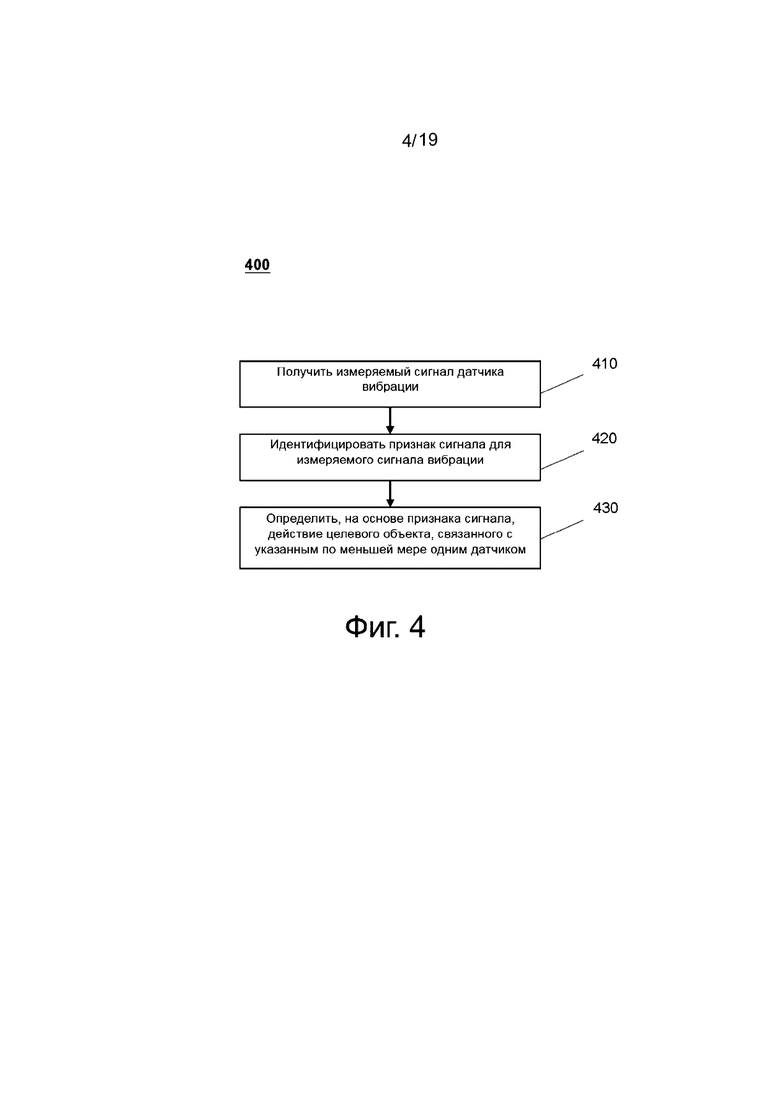
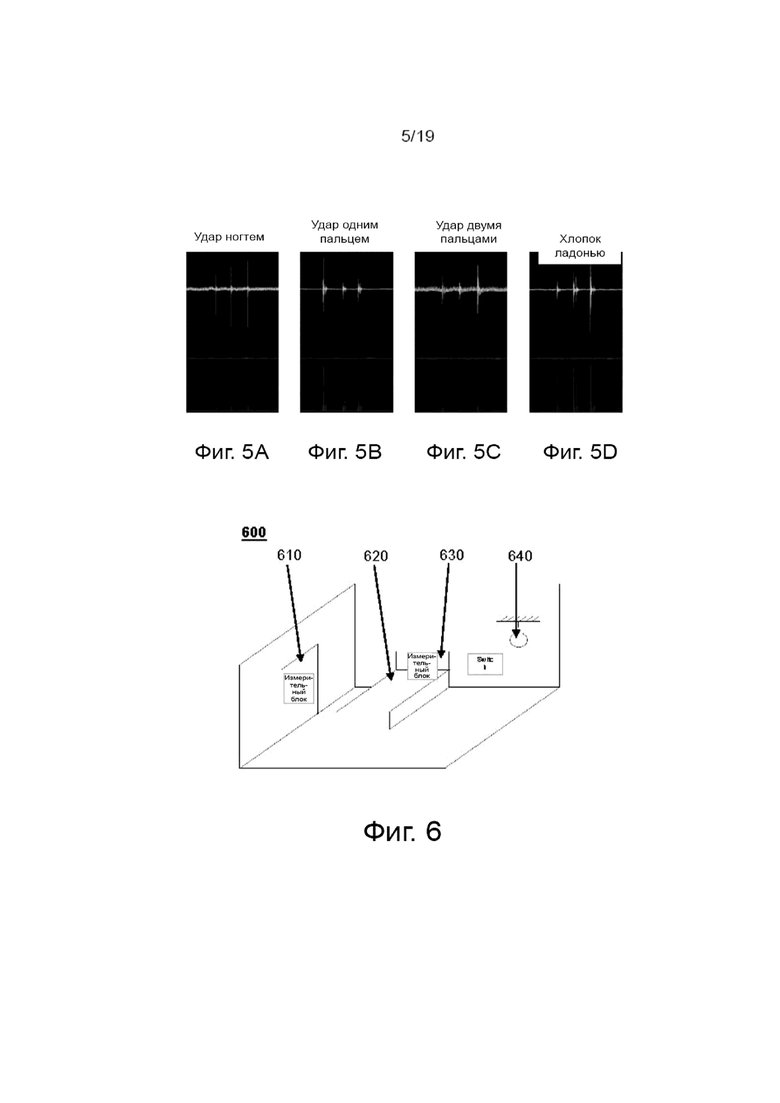
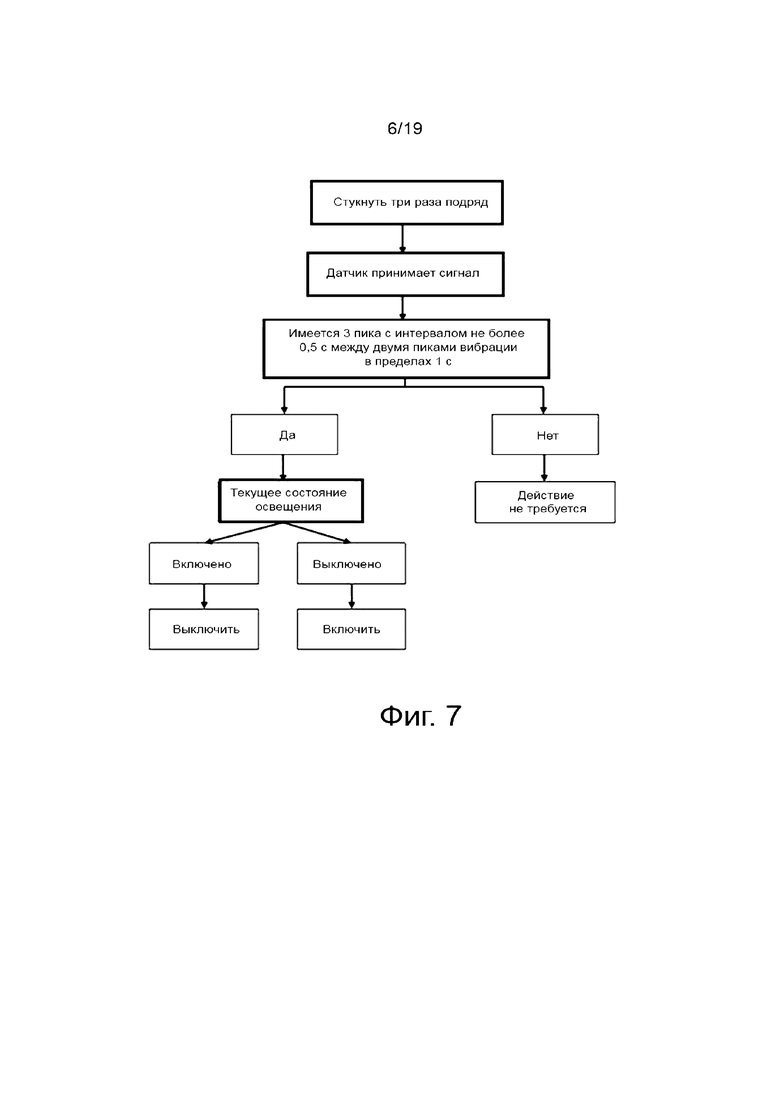
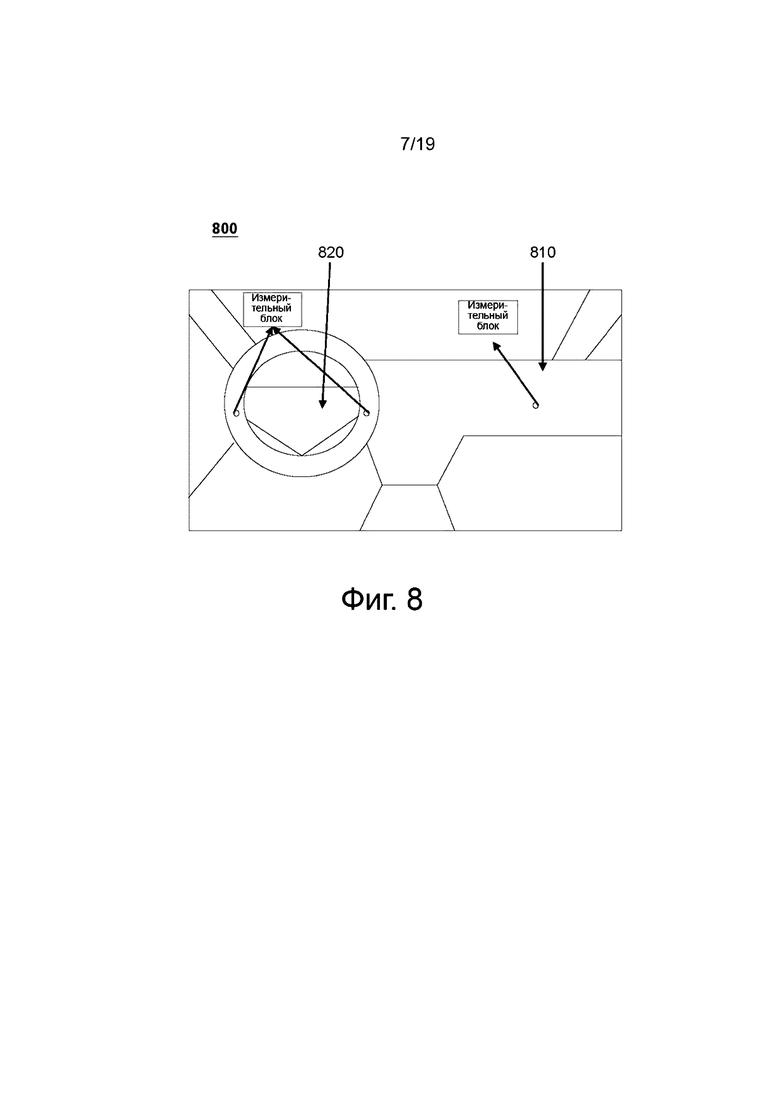
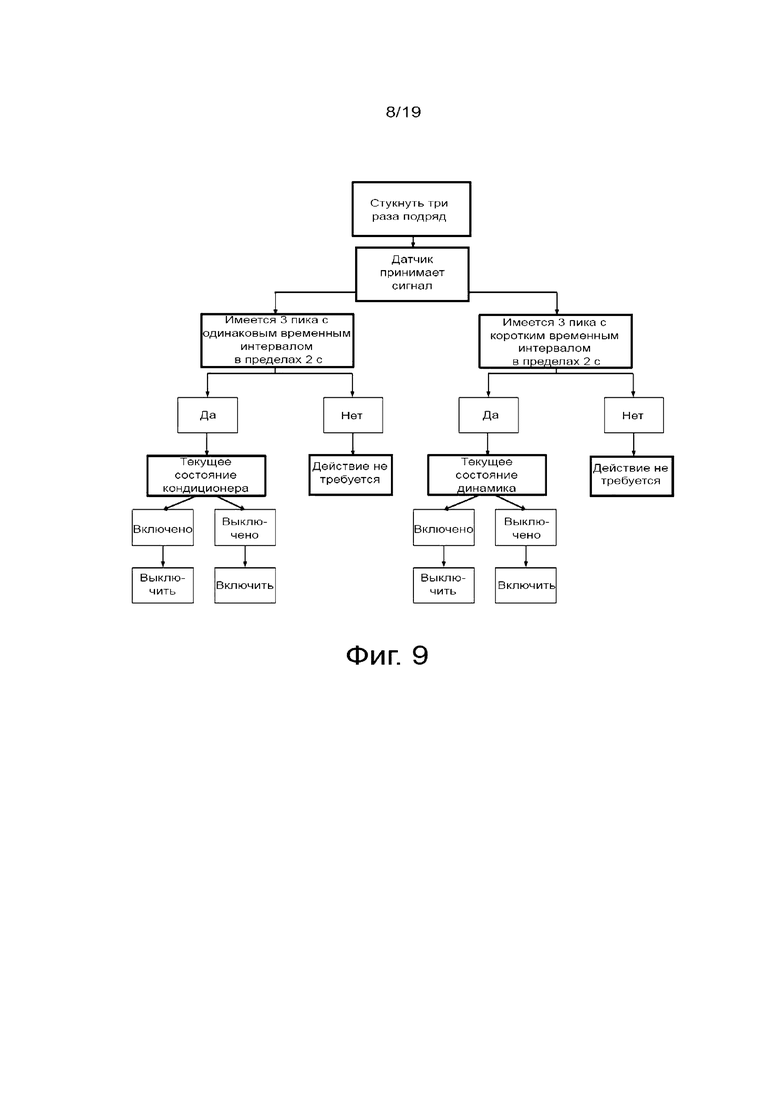
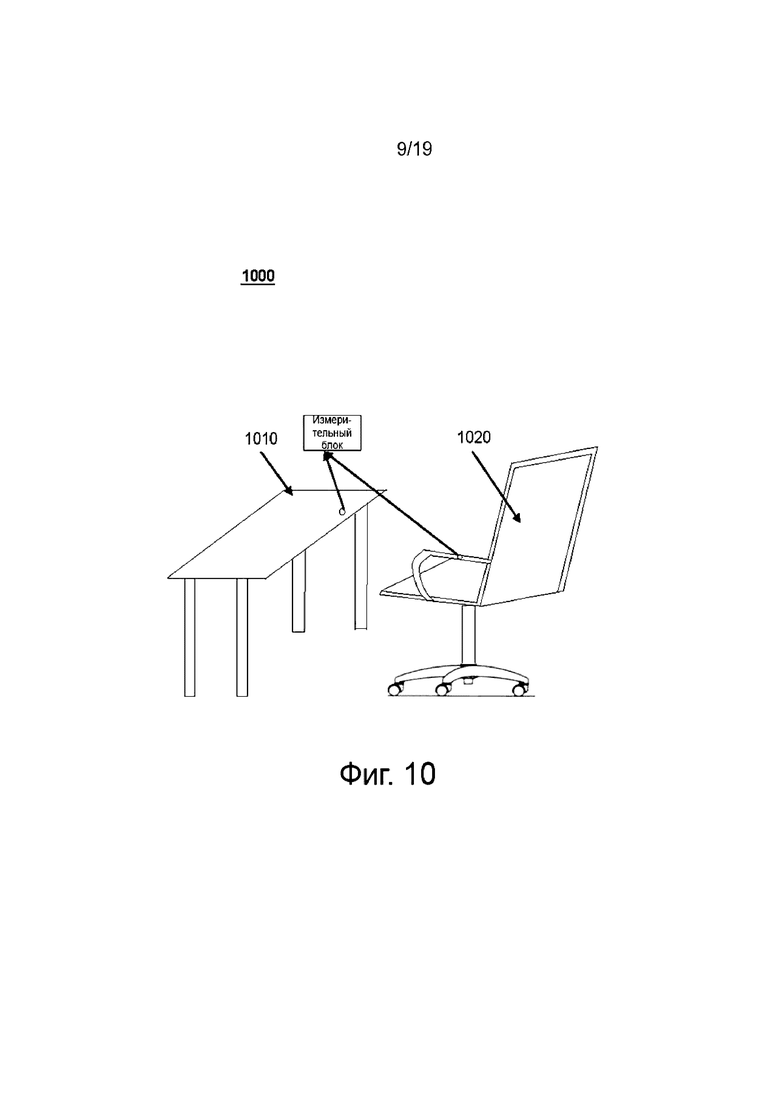
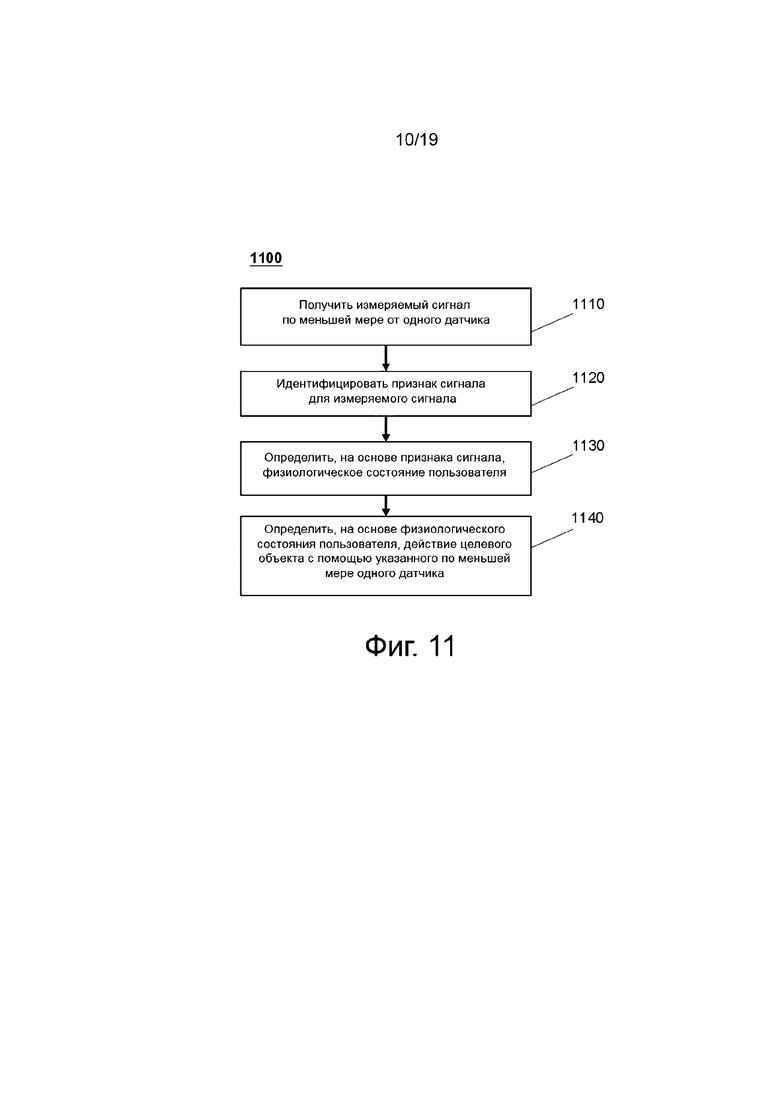
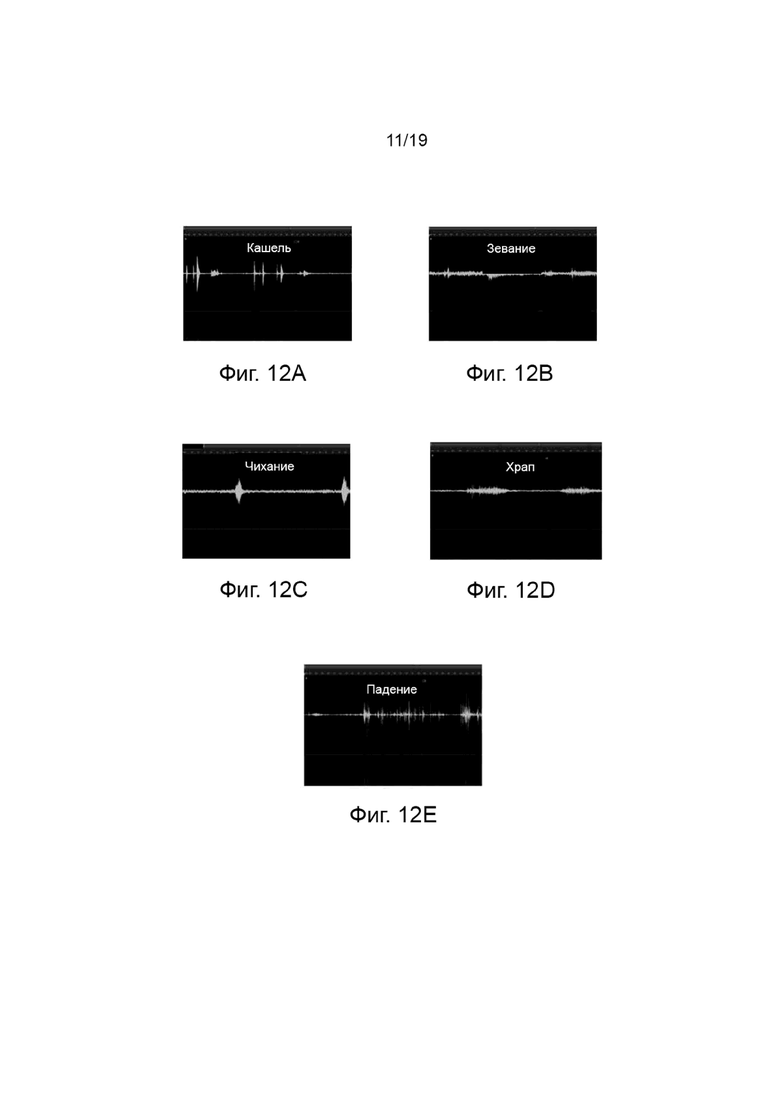
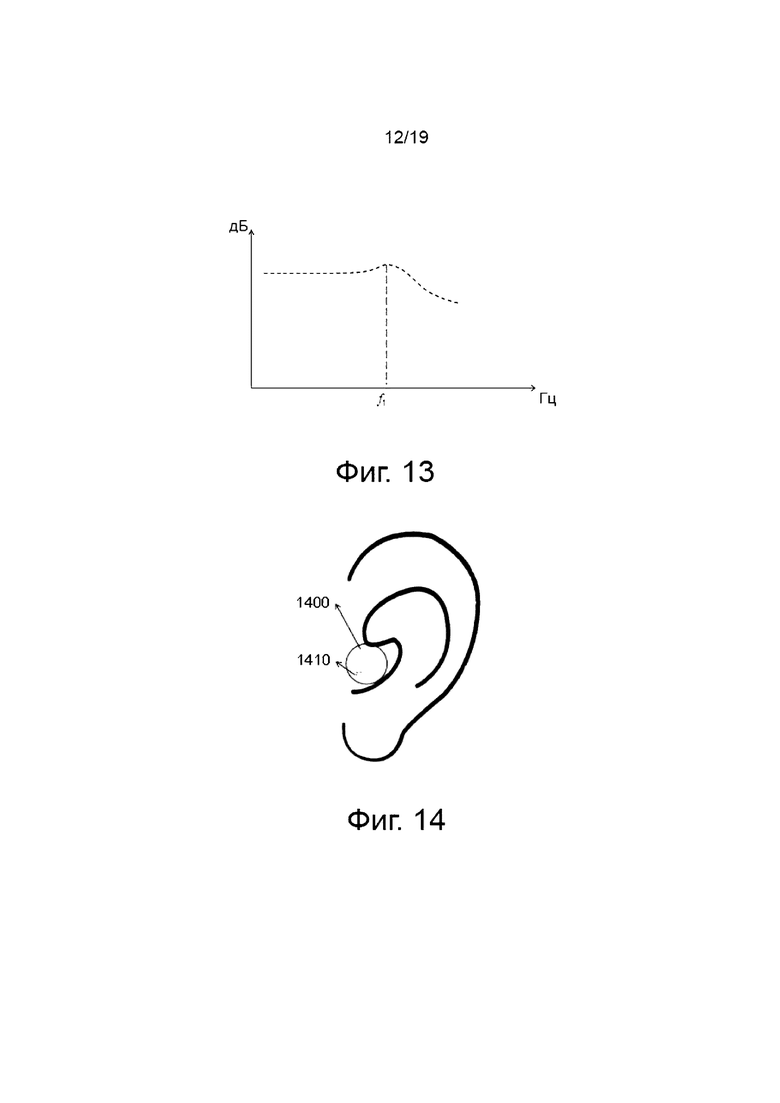
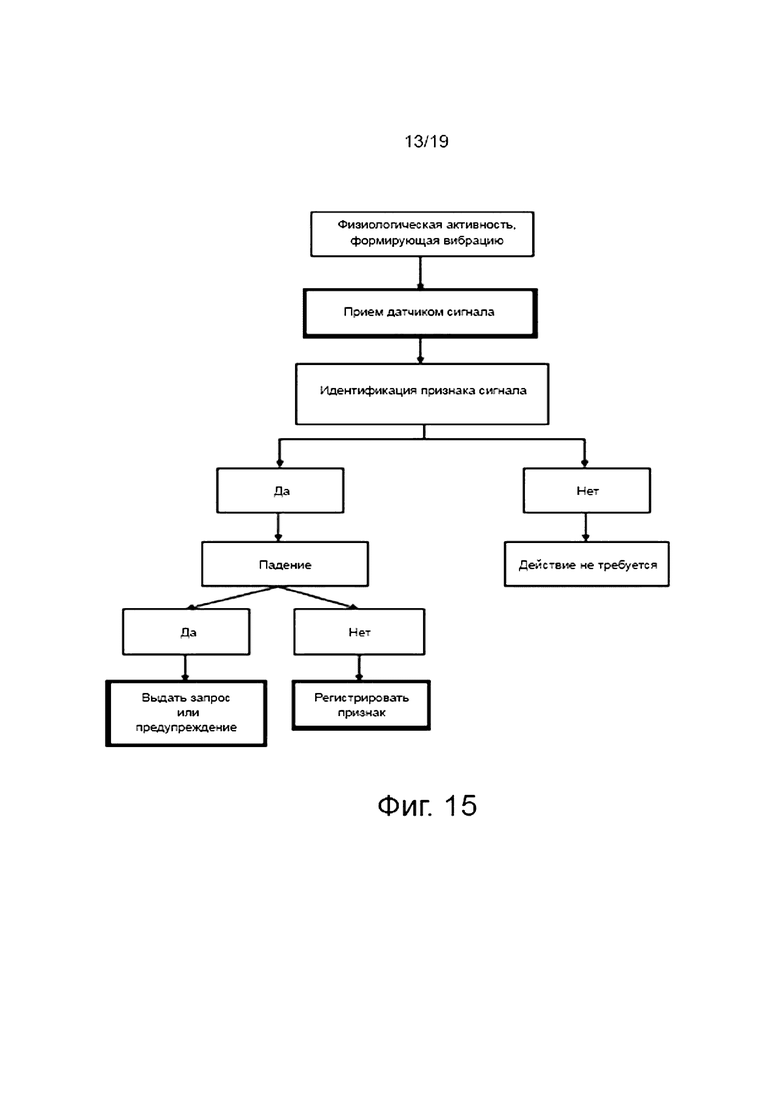
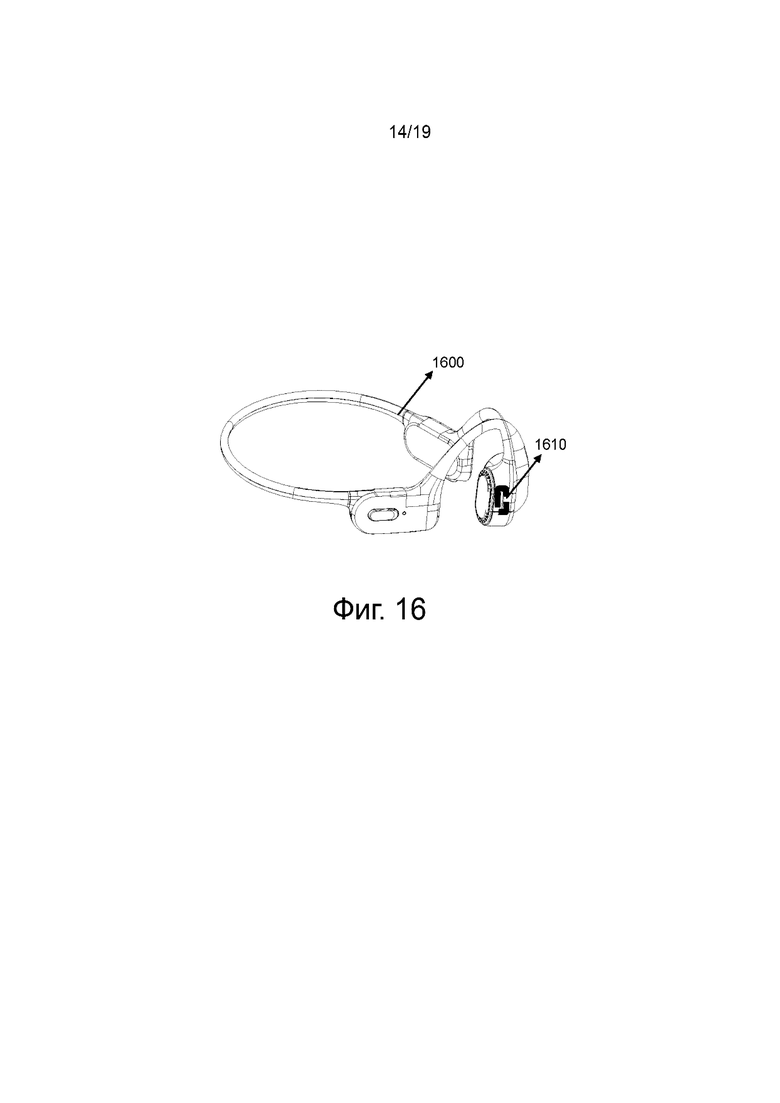
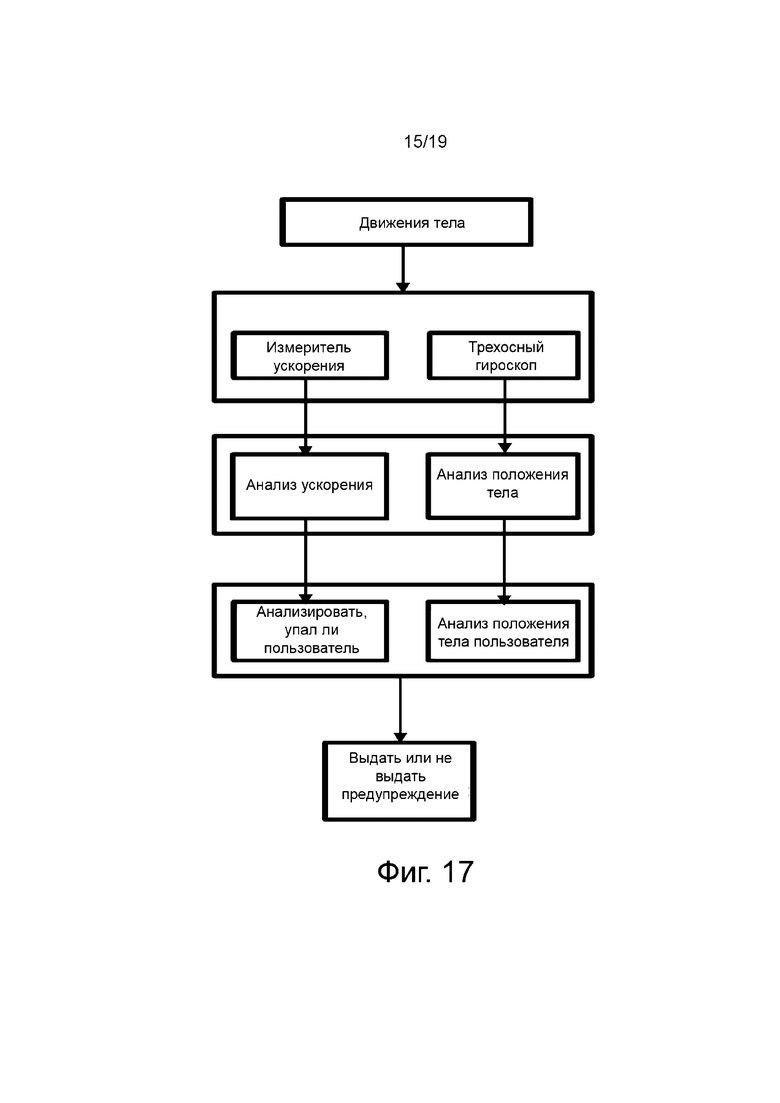
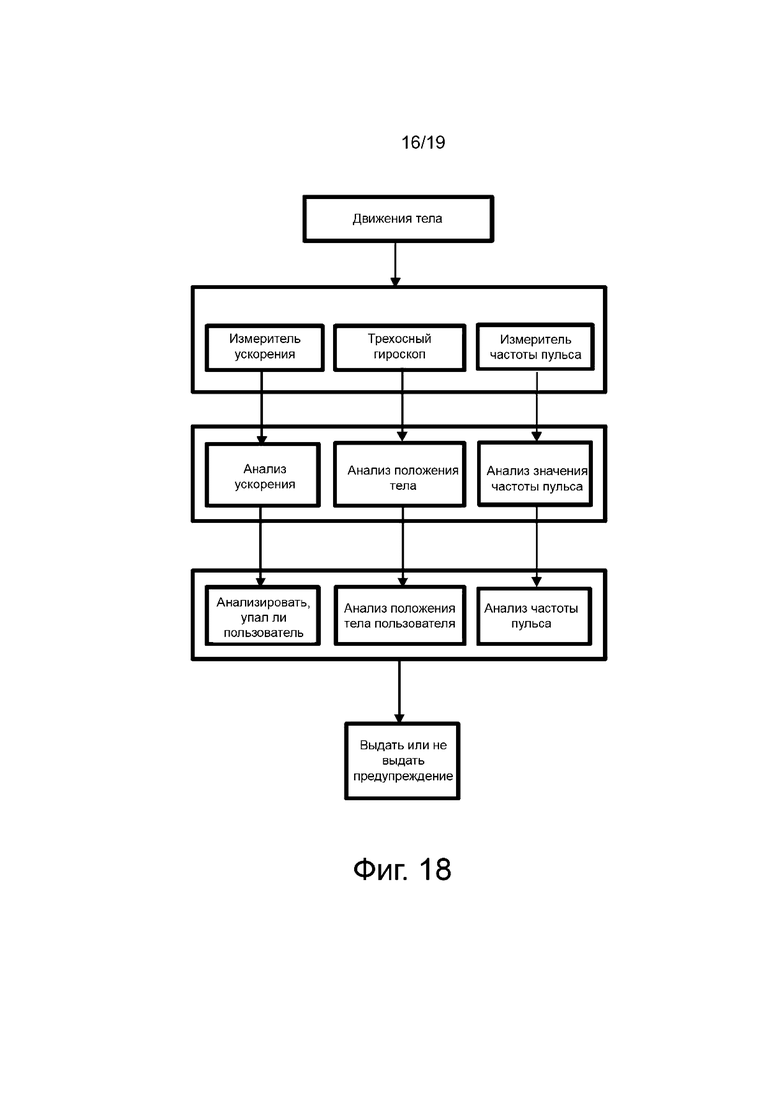
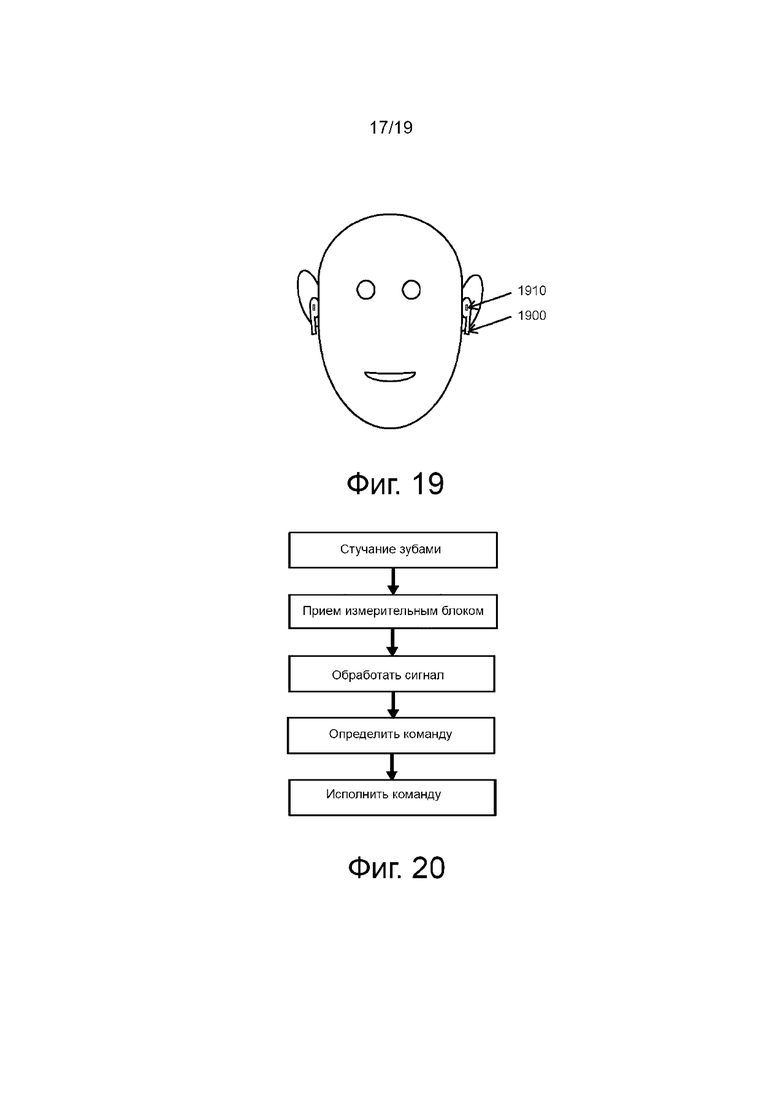
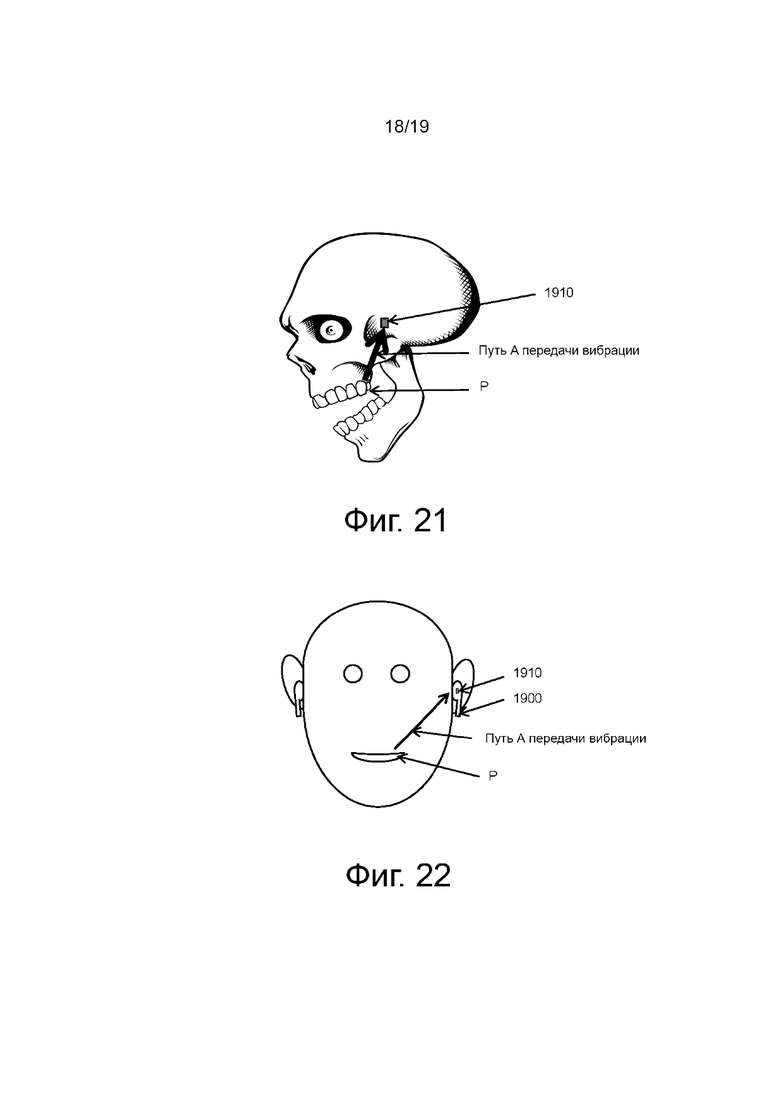
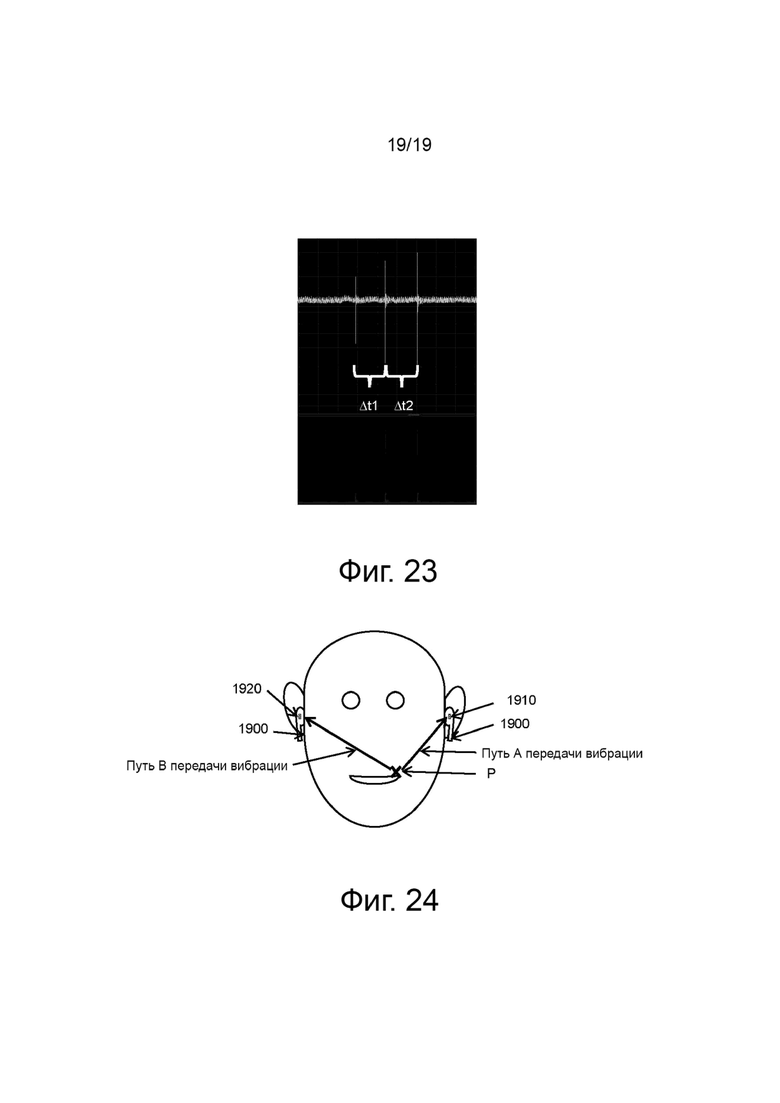
Изобретение относится к средствам управления оконечным устройством. Техническим результатом является уменьшение числа ошибочных операций пользователей устройства. Система для определения действия целевого объекта содержит по меньшей мере одно запоминающее устройство, выполненное с возможностью хранения компьютерных команд, и по меньшей мере один процессор, осуществляющий связь с запоминающим устройством. При исполнении компьютерных команд указанный по меньшей мере один процессор выполнен с возможностью управления системой для выполнения операций, содержащих: получение измеряемого сигнала по меньшей мере от одного датчика; идентификацию признака сигнала для измеряемого сигнала; и определение на основе признака сигнала действия целевого объекта, связанного с указанным по меньшей мере одним датчиком. При этом получение измеряемого сигнала по меньшей мере от одного датчика содержит получение первого измеряемого сигнала от указанного по меньшей мере одного датчика; определение, превышает ли первый измеряемый сигнал сигнальный порог; и в ответ на определение, что первый измеряемый сигнал превышает сигнальный порог, назначение в качестве измеряемого сигнала, у которого интервал между указанным сигналом и первым измеряемым сигналом находится в пределах диапазона порогового времени. 8 з.п. ф-лы, 24 ил.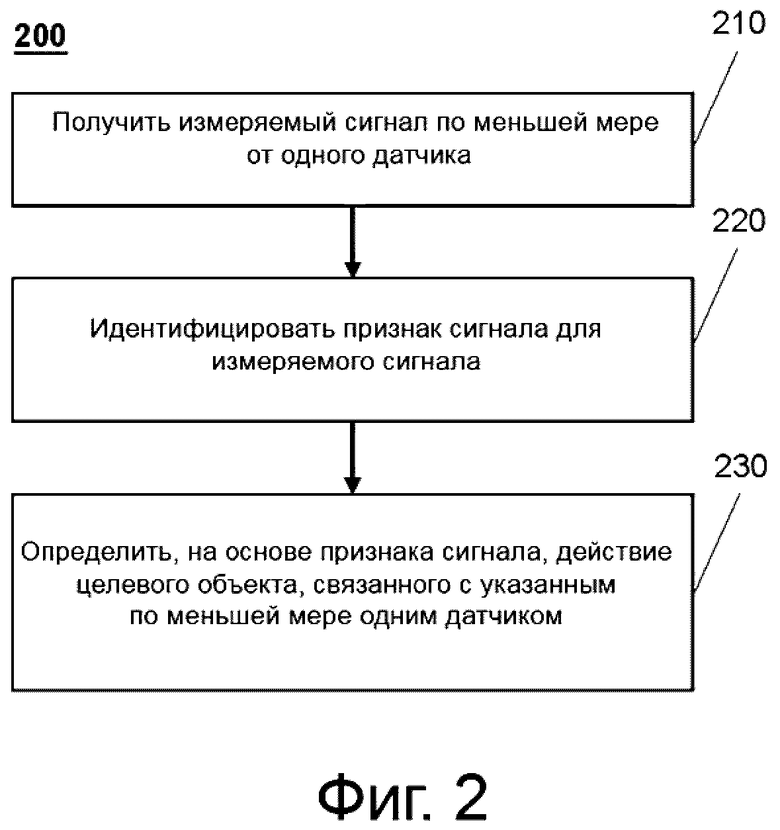
1. Система для определения действия целевого объекта, содержащая:
по меньшей мере одно запоминающее устройство, выполненное с возможностью хранения компьютерных команд; и
по меньшей мере один процессор, осуществляющий связь с запоминающим устройством, причем при исполнении компьютерных команд указанный по меньшей мере один процессор выполнен с возможностью управления системой для выполнения операций, содержащих:
получение измеряемого сигнала по меньшей мере от одного датчика;
идентификацию признака сигнала для измеряемого сигнала; и
определение на основе признака сигнала действия целевого объекта, связанного с указанным по меньшей мере одним датчиком,
при этом получение измеряемого сигнала по меньшей мере от одного датчика содержит:
получение первого измеряемого сигнала от указанного по меньшей мере одного датчика;
определение, превышает ли первый измеряемый сигнал сигнальный порог; и
в ответ на определение, что первый измеряемый сигнал превышает сигнальный порог, назначение в качестве измеряемого сигнала сигнала, у которого интервал между указанным сигналом и первым измеряемым сигналом находится в пределах диапазона порогового времени.
2. Система по п. 1, в которой указанный по меньшей мере один датчик содержит датчик вибрации.
3. Система по п. 2, в которой признак сигнала содержит по меньшей мере одно из количества пиков вибрации, мощности сигнала, временного интервала между двумя соседними пиками вибрации, частотных составляющих или длительности сигнала.
4. Система по п. 2 или 3, в которой датчик вибрации соединен с областью приема вибрации через твердую среду и выполнен с возможностью принимать сигнал вибрации, вводимый в область приема вибрации.
5. Система по п. 4, в которой сигнал вибрации вводится в область приема вибрации путем постукивания, похлопывания или скобления в области приема вибрации.
6. Система по п. 4, в которой датчик вибрации жестко соединен с твердой средой посредством по меньшей мере одного из склеивания, штамповки, сварки, клепки или винтового соединения.
7. Система по п. 2 или 3, в которой датчик вибрации расположен на носимом устройстве, причем носимое устройство прикреплено к части тела пользователя, и датчик вибрации выполнен с возможностью принимать сигнал вибрации, сформированный движением тела пользователя, через носимое устройство.
8. Система по п. 2 или 3, в которой датчик вибрации прикреплен к части тела пользователя, и датчик вибрации выполнен с возможностью принимать сигнал вибрации, сформированный движением тела пользователя.
9. Система по п. 7, в которой определение на основе признака сигнала действия целевого объекта, связанного с указанным по меньшей мере одним датчиком, содержит:
определение, на основе признака сигнала, физиологического состояния пользователя; и
определение, на основе физиологического состояния пользователя, действия целевого объекта, соответствующего физиологическому состоянию.
| CN 111768757 A, 13.10.2020 | |||
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| Способ регенерирования сульфо-кислот, употребленных при гидролизе жиров | 1924 |
|
SU2021A1 |
| CN 104814741 A, 05.08.2015 | |||
| ВВОД ЖЕСТА ПОЛЬЗОВАТЕЛЕМ НА НОСИМОМ ЭЛЕКТРОННОМ УСТРОЙСТВЕ, ВКЛЮЧАЮЩИЙ В СЕБЯ ДВИЖЕНИЕ УСТРОЙСТВА | 2013 |
|
RU2623805C2 |
| СПОСОБ УПРАВЛЕНИЯ УСТРОЙСТВОМ С ПОМОЩЬЮ ЖЕСТОВ И 3D-СЕНСОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2455676C2 |

