Область техники, к которой относится изобретение
Данное изобретение относится к измерению давления и, в частности, к использованию удаленного и пассивного датчика давления, например имплантируемого датчика давления.
Уровень техники
Измерение давления крови важно в медицине.
В последние десятилетия, например, измерение артериального давления в коронарных артериях проводным способом стало важным инструментом для оценки тяжести стеноза, например, при процедуре фракционного резерва кровотока, (FFR, англ. fractional flow reserve). Это включает в себя коронарную катетеризацию, во время которой катетер вводится в бедренную (паховая область) или в лучевую (запястье) артерии с помощью интродьюсера и проволочного направителя. При FFR используется маленький датчик на конце провода для измерения давления, температуры и потока, чтобы точно определить тяжесть поражения. Это делается во время максимального кровотока (гиперемии), который можно вызвать путем инъекции подходящих фармацевтических препаратов.
Также были предложены и коммерчески внедрены имплантируемые легочные датчики давления для измерения давления в правом отделе сердца.
Основная проблема процедуры FFR - отсутствие действительного беспроводного решения, способствующего быстрому рабочему процессу. Кроме того, хотелось бы иметь более одного датчика на проволочном направителе, и было бы полезно, если бы имелась возможность точной локализации датчиков.
В случае других применений, например, для мониторинга давления при аневризмах, достаточно маленького беспроводного технического решения также пока нет.
Один из беспроводных подходов включает в себя использование индукционных катушек как части имплантируемого датчика для установления связи с внешним контроллером. Эти катушки должны иметь диаметр около 1 мм, и по этой причине они слишком велики для некоторых типов доставки и мест имплантации.
Также были предложены датчики на основе ультразвука, но они не работают во всех частях тела (например, в легких), и для считывания данных необходим прямой контакт с кожей, что часто не реализуемо на практике.
В статье И Лим Тан (Ее Lim Tan) и др., «Разработка, изготовление и реализация беспроводного пассивного имплантируемого датчика давления на основе магнитных гармонических полей высокого порядка (Design, Fabrication, and Implementation of a Wireless Passive Implantable Pressure Sensor Based on Magnetic Higher-Order Harmonic Fields)», Биодатчики, 2011, 1, 134-152, ISSN 2079-6374, раскрывается датчик давления, использующий магнитомягкий материал и полоску из постоянных магнитов для создания магнитной сигнатуры, которая зависит от разделения двух элементов. Разделение изменяется за счет воспринимаемого давления. Это создает слабый сигнал (в результате фактора размагничивания) и, следовательно, его сложно миниатюризировать.
Остается потребность в миниатюрном беспроводном решении для удаленного пассивного измерения давления.
Сущность изобретения
Изобретение определяется формулой изобретения.
Согласно примерам, соответствующим одному из аспектов изобретения, обеспечен беспроводной датчик давления, содержащий:
закрытую камеру, содержащую по меньшей мере одну мембрану, образующую часть внешней стенки камеры;
первый постоянный магнит, расположенный внутри камеры и соединенный по меньшей мере с одной мембраной; и
второй постоянный магнит, расположенный внутри камеры,
причем по меньшей мере один из первого и второго постоянных магнитов выполнен с возможностью совершать вращательное движение вокруг оси вращения, при этом по меньшей мере часть магнитного момента ориентирована перпендикулярно оси вращения.
Этот датчик давления содержит два постоянных магнита, при этом по меньшей мере один является подвижным, чтобы совершать вращение. Расстояние разделения между двумя постоянными магнитами является функцией внешнего давления (т.е. внешнего относительно камеры), так как это деформирует мембрану, которая, в свою очередь, перемещает два постоянных магнита относительно друг друга. Может иметься только одна мембрана, с которой соединен первый постоянный магнит, но вместо этого могут иметься две мембраны, каждая из которых соединена с соответствующим постоянным магнитом.
Во всех случаях расстояние разделения изменяется из-за отклонения мембран, и это влияет на способ взаимодействия их магнитных полей и, следовательно, влияет на магнитомеханическую резонансную частоту. Таким образом, давление можно измерять на основании компонентов резонансной частоты в регистрируемом магнитном поле, в частности, вызванном вращательными колебательными движениями незакрепленного постоянного магнита.
Этот подход к измерению, основанный на вращательных колебаниях, обеспечивает работу с высокой чувствительностью, а также позволяет миниатюризировать датчик, например, для применения в качестве имплантируемого датчика с дистанционным считыванием данных.
В одной из компоновок один из первого и второго постоянных магнитов может совершать вращательное движение, а другой из первого и второго постоянных магнитов неподвижен. Это означает, что имеется только одна подвижная деталь. Однако предусмотрена возможность перемещения обоих постоянных магнитов, при этом результирующее влияние на генерируемое магнитное поле по-прежнему будет регистрируемым.
Два постоянных магнита выравниваются, при этом, например, их полюса являются противоположно направленными, а именно - в стабильном состоянии, которое затем нарушается внешним полем. Это означает, что два магнита притягиваются друг к другу.
Подвижный постоянный магнит совершает вращательные колебания в магнитном поле другого постоянного магнита. Местное магнитное поле зависит от близости магнитов, что затем определяет резонансную частоту колебаний.
Отметим, что этот датчик давления - только удаленная часть всей системы. Возбуждение с резонансом и считывание осуществляется отдельным удаленным устройством.
Мембрана, например, выполнена из эластомера или структурированного металлического листа. В ответ на внешнее давление она деформируется, изменяя расстояние разделения.
Камера может быть цилиндром, при этом мембрана образует один торец цилиндра, или мембрана может находиться на каждом торце цилиндра.
Цилиндр особенно подходит для миниатюрного датчика, например, для прохождения по каналу, такому как кровеносный сосуд.
Указанный по меньшей мере один из первого и второго постоянных магнитов может иметь осесимметричную форму, такую как сфера или цилиндр. Таким образом, вращение не вызывает физической вибрации. Оба постоянных магнита могут иметь одинаковую форму или они могут различаться. Сферический магнит является предпочтительным, поскольку его легко изготовить с требуемыми размерами и допусками.
Внутрь цилиндра указанный по меньшей мере один из первого и второго постоянных магнитов вставлен с окружением пространством, так что он колеблется в пространстве без фрикционного контакта с поверхностью. По меньшей мере один из первого и второго постоянных магнитов вынужден вращаться из-за сил притяжения между двумя магнитами. Таким образом, движение постоянных магнитов не требует, чтобы датчик занимал дополнительное пространство.
Второй постоянный магнит, например, соединен с камерой посредством жесткого соединения, а первый постоянный магнит соединен с мембраной посредством проволоки или нити.
Эта проволока или нить, например, за счет магнитной силы притяжения удерживается натянутой между двумя постоянными магнитами. Эта сила, например, на один или более порядков больше, чем сила тяжести. Таким образом, датчик может работать в любой ориентации. Проволока или нить будут удерживаться под растягивающей нагрузкой магнитными силами. Эти силы также центрируют по меньшей мере один из первого и второго постоянных магнитов и, таким образом, обеспечивают вращение вокруг неподвижной оси.
Первый постоянный магнит, например, приклеен внутрь цилиндра, тогда как второй постоянный магнит подвешен на проволоке или нити. Проволока или нить обеспечивает фиксированное расстояние между мембраной и вторым постоянным магнитом, потому что она остается натянутой, но может закручиваться, чтобы обеспечивать резонансные колебания. Отметим, что в альтернативной компоновке постоянный магнит, связанный с мембраной, может быть неподвижным, а постоянный магнит, связанный с камерой, может свободно вращаться.
Датчик, например, имеет внешнюю форму, обеспечивающую возможность его установки в цилиндр с диаметром 1 мм, например, с диаметром 0,5 мм, например, с диаметром 0,3 мм.
Такие уровни миниатюризации делают устройство особенно подходящим для имплантации в тело.
Изобретение также обеспечивает систему измерения давления, содержащую:
датчик давления, как раскрыто выше;
компоновку катушек возбуждения для беспроводного индуцирования резонансных вращательных колебаний по меньшей мере одного из первого и второго постоянных магнитов путем генерирования магнитного поля.
Общая система имеет систему внешнего возбуждения. Она может представлять собой катушку, окружающую датчик давления (например, окружающую часть тела пациента, в которую имплантирован датчик давления), или просто размещаемую на теле, или катушки для размещения с каждой стороны датчика давления. Местоположение имплантированного датчика давления может быть определено, например, посредством рентгеновского излучения, но вместо этого оно может быть определено на основании самого измерения.
Внешняя катушка (или катушки) генерирует осциллирующие магнитные поля с низкой напряженностью для возбуждения вращательных механических колебаний.
Система может дополнительно содержать контроллер, выполненный с возможностью:
управления компоновкой катушек возбуждения для индуцирования и поддержания резонансных колебаний другого магнита из первого и второго постоянных магнитов; и
измерения магнитного поля, изменяемого резонансными колебаниями.
Таким образом, можно обнаруживать резонансные колебания, при этом их частота коррелирует с воспринимаемым давлением.
Контроллер может быть выполнен с возможностью управления компоновкой катушек возбуждения, чтобы индуцировать и поддерживать резонансные колебания за счет применения прерывистого внешнего магнитного поля.
Таким образом, резонансные колебания поддерживают, чтобы преодолевать фрикционные и другие потери, которые в противном случае гасили бы колебания.
Контроллер может быть выполнен с возможностью измерения магнитного поля между активными периодами прерывистого внешнего поля, или во время активных периодов прерывистого внешнего поля, или во время непрерывного внешнего поля. Таким образом, может иметь место повторяющаяся последовательность возбуждения и измерения или же одновременное возбуждение и измерение.
Компоновка катушек возбуждения может содержать по меньшей мере 3 неколлинеарные катушки для индуцирования и поддержания резонансных колебаний и по меньшей мере 3 неколлинеарные катушки для измерения магнитного поля. Таким образом, использование множества катушек гарантирует, что допустимой может быть любая ориентация датчика давления относительно поля возбуждения.
Контроллер может быть выполнен с возможностью использования одной и той же катушки или одних и тех же катушек для индуцирования резонансных колебаний, что и для измерения магнитного поля. Это обеспечивает низкую стоимость комплекта оборудования. Конечно, при необходимости можно использовать отдельные катушки.
Система может содержать множество датчиков давления, каждый с разными резонансными частотами.
Они могут использоваться для измерения давления в нескольких местах, и различные места могут быть идентифицированы на основе известного диапазона резонансных частот, которые они создают.
Изобретение также обеспечивает систему катетера или проволочного направителя, содержащую:
катетер или проволочный направитель; и
систему, как раскрыто выше, в которой на катетере или проволочном направителе предусмотрен датчик давления.
Может иметься один датчик давления, расположенный на конце, или может быть иметься множество датчиков давления, расположенных вдоль катетера или проволочного направителя.
Изобретение также обеспечивает способ измерения давления, включающий в себя следующее:
используют компоновку катушек возбуждения, чтобы беспроводным образом возбуждать в датчике давления резонансные колебания, причем датчик давления содержит:
закрытую камеру, содержащую по меньшей мере одну мембрану, образующую часть внешней стенки камеры;
первый постоянный магнит, расположенный внутри камеры и соединенный по меньшей мере с одной мембраной;
второй постоянный магнит, расположенный внутри камеры, причем по меньшей мере один из первого и второго постоянных магнитов может совершать вращательное движение вокруг оси вращения, при этом по меньшей мере часть магнитного момента ориентирована перпендикулярно оси вращения, один из постоянных магнитов является возбуждаемым в резонансные колебания;
измеряют магнитное поле, изменяемое резонансными колебаниями; и определяют давление по частоте изменения измеряемого магнитного поля.
Эти и другие аспекты изобретения будут очевидны и объяснены со ссылкой на вариант (варианты) осуществления, раскрываемые ниже.
Краткое описание чертежей
Для лучшего понимания изобретения и более ясного представления того, как его можно реализовать на практике, рассмотрим теперь, только в качестве примера, прилагаемые чертежи, на которых:
на фиг.1 показана система измерения давления;
на фиг.2 более подробно показан датчик давления;
на фиг.3 показано устройство, объединяющее компоновку катушек возбуждения, рентгеновскую систему и стол пациента.
на фиг.4 показан первый пример возможной компоновки катушек возбуждения.
на фиг.5 показан второй пример возможной компоновки катушек возбуждения.
на фиг.6 показан третий пример возможной компоновки катушек возбуждения, и
на фиг.7 показан способ измерения давления.
Осуществление изобретения
Изобретение будет раскрыто с рассмотрением чертежей.
Следует понимать, что подробное описание и конкретные примеры, раскрывающие примерные варианты осуществления устройства, систем и способов, предназначены только для иллюстративных целей и не предназначены для ограничения объема изобретения. Эти и другие признаки, аспекты и преимущества устройства, систем и способов согласно настоящему изобретению станут более понятными из последующего описания, прилагаемой формулы изобретения и сопроводительных чертежей. Следует понимать, что чертежи являются схематичными и выполнены не в масштабе. Также следует понимать, что одни и те же ссылочные позиции используются на чертежах для обозначения одинаковых или подобных деталей.
Изобретением обеспечен беспроводной датчик давления, содержащий два постоянных магнита. По меньшей мере один может свободно колебаться во вращательном движении. Колебания происходят на резонансной частоте, которая является функцией воспринимаемого давления, влияющего на расстояние между двумя постоянными магнитами. Эту частоту колебаний можно измерить дистанционно.
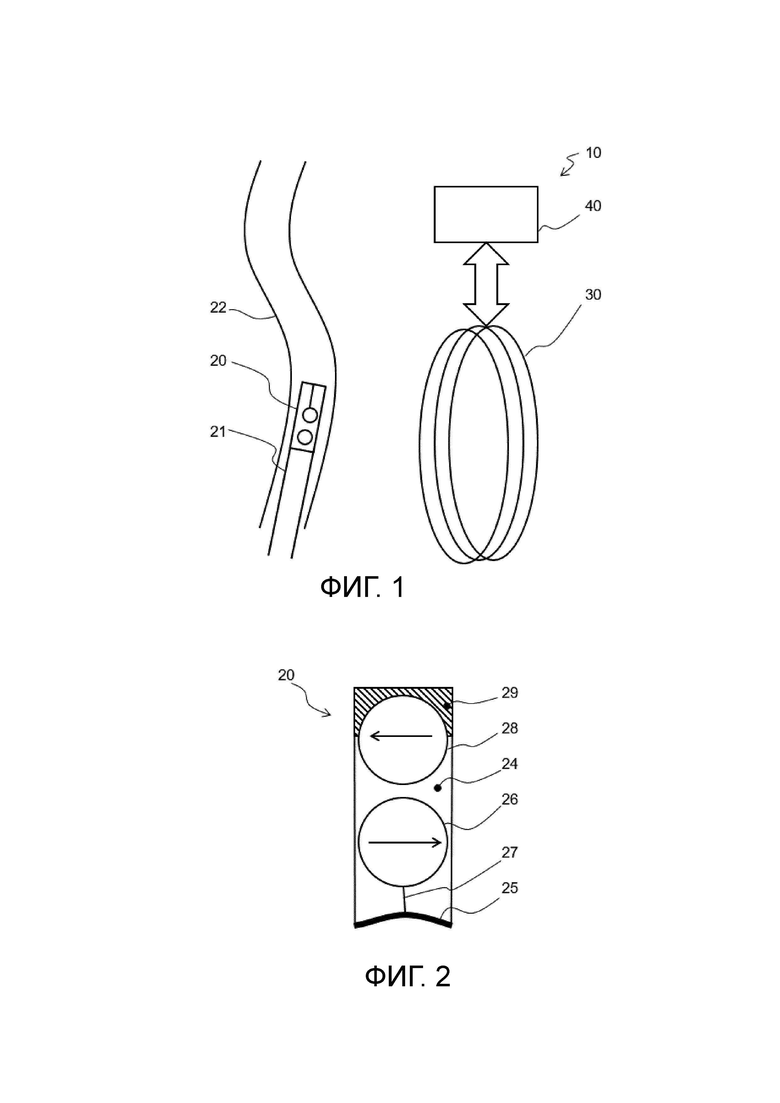
На фиг.1 показана система 10 измерения давления, содержащая датчик 20 давления, который воспринимает местное давление. Датчик 20 давления является беспроводным и не требует местного источника питания. Он модулирует генерируемое магнитное поле в зависимости от воспринимаемого давления. В частности, он входит в состояние механического резонансного колебания, вызванного внешним электромагнитным полем, и этот механический резонанс может быть обнаружен по его влиянию на магнитное поле, создаваемое самим датчиком 20. Датчик 20 давления в этом примере находится на конце стержня 21 для медицинского вмешательства, то есть катетера или проволочного направителя. Это может быть каким-либо положением вдоль стержня или, фактически, вдоль стержня может находиться несколько датчиков давления. Вместо этого датчик давления может быть постоянно имплантированным устройством, например, частью агента или медицинской спирали.
Система 10 имеет компоновку 30 катушек возбуждения для беспроводного создания магнитно-индуцированного механического резонанса.
Компоновка катушек возбуждения может являться одной катушкой (что означает один или множество отдельных витков, но все они расположены параллельно друг другу и вокруг общей оси), или она может быть множеством катушек с параллельной или непараллельной ориентацией.
На фиг.1 схематично показана компоновка 30 катушек возбуждения сбоку от датчика 20 давления. Вместо этого она может окружать датчик давления (например, окружать часть тела пациента, в которую имплантирован датчик давления). Катушек может быть более одной, при этом все катушки расположены и намотаны в одной плоскости, образуя массив. Этот массив катушек может быть размещен под пациентом (например, пациент лежит на плоской конструкции). Однако существует множество способов размещения системы катушек возбуждения. Другой пример - использование катушек, намотанных на магнитомягкие (ферритовые) стержни, расположенные сбоку (по бокам) от пациента.
Требуемый размер внешней катушки зависит от используемой технологии. Общий диаметр массива плоских катушек может, например, иметь тот же порядок величины, что и максимальное расстояние измерения. Катушки меньшего размера требуют большей мощности и, возможно, приемного усилителя с меньшим шумом. Катушки, в которых используется сердечник из магнитомягкого материала, могут быть намного меньше в диаметре. Например, каждая катушка может иметь диаметр около одной десятой максимального расстояния.
Чтобы активировать компоновку 30 катушек возбуждения для создания переменного электромагнитного поля, используют контроллер 40. Кроме того, контроллер анализирует обнаруженное магнитное поле, в частности, для определения механической резонансной частоты датчика давления, которая зависит от воспринимаемого местного давления.
В типовом (но не единственно возможном) применении датчик 20 давления имплантируют в сосуд 22 или орган субъекта. Чтобы разместить датчик давления в требуемом месте, местоположение можно идентифицировать и отслеживать с помощью систем визуализации, таких как рентген. Компоновку катушек возбуждения можно разместить в соответствующем месте. Альтернативно, датчик давления может быть перемещен в требуемое место на основании регистрации внешней катушкой 30 положения магнитного поля, создаваемого датчиком 20 давления.
Контроллер 40 использует внешнюю катушку 30 (или катушки) для генерирования колебательных полей малой напряженности для возбуждения резонанса, а также для поддержания резонансных колебаний. В примере на фиг.1 эта же компоновка катушек возбуждения используется для измерения магнитного поля, изменяемого резонансными колебаниями. Альтернативно можно использовать отдельную катушку или катушки для обнаружения изменяемого магнитного поля, генерируемого колебаниями.
Контроллер может индуцировать и поддерживать резонансные колебания, прикладывая импульсное переменное поле, и может измерять магнитное поле между импульсами. Таким образом, возникает последовательность возбуждения и измерения.
На фиг.2 более подробно показан пример датчика 20 давления.
Он содержит закрытую камеру 24, образованную металлическим или полимерным корпусом. Часть внешней стенки камеры образует деформируемая мембрана 25. Она может представлять собой, например, эластомер или структурированную металлическую фольгу. Камера заполнена газом (например, воздухом) или вакууммирована.
В представленном примере камера представляет собой цилиндр, а мембрана 25 образует торцевую стенку. В альтернативном примере обе торцевые стенки могут быть образованы мембраной, при этом две мембраны смещаются вовнутрь по направлению друг к другу в ответ на повышение внешнего давления.
Наружный диаметр цилиндра и, следовательно, датчика, может составлять меньше 0,3 мм, например - 0,2 мм, обычно - меньше 1 мм, а предпочтительно - меньше 0,5 мм. В более общем случае (и независимо от конкретной формы) датчик давления может вставляться в цилиндр с внутренним диаметром, указанным выше. Затем датчик давления может быть интегрирован в постоянный имплантат, такой как стент или спираль для аневризмы, или временный имплантат, такой как проволочный направитель или катетер, или он может быть доставлен автономно, например, посредством кровотока, чтобы попасть в легкое.
Датчик давления имеет длину, например, от 1 мм до 5 мм.
Первый постоянный магнит 26 соединен с мембраной удлиненным элементом 27 (например, проволокой или нитью). Второй постоянный магнит 28 соединен с внутренней областью камеры, в частности соединен с закрытым концом, противоположным мембране 25. Второй постоянный магнит прикреплен, например, с помощью клея 29. Таким образом, в этом конкретном примере второй постоянный магнит является статическим (относительно неподвижных частей камеры).
Постоянные магниты могут быть сферами, при этом по меньшей мере первый постоянный магнит 26 помещается внутри камеры с зазором со всех сторон. Неподвижный второй постоянный магнит 28 вместе с удлиненным элементом 27 автоматически центрирует вращающийся первый постоянный магнит 26 в устройстве. Таким образом, вращающийся магнит никогда не касается внутренней стороны корпуса. Это обеспечивает высококачественные условия колебаний.
Ось вращения соответствует удлиненной оси проволоки или нити, которая проходит вдоль направления длины камеры. По меньшей мере часть магнитного момента подвижного постоянного магнита 26 ориентирована перпендикулярно оси вращения. Таким образом, магнитная сила, испытываемая магнитом 26, может индуцировать вращающий момент вокруг оси вращения. В представленном примере постоянные магниты представляют собой дипольные магниты, магнитные моменты которых полностью перпендикулярны оси вращения. Как показано, магнитные силы обеспечивают выравнивание магнитов по оси вращения с противоположно направленными магнитными моментами. Притяжение между постоянными магнитами удерживает удлиненный элемент 27 в натянутом состоянии, поэтому удлиненный элемент может быть проволокой или нитью из материала, демонстрирующего податливость.
Могут использоваться магниты иной формы, такие как цилиндрические магниты или фактически другой формы. Подвижный первый магнит предпочтительно имеет осесимметричную форму относительно оси вращения, так что вращение является уравновешенным. Преимущество показанных сферических магнитов состоит в том, что их можно легко изготавливать с высокой точностью и, следовательно, они легко доступны.
Два постоянных магнита не обязательно должны быть одинакового размера, формы или типа. По существу, неподвижный постоянный магнит используется для создания статического поля, с которым взаимодействует поле подвижного постоянного магнита. Подвижный постоянный магнит используется для создания вращательных колебаний и, таким образом, вращающееся поле взаимодействует со стационарным полем неподвижного постоянного магнита.
Два постоянных магнита выровнены противоположно, то есть смежными друг с другом являются пары полюсов север-юг и юг-север. Вращательная жесткость удлиненного элемента (проволоки или нити) может быть выбрана низкой по сравнению с кручением из-за магнитного поля. Между двумя магнитами существует сильное притяжение, и поэтому к проволоке или нити прикладывается напряжение в направлении проволоки или нити. Магнитная сила обычно в несколько сотен раз больше силы тяжести. Таким образом, проволока или нить не нуждается в значительной жесткости и может, например, быть очень тонкой нитью из сверхвысокомолекулярного полиэтилена (UHMWPE, англ. Ultra High Molecular Weight Polyethylene). Это также означает, что датчик может работать в любой ориентации, поскольку влияние силы тяжести на показания датчика является пренебрежимо малым.
В представленном примере второй постоянный магнит 28 соединен с фиксированным, статическим угловым положением, а первый постоянный магнит 26 соединен с удлиненным элементом, демонстрирующим податливость (например, проволокой или нитью), который допускает возможность углового вращательного движения.
Расстояние разделения между двумя магнитами является функцией внешнего давления (т.е. внешнего по отношению к камере), поскольку это деформирует мембрану 25, которая, в свою очередь, перемещает два постоянных магнита относительно друг друга. Расстояние между постоянным магнитом 26 и мембраной 25 фиксируется удлиненным элементом (проволокой или нитью), который удерживается в натянутом состоянии за счет магнитного притяжения между двумя магнитами.
Постоянный магнит 26 способен вращаться, в частности, вокруг оси, определяемой проволокой или нитью 27. Проволока или нить могут быть достаточно тонкими, чтобы крутящие моменты на постоянном магните 26 из-за кручения проволоки или нити могли быть меньше, чем крутящие моменты, испытываемые из-за магнитных сил. Однако это не является существенным. Более жесткая проволока или нить сместит резонансную частоту колебаний к более высокому значению, и, следовательно, регистрируемый сигнал будет иметь более высокую частоту, что может легче обрабатываться. Однако более высокочастотный сигнал даст меньшее изменение частоты на единицу изменения давления.
Резонансная частота примерно обратно пропорциональна линейному размеру резонирующего тела. Следовательно, для устройства диаметром 1 мм резонансная частота составит приблизительно 500 Гц, тогда как для устройства диаметром 0,2 мм частота составит приблизительно 2,5 кГц.
Резонансные вращательные колебания запускаются подходящими электромагнитными импульсами, генерируемыми компоновкой 30 катушек возбуждения.
Может использоваться сигнал возбуждения с выбранной частотой, которая зависит от резонансной частоты, если она приблизительно известна заранее. Альтернативно, колебания можно запустить с помощью одного короткого импульса возбуждения. Это запускает колебания, которые можно зарегистрировать. Затем можно измерить резонансную частоту, а затем можно синхронизировать следующие импульсы таким образом, чтобы амплитуда колебаний увеличивалась.
Альтернативный подход заключается в том, чтобы запустить колебания с помощью длинной последовательности импульсов, которые имеют узкий частотный спектр. Центральную частоту затем можно изменять до тех пор, пока резонанс не будет достаточно хорошо удовлетворяться для приема сигнала от датчика. Затем частоту можно отслеживать. Изменяя длину последовательности импульсов, можно изменять спектральную селективность. Преимущество длинной (спектрально-селективной) последовательности импульсов состоит в том, что для приведения датчика в резонанс требуется меньшая амплитуда магнитного поля. Следовательно, это требует меньших технических затрат на систему передачи/приема и/или может обнаруживать датчик на большем расстоянии от катушки.
Недостатком использования спектрально-селективных импульсов является то, что поиск датчика в среднем занимает больше времени.
Таким образом, можно использовать серию импульсов для поддержания резонансных колебаний. Эта серия импульсов затем индуцирует и поддерживает резонансные колебания с прерывистым внешним магнитным полем. Импульсы, используемые для поддержания колебаний, например, имеют длительность, составляющую не менее 1/8 периода колебаний, т.е. 0,25 мс для сферы размером 1 мм (500 Гц) и 0,05 мс для сферы 0,2 мм (2,5 кГц). Импульсы можно было бы сделать еще короче, увеличив амплитуду.
Продолжительность колебаний может составлять, например, порядка секунд, например, 2 секунды. Следовательно, максимальное разделение импульсов возбуждения составляет приблизительно 1 секунду. В принципе, продолжительность может быть намного больше, составляя десятки или даже сотни секунд, а промежуток между импульсами возбуждения может быть адаптирован соответствующим образом, при максимальном промежутке, составляющем порядка половины продолжительности колебаний. Однако предпочтительно реализовывать много возбуждений в секунду, чтобы поддерживать резонансный отклик по существу с постоянной амплитудой.
Например, может потребоваться измерять давление примерно 10 раз в секунду, поэтому целесообразно использовать 10 последовательностей возбуждения в секунду. Например, может потребоваться, чтобы устройства меньшего размера выполняли 50 или более измерений в секунду, и тогда было бы предпочтительно обеспечить большее число возбуждений в секунду. Возбуждение может быть предусмотрено для каждого считываемого сигнала, чтобы считывание выполнялось в одной и той же точке на протяжении колебаний, но это не является обязательным. Между периодом возбуждения и периодом считывания сигнала может иметься любое соотношение.
Использование прерывистого сигнала возбуждения обеспечивает последовательное возбуждение и считывание данных. Таким образом, как только начинается вращательное колебание первого постоянного магнита 26, последующие импульсы поля синхронизируются таким образом, чтобы усилить колебание. Колеблющееся магнитное поле, генерируемое датчиком, измеряется между передаваемыми импульсами возбуждения.
Однако, также возможно одновременное возбуждение и считывание, и в этом случае можно использовать непрерывный сигнал возбуждения. Для этого требуется более сложная система приемника.
В частности, чтобы облегчить одновременное измерение сигнала при обеспечении возбуждения, сигнал, генерируемый в приемнике в ответ на сам сигнал возбуждения, должен быть минимизирован. Это может быть достигнуто путем сочетания аналогового вычитания переданного (отправляемого) сигнала на приемнике (например, за счет использования трансформатора перед приемником, в который попадает часть отправляемого сигнала) и цифрового вычитания. На этапе цифрового вычитания остаточный сигнал отправки в приемнике сначала характеризуется, а затем вычитается цифровым образом из принятого оцифрованного сигнала.
Таким образом, существуют различные способы ввести датчик в резонансные колебания.
Также, в магнитном поле, генерируемом парой магнитов, можно разными способами выполнить измерение резонансной частоты, которая зависит от механического вращения подвижного магнита (или вращения обоих магнитов как вращающейся системы, если оба магнита подвижны). Измерение может быть выполнено той же компоновкой катушек возбуждения, что упоминалось выше, или отдельной приемной системой. Приемная система может использовать датчики магнитного поля, отличные от простых катушек, такие как феррозондовые магнитометры, но катушки уже могут обеспечивать требуемую чувствительность.
Расстояние разделения между двумя постоянными магнитами влияет на механический отклик подвижного постоянного магнита на внешнее поле, как пояснялось выше. В частности, чем ближе подвижный постоянный магнит к неподвижному постоянному магниту, тем больше сила, создаваемая магнитным полем неподвижного постоянного магнита для выравнивания подвижного постоянного магнита. Эта сила приводит к более высокой резонансной частоте механического резонанса.
Взаимодействие между двумя магнитными полями можно обнаружить, и, поскольку существует зависимость от механического движения подвижного постоянного магнита, можно обнаружить резонансную частоту.
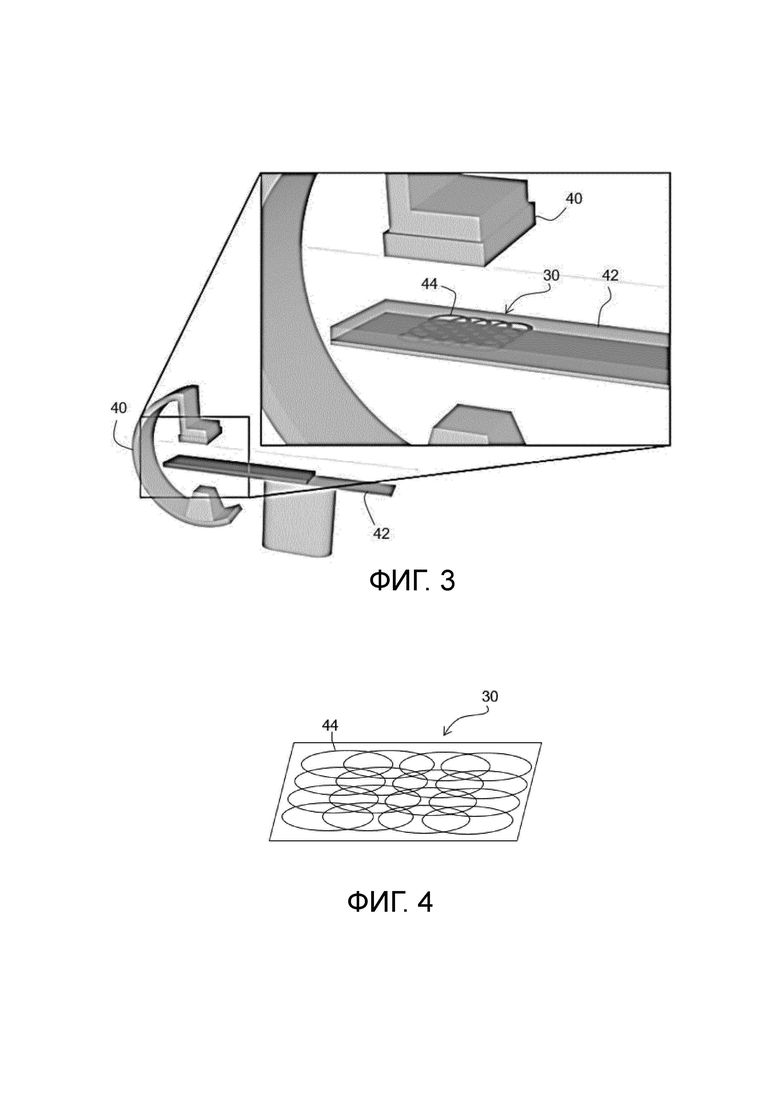
На фиг.3 показано устройство, объединяющее компоновку 30 катушек возбуждения, систему 40 визуализации (например, рентгеновское устройство с рамой С-типа) и стол 42 пациента. Датчик давления представляет собой датчик, имплантированный пациенту, который лежит на столе. Система визуализации, в данном случае - рентгеновское устройство с рамой С-типа, может использоваться для определения местоположения датчика давления.
Компоновка 30 катушек возбуждения содержит массив перекрывающихся, по существу, плоских катушек 44, образующих массив плоских катушек, встроенных в стол 42 пациента. Катушки, например, изготовлены из алюминия с общей толщиной порядка миллиметров, например, с толщиной менее 2 мм. Поглощение рентгеновского излучения от рентгеновской системы является низким.
Катушки могут содержать одиночные петли или плоские спирали, вырезанные из металлического листа. Как отмечалось выше, отдельные катушки, а также размер всей компоновки катушек разработаны с учетом необходимого магнитного поля на датчике и максимального расстояния до датчика.
На фиг.4 показан первый пример возможной компоновки катушек возбуждения, который более ясно представляет компоновку, показанную на фиг.3. Она содержит массив плоских катушек 44.
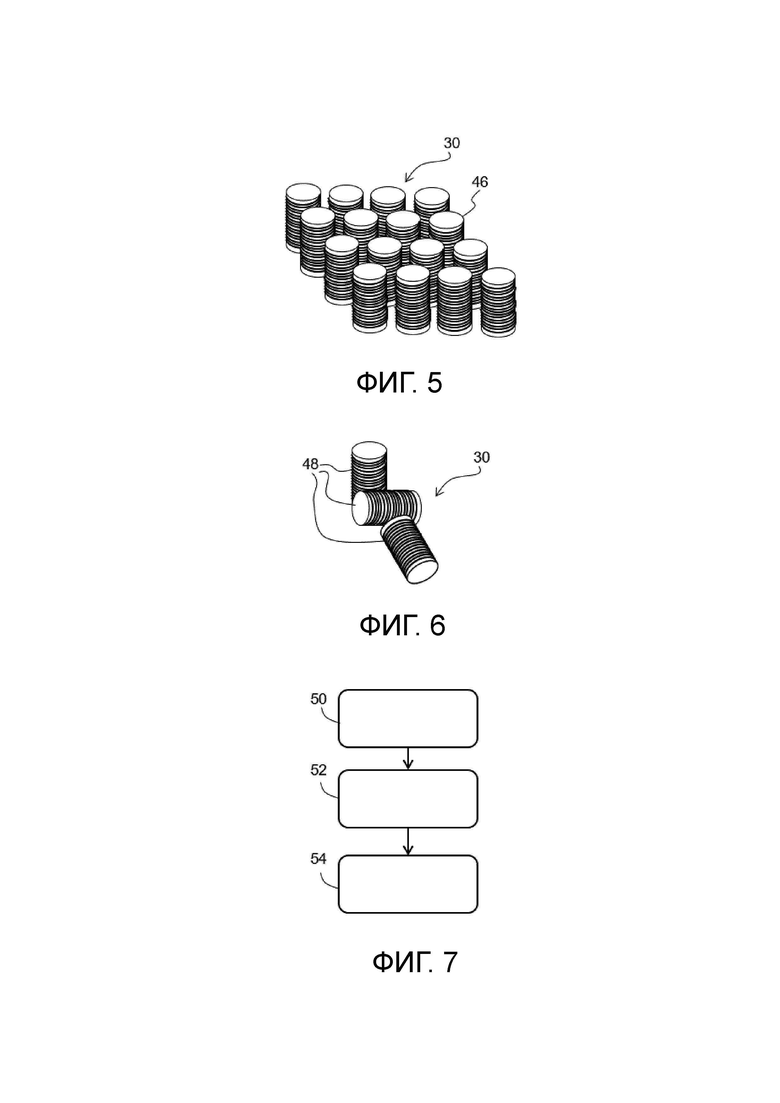
На фиг.5 показан второй пример возможной компоновки катушек возбуждения, содержащей массив цилиндрических катушек 46. Они могут содержать катушки с воздушным сердечником или катушки с ферритовым сердечником.
На фиг.6 показан третий пример возможной компоновки катушек возбуждения с тремя неколлинеарными катушками 48. В показанном примере магнитные моменты трех катушек взаимно перпендикулярны друг другу. Это повышает свободу датчика давления иметь любую ориентацию направления относительно компоновки катушек возбуждения.
Как система возбуждения, так и приемная система могут иметь по меньшей мере три генератора и приемника не колли неарного поля. Однако для многих применений, например, имплантируемых датчиков, данные которых считывают только время от времени, может быть достаточно одноосной системы, особенно если ее можно свободно ориентировать.
Таким образом, понятно, что существует множество возможных конструктивных решений для компоновки катушек возбуждения, и они будут очевидны специалистам в данной области техники.
Система может быть расширена за счет включения в нее множества датчиков. Это может обеспечить возможность измерения во множестве мест, а также может обеспечить способ восстановления положения датчика, используя относительные амплитуды в приемных системах или относительные амплитуды в системах возбуждения, необходимые для поддержания определенной амплитуды колебаний.
Множество датчиков могут работать параллельно, если они настроены на разные резонансные частоты, например за счет использования разных расстояний между постоянными магнитами или разных магнитных свойств в датчиках.
Может использоваться система с общей катушкой, например, для обеспечения синхронизации и/или формирования импульсов возбуждения таким образом, чтобы все датчики увеличивали свое энергосодержание. В идеале диапазон возможных резонансных частот для различных датчиков тогда не перекрывается, так что приемная система с катушками возбуждения и приема, находящимися в разных положениях, может различать датчики.
В приведенном выше примере мембрана прикреплена к подвижному постоянному магниту. Конечно, постоянный магнит, связанный с мембраной, вместо этого может быть неподвижен относительно мембраны, а постоянный магнит, связанный с камерой, может свободно вращаться. Как упоминалось выше, может иметься две мембраны, каждая из которых соединена с одним из постоянных магнитов, так что обе они движутся навстречу друг другу при наличии внешнего давления. Только один из двух постоянных магнитов может быть соединен со своей соответствующей мембраной таким образом, чтобы обеспечить вращательное движение, или же оба могут быть соединены для обеспечения вращательного движения, т.е. они оба могут быть соединены удлиненным элементом (проволокой или нитью) со своей соответствующей мембраной.
Изменение резонансной частоты в ответ на полный диапазон давлений, на который рассчитан датчик, например, соответствует изменению частоты с коэффициентом 2. Проволока или нить также будут влиять на крутящий момент, возникающий во время колебаний, поэтому частотная характеристика может быть более значительной в зависимости от выполнения проволоки или нити.
Требуемый диапазон давлений составляет, например, от приблизительно 800 мбар (80 кПа, абсолютное давление) до приблизительно 1300 мбар (0,13 МПа, абсолютное давление). Нижний предел, например, соответствует низкому давлению крови на большой высоте (например, в Мехико). При необходимости можно предусмотреть два (или более) конструктивных исполнения, одно - для нормальных высот, а другое - для больших высот, чтобы сузить диапазон давления и, следовательно, повысить чувствительность.
Датчик давления может быть применен к катетеру или проволочному направителю, или он может быть использован в другом применении, таком как датчики давления в легочной артерии, датчики на имплантированных клапанах, датчики давления на стентах или медицинских спиралях.
На фиг.7 показан способ измерения давления, включающий следующее:
на этапе 50 используют компоновку катушек возбуждения для беспроводного возбуждения резонансных колебаний датчика давления, раскрытого выше;
на этапе 52 измеряют магнитное поле, изменяемое резонансными колебаниями; и
на этапе 54 определяют давление по частоте изменения измеряемого магнитного поля.
Модификации раскрытых вариантов осуществления могут быть поняты и реализованы специалистами в данной области техники при практическом применении заявленного изобретения на основании изучения чертежей, описания и прилагаемой формулы изобретения. В формуле изобретения слово «содержащий» не исключает других элементов или этапов, а употребление формы единственного числа (неопределенный артикль «а» или «an» в оригинале заявки на английском языке) не исключает множественности. Один процессор или другой устройство может выполнять функции нескольких объектов, указанных в формуле изобретения. Сам факт, что конкретные признаки изложены во взаимно различных зависимых пунктах формулы изобретения, не означает, что комбинация этих признаков не может эффективно использоваться. Компьютерная программа может храниться/распространяться на подходящем носителе, таком как оптический носитель данных или твердотельный носитель, поставляемый вместе с другим оборудованием или как его часть, но также может распространяться в других формах, например, через Интернет или другие проводные или беспроводные телекоммуникационные системы. Любые ссылочные позиции в формуле изобретения не следует рассматривать как ограничивающие ее объем.
Группа изобретений относится к медицине, а именно к имплантируемому датчику давления, системе и способу измерения давления. Датчик содержит закрытую камеру, первый и второй постоянные магниты. Камера содержит мембрану. Магниты расположены внутри камеры. Первый магнит соединен с мембраной. Один из магнитов вставлен внутрь камеры с окружением пространством, так что он колеблется в пространстве без фрикционного контакта с поверхностью. Второй магнит соединен с камерой посредством жесткого соединения. Первый магнит соединен с мембраной посредством удлиненного элемента. Элемент установлен с обеспечением возможности вращения первого постоянного магнита и выполнен в виде проволоки или нити таким образом, что проволока или нить за счет магнитной силы притяжения удерживается натянутой между двумя магнитами, с обеспечением фиксированного расстояния между мембраной и вторым постоянным магнитом. Система измерения давления содержит датчик давления и компоновку катушек возбуждения для беспроводного индуцирования резонансных вращательных колебаний постоянных магнитов путем генерирования магнитного поля. В другом варианте система содержит катетер или проволочный направитель. При исполнении способа используют компоновку катушек возбуждения для беспроводного возбуждения резонансных колебаний датчика давления. Измеряют магнитное поле, изменяемое резонансными колебаниями. Определяют давление по частоте изменения измеряемого магнитного поля. Обеспечивается беспроводной имплантируемый датчик давления, выполненный с возможностью локализации на катетере или проволочном направителе. 4 н. и 11 з.п. ф-лы, 7 ил.
1. Имплантируемый датчик давления, содержащий:
закрытую камеру, содержащую по меньшей мере одну мембрану;
первый постоянный магнит, расположенный внутри камеры и соединенный по меньшей мере с одной мембраной;
и второй постоянный магнит, расположенный внутри камеры,
при этом по меньшей мере один из указанных первого и второго постоянных магнитов вставлен внутрь камеры с окружением пространством, так что он колеблется в пространстве без фрикционного контакта с поверхностью,
причем второй постоянный магнит соединен с камерой посредством жесткого соединения, а первый постоянный магнит соединен с мембраной посредством удлиненного элемента, установленного с обеспечением возможности вращения первого постоянного магнита, при этом удлиненный элемент выполнен в виде проволоки или нити таким образом, что проволока или нить за счет магнитной силы притяжения удерживается натянутой между двумя постоянными магнитами, с обеспечением фиксированного расстояния между мембраной и вторым постоянным магнитом.
2. Датчик по п. 1, в котором удлиненный элемент содержит податливый материал.
3. Датчик по п. 1 или 2, в котором мембрана изготовлена из эластомера или структурированного металлического листа.
4. Датчик по любому из пп. 1-3, в котором камера представляет собой цилиндр, и:
один торец цилиндра образован одной мембраной; или
каждый торец цилиндра образован соответствующей мембраной.
5. Датчик по п. 4, в котором один из первого и второго постоянных магнитов имеет осесимметричную форму, такую как сфера или цилиндр.
6. Датчик по любому из пп. 1-5, в котором камера является вакуумированной.
7. Датчик по любому из пп. 1-6, в котором данный датчик имеет внешнюю форму, обеспечивающую возможность его установки в камеру с диаметром 1 мм, например с диаметром 0,5 мм, например с диаметром 0,3 мм.
8. Система измерения давления с помощью имплантируемого датчика давления, содержащая:
датчик давления по любому из пп. 1-7;
компоновку катушек возбуждения для беспроводного индуцирования резонансных вращательных колебаний указанного по меньшей мере одного из первого и второго постоянных магнитов путем генерирования магнитного поля.
9. Система по п. 8, дополнительно содержащая контроллер, выполненный с возможностью:
управления компоновкой катушек возбуждения для индуцирования и поддержания резонансных колебаний указанного по меньшей мере одного из первого и второго постоянных магнитов; и
измерения магнитного поля, изменяемого резонансными колебаниями.
10. Система по п. 9, в которой контроллер выполнен с возможностью управления компоновкой катушек возбуждения для индуцирования и поддержания резонансных колебаний за счет применения прерывистого внешнего магнитного поля.
11. Система по п. 10, в которой контроллер выполнен с возможностью измерения магнитного поля между активными периодами прерывистого внешнего поля.
12. Система по любому из пп. 8-11, в которой контроллер выполнен с возможностью использования одной и той же катушки или одних и тех же катушек для индуцирования и поддержания резонансных колебаний, что и для измерения магнитного поля.
13. Система по любому из пп. 8-12, содержащая группу датчиков давления, каждый с отличными от других резонансными частотами.
14. Система измерения давления с помощью имплантируемого датчика давления, размещенного на катетере или проволочном направителе, содержащая:
катетер или проволочный направитель; и
систему по любому из пп. 8-13, в которой на катетере или проволочном направителе предусмотрен датчик давления.
15. Способ измерения давления с помощью имплантируемого датчика давления, при котором:
используют компоновку катушек возбуждения для беспроводного возбуждения резонансных колебаний датчика давления, причем датчик давления содержит:
закрытую камеру, содержащую по меньшей мере одну мембрану;
первый постоянный магнит, расположенный внутри камеры и соединенный по меньшей мере с одной мембраной;
и второй постоянный магнит, расположенный внутри камеры,
при этом по меньшей мере один из указанных первого и второго постоянных магнитов вставлен внутрь камеры с окружением пространством, так что он колеблется в пространстве без фрикционного контакта с поверхностью,
причем второй постоянный магнит соединен с камерой посредством жесткого соединения, а первый постоянный магнит соединен с мембраной посредством удлиненного элемента, установленного с обеспечением возможности вращения первого постоянного магнита, при этом удлиненный элемент выполнен в виде проволоки или нити таким образом, что проволока или нить за счет магнитной силы притяжения удерживается натянутой между двумя постоянными магнитами, с обеспечением фиксированного расстояния между мембраной и вторым постоянным магнитом, при этом по меньшей мере часть магнитного момента ориентирована перпендикулярно оси вращения, причем по меньшей мере один из постоянных магнитов является возбуждаемым в резонансные колебания;
измеряют магнитное поле, изменяемое резонансными колебаниями;
и определяют давление по частоте изменения измеряемого магнитного поля.
| RU 2011113976 A, 20.10.2012 | |||
| US 2007236213 A1, 11.10.2007 | |||
| Способ получения фотоматериалов наОСНОВЕ пОлиМЕРОВ | 1974 |
|
SU626624A1 |
| US 4026276 A, 31.05.1977 | |||
| JP 3830528 B2, 04.10.2006 | |||
| US 2007255145 A1, 01.11.2007. | |||
