ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к отслеживающей системе для маркерного устройства, прикрепленного к медицинскому устройству, соответствующему маркерному устройству, соответствующему медицинскому устройству, способу отслеживания и компьютерной программе отслеживания для отслеживания маркерного устройства.
УРОВЕНЬ ТЕХНИКИ
Инвазивные и, в частности, минимально инвазивные медицинские процедуры являются широко используемым средством для правильной оценки и/или лечения внутрисосудистых заболеваний у пациентов.
Известно, что медицинское устройство, используемое для таких процедур, отслеживают электромагнитным способом, особенно при минимально инвазивных медицинских процедурах. Однако электромагнитное отслеживание имеет недостаток, заключающийся в том, что для определения не только положения, но и ориентации медицинского устройства медицинское устройство должно быть оборудовано несколькими электромагнитными маркерными устройствами, причем каждое маркерное устройство выполнено с возможностью локализации, например, с тремя степенями свободы (degrees of freedom, DoF) или пятью степенями свободы.
Кроме того, известные электромагнитные устройства, как правило, значительно больше 1 мм. Например, электромагнитное маркерное устройство, используемое отслеживающей системой, описанной в статье В. Maxwell и др. «Validation of the Calypso Surface Beacon Transponder», Journal of Applied Clinical Medical Physics, том 17, страницы 223-234 (2016), имеет размер 8 мм.
Еще одной проблемой является невозможность зачастую считывать электромагнитные маркерные устройства с относительно большого расстояния, составляющего, например, более 30 см. Например, система, описанная в вышеупомянутой статье В. Maxwell и др., позволяет считывать маркерные устройства с расстояния около 16 см.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Поэтому целью настоящего изобретения является создание усовершенствованной отслеживающей системы и усовершенствованного маркерного устройства, соответствующего медицинского устройства, способа отслеживания и компьютерной программы для отслеживания маркерного устройства. Более конкретно, целью настоящего изобретения является создание маркерного устройства, которое имеет небольшие размеры и выполнено с возможностью точного указания положения медицинского устройства для использования во время хирургической операции на человеке, в частности, на пациенте, на котором выполняют минимально инвазивную процедуру. Еще одной целью настоящего изобретения является создание отслеживающей системы, выполненной с возможностью точного отслеживания такого маркерного устройства.
В соответствии с первым аспектом настоящего изобретения предложена отслеживающая система для отслеживания маркерного устройства, причем маркерное устройство прикреплено к медицинскому устройству, а отслеживающая система предназначена для использования в хирургии. Маркерное устройство содержит чувствительный блок, который содержит магнитный объект, обеспечивающий постоянный магнитный момент, причем чувствительный блок выполнен с возможностью преобразования внешнего магнитного или электромагнитного поля возбуждения в механическое колебание магнитного объекта. Отслеживающая система содержит генератор поля для генерирования заданного магнитного или электромагнитного поля возбуждения для индуцирования механических колебаний магнитного объекта чувствительного блока, преобразователь для преобразования магнитного или электромагнитного поля, генерируемого индуцированными механическими колебаниями магнитного объекта, в один или более электрических сигналов отклика, и блок определения положения для определения положения маркерного устройства на основе одного или более электрических сигналов отклика.
При этом генератор поля содержит массив генерирования магнитного поля, содержащий множество блоков генерирования, расположенных с заданным пространственным расположением, множество блоков генерирования выполнены с возможностью генерирования неоднородного магнитного поля, причем один или более электрических сигналов отклика указывают на характерное механическое колебание магнитного объекта чувствительного блока, индуцированное неоднородным магнитным полем, сгенерированным множеством блоков генерирования, при этом блок определения положения выполнен с возможностью определения положения маркерного устройства, по меньшей мере частично, на основе одного или более электрических сигналов отклика, указывающих характерное механическое колебание.
Соответственно, предложена отслеживающая система, которая может быть использована для отслеживания положения и/или ориентации медицинского устройства с использованием соответствующего маркерного устройства, прикрепленного к медицинскому устройству. В частности, эта отслеживающая система может быть использована для отслеживания положения и/или ориентации медицинского устройства во время хирургической операции, а именно, во время минимально инвазивной хирургии, чтобы позволить точно определять положение и/или ориентацию медицинского устройства с использованием маркерного устройства довольно небольшого размера.
Для этой цели в отслеживающей системе используют маркерное устройство, содержащее чувствительный блок с магнитным объектом, имеющим постоянный магнитный момент. В таком случае, если чувствительный блок маркерного устройства подвергают воздействию заданного внешнего магнитного или электромагнитного поля возбуждения, магнитный объект начинает колебаться в ответ на поле возбуждения. Механические колебания магнитного объекта генерируют магнитное или электромагнитное поле (отклика), которое затем преобразуется соответствующим преобразователем в один или более электрических сигналов отклика. Затем эти сигналы отклика используют для получения положения маркерного устройства. Более конкретно, механические колебания магнитного объекта, как правило, могут генерировать изменение магнитного поля в зависимости от положения, которое может быть выражено в виде сигналов отклика и использовано блоком определения положения для определения положения маркерного устройства и, следовательно, медицинского устройства, к которому прикреплено маркерное устройство.
В этом контексте термин «медицинское устройство» может, в частности, относиться к устройству, которое используют для медицинской процедуры. В частности, в некоторых вариантах реализации медицинское устройство может соответствовать устройству, используемому во время хирургической операции, например минимально инвазивной хирургии. В некоторых вариантах реализации под медицинским устройством может пониматься инвазивный инструмент, который используют для интервенционных процедур, выполняемых на человеке, в частности на пациенте.
В целом, подход к определению положения с помощью отслеживающей системы и маркерного устройства, как предложено в настоящем документе, может быть использован для любого медицинского устройства, для которого целесообразно выполнять определение положения/локализацию. В силу этого в некоторых вариантах реализации термин «медицинское устройство» может быть также использован для любого другого медицинского устройства, для которого может быть полезна локализация. В качестве примера следует упомянуть повязку или пластырь. В таких случаях отслеживание положения и/или ориентации такого рода повязок или пластырей может быть важным по причинам безопасности, например, после хирургической операции, для гарантирования того, чтобы все было размещено или удалено надлежащим образом (если требуется).
Термин «маркерное устройство» может быть использован, в частности, для ссылки на любое устройство, выполненное с возможностью указания положения и/или ориентации объекта, к которому прикреплено маркерное устройство. В частности, термин «маркерное устройство» может относиться к устройству, содержащему магниточувствительный воспринимающий блок, т.е. чувствительный блок, содержащий магнитный объект, который реагирует на магнитное или электромагнитное поле возбуждения совершением соответствующих механических колебаний, в частности, вращательных колебаний. Эти механические колебания используются отслеживающей системой для генерирования электрических сигналов отклика, которые используют для определения положения (и ориентации) маркерного устройства.
Термин «генератор поля» может относиться, в частности, к генератору магнитного или электромагнитного поля возбуждения. В некоторых вариантах реализации генератор поля может содержать массив генерирования магнитного поля, содержащий множество блоков генерирования. В некоторых вариантах реализации эти блоки генерирования могут, в частности, соответствовать соответствующим катушкам, которые расположены в виде массива катушек. В некоторых вариантах реализации управление каждой из катушек может быть независимым. В некоторых вариантах реализации такое независимое управление может быть использовано для обеспечения неоднородного магнитного или электромагнитного поля возбуждения, в идеале имеющего постоянный градиент поля на всем рабочем пространстве поля.
В целом, настоящая концепция основана на том факте, что отклик магнитного объекта на магнитное или электромагнитное поле возбуждения (измеряемый в механических колебаниях) может обеспечить информацию о положении и/или ориентации маркерного устройства, в которое входит чувствительное устройство, содержащее магнитный объект. Дело в том, что магнитное или электромагнитное поле возбуждения может влиять на магнитный объект по-разному в зависимости от относительного положения между магнитным объектом и магнитным или электромагнитным полем возбуждения.
Для определения положения, т.е. для выполнения локализации, маркерного устройства и, следовательно, медицинского устройства, к которому прикреплено маркерное устройство, на основе отклика механического генератора колебаний на магнитное или электромагнитное поле возбуждения могут быть использованы различные возможные подходы. В этом контексте могут быть использованы два конкретных подхода к определению положения, также называемых подходами к локализации. Одним подходом будет выполнение определения положения на основе чувствительности катушки различных катушек в массиве катушек. Этот подход основан на том факте, что каждая катушка в массиве катушек генератора поля имеет отличный от других профиль Bs,i(r) чувствительности в зависимости от ее положения и ориентации в отслеживающей системе. В этом случае магнитный объект чувствительного блока будет реагировать характерным механическим колебанием для каждой катушки, в частности, с характерной амплитудой, которую определяют посредством динамического дипольного момента  для механического объекта относительно Bs,i(r).
для механического объекта относительно Bs,i(r).
Другой подход будет основан на кодировании градиентного поля. В данном подходе используют тот факт, что частотами маркерного устройства можно манипулировать для получения независимой информации о положении. Для этой цели может быть сгенерировано неоднородное магнитное поле, в идеале имеющее постоянный градиент поля по всему рабочему пространству, например, путем приложения низкочастотных токов к выбранным катушкам в массиве катушек. Такое неоднородное поле можно получить, например, за счет обеспечения вышеупомянутого независимого управления катушками.
Это дополнительное поле изменяет восстанавливающее поле Brest, действующее на магнитный объект чувствительного блока и, следовательно, изменяет частоту колебания. Из-за неоднородного характера магнитного или электромагнитного поля это изменение частоты будет зависеть от положения и ориентации маркерного устройства.
Особенности этих подходов к локализации будут подробно рассмотрены ниже. В некоторых вариантах реализации может быть достаточно одного такого подхода, тогда как в других вариантах реализации может быть полезна комбинация обоих подходов для повышения точности или для выявления систематических ошибок (например, сильного ферромагнита в рабочем пространстве), которые могут привести к противоречащим результатам между двумя способами.
В некоторых вариантах реализации блок определения положения может быть выполнен с возможностью определения на основе одного или более электрических сигналов отклика по меньшей мере пяти степеней свободы для маркерного устройства относительно системы координат, обеспечиваемой отслеживающей системой, причем в число этих по меньшей мере пяти степеней свободы входят положение и по меньшей мере два угла ориентации маркерного устройства относительно отслеживающего устройства.
В некоторых вариантах реализации отслеживающая система может определять систему координат или может быть обеспечена ею, а маркерное устройство может быть локализовано относительно упомянутой системы координат. Для этой цели блок определения положения может быть выполнен с возможностью определения по меньшей мере пяти степеней свободы (DoF) для маркерного устройства на основе одного или более сигналов отклика. Эти пять степеней свободы могут позволять определять положение, а также ориентацию (в виде двух углов ориентации) маркерного устройства относительно системы координат отслеживающей системы. Следовательно, благодаря этой конструкции становится возможным определение положения и ориентация маркерного устройства и, соответственно, медицинского устройства, к которому прикреплено маркерное устройство, с использованием только одного маркерного устройства.
В соответствии с некоторыми вариантами реализации отслеживающая система может быть выполнена с возможностью определения положения множества маркерных устройств, причем каждое из множества маркерных устройств содержит соответствующий чувствительный блок. Магнитные объекты соответствующего чувствительного блока могут колебаться, в частности, колебаться вращательно, с различными резонансными частотами с генерированием разного магнитного или электромагнитного поля, подлежащего преобразованию в соответствующие один или более электрических сигналов отклика, специфичных для соответствующего маркерного устройства. В таком случае может быть предусмотрен блок определения положения для определения положения одного или более из множества маркерных устройств на основе соответствующего одного или более электрических сигналов отклика.
Предпочтительно отслеживающая система выполнена с возможностью определения положения нескольких маркерных устройств, причем магнитные объекты нескольких маркерных устройств выполнены с возможностью совершения колебаний, предпочтительно вращательных, с различными резонансными частотами так, чтобы индукционные сигналы различных маркерных устройств имели разные частоты, причем блок определения положения выполнен с возможностью определения положений маркерных устройств на основе генерируемых индукционных сигналов, имеющих разные частоты. Блок определения положения предпочтительно также выполнен с возможностью определения ориентации маркерных устройств на основе генерируемых индукционных сигналов, имеющих разные частоты. За счет использования различных маркерных устройств с разными резонансными частотами можно различать различные маркерные устройства и определять для каждого маркерного устройства соответствующее положение и предпочтительно соответствующую ориентацию тоже.
Несколько маркерных устройств могут быть прикреплены к одному медицинскому устройству, причем блок определения положения может быть выполнен с возможностью определения формы, и/или положения, и/или ориентации медицинского устройства на основе определенных положений нескольких маркерных устройств. Кроме того, блок определения положения может быть выполнен с возможностью определения формы, и/или положения, и/или ориентации медицинского устройства на основе ориентаций, определенных для нескольких маркерных устройств. Хотя маркерные устройства могут быть, в частности, использованы для определения формы, и/или положения, и/или ориентации медицинского устройства, следует понимать, что маркерные устройства также могут быть использованы для определения формы, и/или положения, и/или ориентации других элементов, таких как, например ткань тела и т.п., на которых прикреплено множество маркерных устройств. В некоторых вариантах реализации множество маркерных устройств также может быть распределено между медицинским устройством, используемым для обработки ткани, и соответствующей тканью, чтобы собирать информацию об обоих элементах и/или взаимосвязи обоих элементов друг с другом.
В варианте реализации блок определения положения выполнен с возможностью определения положения одного конкретного маркерного устройства относительно положения другого маркерного устройства. Кроме того, может быть определена ориентация маркерного устройства относительно другого маркерного устройства. Однако положение и, при необходимости, ориентация также могут быть определены относительно другой привязки. Для этого отслеживающая система может быть также обеспечена соответствующим устройством вывода для вывода определенного положения и/или ориентации маркерного устройства.
В некоторых вариантах реализации блок определения положения отслеживающей системы может быть выполнен с возможностью компенсации зависимости одного или более электрических сигналов от температуры. В некоторых вариантах реализации блок определения положения может быть выполнен с возможностью применения алгоритма компенсации для выполнения такой компенсации.
В предпочтительном варианте реализации отслеживающая система и, в частности, блок определения положения, могут быть выполнены с возможностью компенсации зависимости одного или более электрических сигналов от температуры. Для этой цели предпочтительно определяют зависимое от температуры поведение магнитного объекта, т.е. зависимость от температуры его резонансных частот, либо экспериментально, либо при помощи соответствующих вычислений.
В некоторых вариантах реализации отслеживающая система может быть в этом случае обеспечена температурным датчиком и/или средствами ввода для ввода температуры. В таком случае может быть предусмотрен алгоритм, который учитывает введенную температуру и коррелирует ее с известной зависимостью резонансной частоты магнитного объекта, чтобы компенсировать зависимость от температуры. Это позволяет убирать воздействия температуры из электрических сигналов, что приводит к более точному подходу к определению положения/локализации. Таким образом, в некоторых вариантах реализации компенсация температуры может быть выполнена посредством алгоритма компенсации, т.е. реализована в программном коде.
В качестве альтернативы или дополнительно компенсацию температуры также можно получить другими средствами, такими как физический элемент компенсации. Т.е. в некоторых вариантах реализации само маркерное устройство и, более конкретно, чувствительный блок может быть выполнен с возможностью компенсации зависимости резонансной частоты механического колебания магнитного элемента от температуры. Для этой цели чувствительный блок может содержать компенсационный элемент, который выполнен с возможностью изменения резонансной частоты, в зависимости от изменения температуры, в первом направлении частоты, противоположном второму направлению частоты, в котором изменялась бы резонансная частота чувствительного блока в зависимости от изменения температуры, если бы компенсационный элемент не был частью чувствительного блока. Эта конструкция позволяет уменьшать или даже устранять вызываемые температурой сдвиги резонансной частоты. При этом первое направление частоты может, в частности, соответствовать направлению к более высоким или более низким частотам, а противоположное второе направление может соответствовать направлению к более низким или более высоким частотам, соответственно.
Предпочтительно компенсационный элемент содержит магнитный материал, который изменяет свою намагниченность и, тем самым, резонансную частоту в зависимости от температуры, причем магнитный материал выбирают и располагают в чувствительном блоке, в частности, в корпусе чувствительного блока, таким образом, что направление изменения резонансной частоты является первым направлением частоты. Компенсирующий магнитный материал предпочтительно располагают рядом с магнитным объектом и/или рядом с дополнительным магнитным объектом, как описано в настоящем документе ниже. Это позволяет проектировать маркерное устройство таким образом, чтобы можно было значительно уменьшить или даже устранить нежелательную зависимость от температуры относительно простым техническим способом и не занимая много места в корпусе.
В некоторых вариантах реализации блок определения положения может быть выполнен с возможностью применения алгоритма компенсации для компенсации одного или более из: статических фоновых полей и динамических фоновых полей.
В некоторых вариантах реализации блок определения положения может также применять алгоритм компенсации для компенсации статических и/или динамических фоновых полей. Статические фоновые поля добавляются к полю неподвижного магнитного объекта и, таким образом, модулируют восстанавливающее поле Brest на колеблющемся магнитном объекте. Соответственно, получающаяся в результате резонансная частота изменяется, что может быть источником ошибки при выполнении определения положения с использованием изменений частоты колеблющегося магнитного объекта.
В некоторых вариантах реализации компенсация может быть выполнена соответствующим алгоритмом, реализованным в отслеживающей системе и, в частности, применена блоком определения положения. Для этой цели отслеживающая система может быть обеспечена одним или более датчиками абсолютного поля, выполненными с возможностью измерения величины и ориентации статических фоновых полей. На основе ориентации маркерного устройства можно вычислить коррекцию частоты или поля для получения правильного значения положения и/или ориентации.
Для определения статических фоновых полей можно использовать любой датчик магнитного поля с достаточной чувствительностью и занимаемой площадью, которая позволяет интегрировать в отслеживающую систему. В качестве примера следует упомянуть 3-осевой датчик Холла. В качестве альтернативы или дополнительно может быть использован 3-осевой массив микроботов с температурной компенсацией и четко определенной частотой нулевого поля. Из изменения их соответствующих частот можно определить величину и ориентацию фоновых полей. В идеале их резонансные частоты выбирают так, что они не создают помех частоте чувствительного блока.
Вместо коррекции смещения оцениваемой частоты также можно использовать катушки многокатушечных отслеживающих систем, чтобы генерировать поля смещения для уравновешивания фоновых полей и/или даже магнитных полей Земли. Если в поле обзора существуют неоднородные поля из-за наличия ферромагнитного материала, можно использовать несколько наборов 3-осевых датчиков магнитного поля, чтобы охарактеризовать пространственные изменения поля. На основе интерполированной карты фонового поля, полученной из этих измерений, можно вычислить коррекцию для чувствительного блока в известном положении и ориентации, или можно применить соответствующие корректирующие поля сдвига, или использовать комбинацию этих двух способов коррекции.
В соответствии с некоторыми вариантами реализации смягчить влияние статического и/или динамического фонового поля можно также на стороне маркерного устройства. В этом случае чувствительный блок маркерного устройства может быть выполнен с возможностью использования двух подвешенных сфер, имеющих идентичные магнитный дипольный момент и момент инерции (или подходящее соотношение этих двух величин), Поскольку противоколебание происходит на одной частоте, эффект первого порядка статического поля отклонения, такого как магнитное поле Земли, гасится.
В некоторых вариантах реализации блок определения положения может быть выполнен с возможностью применения алгоритма компенсации для компенсации нелинейности, получающейся в результате различных амплитуд колебания механических колебаний.
Блок определения положения может быть выполнен с возможностью компенсации нелинейности в системе, которая может возникать в результате различных амплитуд колебания механических колебаний магнитного объекта чувствительного блока. В некоторых вариантах реализации это, в частности, может охватывать дополнительный необязательный этап обработки данных, на котором применяют обратный нелинейный фильтр для уменьшения нелинейности системы. При этом измеряют нелинейность отслеживающей системы и создают вычислительный фильтр для обращения эффекта нелинейности. Это особенно полезно при использовании недорогих компонентов, поскольку они имеют обыкновение вести себя более нелинейно.
В альтернативном варианте реализации нелинейный фильтр может быть использован в качестве первого этапа обработки. При использовании более одного сигнала выполняют дополнительные этапы обработки сигнала. Если по меньшей мере один канал приема не обнаруживает отклик от чувствительного блока маркерного устройства и, таким образом, предоставляет меру фонового сигнала, этот сигнал (и все другие такие сигналы) коррелирует с принятым сигналом, и коррелирующие компоненты вычитают из каналов, несущих сигнал. Это вычитание может быть выполнено во временной или частотной области или комбинации той и другой. Если каналы, в которых нет никакого сигнала датчика, отсутствуют, можно использовать стратегию обработки данных, иногда называемую «виртуальным градиентометром». При этом множество каналов разбивают на виртуальные каналы, которые представляют собой линейные комбинации физических каналов, чтобы свести к минимуму помехи сигналов отклика, не генерируемых датчиком. Коэффициенты для линейной комбинации можно найти корреляцией сигналов каналов, исключая полосу сигнала чувствительного блока или чувствительных блоков.
Генератор поля может содержать массив генерирования магнитного поля, содержащий множество блоков генерирования, расположенных с заданным пространственным расположением. При этом один или более электрических сигналов отклика могут указывать на характерное механическое колебание магнитного объекта чувствительного блока, индуцированное каждым из множества блоков генерирования, причем блок определения положения выполнен с возможностью определения положения маркерного устройства, по меньшей мере частично, на основе одного или более электрических сигналов отклика, указывающих характерное механическое колебание. В некоторых вариантах реализации блок определения положения выполнен с возможностью определения, из одного или более электрических сигналов отклика, амплитуды характерных механических колебаний магнитного объекта для каждого из множества блоков генерирования.
В некоторых вариантах реализации генератор поля может содержать множество блоков генерирования, пространственно расположенных в виде массива генерирования магнитного поля. В некоторых вариантах реализации это пространственное расположение может быть двумерным. Однако может быть предусмотрено и трехмерное пространственное расположение. В некоторых вариантах реализации массив генерирования магнитного поля может соответствовать массиву катушек, а блоки генерирования могут соответствовать одной или более катушкам. В таком случае оценка положения/локализация может быть выполнена, по меньшей мере частично, на основе чувствительности катушки отдельных катушек в массиве катушек. Данный подход будет описан подробнее ниже.
В некоторых вариантах реализации отслеживающая система может также содержать блок управления, а генератор поля содержит массив генерирования магнитного поля, содержащий множество блоков генерирования, расположенных с заданным пространственным расположением, причем каждый из множества блоков генерирования выполнен с возможностью управления им блоком управления независимо от остальных блоков генерирования множества блоков генерирования, блок управления выполнен с возможностью управления по меньшей мере некоторыми из блоков генерирования так, что по меньшей мере один пространственный компонент поля возбуждения магнитного или электромагнитного поля возбуждения выполнен с возможностью изменения посредством упомянутого управления, при этом блок определения положения выполнен с возможностью определения положения маркерного устройства, по меньшей мере частично, на основе одного или более электрических сигналов отклика, указывающих изменение по меньшей мере одного пространственного компонента поля возбуждения. В некоторых вариантах реализации генератор поля выполнен с возможностью последовательного генерирования набора различных дополнительных магнитных или электромагнитных полей возбуждения, меняющихся в пространстве и/или времени, причем блок определения положения выполнен с возможностью определения положения маркерного устройства, по меньшей мере частично, на основе одного или более электрических сигналов отклика, преобразованных преобразователем на основе магнитного или электромагнитного поля, генерируемого индуцированными механическими колебаниями магнитного объекта в ответ на каждое поле из наборов различных дополнительных магнитных или электромагнитных полей возбуждения.
Кроме того, локализация может быть выполнена на основе кодирования градиентного поля. В то время как локализация с помощью чувствительности катушки основана на распределении амплитуды, воспринимаемом массивом катушек, для получения независимой информации о положении можно манипулировать частотами маркеров. Для этого формируют неоднородное магнитное поле, в идеале имеющее постоянный градиент поля по всему рабочему пространству, например, путем приложения низкочастотных токов к выбранным катушкам массива катушек.
Это дополнительное поле изменяет восстанавливающее поле Brest, действующее на колебательный магнитный объект и, следовательно, его частоту. Из-за неоднородного характера поля это изменение частоты будет зависеть от положения и ориентации маркера. Последовательно применяя несколько электромагнитных полей возбуждения (например, градиент поля, применяемый в 6 различных ориентациях), можно определить все три параметра положения и два из трех параметров ориентации маркера. Однако оставшийся угол может быть отложен из-за более высокого порядка отклика датчика на внешние магнитные поля за счет более высоких напряженностей поля, необходимых для генерирования достаточных вкладов более высокого порядка. Основная идея кодирования относится к кодированию градиента в МРТ; таким образом, могут быть выполнены как частотное кодирование, так и фазовое кодирование.
Для частотного кодирования применяют неоднородное поле во время считывания сигнала, чтобы создать требуемое смещение частоты. Для требуемого пространственного разрешения применяемая напряженность поля должны быть адаптирована к частотной чувствительности маркерного устройства и разрешению по частоте, обеспечиваемому отслеживающей системой.
Для фазового кодирования применяют неоднородное поле перед считыванием сигнала, т.е. зависимое от положения смещение частоты применяют только на протяжении короткого промежутка, в течение которого зависимое от положения смещение фазы сигнала нарастает. В случае, когда разрешение по фазе недостаточное для точного определения положения/локализации, можно варьировать длительность и/или амплитуду импульсов фазового кодирования при последовательных возбуждениях, чтобы можно было различать неоднозначности в нарастаниях фазы (больше чем 2π). Таким образом, за несколько считываний получают полную пространственную информацию.
Для эффективной локализации фазовое кодирование с одной неоднородной структурой поля (например, кодирование одной пространственной оси) может быть объединено с частотным кодированием с другой неоднородной структурой поля (например, кодирование ортогональной пространственной оси). Если грубое положение маркера уже известно из подхода на основе кодирования чувствительности (который быстрее ввиду его параллельного характера), достаточно будет использовать только несколько этапов фазового кодирования, которые обеспечивают недостающие компоненты высокого разрешения (высокой пространственной частоты), но не полную пространственную информацию.
Как указано в данном описании, сравнение результатов локализации, полученных кодированием градиента и кодированием чувствительности, может быть использовано для выявления систематических ошибок, например, возникающих из-за фоновых полей. Кроме того, следует отметить, что линейный отклик чувствительных блоков, использующих, например, две подвешенные магнитные сферы в качестве магнитных объектов, на низкочастотные внешние поля может быть подавлен; в этом случае частотный отклик более высокого порядка может быть использован не только для локализации, но и для проверок корректности. Однако чувствительность поля этих генераторов колебаний гораздо ниже, поэтому для кодирования градиентного поля потребуются поля с более высоким градиентом.
В соответствии еще с одним аспектом предложено маркерное устройство, прикрепляемое к медицинскому устройству и выполненное с возможностью отслеживания отслеживающей системой, как описано выше. Маркерное устройство содержит корпус и чувствительный блок, содержащий магнитный объект, обеспечивающий постоянный магнитный момент. Чувствительный блок выполнен с возможностью преобразования внешнего магнитного или электромагнитного поля возбуждения в механическое колебание магнитного объекта, причем индуцированное механическое колебание не зависит от внешнего давления, которому подвергается чувствительный блок. В частности, корпус может быть жестким корпусом. В некоторых вариантах реализации маркерное устройство может иметь удлиненную форму, причем максимальный размер меньше или равен 5 мм, а минимальный размер меньше или равен 1 мм. В некоторых вариантах реализации магнитный объект может быть расположен внутри корпуса так, чтобы он мог поворачиваться из равновесной ориентации, если на магнитный объект действует внешнее магнитное или электромагнитное поле возбуждения. При этом чувствительный блок может также содержать блок восстанавливающего крутящего момента, чтобы обеспечивать восстанавливающий крутящий момент для возврата магнитного объекта в равновесную ориентацию, если внешнее магнитное или электромагнитное поле возбуждения повернуло магнитный объект из равновесной ориентации, чтобы обеспечить механическое колебание магнитного объекта с резонансной частотой.
В соответствии еще с одним аспектом предложено маркерное устройство, которое позволяет определять положение и/или ориентацию медицинского устройства, к которому может быть прикреплено маркерное устройство. Маркерное устройство может содержать корпус и чувствительный блок. Чувствительный блок позволяет преобразовывать внешнее магнитное или электромагнитное поле возбуждения, генерируемое генератором поля, в механическое, предпочтительно вращательное, колебание магнитного объекта, который предусмотрен в чувствительном блоке и имеет постоянный магнитный момент.
Чувствительный блок, содержащий магнитный объект, может, в частности, содержать корпус или находиться внутри него. В частности, магнитный объект может быть расположен внутри корпуса. При этом магнитный объект, в частности, может быть расположен внутри корпуса так, чтобы он мог поворачиваться из равновесной ориентации внешним магнитным крутящим моментом, действующим на магнитный объект. Внешний магнитный крутящий момент может быть вызван внешним магнитным или электромагнитным полем, действующим на магнитный объект. Т.е. в некоторых вариантах реализации магнитный объект поворачивается из своего равновесного положения внешним магнитным или электромагнитным полем.
Чувствительный блок может также содержать блок восстанавливающего крутящего момента, чтобы обеспечивать восстановление крутящего момента для принудительного возврата магнитного объекта в равновесную ориентацию, если внешнее магнитное или электромагнитное поле повернуло магнитный объект из равновесной ориентации. Это приводит к вращательному колебанию магнитного объекта, возбуждаемого внешним магнитным крутящим моментом от внешнего магнитного или электромагнитного поля. Таким образом, магнитным объектом выполняются вращательные колебания с соответствующей резонансной частотой, которая зависит от пространственного положения и ориентации чувствительного блока и, следовательно, маркерного устройства во внешнем магнитном или электромагнитном поле. Получающееся в результате магнитное или электромагнитное поле, генерируемое механическими вращательными колебаниями магнитного объекта, может быть затем преобразовано в один или более сигналов отклика. Таким образом, эти сигналы отклика зависят от резонансной частоты колебаний.
В частности, в некоторых вариантах реализации вращательные колебания могут, в конечном счете, привести к соответствующим индукционным сигналам, причем эти индукционные сигналы зависят от пространственного положения и ориентации маркерного устройства во внешнем магнитном или электромагнитном поле. Эти индукционные сигналы могут быть, в частности, сгенерированы в блоке сигналов возбуждения и индукции отслеживающей системы. В частности, блок сигналов возбуждения и индукции может содержать: i) первые катушки, выполненные с возможностью генерирования магнитного поля, обеспечивающего магнитный крутящий момент для поворота магнитного объекта следящего устройства из его равновесной ориентации и возбуждения тем самым вращательного колебания магнитного объекта, и ii) вторые катушки, выполненные с возможностью генерирования индукционных сигналов, которые зависят от пространственного положения и ориентации маркерного устройства. Это позволяет определять положение и ориентацию, т.е. шесть степеней свободы, маркерного устройства, так что определять положение и ориентацию медицинского устройства, оборудованного этим маркерным устройством, можно с помощью всего одного маркерного устройства.
Кроме того, эта конструкция позволяет следящему устройству выполнять отслеживание на основе маркерного устройства с относительно большого расстояния, которое, например, превышает 30 см. К тому же маркерное устройство может быть относительно небольшим, например, меньше 1 мм. Для этого в некоторых вариантах реализации корпус маркерного устройства может быть цилиндрическим с внешним диаметром цилиндра меньше 1 мм, более предпочтительно меньше 0,5 мм и еще более предпочтительно меньше 0,3 мм.
Предпочтительно магнитный объект выполнен с возможностью вращения вокруг виртуальной оси вращения, проходящей по центру магнитного объекта, причем магнитный объект осесимметричен относительно виртуальной оси вращения. В частности, магнитный объект может быть магнитной сферой или магнитным цилиндром. Кроме того, блок восстанавливающего крутящего момента может содержать торсионный пружинный механизм для обеспечения восстанавливающего крутящего момента. Дополнительно или в качестве альтернативы блок восстанавливающего крутящего момента может также содержать дополнительный магнитный объект для обеспечения восстанавливающего крутящего момента.
В варианте реализации магнитные объект прикреплен к одному концу крепежной части, такой как волосок, а другой конец крепежной части прикреплен к корпусу. Крепежная часть может быть выполнена с возможностью предотвращения касания магнитным объектом дополнительного магнитного объекта, создающего восстанавливающий крутящий момент в силу его магнитного притяжения, и обеспечения вращательного колебания магнитного объекта. Дополнительный магнитный объект предпочтительно неподвижно, соответственно, жестко прикреплен к корпусу. Однако дополнительный магнитный объект также может быть расположен внутри корпуса так, чтобы он мог совершать вращательные колебания относительно корпуса. В частности, дополнительный магнитный объект прикреплен к одному концу другой крепежной части, такой как волосок, а второй конец крепежной части может быть прикреплен к корпусу.
В предпочтительном варианте реализации дополнительный магнитный объект выполнен с возможностью вращения вокруг виртуальной оси вращения, проходящей по центру дополнительного магнитного объекта, причем магнитный объект осесимметричен относительно виртуальной оси вращения. Дополнительный магнитный объект также может быть магнитной сферой или магнитным цилиндром. Кроме того, виртуальные оси магнитного объекта и дополнительного магнитного объекта предпочтительно совмещены друг с другом.
Эти методы позволяют обеспечивать восстанавливающий крутящий момент и, следовательно, вращательное колебание магнитного объекта таким образом, что маркерное устройство в целом может быть относительно небольшим, резонансная частота маркерного устройства может быть обеспечена требуемым образом, а конструкция маркерного устройства, тем не менее, может быть относительно простой.
Итак, чтобы выполнить определение положения, получающееся в результате механическое вращательное колебание магнитного объекта должно быть независимым от любого внешнего давления, которому подвергается чувствительный блок. В качестве примера, если маркерное устройство используют для отслеживания медицинского устройства, которое применяют в инвазивной процедуре, на колебание магнитного объекта внутри маркерного устройства не должно влиять никакое давление, действующее на медицинский прибор снаружи, такое как кровяное давление или давление кровообращения и т.д.
Для этой цели маркерное устройство снабжено корпусом, в котором находится чувствительный блок, причем этот корпус может иметь одну или более жестких стенок и предпочтительно может быть жестким корпусом, имеющим стенки, которые не меняют свою форму в случае воздействия на них внешнего давления. Это означает, что расположение магнитного объекта внутри корпуса почти полностью не зависит от внешнего давления, поскольку стенки не изгибаются в ответ на внешнее давление. Что, в свою очередь, приводит к тому, что расстояние между магнитным объектом и блоком восстанавливающего крутящего момента, который также предусмотрен в корпусе, остается неизменным независимо от давления, действующего снаружи на чувствительный блок. Соответственно, магнитные силы, действующие между магнитным объектом и блоком восстанавливающего крутящего момента, не изменяются из-за изменений расстояния по причине изгибания каких-либо стенок корпуса под действием давления, а потому не зависят ни от какого внешнего давления, действующего на чувствительный блок. Соответственно, на резонансную частоту вращательного колебания, вызываемого внешним магнитным или электромагнитным полем, действующим на магнитный объект, никакие изменения расстояния также не влияют. Это означает, что на изменения резонансной частоты по большей части влияют положение и ориентация чувствительного блока и, следовательно, маркерного устройства во внешнем магнитном или электромагнитном поле. В результате чувствительный блок может быть использован для определения положения/локализации маркерного устройства, а значит, медицинского устройства, к которому оно прикреплено.
Посредством такого магнитного объекта, помещенного в (жесткий) корпус, может быть создано небольшое маркерное устройство, которое может иметь довольно маленький размер, не превышающий даже 1 мм. Поэтому данное маркерное устройство особенно подходит для использования в отслеживающей системе для отслеживания медицинского устройства во время минимально инвазивной хирургии.
В соответствии еще с одним аспектом предложено медицинское устройство для использования во время хирургической операции, имеющее прикрепленное к нему маркерное устройство, как описано ранее. Маркерное устройство предназначено для отслеживания отслеживающей системой, как описано ранее. В некоторых вариантах реализации медицинское устройство содержит кончик, выполненный с возможностью прикрепления к нему маркерного устройства. В некоторых вариантах реализации медицинское устройство может содержать одно или более из инвазивного устройства или имплантата, в частности электрического имплантата и/или ортопедического имплантата. В некоторых вариантах реализации медицинское устройство может содержать, в частности, одно или более из: хирургического прибора, формирующего изображение зонда, эндоскопа, бронхоскопа или таблетки для приема внутрь. В качестве альтернативы или дополнительно медицинское устройство может содержать одно или более из катетера, проволоки, в частности проволочного направителя, стента, одной или более спиралей для эмболизации аневризмы, одного или более фильтров для полой вены, сердечного клапана, шунта, иглы, проволоки, трубки, стилета или радиоактивной гранулы. В некоторых вариантах реализации медицинское устройство может иметь продолговатую форму. Медицинское устройство может быть выполнено с возможностью наличия прикрепленных к нему множества маркерных устройств, как описано выше в настоящем документе, причем множество маркерных устройств могут быть расположены вдоль продольной оси упомянутого медицинского устройства.
В соответствии еще с одним аспектом предложен способ отслеживания для отслеживания маркерного устройства, как описано ранее, причем маркерное устройство прикрепляют к медицинскому устройству, как описано выше в настоящем документе, с использованием отслеживающей системы, как описано. В частности, отслеживающая система может быть использована во время хирургической операции. Способ отслеживания включает генерирование магнитного или электромагнитного поля возбуждения для индуцирования механических колебаний магнитного объекта чувствительного блока, преобразование магнитного или электромагнитного поля, генерируемого индуцированными механическими колебаниями магнитного объекта чувствительного блока, в один или более электрических сигналов отклика, определение положения маркерного устройства на основе одного или более электрических сигналов отклика, при этом один или более электрических сигналов отклика указывают характерное механическое колебание магнитного объекта чувствительного блока, индуцированное неоднородным магнитным полем, генерируемым множеством блоков генерирования массива генерирования магнитного поля генератора поля, а множество блоков генерирования расположены с заданным пространственным расположением, причем определение положения маркерного устройства основано, по меньшей мере частично, на одном или более электрических сигналах отклика, указывающих характерное механическое колебание. В соответствии еще с одним аспектом предложена компьютерная программа, содержащая средства программного кода для вызова выполнения отслеживающей системой, как определено ранее, этапов вышеупомянутого способа отслеживания при выполнении компьютерной программы на компьютере, управляющем отслеживающей системой.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Содержание чертежей:
на Фиг. 1 схематически и в качестве примера показан вариант реализации маркерного устройства в соответствии с первым вариантом реализации,
на Фиг. 2 схематически и в качестве примера показано маркерное устройство, которое прикреплено к медицинскому прибору,
на Фиг. 3 показан другой ракурс маркерного устройства и медицинского устройства в соответствии с Фиг. 2,
на Фиг. 4 схематически и в качестве примера показана еще одна реализация маркерного устройства в отслеживающей системе для отслеживания медицинского устройства,
на Фиг. 5А и 5В схематически и в качестве примера показана еще одна реализация маркерного устройства в отслеживающей системе для отслеживания медицинского устройства,
на Фиг. 6 схематически и в качестве примера показана реализация маркерного устройства и отслеживающей системы для определения положения опухоли,
на Фиг. 7 схематически и в качестве примера показана реализация множества маркерных устройств и отслеживающей системы для определения положения, и/или ориентации, и/или формы представляющей интерес области в ткани пациента,
на Фиг. 8 схематически и в качестве примера показан вариант реализации медицинского устройства, соответствующего проволоке для лечения аневризмы мозга, к которой прикреплено маркерное устройство.
на Фиг. 9 схематически и в качестве примера показан вариант реализации медицинского устройства, соответствующего печеночному шунтирующему устройству, к которому прикреплено маркерное устройство.
на Фиг. 10 схематически и в качестве примера показан вариант реализации маркерного устройства с компенсацией температуры,
на Фиг. 11 и 12 схематически и в качестве примера показана отслеживающая система для отслеживания маркерного устройства в соответствии с вариантом реализации изобретения,
на Фиг. 13 схематически и в качестве примере показаны импульсы возбуждения и получающиеся в результате индуцированные напряжения,
на Фиг. 14 схематически и в качестве примера показан многокатушечный массив, встроенный в матрас передвижного стола системы формирования изображения,
на Фиг. 15 схематически и в качестве примера показаны приемные катушки отслеживающей системы для обнаружения изменения магнитного или электромагнитного поля, вызванной механическими колебаниями,
на Фиг. 16 показан частотный спектр, используемый для определения резонансной частоты,
на Фиг. 17 схематически и в качестве примера показан аналоговый приемный фильтр,
на Фиг. 18 в качестве примера показана частотная характеристика полосы пропускания фильтра Чебышева II типа,
на Фиг. 19 показана измеренная зависимость амплитуды сигнала в различных гармониках от ориентации датчика относительно одной приемопередающей катушки, и
на Фиг. 20 схематически и в качестве примера показан еще один вариант реализации маркерного устройства.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
На Фиг. 1 схематически и в качестве примера показан вариант реализации маркерного устройства 501 для прикрепления к медицинскому устройству для отслеживания отслеживающей системой, которую используют во время хирургической операции, в частности, минимально инвазивной хирургии на человеке, в частности пациенте. Маркерное устройство 501 содержит чувствительный блок с двумя магнитными объектами 507, 508.
Магнитный объект 508 подвешен к крепежной части 506, такой как волосок, и поэтому может свободно выполнять вращательное движение вокруг главной оси чувствительного блока. В этом варианте реализации другой магнитный объект 507 зафиксирован. Однако другой магнитный элемент также может быть подвешен к крепежной части, такой как волосок, и, таким образом, может свободно выполнять вращательное движение вокруг главной оси чувствительного блока.
В состоянии равновесия магнитные объекты 507, 508, соответственно, выровнены в направлении, противоположном ориентации их намагниченности. Для запуска резонансного вращательного колебания может быть использован импульс внешнего магнитного поля. Сила притяжения определяет резонансную частоту колебания, которая для сферического подвешенного магнита задается уравнением:
где MS - намагниченность насыщения магнитного материала, ρ - его плотность, r - диаметр сферы и В - поле, создаваемое фиксированным магнитным объектом. Его можно аппроксимировать как поле диполя:
где m - магнитный момент магнитного объекта.
Изменение поля, генерируемое колеблющимся магнитным объектом 508, может быть обнаружено посредством индуцированного напряжения в одной или более катушках обнаружения преобразователя, который выполнен с возможностью преобразования магнитного или электромагнитного поля, генерируемого механическими колебаниями магнитного объекта 508 чувствительного блока, в электрические сигналы отклика. Из кривой зависимости от времени обнаруженного сигнала с помощью преобразования Фурье можно получить спектр, который позволяет определить резонансную частоту.
Ввиду того, что резонансные частоты низкие и составляют несколько кГц, магнитные поля не экранируются металлом, и поэтому в качестве материалов конструкции и покрытия можно использовать все не ферромагнитные металлы. Аналогичным образом маркерное устройство может быть помещено в неферромагнитные металлические объекты без воздействия на их работу при условии, что толщина металла не сильно превышает глубину скин-эффекта. На этих частотах для очень хороших проводников, вроде меди, глубина скин-эффекта составляет порядка одного миллиметра, в то время как для нитинола глубина скин-эффекта составляет около 10 миллиметров.
Таким образом, чувствительный блок 501 содержит два магнитных объекта 507, 508, причем в состоянии равновесия магнитные объекты 507, 508 выровнены с направлением, противоположным направлению намагниченности. Для запуска вращательного колебания подвешенного магнитного объекта 508 (который в варианте реализации, изображенном на Фиг. 1, соответствует магнитной сфере) вокруг главной оси чувствительного блока может быть использован импульс внешнего поля, обеспечиваемый соответствующим генератором поля, тогда как другой магнитный элемент 507, тоже реализованный в виде магнитной сферы в данном конкретном варианте реализации, зафиксирован. Еще в одном варианте реализации другой магнитный объект 507 также подвешен в свободном пространстве и может совершать вращательное колебание, причем оба магнитных объекта 507, 508 могут совершать резонансное встречное колебание.
Известно, что для определения положения и/или ориентации маркерного устройства относительно отслеживающей системы используют магнитомеханические генераторы колебаний. Известно также, что для выполнения такой оценки положения используют LC-генераторы. Маркерное устройство, содержащее чувствительный блок, показано, например, в статье В. Maxwell и др. «Validation of the Calypso Surface Beacon Transponder», Journal of Applied Clinical Medical Physics, т. 17, стр. 223-234 (2016). Однако показанные там маркерные устройства обычно имеют размер 8 мм. Было бы полезно создать маркерные устройства меньшего размера. К сожалению, с уменьшением размера маркерного устройства точность измерения тоже снижается. Соответственно, измерения для определения положения с использованием вышеприведенных маркерных устройств не идеальны, в частности, в случае маркерных устройств малого размера.
То есть, с уменьшением размера уровень мощности, который может быть сгенерирован в генераторе колебаний, и динамический момент диполя, генерируемый при этой мощности, снижаются. Это можно увидеть из следующего уравнения. Добротность резонатора не может быть выше добротности катушки. Приближение для добротности катушки можно записать следующим образом:

где ω - частота, μo - магнитная проницаемость вакуума, ρ - удельное сопротивление, τ - доля радиуса, состоящая из проводника, и r - радиус катушки. Предполагается, что катушка имеет форму цилиндра, диаметр которого совпадает с высотой. Для медной катушки диаметром 1 мм при частоте 100 кГц достигается добротность около 1. Таким образом, максимальная добротность, достигаемая при механических резонансах, обычно слишком мала для эффективной работы. Существуют некоторые материалы, такие как плавленый кварц, которые обеспечивают высокую добротность при колебании. Эти материалы обычно довольно твердые и не обеспечивают достаточно высокую амплитуду колебания (достаточно высокий угол), чтобы быть эффективными, т.е. генерировать достаточно большое изменение поля. Это может привести к необходимости довольно высокого отношения сигнал-шум, что, в свою очередь, приводит к необходимости большого количества магнитного материала, а из-за этого датчик становится большим.
Вышеприведенная формула дает завышенную оценку практически достижимых значений Q, поскольку предполагается, что весь объем заполнен проводящим материалом, и не учитывает эффект близости и скин-эффект, а также потери в конденсаторе. Тем не менее эти значения приводят к рабочей системе. Поскольку динамический дипольный момент, например, LC-генератора, равен Q, умноженному на произведение внешнего магнитного поля на объем, сигнал масштабируют с использованием r5, в то время как в случае механического генератора колебаний (энергии накоплена в упругости) сигнал масштабируют с использованием r3, и в случае вариантов реализации, например, описанных со ссылкой на Фиг. 1 (магнитомеханический генератор колебаний, энергия накоплена в магнитном поле), сигнал масштабируют с использованием r2, т.к. частота обратно пропорциональна линейным размерам. Поэтому представленное в настоящем документе предложение очень хорошо подходит для миниатюризации датчиков.
Соответственно, благодаря конструкции, предложенной, например, на Фиг. 1, удается избежать проблем, рассмотренных выше. Поскольку энергия накапливается главным образом в магнитном поле, достичь высокой добротности довольно просто. Высокие амплитуды колебаний тоже вполне возможны. Как правило, чувствительные блоки также могут использовать крепежную часть, такую как тонкий волосок, который не подвергается сильному износу. Таким образом, резонанс может быть легко изменен путем изменения магнитного поля механическим перемещением магнитов относительно друг друга. Затем это изменение может быть использовано для определения положения чувствительного блока относительно системы координат, обеспечиваемой отслеживающей системой, как дополнительно рассмотрено ниже.
В варианте реализации с фиксированной сферой фиксированная сфера может иметь диаметр 620 мкм, в то время как колеблющаяся сфера 108 может иметь диаметр 500 мкм. Магнитный момент колеблющейся сферы 108 может составлять m≈70 мкА⋅м2, базовая частота может составлять ƒ0≈2 кГц и добротность может составлять примерно Q≈500. Отношение сигнал-шум (SNR) зависит от расстояния между а) катушкой, используемой для считывания резонансной частоты, и b) чувствительным устройством, а также от параметров катушки. Для переносной катушки диаметром 10 см с 200 витками и сопротивлением 10 Ом теоретически достижимое SNR на расстоянии около 30 см и продолжительности отбора пробы 0,1 с составляет примерно 4000. Однако типичные значения SNR демонстрационного устройства с фиксированной сферой могут быть от 10 до 100, если меры для подавления фонового сигнала практически не были реализованы. Поэтому шум главным образом определяется флуктуациями гармоник питания от электросети. При уменьшении диаметров сферы наполовину, т.е., например, до 250 мкм для колеблющейся сферы, магнитный момент может составлять m≈9 мкА⋅м2, базовая частота может составлять ƒ0≈4 кГц, добротность может оставаться неизменной, а теоретическое SNR может упасть примерно до 1000.
Существуют несколько способов прикрепления крепежной части к выполненному с возможностью вращения магнитному объекту 508.
Например, можно использовать крепление со сквозным отверстием. В этом случае отверстие просверливают через центр тяжести и примерно перпендикулярно намагниченности. Хотя материал магнита твердый и хрупкий, существует несколько способов сверления отверстий, таких как импульсная лазерная или электроразрядная механическая обработка (Electrical Discharge Machining, EDM). Нить пропускают через отверстие и приклеивают на место. Пропускать насквозь лучше всего с использованием процесса вакуумного всасывания. Можно использовать несколько типов клея. Экономичны легко отвердевающие клеи. Они должны иметь низкую вязкость, чтобы заполнить отверстие с нитью под действием только капиллярной силы. Дополнительно или в качестве альтернативы крепежная часть может быть зафиксирована на магнитном объекте 508 механическими средствами, например, за счет узла на нити или некой другой толстой части в нити, такой как капля клея или сформированный теплом (выплавленный) пузырек. Последнее особенно легко делается в волокнах из сверхвысокомолекулярного полиэтилена (СВМПЭ). Этот способ прикрепления снижает магнитный дипольный момент лишь на небольшую долю и поэтому сохраняет хороший сигнал. Форма магнитного объекта не сильно меняется, что может быть важно в случае сфер.
Также может быть использовано крепление зажимом. В этом случае магнитный объект делят по меньшей мере на две составляющие. Предпочтительно плоскость деления формируют ортогонально намагниченности и параллельно направлению прикрепления нити. Нить, т.е. волосок, располагают на этой плоскости. Точное выравнивание не требуется. Вторую магнитную часть помещают сверху. Магнитные части обычно удерживаются вместе магнитными силами. Наконец, наносят клей, чтобы закрепить все на месте. Предпочтительные типы клея те же самые, что и в процессе крепления сквозь отверстие. Кроме того, можно выточить канавку в одном или обоих магнитных объектах, чтобы уменьшить общий зазор между магнитными объектами. Это способ дает почти такие же хорошие результаты, что способ со сквозным отверстием, но не требует специального оборудования для изготовления. Обычно половины магнитного объекта изготавливают не путем разделения одного полного магнитного объекта, а путем стачивания двух (идентичных) магнитных объектов. Недостатком является расточительность этого процесса, так как используют два исходных объекта, к тому же он может быть несколько более трудоемким.
Самым дешевым способом является непосредственное прикрепление нити к магнитному объекту 508 с помощью подходящего клея. Магнитный объект 508 удерживают и выравнивают в каком-либо инструменте. Обе функции могут быть реализованы посредством подходящих магнитных полей. Инструмент может иметь форму воронки, причем нить, проходящую через воронку и магнитный объект, прикрепляют к отверстию воронки с помощью магнитных сил. Клей наносят в воронку и отверждают. Затем сборку извлекают из инструмента и обрезают ненужную часть нити. Этот способ может быть очень дешевым и использует магнитный объект в полной мере. Недостатком является добавление значительного количества материала, снижающего частоту колебания и требующего места в готовом устройстве.
Еще в одном варианте реализации могут быть использованы конструкция для крепления и дополнительное приклеивание. Нить можно прикрепить к магнитному объекту 508, сначала прикрепив ее к немагнитному объекту, а затем приклеив немагнитный объект к магнитному объекту. Немагнитный объект может быть изготовлен литьем под давлением или эквивалентным дешевым способом. Форма немагнитного объекта должна обеспечивать возможность простого прикрепления нити, т.е. она может иметь отверстие или зажимной механизм, возможно, даже такой простой, как насечка. Затем немагнитный объект приклеивают к магнитному объекту. В альтернативном варианте реализации он может быть соединен зажимом или привинчен к магнитному объекту. Этот способ простой и дешевый, но для некоторых областей применения может потребоваться слишком много дополнительного места.
В принципе, все рассмотренные способы прикрепления нити к магнитному объекту применяются точно также для прикрепления нити к корпусу. Однако, так как работать с материалом корпуса обычно проще, способ со сквозным отверстием может быть хорошим выбором. Крепление зажимом тоже хороший вариант. Это может быть дешевле, но окончательно запечатать труднее.
В варианте реализации согласно Фиг. 1 по меньшей мере стенка 515 корпуса 502 маркерного устройства является жесткой стенкой, чтобы не воспринимать внешнее давление. Это позволяет избежать изменений механического колебания магнитного объекта 508 из-за воздействий внешнего давления, поскольку расстояние между магнитным объектом 508 и блоком восстанавливающего крутящего момента в виде магнитного объекта 507 поддерживается постоянным, и поэтому магнитная сила, действующая между этими двумя магнитными объектами, не изменяется из-за (вызванных давлением) изменений расстояния между сферами. Соответственно, на резонансную частоту также не влияют никакие изменения расстояния между сферами. Это означает, что механические колебания магнитного объекта, вызываемые взаимодействием внешнего магнитного или электромагнитного поля возбуждения и поля восстанавливающего крутящего момента магнитного объекта 507, в основном зависят от положения и/или ориентации маркерного устройства относительно поля возбуждения и, следовательно, допускают перевод в систему координат, обеспечиваемую отслеживающим устройством.
Вышеописанное маркерное устройство может быть использовано для прикрепления к любого рода медицинскому устройству, подлежащему отслеживанию во время медицинской процедуры. С этой целью на Фиг. 2 и 3 схематически показано маркерное устройство 501, которое прикреплено к медицинскому устройству 510. В конкретном варианте реализации, показанном на Фиг. 2 и 3, медицинское устройство 510 соответствует проволочному направителю. Однако следует понимать, что медицинское устройство также может быть медицинским устройством любого другого вида, в частности медицинским прибором любого другого вида, даже более конкретно - медицинским прибором любого вида для выполнения (минимально инвазивной) хирургии, для которого может быть полезным отслеживание. В некоторых вариантах реализации маркерное устройство может быть также использовано для отслеживания другого элемента, такого как ткань, повязка и т.п. Примеры других устройств и/или элементов, подлежащих отслеживанию, приведены на Фиг. 4-6 и дополнительно рассмотрены ниже.
Как отмечалось, в конкретном варианте реализации, показанном на Фиг. 2 и 3, маркерное устройство 501 прикреплено к медицинскому устройству 510, соответствующему проволочному направителю. Части 511 и 512 проволочного направителя 510 могут быть использованы как корпус 502 маркерного устройства 501 с фиксированной магнитной сферой 507 в качестве блока восстанавливающего крутящего момента, и выполненной с возможностью вращения магнитной сферой 508, прикрепленной к жесткой стенке 515 посредством крепежной части 506, в качестве магнитного объекта, прикрепленного к проволочному направителю.
Размеры, показанные на Фиг. 2 и 3, приведены только для примера. Размеры могут быть также другими. Однако показанные размеры вполне подходят для выполнения отслеживания во время интервенционной процедуры на пациенте-человеке. Применение правил масштабирования к наблюдаемому SNR демонстрационного устройства показывает, что указанные размеры обеспечат достаточные SNR и точность для дистанционной работы на расстояниях, достаточно больших, чтобы полностью проникнуть в пациента. Таким образом, маркерное устройство 501 может быть прикреплено к проволочному направителю, тем самым позволяя отслеживать проволочный направитель во время интервенционной процедуры.
Использование маркерного устройства может быть полезным и для других медицинских устройств и/или других элементов, как показано на Фиг. 4-10.
В этой связи на Фиг. 4 показано по меньшей мере одно маркерное устройство 501, которое прикреплено к ультразвуковому зонду 610 для отслеживания указанного ультразвукового зонда 610 во время ультразвукового измерения на пациенте 100.
На Фиг. 5А показано вышеописанное маркерное устройство 501, прикрепленное к стилету 710, который используют для введения в ткань пациента. В варианте реализации на Фиг. 5А одно маркерное устройство, прикрепленное к первой концевой части 711 стилета 710, используют для отслеживания стилета при введении в ткань пациента. В альтернативном варианте реализации, как показано на Фиг. 5В, к стилету 710 могут быть прикреплены множество маркерных устройств 501, 501', 501'' вдоль длины стилета 710 от первой концевой части 711 до второй концевой части 712. Это множество маркерных устройств 501, 501', 501'' может позволить отслеживать положение стилета 710 относительно системы координат, обеспечиваемой отслеживающей системой, но также может позволить определять ориентацию и/или форму стилета 710.
На Фиг. 6 схематически показано использование маркерного устройства 501 для отслеживания ткани. Точнее говоря, в приведенном в качестве примера варианте реализации на Фиг. 6 маркерное устройство 501 используют для определения положения и/или ориентации опухоли 810. В таком случае блок 900 определения положения отслеживающей системы используют для определения положения маркерного устройства и, следовательно, опухоли 810 относительно системы координат, обеспечиваемой отслеживающей системой (не показана). Это может позволить точнее локализовывать опухоль 810 для последующего удаления. В целях иллюстрации размеров маркерного устройства 501, используемого для локализации опухоли, на Фиг. 6 также показано маркерное устройство 501 относительно пальца 101 человека. Как можно понять из этого иллюстративного представления, маркерное устройство 501 имеет минимальные размеры, в то же время обеспечивая точную локализацию.
На Фиг. 7 схематически показан еще один вариант реализации для использования маркерных устройств 501, 501', 501'', 501''' для выполнения определения положения, а также управления терапией во время лечебной процедуры, выполняемой на пациенте. В таком случае информацию, предоставляемую маркерными устройствами 501, 501', 501'' и 501''', прикрепленными к простате 102 пациента, объединяют с информацией с дополнительных датчиков, таких как датчик давления, датчик температуры, датчик излучения и т.п. Эта комбинация позволяет определять положение и/или ориентацию простаты 102 относительно системы координат, обеспечиваемой отслеживающей системой, и дополнительно измерять с помощью вышеупомянутых датчиков параметры, такие как температура, давление или излучение, благодаря чему эти измерения могут быть коррелированы с конкретными положениями. Это позволяет получать пространственное картирование этих измеряемых параметров. Такое пространственное картирование может позволить управлять лечебной процедурой и/или контролировать ее ход.
В частности, на Фиг. 7 показана простата 102 пациента. В конкретном варианте реализации согласно Фиг. 7 производят процедуру абляции на ткани простаты. Для этой цели предусмотрены множество маркерных устройств 501, 501', 501'' и 501''' в нескольких положениях простаты 102. Кроме того, в разных положениях простаты, предпочтительно возле представляющей интерес области, в которой проводится процедура абляции, предусмотрены один или более датчиков температуры (не показаны). Это позволяет обеспечивать пространственное картирование изменения температуры во время процедуры абляции и может помочь избежать вызываемых температурой повреждений здоровой ткани и/или перегрева во время процедуры абляции.
На Фиг. 8 схематически и в качестве примера показан вариант реализации проволоки для лечения аневризмы сосудов головного мозга. Проволока 910 содержит один или более маркерных устройств 501, 501', 501'' в соответствии с описанными вариантами реализации. В частности, первое маркерное устройство 501 на первом концевом участке 911 проволоки 910 на одной стороне этого первого концевого участка 911. Кроме того, другое маркерное устройство 501' может быть прикреплено ко второму концевому участку 912 проволоки 910, а на промежуточной части проволоки 910 может быть установлено еще одно маркерное устройство 501'', причем проволока 910 может содержать внутреннюю полость, в которой расположено маркерное устройство 501''.
На Фиг. 9 схематически и в качестве примера показан вариант реализации печеночного шунтирующего устройства 1100, содержащего проволочную конструкцию 1103. В этом варианте реализации проволочная конструкция 1103 имеет первую часть 1101, окруженную облицовочным материалом, и оголенную вторую часть 1102. В этом варианте реализации первая часть 1101 облицована политетрафторэтиленом (ПТФЭ). Кроме того, в этом варианте реализации первая часть 1101 проволочной конструкции имеет отдельные проволоки, в то время как во второй части 1102 проволочной конструкции 1103 проволоки взаимопереплетены. Печеночное шунтирующее устройство 1100, которое также может называться просто печеночным шунтом, содержит несколько маркерных устройств 501, 501', 501'', 501'''. Например, первое маркерное устройство 501 расположено рядом с соответствующей проволокой первой части 1101 проволочной конструкции 1103 внутри трубки из ПТФЭ. Второе маркерное устройство 501' расположено «в проволоке» внутри трубки из ПТФЭ, т.е. маркерное устройство 501' расположено между двумя концами соответствующей проволоки проволочной конструкции 1103. Далее, третье и четвертое маркерные устройства 501'', 501'''' расположены на второй части 1102 шунтирующего устройства. За счет размещения маркерных устройств вдоль длины шунтирующего устройства можно определить его положение и/или ориентацию. Кроме того, можно определить форму шунтирующего устройства 1100.
Следует отметить, что на Фиг. 4-9 расположения маркерных устройств приведены только для примера, т.е. можно расположить больше или меньше маркерных устройств в тех же самых или других положениях на соответствующем медицинском устройстве и/или элементе или внутри него. Соответствующее устройство может также содержать только одно маркерное устройство. Одно или несколько маркерных устройств, прикрепленных к соответствующим медицинским устройствам и/или элементам, представляют собой маркерные устройства в соответствии с одним или более описанными вариантами изобретения.
Далее предполагается, что длина маркерного устройства всегда почти в два раза больше диаметра. Все устройства диаметром 0,3 мм или более позволят отслеживать в режиме реального времени (более 10 считываний в секунду) на расстоянии более 30 см с высокой точностью.
Маркерное устройство может быть прикреплено к проволочному направителю, например, как объяснено выше с ссылкой на Фиг. 2 и 3, и использоваться для отслеживания такого проволочного направителя. Кроме того, маркерное устройство может быть использовано для отслеживания катетера. Маркерное устройством также может быть помещено на стент. Чтобы свести к минимуму обусловленные маркерным устройством помехи во время установки стента, маркерное устройство должно быть как можно меньше и не должно превышать диаметров проволоки стента. Типичные диаметры проволоки стента составляют от 0,2 до 0,5 мм. Следовательно, это будет полезный диапазон для диаметров маркерного устройства. Маркерное устройство можно также ввести шприцем, причем маркерное устройство может быть вставлено в более мелкий сосуд в области легких или печени без риска для пациента. Типичные диаметры для инъекции составляют от 0,3 до 1,0 мм.
Описанные маркерные устройства предпочтительно выполнены с возможностью компенсации зависимости резонансной частоты от температуры. Один возможный способ компенсации вызванных температурой сдвигов резонансной частоты будет описан далее со ссылкой на Фиг. 10.
И на Фиг. 10 тоже маркерное устройство 3001 содержит корпус 3002 и магнитный объект 3004, расположенный внутри корпуса 3002 таким образом, он выполнен с возможностью поворота из равновесной ориентации, если на магнитный объект 3004 действует внешний магнитный крутящий момент. Маркерное устройство 3001 также содержит блок 3003 восстанавливающего крутящего момента, выполненный с возможностью обеспечения восстанавливающего крутящего момента для принудительного возврата магнитного объекта 3004 в равновесную ориентацию, если внешнее магнитное или электромагнитное поле повернуло магнитный объект 3004 из равновесной ориентации, чтобы обеспечить вращательное колебание магнитного объекта 3004, возбуждаемое внешним магнитным или электромагнитным полем, приводящее к соответствующему магнитному крутящему моменту. В данном варианте реализации корпус 3002 является цилиндрическим, а магнитный объект 3004 выполнен с возможностью вращения вокруг виртуальной оси вращения, проходящей по центру магнитного объекта 3004, причем магнитный объект 3004 осесимметричен относительно виртуальной оси вращения. В частности, в этом варианте реализации магнитный объект 3004 представляет собой магнитную сферу.
Блок 3003 восстанавливающего крутящего момента содержит дополнительный магнитный объект 3003 для обеспечения восстанавливающего крутящего момента. В частности, магнитный объект 3004 прикреплен к одному концу крепежной части 3007, такой как волосок, а другой конец крепежной части 3007 прикреплен к корпусу 3002. Крепежная часть 3007 выполнена с возможностью предотвращения касания магнитным объектом 3004 дополнительного магнитного объекта 3003 из-за их магнитного притяжения, и обеспечения вращательного колебания магнитного объекта 3004. В этом варианте реализации дополнительный магнитный объект 3003 жестко прикреплен к корпусу 3002 клеем 3009.
Магнитный объект 3004 образует первый магнитный диполь, дополнительный магнитный объект 3003 образует второй магнитный диполь, причем магнитный объект 3004 и дополнительный магнитный объект 3003 расположены так, что в равновесной ориентации первый и второй диполи указывают в противоположных направлениях, Первый магнитный объект 3004 и второй магнитный объект 3003 представляют собой постоянные магниты, причем в равновесной ориентация северный полюс магнитного объекта 3004 обращен к южному полюсу дополнительного магнитного объекта 3003, и наоборот.
Корпус 3002 цилиндрический, причем цилиндрический корпус 3002 содержит две торцевые поверхности 3030, 3031, и при этом дополнительный магнитный объект 3003 жестко прикреплен к первой торцевой поверхности 3030, а конец волоска 3007, который противоположен концу, прикрепленному к магнитному объекту 3004, прикреплен ко второй торцевой поверхности 3031 цилиндрического корпуса 3002.
В этом варианте реализации вторая торцевая поверхность 3031 корпуса 3002 образована жесткой стенкой 3008 корпуса 3002, причем магнитный объект 3004 прикреплен к жесткой стенке 3008 посредством соединительной части 3007, так что воздействия внешнего давления не передаются внутренней части корпуса 3002.
Маркерное устройство 3001 также содержит магнитный материал 3005, 3006, расположенный возле дополнительного магнитного объекта 3003. Этот магнитный материал 3005, 3006 влияет на магнитное поле, генерируемое дополнительным магнитным объектом 3003, причем влияние магнитного материала 3005, 3006 зависит от температуры, чтобы изменять напряженность магнитного поля в положении магнитного объекта 3004 и, следовательно, изменять резонансную частоту, если температура изменяется. Магнитный материал 3005, 3006 выполнен с возможность уменьшения своей намагниченности с возрастанием температуры. Кроме того, магнитный материал 3006 выполнен таким образом, что его направление намагниченности противоположно направлению намагниченности дополнительного магнитного объекта 3003, а магнитный материал 3005 выполнен таким образом, что его направление намагниченности и направление намагниченности дополнительного магнитного объекта 3003 совпадают. Поэтому магнитные материла 3005, 3006, которые представляют собой мягкие магнитные материалы, влияют на резонансную частоту в зависимости от температуры в противоположных направлениях частоты, т.е. один из этих магнитных материалов приводит к изменению в сторону более высоких частот в зависимости от повышения температуры, а другой из этих магнитных материалов приводит к изменению в направлении более низких частот с повышением температуры.
Таким образом, маркерное устройство 3001 предпочтительно выполнено таким образом, что резонансная частота не зависит от температуры. Для компенсации любых нежелательных сдвигов частоты в зависимости от температуры магнитные материалы 3005, 3006 могут быть подобраны таким образом, чтобы они обеспечивали одинаковый сдвиг частоты в противоположных направлениях частоты в зависимости от изменения температуры. В частности, магнитные материалы 3005, 3006 могут быть выбраны и расположены так, чтобы устранять любую температурную зависимость резонансной частоты маркерного устройства 3001. Кроме того, возможно также использование только одного из магнитных материалов, т.е. только магнитного материала, уменьшающего резонансную частоту с увеличением температуры, или только магнитного материала, увеличивающего резонансную частоту с увеличением температуры, чтобы уменьшить или даже устранить температурную зависимость резонансной частоты маркерного устройства 3001. Один из магнитных материалов 3005, 3006 или оба можно рассматривать как компенсирующие элементы для компенсации вызываемого температурой сдвига резонансной частоты.
На Фиг. 11 схематически и в качестве примера показана отслеживающая система 1501 для отслеживания маркерного устройства, как описано ранее, т.е. отслеживающая система для беспроводного определения положения и/или ориентации маркерного устройства, прикрепленного к медицинскому устройству, на основе одного или более электрических сигналов отклика, которые указывают частоту отклика колебания магнитного объекта в чувствительном блоке. На Фиг. 12 в качестве примера показан прототип отслеживающей системы 1501. Отслеживающая система 1501 содержит, по сути, по меньшей мере один генератор поля для генерирования магнитных полей и по меньшей мере один датчик магнитного поля, т.е. преобразователь для преобразования магнитного или электромагнитного поля, генерируемого индуцируемыми колебаниями магнитного объекта чувствительного блока, в электрические сигналы отклика.
Рабочая полоса частот находится в низком килогерцевом диапазоне и должна быть достаточно широкой, чтобы охватывать отклики нескольких датчиков, работающих параллельно на различных частотах, и, возможно, также более высоких гармоник резонансной частоты датчика, например, для улучшения SNR. Передаваемые амплитуды поля составляют максимум несколько миллитесла, в то время как амплитуды поля, подлежащие обнаружению, находятся в диапазоне от 1/10 нТл до нескольких нТл. Может работать множество различных генераторов поля (колеблющиеся постоянные магниты, катушки с сердечниками/без сердечников, магнитострикционные модуляторы поля,…), а также множество различных магнитометров (датчики на эффекте Холла, магниторезистивные датчики различных видов, магниторезонансные датчики, сверхпроводящие квантовые интерферометрические датчики (SQUID) и т.д.). Самые простые с технической точки зрения системы представляют собой токопроводящие витки без сердечника для передачи и приема магнитных полей. Для применения в датчиках обычно вполне подходят катушки. Катушка для генерирования магнитного поля может также использоваться для приема магнитного поля. Однако для этих задач могут быть использованы разные катушки, что дает некоторое преимущество.
На Фиг. 11 отслеживающая система 1501 содержит передающую катушку 1503, которая соединена с микроконтроллером 1507 посредством цифро-аналогового преобразователя (ЦАП) 1506 и аудиоусилителя 1502 для генерирования внешнего магнитного или электромагнитного поля возбуждения для маркерного устройства 1520, которое может быть реализовано, как описано выше. Приемная катушка 1504 также соединена с микроконтроллером 1507 посредством малошумящего усилителя 1505 и аналого-цифрового преобразователя (АЦП) 1508 для считывания резонансной частоты. Микроконтроллер 1507 соединен с оборудованным дисплеем компьютером 1509. Например, микроконтроллер 1507 выполнен с возможностью формирования и приема сигнала, оценки частоты и управления ею. На Фиг. 12 также показано развязывающее устройство передачи/приема.
Микроконтроллер 1507 генерирует импульсы передачи (см. верхнюю кривую 1350 на Фиг. 13 Еггог! Reference source not found.), которые усиливаются аудиоусилителем 1502 и затем передаются передающей катушке 1503, которая также может называться катушкой возбуждения. В данной реализации используют отдельную приемную катушку 1504, которая развязана с передающей катушкой 1503 с помощью двух дополнительных развязывающих катушек 1510, которые не показаны на Фиг. 11 для ясности. Принятый сигнал подают в малошумящий усилитель 1505 и передают в АЦП 1508 микроконтроллера 1507, где отбирают образец кривой зависимости от времени, обычно длительностью 1/20 секунды, с частотой около 20 кС/с. На Фиг. 13 помимо импульсов 1350 передачи, которые можно называть импульсами возбуждения, показано индуцированное напряжение 1351 в приемной катушке 1504, обусловленное колебанием сферы в датчике и, следовательно, обусловленное откликом датчика. Интервал между импульсами 1350 возбуждения может непрерывно регулироваться микроконтроллером 1507.
В вариантах реализации, описанных в настоящем документе, отслеживающая система может, в частности, соответствовать многокатушечной системе. Использование нескольких катушек позволяет определять положение маркерного устройства путем определения положения и ориентации колеблющегося магнитного диполя в пространстве. Различные амплитуды принимаемых сигналов вместе с известными чувствительностями элементов катушки могут быть сопоставлены модели диполя для определения параметров положения и ориентации. На Фиг. 14 показан пример многокатушечной системы для реализации в подушке или матрасе. При наличии множества катушек и каналов дополнительная информация может быть использована также для улучшения подавления фонового сигнала, как описано дополнительно ниже.
На Фиг. 14 несколько катушек 1652 образуют многокатушечный массив, который встроен в матрас 1651 подвижного стола системы 1650 формирования изображения, такой как система с С-дугой, Катушки 1652 предпочтительно представляют собой алюминиевые катушки с поглощением рентгеновского излучения менее 10 процентов. Поэтому при использовании катушек 1652 увеличивать дозу пациента не требуется.
Далее в качестве примера будет подробно описана основанная на катушке система передачи отслеживающей системы. Система передачи на основе катушки содержит усилитель передачи и катушку передачи. Необязательно включены также согласующая схема и схема «приглушения». Поскольку применительно к датчику форма передаваемого сигнала не очень критична, для этой задачи подходят множество усилителей (класса А, класса В, класса АВ, класса D и т.д., в которых используются транзисторы, вакуумные трубки, тиристоры и многие другие компоненты). Т. к. качество сигнала не критично, можно выбрать топологию усилителя с наименьшей потерей, которая представляет собой полумостовой или полномостовой усилитель, использующий переключатели с низким сопротивлением во включенном состоянии. Предпочтительными переключателями являются переключатели на полевом транзисторе со структурой металл-оксид-полупроводник (metal-oxide-semiconductor field-effect transistor, MOSFET) или на биполярном транзисторе с изолированным затвором (insulated-gate bipolar transistor, IGBT). Согласующая схема в простейшем случае представляет собой простой конденсатор, соединенный последовательно с индукционной катушкой. При условии, что усилитель работает с достаточным напряжением питания, такой согласующий конденсатор может быть опущен, или емкость может быть выбрана настолько высокой, чтобы резонансная частота катушки с конденсатором была значительно ниже рабочей частоты. Согласующая схема представляет интерес по другой причине. Медицинское оборудование всегда должно работать безопасным образом, и снижение напряжений имеет значение. Поместив конденсатор в середину катушки так, чтобы ток протекал через одну секцию катушки, затем через согласующий конденсатор, а затем во вторую секцию катушки, можно уменьшить пиковые перепады напряжения. Это тем более верно, если катушка разделена на несколько секций, каждая из которых соединена с соответствующим конденсатором. Это превращает катушку и согласующую схему в единый блок. Обычно амплитудой поля управляют с помощью широтно-импульсной модуляции, т.е. усилитель увеличивает/уменьшает ток через катушку только для части цикла или быстро чередует увеличение/уменьшение тока. Поскольку точная форма сигнала менее важна применительно к определению, ее лучше всего достигать изменением состояния только 2 раза в пределах полуволны (или 1 раз в случае полной мощности, когда длина импульса идентична длине полуволны). В идеале усилитель имеет возможность не только увеличивать или уменьшать ток, но поддерживать ток более или менее постоянным или на уровне, обуславливаемым согласующей схемой. Это достигается правильной последовательностью переключения транзисторов в полумосте или полном мосте. В целом, напряжение питания усилителя должно быть довольно низким и находится в диапазоне ниже 50 В. Кроме того, согласующая схема должна быть настроена таким образом, чтобы не превышать этот предел в 50 В в любых двух точках. Еще лучше не превышать 24 В в обоих случаях. Это означает, что количество витков должно быть минимальным. Однако пиковые рабочие токи должны превышать 10 А, лучше 100 А.
Далее будет описана изоляция передачи/приема. Важно, чтобы система передачи, т.е. генератор поля, не вносила слишком много шума в систему приема, т.е. в преобразователь для преобразования магнитного или электромагнитного поля, создаваемого индуцированными механическими колебаниями магнитного объекта чувствительного блока, в электрические сигналы оклика, когда система передачи не находится в режиме передачи, т.е. поле возбуждения не генерируется. Кроме того, усилитель передачи не должен укорачивать принимаемый сигнал или даже частично сокращать его. Для достижения этого существуют несколько возможностей. Если катушки передачи и приема разные, это две катушки можно развязать геометрическим образом (см. Фиг. 15).
На Фиг. 15 показана реализация градиентометрической конструкции приемной катушки для подавления сигнала передачи и фонового сигнала в приемном тракте. В данном случае были выбраны большие катушки 1452, которые позволяют отслеживать маркерное устройство на расстояниях примерно до 30 см над верхней катушкой. В градиентометрической конструкции используют метод геометрической развязки: витки 1451 передающей катушки соединены для создания параллельных полей, в то время как витки 1450 приемной катушки соединены для приема градиентов поля и подавления однородных полей. Эта система передачи и приема обеспечивает естественную геометрическую развязку за счет использования параллельных передающих витков и антипараллельных приемных витков, причем это можно назвать градиентометрической конфигурацией. Это приводит к естественной геометрической связи. Данная система с катушками без сердечника имеет высокую линейность. На Фиг. 15 также показаны блок 1455 постоянного тока с аудиоусилителем 1454 и фильтр 1453 нижних частот передачи. В нижней части Фиг. 15 показаны внешние витки приемной катушки 1450 и внутренние витки передающей катушки 1451.
В частности, на Фиг. 15 изображение внизу слева представляет собой крупный план средней части верхнего узла катушки. На нижнем левом изображении на самом деле можно увидеть только 1 виток катушки 1451, выглядывающей снизу. Остальные заслонены приемной катушкой, намотанной гораздо более тонкой проволокой. Схема 1455 блокировки постоянного тока просто предварительно формирует сигнал перед аудиоусилителем, поскольку сигнал для аудиоусилителя может быть сгенерирован просто на выходе широтно-импульсного модулятора (ШИМ). Фильтр 1553 нижних частот представляет собой фильтр между выходом аудиоусилителя 1454 и передающей катушкой 1451. У него два назначения. Во-первых, предотвращение наводки высокочастотного шума, во-вторых, объединение двух выходных каналов аудиоусилителя в один.
Геометрическая развязка не всегда возможна, особенно в случае использования массива передатчиков и приемников. В этом случае может быть введен трансформатор с выводами, соединенными как со схемой передачи, так и со схемой приема. Этот трансформатор обеспечивает развязку систем передачи и приема. Решение с трансформатором может быть использовано, даже если используется объединенная катушка передачи/приема. Трансформатор можно заменить емкостной (или даже резистивной) схемой развязки, как при объединенных, так и при раздельных передающих/приемных катушках. Недостатком методов компенсации является то, что они требуют довольно много места, добавляют шум и в случае емкостной развязки сужают частотный рабочий диапазон отслеживающей системы. Более надежным и дешевым решением является добавление схемы, которая полностью заглушает усилитель передачи во время приема. Для этого можно добавить перекрестные диоды на выходе усилителя. В частности, полезны диоды с низкой емкостью при нулевом напряжении, такие как PIN-диоды. Это обеспечивает высокий импеданс в отсутствии электрических токов. Для дальнейшего усиления этого эффекта на выходе усилителя можно установить электронный переключатель, закорачивающий все остаточные шумовые сигналы во время приема. Диоды по-прежнему обеспечивают требуемый высокий импеданс. Также можно сконструировать специальный усилитель, который полностью избавлен от шумов и обеспечивает высокий импеданс, когда не работает. В конструкциях с полумостом и полным мостом это может быть достигнуто за счет полного отсутствия операции переключения в любом компоненте во время приема, использования транзисторов с низкой выходной емкостью, наличия примерно половинного напряжения питания на выходе (выходах) в режиме приема, отсутствия шума, исходящего от входных разъемов (оптическая изоляция), и наличия напряжения питания с высокой фильтрацией (сильная фильтрация или отсутствие переключения питания во время операции приема).
Далее будет подробно описана основанная на катушке система приема отслеживающей системы. Приемный усилитель должен быть малошумящего типа. Однако требования не столь высоки, чтобы нельзя было использовать обычные приемные транзисторы. Обычно вполне подходят стандартные биполярные или кремниевые полевые транзисторы с управляющим р-n переходом (ПТУП). Единственные особенности заключаются в том, что усилитель должен выдерживать передачу импульсов и начинает работать вскоре после импульса передачи. Существуют несколько способов достижения этой цели. В случае развязанных систем передачи/приема (включая объединенную катушку передачи/приема со схемой развязки) приемный усилитель не нуждается в особых функциях для достижения этой цели. Если развязка отсутствует, усилитель может быть укреплен для импульса отправки. Это можно сделать добавлением подходящего конденсатора к выходу усилителя и перекрестных диодов ко второму выводу. Это обеспечивает подходящий высокий импеданс в случае передачи и закорачивает все высокие напряжения до безопасных для усилителя уровней. Естественно, добавляемый конденсатор должен иметь номинал, подходящий для максимального напряжения передачи. Значение емкости должно быть настолько высоким, чтобы сигнал в усилителе не слишком сильно снижался в случае приема. Для усилителя на базе ПТУП эта проблема обычно не критична. Перекрестные диоды могут быть дополнены или заменены подходящим электронным переключателем, например оптопарой с выходом MOSFET. Это дает преимущество, заключающееся в дальнейшем снижении входного напряжения. Если все сделано правильно, усилитель приема не будет насыщен и заработает сразу после того, как сигнал передачи достаточно ослабнет.
Далее будет подробнее рассмотрен интерфейс с цифровой системой, причем сначала описаны вывод и обработка цифрового сигнала. Хотя выходные сигналы могут генерироваться аналоговой системой таймера, обычно будет использоваться цифровая система, такая как цифровой процессор сигналов (digital signal processor, DSP) или программируемая пользователем вентильная матрица (field-programmable gate array, FPGA). В зависимости от типа выходного усилителя могут быть использованы разные выходы. Для аналогового усилителя может быть использован АЦП некоторого типа. Поскольку качество выходного сигнала не очень критично, может быть достаточно простого аналогового выхода типа ШИМ. Для сопряжения цифровых усилителей лучше всего использовать цифровую выходную линию. Однако для них также можно использовать аналоговый выход и реализовывать генератор схемы переключения на усилителе. При использовании наилучшего согласующего усилителя, полумостового или полномостового, схему переключения лучше всего создавать в цифровой системе. Кроме того, схемы переключения для защиты входа приемного усилителя и устранения шума выхода передающего усилителя могут формироваться непосредственно цифровой системой. Общей особенностью всех вариантов выхода является то, что они должны быть достаточно быстрыми, чтобы точно сохранять фазы при различных возбуждениях одного маркерного устройства или между различными маркерными устройствами. Поэтому выход должен иметь возможность обновлений переключения на растре мельче, чем 10-я часть времени полного периода, лучше мельче, чем 100-я часть времени полного периода. Для устройства с чувствительностью, скажем, 2 кГц, это означает обновления на растре мельче 220 кГц, еще лучше 200 кГц. Это не означает, что каждый раз в точках растра должны быть возможны изменения состояния переключения. Поэтом, например, можно иметь последовательный интерфейс для каждого усилителя, который передает новое состояние переключения усилителю, и протокол для исполнения этого изменения в определенное время по этому же последовательному интерфейсу. Это особенно полезно для типа усилителя, который естественным образом отключается во время фазы приема. Для этого может быть реализован 1-битовый последовательный интерфейс, для которого требуется только одна оптопара в усилителе. Это упрощает достижение устойчивости к шуму со стороны цифровой передачи, поскольку паразитная емкость в одной оптопаре может быть очень низкой.
Далее будет рассмотрен аналого-цифровой интерфейс. Аналого-цифровое преобразование является довольно стандартным. Поскольку сигнал узкополосный, по меньшей мере в случае использования только одного маркерного устройства, сигнал можно было бы микшировать с понижением до уровня, близкого к постоянному току, и отбирать этот сигнал. Однако сигнал из маркерного устройства имеет довольно низкую частоту, обычно ниже 10 кГц. В настоящее время существует множество подходящих микросхем АЦП для отбора его непосредственной дискретизации. В частности, поскольку цифровая обработка сигнала сильно уступает аналоговым фильтрам, лучше всего использовать избыточную передискретизацию в АЦП. Следует использовать частоту, по меньшей мере в 10 раз превышающую частоты маркерного устройства, но превышение в 100 или 1000 раз тоже подходящие варианты. Сильная передискретизация делает конструкцию входного фильтра АЦП простой и дешевой, поскольку через него должна проходить только частота сигнала датчика, а выше частоты Найквиста сигнал не должен проходить. Однако фильтрация ниже частоты датчика также полезна во избежание обычных там высоких фоновых сигналов. Высокий фоновый сигнал может снижать возможное усиление перед АЦП, увеличивая вклад шума АЦП. Шум АЦП (количество эффективных битов) и пробы сигнала должны соответствовать требуемому динамическому диапазону и ожиданиям шума. Это означает, что не должно быть насыщения АЦП при наличии максимального ожидаемого сигнала и всех составляющих шума. В то же самое время, шум квантования АЦП должен быть настолько мал, чтобы общий шум не увеличивался. В данном случае под шумом понимаются все нежелательные составляющие в записываемом сигнале, происходящие из реальных источников шума, таких как сопротивление катушек или поведение приемного усилителя. Сюда также входят составляющие помех, которые не могут быть устранены подходящей фильтрацией и вычитанием фонового сигнала. Как правило, это требование может быть удовлетворено современными микросхемами АЦП, например, 18-битовыми АЦП с частотой дискретизации 2 МС/с. Для сокращения затрат может быть полезно использовать АЦП с более низкими техническими характеристиками, но добавить управление усилением, чтобы по-прежнему достигать хороших рабочих характеристик в целом.
Далее будет рассмотрена обработка данных. Перед оценкой данных необходимо обработать исходные данные АЦП. Поскольку желательна сильная передискретизация, первым этапом обработки может быть этап прореживания. Основным его преимуществом является уменьшение размера данных и, следовательно, необходимой вычислительной мощности для последующих этапов. Необязательно этап прореживания может включать другие фильтры, т.е. полосу пропускания вокруг ожидаемой частоты сигнала. Это может упростить дальнейшие этапы обработки и уменьшить динамический диапазон сигнала, что, в свою очередь, может сэкономить вычислительную мощность (переменные с меньшим количеством битов). Еще один необязательный этап обработки данных заключается в применении обратного нелинейного фильтра для уменьшения нелинейности системы приема. Это означает, что измеряют нелинейность всей системы приема и создают вычислительный фильтр для обращения эффекта нелинейности. Это особенно полезно при использовании недорогих компонентов, поскольку они имеют обыкновение вести себя более нелинейно.
Такой нелинейный фильтр может быть использован в альтернативном варианте реализации в качестве первого этапа обработки. При использовании более одного принимаемого сигнала выполняют дополнительные этапы обработки сигнала. Если по меньшей мере один канал приема не обнаруживает сигнал от чувствительного блока и, таким образом, обеспечивает меру фонового сигнала, этот (и все другие такие сигналы) коррелируют с принятым сигналом, и коррелирующие компоненты вычитают из каналов, несущих сигнал. Это вычитание может быть выполнено во временной или частотной области или комбинации той и другой. Если нет каналов без сигнала из чувствительного блока, можно использовать стратегию обработки данных, иногда называемую «виртуальным градиентометром». При этом множество каналов разбивают на виртуальные каналы, которые представляют собой линейные комбинации физических каналов, чтобы свести к минимуму помехи сигналов, не генерируемых датчиком. Коэффициенты для линейной комбинации можно найти корреляцией сигналов каналов, исключая полосу сигнала чувствительного блока (блоков).
Кроме того, далее будет объяснена оценка данных. Частота является главным параметром, подлежащим выделению из полученного сигнала от чувствительного блока. Ввиду высокой добротности резонатора (постоянная времени вплоть до секунд) последующие импульсы возбуждения обычно воспроизводятся до полного затухания колебаний (см. Фиг. 13) и, следовательно, должны иметь правильную фазу и привязку по времени для усиления существующего колебания. Это требует выделения в режиме реального времени частоты между последующими возбуждениями. Частоту можно выделить либо с использованием алгоритма сравнения, который минимизирует разность фаз между измеряемым сигналом и предварительно вычисленными кривыми изменения во времени, охватывающими диапазон частот, или посредством анализа Фурье, который является предпочтительным способом. Частотная информация высокого разрешения может быть получена дополнением нулями временной области или интерполяцией частотной области и последующей локализацией резонансного пика в спектре с использованием либо поиска пика, либо процедуры аппроксимации кривой. Для дальнейшего улучшения точности и надежности определения частоты в оценку могут быть включены высшие гармоники обнаруженного резонансного сигнала (см. спектр в верхней правой части Фиг. 16), например, с использованием взвешенной оценки частоты на основе нескольких гармоник или путем проверки согласованности определения частоты между несколькими гармониками.
В примере, к которому относится Фиг. 16, сигнал второй гармоники на порядок величины меньше основного сигнала частоты. Поэтому требуется более хорошая фильтрация. Для оптимизации сигнала на резонансной частоте и его высших гармониках могут быть использованы различные ступени фильтра, такие как аналоговые фильтры возбуждения, например, блокировка постоянного тока и фильтры нижних частот, аналоговые фильтры приема, например, полосовые фильтры, и цифровые фильтры приема, например, фильтр с бесконечной импульсной характеристикой (БИХ-фильтры) для обработки в режиме реального времени (фильтры Чебышева типа II шестого порядка). На Фиг. 16 положение центра резонансного пика f0 определено из наибольшего пика в отфильтрованном спектре. На основе f0 вычисляют привязку по времени следующих синфазных импульсов возбуждения. Частота повторения системы составляет от 5 до 30 Гц, что обеспечивает отслеживание частотной характеристики в режиме реального времени.
На Фиг. 16 показан спектр сигнала с цифровой полосовой фильтрацией и без нее (1051 в сравнении с 1050). Точки пунктирной линии находятся в диапазоне, выбранном для оценки. Разные символы точек представляют разные типы фильтра, которые в действительности не показывают разницы и поэтому могут быть проигнорированы. На Фиг. 17 полосовой фильтр присоединен к имеющемуся в продаже малошумящему усилителю звукового диапазона типа DLPVA-100-BUN-S от компании FEMTO Messtechnik GmbH. На Фиг. 18 фактический спектр подавления 40 дБ цифрового фильтра сравнивается с диапазоном выбранной полосы. Эти две реализации не демонстрируют заметной разницы. Показанный фильтр применяется к данным, изображенным на Фиг. 16, что приводит к разнице между 1050 и 1051.
Из определенной частоты и известной временной отметки принятых сигналов можно вычислить правильную привязку по времени следующего блока импульсов возбуждения. Количество и ширину импульсов возбуждения подбирают таким образом, чтобы генерировать колебание с достаточно высокой амплитудой для получения достаточного сигнала в приемных катушках.
Далее подробно описан процесс определения положения маркерного устройства посредством отслеживающей системы и, следовательно, локализации медицинского устройства, к которому прикреплено маркерное устройство. Для такой локализации воздействия частоты либо не актуальны (кодирование чувствительности рассмотрено дополнительно ниже), либо пренебрежимо малы (кодирование градиентного поля также рассмотрено дополнительно ниже). Для локализации с использованием метода градиентного поля, который также действует на частоту датчика, в этих компенсациях нет необходимости, поскольку в нем нужно оценивать только изменение частоты в течение периода времени меньше секунды. Это изменение не сильно зависит от амплитуды колебания.
Сигнал магнитомеханических генераторов колебаний обнаруживают с помощью напряжения ui(t), индуцируемого в катушке i в результате изменения поля, обусловленного колебательным движением магнитного момента m(t) подвешенной магнитной сферы в положении r0: 
где Bs,i(r) - чувствительность катушки для катушки i обнаружения в положении r, которая в основном постоянная во времени. На последнем этапе магнитный момент был заменен с использованием

где  - единичный вектор, описывающий пространственную ориентацию намагниченности, Msat - намагниченность насыщения используемого материала (обычно от 1,30 до 1,45 Тл/μ0 для NdFeB), a Vsphere - объем магнитного объекта.
- единичный вектор, описывающий пространственную ориентацию намагниченности, Msat - намагниченность насыщения используемого материала (обычно от 1,30 до 1,45 Тл/μ0 для NdFeB), a Vsphere - объем магнитного объекта.
Из (4) следует, что для индуцирования высокого напряжения в приемных катушках желателен большой динамический магнитный момент. Поскольку размер маркерного устройства и, следовательно, магнитных сфер, которые могут быть использованы в качестве магнитного объекта и блока восстанавливающего момента, соответственно, должен быть маленьким в большинстве областей применения, сигнал может быть увеличен путем использования большой амплитуды колебания, приводящей к большому  . Однако восстанавливающий крутящий момент не увеличивается линейно с увеличением угла ϕ (т.е. амплитуды колебания) между восстанавливающим полем Brest, обеспечиваемым сферой, и намагниченностью m колеблющейся сферы:
. Однако восстанавливающий крутящий момент не увеличивается линейно с увеличением угла ϕ (т.е. амплитуды колебания) между восстанавливающим полем Brest, обеспечиваемым сферой, и намагниченностью m колеблющейся сферы:

Учитывая крутящий момент из-за трения Т=Сϕ с коэффициентом затухания С и крутящий момент требуемый для углового ускорения сферы с массой ms и радиусом rs,  , можно составить уравнение движения:
, можно составить уравнение движения:

Небольшая аппроксимация угла sinϕ≈ϕ и замена m=MsatVsphere приводят к 
Высокая добротность системы делает возможной дополнительную аппроксимацию С≈0 и позволяет вычислить угловую резонансную частоту как

Поскольку микрогенераторы колебаний обычно приводят к амплитудам, которые гораздо больше 10°, это приближение в общем случае неверно. Для больших углов восстанавливающий момент меньше, и, следовательно, происходит уменьшение частоты, приводящее к зависимой от амплитуды частоте ω(ϕmax)=ω0k(ϕmax), где k(ϕmax)<1. Более того, изменение восстанавливающего момента во время колебания вводит нелинейность в отклик датчика, которая проявляется наличием высших гармоник основной частоты в спектре.
Помимо нелинейного восстанавливающего момента сила между двумя магнитными сферами зависит от взаимной ориентации их намагниченностей:

Для данной конструкции датчика сила всегда направлена вдоль вектора, соединяющего две сферы, однако ее величина стремится к нулю при амплитуде колебаний 90° и даже переходит от притяжения к отталкиванию при более высоких углах.
Если бы поля возбуждения, генерируемые передающими катушками, имели постоянную амплитуду, амплитуда ϕmax колебания уменьшались бы с увеличением расстояния между катушкой и датчиком (уменьшением поля возбуждения), и, следовательно, частота уменьшалась бы. Амплитуда также зависит от относительной ориентации между катушками и датчиком, как показано на Фиг. 10.
Для отслеживающей системы необходимо определить ориентацию и 3D-положение маркерного устройства, как описано выше. Для локализации могут быть использованы два независимых подхода к определению положения. В некоторых случаях одного такого подхода может быть достаточно, в других ситуациях может быть полезна комбинация обоих подходов для повышения точности или для выявления систематических ошибок которые приводят к противоречащим результатам между двумя способами.
Первый подход может заключаться в определении положения/локализации на основе чувствительности катушки. Этот подход основан на использовании того факта, что каждая катушка i в массиве катушек имеет отличный от других профиль Bs,i(r) чувствительности в зависимости от ее положения и ориентации.
Согласно уравнению (3), один магнитный генератор колебаний, т.е. один магнитный объект, имеет характерное механическое колебание, которое затем создает отклик с характерной амплитудой для каждой катушки, который определяется
соответствующей ориентацией динамического дипольного момента  магнитного объекта относительно Bs,i(r). Для восстановления положения и ориентации датчика необходимо определить набор прямых функций, заданных уравнением (4).
магнитного объекта относительно Bs,i(r). Для восстановления положения и ориентации датчика необходимо определить набор прямых функций, заданных уравнением (4).
В итоге желательно получить сопоставление между 6 координатами положения и ориентации маркерного устройства в системе координат, обеспечиваемой отслеживающей системой, и амплитудами напряжения на основной частоте или высших гармониках для всех каналов приема. Следующие уравнения описывают, как избавиться от зависимости от времени в уравнении (4), чтобы нужно было учитывать только амплитуды. Начнем с включения всех аргументов, т.е. вектора r=(х,у,z)T положения и вектора ϕ=(ϕ,θ,ψ)T ориентации:

Требуемые профили чувствительности катушки можно либо вычислить из известных геометрических параметров катушки, либо измерить в определенных положениях и затем интерполировать, либо определить в комбинации обоих способов, т.е. на основе модели, которая может быть подогнана под экспериментальные результаты с помощью адекватных параметров аппроксимации. Для колебания намагниченности явное описание частоты ω и амплитуды α0 колебания в системе координат маркера будет следующим:

где штрих указывает на локальную систему отсчета маркера, и были использованы разложения тригонометрических функций в ряд для низких амплитуд а0 колебания. Тогда изменение во времени будет следующим:

где первый член характеризует отклик основной частоты, а 2-й член характеризует отклик 2-й частоты гармоник. С помощью матриц R(ϕ) поворота можно вычислить намагниченность для общей ориентации в пространстве, т.е.  =
= . Таким образом, исходя из (11) можно определить амплитуды напряжения для основной частоты и 2-й частоты гармоник следующим образом:
. Таким образом, исходя из (11) можно определить амплитуды напряжения для основной частоты и 2-й частоты гармоник следующим образом:

и

соответственно. Соответственно, общее напряжение для катушки i будет

Из набора прямых функций (14) и (15) и измеренных амплитуд отклика можно вычислить положение маркерного устройства и ориентацию маркерного устройства путем решения системы уравнений с использованием нелинейного метода решения, который является стандартным математическим способом. Точность решения улучшится с увеличением количества приемных катушек, а также ортогональности (т.е. величины разностей) между их соответствующими значениями чувствительности катушки. Несоответствие между 6 неизвестными и более высоким (или более низким) количеством каналов приема может быть учтено путем решения системы уравнений методом наименьших квадратов.
Определение положения/локализацию также можно выполнить на основе кодирования градиентного поля. В то время, как локализация с помощью чувствительности катушки основана на распределении амплитуды, воспринимаемом массивом катушек, для получения независимой информации о положении можно манипулировать частотами маркерного устройства или маркерных устройств. Для этой цели отслеживающая система может быть снабжена блоком управления, который выполнен с возможностью независимого управления каждой катушкой массива катушек, чтобы генерировать неоднородное магнитное или электромагнитное поле возбуждения, в идеале имеющее постоянный градиент поля по всему рабочему пространству. Например, это может быть достигнуто применением низкочастотных токов к выбранным катушкам массива катушек. Это дополнительное поле изменяет восстанавливающее поле Brest, действующее на колеблющийся магнитный объект и, следовательно, его частоту (уравнение 9).
Из-за неоднородного характера поля возбуждения это изменение частоты будет зависеть от положения и ориентации маркера. Последовательно выполняя управление таким образом, чтобы применять несколько электромагнитных полей возбуждения (например, градиент поля, применяемый в 6 различных ориентациях), можно определить все три положения и два из трех параметров ориентации маркера. Однако оставшийся угол может быть отложен из-за имеющего более высокий порядок отклика чувствительного блока маркерного устройства на внешние магнитные или электромагнитного поля возбуждения за счет более высоких напряженностей поля, необходимых для генерирования достаточных вкладов более высокого порядка. Основная идея кодирования относится к кодированию градиента в МРТ; таким образом, могут быть выполнены как частотное кодирование, так и фазовое кодирование.
Для частотного кодирования применяют неоднородное поле во время считывания сигнала, чтобы создать требуемое смещение частоты. Для требуемого пространственного разрешения применяемая напряженность поля должны быть адаптирована к частотной чувствительности маркерного устройства и разрешению по частоте, обеспечиваемому системой. Предположим, что чувствительность по частоте маркерного устройства, имеющего в качестве магнитного объекта сферу из NdFeB диаметром 0,5 мм, составляет  ≈ - 50 Гц/мТл. Для пространственного разрешения Δr=1 мм и предполагаемого разрешения по частоте Δƒ=10 мГц потребовался бы градиент поля приблизительно
≈ - 50 Гц/мТл. Для пространственного разрешения Δr=1 мм и предполагаемого разрешения по частоте Δƒ=10 мГц потребовался бы градиент поля приблизительно
Эта напряженность градиента примерно в 100 раз ниже градиента типичных систем МРТ. Таким образом, специализированные градиентные катушки с водяным охлаждением не требуются, и для генерирования поля могут быть использованы катушки приемопередающего массива.
Для фазового кодирования применяют неоднородное поле перед считыванием сигнала, т.е. зависимое от положения смещение частоты применяют только на протяжении короткого промежутка, в течение которого зависимое от положения смещение фазы сигнала нарастает. В случае, когда разрешение по фазе недостаточное для точной локализации, можно варьировать длительность и/или амплитуду импульсов фазового кодирования при последовательных возбуждениях, чтобы можно было различать неоднозначности в нарастаниях фазы (больше чем 2π). Таким образом, за несколько считываний получают полную пространственную информацию. Для эффективной локализации фазовое кодирование с одной неоднородной структурой поля (например, кодирование одной пространственной оси) может быть объединено с частотным кодированием с другой неоднородной структурой поля (например, кодирование ортогональной пространственной оси). Если грубое положение маркерного устройства уже известно из подхода на основе кодирования чувствительности (который быстрей ввиду его параллельного характера), будет достаточно использовать только несколько этапов фазового кодирования, которые обеспечивают недостающие компоненты высокого разрешения (высокой пространственной частоты), но не полную пространственную информацию.
Как указано в настоящем документе ниже, сравнение результатов локализации, полученных кодированием градиента и кодированием чувствительности, может быть использовано для выявления систематических ошибок, например, возникающих из-за фоновых полей. Кроме того, следует отметить, что линейный отклик датчиков, использующих две подвешенные сферы, на низкочастотные внешние поля может быть подавлен; в этом случае частотный отклик более высокого порядка может быть использован для локализации или для проверок корректности. Однако чувствительность поля этих генераторов колебаний гораздо ниже, поэтому для кодирования градиентного поля потребуются поля с более высоким градиентом.
Далее будет описано определение параметров и определение положения для тесно связанных датчиков.
Определить положение (т.е. 3 параметра положения и 3 параметра ориентации) и измерить дополнительный параметр (такой, как давление или температура) особенно трудно, если используются лишь несколько катушек. Однако использование всего нескольких катушек экономически эффективно в некоторых областях применения ввиду ограничений пространства. Поэтому желательно модифицировать процедуру и оборудование обнаружения так, чтобы работать всего лишь с несколькими катушками. Один способ заключается в использовании нескольких маркерных устройств и/или датчиков в связанном виде. В «связанном» означает, что несколько датчиков/маркерных устройств, каждый из которых работает на отличной от других известной частоте, объединены в фиксированной относительной ориентации в один узел. Как правило, датчики прикрепляют к жесткой раме, но с технической точки зрения необходимо знать только относительные положения датчиков/маркерных устройств в моменты времени оценки.
При достаточном количестве датчиков положение можно определять с помощью всего двух катушек. Это проще всего увидеть при сравнении с традиционными электромагнитными системами навигации. Они, как правило, состоят из нескольких, обычно более 6, передающих катушек и одной приемной катушки, местонахождение и ориентацию которой оценивают. Однако поворот катушки вокруг ее оси (оси динамического дипольного момента) не может быть обнаружен из-за симметрии катушки относительно оси.
В этом сравнении набор жестко связанных датчиков можно рассматривать как передающий массив, а единственную приемопередающую катушку - как маркер. Таким образом, массив датчиков/маркерных устройств можно расположить где-нибудь в кольце вокруг динамической оси диполя передающей катушки. Следует отметить, что если катушка не круглая, кольца не являются идеальными окружностями, но это не меняет аргументацию. Итак, положение не может быть определено с помощью одной катушки, но при двух катушках (с непараллельными динамическими дипольными моментами) симметрия нарушается, и положение и/или ориентацию массива датчиков/маркеров можно определить.
Оценку сигналов разных датчиков лучше всего производить с использованием подхода на основе полной модели, который более подробно описан ниже. Если кратко, формируют модель каждого датчика/маркерного устройства в массиве, т.е. в виде дифференциальных уравнений. Эта модель прогнозирует отклик чувствительного блока для данного поля возбуждения. В совокупности с моделью системы передачи/приема (включая усилители, фильтры и катушки) можно предсказать общий отклик массива. Зная импульсы возбуждения за прошлые периоды времени (обычно нужно знать только импульсы для нескольких моментов времени затухания), можно вычислить ожидаемый принимаемый сигнал для положения и значения параметра маркерного устройства.
В эту процедуру можно также включить предварительные знания, т.е. разрешить только максимальную скорость перемещения датчиков относительно катушек. При этом единственным отличием от ранее описанного способа является то, что этот процесс выполняют не для датчика, а для набора соединенных в массив датчиков или для нескольких массивов одновременно. Для массива датчиков также имеется набор предварительных знаний, а именно, относительные положения и ориентации датчиков/маркеров в массиве. Особенно полезно использовать полнопараметрический подход или по меньшей мере подходы к экстраполяции частоты с нулевой амплитудой, поскольку трудно добиться одновременной работы множества датчиков с требуемой амплитудой. Однако полнопараметрическая модель до некоторой степени вычислительно затратная. Для снижения необходимых вычислительных ресурсов, возможно, было бы полезно сначала использовать отдельно объясненные ранее подходы к оценке с одним датчиком/маркером, а их результаты использовать в качестве начальных значений для окончательного восстановления положения и значения на основе полной модели.
Далее будут объяснены некоторые аспекты калибровки, при этом в первую очередь речь идет о калибровке в присутствии проводящего и мягкого ферромагнитного материала.
Наличие проводящего и особенно мягкого ферромагнитного материала может мешать локализации за счет искажения полей, создаваемых колеблющимся магнитом маркера или датчика, и/или искажения полей, генерируемых передающими катушками. В меньшей степени это может сказаться также на показаниях датчика, особенно ввиду снижения точности компенсации воздействий амплитуды. Поэтому желательна процедура калибровки полей. Кроме того, предпочтительно также иметь меру для определения того, что в данный момент могут произойти возмущения поля. Поэтому сначала рассматриваются способы обнаружения проблем с возмущением.
Как правило, отслеживающая система, которая описана в настоящем документе, использует массив катушек передачи/приема. Эти катушки могут быть отдельными катушками, предназначенными только для передачи и только для приема, или одна и та же катушка может использоваться для обеих функций. В любом случае в этой конфигурации одна катушка может передавать, а все остальные катушки непосредственно принимать отправленный сигнал. Принимаемый сигнал сравнивают с сохраненными эталонными значениями. Если фактически принятый сигнал слишком отклоняется от сохраненных значений, запускается некоторое действие, такое как предупреждение о неточности, инициирующее процесс самокалибровки или приглашение к процессу калибровки с участием пользователя, либо сочетание того и другого. Также возможна передача с участием нескольких катушек одновременно. Импульс передачи может содержать множество частот. Это может быть достигнуто генерированием импульсов или использованием качания частоты или некоторого промежуточного этапа, хорошо известного в литературе. Анализ частоты важен, поскольку вихревые токи, протекающие по проводящим структурам, сильно зависят от частоты. Таким образом, существенным изменением может быть превышение некоторого предела отношения принимаемого сигнала на двух разных частотах. Важное значение также может иметь, изменяется ли по меньшей одна составляющая спектра на определенную величину. Однако равномерное изменение во всем спектре может быть объяснено изменением усиления, например в приемном усилителе. Поэтому, если, например, конструкция приемных усилителей допускает изменения усиления, этот эффект может быть использован для установки нового значения усиления в программном обеспечении, чтобы компенсировать это изменение усиления. То же самое рассуждение справедливо, если предполагается, что изменение усиления происходит в передающем усилителе, а не в приемном тракте. В данном случае в качестве коррекции в вычислительной модели изменяют амплитуду передачи (что приводит к изменениям амплитуд колебания датчика и т.д.). Теоретически также возможно измерять импеданс одной катушки и использовать его изменение в качестве указания на изменения в среде вихревых токов. Однако электроника сама по себе не дает возможности измерения импеданса, и требуется специальное оборудование. Для обнаружения изменений в среде вихревых токов могут быть использованы не только соединения катушек, но и известные свойства сенсоров/маркерных устройств в рабочем диапазоне.
В частности, можно включить датчики в сам массив катушек приема/передачи. Полезен даже один датчик/маркер. Например, если в систему включить один маркер в фиксированном положении относительно катушки (катушек), изменение отклика маркера указывает на изменение среды вихревых токов. Еще предпочтительнее включить датчик/маркерное устройство, которое реагирует на низкочастотные магнитные поля, но слабо реагирует или вообще не реагирует на другие физические свойства, которые могут быстро меняться. Это маркерное устройство является указателем не только на статическое магнитное поле, но и на присутствие ферромагнитного материала. Для обнаружения ферромагнитного материала на катушки будут подавать не только ток на частотах колебания датчика/маркерного устройства, но и ток на гораздо более низкой частоте. Ток может подаваться на катушки одна за другой или с использованием нескольких катушек. Если измеренный отклик датчика (т.е. изменение частоты из-за прикладываемого низкочастотного магнитного поля) не совпадает с сохраненным ожидаемым значением, то поле, вероятно, искажается ферромагнитным материалом. Если в системе присутствуют достаточно катушек, то наличия зависимого от поля датчика/маркера в известном положении даже не требуется. При достаточном количестве катушек положение маркерного устройства может быть определено с использованием чувствительности катушек на частоте колебания датчика/сенсорного устройства и независимо путем использования чувствительности датчика/маркерного устройства к магнитным полям почти постоянного тока (кодирование градиентного поля).
Если положения, полученные этими двумя способами, расходятся, среда вихревого тока (или ферромагнитная среда) изменена. Однако еще лучше, если в систему включено не только одно такое маркерное устройство, а много. Лучше, если они находятся в известных положениях, а не в неизвестных положениях. Однако в отсутствии информации о положении значение только некоторых свойств положений тоже пригодится. Практический способ получения частичных знаний заключается в размещении датчиков/маркерных устройств на жесткой конструкции, которая обеспечивает их известные и стабильные во времени положение и ориентацию относительно друг друга. Такая калибровочная «рама» с датчиками/маркерными устройствами может быть размещена на постоянной основе или временно в рабочем объеме отслеживающей системы. Если отслеживающая система находит относительные положения и ориентации, которые расходятся с ожиданиями, система искажена вихревыми токами или ферромагнитным материалом.
Если, опять же, датчики/маркерные устройства восприимчивы также к магнитным полям почти постоянного тока, а в массиве катушек достаточно катушек, относительные положения датчиков/маркеров могут быть определены независимо на очень низких частотах, на которых только ферромагнитный материал искажает поля, и на резонансной частоте датчика/маркера, на которой к искажениям поля приводят как ферромагнетизм, так и вихревые токи. Следовательно, может быть сформирована информация о характере искажающих объектов, например, вносит ли вклад в искажения ферромагнитный материал.
Опять же наилучшим подходом к обнаружению искажений является полная математическая модель усилителей передачи/приема, катушек и маркерных устройств/датчиков. Эта модель включает также известные положения и ориентации, как абсолютные, так и относительные. На первом этапе оптимизируют все положения/ориентации и физические параметры так, чтобы свести к минимуму ошибки. Этот этап включает предварительные знания, например, о маркерах с фиксированным положением, прикрепленных к массиву катушек, и об относительных положениях в потенциальных системах отсчета. Кстати, «система отсчета» не обязательно должно быть чем-то, введенным только для калибровки, а маркерное устройство, состоящее из множества генераторов колебания, само может действовать как система отсчета. На втором этапе вычисляют общую взвешенную ошибку между ожидаемыми сигналами и доставленными сигналами. Если ошибка превышает определенное пороговое значение, делается вывод, что некий материал искажает поля. По характеру ошибки (т.е. возникает ли она на восприимчивых к переменному току компонентах или на восприимчивых к постоянному току компонентах) можно определить характер искажающего материала.
Далее объясняется зависимость амплитуды сигнала в различных гармониках от ориентации датчика относительно одной катушки. В частности, на Фиг. 19 показана измеренная зависимость амплитуды сигнала в различных гармониках от ориентации датчика относительно одной приемопередающей катушки. Если поле возбуждения выровнено параллельно ориентации магнитного диполя, возбуждения не происходит, и сигнал нулевой. В случае ортогонального выравнивания поля и диполя достигается самая высокая амплитуда колебания. Следует отметить, что пространственная структура четных гармоник выровнена ортогонально нечетным гармоникам. Это можно увидеть по нулю амплитуды 2-й гармоники в ориентации, соответствующей максимуму в основном сигнале (1-я гармоника) и 3-й гармонике. График соотношения амплитуд (центральный график) подчеркивает эту разницу в зависимостях от ориентации: отношение 2-й гармоники к 1-й гармонике изменяется от нуля до максимального значения (или сингулярности), в то время как отношение 3-й гармоники к 1-й гармонике остается неизменным. Знание того, что динамический отклик на четных гармониках ориентирован ортогонально динамическому отклику на нечетных гармониках, может быть использовано для определения 3-го угла ориентации чувствительного блока.
Получить положение и/или ориентацию маркерного устройства и, следовательно, медицинского устройства, к которому прикреплено это маркерное устройство можно либо кодированием чувствительности, либо кодированием градиента. В некоторых вариантах реализации может быть использована комбинация обоих способов.
Далее будет описано, как можно определить амплитуду колебания за счет использования амплитуд гармоник основной частоты.
Один способ определения амплитуды колебания заключается в оценке гармоник индуцированного сигнала в катушках. Будучи нелинейными генераторами колебаний, магнитомеханические генераторы генерируют гармоники резонансной частоты в динамическом дипольном моменте. Эти гармоники улавливаются в приемной катушке (катушках). Предпочтительно на этапе отбора проб и фильтрации принимают меры, чтобы не подавить эти кратные основной частоты Спектр гармоник зависит от особенностей датчиков. Могут быть датчики, которые преимущественно генерируют нечетные гармоники (при 3ω0, 5ω0,…), и датчики, которые генерируют четные и нечетные гармоники (при 2ω0, 3ω0, 4ω0,…). Однако могут быть сконструированы датчики смешанных типов. Динамический дипольный момент нечетных гармоник обычно выравнивается с динамическим дипольным моментом основной частоты, тогда как четные гармоники обычно выравниваются перпендикулярно динамическому дипольному моменту основной частоты и перпендикулярно оси вращения. Поэтому нечетные гармоники, по идее, проще всего использовать, поскольку отношение, скажем, динамического дипольного момента третьей гармоники к дипольному моменту основной частоты отражается как соответствующее отношение в регистрируемых напряжениях в одной катушке, например, оценивается как спектральные пиковые амплитуды. Однако, т.к. усиление в системе приема может зависеть от частоты, предпочтительно применяют коррекцию, чтобы получить истинное отношение динамического дипольного момента 3-й гармоники и динамического дипольного момента основной частоты. Это отношение может быть измерено в течение заданного периода интеграции. Для каждого датчика может быть предусмотрена калибровка этого отношения по амплитуде колебания или непосредственно по сдвигу часты, и, следовательно, применены поправки. В случае четных гармоник ситуация несколько сложнее, поскольку направление динамических дипольных моментов не выровнено с динамическими дипольными моментами основной частоты. Поэтому, как правило, необходимо использовать более одной катушки, или ориентация катушки относительно датчика должна определяться другими средствами.
Хотя при большом наборе катушек (например, ≥6) можно восстановить как положение, так и ориентацию датчика, небольшое количество катушек (например, 3-5) должно позволять восстанавливать ориентацию датчика относительно катушек с использованием способов, аналогичных способам определения положения, дополнительно описанным ниже. В таком случае истинное отношение динамических дипольных моментов для четных гармоник может быть определено с использованием чувствительностей катушек. Промежуточный этап определения ориентации может быть опущен, и с помощью методов линейной алгебры может быть установлено прямое сопоставление отношений амплитуд основной частоты и амплитуд гармоник в катушках. Должно быть понятно, что способы, описанные здесь в частотной области, могут быть сопоставлены способам в других базисах, таких как временная область. Во временной области частотный анализ сопоставляется анализу формы колебания. Эти способы сопоставления хорошо известны в математической литературе.
Далее будет описано определение амплитуды колебания на основе огибающей функции во временной области.
Другой способ определения амплитуды колебания заключается в использовании нелинейного характера затухания сигнала. Демпфирование датчика обычно нелинейное. Нелинейное затухание означает, что при двойной накопленной энергии средняя мощность рассеяния датчика не удваивается, а увеличивается несколько больше чем в два раза. Причиной этого может быть растягивание волоска из-за модуляции силы, описанной выше. Уравнение (9) показывает, что при низких амплитудах колебания сила притяжения между магнитными объектами в основном постоянная, но при более высоких амплитудах уже нет. Это изменение силы зависит в первом приближении от квадрата амплитуды колебания, соответствующего приближению функции косинуса параболой. Эта квадратичная зависимость является причиной нелинейности рассеяния. Изменяющаяся сила между магнитными объектами периодически растягивает волосок (волоски), что приводит к вкладу в рассеяние. К нелинейности могут привести также другие эффекты. В итоге эти эффекты приводят к ситуации, в которой форма огибающей кривой затухания в течение данного времени зависит от начальной амплитуды. Поэтому, если чувствительный блок маркерного устройства имеет постоянную начальную амплитуду колебания, а расстояние и/или ориентация чувствительного блока маркерного устройства изменяется относительно приемной катушки (катушек), то находят масштабированную версию первоначальной огибающей затухания. Однако, если амплитуда возбуждения чувствительного блока изменяется, то изменяется не только общая амплитуда кривой затухания, но и ее форма. Это означает, что от влияния амплитуды и влияния расстояния/ориентации можно избавиться, и, следовательно, начальная амплитуда колебания может быть восстановлена, например, с помощью таблицы подстановки предварительно записанных кривых затухания.
Это, опять же, приводит к возможности определения частоты с нулевой амплитудой или к управляемому возбуждению с постоянной амплитудой, как описано выше. Для того чтобы этот способ работал, нужна только одна катушка. Однако он в некоторой степени восприимчив к перемещению чувствительного блока во время записи, поскольку это также меняет форму огибающей. Поэтому было бы полезно включить в оценку модель вероятных перемещений чувствительного блока. Например, если известно, что чувствительный блок маркерного устройства не будет выполнять быстрых ускорений, то будет полезна коррекция огибающей кривой затухания в предположении постоянного движения.
Далее будет объяснено определение амплитуды колебания на основе отклика амплитуды сигнала на изменения в полях возбуждения.
Еще одним способом определения амплитуды колебания является анализ реакции сигнала датчика на различные напряженности магнитного или электромагнитного поля. В этом случае систематически изменяют импульсы тока и оценивают ответ датчика (датчиков) на различные импульсы возбуждения. Изменять можно ток, длительность и фазу импульсов передачи или их комбинацию. Например, предположим, что имеются два импульса возбуждения. Если расстояние большое, а локальная амплитуда поля мала, то эти два импульса предназначены для генерирования вдвое большей амплитуды, чем давал бы один импульс. Однако, если расстояние маленькое, а локальное поле на датчике велико, амплитуда будет меньше двойной амплитуды. Это приводит к характерному уменьшению принимаемого напряжения по сравнению с ожидаемым двойным напряжением. Таким образом, отношения амплитуд принимаемого сигнала (Фурье) датчиков для данной схемы возбуждения являются мерой амплитуды возбуждения и, опять же, могут быть использованы для экстраполяции на частоту нулевой амплитуды и/или для получения постоянной амплитуды возбуждения. Вдобавок ко всему можно оценить и другие величины, такие как частота и время затухания. Отношения этих величин также характерны для амплитуды колебания и могут быть использованы для экстраполяции на частоту нулевой амплитуды.
Далее будет описано определение правильного параметра на основе полной модели всех факторов, вносящих вклад.
Все способы, описанные выше, являются просто способами оценки, причем некоторые способы требуют изменений передаваемых импульсов поля. Для выполнения этих оценок не требуется изменения оборудования системы. Поэтому логично реализовать их все. Это можно сделать просто параллельным выполнением этих оценок и объединением результатов таким образом, чтобы свести к минимуму шум, т.е. выполнить взвешенное усреднение в соответствии с относительным шумом. Хотя это довольно просто и легко реализовать, при использовании действительно комплексного математического подхода, который будет описан ниже, можно ожидать лучших результатов. С другой стороны, математически сложный подход значительно труднее в реализации и может потребовать слишком много вычислительных ресурсов для выполнения на экономичном компьютерном оборудовании. Основой для правильного математического подхода является математическая модель для чувствительного блока. Эта модель прогнозирует отклик чувствительного блока на магнитные или электромагнитные поля возбуждения и текущее состояние чувствительного блока. Текущим состоянием чувствительного блока могут быть текущий угол отклонения и скорость вращения подвешенной сферы, соответствующей магнитному объекту.
В некоторых вариантах реализации необходимо также сформировать модель катушек передачи и приема, включающую характеристики фильтра и усилителя. Это можно сформулировать в виде дифференциальных уравнений, хотя здесь также нередко используют представление параметров Фурье, если системы передачи и приема достаточно линейные по своей природе.
Наконец, необходимо создать модель чувствительности катушки при передаче и приеме. Это может быть просто набор точек в пространстве с привязанной чувствительностью и алгоритм интерполяции между точками. Она также может опираться на имитации катушек на основе закона Био-Савара. Тогда эта модель может прогнозировать отклик датчика на напряжение при любых заданных месте и ориентации с данной историей импульсов возбуждения и внешних параметров. Таким образом, процедура заключается в изменении положения и ориентации датчика и влияющих на датчик физических параметров при моделировании таким образом, чтобы записываемый сигнал и имитация совпадали наилучшим образом. Можно использовать множество хорошо известных способов оптимизации, таких как градиентный спуск или случайные блуждания. Совпадение может быть определено как среднеквадратическое значение суммы разностей измеренных точек образца и смоделированных точек образца. Совпадение наилучшее, если эта величина минимальная. Наилучшее соответствие может быть изменено введением дополнительных ограничений, например, моделью ожидаемых относительных положений и ориентаций или ограничением на максимальные ожидаемые ускорения датчиков и/или моделью измеряемых величин, которая, например, дает ограничение на максимальную скорость изменения этих величин. Также может использоваться дополнительный вход датчика, например акселерометры в переносной системе катушек по меньшей мере для одного независимого ввода изменений расстояния и ориентации. Поскольку процессы оценки на основе полной модели требуют большого объема вычислений, они могут быть объединены с одним или более предыдущих способов для получения хорошей отправной точки для дальнейшей оптимизации.
Процессор может быть также выполнен с возможностью компенсации гравитационных эффектов, как будет объяснено далее.
Процессор и, более конкретно, блок определения положения также могут быть выполнены с возможностью компенсации воздействия магнитного поля Земли и других статических полей.
Статические фоновые поля добавляются к полю неподвижного магнитного объекта и, таким образом, модулируют восстанавливающее поле Brest на колеблющемся магните. Это изменяет резонансную частоту в соответствии с уравнением (8) и, следовательно, является источником ошибок при определении посредством изменений частоты генератора колебаний. Для магнитных сфер диаметром 0,5 мм, сделанных из NdFeB с намагниченностью насыщения 1,3 Тл/μ0, поля, создаваемые фиксированной сферой в центре колеблющейся сферы, составляют 16,1 мТл и 6,8 мТл при расстоянии между центрами 0,75 мм и 1,0 мм, соответственно. Магнитное поле Земли имеет значение от 25 до 65 мкТл. Разность частот между параллельным и антипараллельным выравниванием статической составляющей поля при максимальном магнитном поле Земли 65 мкТл будет давать разность частот около 5 Гц и 9 Гц для вышеуказанных расстояний 0,75 мм и 1,0 мм. Различные стратегии смягчения этой проблемы представлены далее.
Смягчение на стороне маркерного устройства заключается в применении конструкции, использующей в качестве магнитного объекта две подвешенные сферы с идентичными магнитным дипольным моментом и моментом инерции (или подходящим соотношением этих двух величин) вместо одной сферы, которая была описана ранее как магнитный объект. Поскольку противоколебание происходит на одной частоте, эффект первого порядка статического поля отклонения, такого как магнитное поле Земли, гасится.
Другой стратегией смягчения является использование в системе абсолютных датчиков поля для измерения величины и ориентации статических фоновых полей. На основе ориентации датчика, определенной с использованием ранее рассмотренных способов, можно вычислить коррекцию частоты или поля, чтобы добиться улучшенного определения положения. Для определения статических фоновых полей можно использовать любой датчик магнитного поля с достаточной чувствительностью и занимаемой площадью, который может быть интегрирован в отслеживающую систему. Одним недорогим вариантом могут быть 3-осевые датчики Холла. Альтернативой может быть 3-осевой массив микроботов с температурной компенсацией и четко определенной частотой нулевого поля.
Из изменения их соответствующих частот можно определить величину и ориентацию фоновых полей. В идеале их резонансные частоты выбирают так, что они не создают помех частоте чувствительного блока, представляющего интерес. Вместо коррекции смещения оцениваемой частоты также можно использовать катушки многокатушечных отслеживающих систем, чтобы генерировать поля смещения для уравновешивания магнитных полей Земли и других фоновых полей. Если в поле обзора существуют неоднородные поля из-за наличия ферромагнитного материала, можно использовать несколько наборов 3-осевых датчиков магнитного поля, чтобы охарактеризовать пространственные изменения поля.
Маркерные устройства должны обладать высокой добротностью и должны иметь большую частотную развертку, чтобы воспринимать измеряемую величину во всем диапазоне, требуемом для конкретного применения. Высокая добротность особенно важна при высоких амплитудах колебания, при которых генерируется самый сильный сигнал. Поскольку два магнитных объекта имеют сильные силы притяжения, и эти силы резко возрастают с сокращением расстояния (до 4-й степени расстояния, см. уравнение (9)), оба эти свойства могут ухудшиться. Сильные силы приводят к относительно сильному натяжения по меньшей мере в одном волоске, удерживающем по меньшей мере один магнитный объект. Это натяжение само по себе не приводит к пути рассеивания. Однако, особенно при больших амплитудах колебания, силы между магнитными объектами уменьшаются и, таким образом, натяжение в крепежной части периодически уменьшается. Это приводит к периодическому удлинению и сокращению соединительной части, что, как правило, может привести к выделению тепла. Следовательно, из генератора колебаний выделяется энергия. Силы также сильно зависят от расстояния между магнитными объектами и резко увеличиваются при приближении объектов друг к другу.
Для решения этой проблемы описан способ уменьшения силы и изменения силы. Он заключается всего лишь в части магнитного материала, который намагничивается в противоположном направлении возле другого магнитного объекта, как показано на Фиг. 20.
На Фиг. 20 чувствительный блок 4001 содержит магнитный объект 4008, являющийся постоянным магнитом, подвешенным с помощью крепежной части 4006, такой как волосок, который предпочтительно представляет собой высокопрочную проволоку, к жесткой стенке 4010 корпуса 4002. Жесткая стенка 4010 предпочтительно выполнена из металла или полимера, не чувствительного к воздействиям внешнего давления. Кроме того, остальная часть корпуса 4002 тоже может быть выполнена из металла или полимера. Корпус 4002 может быть заполнен газом или может обеспечивать вакуумное пространство. Еще один магнитный объект 4007 зафиксирован клеем 4011 на внутренней торцевой поверхности корпуса 4002. Два магнитных объекта 4007, 4008 обычно намагничены в противоположных направлениях. Однако неподвижный магнитный объект 4007 также содержит часть с обратной ориентацией 4012 намагниченности.
Таким образом, если задействованы две магнитные сферы, то в этом примере по меньшей мере одна сфера получает шапку, намагниченную в противоположном направлении. Эта шапка находится рядом с другой магнитной сферой. Если одна сфера неподвижна, а другая колеблется, то лучше всего иметь эту шапку на неподвижной сфере. Таким образом, динамический дипольный момент датчика не уменьшается. Только частота колебания немного ниже. Однако можно также поменять местами роли сфер. Намагниченная в противоположном направлении часть настолько мала, что при всех рабочих расстояниях результирующая сила все равно остается притягивающей. Если намагниченная в противоположном направлении часть достаточно мала, условие притяжения может удовлетворяться вплоть для касания магнитных объектов.
Существуют несколько способов создания шапок с обратной намагниченностью. Один заключается просто в добавлении некоторого магнитного материла сверху по меньшей мере одного магнитного объекта. Магнитный материал может быть магнитно-мягким или магнитно-твердым. Это может быть сплошной непрерывный магнитный объект, магнитная краска или что-то среднее. Магнитный материал обычно сам по себе выравнивается с образованием противоположной намагниченности. Кроме того, он также имеет обыкновение прилипать к магнитному объекту. Тем не менее этот дополнительный материал следует приклеить к магнитному объекту, особенно если два основных магнитных объекта могут время от времени касаться друг друга. Чтобы сохранить первоначально требуемую форму, с магнитного объекта, подлежащего изменению, может быть удалена некоторая часть материала, например шлифованием.
Существует альтернативный способ формирования зоны с обратной намагниченностью. Она может быть создана просто намагничиванием в обратном направлении требуемой зоны магнитного объекта. Это может быть достигнуто с помощью сильных импульсов тока через проводник возле магнитного объекта. Однако это не очень практично из-за чрезмерного нагрева. Это может быть достигнуто проще, всего лишь нагревом соответствующей части магнитного объекта почти до температуры Кюри или выше. Это приведет к изменению направления намагниченности на обратное. Эффект может быть дополнен применением импульсного или постоянного магнитного поля в обратном направлении. Поля также могут включать в себя сильные градиенты за счет использования некоторого твердого или мягкого магнитного материала возле воздействуемой зоны. Поскольку нагрев должен быть достаточно локализованным, повышение температуры должно быть очень быстрым, чтобы общая энергия, внесенная в магнитный объект, была низкой и не довела его весь до температуры Кюри. Подходящим источником нагревания может быть лазер. Могут подойти и методы резистивного или индуктивного нагрева.
Кроме того, некоторые подходы к определению наличия возмущений поля также могут быть хорошей отправной точкой для способов компенсации эффектов искажений поля. Пример такого способа проще всего проиллюстрировать в предположении, что присутствует материал вызывающий вихревые токи, но не ферромагнитный материал. При применении вышеописанной модели можно получить правильные положения из оценки зависящих от почти постоянного тока сигналов (кодирование градиентного поля), но неправильные положения и локальные амплитуды поля при частоте датчика и его гармониках (кодирование чувствительности катушки). Следовательно, поля более высокой частоты можно исказить таким образом, чтобы привести их в соответствии с ожиданиями. После применения искажения все положения и показания чувствительного блока улучшатся. Целесообразно не полагаться исключительно на оценку положения, основанную на магнитных полях почти постоянного тока, поскольку кодирование чувствительности переменного тока гораздо быстрее.
Наиболее критичной частью для этого способа компенсации является определение правильной модели для искажения поля переменного тока. Простым решением является параметризация функции сдвига поля, например с использованием простых 3D-много членов. Это означает использование значения поля не в фактическом положении, а в положении, преобразованном с помощью 3D-многочленов. Это эффективно с точки зрения вычислений, но может быть недостаточно понятно с точки зрения физики, и не очевидно, как, например, измерения соединений катушек могут быть включены в эту схему. Таким образом, лучше использовать модели, которые ближе к физической реальности. Например, для индуцирования требуемых искажений поля лучше использовать модель поля проводящих пластин возле системы катушек.
Таким образом, по сути положение, угловую толщину и размер некоторых виртуальных пластин изменяют до тех пор, пока не достигнут совпадения ожиданий модели и измеряемых данных. Как моделировать такие проводящие пластины, хорошо известно из литературы по электромагнитному моделированию. Моделирование такого типа обладает дополнительным преимуществом, заключающимся в простоте включения форм объектов, которые, скорее всего, будут иметь место в конкретной среде. Таким образом, если к полю обзора приближают специальное устройство, например, рентгеновскую С-дугу, это устройство известно и может быть предварительно смоделировано, так что нужно только оптимизировать точную ориентацию и положение с помощью программного обеспечения. Еще одним преимуществом является то, что положение предполагаемого искажающего объекта может быть отображено системой, или данные могут быть переданы во вторую систему, которая выполняет задачу отображения. Таким образом, пользователю могут быть конкретно указаны объекты, которые искажают измерение, и пользователь может захотеть переместить или удалить их. Во время этого процесса данные о соединении катушек действуют по сути как массив металлодетекторов. Введение ферромагнитного материала в принципе то же самое, что и проводящего материала, который создает вихревые токи. Однако моделирование ферромагнитного материала требует немного больших вычислительных затрат, и, поскольку могут отсутствовать определенные исходные положения, определяемые специальными маркерными устройствами, оно может не привести к точному положению. Но, опять же, лучше всего моделировать набор ферромагнитных материалов, таких как листы и стержни, и при моделировании помещать и деформировать их вокруг массива катушек. При этом будет весьма полезно, если для модели предоставлена база данных вероятных ферромагнитных объектов. Кроме того, процесс измерений взаимной связи может быть дополнен измерением генерирования гармоник в среде катушки. Наличие гармоник явно свидетельствует о мягком ферромагнитном материале, а измеренные сигналы дают ценные исходные данные для размера и положения объектов.
Далее будет описано генерирование импульса возбуждения.
Отслеживающая система и, при необходимости, генератор поля предпочтительно содержат программное обеспечение для генерирования привязки по времени и формы импульсов возбуждения. Этот генератор импульсов возбуждения предпочтительно знает возможности оборудования. Возможны различные типы усилителей и фильтрации. Усилитель одного типа выполнен с возможностью генерирования формы волы тока, которая точно повторяет довольно произвольную траекторию. В настоящем документе их называют «аналоговыми усилителями».
Другой способен только увеличивать ток с заданной скоростью, уменьшать его с аналогичной скоростью и поддерживать его более или менее постоянным. По сути, эти усилители прикладывают напряжение с положительным или отрицательным знаком к катушке или действуют как короткозамкнутая цепь. В настоящем документе они называются «цифровыми усилителями». Цифровые усилители могут иметь различные скорости переключения, т.е. допустимое количество изменений состояния в единицу времени. Если скорость переключения гораздо выше скорости колебания, цифровой усилитель, опять же, действует подробно аналоговому усилителю. Следовательно, усилитель этого типа можно, в принципе, рассматривать как аналоговый усилитель.
Если скорость переключения лишь примерно такая же, как частота колебания маркерного устройства, обработка должна быть немного иной. Однако, это более сложная ситуация, поэтому все обсуждение будет сосредоточено на ней. Усилитель этого типа имеет некоторое преимущество над аналоговыми усилителями. Главное преимущество заключается в том, что КПД этого усилителя очень высок и легко достигает КПД 98%. Еще одним преимуществом является очень простое взаимодействие с вычислительной системой. Между усилителем и катушкой может присутствовать согласующая схема. Простейшая согласующая схема представляет собой просто конденсатор, соединенный последовательно с катушкой. За счет использования согласующей схемы максимальный ток через катушку при данном напряжении питания возрастает. Однако такая согласующая схема имеет недостаток, заключающийся в блокировке низкочастотных токов.
Некоторые последовательности могут потребовать низкочастотных токов. Решения этой проблемы могут быть двоякими. Во-первых, может быть предусмотрена согласующая схема, которая прозрачна при высоких и низких частотах. Примером такой схемы может быть схема из катушки или последовательно соединенных конденсатора и катушки, параллельная первому согласующему конденсатору. Другой способ заключается в наличии переключателя, который обходит согласующую схему, и когда требуется почти постоянный ток, этот переключатель замыкают. В обходной путь также может быть встроен конденсатор, если резонансная частота достаточно низкая. Таким же образом с помощью множества переключателей и конденсаторов можно обеспечить целый ряд различных согласующих частот. Кроме того, следует отметить, что даже если схема настроена на почти постоянный ток, некоторый ток на частоте маркерного устройства все равно доступен. Следует отметить, что при считывании необязательно имеется возможность использовать постоянные токи. Существуют два главных аспекта для обеспечения этой возможности. Во-первых, не допускается, чтобы постоянные токи мешали считыванию. В основном эта проблема возникает, если катушки передачи и приема объединены. Источник постоянного тока может обеспечить короткозамкнутый путь сигналу. Этого нужно избегать, и правильная согласующая схема предотвращает это.
Согласующая схема должна вводить достаточно высокий импеданс между катушкой и источником постоянного тока. Это может быть достигнуто посредством последовательного соединения дополнительной катушки с индуктивностью порядка индуктивности передающей/приемной катушки. Индуктивность может иметь параллельный переключатель для короткого замыкания ее, если в ней нет необходимости. Существует множество других доступных решений. Второе условие заключается в том, чтобы источник постоянного тока не вносил слишком много шума, т.е. шум источника тока не препятствовал точному измерению маркерных устройств. Это может быть достигнуто подходящим аналоговым фильтром в случае передачи постоянного тока.
Этот фильтр может быть обойден во время передачи импульсов переменного тока с помощью подходящего переключателя (например, оптопар MOSFET). Также может оказаться возможным полностью избежать действия переключения в источнике постоянного тока во время приема сигнала и просто использовать медленно затухающий ток в катушке. Также может быть целесообразно выполнять только несколько действий переключения во время приема и просто отбрасывать принятые данные, когда они повреждены. Источники поля постоянного тока могут быть также совершенно отдельными катушками, или генераторы поля могут быть (движущимися) постоянными магнитами. Это позволяет избежать большинства проблем. Дополнительная проблема с присутствием постоянных токов во время приема сигнала заключается в том, что катушки могут обеспечивать разную среду для датчиков. Это означает, например, что некоторые катушки могут быть закорочены для переменных токов, и поле больше не может проникать в эти катушки, изменяя значения в соседних катушках. Этот эффект нужно учитывать при вычислении положений и/или ориентаций. С маркерным устройством взаимодействуют два главных элемента поля. Одним из них является амплитуда тока, близкая к постоянному току, т.е. значение тока, усредненное за время порядка 0,1 секунды (от около 0,01 секунды до около 1 секунды). Другим является амплитуда Фурье (в виде комплексного значения, поскольку фаза важна) на резонансной частоте датчиков/маркеров. Поэтому первой задачей является сопоставление этих двух значений для генерирования последовательности.
Далее будет описано сопоставление, если требуется, амплитуд и токов Фурье конкретной схеме импульсов во временной области.
Также полезно создать программную подсистему, которая выполняет сопоставление такого типа, т.е. часть программного обеспечения, которая принимает требуемые почти постоянные токи и требуемую амплитуду (и частоту) Фурье в качестве входных данных, и которая генерирует последовательности импульсов во временной области. Также желательно, чтобы это программа возвращала информацию, можно ли достичь требуемых значений в рамках накладываемых оборудованием ограничений, таких как максимальные токи или максимальный нагрев катушек, или нормативных ограничений, например нагрев пациента или стимуляция периферических нервов. Вместо простой информации да/нет может предоставляться информация о тяжести нежелательных побочных эффектов. Эта информация может быть предоставлена по каждому отдельному каналу передачи (по каждой передающей катушке). Кроме того, возвращаемым значением может быть фактические наиболее подходящие выходной постоянный ток и амплитуда (амплитуды) Фурье. Входными данными может быть не только одна комбинация из частоты и амплитуды Фурье, но и целы ряд амплитуд Фурье на различных частотах. Максимальная длина последовательности импульсов также может быть параметром, который является входными данными этой функции. Принцип работы следующий: В случае аналоговых усилителей первый результат может быть сформирован просто выполнением обратного преобразования Фурье требуемых амплитуд Фурье (и значений постоянного тока) в течение требуемого времени передачи. Если этот процесс приводит к форме волны, которая не может быть реализована ввиду некоторых ограничений, об этом сообщается, и, возможно, планируется генерирование масштабированной версии. Возможные характеристики фильтра учитываются посредством подходящей свертки. Если переключаемых состояний фильтра несколько, то можно протестировать все и выбрать то, которое предъявляет наименьшие требования к усилителю. Следует отметить, что существует несколько эвристических правил, так что в большинстве случает необязательно оценивать все состояния фильтра. Например, можно опустить фильтры с далекими резонансными частотами, если имеются фильтры получше. В случае цифрового усилителя обратное преобразование Фурье (включая воздействия фильтра) дает хорошую отправную точку для оптимизации. На этом первом этапе аппроксимации получающиеся в результате пики во временном спектре аппроксимируют двумя (или, в лучшем случае, несколькими) линейно изменяющимися участками и плоскими областями между ними. Так, например, полупериод синусоидальной волны, начинающийся с нуля и заканчивающийся нулем, аппроксимируют сначала плоским (нулевым) участком, затем линейно возрастающим участком, затем плоским участком, затем линейно убывающим участком и, наконец, плоской (нулевой) областью. Привязку по времени различных участков распределяют таким образом, чтобы достичь приблизительно такой же площади. После этой первой аппроксимации следует второй этап, на котором положения начал линейно изменяющихся и плоских частей сдвигают, чтобы достичь наилучшего соответствия с требуемыми значениями Фурье. Наилучшее соответствие может быть наименьшей суммой квадратов разности (комплексных) значений требуемых и достигнутых компонентов Фурье. Можно использовать все обычные алгоритмы оптимизации, такие как градиентный спуск.
Далее будет описано сопоставление требуемых значений Фурье в маркерных устройствах токам в катушках.
Следующим более высоким уровнем абстракции программы генерирования импульсов является часть программного обеспечения, которая в качестве входных данных требует конкретных значений Фурье поля и направлений в конкретном положении и преобразует их в требования к токам в катушке. Алгоритм оценки обычно обеспечивает некоторую меру положения и ориентации датчиков/маркеров. Положение не представляет собой и не должно быть положением в 3D-пространстве. Однако SD-положение является идеальным случаем. Например, если в наличии только одна катушка, то можно определить только значение поля в воспринимающем направлении на датчике. Тем не менее, оно также преобразуется в некоторые виртуальные положение и ориентацию в 3D-пространстве. Следовательно, эти ситуации не требуют специальной обработки в программном обеспечении. Таким образом, преобразование в требования для токов катушки является результатом процесса оптимизации. Существует модель, которая из токов в катушках вычисляет компоненты поля Фурье в конкретных положениях в пространстве. Это основа для оптимизации, причем компоненты Фурье тока катушки оптимизируют таким образом, чтобы сгенерировать требуемые компоненты поля. Обычно не существует однозначного способа формирования требуемых полей из токов катушки. Может оказаться, что требуемые токи несовместимы с ограничениями аппаратной системы. Программное обеспечение нижнего уровня возвращает значения, описывающие отрицательные эффекты, и программное обеспечение использует эту информацию для оптимизации токов. Цель оптимизации состоит в том, чтобы добиться хорошего компромисса между достигнутыми компонентами Фурье поля в маркерных устройствах и отрицательными эффектами. Это означает, что отклонение от требуемых полей и побочные эффекты объединяют в одно число, и для этого числа находят максимум и минимум с использованием стандартных алгоритмов оптимизации. Комбинацией, дающей это число, может быть взвешенная сумма квадратов. Естественно, для этой величины можно найти огромное количество рабочих математических комбинаций. Наконец, эта часть программы возвращает вызывающей программе (более высокого уровня) достигнутые поля в положениях и качественные значения, чтобы она выполнила свою оптимизацию.
Далее будет описано генерирование требуемых значений Фурье поля для маркеров/датчиков.
На этом уровне абстракции программная система фактически имеет дело с измерениями, которые нужно выполнить. Таким образом, входными данными для этой программы являются текущие требования к тому, что нужно измерить, насколько точно и как быстро. Эти требования зависят от фактической области применения датчиков/маркеров и, следовательно, не являются частью настоящего документа. Требования могут быть самыми разными. Например, если задействуют только один датчик, требованием будет, например, измерение одной величины как можно точнее, например с интервалом 0,1 секунды. Если областью применения является решение для отслеживания с множеством соединенных маркеров, желаемым результатом может быть, например, требование обновлять положения с интервалом 0,1 секунды для всего узла маркеров независимо от того, какие маркеры/датчики в нем вносят вклад в сигнал (исходя из чувствительностей катушки), а также независимая проверка положения каждую 1 секунду. Эта программа также имеет доступ к текущему состоянию датчиков/маркеров (параметры положения/колебания и т.д.) и имитационной модели, описанной в других разделах настоящего документа. На основе этого могут быть вычислены оптимальные значения Фурье поля возбуждения, включая направление для каждого маркерного устройства. Эти параметры могут быть переданы на ранее описанные более низкие уровни программного обеспечения (с желательным исполнением где-то в будущем) для генерирования, в конечном итоге, токов. В случае с одним датчиком это сработает немедленно, и план может быть записан в аппаратные буферы вывода. Однако для отслеживания, например, узла маркерных устройств, скорее всего, не существует формы импульса, которая идеально возбуждает все отдельные маркерные устройства. В частности, фаза будет подходить не для всех отдельных маркерных устройств. Поэтому программному обеспечению, возможно, придется попытаться сконцентрировать оптимальное возбуждение только на подмножестве имеющихся маркерных устройств и попытаться найти решение, которое дает рабочую последовательность импульсов. Таков общий принцип работы оптимизации данного программного обеспечения. Оно пытается изменить требуемое возбуждение различных датчиков и сосредоточиться на нескольких из их, чтобы всех же получить требуемый результат. В принципе, самый простой подход состоит в том, чтобы перебрать все возможные подмножества маркерных устройств и проверить, какое подмножество возбуждения дает наилучшую информацию о требуемых параметрах. Поскольку возможно много подмножеств, программа должна добавлять некоторые эвристические способы снижения сложности. Например, сначала можно посмотреть, какие другие маркерные устройства тоже возбуждаются, если возбуждается данное маркерное устройство, и их всегда можно сгруппировать вместе. Если найдено подходящее решение, его можно записать в буфер вывода. Включение магнитных полей почти постоянного тока может потребовать дополнительной логики в зависимости от реализации оборудования. Если оборудование выполнено с возможностью применения магнитных полей постоянного тока во время записи сигналов, от программного обеспечения не требуется делать нечто особенное помимо применения одного или нескольких градиентов во время считывания. Однако, если градиенты постоянного тока и считывание несовместимы, потребуется дополнительный этап оптимизации, на котором создают правильное поле или градиент постоянного тока в какой-то момент времени между импульсами возбуждения. Логика в основе оптимизации остается прежней. Параметры изменяют до тех пор, пока моделирование не спрогнозирует достаточно хорошее измеряемое значение для области применения.
Далее будет описана генерация начальной последовательности.
В алгоритме обычно предполагается, что для оптимизации последовательности уже имеется достаточно знаний о маркерных устройствах. Как правило, в начале последовательности они доступны не в полном объеме. Например, из применения может быть известно, сколько маркерных устройств должно присутствовать при применении, и в каком диапазоне могут быть частоты. Но точные частоты и положения не будут известны. Поэтому нужна специальная начальная последовательность, которая пытается найти все возможные маркерные устройства во всех возможных положениях. Самая простая начальная последовательность выглядит следующим образом. Рабочий объем разбивают на пространственную 3D-решетку или абстрактную решетку. Абстрактная решетка представляет собой решетку для использования в том случае, если катушек недостаточно для выполнения полного SD-кодирования. Каждую пространственную точку делят на разные направления. Программа перебирает каждое положение и каждый угол в положении и применяет наивысшую мощность передачи для данной частоты и предварительно установленного времени передачи. Затем система записывает потенциальные сигналы с датчиков/маркеров. Обычно один импульс передачи возбуждает не только одно маркерное устройство, но и многие другие одновременно. Однако эта процедура обеспечивает обнаружение также даже маркерного устройства с самым слабым возможным сигналом. Необязательный следующий этап заключается в возбуждении каждого датчика по отдельности с различными амплитудами. Из этого можно извлечь нелинейные свойства. Еще один необязательный этап заключается в возбуждении каждого маркерного устройства в присутствии поля постоянного тока или измерения фазы сигнала после поля постоянного тока (опять же, в различных направлениях), чтобы определить чувствительность маркерных устройств к магнитным полям постоянного тока. Эти основные процедуры можно сильно ускорить, используя некоторые знания о системе. Например, вполне вероятно, что если в удаленном объеме уже выполняется поиск датчика/маркера, многие или все более близкие объемы получили самую высокую возможную амплитуду по меньшей мере для некоторых углов. Поэтому к ближним объемам нужно применить только несколько оставшихся параметров. Ту же логику можно использовать для оценки нелинейного характера датчиков/маркеров или их отклика на магнитные поля постоянного тока.
Далее объясняются стратегии измерений с высоким временным разрешением.
Для многих областей применения желательно иметь высокое разрешение по времени. Итак, желательно, чтобы стратегии достигали высокого разрешения по времени с помощью магнитомеханических генераторов колебаний при определении как положений, так и параметра. Самый простой подход к получению высокого разрешения по времени заключается просто в уменьшении времени повторения. Время повторения означает период времени между последовательными импульсами возбуждения. После каждого импульса возбуждения определяют частоту и амплитуды, из которых можно вычислить физические значения и положение, как описано в других разделах настоящего документа. Однако добротность маркерного устройства обычно относительно высокая, и амплитуда колебания не сильно отклоняется во время следующего импульса возбуждения. Чтобы всегда получать требуемое возбуждение маркерного устройства, необходимо учитывать фазу следующего возбуждения. Как правило, требуется «синфазное возбуждение», т.е. возбуждение таким образом, чтобы маркерное устройство получала энергию с самого начала импульса возбуждения. Как оптимизировать привязку по времени, описано в других разделах настоящего документа. Синфазное возбуждение сводит к минимуму энергию передачи и, следовательно, длительность импульса можно поддерживать минимальной. Это увеличивает общее отношение сигнал-шум.
Высокая частота повторения имеет некоторые недостатки. Во-первых, во время и вскоре после импульсов возбуждения система, как правило, не может принимать значения и, следовательно, отношение сигнал-шум может быть неоптимальным. Во-вторых, каждый импульс передачи разрушает некоторые знания о фазе колебания датчика. Только в том случае, если импульс возбуждения и ориентация датчика строго контролируются и точно известны, информация о фазе может сохраниться до некоторой степени, однако это технологически сложно. Информация о фазе за длительный период времени может быть полезна, поскольку в ней закодирована информация о средней частоте (следовательно, о средней физической величине). Измерение средней физической величины значительно более точное при оценке интервала двойной длины по сравнению с простым выполнением оценки первой половины и второй половины по отдельности и усреднении этих двух результатов. Поэтому, возможно, целесообразно иметь не столько же импульсов возбуждения, сколько измерений, а извлекать из одного импульса сигнала более одного измеряемого значения. Это можно сделать просто путем разбиения сигнала на несколько подсекций и оценки каждой подсекции по отдельности.
Этот простой подход не учитывает, что измерения становятся лучше, если используется более длинный набор данных. Чтобы учесть это, набор можно разбить на иерархические подмножества, и каждое подмножество в каждой иерархии оценивать, а средние значения масштабировать для согласования с более длинными наборами данных. Так, например, сначала оценивают набор данных (один невозмущенный сигнал затухания) как единое целое. Затем его разбивают на два, и эти два разделенных набора данных оценивают по отдельности. После этого к каждому результату добавляют одно и то же число, чтобы их среднее значение соответствовало среднему значению полного набора. Данный процесс может быть повторен для получения, в конечном итоге, 4, 8 и т.д. подмножеств. Этот подход может быть усовершенствован математически до полной оценки на основе модели. Для этого создают модель процесса изменения физического параметра (и, возможно, также включающую пространственное перемещение датчика). Эта модель может быть многочленом определенной степени или некоторой другой подходящей математической функцией. Функция должна описывать физический характер измеряемой величины таким образом, чтобы нужно было использовать только небольшое количество параметров. Так, например, когда параметром является кровяное давление, возможно, будет лучше, если модель представлена в виде ряда Фурье, поскольку он описывает форму волны давления сердечных сокращений лучше, чем многочлены. Затем параметры варьируют, чтобы они как можно лучше соответствовали набору измеренных данных. Если в конечном итоге нужны дискретные точки измерения, их можно просто вычислить с использованием выходных данных модели для определенных моментов времени.
При осуществлении на практике настоящего заявленного изобретения изучение чертежей, описания и прилагаемой формулы изобретения специалистам в данной области позволит им понять и осуществить другие модификации описанных вариантов реализации
В формуле изобретения слово «содержащий/включающий» не исключает другие элементы или этапы, а грамматические средства выражения единственного числа не исключают множества.
Единственный блок или устройство может выполнять функции нескольких пунктов, перечисленных в формуле изобретения. Сам факт того, что определенные меры изложены во взаимно отличающихся зависимых пунктах формулы, не означает того, комбинация этих мер не может быть использована эффективно.
Определения, такие как определение резонансной частоты на основе индуцированного сигнала, определение сигнала положения и/или ориентации на основе резонансной частоты, определение калибровочной кривой и т.д., выполняемые одним или несколькими блоками или устройствами, также могут быть выполнены любым другим количеством блоков или устройств. Управление отслеживающей системой может быть реализовано в виде средств программного кода компьютерной программы и/или специализированного оборудования.
Компьютерная программа может храниться/распространяться на подходящем носителе, таком как оптический носитель информации или твердотельный носитель, поставляемый вместе с другим оборудованием или как его часть, но может также распространяться в других видах, например, через Интернет или другие проводные или беспроводные системы дальней связи.
Никакие номера позиций в формуле изобретения не следует рассматривать как ограничивающие объем изобретения.
Настоящее изобретение относится к отслеживающей системе и маркерному устройству, причем отслеживающая система используется для отслеживания маркерного устройства, а маркерное устройство выполнено с возможностью прикрепления к медицинскому устройству. Отслеживающая система предназначена для использования во время хирургической операции, при этом маркерное устройство содержит чувствительный блок, содержащий магнитный объект, обеспечивающий постоянный магнитный момент, причем чувствительный блок выполнен с возможностью преобразования внешнего магнитного или электромагнитного поля возбуждения в механическое колебание магнитного объекта, а отслеживающая система содержит генератор поля для генерирования заданного магнитного или электромагнитного поля возбуждения для индуцирования колебаний магнитного объекта чувствительного блока, преобразователь для преобразования магнитного или электромагнитного поля, генерируемого индуцированными механическими колебаниями магнитного объекта, в один или более электрических сигналов отклика, и блок определения положения для определения положения маркерного устройства на основе одного или более электрических сигналов отклика. При этом генератор поля содержит массив генерирования магнитного поля, содержащий множество блоков генерирования, расположенных с заданным пространственным расположением, множество блоков генерирования выполнены с возможностью генерирования неоднородного магнитного поля, причем один или более электрических сигналов отклика указывают на характерное механическое колебание магнитного объекта чувствительного блока, индуцированное неоднородным магнитным поле, сгенерированным множеством блоков генерирования, при этом блок определения положения выполнен с возможностью определения положения маркерного устройства, по меньшей мере частично, на основе одного или более электрических сигналов отклика, указывающих характерное механическое колебание.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ДАВЛЕНИЯ ДЛЯ ВВЕДЕНИЯ В СИСТЕМУ КРОВООБРАЩЕНИЯ ЧЕЛОВЕКА | 2019 |
|
RU2806618C2 |
| СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ МАГНИТНЫХ МАРКЕРОВ ДЛЯ ХИРУРГИЧЕСКОГО НАВЕДЕНИЯ | 2021 |
|
RU2808145C1 |
| ИМПЛАНТИРУЕМЫЙ ДАТЧИК ДАВЛЕНИЯ, СИСТЕМА И СПОСОБ ИЗМЕРЕНИЯ ДАВЛЕНИЯ | 2019 |
|
RU2806338C2 |
| СИСТЕМА ИНДУКТИВНОГО СЧИТЫВАНИЯ ЭЛЕКТРОМАГНИТНЫХ СИГНАЛОВ ОТ ТЕЛА | 2018 |
|
RU2795044C2 |
| СИСТЕМЫ И СПОСОБЫ ОБНАРУЖЕНИЯ МАГНИТНЫХ МАРКЕРОВ ДЛЯ КОНТРОЛЯ ВО ВРЕМЯ ХИРУРГИЧЕСКОГО ВМЕШАТЕЛЬСТВА | 2019 |
|
RU2754312C2 |
| СИСТЕМА БЕСПРОВОДНОЙ ЗАРЯДКИ МОБИЛЬНЫХ УСТРОЙСТВ | 2013 |
|
RU2534020C1 |
| СПОСОБ ВИХРЕТОКОВОГО КОНТРОЛЯ ПРОТЯЖЁННЫХ ЭЛЕКТРОПРОВОДЯЩИХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2651618C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ДАТЧИК И ЕГО КАЛИБРОВКА | 2012 |
|
RU2712981C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК РЧ ПЕРЕДАЮЩЕЙ ЦЕПИ | 2011 |
|
RU2574312C2 |
| ЭЛЕКТРОМАГНИТНЫЙ ДАТЧИК И ЕГО КАЛИБРОВКА | 2012 |
|
RU2593677C2 |
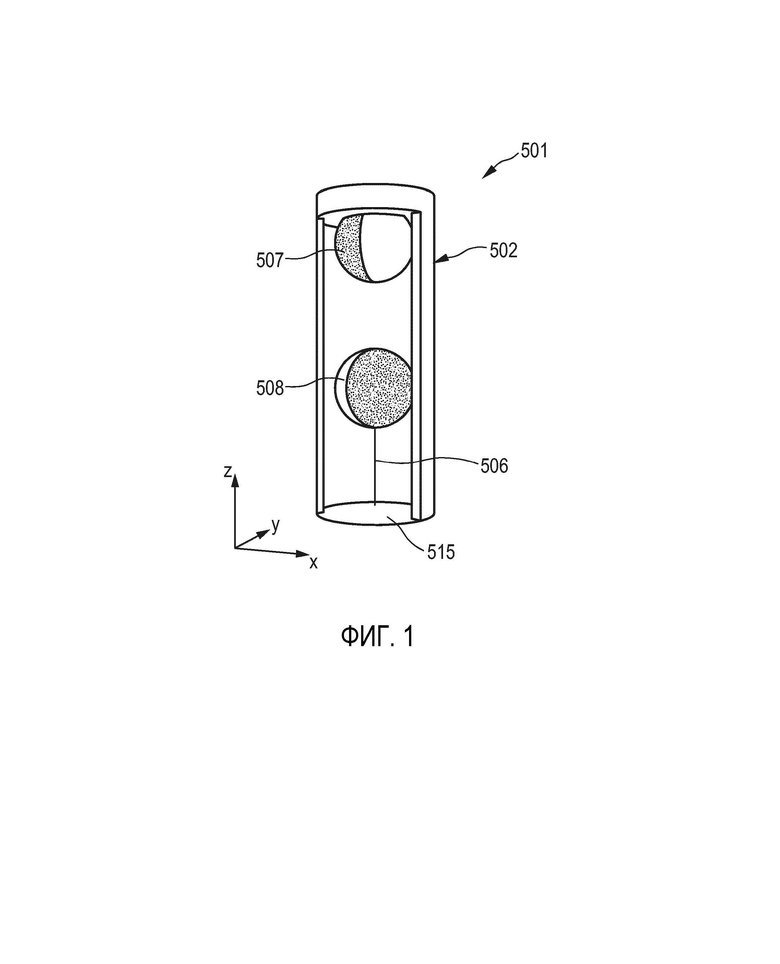
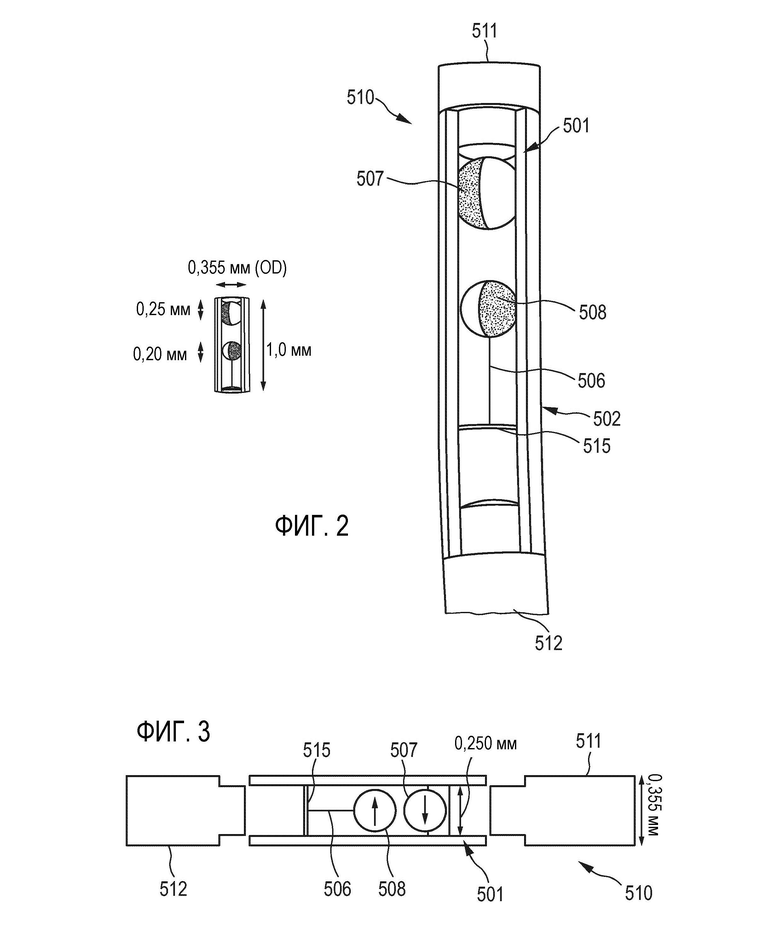
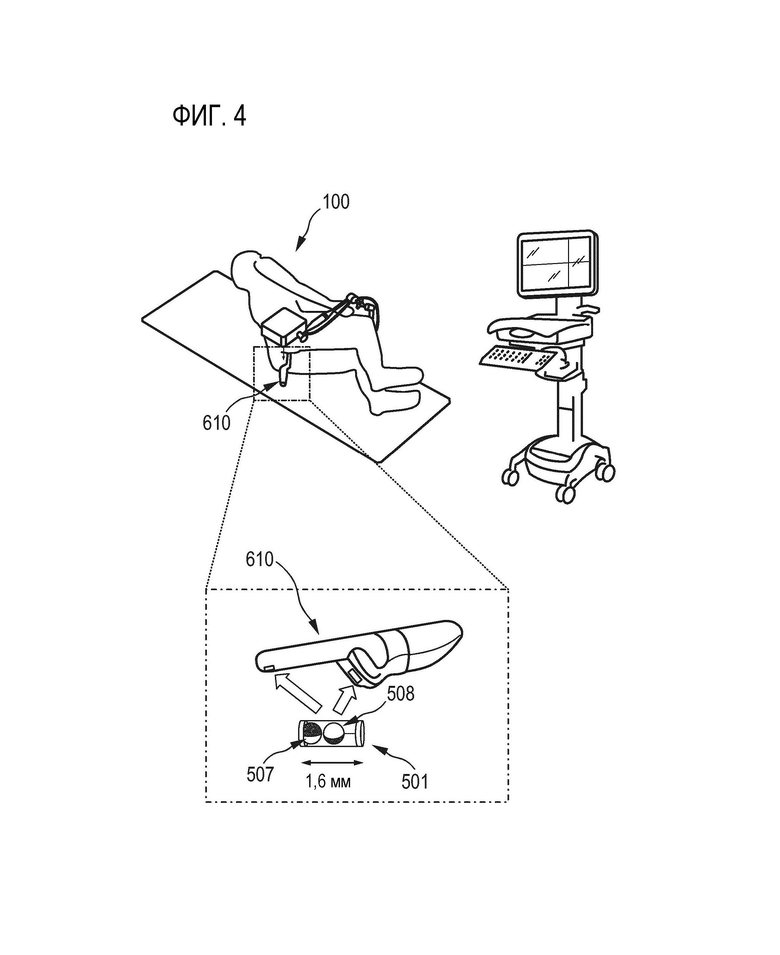
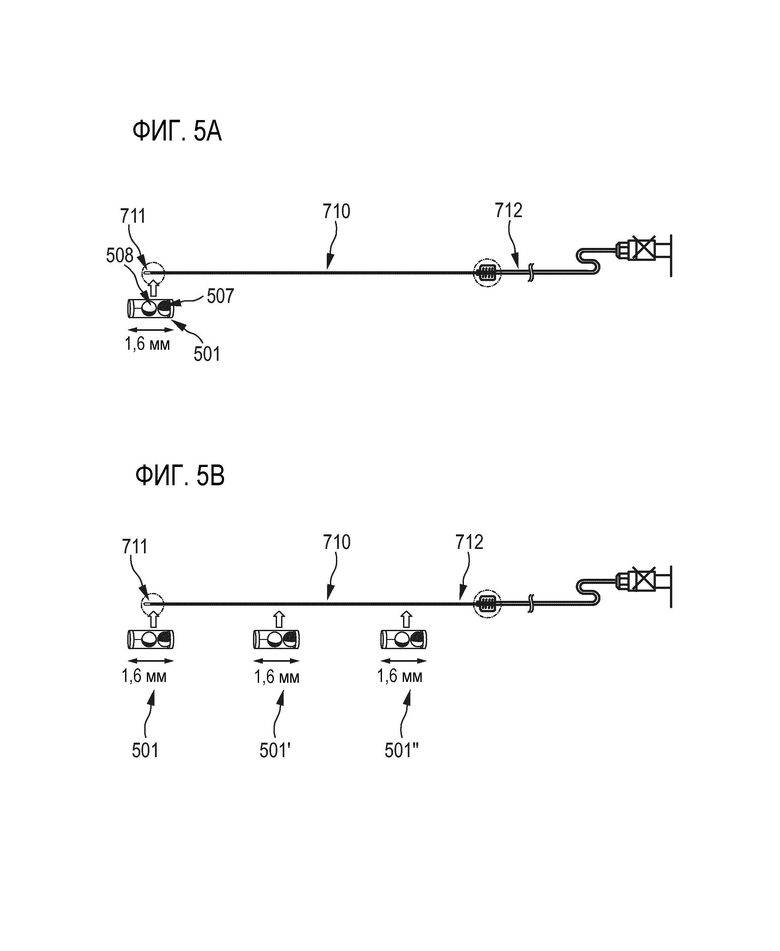
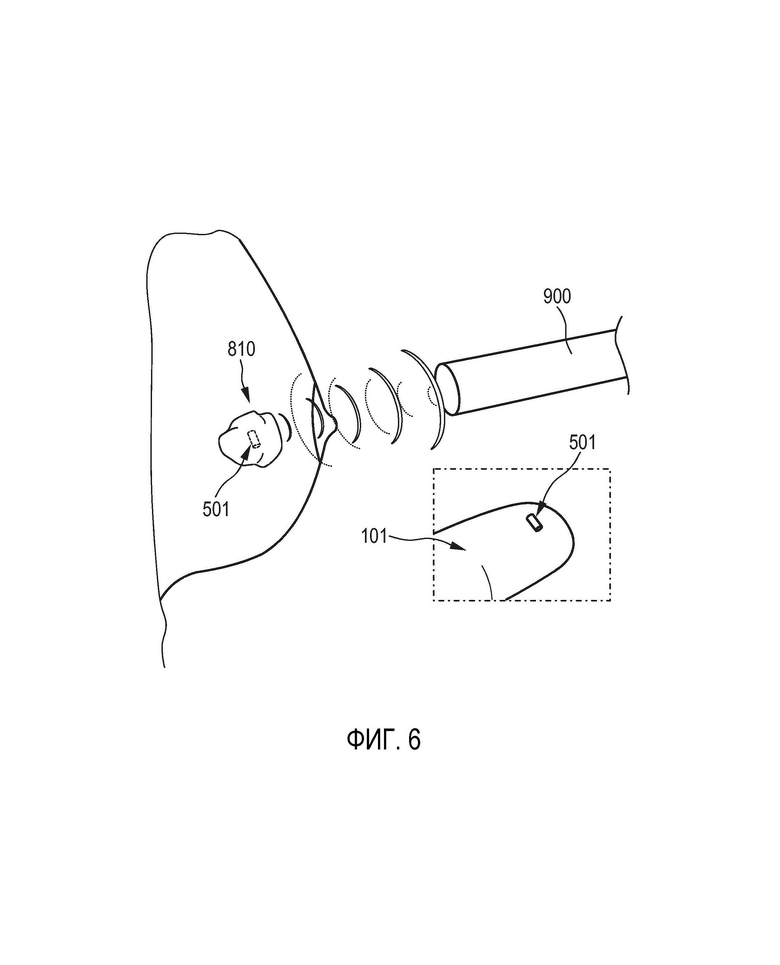
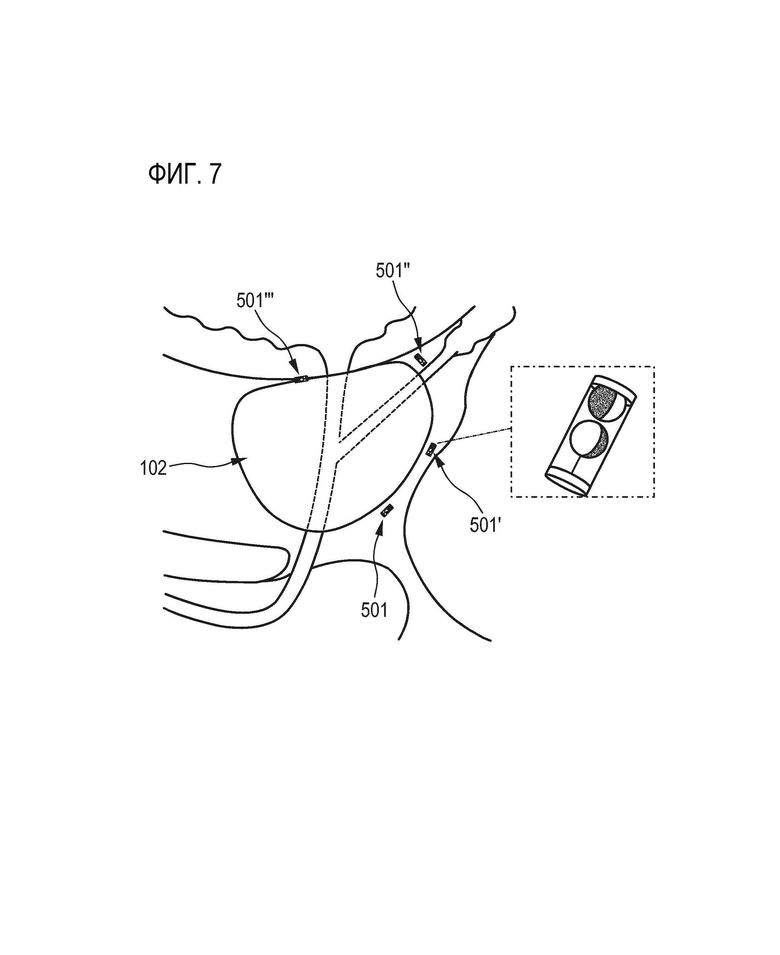
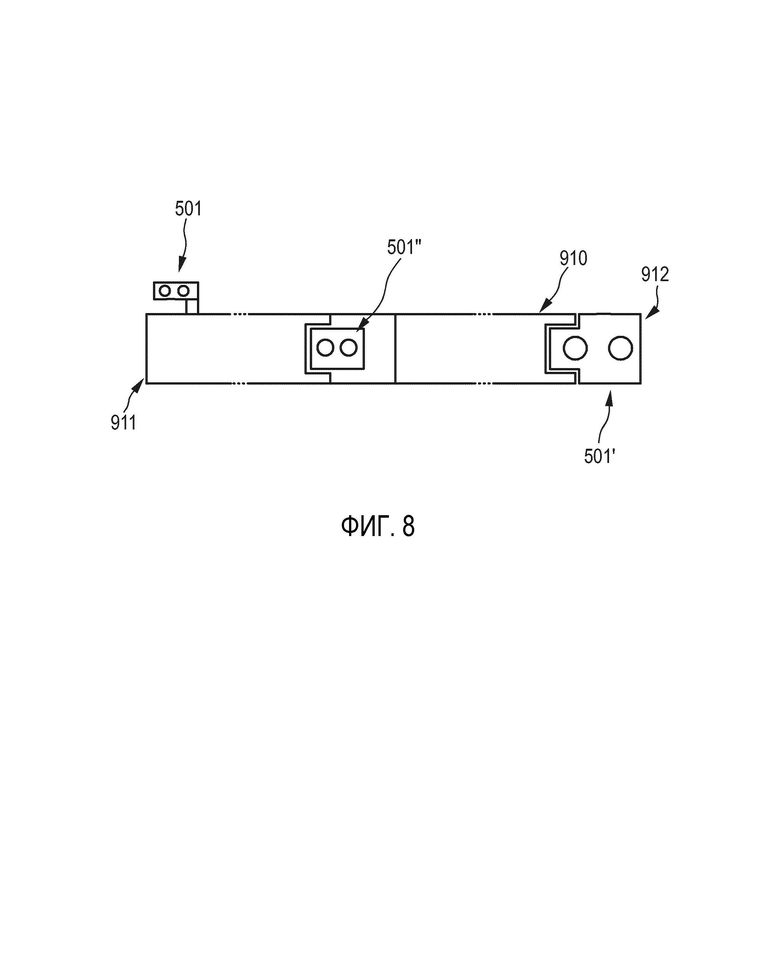
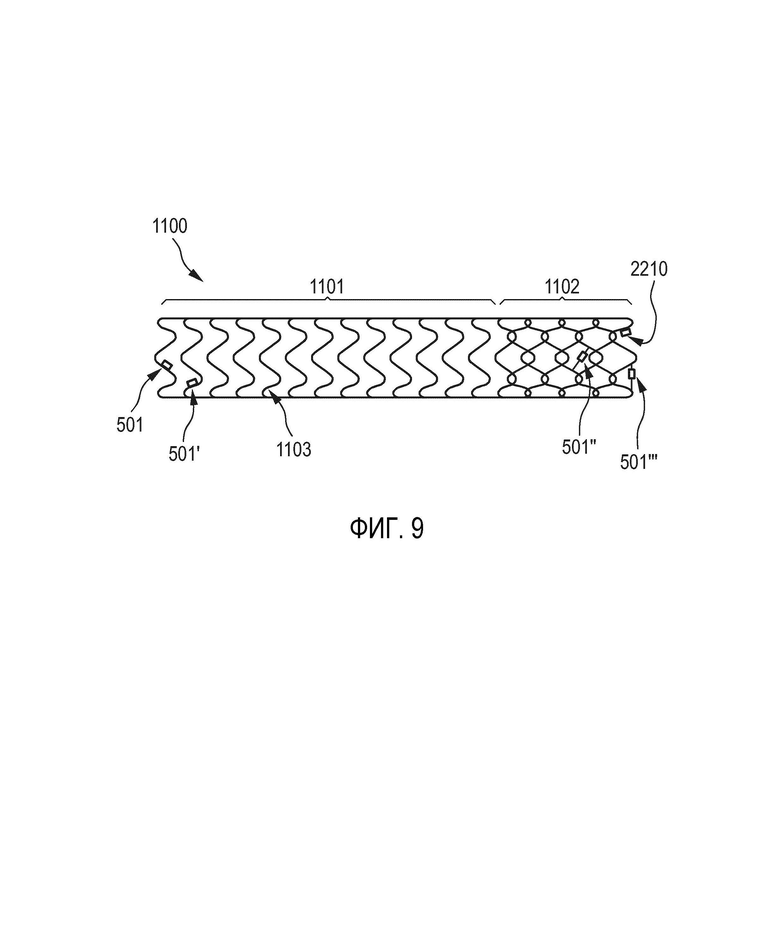
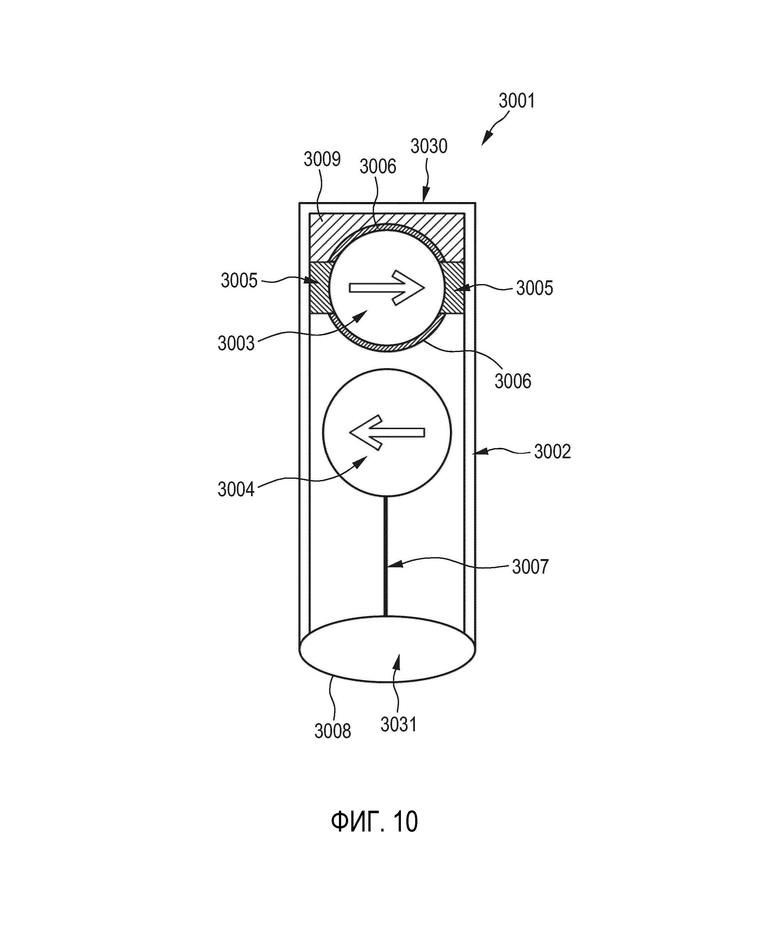
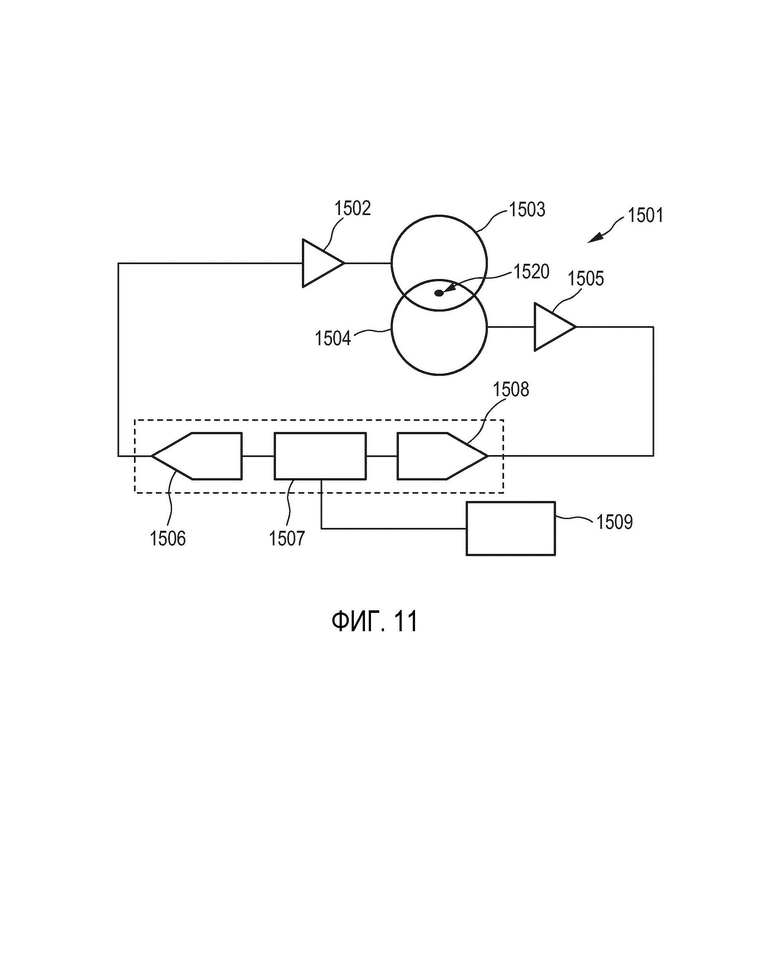
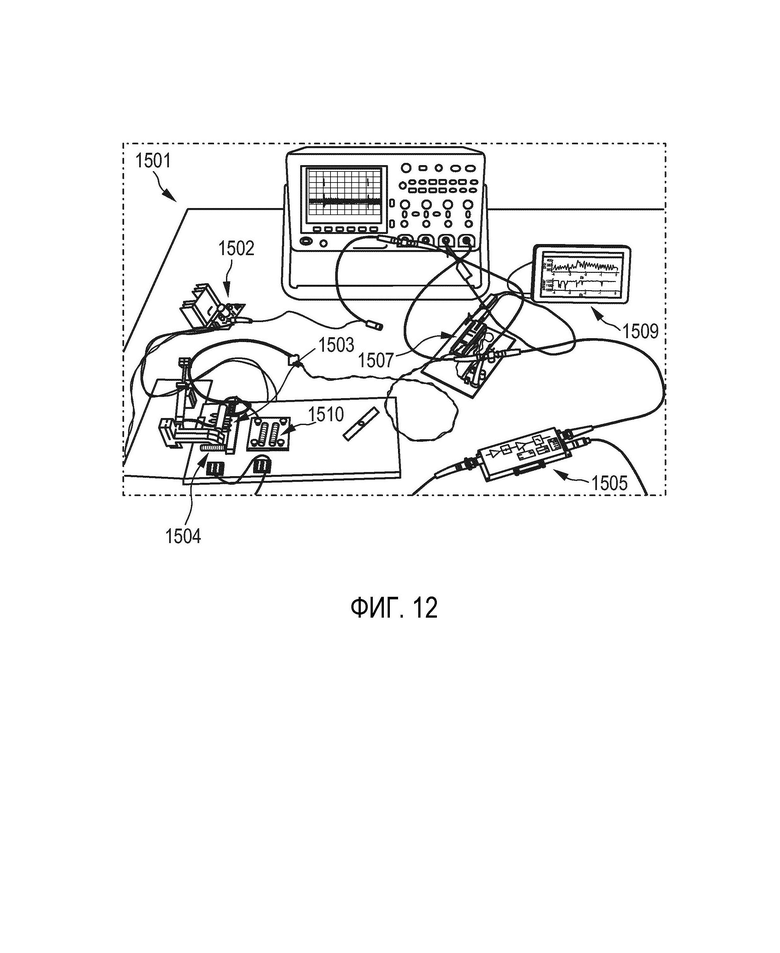
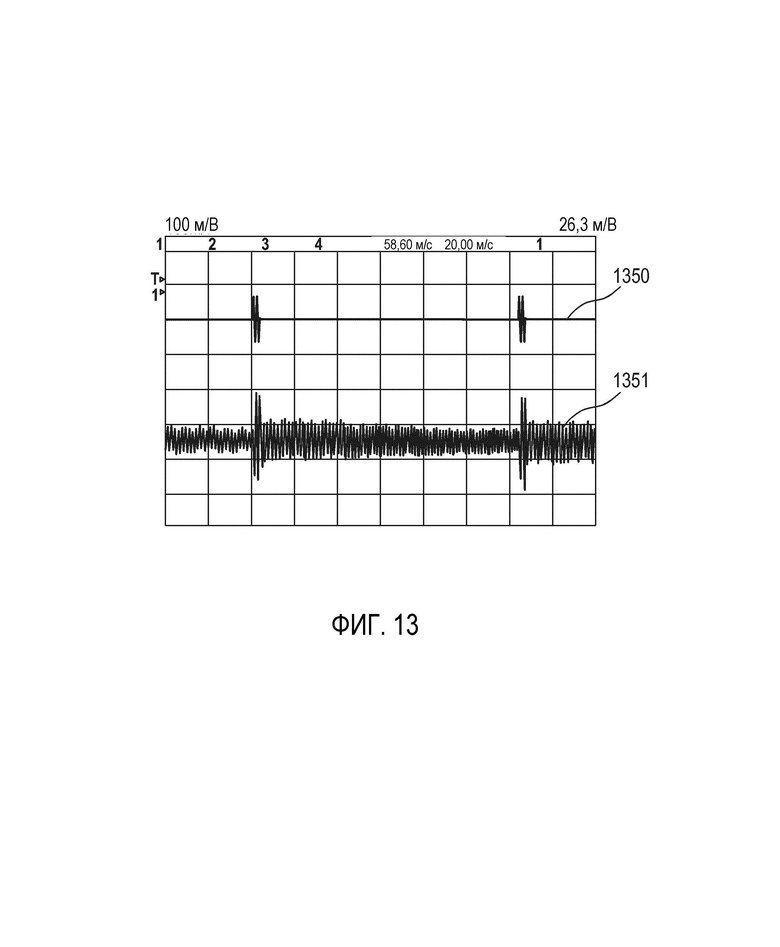
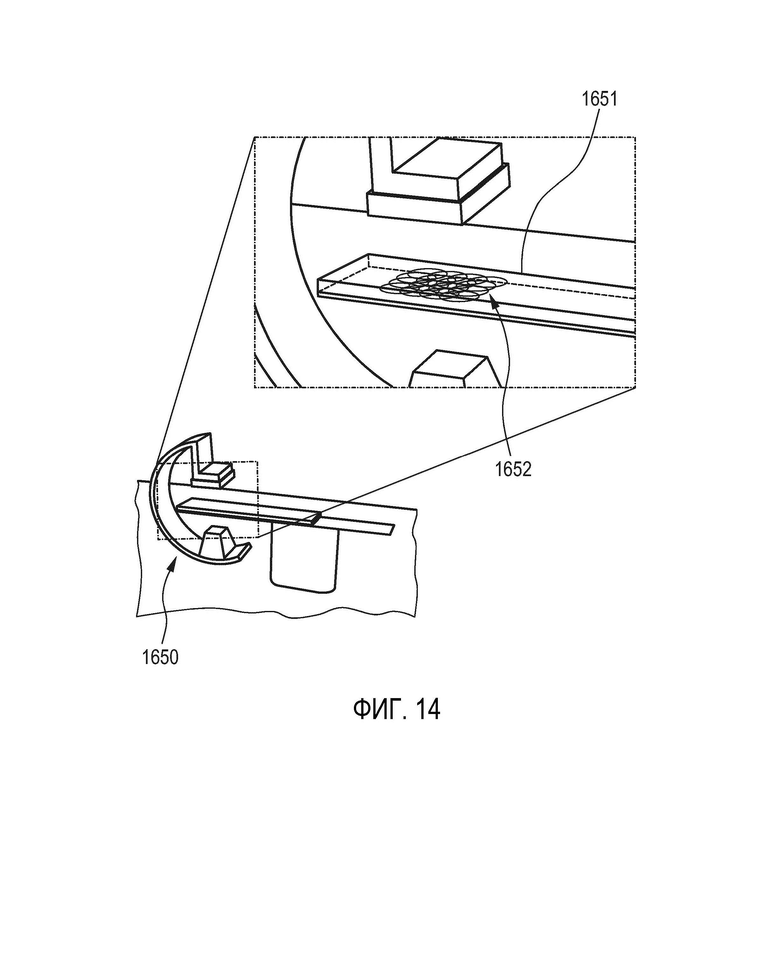
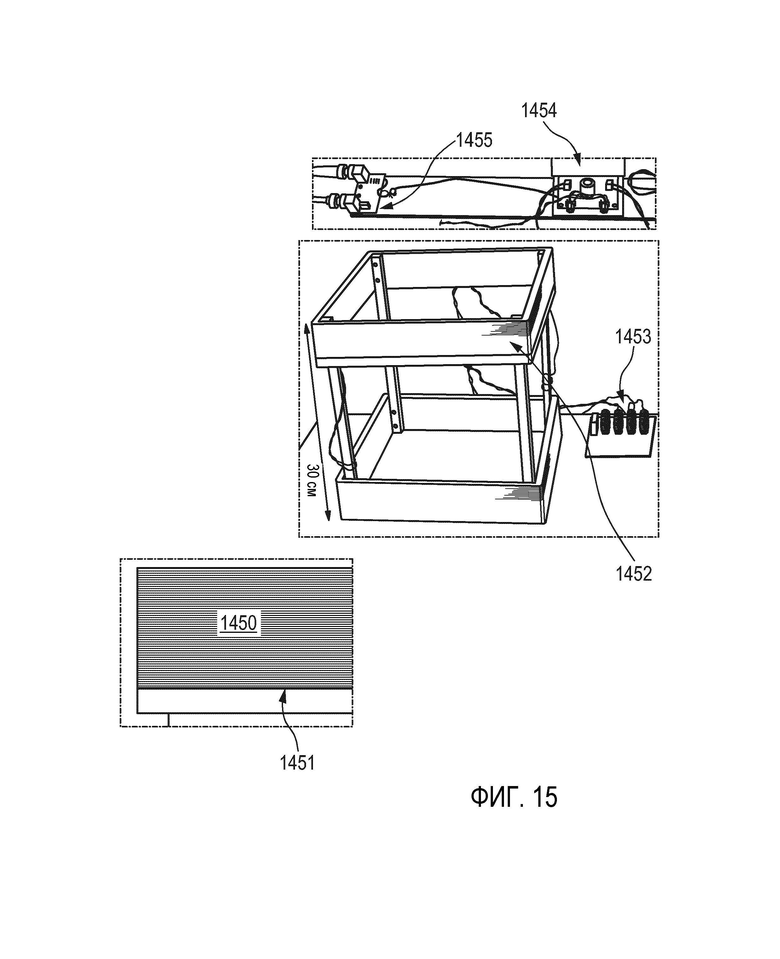

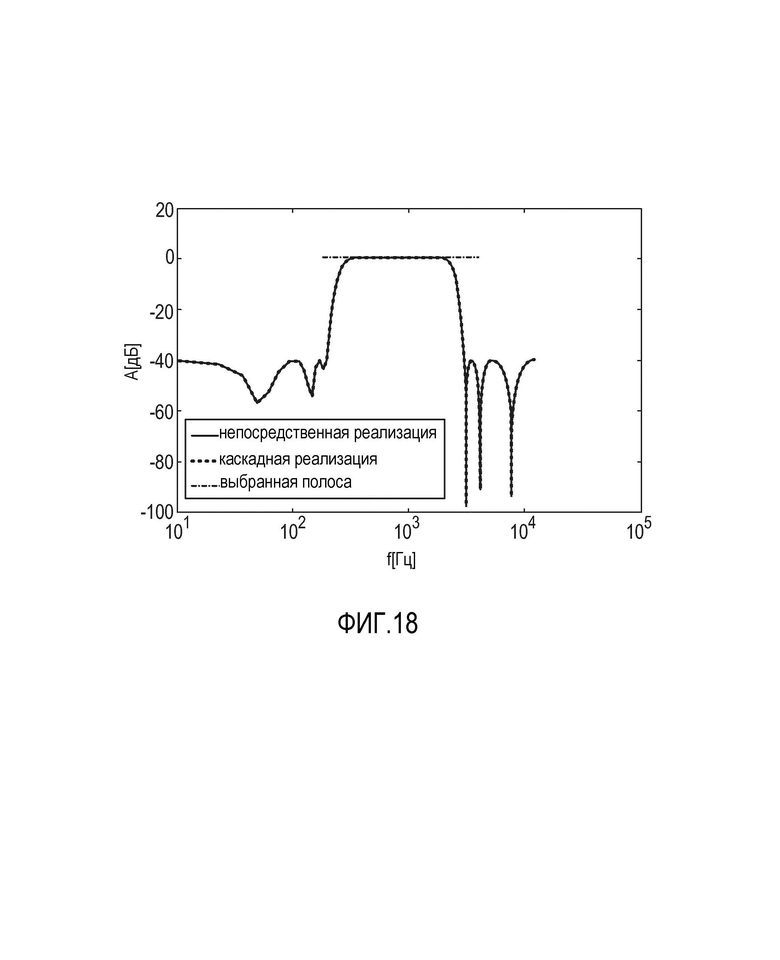
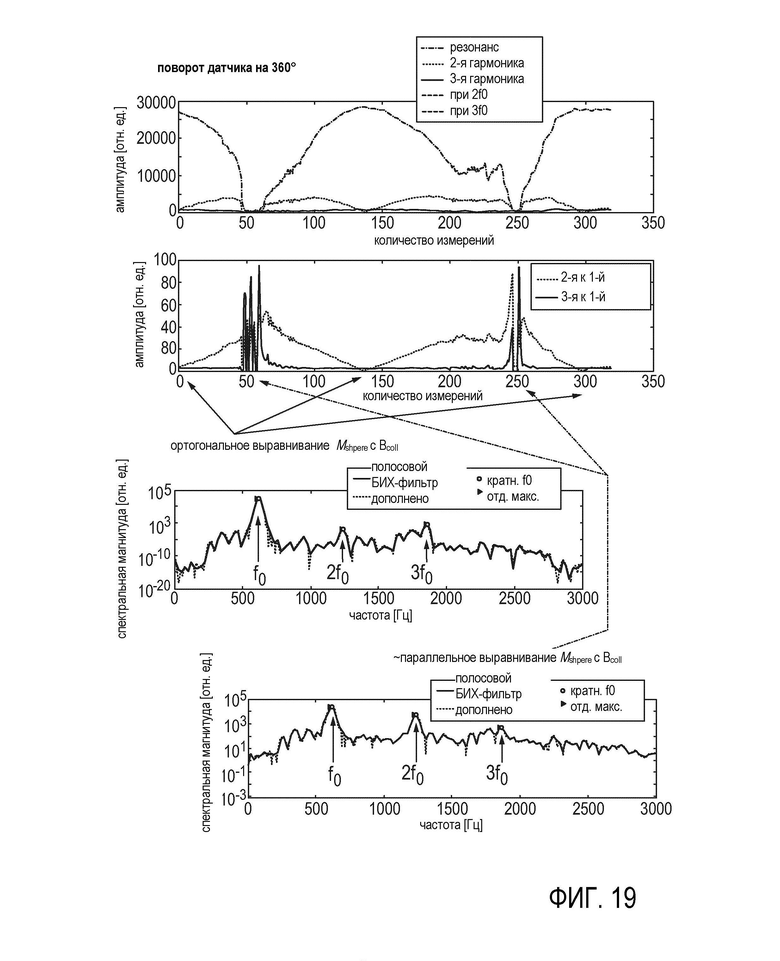
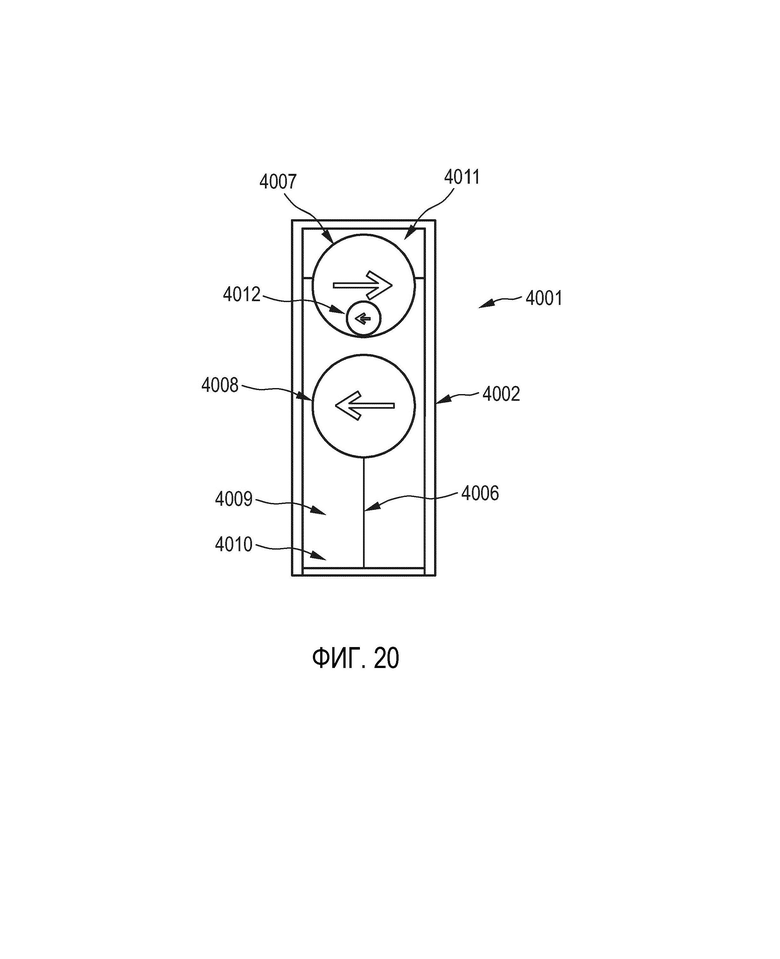
Группа изобретений относится к медицине. Отслеживающая система для отслеживания маркерного устройства, прикрепляемого к медицинскому устройству, при этом маркерное устройство содержит чувствительный блок, содержащий магнитный объект, который может быть возбужден внешним магнитным или электромагнитным полем возбуждения в механическое колебание магнитного объекта, а отслеживающая система содержит генератор поля для генерирования заданного магнитного или электромагнитного поля для индуцирования механических колебаний магнитного объекта, преобразователь для преобразования магнитного или электромагнитного поля, сгенерированного индуцированными механическими колебаниями магнитного объекта, в один или более электрических сигналов отклика, и блок определения положения для определения положения маркерного устройства на основе одного или более электрических сигналов отклика. Применение данной группы изобретений позволит точно указать положение медицинского устройства для использования во время хирургической операции на человеке, в частности на пациенте, на котором выполняют минимально инвазивную процедуру. 7 н. и 16 з.п. ф-лы, 20 ил.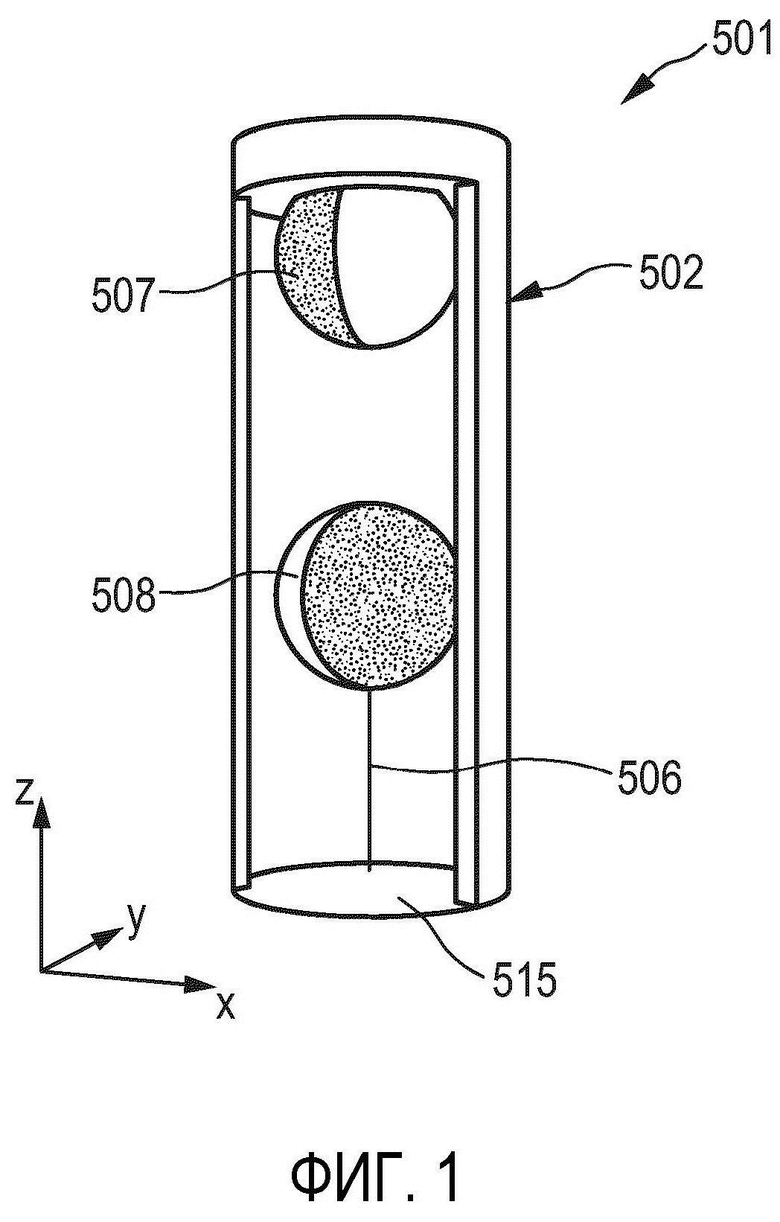
1. Отслеживающая система для использования в хирургии; отслеживающая система содержит:
генератор поля для генерирования заданного магнитного или электромагнитного поля возбуждения для индуцирования механических колебаний магнитного объекта чувствительного блока маркерного устройства, причем магнитный объект обеспечивает постоянный магнитный момент, причем чувствительный блок выполнен с возможностью преобразования заданного магнитного или электромагнитного поля возбуждения в индуцированные механические колебания магнитного объекта, причем индуцированные механические колебания магнитного объекта генерируют магнитное или электромагнитное поле отклика;
преобразователь для преобразования магнитного или электромагнитного поля отклика, генерируемого индуцированными механическими колебаниями магнитного объекта, в один или более электрических сигналов отклика, и
блок определения положения для определения положения маркерного устройства на основе одного или более электрических сигналов отклика.
2. Отслеживающая система по п. 1, в которой блок определения положения выполнен с возможностью определения на основе одного или более электрических сигналов отклика по меньшей мере пяти степеней свободы для маркерного устройства относительно системы координат, обеспечиваемой отслеживающей системой, причем в число этих по меньшей мере пять степеней свободы входят положение и по меньшей мере два угла ориентации маркерного устройства относительно отслеживающей системы.
3. Отслеживающая система по п. 1, которая выполнена с возможностью определения положения маркерных устройств, причем каждое из маркерных устройств содержит соответствующий чувствительный блок;
при этом магнитные объекты соответствующего чувствительного блока выполнены с возможностью колебания с различными резонансными частотами с генерированием разного магнитного или электромагнитного поля отклика, подлежащего преобразованию в соответствующие один или более электрических сигналов отклика, специфичных для соответствующего маркерного устройства,
причем блок определения положения выполнен с возможностью определения положения одного или более из маркерных устройств на основе соответствующего одного или более электрических сигналов отклика.
4. Отслеживающая система по п. 1, которая выполнена с возможностью компенсации зависимости одного или более электрических сигналов от температуры.
5. Отслеживающая система по п. 1, в которой блок определения положения выполнен с возможностью применения алгоритма компенсации для компенсации одного или более из:
- статических фоновых полей и
- динамических фоновых полей.
6. Отслеживающая система по п. 1, в которой блок определения положения выполнен с возможностью применения алгоритма компенсации для компенсации нелинейности, получающейся в результате различных амплитуд колебания механических колебаний.
7. Отслеживающая система по п. 1, в которой генератор поля содержит массив генерирования магнитного поля, содержащий блоки генерирования, расположенные с заданным пространственным расположением,
при этом один или более электрических сигналов отклика указывают характерное механическое колебание магнитного объекта чувствительного блока, индуцированное каждым из блоков генерирования,
причем блок определения положения выполнен с возможностью определения положения маркерного устройства, по меньшей мере частично, на основе одного или более электрических сигналов отклика, указывающих характерное механическое колебание.
8. Отслеживающая система по п. 7, в которой блок определения положения выполнен с возможностью определения, из одного или более электрических сигналов отклика, амплитуды характерных механических колебаний магнитного объекта для каждого из блоков генерирования.
9. Отслеживающая система по п. 1, дополнительно содержащая блок управления, и
в которой генератор поля содержит массив генерирования магнитного поля, содержащий блоки генерирования, расположенные с заданным пространственным расположением;
причем каждый из блоков генерирования выполнен с возможностью управления им посредством блока управления независимо от остальных блоков генерирования из указанных блоков генерирования, блок управления выполнен с возможностью управления по меньшей мере некоторыми из блоков генерирования так, что по меньшей мере один пространственный компонент поля возбуждения магнитного или электромагнитного поля возбуждения выполнен с возможностью изменения посредством упомянутого управления;
причем блок определения положения выполнен с возможностью определения положения маркерного устройства, по меньшей мере частично, на основе одного или более электрических сигналов отклика, указывающих на изменение по меньшей мере одного пространственного компонента поля возбуждения.
10. Отслеживающая система по п. 1, в которой генератор поля выполнен с возможностью последовательного генерирования набора различных дополнительных магнитных или электромагнитных полей возбуждения, меняющихся в пространстве и/или времени;
причем блок определения положения выполнен с возможностью определения положения маркерного устройства, по меньшей мере частично, на основе одного или более электрических сигналов отклика, преобразованных преобразователем на основе магнитного или электромагнитного поля, генерируемого индуцированными механическими колебаниями магнитного объекта в ответ на каждое поле из набора различных дополнительных магнитных или электромагнитных полей возбуждения.
11. Маркерное устройство для указания положения медицинского устройства, содержащее:
- корпус и
- чувствительный блок, содержащий магнитный объект, обеспечивающий постоянный магнитный момент, причем чувствительный блок выполнен с возможностью преобразования внешнего магнитного или электромагнитного поля возбуждения в индуцированные механические колебания магнитного объекта, причем индуцированные механические колебания не зависят от внешнего давления, которому подвергается чувствительный блок, и при этом индуцированные механические колебания генерируют магнитное или электромагнитное поле отклика.
12. Маркерное устройство по п. 11, в котором корпус является жестким корпусом.
13. Маркерное устройство по п. 11, в котором маркерное устройство имеет удлиненную форму, причем максимальный размер меньше или равен 5 мм, а минимальный размер меньше или равен 1 мм.
14. Маркерное устройство по п. 11, в котором магнитный объект расположен внутри корпуса так, чтобы обеспечивалась возможность поворота из равновесной ориентации, если на магнитный объект действует внешнее магнитное или электромагнитное поле возбуждения; и при этом чувствительный блок также содержит:
блок восстанавливающего крутящего момента, чтобы обеспечивать восстановление крутящего момента для возврата магнитного объекта в равновесную ориентацию, если внешнее магнитное или электромагнитное поле возбуждения повернуло магнитный объект из равновесной ориентации, чтобы обеспечить возможность механических колебаний магнитного объекта с резонансной частотой.
15. Медицинское устройство для использования во время хирургической операции, содержащее:
инструмент для использования медицинским персоналом и
маркерное устройство, прикрепленное к медицинскому инструменту, причем маркерное устройство включает:
корпус и
чувствительный блок, содержащий магнитный объект, обеспечивающий постоянный магнитный момент, причем чувствительный блок выполнен с возможностью преобразования внешнего магнитного или электромагнитного поля возбуждения в индуцированные механические колебания магнитного объекта, причем индуцированные механические колебания не зависят от внешнего давления, которому подвергается чувствительный блок, и при этом индуцированные механические колебания генерируют магнитное или электромагнитное поле отклика.
16. Медицинское устройство по п. 15, которое содержит кончик, выполненный с возможностью прикрепления к нему маркерного устройства.
17. Медицинское устройство по п. 15, которое содержит одно или более из инвазивного устройства или имплантата, в частности электрического имплантата и/или ортопедического имплантата.
18. Медицинское устройство по п. 15, которое содержит одно или более из: хирургического прибора, формирующего изображение зонда, эндоскопа, бронхоскопа или таблетки для приема внутрь.
19. Медицинское устройство по п. 15, которое содержит одно или более из катетера, проволоки, в частности проволочного направителя, стента, одной или более спиралей для эмболизации аневризмы, одного или более фильтров для полой вены, сердечного клапана, шунта, иглы, проволоки, трубки, стилета или радиоактивной гранулы.
20. Инструмент для инвазивных процедур, содержащий маркерное устройство, прикрепленное к указанному инструменту, причем маркерное устройство включает корпус и чувствительный блок, содержащий магнитный объект, обеспечивающий постоянный магнитный момент, причем чувствительный блок выполнен с возможностью преобразования внешнего магнитного или электромагнитного поля возбуждения в индуцированные механические колебания магнитного объекта, причем индуцированные механические колебания не зависят от внешнего давления, которому подвергается чувствительный блок, и при этом индуцированные механические колебания генерируют магнитное или электромагнитное поле отклика, причем инструмент имеет продолговатую форму и выполнен с возможностью иметь маркерные устройства по п. 11, причем маркерные устройства расположены вдоль продольной оси упомянутого инструмента.
21. Способ отслеживания для отслеживания маркерного устройства для указания положения медицинского устройства, при этом маркерное устройство включает:
корпус и
чувствительный блок, содержащий магнитный объект, обеспечивающий постоянный магнитный момент, причем чувствительный блок выполнен с возможностью преобразования внешнего магнитного или электромагнитного поля возбуждения в индуцированные механические колебания магнитного объекта, причем индуцированные механические колебания не зависят от внешнего давления, которому подвергается чувствительный блок, и при этом индуцированные механические колебания генерируют магнитное или электромагнитное поле отклика,
и маркерное устройство выполнено с возможностью прикрепления к медицинскому устройству с использованием отслеживающей системы по п. 1, причем отслеживающая система выполнена с возможностью использования во время хирургической операции;
при этом способ включает:
генерирование магнитного или электромагнитного поля возбуждения для индуцирования индуцированных механических колебаний магнитного объекта чувствительного блока,
преобразование магнитного или электромагнитного поля отклика, генерируемого индуцированными механическими колебаниями магнитного объекта чувствительного блока, в один или более электрических сигналов отклика, и
определение положения маркерного устройства на основе одного или более электрических сигналов отклика.
22. Некратковременный компьютерочитаемый носитель, выполненный с возможностью хранить компьютерную программу, содержащую инструкции для исполнения машиной для обуславливания отслеживания отслеживающей системой маркерного устройства, прикрепленного к медицинскому устройству, причем маркерное устройство включает: чувствительный блок, содержащий магнитный объект, обеспечивающий постоянный магнитный момент, причем чувствительный блок выполнен с возможностью преобразования внешнего магнитного или электромагнитного поля возбуждения в индуцированные механические колебания магнитного объекта, и при этом индуцированные механические колебания генерируют магнитное или электромагнитное поле отклика; и при этом отслеживающая система включает: генератор поля для генерирования заданного магнитного или электромагнитного поля возбуждения для индуцирования индуцированных механических колебаний магнитного объекта чувствительного блока, преобразователь для преобразования магнитного или электромагнитного поля отклика, генерируемого индуцированными механическими колебаниями магнитного объекта, в один или более электрических сигналов отклика, и блок определения положения для определения положения маркерного устройства на основе одного или более электрических сигналов отклика, для выполнения способа отслеживания по п. 21 при выполнении компьютерной программы на компьютере, управляющем отслеживающей системой.
23. Медицинское устройство, включающее инструмент для использования медицинским персоналом и маркерное устройство, прикрепленное к указанному инструменту, причем маркерное устройство включает корпус и чувствительный блок, содержащий магнитный объект, обеспечивающий постоянный магнитный момент, причем чувствительный блок выполнен с возможностью преобразования внешнего магнитного или электромагнитного поля возбуждения в индуцированные механические колебания магнитного объекта, причем индуцированные механические колебания не зависят от внешнего давления, которому подвергается чувствительный блок, причем медицинское устройство имеет продолговатую форму и выполнено с возможностью иметь маркерные устройства по п. 11, причем маркерные устройства расположены вдоль продольной оси упомянутого медицинского устройства.
| US 20160261233 A1, 08.09.2016 | |||
| WO 2003053533 A2, 03.07.2003 | |||
| US 20150126829 A1, 07.05.2015 | |||
| US 20070236213 A1, 11.10.2007. |
