Изобретение относится к подводным автономным технологическим машинам, предназначенным для освоения мирового океана, в частности для обслуживания подводных полигонов добычи полезных ископаемых, таких например, как залежи железо-маргонцевых кенкреций (ЖМК) или других полезных ископаемых на глубинах 2…4 тыс. м.
Глубоководная добыча полезных ископаемых сопряжена с рядом трудностей и осуществляется по технологиям, требующим применения оригинальных подводных аппаратов (см. В.В. Беляков, В.Е. Колотилин, В.С. Макаров и др. Проектирование наземных транспортно-технологических машин и комплексов (под ред. В.В, Белякова) – Москва: КНОРУС, 2021, стр. 365-366).
Условия работы подводных аппаратов могут изменяться в широких пределах в связи с особенностями формирования донного рельефа в зависимости от глубины бассейна (см., например, Континентальные фации. https://studopedia.ru/11_229851-kontinentalnie-fatsii.html)
Известно «Универсальное транспортное средство» (патент на полезную модель 180701, опубл. 21.06.2018 г.), для движения в любых средах от грунтовой поверхности до воды, оснащенное роторно-винтовым движителем, размещенным на платформе, на которую в свою очередь опирается через опорные катки корпус транспортного средства, так что роторно-винтовой движитель может поворачиваться относительно продольной оси транспортного средства на 180о, что обеспечивает повышение маневренности транспортного средства. Подвижное соединение платформы роторно-винтового движителя с корпусом транспортного средства, обеспечивающее изменение (регулирование) положения корпуса машины относительно движителя (его продольной оси), позволяет использовать движитель в режиме движения лагом (когда роторы обоих бортов вращаются в одну сторону) и роторы работают как катки, а направление движения корпуса машины перпендикулярно продольной оси роторов. Данное устройство обладает рядом существенных недостатков. Во-первых, оно не дает возможности движения по сильно пересеченному донному рельефу, т.к. роторы движителя представляют собой жесткие балки, оси которых закреплены в неподвижных опорах платформы. Такой движитель не способен адаптироваться к сильно пересеченной поверхности движения, то есть не обеспечивает профильную проходимость подводного аппарата. Во-вторых, вследствие жесткого закрепления опор роторов, при движении машины по косогору корпус машины испытывает крен, что ограничивает применение транспортного средства совместно с рабочими органами. И в-третьих, движение продольной оси роторов по криволинейной траектории при маневрировании машины осуществляется т.н. бортовым поворотом, т.е. за счет разности тяговых усилий движителей обоих бортов. Такой способ поворота вызывает увод машины с траектории движения из-за возрастающего сопротивления движению и повороту, повышенное буксование на слабых грунтах, что также затрудняет использование транспортного средства как базы технологической машины.
Известно устройство «Универсальный траншейный проходчик» (патент на полезную модель РФ 187634 опубл. 14.03.2019), относящийся к классу донных аппаратов и оснащенный движителями высокой опорной проходимости и специальным технологическим оборудованием, предназначенным для механизации тяжелых механических работ на дне водоемов. Данное устройство наиболее близко соответствует предлагаемому техническому решению, однако обладает существенным недостатком, заключающимся в том, что его роторно-винтовой движитель, обеспечивая движение по слабонесущим опорным основаниям, не способен обеспечить преодоление неровностей, например препятствий типа эскарп или контрэскарп, соизмеримых по высоте с геометрическими размерами машины.
Целью настоящего технического предложения является создание подводного аппарата особо высокой профильной проходимости (подвижности) для обслуживание полигона добычи полезных ископаемых, например по сбору и транспортированию ЖМК к устройствам для подъема на надводную базу, обеспечение возможности перемещаться непосредственно по донной поверхности за счет контактирующего с ней движителя.
Технический результат достигается тем, что в многоцелевом подводном аппарате, включающем в себя корпус и роторно-винтовые движители, корпус состоит из N звеньев, причём N≥3, соединённых между собой манипуляторными сцепными устройствами с двумя степенями свободы так, чтобы преодолевать единичные препятствия, соизмеримые с габаритными размерами звеньев аппарата, а манипуляторное сцепное устройство, имеющее две степени свободы и обеспечивающее изменение углов между продольными осями звеньев как в горизонтальной, так и в вертикальной плоскостях, содержит жесткую сцепку, представляющую собой неизменяемую пространственную конструкцию треугольного профиля с горизонтальными и вертикальными шарнирами присоединения к звеньям подводного аппарата.
В качестве движителя выбран роторно-винтовой движитель, обладающий амфибийными качествами, т.е. высокими тяговыми свойствами на суще, переходных средах и на воде, установленный на корпусе так, что обеспечивается приспосабливаемость роторно-винтового движителя к поверхности пути, максимальный контакта роторов с грунтом, минимизация крена корпуса при движении по косогору, сохранение устойчивого движения корпуса по заданной криволинейной траектории и полная реализация тяговых возможностей по сцеплению движителя с грунтом.
Предлагаемый многоцелевой подводный аппарат содержит N звеньев (где N≥3), каждое звено оснащено роторно-винтовым движителем и присоединено к последующему звену с помощью манипуляторного сцепного устройства с двумя степенями свободы, обеспечивающего надежный контакт движителей каждого звена (модуля) с поверхностью пути, а также силовое (принудительное) перемещение звена в вертикальном и горизонтальном направлениях так, что подводный аппарат может перемещаться по криволинейной траектории в горизонтальной и вертикальной плоскости, причем в последнем случае передний (направляющий) модуль может занять положение выше (или ниже) заднего (замыкающего) на расстояние, соизмеримое с геометрической размерами модуля, позволяя тем самым преодолевать подводному аппарату препятствие (эскарп или контрэскарп), соизмеримое с геометрическими размерами машины. Подобное силовое перемещение звеньев подводного аппарата с помощью манипуляторного сцепного устройства может осуществляться и в горизонтальной плоскости, а также на косогорах, что в сочетании с повышенной приспособляемостью к поверхности пути роторно-винтовых движителей звеньев обеспечивает многоцелевому подводному аппарату особо высокую профильную проходимость при сохранении надежного контакта движителей с грунтом.
С целью обеспечения особо высокой профильной проходимости (подвижности), например преодоление складок рельефа местности и единичных препятствий значительной высоты и длины (соизмеримых с геометрическими размерами машины), многоцелевой подводный аппарат состоит из N звеньев (модулей), где N≥3, из которых каждый последующий модуль присоединен к предыдущему с помощью манипуляторного сцепного устройства с двумя степенями свободы, обеспечивающего надежный контакт движителей каждого модуля с поверхностью пути, а также силовое (принудительное) перемещение звена в вертикальном и горизонтальном направлениях.
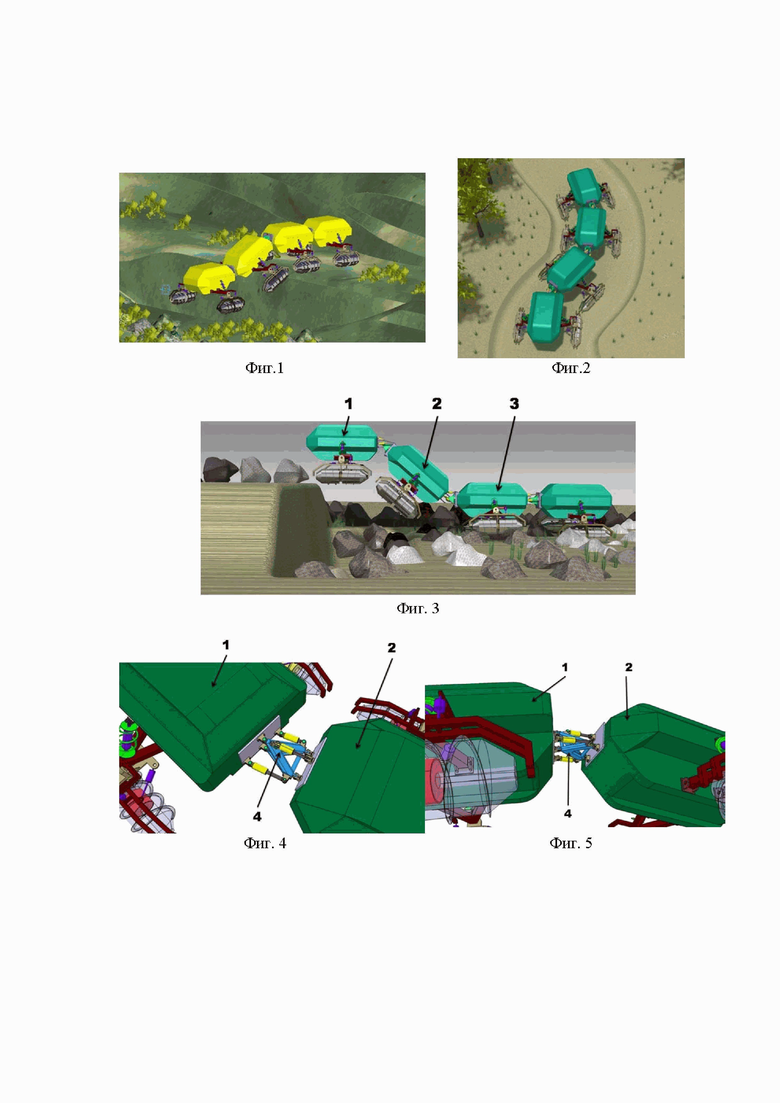
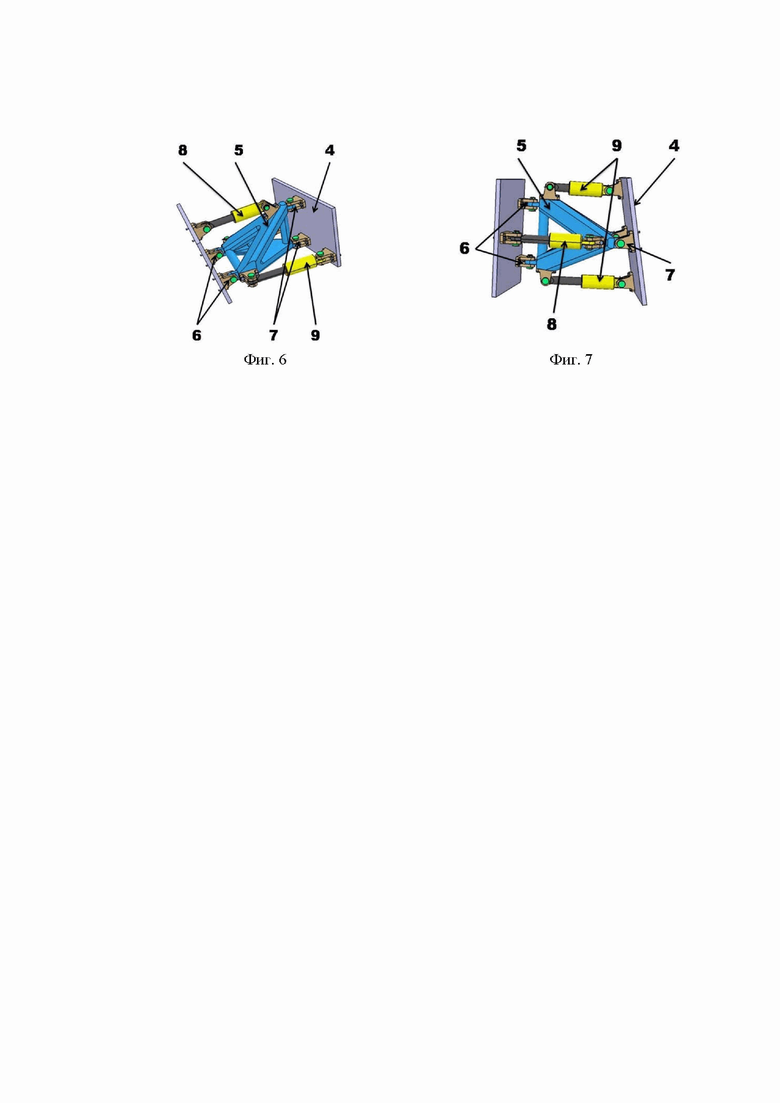
Устройство многоцелевого подводного аппарата поясняется чертежами, где на фиг. 1 представлен общий вид многоцелевого подводного аппарата в процессе движения по пересеченному рельефу донной поверхности водоема, а на фиг. 2 – движение по криволинейной траектории в горизонтальной плоскости. Фиг. 3 иллюстрирует преодоление препятствия типа эскарп. При этом манипуляторные сцепные устройства между звеньями 1-2 и между звеньями 2-3 обеспечивают подъем головного 1-го звена на высоту препятствия, соизмеримую с геометрическими размерами звена по высоте.
Манипуляторные сцепные устройства, установленные между всеми звеньями многоцелевого подводного аппарата, имеют одинаковую конструкцию и принцип действия.
Манипуляторное сцепное устройство 4 с двумя степенями свободы между звеньями 1 и 2 обеспечивает изменение угла между продольными осями звеньев 1 и 2 как в горизонтальной, фиг. 4, так и в вертикальной, фиг. 5, плоскостях. Как показано на фиг. 6 (вид сбоку) и фиг. 7 (вид сверху), манипуляторное сцепное устройство 4 состоит из жесткой сцепки 5, представляющей собой неизменяемую пространственную конструкцию треугольного профиля с горизонтальными 6 и вертикальными 7 шарнирами присоединения к звеньям подводного аппарата. При этом горизонтальные шарниры 6 образуют ось поворота звеньев 1 и 2 в вертикальной плоскости, а вертикальные шарниры 7 образуют ось поворота звеньев 1 и 2 в горизонтальной плоскости. Гидроцилиндр 8, соединенный с звеном 1 и с жесткой сцепкой 5 обеспечивают поворот звеньев относительно шарниров 6, т. е. управление направлением движения в вертикальной плоскости, а гидроцилиндры 9, соединенные соответственно с звеном 2 и жесткой сцепкой 5, обеспечивают поворот звеньев за счет шарниров 7, т. е. управление направлением движения в горизонтальной плоскости.
Преодоление единичного препятствия (типа эскарп) многоцелевым подводным аппаратом осуществляется следующим образом. При подходе многоцелевого подводного аппарата к препятствию и оценке возможности его преодоления включаются одновременно в работу, как показано на фиг. 3, два манипуляторных сцепных устройства, аппарат приближается к препятствию, удерживая поднятые звенья под заданным углом к горизонту с помощью гидроцилиндров 8. Положение звена 1 (головного) относительно преодолеваемого уступа регулируется манипуляторным сцепным устройством между звеньями 1 и 2. Звено 1 встает на уступ и создает с помощью своих роторно-винтовых движителей дополнительное тяговое усилие для подъема звеньев аппарата на препятствие. При этом положение последующих звеньев в вертикальной плоскости регулируется соответствующими манипуляторными сцепными устройствами.
Таким образом, поскольку манипуляторные сцепные устройства могут фиксировать звенья в заданном положении, многоцелевой подводный аппарат приобретает способность преодолевать единичные препятствия типа канава шириной более габаритной длины звена.
| название | год | авторы | номер документа |
|---|---|---|---|
| Амфибийная роторно-винтовая платформа | 2023 |
|
RU2803514C1 |
| Подводный робототехнический комплекс | 2015 |
|
RU2609618C1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2446983C2 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2563074C1 |
| МОДУЛЬ СИЛОВОГО УЗЛА СЦЕПНОГО УСТРОЙСТВА И СЦЕПНОЕ УСТРОЙСТВО С ТАКИМ МОДУЛЕМ (ВАРИАНТЫ) | 2012 |
|
RU2506173C1 |
| Универсальное транспортное средство на роторно-винтовом движителе | 2018 |
|
RU2700240C1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| СОЧЛЕНЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО С КОЛЕСНО-ШАГАЮЩИМ ДВИЖИТЕЛЕМ | 2018 |
|
RU2684956C1 |
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА | 2004 |
|
RU2279628C2 |
| Шнековый движитель | 2019 |
|
RU2720383C1 |
Изобретение относится к подводным автономным технологическим машинам, предназначенным для освоения мирового океана. Многоцелевой подводный аппарат включает в себя корпус и роторно-винтовые движители. Корпус состоит из N звеньев, причём N≥3 соединены между собой манипуляторными сцепными устройствами с двумя степенями свободы с возможностью преодоления единичных препятствий, соизмеримых с габаритными размерами звеньев аппарата. Манипуляторное сцепное устройство имеет две степени свободы и обеспечивает изменение углов между продольными осями звеньев как в горизонтальной, так и в вертикальной плоскостях и содержит жесткую сцепку, представляющую собой неизменяемую пространственную конструкцию треугольного профиля с горизонтальными и вертикальными шарнирами присоединения к звеньям подводного аппарата. Достигается высокая профильная проходимость для обслуживания полигона добычи полезных ископаемых. 7 ил.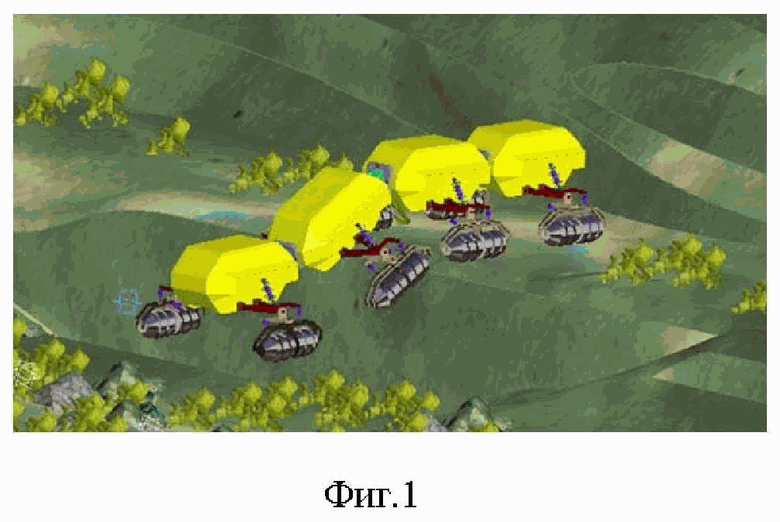
Многоцелевой подводный аппарат, включающий в себя корпус и роторно-винтовые движители, отличающийся тем, что корпус состоит из N звеньев, причём N≥3, соединённых между собой манипуляторными сцепными устройствами с двумя степенями свободы так, чтобы преодолевать единичные препятствия, соизмеримые с габаритными размерами звеньев аппарата, а манипуляторное сцепное устройство, имеющее две степени свободы и обеспечивающее изменение углов между продольными осями звеньев как в горизонтальной, так и в вертикальной плоскостях, содержит жесткую сцепку, представляющую собой неизменяемую пространственную конструкцию треугольного профиля с горизонтальными и вертикальными шарнирами присоединения к звеньям подводного аппарата.
| ЩЕЛЕВАЯ ГОРИЗОНТАЛЬНАЯ ПЕЧЬ | 0 |
|
SU173254A1 |
| ПРИВОД ЛЕНТОЧНОГО КОНВЕЙЕРА | 0 |
|
SU206387A1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2563074C1 |
| WO 2013157978 A1, 24.10.2013. | |||

