Изобретение относится к специальным самоходным транспортным средствам высокой проходимости. Транспортное средство с колесно-шагающим движителем (в дальнейшем транспортное средство) включает переднюю и заднюю корпусные секции, соединенные между собой сцепным устройством, обеспечивающим поворот корпусных секций друг относительно друга вокруг продольной оси транспортного средства и в горизонтальной плоскости, а также левый и правый механизмы поворота продольных рычагов на каждой корпусной секции. Каждые два продольных рычага попарно одним концом закреплены на оси каждого механизма поворота продольных рычагов, а другие концы продольных рычагов связаны с ведущими колесами транспортного средства. Каждое колесо содержит привод вращения, обеспечивающий передвижение транспортного средства. Каждая ось механизма поворота продольных рычагов имеет упругодемпфирующую связь с корпусной секцией, а при необходимости может быть жестко зафиксирована относительно корпусной секции. Каждый продольный рычаг может быть повернут на заданный угол относительно связанной с ним оси механизма поворота продольных рычагов в интервале 360°, а при необходимости может быть жестко зафиксирован относительно этой оси.
За счет поворота продольных рычагов относительно связанных с ними осей механизмов поворота продольных рычагов обеспечивается изменение дорожного просвета транспортного средства, а также возможность преодоления крупных единичных препятствий типа эскарп, контрэскарп, траншея, лестница. Незаблокированные упругодемпфирующие связи осей механизмов поворота продольных рычагов с корпусными секциями обеспечивают значительные величины перемещения колес транспортного средства относительно корпусных секций, что в совокупности с возможностью неуправляемого поворота корпусных секций друг относительно друга вокруг продольной оситранспортного средства при движении с большой скоростью по пересеченной местности с высокими неровностями снижает вероятность отрыва колес от опорного основания. Это свойство обеспечивает повышение устойчивости, управляемости, быстроходности и безопасности движения транспортного средства.
Управляемый поворот корпусных секций друг относительно друга в горизонтальной плоскости в совокупности с возможностью вращения колес транспортного средства с разными угловыми скоростями обеспечивает возможность криволинейного движения, что повышает маневренность транспортного средства.
Изобретение относится к специальным самоходным транспортным средствам высокой проходимости и может быть использовано в сухопутных роботах, применяемых как в боевых целях, так и в целях ликвидации последствий чрезвычайных ситуаций.
Известно транспортное средство высокой проходимости, включающее раму или корпус, двигатели или приводы вращения колес и четыре продольных рычага подвески, на одном конце которых установлены колеса, а другие концы соединены с валами рычагов подвески, установленными в раме и соединенными с торсионами, приводами поворота продольных рычагов подвески и средствами блокировки валов рычагов подвески, а также электронную систему управления движением, содержащую процессор, соединенныйсдатчиками угловых и линейных ускорений, отличающееся тем, что длина и положение рычагов подвески в корпусе, а также внешний диаметр колес обеспечивают выполнение следующих условий: в положении рычагов подвески, так, чтобы колеса находились над крышей транспортного средства, окружности колес превышают уровень крыши транспортного средства, образуя клиренс, обеспечивающий движение или стабилизацию корпуса в таком положении, а в положении рычагов подвески вплоскости, проходящейчерез оси продольных рычагов подвески, так чтобы рычаги подвески при этом были повернуты в одном направлении, между окружностями колес имеется зазор, позволяющий колесам свободно вращаться, при этом центр тяжести транспортного средства находится между осями валов задних рычагов подвески и осями задних колес или между осями валов передних рычагов подвески и осями передних колес (патент РФ RU 2554900 С2 B62D 57/028 /2006.01/). Данное транспортное средство не способно преодолевать эскарпы высотой, превышающей радиус колеса.
Известно транспортное средство с рычаг-колесами, состоящее из корпуса, связанного рычагами с колесами, а также упруго-демпфирующих буферов двух типов. Первые связывают рычаги с корпусом, вторые встроены в рычаги (US 8887842 В2 B60G3 /00 /2006.01/, B26D 51/06 /2006.01/, B60G3/08 /2006.01/, B60G11/16/2006.01/).
Данное транспортное средство не может преодолевать крупные единичные препятствия (эскарпы, траншеи) ввиду отсутствия приводов поворота рычагов.
Наиболее близким к заявляемому изобретению является патент США (US 6112843 В60K 17/00 /2000.05/) - высокомобильное транспортное средство для движения по пересеченной местности, содержащее корпус, левый и правый приводные механизмы. Каждый приводной механизм содержит первую и вторую тяги для восприятия нагрузок между транспортным средством и опорной поверхностью. Каждая тяга может поворачиваться вокруг третьей оси. Транспортное средство содержит приводы, обеспечивающие поворот корпуса вокруг третьей оси и поворот каждой тяги вокруг своей оси.
Недостатками данного транспортного средства являются:
1. низкая профильная проходимость, обусловленная ограничениями по углам поворота тяг без потери устойчивости;
2. низкая скорость движения по пересеченной местности ввиду отсутствия упруго-демпфирующей связи между корпусом и третьей осью;
3. низкая грузоподъемность, которая ограничивается числом колес.
Цель изобретения: повышение маневренности, управляемости, быстроходности, проходимости и безопасности транспортного средства за счет возможности преодоления эскарпов, контрэскарпов, траншей, лестниц, а также возможности движения по пересеченной местности с высокой скоростью без отрыва колес от опорного основания.
Эта цель достигается следующим путем.
1. При зафиксированных осях механизмов поворота продольных рычагов относительно корпусных секций за счет поворота каждого продольного рычага с колесом относительно связанной с ним оси механизма поворота продольных рычагов на заданный угол обеспечивается преодоление крупных единичных препятствий (эскарпов, контрэскарпов, траншей, лестниц).
2. При зафиксированных продольных рычагах относительно связанных с ними осей механизмов поворота продольных рычагов и наличии упруго-демпфирующих связей между осями механизмов поворота продольных рычагов и корпусными секциями в совокупности с возможностью неуправляемого поворота корпусных секций друг относительно друга вокруг продольнойоси транспортного средства обеспечивается возможность движения с большой скоростью по пересеченной местности с высокими неровностями, при этом снижается вероятность отрыва колес от опорного основания. Этим обеспечивается повышение устойчивости, управляемости, быстроходности и безопасности движения транспортного средства.
3. Управляемый поворот корпусных секций друг относительно друга в горизонтальной плоскости в совокупности с возможностью вращения колес транспортного средства с разными угловыми скоростями обеспечивает возможность криволинейного движения, что повышает маневренность транспортного средства.
4. Электронная система управления движением содержит набор программ управления, обеспечивающих автоматическое выполнение движений продольных рычагов, складывания корпусных секций в горизонтальной плоскости, поддержания заданной скорости вращения колес.
Новым в изобретении является следующее.
1. Левая и правая оси механизмов поворота продольных рычагов каждой корпусной секции с закрепленными на них продольными рычагами имеют упругодемпфирующую связь с корпусной секцией в окружном направлении, а также при необходимости могут быть жестко зафиксированы относительно корпусной секции. Каждый продольный рычаг может быть повернут на заданный угол относительно связанной с ним оси механизма поворота продольных рычагов в интервале 360°, а при необходимости может быть жестко зафиксирован относительно этой оси. Это обеспечивает выполнение следующих условий.
1.1. Левая и правая оси каждого механизма поворота продольных рычагов каждой корпусной секции с закрепленными на них продольными рычагами жестко зафиксированы относительно корпусной секции, каждый продольный рычаг с колесами независимо от других продольных рычагов может быть повернут на заданный угол по команде системы управления. Соблюдение данного условия обеспечивает транспортному средству свойство проходимости при преодолении крупных единичных препятствий (эскарпов, контрэскарпов, траншей, лестниц).
1.2. Левая и правая оси каждого механизма поворота продольных рычагов каждой корпусной секции с закрепленными на них продольными рычагами имеют упругодемпфирующую связь с корпусной секцией в окружном направлении. Каждый продольный рычаг с колесом жестко зафиксирован относительно этой оси. Соблюдение данного условия обеспечивает транспортному средству свойства быстроходности, управляемости и безопасности при движении по пересеченной местности.
2. Процессор управления движением содержит программу управления вращением каждого колеса в сочетании с поворотом корпусных секций в горизонтальной плоскости.
3. Процессор управления движением содержит программу преодоления стандартных препятствий - эскарпов, контрэскарпов, траншей, лестниц - путем индивидуального управления поворотом каждого продольного рычага с колесом.
4. Процессор управления движением содержит программу движения по пересеченной местности.
Отличия 2-4 известны и используются в роботах различных конструкций, но в сочетании с пунктом 1 нигде не описаны и обладают новизной.
Перечень фигур чертежей
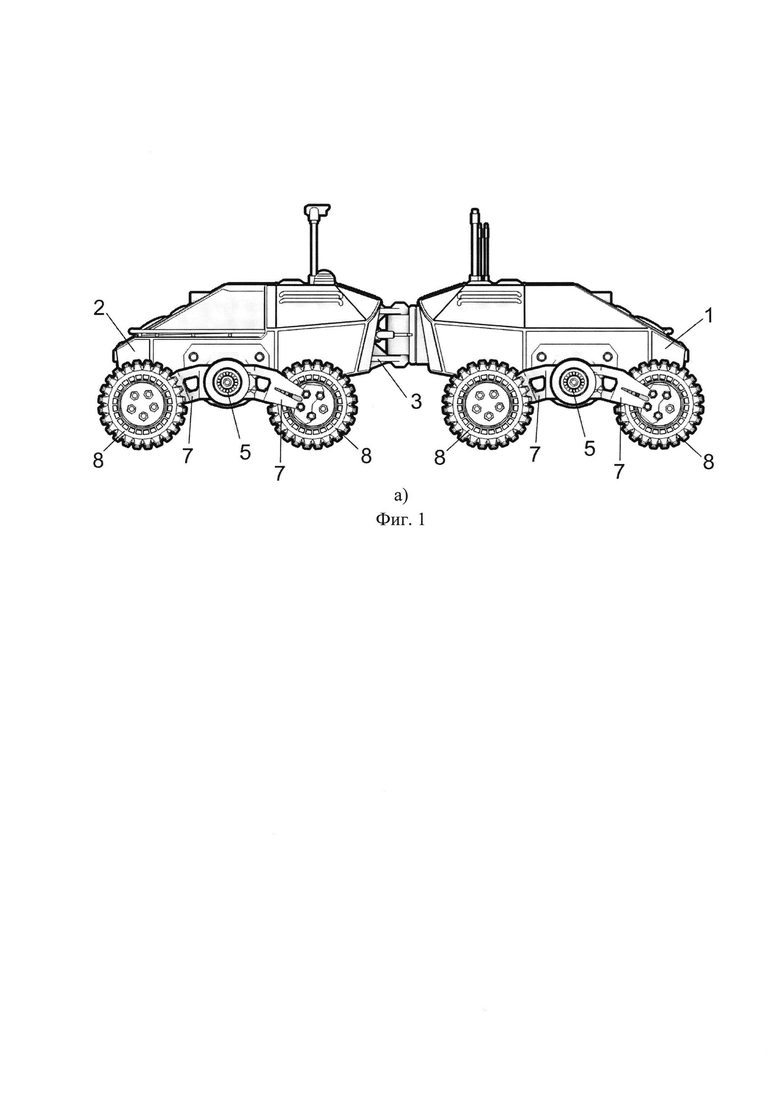
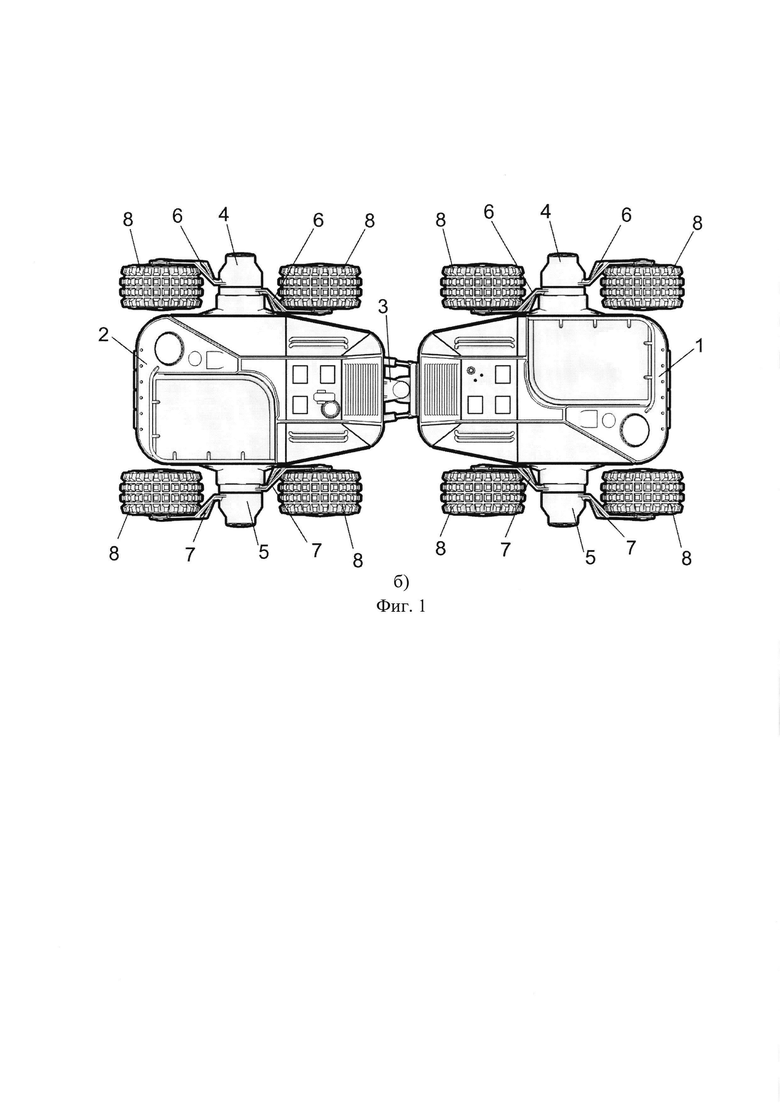
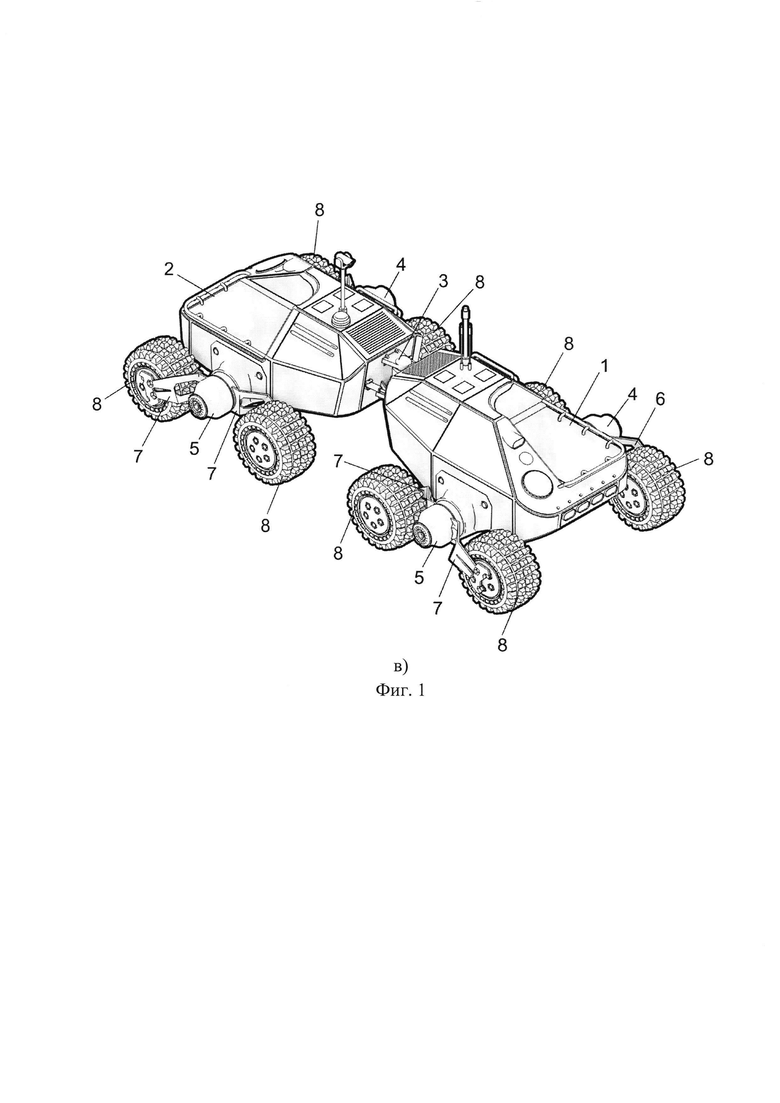
На прилагаемых чертежах представлено сочлененной транспортное средство с колесно-шагающим движителем. На фиг. 1 цифрами обозначены:
1 - передняя корпусная секция
2 - задняя корпусная секция
3 - сцепное устройство
4 - левые механизмы поворота продольных рычагов
5 - правые механизмы поворота продольных рычагов
6 - левые продольные рычаги
7 - правые продольные рычаги
8 - колеса
На фиг. 2 цифрами обозначены:
1 - передняя корпусная секция
2 - задняя корпусная секция
9 -продольная ось сцепного устройства
10 - вертикальная ось сцепного устройства
11 - управляющие актуаторы
На фиг. 3 цифрами обозначены:
1 (или 2) - передняя (или задняя) корпусная секция
7 - продольные рычаги
8 - колеса
12 - ось механизма поворота продольных передних и задних рычагов
13 - торсионный вал
14 - демпфер крутильных колебаний
15, 16 - шлицевые соединения
17,18 - стаканы
19, 20 - солнечные шестерни
21, 22 - электродвигатели
23, 24 - водила
25, 26 - подшипниковые опоры водил
27, 28, 29, 30 - подшипниковые опоры сателлитов
31, 32, 33, 34 - сателлиты
35, 36 - коронные шестерни
37, 38 - корпусные детали
39, 40, 41, 42, 43 - подшипниковые узлы корпусных деталей
44 - зубчатая муфта блокировки поворота оси относительно корпусной секции
45, 46 - зубчатые муфты блокировки продольных рычагов относительно оси
47 - подшипниковая опора оси
48, 49, 50, 51, 52 - уплотнительные устройства
Описание устройства
Транспортное средство (Фиг. 1 а-в) включает переднюю 1 и заднюю 2 корпусные секции, соединенные между собой сцепным устройством 3. Передняя и задняя корпусные секции снабжены левым 4 и правым 5 механизмами поворота продольных левых (передних и задних) 6 и правых (передних и задних) 7 рычагов, связанных каждый со своим ведущим колесом 8. Все ведущие колеса снабжены индивидуальным тяговым приводом.
Сцепное устройство (Фиг. 2) обеспечивает поворот передней 1 и задней 2 корпусных секций друг относительно друга вокруг двух осей. Неуправляемый поворот корпусных секций осуществляется вокруг продольной оси 9 транспортного средства, а регулируемый поворот корпусных секций - вокруг вертикальной оси 10 (в горизонтальной плоскости). Управление поворотом вокруг вертикальной оси обеспечивается с помощью управляющих актуаторов 11 по команде системы управления.
Механизм поворота продольных передних и задних рычагов (Фиг. 3) содержит ось 12, связанную с корпусной секцией передней 1 или задней 2 в окружном направлении с помощью торсионного вала 13 и демпфера крутильных колебаний 14. Торсионный вал, в свою очередь, соединен с корпусной секцией посредством шлицевого соединения 15 и с демпфером крутильных колебаний посредством шлицевого соединения 16. На оси 12 жестко закреплены стаканы 17 и 18 и солнечные шестерни 19 и 20. Внутри стаканов установлены электродвигатели 21 и 22, приводящие во вращение водила 23 и 24, которые установлены на оси 12 на подшипниковых опорах 25 и 26. На осях каждого водила на подшипниковых опорах 27, 28, 29 и 30 установлены сателлиты 31, 32, 33 и 34. Сателлиты 31 и 32 находятся в зацеплении с солнечной шестерней 19 и с коронной шестерней 35. Сателлиты 33 и 34 находятся в зацеплении с солнечной шестерней 20 и с коронной шестерней 36. Коронная шестерня 35 выполнена заодно с корпусной деталью 37, коронная шестерня 36 - заодно с корпусной деталью 38. Корпусная деталь 38 может вращаться относительно оси 12 (обеспечивается подшипниковым узлом 39), относительно стакана 18 (обеспечивается подшипниковым узлом 40) и относительно корпусной секции 1 или 2 (обеспечивается подшипниковым узлом 41). Корпусная деталь 37 может вращаться относительно оси 12 (обеспечивается подшипниковым узлом 42) и относительно стакана 17 (обеспечивается подшипниковым узлом 43). Корпусные детали 37 и 38 жестко связаны с продольными рычагами 7, на другом конце которых установлены ведущие колеса 8 с тяговым приводом.
Электродвигатели 21 и 22, солнечные шестерни 19 и 20, сателлиты 31, 32, 33, 34 и коронные шестерни 35 и 36 образуют планетарные мотор-редукторы, с помощью которых обеспечивается поворот продольных рычагов 7 с колесами 8 на любой угол в интервале 360°.
Блокировка поворота оси 12 относительно корпусной секции 1 или 2 обеспечивается с помощью зубчатой муфты 44. Блокировка продольных рычагов 7 относительно оси 12 обеспечивается зубчатыми муфтами 45 и 46. Для повышения жесткости крепления оси 12 в корпусной секции 1 или 2 используется подшипниковая опора 47. Для предотвращения попадания грязи из внешней среды во внутреннюю полость механизма поворота продольных передних и задних рычагов используются уплотнительные устройства 48, 49, 50, 51 и 52.
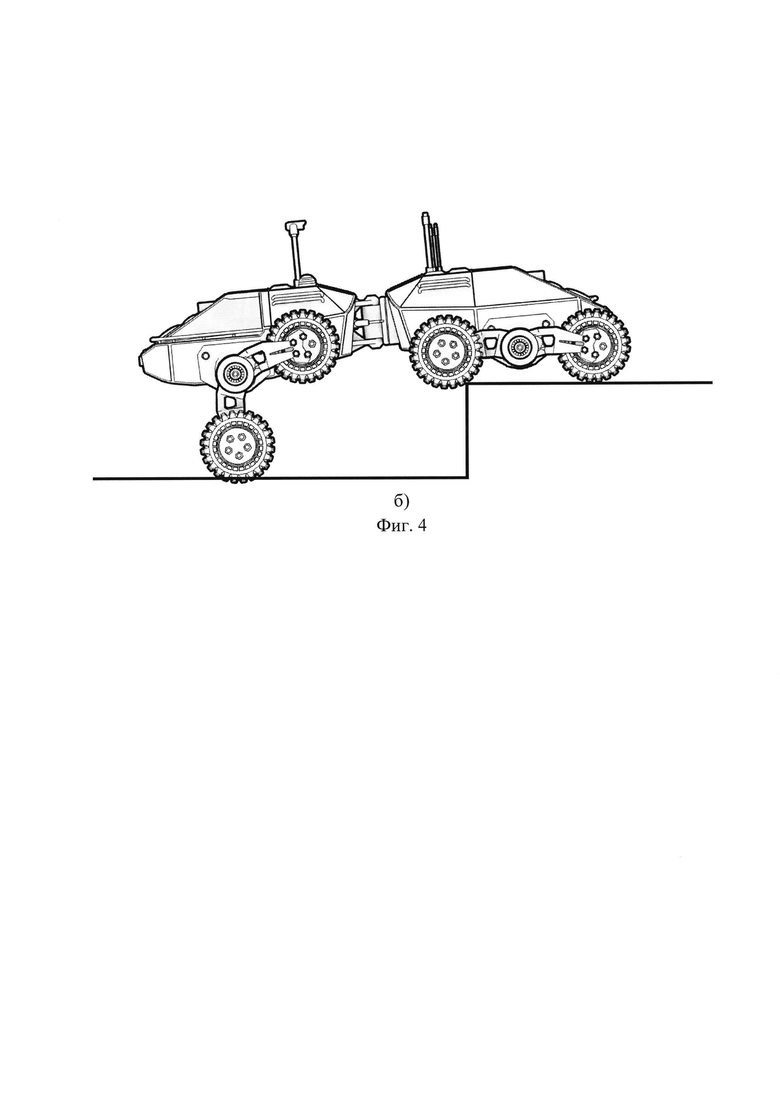
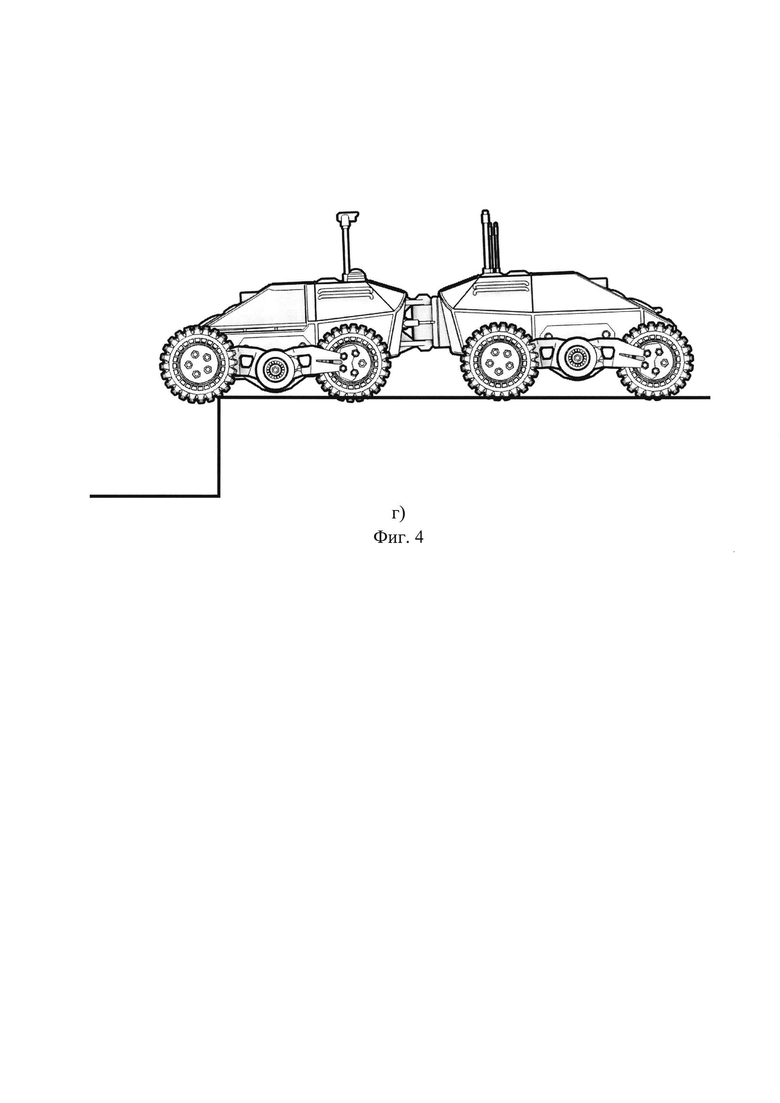
На Фиг. 4 показаны фазы преодоления эскарпа, высота которого существенно превышает радиус колеса транспортного средства. При этом оси (12, Фиг. 3) механизмов поворота (4 и 5, Фиг. 1) продольных рычагов заблокированы относительно корпусных секций (1 и 2, Фиг. 1), продольные рычаги (6 и 7, Фиг. 1) относительно осей механизмов поворота продольных рычагов могут поворачиваться по команде системы управления.
Фаза «а»: одна пара продольных рычагов с колесами каждой корпусной секции повернута вертикально вниз, за счет чего достигается максимальный дорожный просвет транспортного средства. Вторая пара продольных рычагов с колесами каждой корпусной секции повернута вперед (угол поворота зависит от высоты эскарпа), что обеспечивает заезд передних колес передней корпусной секции на край эскарпа.
Фаза «б»: передняя пара колес передней корпусной секции заехала на эскарп. Задние продольные рычаги передней корпусной секции поворачиваются на угол (зависит от высоты эскарпа), обеспечивающий беспрепятственный заезд второй пары колес передней корпусной секции на эскарп.
Фаза «в»:передняя пара колес задней корпусной секции заезжает на эскарп.
Фаза «г»:продольные рычаги задней пары колес задней корпусной секции поворачиваются на угол (зависит от высоты эскарпа),обеспечивающий беспрепятственный заезд второй пары колес задней корпусной секции на эскарп.
Фаза «д»: после заезда транспортного средства на эскарп все продольные рычаги поворачиваются на угол, обеспечивающий заданный дорожный просвет транспортного средства.
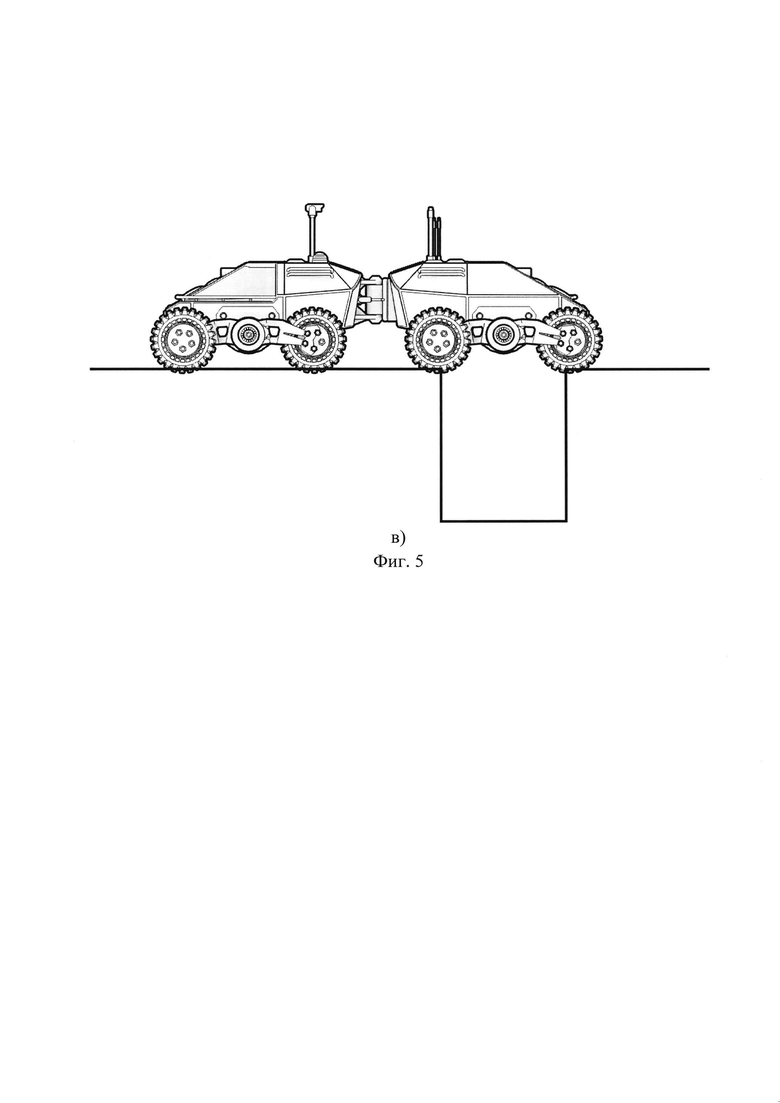
На Фиг. 5 показаны фазы преодоления транспортным средством траншеи. При этом оси (12, Фиг. 3) механизмов поворота (4 и 5, Фиг. 1) продольных рычагов заблокированы относительно корпусных секций(1 и 2, Фиг. 1), продольные рычаги (6 и 7, Фиг. 1) относительно осей механизмов поворота продольных рычагов могут поворачиваться по команде системы управления.
Фаза «а»: при подходе к траншее все продольные рычаги поворачиваются таким образом, чтобы расстояния между центрами передних и задних колес каждой корпусной секции стало больше ширины траншеи.
Фазы «б-д»:транспортное средство преодолевает траншею.
Фаза «е»: после преодоления транспортным средством траншеи все продольные рычаги поворачиваются на угол, обеспечивающий заданный дорожный просвет транспортного средства.
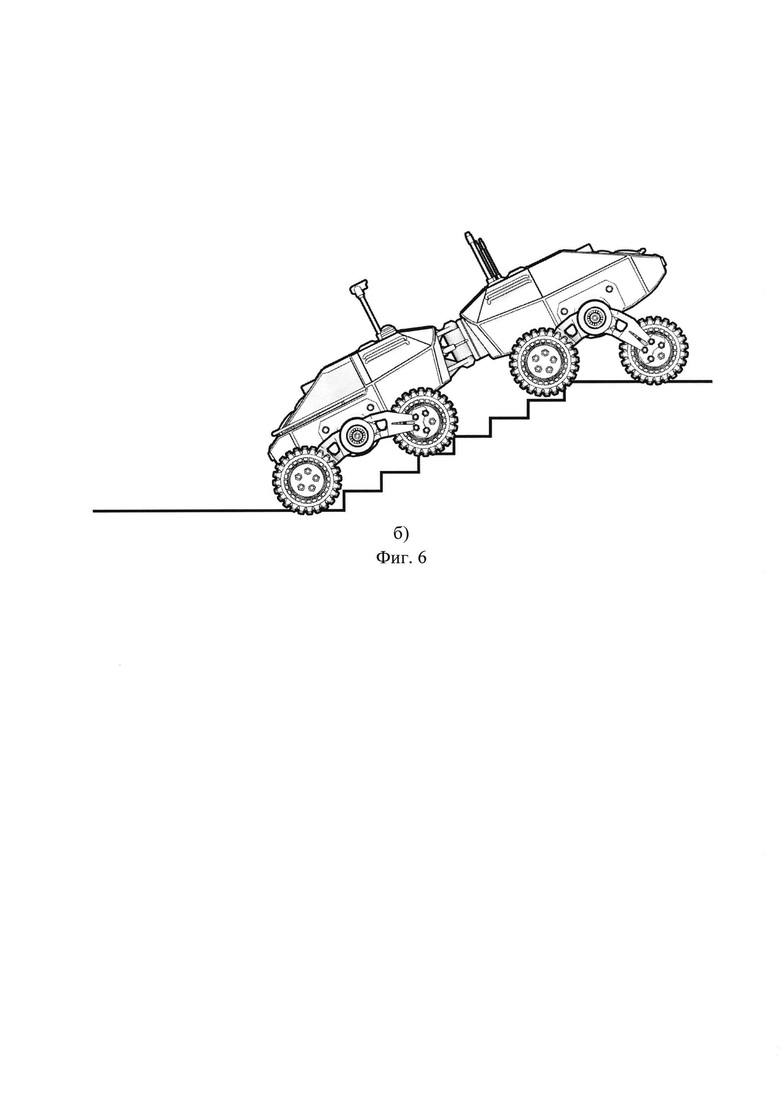
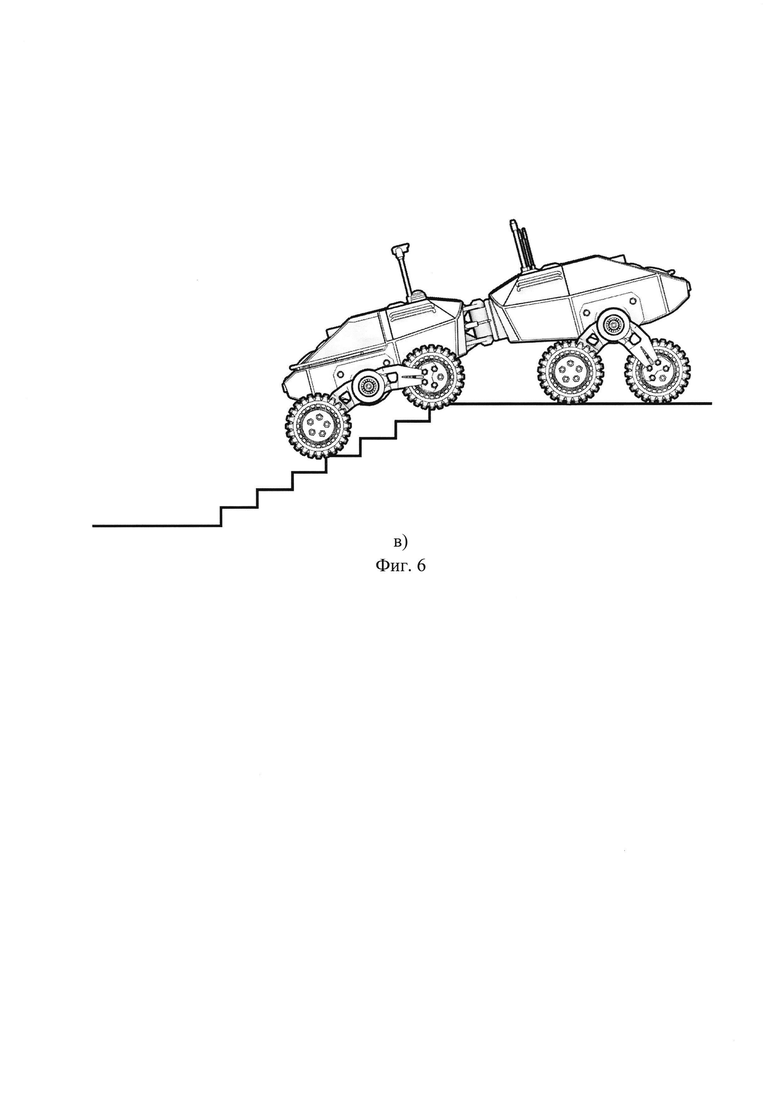
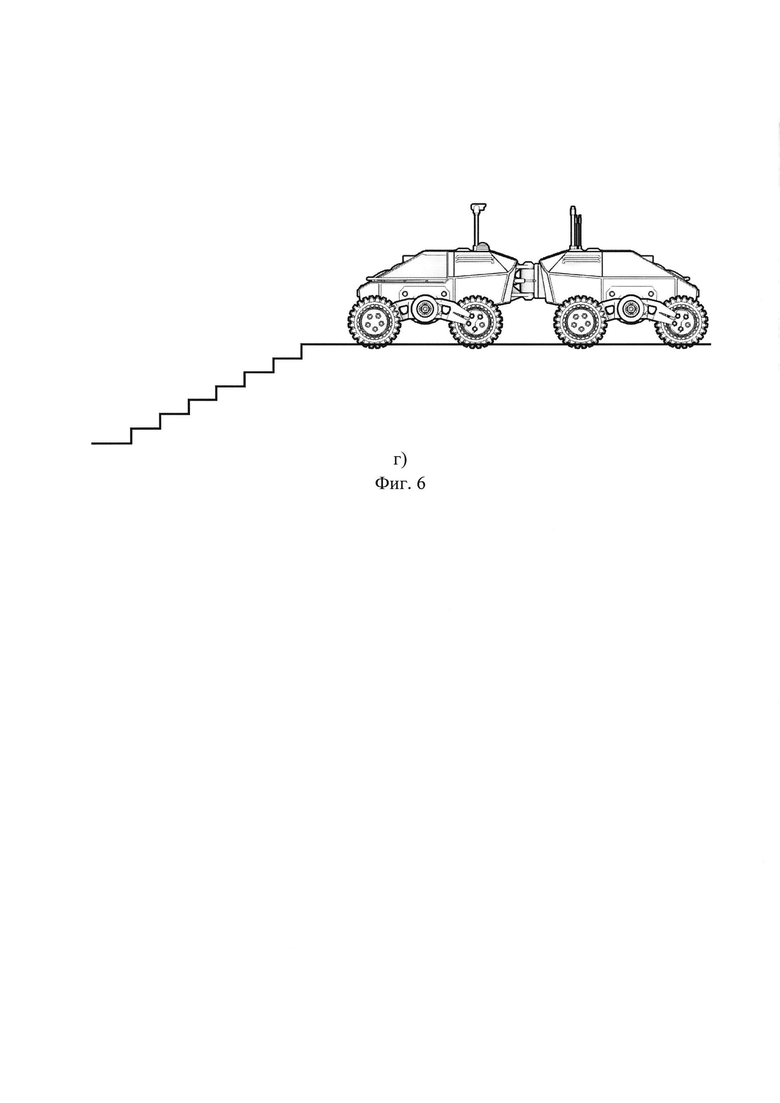
На Фиг. 6 показаны фазы подъема транспортного средства на лестницу. При этом оси (12, Фиг. 3) механизмов поворота (4 и 5, Фиг. 1) продольных рычагов заблокированы относительно корпусных секций(1 и 2, Фиг. 1), продольные рычаги (6 и 7, Фиг. 1) относительно осей механизмов поворота продольных рычагов могут поворачиваться по команде системы управления.
Фаза «а»: при подъеме транспортного средства на лестницу передние колеса передней корпусной секции преодолели подъем и вышли на ровную опорную поверхность.
Фазы «б-в»: продольные рычаги передних колес передней корпусной секции поворачиваются по часовой стрелке, при этом транспортное средство как бы подтягивается вверх, преодолевая сопротивление подъему остальных колес на ступеньки.
Фаза «г»: после преодоления транспортным средством лестницы все продольные рычаги поворачиваются на угол, обеспечивающий заданный дорожный просвет транспортного средства.
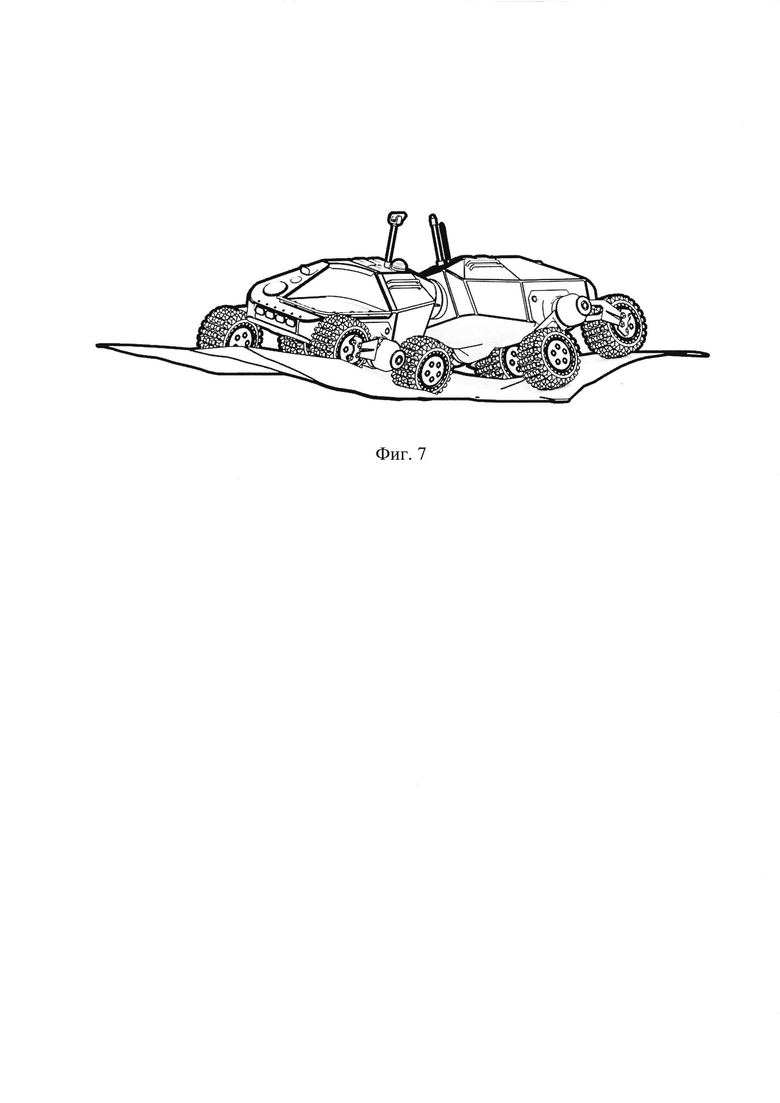
На Фиг. 7 показано движение транспортного средства по неровностям опорного основания, высота которых соизмерима с радиусом колес. Все оси (12, Фиг. 3) механизмов поворота (4 и 5, Фиг. 1) продольных рычагов относительно корпусных секций (1 и 2, Фиг. 1) разблокированы и имеют с ними упругодемпфирующую связь в окружном направлении. Все продольные рычаги (6 и 7, Фиг. 1) относительно связанных с ними осей механизмов поворота продольных рычагов жестко заблокированы. В такой конфигурации продольные рычаги с осями механизмов поворота продольных рычагов выполняют роль балансирной подвески колес. Совместная работа балансирной подвески колес и сцепного устройства (3, Фиг. 1), позволяющего корпусным секциям поворачиваться друг относительно друга вокруг продольной оси транспортного средства, обеспечивает возможность транспортному средству двигаться с большой скоростью без отрыва колес от опорного основания.
Транспортное средство работает следующим образом.
При колесном движении по дороге или пересеченной местности продольные рычаги предварительно с помощью механизмов поворота продольных рычагов устанавливаются в положение, обеспечивающее необходимый дорожный просвет транспортного средства. После этого в каждом механизме поворота продольных рычагов поворот рычагов 7 (Фиг. 3) относительно оси 12 (Фиг. 3) жестко блокируется с помощью зубчатых муфт 45 и 46 (Фиг. 3). Блокирующая муфта 44 (Фиг. 3) разблокирована, вследствие чего ось 12 (Фиг. 3) может поворачиваться относительно корпусной секции 1 или 2 (Фиг. 3), имея с ней упруго демпфирующую связь в виде торсионного вала 33 (Фиг. 3) и демпфера крутильных колебаний 14 (Фиг. 3). В результате при движении транспортного средства по неровностям опорного основания обеспечивается большой ход колес 8 (Фиг. 1), а жестко зафиксированные относительно оси механизма поворота продольные рычаги 6 и 7 (Фиг. 1) выполняют роль балансирной подвески.
При колесно-шагающем движении ось 12 (Фиг. 3) жестко фиксируется относительно корпусной секции 1 или 2 (Фиг. 3) с помощью зубчатой блокирующей муфты 44 (Фиг. 3). Зубчатые муфты 45 и 46 (Фиг. 3) разблокированы, что позволяет поворачивать рычаги 7 (Фиг. 3) независимо друг от друга на 360°. Приводы вращения колес при этом могут работать. Этим обеспечивается колесно-шагающий ход транспортного средства при преодолении эскарпов (Фиг. 4), контрэскарпов (Фиг. 5), траншей (Фиг. 6) и лестниц (Фиг. 7).
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО ВЫСОКОЙ ПРОХОДИМОСТИ | 2013 |
|
RU2554900C2 |
| КОЛЁСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДА | 2013 |
|
RU2542220C1 |
| СТАБИЛИЗАТОР КУРСА ДВИЖЕНИЯ ШАССИ ТРАНСПОРТНОГО СРЕДСТВА ПО СТУПЕНЯМ | 2013 |
|
RU2538653C1 |
| Многоцелевой подводный аппарат | 2023 |
|
RU2806880C1 |
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА | 2004 |
|
RU2279628C2 |
| ТЯГОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 1999 |
|
RU2163209C1 |
| АМФИБИЯ | 2007 |
|
RU2520665C2 |
| СТЕНД ДЛЯ РЕГУЛИРОВАНИЯ УГЛОВ УСТАНОВКИ КОЛЕС АВТОМОБИЛЯ | 2006 |
|
RU2310181C1 |
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА С ПОВЫШЕННОЙ ПРОХОДИМОСТЬЮ НА СЛАБЫХ ГРУНТАХ | 2016 |
|
RU2653407C1 |
| ТРАНСПОРТНОЕ УСТРОЙСТВО ШИШКОВА | 1991 |
|
RU2034731C1 |











Изобретение относится к самоходным транспортным средствам высокой проходимости. Сочлененное транспортное средство с колесно-шагающим движителем включает переднюю и заднюю корпусные секции, левый и правый механизмы поворота продольных рычагов на каждой корпусной секции. Корпусные секции соединены между собой сцепным устройством, обеспечивающим поворот корпусных секций относительно друг друга вокруг продольной оси и в горизонтальной плоскости. Каждые два продольных рычага попарно одним концом закреплены на оси каждого механизма поворота продольных рычагов. Другие концы продольных рычагов связаны с ведущими колесами транспортного средства. Каждое колесо содержит привод вращения. Каждая ось механизма поворота продольных рычагов имеет упругодемпфирующую связь с корпусной секцией. При необходимости ось может быть жестко зафиксирована относительно корпусной секции. Каждый продольный рычаг может быть повернут на заданный угол относительно связанной с ним оси механизма поворота продольных рычагов в интервале 360°, а при необходимости может быть жестко зафиксирован относительно этой оси. Достигается повышение проходимости, устойчивости, управляемости, быстроходности и безопасности движения транспортного средства. 21 ил.
Сочлененное транспортное средство с колесно-шагающим движителем, включающее переднюю и заднюю корпусные секции, соединенные между собой сцепным устройством, обеспечивающим поворот корпусных секций относительно друг друга вокруг продольной оси транспортного средства и в горизонтальной плоскости, а также левый и правый механизмы поворота двух продольных рычагов на каждой корпусной секции, при этом один конец каждого продольного рычага закреплен на оси механизма поворота продольных рычагов, а другой конец каждого продольного рычага соединен с ведущим колесом, отличающееся тем, что каждая ось механизмов поворота продольных рычагов имеет упругодемпфирующую связь с корпусной секцией, а при необходимости может быть жестко зафиксирована относительно корпусной секции, а каждый продольный рычаг может быть повернут на заданный угол относительно связанной с ним оси механизма поворота продольных рычагов в интервале 360°, а при необходимости может быть жестко зафиксирован относительно этой оси.
| Способ измерения радиации | 1934 |
|
SU45678A1 |
| Колесно-шагающий движитель | 1975 |
|
SU541718A1 |
| US 3481418 A, 02.12.1969 | |||
| US 3057319 A, 09.10.1962 | |||
| US 3747717 A, 24.07.1973. | |||

