Изобретение относится к транспортному машиностроению, а именно к конструкции транспортных средств на роторно-винтовом движителе, предназначенных для автономного перемещения под водой, в том числе по донным грунтам морей, в переходных сильно обводненных средах (болотах), а также на природных космических телах.
Известно «Устройство и способ работы движителя для надводного и подводного транспорта» (патент на изобретение 2665103, опубл. 28.08.2018 г.). Движитель сигарообразной формы состоит из двух шнеков с саблевидными лопастями, направленными в разные стороны, между шнеками установлен двигатель. При вращении шнеков в противоположные стороны движитель перемещается вперед без излишнего шума и вибрации. Действительно, опыт создания шнековых вездеходов-амфибий в России, Японии и в других странах (А.П. Куляшов, В.Е. Колотилин «Экологичность движителей транспортно-технологических машин», Москва, Машиностроение, 1993, см. табл. 2.13 на стр. 192) подтверждает положительный эффект в работе предлагаемого устройства. Однако, для создания необходимого упора, а значит и потребного тягового усилия, необходимо развивать высоту лопасти, что приводит к увеличению габаритов транспортного средства и сокращению полезного объема его корпуса.
Встраивание двигателя в полое тело шнека, («Шнековый движитель», патент на полезную модель 167 625, опубл. 10.01.2017 г.), позволяет несколько сократить габаритные размеры движителя, однако существенно усложняет его устройство.
Известны «Глубоководный аппарат с водометным движителем». (патент на полезную модель 174716, опубл. 30.10.2017 г.) и «Винтолопастной электромагнитный движитель глубоководного применения», (патент на полезную модель 179428, опубл. 15.05.2018 г.), для скоростных подводных аппаратов, не имеющих контакта с донной поверхностью. У предложенных в данных устройствах движителей упор (тяга) зависит от скорости отбрасываемой струи. Поэтому маневрирование скоростью, создание тягового усилия на малых скоростях, характерных для технологических транспортных средств, практически невозможно.
Известно «Универсальное транспортное средство» (патент на полезную модель 180 701, опубл. 21.06.2018 г.), для движения в любых средах от грунтовой поверхности до воды, оснащенное роторно-винтовым движителем, размещенным на платформе, на которую в свою очередь опирается через опорные катки корпус транспортного средства, так что роторно-винтовой движитель может поворачиваться относительно продольной оси транспортного средства на 180о , что обеспечивает повышение маневренности транспортного средства. Подвижное соединение платформы роторно-винтового движителя с корпусом транспортного средства, обеспечивающее изменение (регулирование) положения корпуса машины относительно движителя (его продольной оси), позволяет использовать движитель в режиме движения лагом (когда роторы обоих бортов вращаются в одну сторону) и роторы работают как катки, а направление движения корпуса машины перпендикулярно продольной оси роторов. Данное устройство наиболее полно соответствует предлагаемому техническому решению, однако обладает рядом существенных недостатков. Во-первых, оно не дает возможности движения по сильно пересеченному донному рельефу, т.к. роторы движителя представляют собой жесткие балки, оси которых закреплены в неподвижных опорах платформы. Во-вторых, вследствие жесткого закрепления опор роторов, при движении машины по косогору корпус машины испытывает крен, что ограничивает применение транспортного средства совместно с некоторыми рабочими органами (например, землеройными или кабелеукладочными). И в-третьих, движение продольной оси роторов по криволинейной траектории при маневрировании машины осуществляется т.н. бортовым поворотом, т.е. за счет разности тяговых усилий движителей обоих бортов. Такой способ поворота вызывает увод машины с траектории движения из-за возрастающего сопротивления движению и повороту, повышенное буксование на слабых грунтах, что также затрудняет использование транспортного средства как базы технологической машины.
Технический результат - обеспечение наиболее полной приспосабливаемости роторно-винтового движителя к поверхности пути, максимального контакта роторов с грунтом, минимизации крена корпуса при движении по косогору, сохранение устойчивого движения корпуса по заданной криволинейной траектории и наиболее полной реализации тяговых возможностей по сцеплению движителя с грунтом.
Технический результат достигается тем, что в универсальном транспортном средстве с роторно-винтовым движителем, включающем корпус и роторно-винтовой движитель, роторно-винтовой движитель состоит из модулей, закрепленных на корпусе транспортного средства подвижно, например, по два с каждого борта с помощью трехточечной подвески, а каждый модуль роторно-винтового движителя состоит из двух полуроторов, установленных соосно с возможностью независимого вращения в подвижном опорном каркасе, закрепленном поворотно и управляемом гидроцилиндрами в вертикальной и горизонтальной плоскостях, и каждый полуротор приводится во вращение встроенным в него гидромотором.
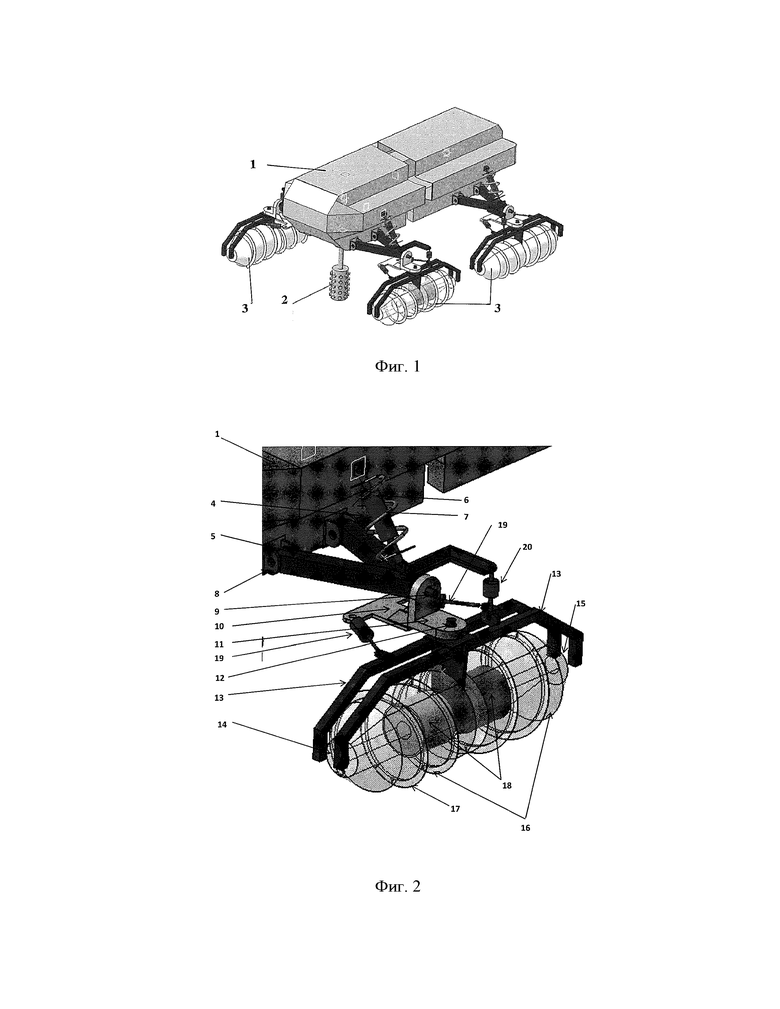
Устройство униыверсального транспортного средства с роторно-винтовым движителем поясняется чертежами на которых на фиг. 1 представлен общий вид транспортного средства, на фиг. 2 – роторно-винтовой модуль, а на фиг. 3 – адаптация движителя к условиям движения. На чертежах обозначены позиции: 1 – корпус транспортного средства, 2 – рабочий орган, 3 – роторно-винтовой модуль, 4 – трехточечная подвеска, 5 – у-образный рычаг, 6 – гидроцилиндр-амортизатор, 7 – цилиндрическая пружина, 8 – кронштейн, 9 – цапфа, 10 – поворотная переходная опора, 11 – проушина, 12 – шкворень, 13 – опорный каркас модуля, 14 и 15 – опоры полуротора, 16 – полуротор, 17 – винтовая лопасть, 18 – гидромотор, 19 и 20 - гидроцилиндры
Глубоководное транспортное средство состоит из корпуса транспортного средства 1 с рабочим органом 2, На корпусе 1 подвижно размещены роторно-винтовые модули 3, например, по два с каждого борта. Каждый модуль 3 закреплен на корпусе 1 с помощью трехточечной подвески 4, состоящей из у-образного рычага 5, гидроцилиндра-амортизатора 6 и цилиндрической пружины 7. У-образный рычаг 5 соединен с корпусом через кронштейны 8, а на свободном его конце на цапфе 9 насажена поворотно переходная опора 10, на проушине 11 которой закреплен также подвижно с помощью шкворня 12 опорный каркас модуля 13, в котором в опорах полуроторов 14 и 15 с возможностью независимого вращения соосно установлены два полуротора 16 с винтовыми лопастями 17 противоположного направления навивки. Внутри каждого полуротора 16 размещен гидромотор 18, приводящий его во вращение. Перемещение и фиксацию в заданном положении подвижных частей роторно-винтового модуля 3 обеспечивают гидроцилиндры 19, соединяющие по обе стороны от проушины 11 переходную опору 10 с опорным каркасом модуля 13, и гидроцилиндры 20, установленные между у-образным рычагом 5 и опорным каркасом модуля 13.
Устройство работает следующим образом.
При прямолинейном движении транспортного средства по неровностям донной поверхности и наезде роторно-винтового модуля 3 на препятствие под действием вертикальной реакции опорный каркас модуля 13 поворачивается вместе с переходной опорой 10 относительно оси цапфы 9 у-образного рычага 5. Гидроцилиндр 20 не препятствует повороту опорного каркаса модуля, находясь в плавающем положении. Под действием этой же силы у-образный рычаг 5 поворачивается в кронштейнах 8 вверх и сжимает гидроцилиндр-амортизатор 6 и цилиндрическую пружину 7. Силы сопротивления гидроцилиндра-амортизатора 6 и цилиндрической пружины 7 трехточечной подвески 4 препятствуют отрыву полуроторов 16 от грунтовой поверхности и обеспечивают контакт винтовых лопастей 17 с грунтом. В то же время корпус 1 транспортного средства испытывает минимальные перемещения, как и закрепленный на нем рабочий орган 2. Однако, положение у-образного рычага 5 и опорного каркаса модуля 13 относительно их осей поворота может быть зафиксировано с помощью гидроцилиндра-амортизатора 6 и гидроцилиндра 20 соответственно.
Поворот транспортного средства осуществляется с помощью изменения направления движения полуроторов 16 роторно-винтовых модулей 3. При входе в поворот гидроцилиндры 19 воздействуют на опорный каркас модуля 13, поворачивая его в заданном направлении относительно оси шкворня 12 в проушине 11 переходной опоры 10. В процессе поворота режим работы гидромоторов 18 не изменяется по сравнению с прямолинейным движением, что обеспечивает сохранение максимальных тяговых возможностей силового привода.
Привод каждого полуротора 16 осуществляется гидромотором 18 независимо от полуротора, расположенного соосно с ним. Привод выполнен так, что обеспечивает постоянный упор винтовых лопастей 17 в грунт. В процессе буксования или юза роторно-винтового модуля 3 скорости вращения каждого полуротора 16 изменяются автоматически, что также направлено на реализацию максимальных тяговых возможностей роторно-винтового движителя
Таким образом, устройство обеспечивает, в зависимости от рельефа местности и грунтовых условий, следующие режимы работы:
- качание роторно-винтового модуля 3 относительно оси кронштейнов 8 при движении по неровностям. В этом случае гидроцилиндр-амортизатор 6 и цилиндрическая пружина 7 работают как обычная трехточечная подвеска автомобиля; гидроцилиндр-амортизатор 6 находится в плавающем положении. С помощью гидроцилиндра-амортизатора 6 можно зафиксировать модуль в промежуточном положении, например, как показано на фиг. 3, а), вид спереди, когда транспортное средство движется по косогору, а его корпус 1 сохраняет горизонтальное положение, исключая боковые нагрузки на рабочий орган 2;
- качание или принудительный поворот переходной опоры 10 относительно оси цапфы 9 у-образного рычага 5. Свободное качание переходной опоры 10, а вместе с ней и опорного каркаса модуля 13 возможно при условии, что гидроцилиндр 20 находится в плавающем положении. Если гидроцилиндр 20 заперт в любом промежуточном положении, то опорный каркас модуля 13, а вместе с ним и полуроторы 16 находятся под некоторым углом к продольной оси корпуса 1. Такое положение полуроторов 16 обеспечивает им сохранение полного контакта с опорной поверхностью при преодолении неровностей и входе на подъем, как показано на фиг. 3, б), вид сбоку;
- движение транспортного средства по заданной криволинейной траектории осуществляется за счет поворота опорного каркаса модуля 13 в проушине 11 переходной опоры 10 относительно вертикальной оси шкворня 12 гидроцилиндрами 19. При этом продольные оси полуроторов могут занимать положение, например, как показано на фиг. 3, в), вид сверху;
- движение транспортного средства осуществляется за счет создания упора (тягового усилия) винтовыми лопастями 17 полуроторов 16, приводимых во вращение гидромоторами 18. Приводы полуроторов 16 каждого роторно-винтового модуля 3 работают независимо друг от друга так, чтобы компенсировать буксование или проскальзывание одного из полуроторов 16 и поддерживать постоянный упор винтовой лопасти 17 в грунтовой среде. Это повышает тяговую эффективность каждого роторно-винтового модуля 3 и всего транспортного средства.
Предложенное устройство движителя повышает тяговые возможности универсального транспортного средства с модульным роторно-винтовым движителем в режимах прямолинейного движения и поворота, на подъемах и косогорах, а также при оснащении его рабочими технологическими органами, обеспечивая их минимальную нагруженность от перекосов элементов конструкции, связанных с рельефом местности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоцелевой подводный аппарат | 2023 |
|
RU2806880C1 |
| Амфибийная роторно-винтовая платформа | 2023 |
|
RU2803514C1 |
| Роторно-винтовой движитель транспортного средства | 1980 |
|
SU918164A1 |
| ГУСЕНИЧНЫЙ ТРАНСПОРТЕР | 2003 |
|
RU2260541C2 |
| Корчеватель | 2021 |
|
RU2767353C1 |
| Амфибия | 1985 |
|
SU1284850A1 |
| Вездеход | 2023 |
|
RU2803970C1 |
| Устройство для очистки траншей | 1978 |
|
SU763534A1 |
| Движитель транспортного средства | 1978 |
|
SU781105A1 |
| ПЛАВАЮЩАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2019 |
|
RU2708497C1 |

Изобретение относится к конструкции транспортных средств на роторно-винтовом движителе. Универсальное транспортное средство с роторно-винтовым движителем включает корпус и роторно-винтовой движитель. Роторно-винтовой движитель состоит из модулей, закрепленных на корпусе транспортного средства подвижно по два с каждого борта с помощью трехточечной подвески. Каждый модуль роторно-винтового движителя состоит из двух полуроторов, установленных соосно с возможностью независимого вращения в подвижном опорном каркасе, закрепленном поворотно и управляемом гидроцилиндрами в вертикальной и горизонтальной плоскостях. Каждый полуротор приводится во вращение встроенным в него гидромотором. Достигается обеспечение полной приспосабливаемости роторно-винтового движителя к поверхности пути, максимального контакта роторов с грунтом, минимизации крена корпуса при движении по косогору, сохранение устойчивого движения корпуса по заданной криволинейной траектории и наиболее полной реализации тяговых возможностей по сцеплению движителя с грунтом. 3 ил.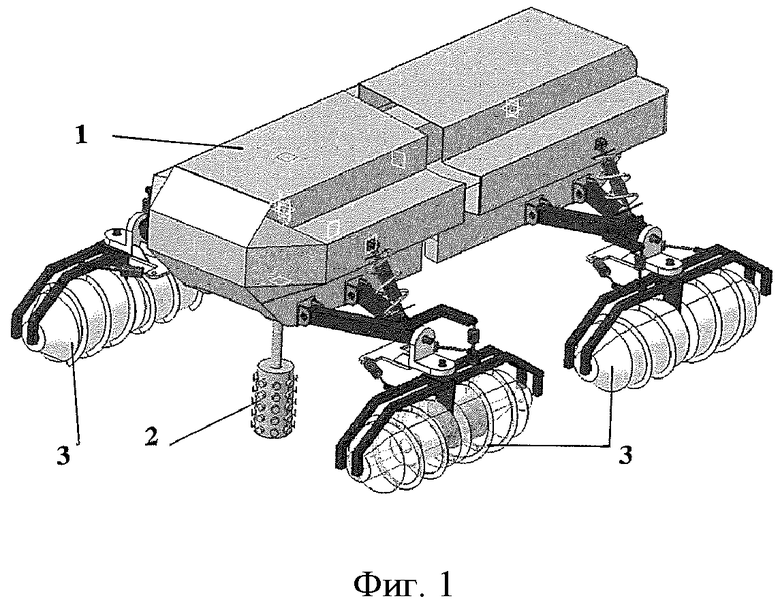
Универсальное транспортное средство с роторно-винтовым движителем, включающее корпус и роторно-винтовой движитель, отличающееся тем, что роторно-винтовой движитель состоит из модулей, закрепленных на корпусе транспортного средства подвижно, например, по два с каждого борта с помощью трехточечной подвески, а каждый модуль роторно-винтового движителя состоит из двух полуроторов, установленных соосно с возможностью независимого вращения в подвижном опорном каркасе, закрепленном поворотно и управляемом гидроцилиндрами в вертикальной и горизонтальной плоскостях, и каждый полуротор приводится во вращение встроенным в него гидромотором.
| Транспортное средство амфибийного типа | 2016 |
|
RU2657721C1 |
| ПЕРЕДАТЧИК ДВУКРАТНОЙ ОДНОПОЛОСНОЙ ТЕЛЕФОНИИ ИЛИ ТЕЛЕГРАФИИ | 1940 |
|
SU60477A1 |
| 0 |
|
SU156990A1 | |
| Шнековый движитель | 1978 |
|
SU740591A1 |
| СПОСОБ ПРОИЗВОДСТВА БИОГУМУСА С ПОМОЩЬЮ КРАСНОГО КАЛИФОРНИЙСКОГО ЧЕРВЯ И УСТАНОВКА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2011 |
|
RU2493139C2 |

