Изобретение относится к транспортному машиностроению, в частности к амфибийным транспортно-технологическим средствам специального назначения на роторно-винтовых движителях, обладающих высоким уровнем проходимости на слабых грунтах, льду и открытой воде неограниченной глубины благодаря низкому давлению на грунт и высоким тягово-сцепным свойствам, предназначенным для работы в особых условиях, например на рейдовой разгрузке судов в районах Северного морского пути.
Известны амфибийные транспортно-технологические средства высокой проходимости для перевозки грузов: сочлененное двухзвенное транспортное средство высокой проходимости снегоболотоход на шинах сверхнизкого давления с колесной формулой 16×16 (Патент RU 170878, B60F 3/00, B62D 61/10, 18.07.2016); двухзвенный гусеничный транспортер ДТ-30МН грузоподъемностью 30 тонн (www.bolotohod.ru), с габаритной длиной грузовой платформы 10 м и габаритной шириной - 3,1 м, с возможностью преодоления брода глубиной 1,8 м; большегрузное многозвенное транспортное средство (Патент RU 2630039, B60F 3/00, B62D 57/00, 03.11.2016), содержащее головной тягач с гусеничным движителем и прицепные платформы санного типа, с возможностью преодоления водоемов глубиной до 3 м, прицепные платформы выполнены с возможностью перевозки стандартного грузового контейнера.
Недостатком снегоболотохода 16×16 на шинах сверхнизкого давления с точки зрения транспортировки грузов является невозможность перевозки длинномерных грузов, в частности, стандартных сорокафутовых контейнеров (длиной 12 м), применяемых в качестве тары по международной классификации на Северном морском пути.
Недостатком двухзвенного гусеничного транспортера ДТ-30МН с точки зрения транспортировки грузов является невозможность перевозки стандартных сорокафутовых контейнеров, упомянутых выше, а также невозможность передвижения по открытой глубокой воде.
Ближайшим аналогом к заявляемому транспортному средству по технической сущности является большегрузное многозвенное транспортное средство RU 2630039. Недостатком данного транспортера является невозможность передвижения по открытой воде глубиной более 3 м.
Решаемая задача - возможность транспортировки длинномерных грузов (например, длиной включительно до 12 м, что соответствует длине стандартного сорокафутового контейнера) на рейдовой разгрузке судов в условиях Северного морского пути.
Технический результат - применение двухзвенной амфибийной грузовой платформы на роторно-винтовых движителях с трансформируемыми корпусами понтонного типа.
Технический результат достигается тем, что амфибийная роторно-винтовая платформа, содержащая головное и прицепное звенья, связанные тягово-сцепным устройством с возможностью поворота звеньев относительно друг друга в горизонтальной плоскости, включает центральные понтоны каждого звена, присоединенные к ним четыре боковых понтона и четыре роторно-винтовых движителя с подвеской, что обеспечивает высокую профильную и опорную проходимостью по снегу, льду, шуге и болоту; боковые понтоны снабжены гидромеханическим приводом изменения их положения относительно центрального понтона, а роторно-винтовые движители имеют гидромеханическую подвеску, обеспечивающую различные положения движителей относительно продольной оси машины при разных условиях ее работы или передислокации, например на железнодорожной платформе, а также регулирование дорожного просвета; каждый роторно-винтовой движитель имеет индивидуальный силовой электромеханический или гидромеханический привод, что позволяет регулировать скорости и направления вращения роторов. Центральные и боковые понтоны, а также роторно-винтовые движители при погружении в воду обеспечивают достаточное водоизмещение и плавучесть платформы с грузом независимо от глубины, а роторно-винтовые движители с реверсивным приводом - необходимые водоходные возможности (прямолинейное движение, маневрирование, включая движение боком)
Амфибийная роторно-винтовая платформа, содержащая переднее звено и заднее звено, соединенные тягово-сцепным устройством с возможностью поворота звеньев платформ относительно друг друга в горизонтальной плоскости, имеющая возможность перевозки крупногабаритных неделимых грузов, например, стандартных сорокафутовых контейнеров, содержит носовой и кормовой центральные понтоны, четыре боковых понтона и четыре роторно-винтовых движителя с подвеской, что обеспечивает высокую профильную и опорную проходимостью и плавучесть; боковые понтоны подвижно соединены с центральными понтонами и снабжены гидромеханическим приводом, что обеспечивает возможность регулирования их положения относительно центральных, основные из них - транспортное и рабочее, при этом габаритные размеры платформы в транспортном положение обеспечивают возможность ее перевозки железнодорожным транспортом, а рабочее - размещение на платформе крупногабаритных грузов. Роторно-винтовые движители имеют гидромеханическую регулируемую подвеску, которая обеспечивает изменение колеи и дорожного просвета платформы. Каждый роторно-винтовой движитель снабжен индивидуальным электро- или гидромеханическим силовым приводом с целью регулирования скорости и направления вращения каждого ротора.
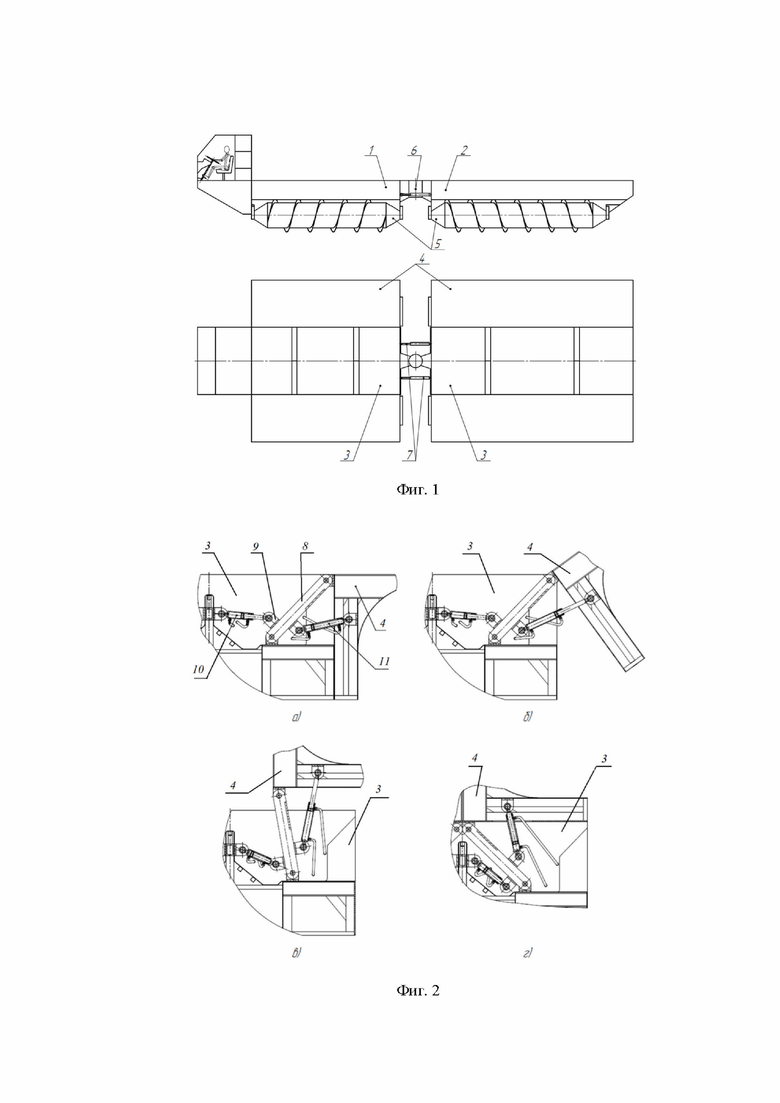
Заявляемая амфибийная роторно-винтовая платформа включает два звена - переднее 1 и заднее 2, два центральных понтона 3, четыре боковых понтона 4 и четыре роторно-винтовых движителя 5 (фиг. 1). Тягово-сцепное устройство 6, соединяющее звенья 1 и 2, имеет одну степень свободы с возможностью поворота звеньев относительно друг друга в горизонтальной плоскости с помощью гидроцилиндров 7.
Привод роторно-винтовых движителей индивидуальный. Внутри каждого ротора 5 предполагается установка электро- или гидромоторов, приводимых в действие энергетической установкой амфибии (на рис. не показаны)
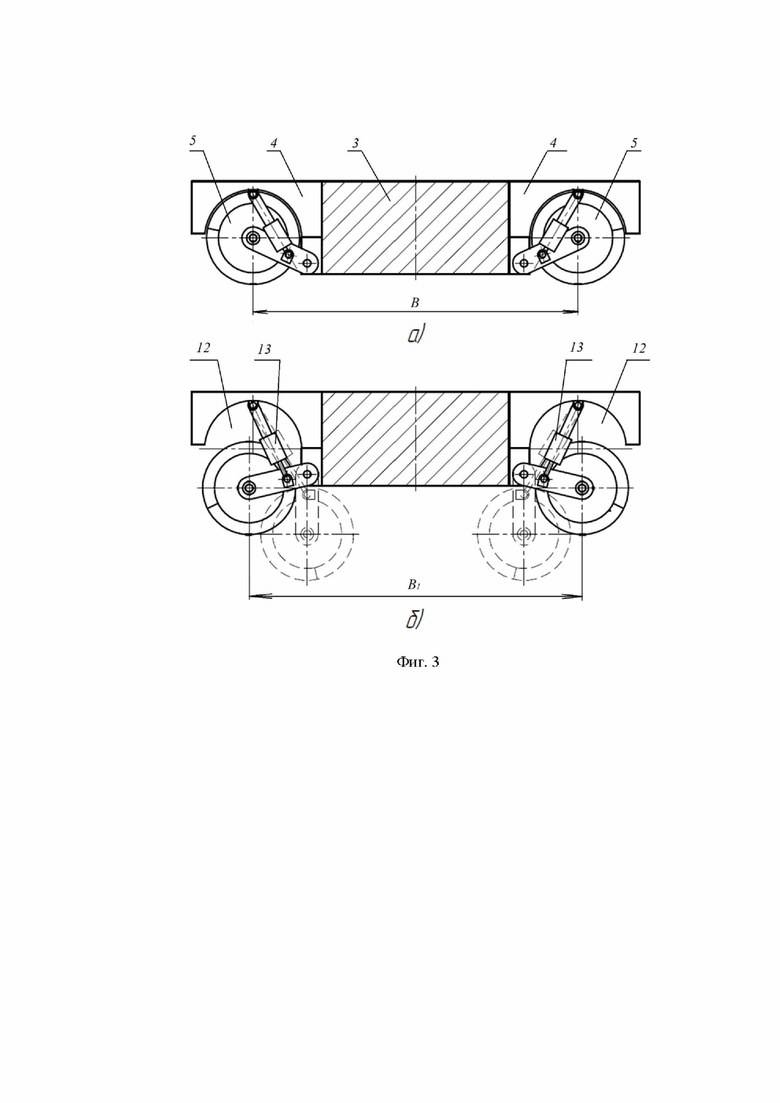
Боковые понтоны 4 предназначены для увеличения грузовой площади платформы и ее водоизмещения на плаву, шарнирно соединены с центральным понтоном 3 с помощью рычагов 8 и снабжены гидромеханическим приводом 9 изменения их положения относительно центрального понтона 3, обеспечивающим четыре положения боковых понтонов: рабочее положение (фиг. 2, а), нижнее переходное ремонтное положение (фиг. 2, б), верхнее положение (фиг. 2, в) и транспортное положение (фиг. 2, г). В рабочем положении боковые понтоны 4 образуют единую погрузочную плоскость с центральным понтоном 3, при этом общая ширина грузовой платформы обеспечивает возможность размещения стандартных двадцатифутовых и сорокафутовых контейнеров. В нижнем переходном ремонтном положении боковые понтоны посредством гидроцилиндров 10 и 11 фиксируются под углом к центральному, что, в случае необходимости, обеспечивает удобство доступа к роторам движителей для технического обслуживания или ремонта. В верхнем положении (фиг. 2, в) боковые понтоны располагаются над центральными с небольшим зазором, что также обеспечивает возможность обслуживания или ремонта узлов платформы. В транспортном положении (фиг. 2, г) боковые понтоны 4 укладываются на центральный понтон 3, что позволяет уменьшить габаритную ширину каждого звена платформы в соответствии с требованиями железнодорожного габарита и обеспечить возможность перевозки железнодорожным транспортом. Кроме того, боковые понтоны 4 имеют тоннели 12 цилиндрической формы, расположенные со стороны, обращенной к роторно-винтовым движителям, параллельно им.
Подвеска роторов движителей (фиг. 3) обеспечивает возможность регулировки их положения относительно боковых понтонов. При движении на плаву роторы 5 располагаются в тоннелях 12 боковых понтонов 4 (фиг. 3), что повышает тяговые возможности движителей и остойчивость амфибии. При движении по суше и погрузке на железнодорожную платформу колея (расстояние между осями роторов обоих бортов) уменьшается с помощью гидромеханического привода 13 до минимального размера B1 (фиг. 3, б), т.е. B1 .
.
Амфибийная роторно-винтовая платформа, содержащая переднее звено и заднее звено, соединенные тягово-сцепным устройством с возможностью поворота звеньев платформ относительно друг друга в горизонтальной плоскости, имеющая возможность перевозки крупногабаритных неделимых грузов, например, стандартных сорокафутовых контейнеров, содержит носовой и кормовой центральные понтоны, четыре боковых понтона и четыре роторно-винтовых движителя с подвеской, что обеспечивает высокую профильную и опорную проходимостью и плавучесть; боковые понтоны подвижно соединены с центральными понтонами и снабжены гидромеханическим приводом, что обеспечивает возможность регулирования их положения относительно центральных, основные из них - транспортное и рабочее, при этом габаритные размеры платформы в транспортном положение обеспечивают возможность ее перевозки железнодорожным транспортом, а рабочее - размещение на платформе крупногабаритных грузов. Роторно-винтовые движители имеют гидромеханическую регулируемую подвеску, которая обеспечивает изменение колеи и дорожного просвета платформы. Каждый роторно-винтовой движитель снабжен индивидуальным электро- или гидромеханическим силовым приводом с целью регулирования скорости и направления вращения каждого ротора.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОПРИЦЕП - АМФИБИЙНЫЙ ПАРОМ | 2007 |
|
RU2339537C1 |
| Многоцелевой подводный аппарат | 2023 |
|
RU2806880C1 |
| САМОХОДНАЯ АМФИБИЙНАЯ ПЛАТФОРМА НА ВОЗДУШНОЙ ПОДУШКЕ | 2007 |
|
RU2345916C1 |
| Двухзвенное гусеничное транспортное средство для перевозки длинномерных грузов | 2021 |
|
RU2765311C1 |
| ПЛАВАЮЩИЙ ТРАНСПОРТЕР | 2011 |
|
RU2475371C2 |
| ОСОБО БОЛЬШЕГРУЗНОЕ МНОГОЗВЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО ВЫСОКОЙ ПРОХОДИМОСТИ ЛЕДОВОГО И ВОДНОГО ХОДА | 2000 |
|
RU2174470C1 |
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА С ПОВЫШЕННОЙ ПРОХОДИМОСТЬЮ НА СЛАБЫХ ГРУНТАХ | 2016 |
|
RU2653407C1 |
| Модуль колёсно-гусеничного движителя и шасси с двумя модулями | 2022 |
|
RU2784225C1 |
| Самоходный паром | 1988 |
|
SU1508622A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2022 |
|
RU2786744C1 |
Изобретение относится к транспортному машиностроению, в частности к амфибийным транспортно-технологическим средствам специального назначения на роторно-винтовых движителях, обладающих высоким уровнем проходимости на слабых грунтах, льду и открытой воде неограниченной глубины благодаря низкому давлению на грунт и высоким тягово-сцепным свойствам и предназначенным для работы в особых условиях, например на рейдовой разгрузке судов в районах Северного морского пути. Амфибийная роторно-винтовая платформа содержит головное и прицепное звенья, связанные тягово-сцепным устройством с возможностью поворота звеньев относительно друг друга в горизонтальной плоскости, включает центральные понтоны каждого звена, присоединенные к ним четыре боковых понтона и четыре роторно-винтовых движителя с подвеской, что обеспечивает высокую профильную и опорную проходимость по снегу, льду, шуге и болоту; боковые понтоны снабжены гидромеханическим приводом изменения их положения относительно центрального понтона, а роторно-винтовые движители имеют гидромеханическую подвеску, обеспечивающую различные положения движителей относительно продольной оси машины при разных условиях ее работы или передислокации, например на железнодорожной платформе, а также регулирование дорожного просвета; каждый роторно-винтовой движитель имеет индивидуальный силовой электромеханический или гидромеханический привод, что позволяет регулировать скорости и направления вращения роторов. Центральные и боковые понтоны, а также роторно-винтовые движители при погружении в воду обеспечивают достаточное водоизмещение и плавучесть платформы с грузом независимо от глубины, а роторно-винтовые движители с реверсивным приводом - необходимые водоходные возможности (прямолинейное движение, маневрирование, включая движение боком). 3 ил.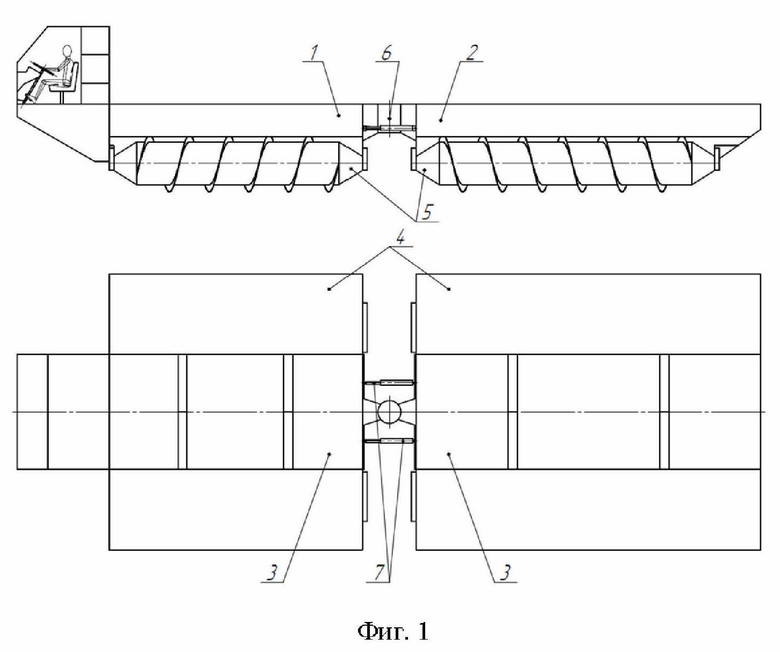
Амфибийная роторно-винтовая платформа, содержащая головное звено и прицепное звено, связанные тягово-сцепным устройством с возможностью поворота звеньев относительно друг друга в горизонтальной плоскости, и роторно-винтовые движители, имеющая возможность перевозки грузовых контейнеров, отличающаяся тем, что каждое звено включает центральный понтон, присоединенные к нему подвижно по бортам боковые понтоны, что обеспечивает два положения боковых понтонов относительно центральных: транспортное и рабочее, при этом в рабочем положении боковые понтоны располагаются в одной плоскости с центральными понтонами, а габаритные размеры платформы в транспортном положении обеспечивают возможность перевозки амфибии железнодорожным транспортом, боковые понтоны, шарнирно соединенные с центральным понтоном, снабжены гидромеханическим приводом изменения их положения относительно центрального понтона и имеют тоннели размещения движителей на плаву, подвеска роторно-винтовых движителей выполнена так, что обеспечивает регулирование колеи и дорожного просвета платформы и их положение относительно боковых понтонов: положение на воде, когда роторы движителей располагаются непосредственно в тоннелях боковых понтонов, и положение на суше с регулируемым дорожным просветом, а каждый роторно-винтовой движитель имеет индивидуальный реверсивный привод.
| Транспортное средство амфибийного типа | 2016 |
|
RU2657721C1 |
| БОЛЬШЕГРУЗНОЕ МНОГОЗВЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2630039C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ВЫСОКОЙ ПРОХОДИМОСТИ | 2000 |
|
RU2188132C2 |
| ОСОБО БОЛЬШЕГРУЗНОЕ МНОГОЗВЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО ВЫСОКОЙ ПРОХОДИМОСТИ ЛЕДОВОГО И ВОДНОГО ХОДА | 2000 |
|
RU2174470C1 |
| EP 2864139 A1, 29.04.2015 | |||
| DE 20307770 U1, 24.07.2003 | |||
| US 3333563 A, 01.08.1967. | |||
