Область техники, к которой относится изобретение
Настоящее изобретение относится к регулировке подвижных систем рентгеновской визуализации, и в частности, относится к подвижной системе рентгеновской визуализации для выравнивания исследуемого объекта и установки для рентгеновской визуализации относительно друг друга, к способу выравнивания в рентгеновской визуализации, а также к компьютерному программному элементу и к машиночитаемому носителю.
Уровень техники
В подвижных системах рентгеновской визуализации, например в системах с подвижной C-дугой, позиционирование важно для получения изображения оптимального качества, а также для простоты использования. Например, во время операций или интервенционных исследований система рентгеновской визуализации может по меньшей мере частично перемещаться для различных целей. Например, получают рентгеноскопическое изображение, после чего систему рентгеновской визуализации перемещают в другое положение, чтобы обеспечить свободное пространство для операции. Система рентгеновской визуализации также может быть перемещена в другое положение для получения других изображений с других направлений. После или во время операции дополнительно может возникнуть необходимость получить дополнительное изображение той же исследуемой области, предпочтительно по меньшей мере с того же положения обзора. Следовательно, подвижная система рентгеновской визуализации будет вновь перемещена в первоначальное положение. Например, это может происходить множество раз во время особенно долгих операций. Чтобы иметь возможность достичь того же или по меньшей мере близкого положения, используется внешнее отслеживание положения, описанное, например, в патенте США № 7,766,548. Тем не менее, было показано, что использование внешних устройств отслеживания положения приводит к дополнительным затратам на оборудование и к нагромождению оборудования в помещении для исследований, а иногда даже накладывает ограничения на пропускную способность. Помимо этого используются также интегрированные датчики. Однако использование интегрированных датчиков также означает дополнительные затраты и требует участия оператора и наличия навыков выравнивания и позиционирования.
Раскрытие изобретения
Таким образом, существует необходимость обеспечить упрощенное выравнивание и позиционирование подвижной системы рентгеновской визуализации, одновременно снизив требования к оборудованию, чтобы работа на нем была интуитивно понятной.
Задача настоящего изобретения решается объектами изобретения согласно независимым пунктам формулы изобретения, тогда как дополнительные варианты осуществления охарактеризованы в зависимых пунктах формулы изобретения.
Следует отметить, что описанные ниже аспекты изобретения также применимы к подвижной системе рентгеновской визуализации для выравнивания исследуемого объекта и установки для рентгеновской визуализации относительно друг друга, к способу выравнивания в рентгеновской визуализации, а также к компьютерному программному элементу и к машиночитаемому носителю.
Согласно первому аспекту настоящего изобретения предусмотрена подвижная система рентгеновской визуализации для выравнивания исследуемого объекта и установки для рентгеновской визуализации относительно друг друга, содержащая установку для рентгеновской визуализации с источником рентгеновского излучения и детектором рентгеновского излучения, по меньшей мере одну камеру, процессор данных и дисплей. По меньшей мере одна камера либо прикреплена к установке для рентгеновской визуализации, либо может быть прикреплена к исследуемому объекту. По меньшей мере одна камера дополнительно выполнена с возможностью получения первого изображения по меньшей мере одной опорной точки. Процессор данных выполнен с возможностью соотнесения первого изображения с первыми параметрами проекции первого рентгеновского изображения исследуемого объекта относительно объекта. Параметры проекции относятся к различным степеням свободы и содержат по меньшей мере одно из группы, состоящей из пространственных положений проекции, расстояния до объекта, направления обзора, или угла проекции, и поля обзора. Для получения по меньшей мере одного дополнительного рентгеновского изображения в проекции, совпадающей первыми угловыми параметрами проекции первого рентгеновского изображения, дисплей выполнен с возможностью отображения по меньшей мере графического представления по меньшей мере одной опорной точки на первом изображении, по меньшей мере частично наложенном на фактическое изображение, полученное по меньшей мере одной камерой, для управления выравнивающим перемещением источника рентгеновского излучения и/или детектора рентгеновского излучения и объекта относительно друг друга после промежуточного смещения.
В одном примере параметры проекции содержат направление обзора, допускающее поступательное перемещение вдоль оси проекции и перпендикулярно к ней. В другом примере параметры проекции содержат положение обзора, позволяющее осуществлять поворот вокруг точки в пространстве. В другом примере параметры проекции могут содержать пять степеней свободы, причем поворот вокруг направления обзора может осуществляться вручную или управляться пользователем. В другом примере шесть степеней свободы, три поступательные и три вращательные, составляют параметры проекции.
Графическое представление отображается в том же геометрическом отношении ко второму изображению, что и по меньшей мере одна опорная точка в первом изображении. Другими словами, графическое представление отображается в том же геометрическом отношении к области отображения дисплея.
Графическое представление представляет собой опорное изображение, сохраненное для совместного отображения с вторым изображением. Опорным изображением может являться само первое изображение, показывающее по меньшей мере одну опорную точку.
Отображение опорной точки или опорного изображения наглядно показывает различие между положением мишени и фактическим положением, объединяя отображение опорной точки, или опорного изображения, с вторым изображением. Таким образом, предусмотрен легко воспроизводимый способ точного позиционирования источника рентгеновского излучения, например, позиционирования штатива типа С-дуга.
Система, таким образом, содержит две подвижные части, которые необходимо (повторно) выровнять после перемещения, а именно установку для рентгеновской визуализации и исследуемый объект. По меньшей мере одна камера системы интегрирована таким образом, что она может перемещаться как вместе с исследуемым объектом, так и вместе с установкой для рентгеновской визуализации. Для выравнивания камера обеспечивает фактическое изображение по меньшей мере одной опорной точки, которая также видна на наложенном изображении или на комбинированном изображении. Во время выравнивания камера перемещается относительно другой части, то есть происходит относительное перемещение камеры.
Может быть предусмотрена опорная конструкция, выполненная с возможностью обеспечения относительного перемещения исследуемого объекта, источника рентгеновского излучения и/или детектора рентгеновского излучения.
Согласно примерному варианту осуществления изобретения дисплей выполнен с возможностью отображения графического представления a) в форме по меньшей мере одного устанавливаемого вручную маркера, причем дисплей выполнен с возможностью отображения по меньшей мере одного маркера, по меньшей мере частично наложенного на фактическое изображение, и/или b) в форме собственно первого изображения, причем дисплей выполнен с возможностью отображения первого изображения, по меньшей мере частично наложенного на фактическое изображение.
Графическое представление может быть вручную нанесенными контуром или отметкой, сделанными на отображаемом первом изображении, например, непосредственно на экране. Нанесенный вручную графический элемент может храниться отдельно, чтобы его можно было показать наложенным на второе изображение.
Согласно примерному варианту осуществления изобретения по меньшей мере одна камера остается в известном пространственном отношении к источнику рентгеновского излучения и/или к детектору рентгеновского излучения и по меньшей мере одна опорная точка остается в постоянном пространственном отношении к исследуемому объекту по меньшей мере во время относительного перемещения.
Согласно альтернативному примерному варианту осуществления изобретения по меньшей мере одна камера временно устанавливается неподвижно относительно исследуемого объекта и по меньшей мере одна опорная точка остается в известном пространственном отношении к источнику рентгеновского излучения и/или к детектору рентгеновского излучения во время относительного перемещения.
Например, в первом случае по меньшей мере одна камера устанавливается неподвижно относительно источника рентгеновского излучения и/или детектора рентгеновского излучения. Во втором случае, например, по меньшей мере одна опорная точка остается в постоянном пространственном отношении к источнику рентгеновского излучения и/или к детектору рентгеновского излучения во время относительного перемещения.
Подвижная система рентгеновской визуализации может быть выполнена в виде позиционируемого устройства рентгеновской визуализации. Подвижная система рентгеновской визуализации представляет собой мобильную рентгеновскую систему с подвижной опорной конструкцией, прикрепленной к мобильному стенду в одном примере. Опорная конструкция может быть конструкцией со штативом типа С-дуга.
Например, альтернативно или дополнительно, опорная конструкция содержит опору объекта, выполненную с возможностью перемещения объекта относительно источника рентгеновского излучения и/или детектора рентгеновского излучения. Таким образом, система, содержащая установку для рентгеновской визуализации, может быть перемещена; или, дополнительно или альтернативно, перемещен может быть объект. В любом случае происходит относительное перемещение.
Согласно примерному варианту осуществления изобретения для получения дополнительных рентгеновских изображений, в первом приближении, опорная конструкция может быть перемещена так, что источник рентгеновского излучения и/или детектор рентгеновского излучения находятся внутри заданного диапазона положений первой проекции. Опорная конструкция может содержать по меньшей мере один подвижный узел с детектируемыми положениями узла и является подвижной в заданном диапазоне совпадающих положений узла во втором приближении. Дисплей может быть выполнен с возможностью отображения по меньшей мере графического представления опорной точки на первом изображении, наложенном на фактическое изображение, для выравнивания в третьем приближении.
Первое приближение является грубым приближением, второе приближение является средним приближением, и третье приближение является точным приближением.
Например, первое изображение показано наложенным на второе изображение полупрозрачным образом.
Согласно примерному варианту осуществления изобретения даются по меньшей мере две опорные точки, или по меньшей мере три опорные точки, или более трех опорных точек.
Например, одной опорной точки достаточно для репозиционирования, относящегося к поступательному перемещению, связанному с полем зрения камеры. Далее, вторая опорная точка требуется, если нужно также определить и выровнять ориентацию или расстояние до объекта. Третья опорная точка позволяет осуществить наклон (или дисторсию) плоскости изображения опорных точек.
Согласно примерному варианту осуществления изобретения предусмотрена по меньшей мере одна опорная точка на исследуемом объекте. Дополнительная по меньшей мере одна опорная точка может быть также предусмотрена на опорном поле, имеющемся в помещении для исследований.
Например, одна или более опорных точек могут иметь вид индикаторов на поверхности объекта.
Согласно примерному варианту осуществления изобретения по меньшей мере одна опорная точка имеет вид лазерной проекции.
Лазерная проекция может содержать более двух опорных точек, например три или четыре точки. Лазерная проекция может содержать проекцию в виде рамки.
Графическое представление может быть наносимым вручную контуром лазерной проекции, который сохраняется как часть опорного изображения.
Камера может быть видеокамерой, получающей изображения в видимом световом диапазоне. Камера может также быть инфракрасной камерой, получающей инфракрасные изображения, которые переводятся в видимые изображения.
Может быть предусмотрено множество камер в разных местах для получения множества первых изображений и множества фактических изображений, объединенных, например, попарно.
В качестве оборудования для получения изображения предусмотрен источник рентгеновского излучения и детектор рентгеновского излучения, которые могут позиционироваться относительно объекта для получения изображения объекта с разных направлений.
Согласно примерному варианту осуществления изобретения для выравнивающего перемещения источник рентгеновского излучения и/или детектор рентгеновского излучения являются подвижными относительно объекта по меньшей мере в двух направлениях перемещения. На источнике рентгеновского излучения и/или на детекторе рентгеновского излучения предусмотрены видимые пользователю индикаторы первого направления перемещения для обозначения возможных направлений перемещения относительно объекта. На дисплее предусмотрены индикаторы второго направления перемещения относительно отображаемого изображения объекта для обозначения возможных направлений перемещения оборудования для получения изображения относительно объекта.
Согласно примерному варианту осуществления изобретения даются индикаторы первого направления перемещения для плоскости перемещения, причем индикаторы первого направления перемещения даются в виде обозначений для ориентации на плоскости, содержащих одно из группы, состоящей из a) положения стрелок часов, b) направлений по сторонам света и c) цветов хроматического круга.
Согласно второму аспекту предусмотрен способ выравнивания устройства для рентгеновской визуализации, содержащий следующие этапы:
a) получение первого изображения по меньшей мере одной опорной точки по меньшей мере одной камерой;
b) получение первого рентгеновского изображения исследуемого объекта с первыми параметрами проекции относительно объекта; причем параметры проекции относятся к различным степеням свободы и содержат по меньшей мере одно из группы, содержащей пространственное положение проекции, расстояние до объекта, направление обзора, или угол проекции, и поле обзора;
c) соотнесение первого изображения с первыми параметрами проекции первого рентгеновского изображения относительно объекта;
d) получение фактического изображения по меньшей мере одной камерой;
e) отображение по меньшей мере графического представления по меньшей мере одной опорной точки на первом изображении, по меньшей мере частично наложенном на фактическое изображение, для управления выравнивающим перемещением источника рентгеновского излучения и/или детектора рентгеновского излучения и объекта относительно друг друга после промежуточного смещения;
f) выравнивающее перемещение источника рентгеновского излучения и/или детектора рентгеновского излучения и объекта относительно друг друга для получения по меньшей мере одного дополнительного рентгеновского изображения в проекции, совпадающей с первыми параметрами проекции первого рентгеновского изображения, после промежуточного смещения, на основе отображаемых наложенных изображений.
Либо i) по меньшей мере одна камера устанавливается неподвижно относительно источника рентгеновского излучения и/или детектора рентгеновского излучения, и по меньшей мере одна опорная точка остается в постоянном пространственном отношении к исследуемому объекту по меньшей мере во время относительного перемещения; либо ii) по меньшей мере одна камера временно устанавливается неподвижно относительно исследуемого объекта, и по меньшей мере одна опорная точка остается в постоянном пространственном отношении к источнику рентгеновского излучения и/или к детектору рентгеновского излучения во время относительного перемещения.
Например, графическое представление является собственно первым изображением, и первое изображение накладывается способом, отличным от фактического изображения, на этапе e). Например, первое изображение имеет вид черно-белого изображения, наложенного на цветное фактическое изображение. Например, фактическое изображение отображается наложенным на первое изображение по меньшей мере последовательно в первом и втором масштабе, обеспечивая возрастание коэффициента усиления для улучшения приближения выравнивания.
Согласно одному аспекту настоящего изобретения изображение с различимыми признаками получают с того же положения, с которого получают первое рентгеновское изображение. Поскольку или опорные точки на изображении, или камера перемещаются вместе с перемещением системы рентгеновской визуализации относительно объекта, положение первого рентгеновского изображения может быть определено нахождением такого положения, в котором может быть получено такое же или похожее изображение. Таким образом, отображая первое изображение, или по меньшей мере некоторые основные и легко воспроизводимые структуры, показанные на первом изображении, можно обеспечить визуальную ориентацию для выравнивания системы рентгеновской визуализации, обеспечивая интуитивно понятную и легко воспроизводимую обратную связь о том, куда следует переместить систему рентгеновской визуализации для надлежащего выравнивания. Таким образом, вместо вычисления каких-либо векторов или поочередного выравнивания выравнивание основано только на визуальном определении любые заранее известных структур, остающихся более или менее постоянными. Например, ими могут быть соседняя область или непосредственное окружение операционного поля, а также изображение может содержать признаки, которые могут служить опорными точками. Например, в случае непрерывных и более длительных интервенционных процедур опорными точками могут служить фиксируемые хирургические инструменты, такие как зажимы и скобы, удерживающие операционное поле открытым. Благодаря тому, что обеспечивается одновременно и первое, и фактическое изображения, то есть второе изображение, становится возможным прямое взаимодействие с пользователем, что обеспечивает надежный и облегченный и поэтому достаточно быстрый способ выравнивания системы рентгеновской визуализации. В частности, следует отметить, что дисплей для отображения второго изображения и опорной точки первого изображения обычно так или иначе доступен, так же как и видеокамера. Тем не менее, что касается камеры, можно использовать и довольно простые и потому дешевые камеры, которые могут прикрепляться, например, к корпусу детектора. Кроме того, в системе рентгеновской визуализации также обычно под рукой имеется процессор данных с запоминающим устройством. Другими словами, система и способ согласно настоящему изобретению основываются большей частью на оборудовании, имеющемся в установке для рентгеновской визуализации и не включающем каких-либо сложных этапов обработки изображения.
Следует отметить, что примеры описываются со ссылками на разные объекты изобретения. Некоторые описываемые примеры относятся к системе, и некоторые описываемые примеры относятся к способу. Однако специалисты в данной области техники поймут, что, помимо любой комбинации признаков, принадлежащих одному типу объекта изобретения, также даются любые комбинации признаков, относящихся к разным объектам изобретения.
Эти и другие аспекты настоящего изобретения станут понятны и будут объяснены с обращением к вариантам осуществления, описанным ниже.
Краткое описание чертежей
Примерные варианты осуществления изобретения будут описаны далее со ссылкой на следующие чертежи.
Фиг. 1 показывает схематическое устройство подвижной системы рентгеновской визуализации в первом примере на Фиг. 1A и во втором примере на Фиг. 1B.
Фиг. 2 показывает на Фиг. 2A первое приближение установки для рентгеновской визуализации и объекта, и второе приближение на Фиг. 2B, и третье приближение на Фиг. 2C.
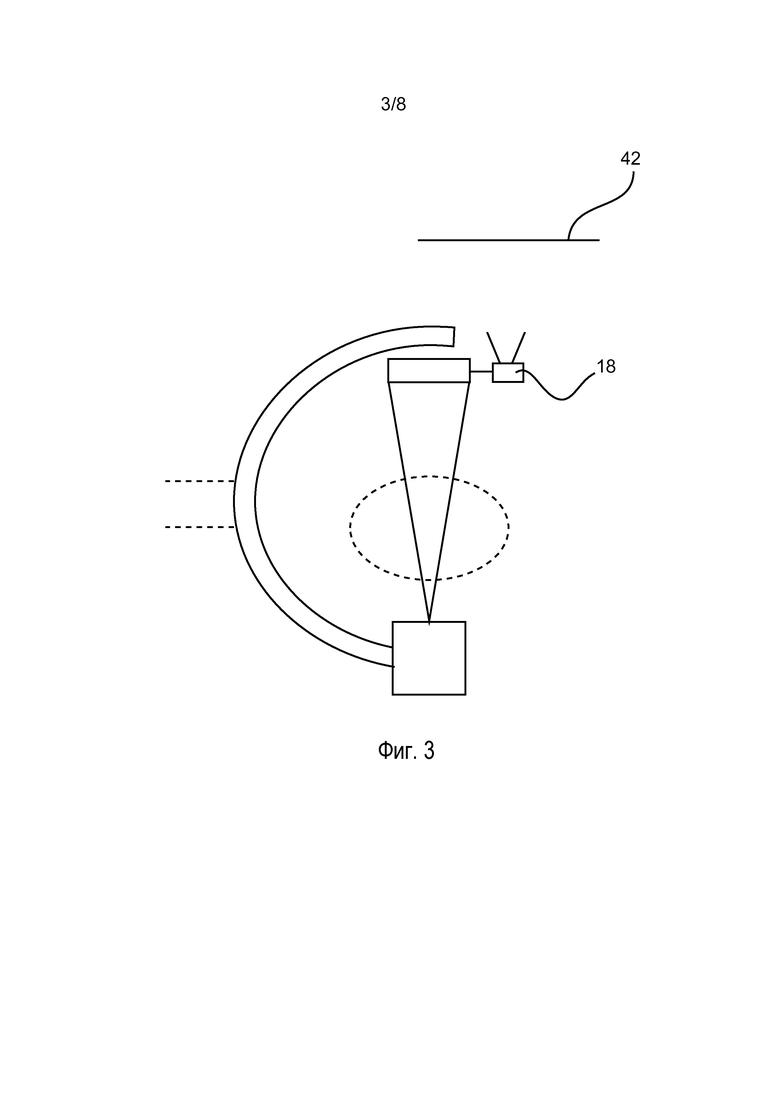
Фиг. 3 показывает дополнительный пример подвижной системы рентгеновской визуализации.
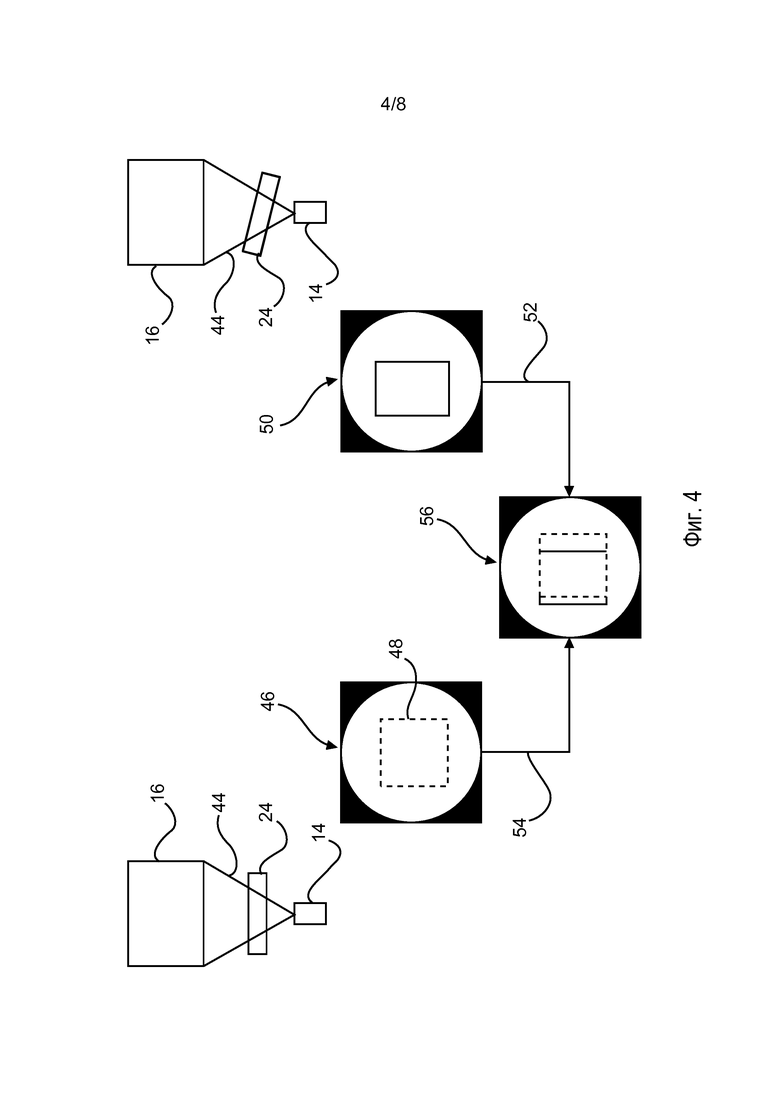
Фиг. 4 схематически показывает дополнительные примеры подвижной системы рентгеновской визуализации.
Фиг. 5 показывает изображения на дисплее в еще одном дополнительном примере подвижной системы рентгеновской визуализации.
Фиг. 6 показывает дополнительный пример изображений на дисплее.
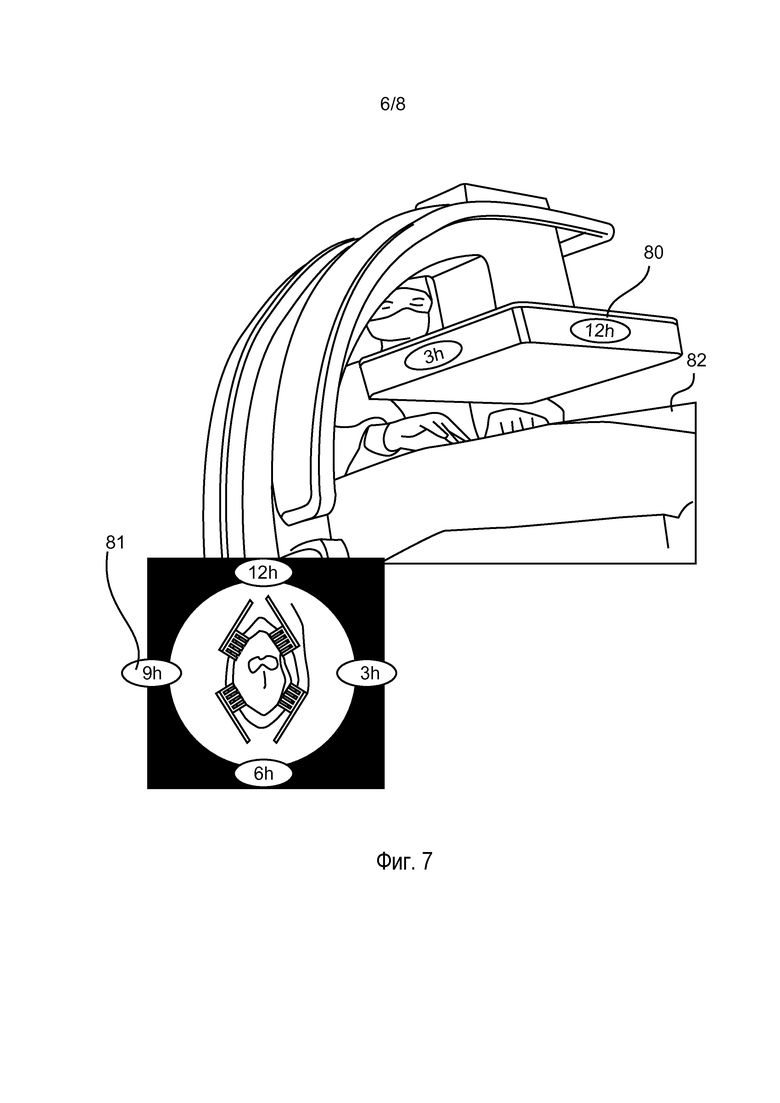
Фиг. 7 показывает дополнительный пример подвижной системы рентгеновской визуализации, содержащей указатели направления перемещения.
Фиг. 8 показывает дополнительный пример подвижной системы рентгеновской визуализации относительно другого оборудования в помещении для исследований; и
Фиг. 9 показывает основные этапы примерного способа.
Осуществление изобретения
Фиг. 1 показывает подвижную систему 10 рентгеновской визуализации для выравнивания исследуемого объекта и установки для рентгеновской визуализации относительно друг друга. Система содержит установку 12 для рентгеновской визуализации с источником 14 рентгеновского излучения и с детектором 16 рентгеновского излучения. Далее, имеется по меньшей мере одна камера 18, а также процессор 20 данных и дисплей 22. На Фиг. 1A камера 18 прикреплена к установке для рентгеновской визуализации. На Фиг. 1B одни и те же ссылочные позиции используются для одних и тех же признаков подвижной системы 10 рентгеновской визуализации. На Фиг. 1B по меньшей мере одна камера 18 может прикрепляться к исследуемому объекту 24.
Со ссылкой на оба примера, по меньшей мере одна камера 18 способна получать первое изображение по меньшей мере одной опорной точки. Процессор 20 данных выполнен с возможностью соотнесения первого изображения с первыми параметрами проекции первого рентгеновского изображения исследуемого объекта относительно объекта. Параметры проекции относятся к различным степеням свободы и содержат по меньшей мере одно из группы, состоящей из пространственного положения проекции, расстояния до объекта, направление обзора, или угла проекции, и поля обзора.
Для получения по меньшей мере одного дополнительного рентгеновского изображения в проекции, совпадающей с первыми параметрами проекции первого рентгеновского изображения, дисплей 22 выполнен с возможностью отображения по меньшей мере графического представления по меньшей мере одной опорной точки в первом изображении, по меньшей мере частично наложенном на фактическое изображение, полученное по меньшей мере одной камерой 18, для управления выравнивающим перемещением источника рентгеновского излучения и/или детектора рентгеновского излучения и объекта относительно друг друга после промежуточного смещения.
Двойная стрелка 26 схематически показывает относительное перемещение установки 12 для рентгеновской визуализации и объекта 24.
Например, установка для рентгеновской визуализации является подвижной, тогда как объект остается закрепленным, по меньшей мере временно закрепленным, например, на столе пациента.
Согласно дополнительному примеру, именно исследуемый объект находится на подвижной опоре, обеспечивающей относительное перемещение, тогда как установка для рентгеновской визуализации с источником рентгеновского излучения и детектором рентгеновского излучения остается неподвижной.
Например, источник 14 рентгеновского излучения и детектор 16 рентгеновского излучения устанавливаются на штатив 28 типа С-дуга, причем штатив типа С-дуга может находиться на подвижной основе.
Дисплей 22 выполнен с возможностью отображения графического представления, например, в форме по меньшей мере одного устанавливаемого вручную маркера, причем дисплей выполнен с возможностью отображения по меньшей мере одного маркера, по меньшей мере частично наложенного на фактическое изображение.
В другом примере дисплей выполнен с возможностью отображения графического представления в форме собственно первого изображения, причем дисплей выполнен с возможностью отображения первого изображения, по меньшей мере частично наложенного на фактическое изображение.
Графическое представление может быть вручную нанесенным контуром или отметкой, сделанными на отображаемом первом изображении. Нанесенный вручную графический элемент можно отдельно сохранить, чтобы наложить его на второе изображение.
В примере с Фиг. 1A по меньшей мере одна камера 18 остается в известном пространственном отношении к источнику рентгеновского излучения и/или к детектору рентгеновского излучения. По меньшей мере одна опорная точка остается в постоянном пространственном отношении к исследуемому объекту по меньшей мере во время относительного перемещения. Например, по меньшей мере одна опорная точка расположена на поверхности объекта.
В примере с Фиг. 1B по меньшей мере одна камера временно устанавливается неподвижно относительно исследуемого объекта и по меньшей мере одна опорная точка остается в известном пространственном отношении к источнику рентгеновского излучения и/или к детектору рентгеновского излучения во время относительного перемещения.
В случае моторизированной C-дуги также можно обеспечить по меньшей мере одну камеру, неподвижную при перемещении С-дуги и, следовательно, источника рентгеновского излучения и детектора рентгеновского излучения с известными параметрами, что позволяет определить точное положение по меньшей мере одной камеры относительно источника рентгеновского излучения и детектора рентгеновского излучения, поскольку их перемещение в пространстве известно.
Подвижная система рентгеновской визуализации может быть выполнена в виде позиционного устройства получения рентгеновских изображений, например, в виде мобильной рентгеновской системы с подвижной опорной конструкцией 30, прикрепленной к подвижной стойке 32, как показано на Фиг. 2A-2C.
Согласно дополнительному примеру предусмотрена опора 34 объекта, которая может быть выполнена с возможностью оставаться постоянной, то есть оставаться неподвижной, во время процедуры, или может быть выполнена с возможностью перемещения объекта, например пациента, относительно источника рентгеновского излучения и/или детектора рентгеновского излучения.
Для выравнивающего перемещения источника 14 рентгеновского излучения и детектора 16 рентгеновского излучения относительно объекта 24, дисплей 22 может быть выполнен с возможностью отображения фактического изображения, наложенного на по меньшей мере одно графическое представление по меньшей мере одной опорной точки на первом изображении по меньшей мере последовательно в первом и втором масштабе, обеспечивая возрастание коэффициента усиления для того, чтобы улучшить приближение выравнивания.
Например, камера снабжена широкоугольным объективом для получения изображения в области вокруг опорной точки. Кроме того, камера также может быть оснащена источником света для получения изображений в темноте.
Таким образом, приближение можно улучшить, что также описано со ссылками на Фиг. от 2A до 2C.
В первом приближении, показанном на Фиг. 2A, опорная конструкция 30 вместе с подвижной стойкой 32 могут перемещаться так, что источник 14 рентгеновского излучения и/или детектор 16 рентгеновского излучения остаются внутри заданного диапазона положений первой проекции. Например, на Фиг. 2A подвижная стойка 32 перемещается к свету, что показано стрелкой 36, чтобы привести установку для рентгеновской визуализации в положение, приблизительно равное первому положению, в котором перед этим было получено первое рентгеновское изображение. Результат первого приближения показан на Фиг. 2B. Опорная конструкция 30 может содержать по меньшей мере один подвижный узел 38, например прикрепление штатива типа C-дуга в виде скользящего башмака, с определяемыми положениями узла, определяемыми по шкале 40, и причем опорная конструкция является подвижной в заданном диапазоне совпадающих положений узла во втором приближении (дополнительно не показано). В третьем приближении, показанном на Фиг. 2C, дисплей выполнен с возможностью отображения по меньшей мере графического представления опорной точки на первом изображении, наложенном на фактическое изображение, для выравнивания в третьем приближении (дополнительно не показано).
Согласно дополнительному примеру, хотя и не показанному дополнительно, имеется по меньшей мере две опорные точки, и в дополнительном примере имеется по меньшей мере три опорные точки, и в еще одном дополнительном примере имеется даже более трех опорных точек (не показаны дополнительно).
Согласно данному примеру, по меньшей мере одна опорная точка находится на исследуемом объекте, например, одна или более опорные точки имеют вид индикаторов на поверхности объекта.
Тем не менее, со ссылкой на Фиг. 3, по меньшей мере одна опорная точка может также находиться на опорном поле 42, имеющемся в помещении для исследований, например, опорное поле может быть нанесено на поверхность потолка. Таким образом, опорное поле 42 может быть снято по меньшей мере одной камерой 18, обеспечивая информацию о правильности или неправильности выравнивания.
Как показано на Фиг. 4, по меньшей мере одна опорная точка может быть дана в виде лазерной проекции 44, например такой, как используемая для обозначения возможного рентгеновского поля, образованного источником 14 рентгеновского излучения и обнаруженного детектором 16 рентгеновского излучения. На Фиг. 4 объект 24 обозначен прямоугольником. Далее, следует отметить, что устройство для создания лазерной проекции 44 не показано дополнительно. Лазерная проекция может содержать более двух опорных точек, например три или четыре точки, например, в случае проекции в виде рамки.
Как показано далее на Фиг. 4, случай получения первого рентгеновского изображения показан в левом верхнем углу, а соответствующий дисплей показан в виде схемы 46 дисплея. Как показывает прямоугольная структура 48, лазерная проекция в форме рамки обводится вручную, обеспечивая графическое представление.
Чтобы выравнивание источника 14 рентгеновского излучения и детектора 16 рентгеновского излучения относительно объекта 24 соответствовало позиционированию получения первого рентгеновского изображения, например, для получения дополнительного рентгеновского изображения, камера (не показана дополнительно) обеспечивает изображение фактической ситуации, что показывает схема 50 дополнительного изображения на правом верхнем участке Фиг. 4, схема фактической ситуации показана в правом верхнем углу Фиг. 4.
Получая схему 50 фактического изображения, что обозначено стрелкой 52, и получая также вручную нанесенный контур 48, показанный второй стрелкой 54, можно получить схему 56 наложенного изображения, показывающую относительное смещение, которое все еще требует дополнительного выравнивания, а именно корректировки наклона объекта 24.
Фиг. 5 показывает дополнительную схему выравнивающего перемещения. Изображение 58 показывает зажимы 60, удерживающие открытым операционное поле 62. В качестве вручную наносимого контура предусмотрена наносимая вручную метка 64, а также угловое выравнивание зажимов 60, показанное центральными линиями 66. Эти наносимые вручную контуры могут использоваться далее, например, в качестве опорных точек при дальнейшей настройке 68 изображения, являющейся комбинацией изображения 58 с фактическим изображением 70, выполненной с возможностью объединения настройки 68 изображения, что показано первой стрелкой 72 и второй стрелкой 74, причем последняя показывает создание наносимых вручную контуров структур.
Следующий пример показан на Фиг. 6, где первое изображение 74 показано в левом верхнем углу, и второе изображение, то есть фактическое изображение 76, показано в правом верхнем углу. На следующем этапе два изображения объединяются наложением 78, например, для точного позиционирования C-дуги.
Согласно дополнительному примеру (не показан дополнительно) даются датчики для определения относительного перемещения, которое нельзя определить с помощью камеры.
Например, камера является видеокамерой для получения изображений в видимом диапазоне.
Фиг. 7 показывает дополнительный пример, в котором, для выравнивающего перемещения, источник рентгеновского излучения и детектор рентгеновского излучения могут перемещаться относительно объекта по меньшей мере в двух направлениях перемещения. Далее, даются видимые пользователю индикаторы 80 первого направления перемещения на детекторе рентгеновского излучения и/или на источнике рентгеновского излучения, для обозначения возможных направлений перемещения относительно объекта, например пациента, под операционной простыней 82.
Далее, на дисплее также предусмотрены индикаторы 81 второго направления перемещения относительно отображаемого изображения объекта для определения возможных направлений перемещения установки для получения изображений относительно объекта.
Индикаторы 80 первого направления перемещения могут иметь вид настраиваемых индикаторов направления перемещения. Индикаторы 80 первого направления перемещения могут быть сделаны так, чтобы сделать возможным взаимно однозначное определение дополнительного направления. Например, индикаторы 80 первого направления перемещения имеют вид символов с присвоенными значениями, так что направления перемещения задаются однозначно.
Например, даются индикаторы 80 первого направления перемещения для плоскости перемещения, причем индикаторы 80 первого направления перемещения выполнены в виде обозначений для ориентации на плоскости, например, в виде положения стрелок часов, как показано. В качестве дополнительного примера могут использоваться стороны света или цвета хроматического круга.
Индикаторы направления перемещения дают возможность безошибочной и надежной связи между хирургом и медицинским персоналом для перемещения системы рентгеновской визуализации.
Фиг. 8 показывает дополнительный пример подвижной системы 10 рентгеновской визуализации, где источник 14 рентгеновского излучения и детектор 16 рентгеновского излучения смонтированы на концах конструкции C-дуги с C-дугой 28, установленной на опорной конструкции 86. Далее, показаны также стол 88 пациента и система 90 дисплея, вместе с управляющим модулем 92 (не объясняется дополнительно).
Как показано на Фиг. 9, предусмотрен также способ 100 выравнивания устройства рентгеновской визуализации, содержащий следующие этапы. На этапе a) первое изображение по меньшей мере одной опорной точки получают 110 по меньшей мере одной камерой. На этапе b) получают 112 первое рентгеновское изображение исследуемого объекта с первыми параметрами проекции относительно объекта. Параметры проекции относятся к различным степеням свободы и содержат по меньшей мере одно из группы, состоящей из пространственного положения проекции, расстояния до объекта, направления обзора, или угла проекции, и поля обзора. Далее, на этапе c) соотносят 114 первое изображение с первыми параметрами проекции первого рентгеновского изображения относительно объекта. Далее, на этапе d) получают 116 фактическое изображение по меньшей мере одной камерой. На следующем этапе e) выводят 118 на дисплей по меньшей мере графическое представление по меньшей мере одной опорной точки на первом изображении, по меньшей мере частично наложенном на фактическое изображение, для управления выравнивающим перемещением источника рентгеновского излучения и/или детектора рентгеновского излучения и объекта относительно друг друга после промежуточного смещения. На этапе f) осуществляют выравнивающее перемещение 120 источника рентгеновского излучения и/или детектора рентгеновского излучения и объекта относительно друг друга для получения по меньшей мере одного дополнительного рентгеновского изображения в проекции, совпадающей с параметрами проекции первого рентгеновского изображения после промежуточного смещения, на основе отображаемых наложенных изображений.
В первом случае по меньшей мере одна камера устанавливается неподвижно относительно источника рентгеновского излучения и/или детектора рентгеновского излучения и по меньшей мере одна опорная точка остается в постоянном пространственном отношении к исследуемому объекту по меньшей мере во время относительного перемещения.
Во втором случае по меньшей мере одна камера временно устанавливается неподвижно относительно исследуемого объекта и по меньшей мере одна опорная точка остается в постоянном пространственном отношении к источнику рентгеновского излучения и/или к детектору рентгеновского излучения во время относительного перемещения.
Например, в случае, если не предусмотрено оборудование для цифрового считывания и хранения положений узла, например, при использовании традиционных подвижных штативов типа C-дуга, оператор системы проверяет положения узла, используя имеющуюся шкалу, прежде чем осуществить этап точного позиционирования с использованием функции «визуальных ориентиров». В другом случае камера может иметь объектив типа «рыбий глаз», поскольку такой тип обеспечивает широкое поле зрения и поэтому позволяет получить больше информации об изображении, что потенциально увеличивает точность позиционирования на этапе точного позиционирования с использованием функции «визуальных ориентиров».
В другом варианте изобретения C-дуга оснащена несколькими камерами (не показаны дополнительно) вдоль С-дуги. Совмещая все снимки с этих камер с соответствующими уже имеющимися снимками положения рентгеновской проекции с каждой камеры или по меньшей мере совмещая соответствующие графические представления опорных точек, можно восстановить положение С-дуги, не пользуясь какой-либо дополнительной информацией, такой как положения узла.
В другом примерном варианте осуществления настоящего изобретения предусмотрена компьютерная программа или компьютерный программный элемент, отличающийся тем, что он может быть выполнен с возможностью исполнения этапов способа по одному из предшествующих пунктов в подходящей системе.
Компьютерный программный элемент должен поэтому храниться в вычислительном модуле, который также должен являться частью варианта осуществления настоящего изобретения. Этот вычислительный модуль может быть выполнен с возможностью исполнения или запуска исполнения этапов способа, описанного выше. Более того, он может быть выполнен с возможностью работы с компонентами вышеописанного устройства. Вычислительный модуль может быть выполнен с возможностью работы в автоматическом режиме и/или для исполнения команд пользователя. Компьютерная программа может быть загружена в рабочую память процессора данных. Процессор данных может поэтому быть оборудован для исполнения способа по изобретению.
Этот примерный вариант осуществления изобретения включает в себя как компьютерную программу, с самого начала использующую изобретение, так и компьютерную программу, которая посредством обновлений превращает существующую программу в программу, использующую изобретение.
Далее, компьютерный программный элемент может быть способен обеспечить все необходимые этапы для выполнения способа согласно примерному варианту осуществления способа, как описано выше.
Согласно дополнительному примерному варианту осуществления настоящего изобретения предусмотрен машиночитаемый носитель, такой как CD-ROM, причем на машиночитаемом носителе записан компьютерный программный элемент, описанный в предыдущем абзаце.
Компьютерная программа может быть записана и/или распространена на подходящем носителе, таком как оптическое запоминающее устройство или твердотельное устройство, поставляемом вместе или являющемся частью другого оборудованию, но также может распространяться в других формах, например, по интернету или по другим проводным или беспроводным системам связи.
Однако компьютерная программа также может находиться в сети, такой как сеть Интернет, и может быть загружена в рабочую память процессора данных из такой сети. Согласно дополнительному примерному варианту осуществления настоящего изобретения предусмотрен носитель, обеспечивающий возможность загрузки компьютерного программного элемента, причем этот компьютерный программный элемент выполнен с возможностью исполнения способа согласно одному из описанных выше вариантов осуществления изобретения.
Следует отметить, что варианты осуществления изобретения описаны со ссылками на разные объекты изобретения. В частности, некоторые варианты осуществления описаны со ссылкой на пункты формулы типа «способ», тогда как другие варианты осуществления описаны со ссылками на пункты формулы типа «устройство». Однако специалисты в данной области техники поймут из вышеприведенного и последующего описания, что, если не указано иное, дополнительно к любой комбинации признаков, принадлежащих к одному типу объекта изобретения, в настоящей заявке считаются раскрытыми также любые комбинации признаков, относящихся к разным объектам изобретения. Тем не менее, все признаки можно комбинировать, получая синергетические эффекты, большие простой суммы признаков.
Хотя изобретение было проиллюстрировано и подробно описано на чертежах и в предшествующем описании, такая иллюстрация и описание должны рассматриваться как иллюстративные, или примерные, а не ограничивающие. Изобретение не ограничивается описанными вариантами осуществления. Другие варианты описанных вариантов осуществления могут быть поняты и осуществлены специалистами в данной области техники при работе с заявленным изобретением после изучения чертежей, описания и зависимых пунктов формулы изобретения.
В формуле изобретения слово «содержит» не исключает других элементов или этапов, а единственное число не исключает множественного. Единственный процессор или другой модуль может выполнять функции нескольких узлов, перечисленных в формуле изобретения. Только тот факт, что определенные характеристики перечислены во взаимно различных зависимых пунктах формулы изобретения, не означает, что комбинация этих признаков не может использоваться с получением преимущества. Никакие ссылочные позиции в формуле изобретения не должны считаться ограничивающими объем изобретения.





Группа изобретений относится к медицинской технике, а именно к средствам рентгеновской визуализации. Подвижная система рентгеновской визуализации для выравнивания исследуемого объекта и установки для рентгеновской визуализации относительно друг друга содержит установку для рентгеновской визуализации с источником рентгеновского излучения и детектором рентгеновского излучения, по меньшей мере одну камеру, процессор данных, дисплей, причем по меньшей мере одна камера либо прикреплена к установке для рентгеновской визуализации, либо может быть прикреплена к исследуемому объекту, выполнена с возможностью получения первого изображения по меньшей мере одной опорной точки, причем процессор данных выполнен с возможностью соотнесения первого изображения с первыми параметрами проекции первого рентгеновского изображения исследуемого объекта с объектом, причем параметры проекции относятся к различным степеням свободы и содержат по меньшей мере одно из группы, содержащей пространственное положение проекции, расстояние до объекта, направление обзора, или угол проекции, и поле обзора, причем для получения по меньшей мере одного дополнительного рентгеновского изображения в проекции, совпадающей с первыми параметрами проекции первого рентгеновского изображения, дисплей выполнен с возможностью отображения по меньшей мере графического представления по меньшей мере одной опорной точки на первом изображении, по меньшей мере частично наложенном на фактическое изображение, полученное по меньшей мере одной камерой, для управления выравнивающим перемещением источника рентгеновского излучения и/или детектора рентгеновского излучения и объекта относительно друг друга после промежуточного смещения. Способ выравнивания при рентгеновской визуализации осуществляется посредством системы, включающей машиночитаемый носитель. Использование группы изобретений обеспечивает расширение арсенала средств для визуальной регулировки подвижной системы рентгеновской визуализации. 3 н. и 11 з.п. ф-лы, 9 ил.
1. Подвижная система (10) рентгеновской визуализации для выравнивания исследуемого объекта и установки для рентгеновской визуализации относительно друг друга, причем система содержит:
- установку (12) для рентгеновской визуализации с источником (14) рентгеновского излучения и детектором (16) рентгеновского излучения;
- по меньшей мере одну камеру (18);
- процессор (20) данных; и
- дисплей (22);
причем по меньшей мере одна камера i) либо прикреплена к установке для рентгеновской визуализации, либо ii) может быть прикреплена к исследуемому объекту;
причем по меньшей мере одна камера выполнена с возможностью получения первого изображения по меньшей мере одной опорной точки; причем процессор данных выполнен с возможностью соотнесения первого изображения с первыми параметрами проекции первого рентгеновского изображения исследуемого объекта с объектом; причем параметры проекции относятся к различным степеням свободы и содержат по меньшей мере одно из группы, содержащей пространственное положение проекции, расстояние до объекта, направление обзора, или угол проекции, и поле обзора; и
причем для получения по меньшей мере одного дополнительного рентгеновского изображения в проекции, совпадающей с первыми параметрами проекции первого рентгеновского изображения, дисплей выполнен с возможностью отображения по меньшей мере графического представления по меньшей мере одной опорной точки на первом изображении, по меньшей мере частично наложенном на фактическое изображение, полученное по меньшей мере одной камерой, для управления выравнивающим перемещением источника рентгеновского излучения и/или детектора рентгеновского излучения и объекта относительно друг друга после промежуточного смещения.
2. Система рентгеновской визуализации по п. 1, в которой дисплей выполнен с возможностью отображения графического представления:
a) в форме по меньшей мере одного устанавливаемого вручную маркера; причем дисплей выполнен с возможностью отображения по меньшей мере одного маркера, по меньшей мере частично наложенного на фактическое изображение; и/или
b) в форме собственно первого изображения; причем дисплей выполнен с возможностью отображения первого изображения, по меньшей мере частично наложенного на фактическое изображение.
3. Система рентгеновской визуализации по п. 1 или 2, в которой:
i) по меньшей мере одна камера остается в известном пространственном отношении к источнику рентгеновского излучения и/или к детектору рентгеновского излучения; и по меньшей мере одна опорная точка остается в постоянном пространственном отношении к исследуемому объекту по меньшей мере во время относительного перемещения; или
ii) по меньшей мере одна камера временно установлена неподвижно относительно исследуемого объекта; и по меньшей мере одна опорная точка остается в известном пространственном отношении к источнику рентгеновского излучения и/или к детектору рентгеновского излучения во время относительного перемещения.
4. Система рентгеновской визуализации по п. 1 или 2, в которой для выравнивающего перемещения источника рентгеновского излучения и/или детектора рентгеновского излучения относительно объекта дисплей выполнен с возможностью отображения фактического изображения, наложенного на по меньшей мере одно графическое представление по меньшей мере одной опорной точки на первом изображении, по меньшей мере последовательно в первом и втором масштабе, обеспечивая возрастающий коэффициент усиления для улучшения приближения выравнивания.
5. Система рентгеновской визуализации по п. 1 или 2, в которой для получения дополнительных рентгеновских изображений:
- в первом приближении опорная конструкция (30) выполнена с возможностью перемещения таким образом, чтобы источник рентгеновского излучения и/или детектор рентгеновского излучения оставались внутри заданного диапазона положения первой проекции;
- причем опорная конструкция содержит по меньшей мере один подвижный узел (38) с детектируемыми положениями узла и является подвижной в заданном диапазоне совпадающих положений узла во втором приближении; и
- причем дисплей выполнен с возможностью отображения по меньшей мере графического представления опорной точки на первом изображении, наложенном на фактическое изображение, для выравнивания в третьем приближении.
6. Система рентгеновской визуализации по п. 1 или 2, в которой
i) предусмотрены по меньшей мере две опорные точки; или
ii) предусмотрены по меньшей мере три опорные точки.
7. Система рентгеновской визуализации по п. 1 или 2, в которой предусмотрена по меньшей мере одна опорная точка:
- на исследуемом объекте; и/или
- на опорном поле (42), предусмотренном в помещении для исследований.
8. Система рентгеновской визуализации по п. 1 или 2, в которой по меньшей мере одна опорная точка выполнена в виде лазерной проекции (44).
9. Система рентгеновской визуализации по п. 1 или 2, в которой предусмотрены датчики для определения угла относительного перемещения, который нельзя определить с помощью камеры.
10. Система рентгеновской визуализации по п. 1 или 2, в которой камера снабжена
- источником света для получения изображения в темноте; и/или
- широкоугольным объективом для получения изображения в области вокруг опорной точки.
11. Система рентгеновской визуализации по п. 1 или 2, в которой для выравнивающего перемещения источник рентгеновского излучения и/или детектор рентгеновского излучения выполнены с возможностью перемещения относительно объекта по меньшей мере в двух направлениях перемещения;
- причем на источнике рентгеновского излучения и/или на детекторе рентгеновского излучения предусмотрены индикаторы (80) первого направления перемещения, видимые пользователю, для указания возможных направлений перемещения относительно объекта; и
- причем на дисплее предусмотрены индикаторы (84) второго направления перемещения относительно отображаемых данных изображения для указания возможных направлений перемещения оборудования для получения изображений относительно объекта.
12. Система рентгеновской визуализации по п. 11, в которой могут быть предусмотрены индикаторы первого направления перемещения для плоскости перемещения, причем индикаторы первого направления перемещения выполнены в виде обозначений для ориентации на плоскости, таких как а) положения стрелок часов; и/или b) направления по сторонам света; и/или с) цвета хроматического круга.
13. Способ (100) выравнивания при рентгеновской визуализации, содержащий следующие этапы, на которых:
a) получают (110) первое изображение по меньшей мере одной опорной точки по меньшей мере одной камерой;
b) получают (112) первое рентгеновское изображение исследуемого объекта с первыми параметрами проекции относительно объекта; причем параметры проекции относятся к различным степеням свободы и содержат по меньшей мере одно из группы, состоящей из пространственного положения проекции, расстояния до объекта, направления обзора, или угла проекции, и поля обзора;
c) соотносят (114) первое изображение с первыми параметрами проекции первого рентгеновского изображения относительно объекта;
d) получают (116) фактическое изображение по меньшей мере одной камерой;
e) отображают (118) по меньшей мере графическое представление по меньшей мере одной опорной точки на первом изображении, по меньшей мере частично наложенном на фактическое изображение, для управления выравнивающим перемещением источника рентгеновского излучения и/или детектора рентгеновского излучения и объекта относительно друг друга после промежуточного смещения; и
f) выполняют выравнивающее перемещение (120) источника рентгеновского излучения и/или детектора рентгеновского излучения и объекта относительно друг друга для получения по меньшей мере одного дополнительного рентгеновского изображения в проекции, совпадающей с первыми параметрами проекции первого рентгеновского изображения после промежуточного смещения, на основе отображения наложенных изображений;
причем либо:
i) по меньшей мере одна камера установлена неподвижно относительно источника рентгеновского излучения и/или детектора рентгеновского излучения; и по меньшей мере одна опорная точка остается в постоянном пространственном отношении к исследуемому объекту по меньшей мере во время относительного перемещения;
либо:
ii) по меньшей мере одна камера временно установлена неподвижно относительно исследуемого объекта; и по меньшей мере одна опорная точка остается в постоянном пространственном отношении к источнику рентгеновского излучения и/или к детектору рентгеновского излучения во время относительного перемещения.
14. Машиночитаемый носитель подвижной системы рентгеновской визуализации, на котором записан компьютерный программный элемент для управления устройством по одному из пп. 1-12, который при исполнении модулем процессора выполнен с возможностью осуществления способа по п. 13.
| US 2008198971 A1, 21.08.2008 | |||
| US 2004122311 A1, 24.06.2004 | |||
| US 2007135803 A1, 14.06.2007 | |||
| Зернистый материал для осуществления оптической сигнализации | 1935 |
|
SU46166A1 |

