Область техники
Изобретение относится к области измерительной техники и может быть использовано для бесконтактного измерения расстояний до объектов, координат точек их поверхности, а также определения формы объектов.
Предшествующий уровень техники
Определение расстояния до точек объекта (дальнометрия), измерение их координат, а также формы поверхности объекта (профилометрия) необходимо для решения многих прикладных и научно-технических задач. Бесконтактные методы дальнометрии и профилометрии применяются при конструировании, в дизайне, реверс-инжиниринге. Они также используются в системах компьютерного зрения, виртуальной и дополненной реальности, для управления транспортными средствами и робототехническими устройствами, в медицине и т.д. Известно множество способов бесконтактных активных оптических измерений расстояния до объектов, координат точек их поверхности и ее формы (см., например, [1 - 5]). Значительная часть этих способов основана на использовании лазерных устройств. В частности, к ним относятся времяпролетные способы дальнометрии и профилометрии, использующие, например, лидары [1 - 6], а также способы, основанные на использовании лазерной триангуляции, лазерной структурированной подсветки и т.д. (см., например, [1 - 5, 7]). Недостатками этих способов является сложность и высокая стоимость лазерных устройств, сложность методов обработки полученных данных, отрицательное влияние на результаты измерений спекл-структуры лазерного излучения, переотражения и рассеяния лазерных лучей, опасность лазерного излучения для глаз и оптических устройств и т.д.
Известны способы активной оптической дальнометрии и профилометрии, в которых не используются лазерные источники света. Известен способ определения формы объекта, основанный на измерении резкости фокусировки на поверхность объекта изображения плоских периодических транспарантов, которые установлены в оптическом проекторе и освещаются некогерентным светом [8 - 13]. Периодические полосы света фокусируются на поверхность объекта с помощью объектива, установленного на выходе оптического проекционного устройства. Контраст проекции световых полос на поверхность определяется вычислительным устройством по изображению объекта, регистрируемому устройством регистрации изображений, например, телекамерой. Оптические оси проектора и устройства регистрации изображений обычно совпадают. Максимальный контраст изображения полос достигается в областях поверхности объекта, совпадающих с плоскостью фокусировки объектива проекционного устройства. Расстояние до этой плоскости измеряется заранее при калибровке устройства или рассчитывается. Положение плоскости, где контраст световых полос максимален, относительно объекта изменяют путем перемещения проектора или объекта вдоль оптической оси проектора, либо путем изменения фокальной длины объектива проектора. Перемещая фокальную плоскость проектора относительно объекта, сканируют ею поверхность объекта, регистрируют изображения проекции полос света на поверхность, затем, обрабатывая полученные изображения, определяют расстояние до различных точек поверхности объекта, а также его форму. Способ измерений и устройство, аналогичные вышеописанным, используются также для осуществления профилометрии микрообъектов с помощью широкопольного микроскопа [14, 15]. Недостатками этого способа оптической дальнометрии, профилометрии и микроскопии является необходимость использования сложного оптического проекционного устройства, включающего в себя высококачественный объектив, влияние несовершенства объектива проекционного устройства на точность и надежность измерений, ограниченность поля, освещаемого проекционным устройством.
Известны оптические фазовые и триангуляционные способы измерения 3D формы объекта, которые основаны на проецировании на поверхность объекта периодической структурированной подсветки, например, периодических полос света, и регистрации изображения этой поверхности (см., например, [2, 16 – 20]). Периодическую в пространстве освещенность поверхности объекта создают с помощью проектора, в котором некогерентный пучок света, излучаемый источником света, пространственно модулируется при прохождении через транспарант, коэффициент пропускания которого периодически зависит от координаты, поперечной к оптической оси проектора. С помощью объектива, который установлен на выходе этого проектора, объект освещается расходящимся пространственно модулированным пучком света. Использование управляемых компьютером оптических проекторов, например, с жидкокристаллическими транспарантами или другими пространственными модуляторами света, позволяет динамически управлять периодом и фазой пространственной модуляции интенсивности света, освещающего объект. Проекцию периодических полос света на поверхности объекта регистрируют устройством регистрации изображений, например, теле- или фотокамерой. Угол между оптической осью проектора и оптической осью устройства регистрации изображений обычно достаточно большой. На картину проекции периодических полос света на объект влияет форма его поверхности, в частности, от нее зависит вариация фазы проекции периодических полос света и смещение заданной полосы. При использовании триангуляционного способа форма объекта и расстояние до его точек определяется по углам, под которыми проектируются на поверхность объекта и наблюдаются полосы периодической световой структуры [1]. Недостатком триангуляционного способа является невысокая точность определения этих углов и сложность определения номеров полос проецируемой периодической световой структуры. При использовании фазового способа измерений фаза проекции периодических полос света определяется путем нахождения, например, пространственного Фурье спектра изображения поверхности объекта или методом пошагового сдвига фазы этих световых полос [2, 19]. По измеренной зависимости вариации фазы проекции от координат на изображении объекта определяется его форма. Недостатком фазовых способов является неоднозначность вычисления фазы по изображению проекции периодически структурированного света на поверхность объекта. Были предложены различные способы устранения неоднозначности вычисления фазы изображения периодической структурированной подсветки, проецируемой на поверхность объекта с помощью оптического проектора с объективом (см., например, патенты [21 - 24]). Используя такие способы, можно измерять абсолютные значения координат точек поверхности объекта, но для этого требуется усложнение проекционой системы, а также методики обработки результатов измерений. Кроме указанных выше спецефических недостатков фазовых и триангуляционных способов измерения 3D формы объектов с использованием периодического структурированного освещения их общими недостатками являются:
• Сложность и высокая стоимость оптического проектора с объективом,
• Ограниченность поперечного размера области поверхности, освещаемой одним проектором,
• Трудность измерения формы негладких поверхностей, поверхностей с разрывами или скачками высоты,
• Необходимость калибровки измерительной системы в целом.
Известны способы формирования периодических структурированных пучков некогерентного света без использования сложных и дорогих проекционных устройств с объективом [25 - 33]. Для формирования периодически структурированных пучков некогерентного света в этих способах используют двухрешеточное устройство, включающее в себя источник света и две плоские одномерные периодические решетки с одинаковым направлением полос, которые расположены с одной стороны от источника света в параллельных удаленных друг от друга плоскостях. Способ формирования периодически структурированных пучков света таким двухрешеточным устройством основан на обобщенном эффекте формирования псевдоизображения решетки. Этот эффект состоит в том, что при последовательном прохождении некогерентным светом, излучаемым источником, через две плоские периодические решетки за дальней от источника света решеткой возникают световые муаровые структуры, которые имеют периодическую пространственную модуляцию интенсивности света. Такую муаровую структуру называют обобщенным псевдоизображением решетки [28, 32, 33]. Частным случаем обобщенного эффекта формирования псевдоизображения решетки является эффект Лау [27, 28, 31, 34 - 36]. В этом частном случае контрастное псевдоизображение решетки возникает на бесконечном удалении от двухрешеточного устройства, а для формирования периодической модуляции света на конечном расстоянии используется линза, которая располагается за дальней от источника света решеткой. В публикации [37] рассмотрен способ определения расстояния между двумя параллельными решетками с разными пространственными периодами, основанный на измерении характеристик световой муаровой структуры, которая возникает после прохождения некогерентным светом этих решеток. Известно также оптическое двухрешеточное устройство, предназначенное для измерения величины перемещения одной из решеток, а также величины перемещения прикрепленного к ней объекта в плоскости этой решетки в направлении, перпендикулярном направлению ее полос, в основе функционирования которого лежит обобщенный эффект формирования псевдоизображения решетки (см., например, [29, 38]). Такое устройство для измерения величины перемещения объекта является одним из вариантов линейного оптического энкодера. Двухрешеточный линейный энкодер не применим для измерения величины перемещения в направлении, которое перпендикулярно плоскостям решеток, и он не может быть использован для бесконтактного измерения расстояния до объектов, координат их точек и формы поверхности. Известны бесконтактные способы измерения формы объектов, которые используют обобщенный эффект формирования псевдоизображения решетки [39 - 42] или эффект Лау [43]. В этих способах форма объекта определяется по величине пространственной вариации фазы проекции на поверхности объекта периодической муаровой структуры, которая формируется с помощью двухрешеточного проекционного устройства. Изображение поверхности объекта, освещенного упомянутым проекционным устройством, регистрируется устройством регистрации изображений и обрабатывается вычислительным устройством с использованием, например, преобразования Фурье или метода пошагового фазового сдвига [40 - 43]. Для определения расстояния до точек объекта может быть применен триангуляционный метод измерений [39]. Система для реализации способа профилометрии с помощью обобщенного эффекта формирования псевдоизображения решетки [39] является прототипом системы, предлагаемой в настоящем изобретении. Система-прототип состоит из безобъективного проекционного устройства, а также из устройства регистрации изображений и вычислительного устройства [39 - 41]. Проекционное устройство включает в себя источник некогерентного света, две периодические решетки, расположенные в параллельных удаленных друг от друга плоскостях. Муаровая структура (псевдоизображение решетки), формируемая проекционным устройством-прототипом, слабо локализована в направлении оптической оси проектора, которая перпендикулярна плоскостям решеток. Достоинство двухрешеточного проекционного устройства, предложенного в патенте [39], в том, что оно проще и дешевле, чем проекторы структурированного света с объективом. Способ профилометрии, который описан в патенте [39], наиболее близкий к предлагаемому способу по технической сущности и совокупности элементов для его реализации. Этот способ является прототипом предлагаемого способа. Известному способу измерения [39 - 41], присущи недостатки фазовых и триангуляционных методов профилометрии и дальнометрии, в частности, проблематичность применения способа для измерения формы негладких поверхностей, ограниченность ширины области поверхности, освещаемой проекционным устройством, необходимость калибровки измерительной системы в целом. Кроме того, минусом триангуляционного способа является его невысокая точность и сложность определения номеров полос периодической световой структуры, проецируемой на объект. Применение фазового способа измерений осложняется неоднозначностью вычисления фазы проекции муаровой структуры на объект и отсутствием возможности определения расстояния до точек объекта. В частности, для определения расстояния от проекционного устройства, на котором нужно располагать объект, в патенте [39] предполагается использование дополнительного дальномера, например, лазерного.
Раскрытие изобретения
Принимая во внимание недостатки способов и систем дальнометрии и профилометрии, описанных в разделе Предшествующий уровень техники, в основе изобретения лежит задача предложить способ и систему, которые позволят устранить по крайней мере часть этих недостатков. В частности, задача данного изобретения заключается в том, чтобы предложить способ и систему, которые позволяют проводить широкопольные измерения абсолютного значения расстояния до точек поверхности объектов, их координат, а также форму объектов, в том числе объектов с негладкой поверхностью, используя периодически структурированный свет, излучаемый безобъективным проекционным устройством. Задача данного изобретения также состоит в том, чтобы предложить способ измерения расстояния до точек объектов и их формы, при реализации которого не возникает проблемы однозначного определения значения фазы и номеров полос проекции на объект периодически структурированного света.
Сущность предлагаемого способа так же, как и способа, который является прототипом, заключается в проецировании на поверхность объекта световой периодической муаровой структуры, формируемой с помощью двухрешеточного проекционного устройства, которое также будем называть двухрешеточным проектором, регистрации с помощью по меньшей мере одного регистрирующего устройства изображения участка поверхности объекта, на который спроецирована эта муаровая структура, математической обработке вычислительным устройством полученных изображений и определении на основе результатов этой обработки формы поверхности объекта. Новым в предложенном способе является то, что для дальнометрии и профилометрии используется по меньшей мере одна муаровая структура (псевдоизображение решетки), которая достаточно сильно локализована в продольном направлении, которое перпендикулярно плоскостям решеток, установленных в проекционном устройстве. Такая локализованная муаровая (ЛМ) структура формируется, например, с помощью описанного в изобретении двухрешеточного проекционного устройства. Проекцию упомянутой локализованной муаровой структуры перемещают по поверхности объекта, совмещают плоскость наибольшего контраста муаровой структуры с точкой на поверхности объекта, координаты которой нужно измерить. Используя известное значение расстояния до этой плоскости от плоскости выходной решетки проекционного устройства, определяют расстояние до заданной точки объекта и ее продольную координату. Используя эти данные, а также изображение объекта и результаты калибровки устройства регистрации изображений, определяют поперечные координаты заданной точки объекта. Сканируя поверхность объекта проекцией упомянутой локализованной муаровой структуры, регистрируя и математически обрабатывая изображения объекта, полученные при разном положении проекции ЛМ структуры, находят форму объекта. В предлагаемом способе в отличие от способа-прототипа при определении формы объекта и расстояния до его точек не требуется определения номера полосы или значения фазы проекции муаровой структуры и не возникает необходимость устранения неоднозначности величины этой фазы. Новым в предложенном способе является также то, что в отличие от ближайшего аналога он может быть использован не только для определения формы объекта, но и измерения абсолютной величины расстояния до его точек и их координат. Для реализации предлагаемого способа может быть использована как одна, так и большее число локализованных муаровых структур, формируемых по меньшей мере одним проекционным устройством. Отличие предлагаемого способа от способа-прототипа также в том, что он может быть реализован при параллельном расположении продольной оси проекционного устройства и оптической оси устройства регистрации изображений.
Предлагаемая система так же, как и система, которая является ее прототипом, содержит двухрешеточное проекционное устройство, устройство регистрации изображений и вычислительное устройство. Проекционное устройство содержит источник некогерентного света, первую и вторую плоские периодические решетки, которые расположены друг за другом в несовпадающих параллельных плоскостях с одной стороны от источника света, и которые освещаются упомянутым источником света, причем на вторую решетку падает свет, прошедший через первую решетку. Новым является то, что ширина источника света, первой и второй решеток, которые установлены в проекционном устройстве, а также ширина углового спектра света, излучаемая источником света, таковы, что формируется по меньшей мере одна локализованная муаровая структура. Увеличение ширины рабочей апертуры источника света и решеток, установленных в проекционном устройстве, позволяет увеличивать ширину непрерывной области, в пределах которой возможно проведение измерений с наименьшей ошибкой. Отличие от прототипа состоит также в том, что в предлагаемой системе применено устройство для осуществления сканирования поверхности объекта проекцией ЛМ структуры. В отличие от системы-прототипа, где в проекционном устройстве расстояние между решетками и их периоды фиксированы, в предлагаемой системе расстояние между решетками и их периоды можно управляемо изменять, и таким образом, в частности, осуществлять сканирование поверхности объекта проекцией ЛМ структуры. В предлагаемой системе также могут быть дополнительно применено устройство для изменения взаимной ориентации полос локализованной муаровой структуры и объекта.
Технический результат – упрощение системы дальнометрии и профилометрии, в том числе с позиций изготовления и управления, упрощение методики обработки данных измерений, отсутствие проблемы фазовой неоднозначности, увеличение ширины области, доступной для проведения измерений с помощью одного проекционного устройства, возможность определения формы негладких поверхностей, поверхностей с разрывами и скачками высоты.
Сущность изобретения поясняется следующими фигурами.
На фиг. 1 схематично изображена система оптической дальномерии и профилометрии, а также объект, на который спроецирована световая локализованная муаровая структура.
На фиг. 2 приведена схема проекционного устройства, которое формирует световую муаровую структуру.
На фиг. 3 схематично изображена проекция на плоскость y = 0 элементов проекционного устройства, устройства регистрации изображений, а также локализованной муаровой структуры с отображением позиционных и угловых соотношений между элементами устройств, световыми лучами и пространственными областями ЛМ структуры.
На фиг. 4 схематично изображена проекция на плоскость y = 0 элементов проекционного устройства и локализованной муаровой структуры с отображением позиционных и угловых соотношений между элементами устройства, световыми лучами и пространственными областями ЛМ структуры при  (фиг. 4(а)) и при
(фиг. 4(а)) и при  (фиг. 4(б)), где
(фиг. 4(б)), где  - угловой размер половины рабочей апертуры осветителя,
- угловой размер половины рабочей апертуры осветителя,  - полуширина углового спектра света, излучаемого осветителем.
- полуширина углового спектра света, излучаемого осветителем.
На фиг. 5 приведены изображения двух типов плоских одномерных амплитудных решеток: решетки с синусоидальной зависимостью амплитудного коэффициента пропускания от координаты (фиг. 5(а)) и периодического бинарного растра (фиг. 5(б)).
На фиг. 6 схематично изображена система оптической дальномерии и профилометрии, в которой используются несколько проекционных устройств и несколько устройств регистрации изображений.
Осуществление изобретения
Способ бесконтактной дальномерии и профилометрии и система для его осуществления будут обсуждены со ссылками на вышеупомянутые фигуры, на которых одноименные ссылочные позиции обозначают одни и те же элементы. Способ может быть реализован с помощью системы, схематическое изображение которой приведено на фиг. 1 (п. 16 формулы изобретения). Система включает в себя безобъективное проекционное устройство 1, по меньшей мере одно устройство регистрации изображений 2, вычислительное устройство 3, а также по меньшей мере одно устройство для осуществления перемещения проекции локализованной муаровой структуры 4, формируемой проекционным устройством 1, по поверхности контролируемого объекта 5. Схема проекционного устройства 1 показана на фиг. 2 (п. 17 формулы изобретения). Проекционное устройство 1 по п. 17 формулы изобретения включает в себя пространственно протяженный источник некогерентного света 6, который также будем называть осветителем, и две параллельные плоские одномерные (1D) периодические решетки 7 и 8. Первая, ближняя к осветителю 6, решетка 7 и вторая, выходная, решетка 8 расположены с одной стороны от источника света 6. Полосы этих решеток имеют одинаковое направление. Предпочтительно, чтобы решетки 7 и 8 имели прямоугольную форму. Светящаяся поверхность источника света 6 обращена к решеткам 7 и 8. В частном случае, по п. 18 формулы изобретения, пространственно протяженный источник света 6, установленный в проекционном устройстве 1, является источником диффузного света. Таким источником диффузного света, например, может являться поверхность нагретого тела, люминесцентная лампа, люминесцентный экран, экран телефона, телевизора, планшета или компьютерного монитора, поверхность органического и неорганического светоизлучающего диода. Источником диффузного света также может являться участок дневного неба, поверхность случайного фазового транспаранта, например, матового стекла, листа кальки или папиросной бумаги, освещаемая с противоположной от решеток стороны, и т.п. Проекционное устройство 1 формирует по меньшей мере одну световую ЛМ структуру. Локализованная муаровая структура может формироваться в зоне геометрической оптики (ГО) (п. 2 формулы изобретения) или в зоне дифракции Френеля проекционного устройства 1 (п. 3 формулы изобретения). Условное изображение распределения интенсивности света у ЛМ структуры в плоскости, параллельной плоскостям решеток (см. фиг. 2) или в плоскости, перпендикулярной направлению их штрихов (см. фиг. 3 и 4), обозначается на фигурах цифрой 9. На фиг. 1 и 2 изображена правая ортогональная система координат с осями x, y и z, которая связана с проекционным устройством 1. Ось координат z направлена перпендикулярно плоскостям решеток 7 и 8, в направлении от источника света 6 к решетам. Если вторая решетка 8 имеет прямоугольную форму, то ось z проходит через ее центр, и называется далее по тексту оптической осью проекционного устройства 1. Ось y направлена вдоль направления полос решеток 7 и 8 (см. фиг. 2). Коэффициенты пропускания решеток 7 и 8 зависят периодически от координаты x. Направление оси z далее по тексту будем называть продольным, направления, перпендикулярные оси z, будем называть поперечными. Будем называть размеры объекта 5, рабочих апертур источника света 6, решеток 7 и 8 в направлении оси x – их шириной, в направлении оси y – высотой, в направлении оси z – длиной или толщиной. Плоскость  совпадает с плоскостью первой решетки 7. Вторая, выходная решетка 8 расположена в плоскости
совпадает с плоскостью первой решетки 7. Вторая, выходная решетка 8 расположена в плоскости  , т.е. плоскости первой и второй решеток удалены друг от друга на расстояние
, т.е. плоскости первой и второй решеток удалены друг от друга на расстояние  . Расстояние в продольном направлении от второй решетки 8 при
. Расстояние в продольном направлении от второй решетки 8 при  будем также называть расстоянием от проекционного устройства 1. В частном случае, когда рабочая поверхность осветителя 6 является плоской и она расположена параллельно плоскостям решеток, расстояние между рабочей поверхностью осветителя 6 и плоскостью первой решетки 7 будем обозначать L0. Оно может быть равно нулю. Координата центра рабочей поверхности осветителя по оси
будем также называть расстоянием от проекционного устройства 1. В частном случае, когда рабочая поверхность осветителя 6 является плоской и она расположена параллельно плоскостям решеток, расстояние между рабочей поверхностью осветителя 6 и плоскостью первой решетки 7 будем обозначать L0. Оно может быть равно нулю. Координата центра рабочей поверхности осветителя по оси  равна
равна  . На фиг. 1 также изображена глобальная неподвижная система координат с осями
. На фиг. 1 также изображена глобальная неподвижная система координат с осями  ,
,  и
и  . В частном случае (п. 19 формулы изобретения) в системе может быть дополнительно использовано устройство для определения координат и ориентации проекционного устройства 1 в глобальной системе координат.
. В частном случае (п. 19 формулы изобретения) в системе может быть дополнительно использовано устройство для определения координат и ориентации проекционного устройства 1 в глобальной системе координат.
Система дальномерии и профилометрии включает в себя по меньшей мере одно устройство, предназначенное для осуществления перемещения и/или изменения ориентации ЛМ структуры и объекта 5 относительно друг друга. На фиг. 1 и фиг. 2 толстыми стрелками показаны направления возможных поступательных перемещений и вращения элементов системы дальномерии и профилометрии и объекта 5 в разных частных случаях реализации способа и системы. В частном случае (п. 20 формулы изобретения) может быть использовано устройство, которое изменяет расстояние между проекционным устройством 1 и объектом 5 путем поступательного перемещения проекционного устройства 1 и/или объекта 5. В частности, сближение или удаление проекционного устройства 1 и объекта 5 может осуществляться с заданной скоростью. В частном случае (п. 21 формулы изобретения) для изменения взаимного положения ЛМ структуры и объекта 5, могут использоваться устройства для поворота проекционного устройства 1 и/или объекта 5. В качестве примера на фиг. 1 схематически показано устройство 10, предназначенное для перемещения и/или изменения ориентации в пространстве проекционного устройства 1. В частном случае реализации системы (п. 22 формулы изобретения) в проекционном устройстве 1 может использоваться устройство, которое контролируемо изменяет расстояние между решетками 7 и 8 в продольном направлении или осуществляет сближение или удаление решеток 7 и 8 в этом направлении с заданной скоростью. Дополнительно может иметься устройство для поступательного перемещения по меньшей мере одной из решеток 7 и 8 в ее плоскости в направлении координаты x, что приводит к изменению фазы квазипериодической муаровой структуры, формируемой проекционным устройством 1 (п. 23 формулы изобретения). Устройства, которые в разных частных случаях реализации системы могут осуществлять перемещение и вращение объекта 5, перемещение решеток 7 и 8, на фигурах не показаны. Устройства, с помощью которых осуществляется изменение взаимного положения и ориентации проекционного устройства 1 и объекта 5, также изменение положения отдельных элементов проекционного устройства 1 общеизвестны и коммерчески доступны [44 - 47]. Система дальнометрии и профилометрии также содержит по меньшей мере одно устройство, предназначенное для измерения величины изменения положения и/или ориентации по меньшей мере одного предмета из набора, включающего объект 5, проекционное устройство 1, решетки 7 и 8. Такие устройства общеизвестны и коммерчески доступны [44 - 46, 48]. В частном случае устройство для осуществления перемещения и/или изменения ориентации элементов системы или объекта 5 и устройство измерения величин их перемещения, а также углов их поворота могут быть объединены в одном устройстве или являться одним устройством.
Устройство регистрации изображений 2 предназначено для регистрации изображения по меньшей мере одно объекта 5 (см. фиг. 1). Устройством регистрации изображений 2 может являться, например, телекамера или фотокамера. Датчиком изображений 11 в устройстве регистрации изображений 2 служит, например, ПЗС (прибор с зарядовой связью) или КМОП (комплементарная структура металл-оксид-полупроводник) матрица. Объектив 12 проецирует падающий на него свет на датчик изображений 11 устройства регистрации изображений 2 (см. фиг. 1 и 3). Предпочтительно предварительно провести калибровку устройства регистрации изображений 2 известными методами, например, с помощью шаблона в виде шахматной доски [19, 49]. Устройство регистрации изображений 2 может быть неподвижным или оно может перемещаться поступательно и вращаться. Для перемещения и вращения устройства регистрации изображений 2, а также определения его положения и ориентации используются общеизвестные устройства (на фигурах не показаны). В частном случае, по меньшей мере одно устройство регистрации изображений 2 может быть жестко связанно с проекционным устройством 1, тогда оно перемещается и поворачивается вместе с ним. В частном случае (п. 24 формулы изобретения) оптическая ось устройства регистрации изображений 2 параллельна продольной оси проекционного устройства 1.
Вычислительное устройство 3 предназначено для расчета расстояния до точек поверхности объекта 5 и их координат, а также формы поверхности объекта 5 на основе изображений, полученных устройством регистрации изображений 2. Вычислительное устройство 3 представляет собой, например, компьютер или мобильное вычислительное устройство. Вычислительное устройство 3 кроме хранения и обработки информации, полученной от устройства регистрации изображений 2, осуществляет обработку и хранение данных, полученных от других устройств системы, а также управление устройствами системы и их элементами. В частности, оно может осуществлять обработку и хранение данных о величинах перемещения, скоростях движения и углах поворота проекционного устройства 1, устройства регистрации изображений 2, объекта 5, решеток 7 и 8, которые поступают с устройств, регистрирующих эти величины.
Амплитудные коэффициенты пропускания решеток 7 и 8, которые установлены в проекционном устройстве 1, в общем случае могут быть комплексными. В частном случаем реализации системы (п. 25 формулы изобретения) в проекционном устройстве 1 установлена по меньшей мере одна решетка, имеющая действительный положительный амплитудный коэффициент пропускания, которая называется амплитудной решеткой. В частном случае (п. 26 формулы изобретения) по меньшей мере одна решетка, установленная в проекционном устройстве 1, является 1D амплитудной решеткой с синусоидальной зависимостью величины изменения амплитудного коэффициента пропускания от координаты x (см. фиг. 5(а)) [37, 50, 51]. Такую решетку будем называть амплитудной решеткой c синусоидальным пропусканием. В другом частном случае (п. 27 формулы изобретения) по меньшей мере одна решетка может быть 1D амплитудной решеткой, которая имеет бинарную зависимость коэффициента пропускания от поперечной координаты, например, представляет собой периодически чередующиеся вдоль координаты x прозрачные и непрозрачные параллельные прямоугольные полосы, которые имеют резкие границы (см. фиг. 5(б)) [31, 32, 41, 42, 44, 52, 53]. Такие решетки также называются периодическими бинарными растрами. Достоинством использования в проекционном устройстве периодических бинарных растров является простота и невысокая стоимость изготовления этих решеток, их коммерческая доступность [44, 48, 53]. В другом частном случае (п. 28 формулы изобретения) в проекционном устройстве 1 может использоваться по меньшей мере одна фазовая решетка, т.е. решетка с периодической зависимостью фазы амплитудного коэффициента пропускания от поперечной координаты и постоянным модулем этого коэффициента [52, 54]. В качестве еще одной альтернативы в проекционном устройстве можно использовать по меньшей мере одну решетку, объединяющую в себе амплитудную и фазовую решетку [52, 55, 56]. Амплитудные, фазовые и амплитудно-фазовые решетки изготавливаются известными фотографическими, голографическими, литографическими, печатными и другими методами. Решетки некоторых упомянутых типов коммерчески доступны [44, 48, 54]. В частном случае (п. 29 формулы изобретения) в проекционном устройстве 1 может быть использована по меньшей мере одна решетка, характеристики которой можно изменять. Например, по меньшей мере одной из решеток, установленных в оптическом проекционном устройстве 1, может быть амплитудный бинарный растр, у которого коэффициент заполнения и/или период можно изменять. В частном случае (п. 30 формулы изобретения) для формирования по меньшей мере одной из решеток, установленных в проекционном устройстве 1, может быть использован пространственный модулятор света [57 - 59].
Проекционное устройство 1 в частном случае его реализации (п. 31 формулы изобретения), когда первая решетка 7 и вторая решетка 8 являются 1D амплитудными решетками, работает следующим образом. Свет, излучаемый осветителем 6, проходит сначала через первую решетку 7, затем через вторую решетку 8. При прохождении света через амплитудную решетку, происходит пространственная модуляция его интенсивности, поэтому за каждой из решеток 7 и 8 наблюдаются периодические полосы света и тени. При освещении решетки некогерентным светом от протяженного источника или диффузным светом контраст полос света и тени уменьшается по мере удаления от решетки в продольном направлении. Это происходит потому, что при широком угловом спектре света, падающего на решетку, полосы света и тени, которые возникают после прохождения через нее плоских световых волн, распространяющихся под разными углами к ее поверхности, «перемешиваются» на некотором расстоянии за решеткой. На достаточно большом расстоянии от решетки интенсивность света становится почти постоянной в пространстве. Однако существуют плоскости, параллельные плоскостям решеток 7 и 8 и удаленные от них в продольном направлении на известные расстояния, в окрестности которых проекционное устройство 1 может сформировать световые муаровые структуры, представляющие собой периодические в пространстве области света и тени [25 - 28, 31 – 33, 60 - 63]. Проекция этих световых муаровых структур на плоскость, параллельную плоскостям решеток, имеет вид периодических светлых и темных полос, которые направлены вдоль оси y (см. фиг. 2). Формирование локализованной муаровой структуры может быть интерпретировано, в частности, как эффект теневого эха [60, 62, 63], которое является частным случаем модуляционного эха [61]. Муаровые структуры, формируемые двухрешеточным проекционным устройством с 1D решетками, обозначаются двумя индексами (N,M) (см. п. 4 формулы изобретения), где N и M - натуральные числа. Расстояние от плоскости выходной решетки 8 проекционного устройства 1 до плоскости, где контраст муаровой структуры (N,M) максимален, вычисляют по формуле

где  ,
,  и
и  - пространственные периоды первой и второй решетки соответственно [27, 31, 33, 64, 65]. Координата плоскости, где контраст муаровой структуры (N,M) имеет наибольшую величину, равна
- пространственные периоды первой и второй решетки соответственно [27, 31, 33, 64, 65]. Координата плоскости, где контраст муаровой структуры (N,M) имеет наибольшую величину, равна  , где
, где  . Зависимость интенсивности света от координаты x вблизи плоскости наибольшего контраста муаровой структуры (N,M) описывается периодической функцией, пространственный период
. Зависимость интенсивности света от координаты x вблизи плоскости наибольшего контраста муаровой структуры (N,M) описывается периодической функцией, пространственный период  которой вычисляют по формуле [27, 31, 33, 64, 65]
которой вычисляют по формуле [27, 31, 33, 64, 65]

Контраст муаровой структуры (N,M) вычисляют по формуле

где  и
и  - максимальное и минимальное значение интенсивности света в плоскости z = const [64, 66]. Расстояние в направлении оси x между точками, в которых определяются величины и , равно
- максимальное и минимальное значение интенсивности света в плоскости z = const [64, 66]. Расстояние в направлении оси x между точками, в которых определяются величины и , равно  , где
, где  - натуральное число, включая ноль. Пространственное распределение интенсивности света в плоскости
- натуральное число, включая ноль. Пространственное распределение интенсивности света в плоскости  недалеко от линии условно изображено на фиг. 3 и 4 и обозначено цифрой 9. Глубину резкости муаровой структуры (N,M) будем обозначать
недалеко от линии условно изображено на фиг. 3 и 4 и обозначено цифрой 9. Глубину резкости муаровой структуры (N,M) будем обозначать  . Глубина резкости равна удвоенному значению длины, при удалении на которую в продольном направлении от плоскости контраст муаровой структуры (N,M) уменьшается в два раза по сравнению со значением ее контраста в плоскости . Проекционное устройство 1 в варианте его реализации, предлагаемом в изобретении, формирует световые муаровые структуры, которые достаточно сильно локализованы в продольном направлении. Локальность муаровой структуры (N,M) означает, что ее глубина резкости значительно меньше расстояния от проекционного устройства 1 до плоскости, на которой контраст этой муаровой структуры имеет наибольшее значение
. Глубина резкости равна удвоенному значению длины, при удалении на которую в продольном направлении от плоскости контраст муаровой структуры (N,M) уменьшается в два раза по сравнению со значением ее контраста в плоскости . Проекционное устройство 1 в варианте его реализации, предлагаемом в изобретении, формирует световые муаровые структуры, которые достаточно сильно локализованы в продольном направлении. Локальность муаровой структуры (N,M) означает, что ее глубина резкости значительно меньше расстояния от проекционного устройства 1 до плоскости, на которой контраст этой муаровой структуры имеет наибольшее значение  . Конкретно будем полагать, что у локализованной муаровой структуры (N,M) относительная глубина резкости ЛМ
. Конкретно будем полагать, что у локализованной муаровой структуры (N,M) относительная глубина резкости ЛМ  должна быть по крайней мере меньше 0,25.
должна быть по крайней мере меньше 0,25.
Анализ характеристик муаровых структур, формируемых проекционным устройством в разных частных случаях реализации этого устройства, рассмотрение условий, при которых могут формироваться локализованные муаровые структуры, оценка точности предлагаемого способа дальнометрии и профилометрии, а также ряда других его характеристик будут проведены после описания частных случаев реализации способа.
Способ в частном случае его реализации для измерения расстояния до по крайней мере одной заданной точки 13 поверхности объекта 5 (см. фиг. 1) и координат этой точки осуществляется следующим образом. Поверхность объекта 5 освещают светом, излучаемым проекционным устройством 1. В проекционном устройстве 1 используют элементы, в частности, решетки 7 и 8, с такими параметрами, чтобы возникала по меньшей мере одна локализованная муаровая структура. В частности, по п. 5 формулы изобретения для реализации способа может быть использована по меньшей мере одна из ЛМ структур: (1,3), (1,2), (1,1), (2,1) и (3,1). Предпочтительно использовать для измерений ЛМ структуры с достаточно высоким контрастом, например, по п. 6 формулы изобретения наибольшее значение контраста ЛМ структуры превышает величину 0,2. По п. 7 формулы изобретения одним проекционным устройством может одновременно формироваться несколько ЛМ структур. Для упрощения дальнейшего описания способа дальнометрии и профилометрии будем считать, что, если не указано обратное, на поверхность объекта 5 проецируют одну ЛМ структуру, индекс (N,M) которой известен. Обычно по меньшей мере одно устройство регистрации изображений 2 фокусируют приблизительно на плоскость наибольшего контраста этой ЛМ структуры. Предпочтительно, во-первых, чтобы глубина резкости объектива 12 устройства регистрации изображений 2 была по крайней мере в два раза больше, чем глубина резкости муаровой структуры (N,M); во-вторых, чтобы ширина ЛМ структуры (N,M), используемой для измерений,  (см. фиг. 4) превосходила период муаровой структуры по меньшей мере в два раза. Если ширина проекции на плоскость
(см. фиг. 4) превосходила период муаровой структуры по меньшей мере в два раза. Если ширина проекции на плоскость  const контролируемой части поверхности объекта 5 значительно больше, чем период используемой ЛМ структуры, а также тангенс угла между поверхностью объекта и плоскостью в областях их пересечения меньше, чем
const контролируемой части поверхности объекта 5 значительно больше, чем период используемой ЛМ структуры, а также тангенс угла между поверхностью объекта и плоскостью в областях их пересечения меньше, чем  , то проекция 4 ЛМ структуры на поверхность объекта 5 имеет вид области или нескольких областей, в пределах которых наблюдаются квазипериодические по координате x светлые и темные полосы (см. фиг. 1). Форма области на поверхности объекта 5, где проекция 4 ЛМ структуры имеет относительно высокий контраст, зависит от формы поверхности объекта 5 и глубины резкости муаровой структуры (N,M). Плоскость , где контраст муаровой структуры (N,M) является наибольшим, пересекается с поверхностью объекта 5 по плоской линии, которую будем называть изолинией наибольшего контраста ЛМ структуры. Например, с плоскими поверхностями плоскость пересекается по отрезкам прямых линий (они показаны штрих-пунктирными линиями 14 на фиг. 1), со сферическими поверхностями – по кругу или по дуге окружности. Изображение поверхности объекта 5, освещаемой проекционным устройством 1, регистрируют устройством регистрации изображений 2. Используя вычислительное устройство 3, определяют зависимость контраста квазипериодического в направлении оси x изменения яркости изображения объекта 5 от 2D координат на изображении. Для вычисления контраста используют известные математические методы обработки изображений. В частности, может быть использован Фурье или вейвлет анализ изображений, интерполяция пространственного распределения изменения яркости изображения периодической или квазипериодической функцией, например, синусоидой или вейвлетом. Также может быть применен известный метод пошагового сдвига фазы полос периодической световой структуры, которая освещает эту поверхность [2, 19]. Сдвиг фазы муаровой структуры, которую проецируют на поверхность объекта 5, осуществляют, например, путем поперечного смещения в направлении оси x проекционного устройства 1 или по п. 23 формулы изобретения путем смещения в направлении оси x одной из установленных в нем решеток. Используя результаты вычисления распределения величины контраста изображения поверхности объекта 5, на который спроецирована ЛМ структура (N,M), находят положение изолинии наибольшего контраста этой ЛМ структуры. Для определения координат заданной точки 13 поверхности объекта 5, изолинию наибольшего контраста проекции 4 ЛМ структуры совмещают с этой точкой. Это осуществляют, в частности, следующими способами:
, то проекция 4 ЛМ структуры на поверхность объекта 5 имеет вид области или нескольких областей, в пределах которых наблюдаются квазипериодические по координате x светлые и темные полосы (см. фиг. 1). Форма области на поверхности объекта 5, где проекция 4 ЛМ структуры имеет относительно высокий контраст, зависит от формы поверхности объекта 5 и глубины резкости муаровой структуры (N,M). Плоскость , где контраст муаровой структуры (N,M) является наибольшим, пересекается с поверхностью объекта 5 по плоской линии, которую будем называть изолинией наибольшего контраста ЛМ структуры. Например, с плоскими поверхностями плоскость пересекается по отрезкам прямых линий (они показаны штрих-пунктирными линиями 14 на фиг. 1), со сферическими поверхностями – по кругу или по дуге окружности. Изображение поверхности объекта 5, освещаемой проекционным устройством 1, регистрируют устройством регистрации изображений 2. Используя вычислительное устройство 3, определяют зависимость контраста квазипериодического в направлении оси x изменения яркости изображения объекта 5 от 2D координат на изображении. Для вычисления контраста используют известные математические методы обработки изображений. В частности, может быть использован Фурье или вейвлет анализ изображений, интерполяция пространственного распределения изменения яркости изображения периодической или квазипериодической функцией, например, синусоидой или вейвлетом. Также может быть применен известный метод пошагового сдвига фазы полос периодической световой структуры, которая освещает эту поверхность [2, 19]. Сдвиг фазы муаровой структуры, которую проецируют на поверхность объекта 5, осуществляют, например, путем поперечного смещения в направлении оси x проекционного устройства 1 или по п. 23 формулы изобретения путем смещения в направлении оси x одной из установленных в нем решеток. Используя результаты вычисления распределения величины контраста изображения поверхности объекта 5, на который спроецирована ЛМ структура (N,M), находят положение изолинии наибольшего контраста этой ЛМ структуры. Для определения координат заданной точки 13 поверхности объекта 5, изолинию наибольшего контраста проекции 4 ЛМ структуры совмещают с этой точкой. Это осуществляют, в частности, следующими способами:
1. Путем изменения расстояния между проекционным устройством 1 и объектом 5, например, путем поступательного перемещения проекционного устройства 1 в продольном направлении (п. 8 формулы изобретения).
2. Путем поворота проекционного устройства 1 и/или объекта 5 (п. 9 формулы изобретения).
3. Изменяя расстояние  от проекционного устройства 1 до плоскости наибольшего контраста муаровой структуры (п. 10 формулы изобретения), например, путем изменения расстояния между решетками 7 и 8 (см. п. 11 формулы изобретения) или пространственного периода по меньшей мере одной из них (см. п. 12 формулы изобретения).
от проекционного устройства 1 до плоскости наибольшего контраста муаровой структуры (п. 10 формулы изобретения), например, путем изменения расстояния между решетками 7 и 8 (см. п. 11 формулы изобретения) или пространственного периода по меньшей мере одной из них (см. п. 12 формулы изобретения).
Можно использовать комбинацию двух или трех указанных выше методов перемещения проекции 4 ЛМ структуры и изолинии ее наибольшего контраста по объекту 5. Перемещение осуществляют до тех пор, пока изолиния наибольшего контраста не пройдет через заданную точку 13 поверхности объекта 5. Расстояние в продольном направлении  от плоскости второй решетки 8 проекционного устройства 1 до изолинии наибольшего контраста ЛМ структуры (N,M) вычисляют по формуле (1). Продольная координата заданной точки 13 в системе координат, связанной с проекционным устройством 1, равна
от плоскости второй решетки 8 проекционного устройства 1 до изолинии наибольшего контраста ЛМ структуры (N,M) вычисляют по формуле (1). Продольная координата заданной точки 13 в системе координат, связанной с проекционным устройством 1, равна  . При этом положении изолиния наибольшего контраста ЛМ структуры определяют поперечные координаты точки 13, используя измеренные значения координат этой точки на изображении поверхности объекта 5 и результаты калибровки устройства регистрации изображений 2 [19, 49]. В удобном и простом для обработки частном случае, когда, во-первых, согласно п. 24 формулы изобретения, оптическая ось устройства регистрации изображений 2 параллельна оптической оси проекционного устройства 1 и, во-вторых, координаты объектива 12 устройства регистрации изображений 2 в системе координат, связанной с проекционным устройством 1, фиксированы и равны
. При этом положении изолиния наибольшего контраста ЛМ структуры определяют поперечные координаты точки 13, используя измеренные значения координат этой точки на изображении поверхности объекта 5 и результаты калибровки устройства регистрации изображений 2 [19, 49]. В удобном и простом для обработки частном случае, когда, во-первых, согласно п. 24 формулы изобретения, оптическая ось устройства регистрации изображений 2 параллельна оптической оси проекционного устройства 1 и, во-вторых, координаты объектива 12 устройства регистрации изображений 2 в системе координат, связанной с проекционным устройством 1, фиксированы и равны  ,
,  ,
,  (см. фиг. 1 и фиг. 3), тогда координаты x и y точек на поверхности объекта 5, принадлежащих в плоскости , вычисляют по формулам
(см. фиг. 1 и фиг. 3), тогда координаты x и y точек на поверхности объекта 5, принадлежащих в плоскости , вычисляют по формулам

где  - фокальное расстояние объектива 12 устройства регистрации изображений 2,
- фокальное расстояние объектива 12 устройства регистрации изображений 2,  и
и  - координаты изображений этих точек на поверхности датчика изображений 11,
- координаты изображений этих точек на поверхности датчика изображений 11,  - расстояние от объектива 12 устройства регистрации изображений 2 до плоскости , которое равно
- расстояние от объектива 12 устройства регистрации изображений 2 до плоскости , которое равно  (см. фиг. 3). Координаты заданной точки 13 на поверхности объекта 5 в глобальной системе координат , , определяют, с помощью вычислительного устройства 3, на основании полученные данных об ее координатах в системе координат x, y и z, связанной с проекционным устройством 1, а также данных о положении и ориентации проекционного устройства 1 в глобальной системе координат.
(см. фиг. 3). Координаты заданной точки 13 на поверхности объекта 5 в глобальной системе координат , , определяют, с помощью вычислительного устройства 3, на основании полученные данных об ее координатах в системе координат x, y и z, связанной с проекционным устройством 1, а также данных о положении и ориентации проекционного устройства 1 в глобальной системе координат.
Особенность предлагаемого способа в частном случае его реализации для измерения формы объекта состоит в том, что изолинию наибольшего контраста проекции 4 по меньшей мере одной ЛМ структуры перемещают по всей контролируемой или доступной для измерения части поверхности объекта 5. При каждом положении проекции 4 ЛМ структуры изображение поверхности объекта 5 регистрируют устройством регистрации изображений 2. Обработку полученных изображений и управление перемещением проекции 4 ЛМ структуры по поверхности объекта 5 осуществляют с помощью вычислительного устройства 3. Вычислительное устройство 3 путем обработки изображений поверхности объекта 5, полученных устройством регистрации 2 при разных положениях проекции 4 ЛМ структуры, определяет продольные и поперечные координаты множества точек контролируемой части поверхности объекта 5. Определение координат каждой из множества точек поверхности объекта 5 производится также как в описанном выше частном случае реализации способа для измерения координат одной заданной точки 13 объекта. Для уменьшения времени измерения, а также времени и трудоемкости обработки их результатов по п. 13 формулы изобретения предпочтительно, чтобы при каждом положении проекции 4 ЛМ структуры на поверхности объекта 5 определялись и запоминались вычислительным устройством координаты множества точек поверхности объекта 5, находящихся на изолинии наибольшего контраста этой ЛМ структуры. Предлагаемый способ позволяет измерять форму негладких поверхностей, поверхностей с разрывами и резкими изменениями высоты, форму и расстояния до нескольких объектов, не затеняющих друг друга от света проекционного устройства.
Рассмотрим применение способа для измерения формы части поверхности объекта 5 на примере, когда сканирование проекции 4 ЛМ структуры по поверхности объекта 5 осуществляется путем поступательного перемещения проекционного устройства 1 в продольном направлении навстречу объекту 5. Предпочтительно вначале совместить изолинию наибольшего контраста ЛМ структуры с областью объекта 5, ближайшей в продольном направлении к проекционному устройству 1. Проекционное устройство 1 с помощью устройства перемещения 10 пошагово приближают в продольном направлении к объекту 5. При каждом шаге расстояние в продольном направлении между проекционным устройством 1 и объектом 5 уменьшают на фиксированную величину  , значение которой меньше , например,
, значение которой меньше , например,  . При этом изолиния наибольшего контраста проекции 4 муаровой структуры также перемещается по поверхности объекта. Расстояние
. При этом изолиния наибольшего контраста проекции 4 муаровой структуры также перемещается по поверхности объекта. Расстояние  от ближней к проектору области объекта 5 до плоскости наибольшего контраста муаровой структуры при перемещении на
от ближней к проектору области объекта 5 до плоскости наибольшего контраста муаровой структуры при перемещении на  шагов будет равно
шагов будет равно  . Сближение проекционного устройства 1 и объекта 5 также может быть непрерывным с постоянной скоростью
. Сближение проекционного устройства 1 и объекта 5 также может быть непрерывным с постоянной скоростью  , при этом время регистрации одного изображения должно быть много меньше величины
, при этом время регистрации одного изображения должно быть много меньше величины  . В этом случае вычисляют по формуле
. В этом случае вычисляют по формуле  , где
, где  - время,
- время,  - момент времени, когда изолиния наибольшего контраста совпадала с ближайшей к проектору областью объекта. Изображение поверхности объекта 5 на каждом шаге или в последовательные моменты времени регистрируют устройством регистрации изображений 2. Путем обработки вычислительным устройством 3 изображения, полученного устройством регистрации 2 на шаге или в момент времени , определяют поперечные координаты x и y точек поверхности объекта 5, расположенных на изолинии наибольшего контраста проекции ЛМ структуры при этом значении . Обрабатывая изображения поверхности объекта 5, которые были зарегистрированы при разном расстоянии в продольном направлении от проекционного устройства 1 до объекта 5, рассчитывают изолинии
- момент времени, когда изолиния наибольшего контраста совпадала с ближайшей к проектору областью объекта. Изображение поверхности объекта 5 на каждом шаге или в последовательные моменты времени регистрируют устройством регистрации изображений 2. Путем обработки вычислительным устройством 3 изображения, полученного устройством регистрации 2 на шаге или в момент времени , определяют поперечные координаты x и y точек поверхности объекта 5, расположенных на изолинии наибольшего контраста проекции ЛМ структуры при этом значении . Обрабатывая изображения поверхности объекта 5, которые были зарегистрированы при разном расстоянии в продольном направлении от проекционного устройства 1 до объекта 5, рассчитывают изолинии  для разных значений , и на основании этих данных вычисляют форму поверхности объекта
для разных значений , и на основании этих данных вычисляют форму поверхности объекта  .
.
Использование нескольких ЛМ структур с разными индексами (N, M), формируемых по п. 7 формулы изобретения одним проекционным устройством, позволяет расширить диапазон измерений расстояний и координат, а также уменьшить время, необходимое для измерения формы поверхности объекта. Осуществление способа с использованием нескольких муаровых структур будет аналогичным описанному выше осуществлению способа в случае одной ЛМ структуры. В случае использования нескольких ЛМ структур предпочтительно использовать несколько устройств регистрации изображений, каждое из которых сфокусировано на плоскость наибольшего контраста одной из ЛМ структур. В том случае, когда на поверхность объекта проецируют сразу несколько ЛМ структур или одну ЛМ структуру, индекс которой (N,M) заранее неизвестен, нужно различать изображения проекций муаровых структур с разным индексами (N,M) или определять значения индексов (N,M) по изображению, которое регистрируется устройством регистрации изображений. Изображения проекций муаровых структур с разными индексами (N,M) можно различать, например, по их периодам, по величине их контраста, по порядку расположения в продольном направлении.
Размер области поверхности объекта 5, в пределах которой измеряется его форма, можно увеличить, если после сканирования доступной для измерений части поверхности объект 5 повернуть на известный угол, например, вокруг оси, перпендикулярной оси z. Это позволит осветить проекционным устройством 1 недоступный ранее участок поверхности объекта 5 и затем просканировать его, по меньшей мере, одной ЛМ структурой 4. Также можно увеличить размер области поверхности объекта 5, в пределах которой измеряется его форма, если, после измерения профиля одной части объекта, переместить проектор 1 и, при необходимости, устройства регистрации изображений вокруг объекта, и затем просканировать, по меньшей мере, одной ЛМ структурой другую часть поверхности объекта. Размер области поверхности объекта, доступной для измерения ее профиля, а также скорость таких измерений можно увеличить, если использовать несколько проекционных устройств и несколько устройств регистрации изображений (см. фиг. 6). Сканирование поверхности объекта ЛМ структурами, формируемыми каждым из проекционных устройств, осуществляется, например, путем поступательного перемещения проекционных устройств в их продольном направлении, или путем изменения расстояния между решетками в проекционных устройствах и/или путем вращения объекта с помощью поворотного стола 15. Предпочтительно, чтобы области поверхности объекта, доступные для наблюдения устройствами регистрации изображений, перекрывались. С помощью вычислительного устройства 3 рассчитываются, как это описано выше, профили разных участков поверхности объекта, и затем они могут быть объединены известными методами в единую панорамную 3D картину профиля поверхности объекта.
Ниже дано обоснование того, что с помощью проекционного устройства, частные случаи реализации которого предлагаются в изобретении, могут быть сформированы муаровые структуры, локализованные в продольном направлении, рассмотрено влияния параметров проекционного устройства на количество и характеристики формируемых им муаровых структур, а также дана оценка точности предлагаемого способа дальнометрии и профилометрии.
Обозначим  функцию, которая описывает угловое распределение интенсивности света, излучаемого малыми элементами рабочей поверхности осветителя 6, т.е. описывает их диаграмму направленности, где
функцию, которая описывает угловое распределение интенсивности света, излучаемого малыми элементами рабочей поверхности осветителя 6, т.е. описывает их диаграмму направленности, где  - угол между направлением, в котором распространяется световая волна и плоскостью x = const,
- угол между направлением, в котором распространяется световая волна и плоскостью x = const,  - угол между направлением световой волны и плоскостью
- угол между направлением световой волны и плоскостью  .
.
Для простоты или определенности будем полагать, что
рабочая поверхности осветителя 6 является пространственно однородной, т.е. его светимость, а также угловой и частотный спектр света, излучаемого ее элементами, постоянны в пределах рабочей апертуры поверхности осветителя;
ширина углового распределения интенсивности света, излучаемого элементами рабочей поверхности осветителя 6 в плоскости x = const много меньше ширины углового распределения света в плоскости , и, следовательно  . В таком случае угол - это угол между направлением, в котором распространяется свет, и продольным направлением (см. фиг. 3 и 4). Такое угловое распределение интенсивности диффузного света можно сформировать, например, если рабочая поверхность осветителя 6 является одномерным случайный фазовым транспарантом, на который с противоположной от решеток стороны падает плоская волна некогерентного света, причем 1D полосы, вдоль которых оптическая длина пути света через транспарант постоянна, направлены параллельно оси y. Полуширину в плоскости углового спектра света, излучаемого рабочей поверхностью осветителя 6, по уровню
. В таком случае угол - это угол между направлением, в котором распространяется свет, и продольным направлением (см. фиг. 3 и 4). Такое угловое распределение интенсивности диффузного света можно сформировать, например, если рабочая поверхность осветителя 6 является одномерным случайный фазовым транспарантом, на который с противоположной от решеток стороны падает плоская волна некогерентного света, причем 1D полосы, вдоль которых оптическая длина пути света через транспарант постоянна, направлены параллельно оси y. Полуширину в плоскости углового спектра света, излучаемого рабочей поверхностью осветителя 6, по уровню  от максимальной величины функции
от максимальной величины функции  обозначим
обозначим  ;
;
• по п. 31 формулы изобретения в проекционном устройстве 1 установлены амплитудные решетки 7 и 8;
• по п. 32 формулы изобретения решетки 7 и 8 являются тонкими, т.е. при их прохождении светом, излучаемым осветителем 6, не происходит значительного сужения его углового спектра, например, уменьшение ширины углового спектра света не превышает 20%;
• по п. 33 формулы изобретения рабочая поверхность осветителя 6 имеет форму прямоугольника, плоскость которого параллельна плоскостям решеток 7 и 8, а его стороны параллельны осям x и y (фиг. 2). Ширина рабочей апертуры осветителя 6 равна  (см. фиг. 3 и фиг. 4), ее высота равна
(см. фиг. 3 и фиг. 4), ее высота равна  (см. фиг. 2);
(см. фиг. 2);
• решетки 7 и 8 имеют форму прямоугольников, стороны которых параллельны осям x и y. Ширины рабочей апертуры решеток 7 и 8 равны  и
и  соответственно (см. фиг. 3 и фиг. 4), а высоты равна
соответственно (см. фиг. 3 и фиг. 4), а высоты равна  и
и  соответственно (см. фиг. 2). Центры рабочей поверхности осветителя 6, а также первой решетки 7 и второй решетки 8 расположены на оптической оси проекционного устройства, т.е. центры этих элементов проекционного устройства 1 имеют поперечные координаты x = 0,
соответственно (см. фиг. 2). Центры рабочей поверхности осветителя 6, а также первой решетки 7 и второй решетки 8 расположены на оптической оси проекционного устройства, т.е. центры этих элементов проекционного устройства 1 имеют поперечные координаты x = 0,  ;
;
• поперечные размеры рабочей апертуры осветителя 6 и решеток 7 и 8 большие настолько, что в области, где формируется ЛМ структура (N,M), влиянием дифракции света на апертурах этих элементов можно пренебречь, что выполняется при условиях  ,
,  ,
,  , где
, где  – меньшая из величин
– меньшая из величин  и
и  ,
,  – меньшая из величин и ,
– меньшая из величин и ,  – меньшая из величин и ,
– меньшая из величин и ,  ; например,
; например,  ,
,  ,
,  ;
;
• ширина решеток 7 и 8 значительно превосходит их периоды  ,
,  ; например
; например  ,
,  .
.
Сначала определим характеристики ЛМ структур, формируемых проекционным устройством 1, в частном случае, когда его параметры и параметры его элементов таковы, что согласно п. 2 формулы изобретения влияние дифракции света на амплитудных решетках 7 и 8 на характеристики ЛМ структур пренебрежимо мало. В этом частном случае для описания характеристик муаровых структур, формируемых двухрешеточным проектором 1, применимо приближение геометрической оптики. В приближении геометрической оптики характеристики муаровых структур не зависят от длины волны света, поэтому в проекционном устройстве в качестве осветителя может быть использован источник как монохроматического, так и немонохроматического света, в частности, источник широкополосного света, например, белого света. Влияние дифракции на решетках 7 и 8 на характеристики ЛМ структуры (N,M) можно не учитывать, если первая и вторая решетка расположены недалеко друг от друга, по п. 34 формулы изобретения расстояние между их плоскостями должно удовлетворять условию

(см. [26, 62, 63]), где длину  вычисляют по формуле
вычисляют по формуле

величина  равна
равна  , где
, где  - центральная длина волны света, излучаемого осветителем,
- центральная длина волны света, излучаемого осветителем,  - полуширина спектра света по длине волны по уровню .
- полуширина спектра света по длине волны по уровню .
В качестве типичного примера рассмотрим свойства и оценим характеристики ЛМ структур, формирующихся в зоне геометрической оптики, в частном случае, когда по п. 35 формулы изобретения в проекционном устройстве 1 используют 1D амплитудные решетки 7 и 8 с синусоидальным пропусканием. Амплитудные коэффициенты пропускания первой решетки 7  и второй решетки 8
и второй решетки 8  задаются соответственно формулами
задаются соответственно формулами

где  ,
,  - глубина модуляции,
- глубина модуляции,  ,
,  - волновое число,
- волновое число,  ,
,  - фаза амплитудного коэффициента пропускания первой решетки 7 и второй решетки 8 соответственно. Считаем, что решетки 7 и 8 по периметру с внешней стороны окружены непрозрачными оправами (на фигурах не показаны), поэтому коэффициент пропускания первой решетки 7
- фаза амплитудного коэффициента пропускания первой решетки 7 и второй решетки 8 соответственно. Считаем, что решетки 7 и 8 по периметру с внешней стороны окружены непрозрачными оправами (на фигурах не показаны), поэтому коэффициент пропускания первой решетки 7  равен нулю при
равен нулю при  или
или  , и коэффициент пропускания второй решетки 8
, и коэффициент пропускания второй решетки 8  равен нулю при
равен нулю при  или
или  . С помощью проекционного устройства с двумя 1D амплитудными решетками с синусоидальным пропусканием можно сформировать не больше четырех муаровых структур (действительных псевдоизображений решетки)
. С помощью проекционного устройства с двумя 1D амплитудными решетками с синусоидальным пропусканием можно сформировать не больше четырех муаровых структур (действительных псевдоизображений решетки)  ,
,  [65]. Четыре муаровые структуры (N,M), а именно (1,2), (1,1), (2,2) и (2,1), возникают, если
[65]. Четыре муаровые структуры (N,M), а именно (1,2), (1,1), (2,2) и (2,1), возникают, если  . Они расположены в окрестности трех плоскостей, которые удалены от второй решетки 8 на расстояния
. Они расположены в окрестности трех плоскостей, которые удалены от второй решетки 8 на расстояния  , которые вычисляются по формуле (1). Как следует из формулы (1),
, которые вычисляются по формуле (1). Как следует из формулы (1),  . Пространственные периоды муаровых структур (1,2), (1,1), (2,2) и (2,1) вычисляются по формуле (2). Между величинами периодов этих муаровых структур имеется следующее соотношение:
. Пространственные периоды муаровых структур (1,2), (1,1), (2,2) и (2,1) вычисляются по формуле (2). Между величинами периодов этих муаровых структур имеется следующее соотношение:  . Фазы муаровых структур (1,2) (1,1) (2,2) и (2,1) равны соответственно
. Фазы муаровых структур (1,2) (1,1) (2,2) и (2,1) равны соответственно  ,
,  ,
,  ,
,  . Если
. Если  , то проекционным устройством формируются три муаровые структуры, а муаровая структура (2,1) не возникает. При
, то проекционным устройством формируются три муаровые структуры, а муаровая структура (2,1) не возникает. При  возникает только одна муаровая структура (1,2). При
возникает только одна муаровая структура (1,2). При  муаровых структур не возникает.
муаровых структур не возникает.
Если ЛМ структура (N,M) возникает достаточно далеко от проекционного устройства 1, то вблизи области ее локализации уже нет полос света и тени от решеток 7 и 8. В частности, при  и
и  , полосы светотени от решеток в области локализации муаровой структуры (N,M) имеют малый контраст, например, он меньше 0,1, если выполняются условия
, полосы светотени от решеток в области локализации муаровой структуры (N,M) имеют малый контраст, например, он меньше 0,1, если выполняются условия  ,
,  и
и  . В важном для многих потенциальных приложений способа случае, когда
. В важном для многих потенциальных приложений способа случае, когда  , муаровые структуры с разными индексами (N,M), формируемые проекционным устройством с двумя 1D амплитудными решетками с синусоидальным пропусканием, почти не перекрываются в пространстве. Исключение составляют муаровые структуры (1,1) и (2,2), которые расположены вблизи одной плоскости
, муаровые структуры с разными индексами (N,M), формируемые проекционным устройством с двумя 1D амплитудными решетками с синусоидальным пропусканием, почти не перекрываются в пространстве. Исключение составляют муаровые структуры (1,1) и (2,2), которые расположены вблизи одной плоскости  , где
, где  . В окрестности этой плоскости интенсивность света равна
. В окрестности этой плоскости интенсивность света равна

(см. [65]), где  - это интенсивность некогерентного света, падающего на первую решетку 7. В окрестности плоскостей
- это интенсивность некогерентного света, падающего на первую решетку 7. В окрестности плоскостей  и
и  , где соответственно локализована муаровая структура (1,2) и (2,1), интенсивность света вычисляют по формуле
, где соответственно локализована муаровая структура (1,2) и (2,1), интенсивность света вычисляют по формуле

(см. [65]), где нижний индекс NM имеет значение 12 и 21 для муаровой структуры (1,2) и (2,1) соответственно,  . Для всех муаровых структур (N,M) величина контраста
. Для всех муаровых структур (N,M) величина контраста  , если
, если  , и
, и  , если
, если  . Контраст муаровых структур (N,M) зависит от продольной координаты z, и эта зависимость описывается формулой
. Контраст муаровых структур (N,M) зависит от продольной координаты z, и эта зависимость описывается формулой

где  - значение контраста муаровой структуры (N,M) в плоскости . Муаровая структура (1,1) является самой контрастной из четырех. В зоне ГО при
- значение контраста муаровой структуры (N,M) в плоскости . Муаровая структура (1,1) является самой контрастной из четырех. В зоне ГО при  и
и  = 1 ее контраст в плоскости равен
= 1 ее контраст в плоскости равен  = 8/9 [56]. Контраст муаровой структуры (2,2) самый малый, в плоскости он равен
= 8/9 [56]. Контраст муаровой структуры (2,2) самый малый, в плоскости он равен  = 1/18. Максимальный контраст муаровых структур (1,2) и (2,1) в зоне ГО при = 1 равен
= 1/18. Максимальный контраст муаровых структур (1,2) и (2,1) в зоне ГО при = 1 равен  = 2/9 [65]. Функции
= 2/9 [65]. Функции  описывает зависимость контраста муаровой структуры (N,M) от продольной координаты z. Ее значение при максимально и равно 1, т.е.
описывает зависимость контраста муаровой структуры (N,M) от продольной координаты z. Ее значение при максимально и равно 1, т.е.  . Функция убывает до 0 при удалении от плоскости как в сторону проекционного устройства, так и от него. Глубина резкости
. Функция убывает до 0 при удалении от плоскости как в сторону проекционного устройства, так и от него. Глубина резкости  муаровой структуры (N,M) равна ширине по полувысоте (FWHM) функции
муаровой структуры (N,M) равна ширине по полувысоте (FWHM) функции  , где
, где  .
.
Оценим глубину резкости муаровой структуры (N,M), которая формируется проекционным устройством 1 в некоторых частных случаях его реализации. Будем считать, что ограничивающие первую и вторую решетку оправы не виньетируют осветитель в направлении координаты x при его наблюдении из точки ,  и (см. фиг. 3 и 4). Это условие выполняется, например, если ширина рабочей апертуры решеток 7 и 8 больше или равна ширине рабочей апертуры осветителя 6
и (см. фиг. 3 и 4). Это условие выполняется, например, если ширина рабочей апертуры решеток 7 и 8 больше или равна ширине рабочей апертуры осветителя 6

Угловой размер половины рабочей апертуры источника света 6 в плоскости при наблюдении из точки с координатами , и обозначим  (см. фиг. 3 и 4). Он равен
(см. фиг. 3 и 4). Он равен  , где . Из формулы (11) следует, что угловой размер первой и второй решеток в плоскости больше, чем угловой размер осветителя, где упомянутые угловые размеры осветителя и решеток определяются из точки , и . В частном случае, когда угловой размер осветителя меньше ширины углового спектра излучаемого им света (см. фиг. 4(а)), т.е.
, где . Из формулы (11) следует, что угловой размер первой и второй решеток в плоскости больше, чем угловой размер осветителя, где упомянутые угловые размеры осветителя и решеток определяются из точки , и . В частном случае, когда угловой размер осветителя меньше ширины углового спектра излучаемого им света (см. фиг. 4(а)), т.е.  , а также когда яркость осветителя не зависит от угла при
, а также когда яркость осветителя не зависит от угла при  , функция вблизи плоскости при
, функция вблизи плоскости при  равна
равна

где  (см. [39, 67 - 69]). Из формулы (12) следует, что глубину резкости муаровой структуры (N,M) вблизи плоскости можно вычислить по формуле
(см. [39, 67 - 69]). Из формулы (12) следует, что глубину резкости муаровой структуры (N,M) вблизи плоскости можно вычислить по формуле

Муаровая структура (N,M) при  является сильно локализованной
является сильно локализованной  , если выполняется условие
, если выполняется условие

Из формулы (13) следует, что глубина резкости муаровой структуры (N,M) меньше четверти расстояния  при
при  . При муаровая структура (N,M) является локализованной (
. При муаровая структура (N,M) является локализованной ( ), если
), если  . Например, при и
. Например, при и  муаровая структура (1,1) будет локализованной, если ширина рабочей апертуры осветителя
муаровая структура (1,1) будет локализованной, если ширина рабочей апертуры осветителя  больше
больше  .
.
В противоположном случае, когда по п. 36 формулы изобретения угловой размер рабочей апертуры осветителя 6 в плоскости при наблюдении из точки с координатами , и больше ширины углового спектра света, излучаемого элементами поверхности осветителя 6,  (см. фиг. 4 (б)), глубину резкости муаровой структуры (N,M) вблизи плоскости при
(см. фиг. 4 (б)), глубину резкости муаровой структуры (N,M) вблизи плоскости при  можно оценить по формуле
можно оценить по формуле

Относительную глубину резкости муаровой структуры (N,M) при вычисляют по формуле

Муаровая структура (N,M) при является локализованной  , если выполняется условие
, если выполняется условие

в частности, при  . Из неравенства (17) и условия , которое можно записать в виде
. Из неравенства (17) и условия , которое можно записать в виде  , опять следует необходимое условие (14)
, опять следует необходимое условие (14)  , при выполнении которого муаровая структура будет локализованной. В частности, при
, при выполнении которого муаровая структура будет локализованной. В частности, при  . Таким образом, для того, чтобы проекционным устройством 1, в котором установлены первая и вторая решетки с угловыми размерами в плоскости больше, чем угловой размер рабочей апертуры осветителя, формировалась локализованная муаровая структура (N,M), в этом проекционном устройстве по п. 37 формулы изобретения нужно использовать осветитель 6, у которого тангенс углового размера в плоскости половины рабочей апертуры, равный
. Таким образом, для того, чтобы проекционным устройством 1, в котором установлены первая и вторая решетки с угловыми размерами в плоскости больше, чем угловой размер рабочей апертуры осветителя, формировалась локализованная муаровая структура (N,M), в этом проекционном устройстве по п. 37 формулы изобретения нужно использовать осветитель 6, у которого тангенс углового размера в плоскости половины рабочей апертуры, равный  , а также тангенс полуширины в этой плоскости углового спектра излучаемого им света более чем в пять раз превышают отношение
, а также тангенс полуширины в этой плоскости углового спектра излучаемого им света более чем в пять раз превышают отношение  .
.
В частном случае реализации проекционного устройства 1, когда полуширина углового спектра света, испускаемого элементами поверхности осветителя, равна  , и ширина рабочей апертуры осветителя превосходит расстояние от нее до плоскости наибольшего контраста муаровой структуры (N,M) более, чем в два раза
, и ширина рабочей апертуры осветителя превосходит расстояние от нее до плоскости наибольшего контраста муаровой структуры (N,M) более, чем в два раза  , т.е.
, т.е.  , из формулы (15) следует, что глубина резкости муаровой структуры примерно равна
, из формулы (15) следует, что глубина резкости муаровой структуры примерно равна  . Из этой оценки , а также формул (1) и (2) следует, что относительная глубина резкости ЛМ структуры (N,M) примерно равна
. Из этой оценки , а также формул (1) и (2) следует, что относительная глубина резкости ЛМ структуры (N,M) примерно равна  . Исходя из такой оценки относительной глубины резкости, находим, что при
. Исходя из такой оценки относительной глубины резкости, находим, что при  = 1 мм у муаровой структуры (1,1) в зоне геометрической оптики, где выполняется условие (5), величины
= 1 мм у муаровой структуры (1,1) в зоне геометрической оптики, где выполняется условие (5), величины  может быть порядка процента.
может быть порядка процента.
Ширина муаровой структуры (N,M) в плоскости равна (см. фиг. 4)

Контраст и глубина резкости ЛМ структур зависят от поперечной координаты x. Локализованная муаровая структура (N,M) имеет наибольший контраст и наименьшую глубину резкости вблизи плоскости . В окрестности этой плоскости есть область шириной  (см. фиг. 4), в пределах которой контраст и глубина резкости ЛМ структуры (N,M) не изменяются или изменяются мало, например, меньше, чем в 1,2 раза. Будем называть эту область центральной областью муаровой структуры (N,M). Ширину центральной области можно оценить по формуле (см. фиг. 4 (а, б))
(см. фиг. 4), в пределах которой контраст и глубина резкости ЛМ структуры (N,M) не изменяются или изменяются мало, например, меньше, чем в 1,2 раза. Будем называть эту область центральной областью муаровой структуры (N,M). Ширину центральной области можно оценить по формуле (см. фиг. 4 (а, б))

Для осуществления предлагемого способа дальнометрии и профилометрии предпочтительно, чтобы  .
.
Таким образом, по п. 14 формулы изобретения, если оправы, ограничивающие первую и вторую решетку, не виньетируют осветитель в направлении координаты x при его наблюдении из центральной области этой ЛМ структуры, то при глубину резкости ЛМ структуры (N,M) в области  можно оценить по формулам (13) или (15), которые можно заменить одной обобщенной формулой
можно оценить по формулам (13) или (15), которые можно заменить одной обобщенной формулой

где  - наименьшая из величин
- наименьшая из величин  и
и  .
.
Абсолютная ошибка определения расстояния от проекционного устройства до заданной точки объекта 5 пропорциональна глубине резкости муаровой структуры и обычно не превосходит величины . Для дальнометрии и профилометрии предпочтительно использовать ЛМ структуры с малой глубина резкости, например, по п. 15 формулы изобретения предлагается использовать ЛМ структуры, у которых в центральной области относительная глубина резкости меньше трех процентов. Для увеличения точности и уменьшения времени измерения целесообразно оптимизировать характеристики ЛМ структуры, проецируемой на поверхность объекта 5, в частности, выбрать оптимальный период ЛМ структуры, ее глубину резкости и направление полос. В случае (см. фиг. 4(б)), увеличивая ширину источника света, а также ширину решеток, как следует из формул (11) и (19), можно практически неограниченно увеличивать ширину центральной области , в пределах которой точность измерения расстояния до точек объекта и его формы будет примерно такой же, как в центре ЛМ структуры  . Таким образом, предлагаемые в изобретении способ и система позволяют осуществлять широкопольную дальнометрию и профилометрию.
. Таким образом, предлагаемые в изобретении способ и система позволяют осуществлять широкопольную дальнометрию и профилометрию.
Приведем первый численный пример, в котором определим характеристики муаровых структур, формируемых в зоне геометрической оптики проекционным устройством 1 с тонкими амплитудными решетками 7 и 8. Полагаем, что в проекционном устройстве установлены первая и вторая решетки с синусоидальным пропусканием с периодами = 2 мм и  = 1 мм соответственно. Глубина модуляции функции пропускания этих решеток равна
= 1 мм соответственно. Глубина модуляции функции пропускания этих решеток равна  = 1. Расстояние между первой решеткой 7 и второй решеткой 8 равно
= 1. Расстояние между первой решеткой 7 и второй решеткой 8 равно  = 20 см. Осветитель 6 расположен вплотную к первой решетке
= 20 см. Осветитель 6 расположен вплотную к первой решетке  = 0. Источник света 6, первая и вторая решетки имеют равную ширину
= 0. Источник света 6, первая и вторая решетки имеют равную ширину  = 100 см. Осветитель 6 излучает диффузный свет в диапазоне
= 100 см. Осветитель 6 излучает диффузный свет в диапазоне  мкм. Полуширина углового спектра света, излучаемого малыми некогерентными элементами поверхности осветителя,
мкм. Полуширина углового спектра света, излучаемого малыми некогерентными элементами поверхности осветителя,  равна 30о. Проекционным устройством 1 с такими параметрами формируются две муаровые структуры с контрастом более 0,2: это муаровые структуры (1,1) и (1,2). Муаровая структура (2,1) не возникает, т.к.
равна 30о. Проекционным устройством 1 с такими параметрами формируются две муаровые структуры с контрастом более 0,2: это муаровые структуры (1,1) и (1,2). Муаровая структура (2,1) не возникает, т.к.  . Расстояния между решетками меньше, чем расстояние
. Расстояния между решетками меньше, чем расстояние  равное 33 см, поэтому влиянием дифракции света на характеристики муаровых структур (1,1) и (1,2) можно пренебречь. Пространственный период муаровой структуры (1,1) равен
равное 33 см, поэтому влиянием дифракции света на характеристики муаровых структур (1,1) и (1,2) можно пренебречь. Пространственный период муаровой структуры (1,1) равен  = 2 мм. Эта муаровая структура будет иметь наибольший контраст в плоскости, удаленной от второй решетки на расстояние
= 2 мм. Эта муаровая структура будет иметь наибольший контраст в плоскости, удаленной от второй решетки на расстояние  = 20 см. Максимальная величина ее контраста примерно равна
= 20 см. Максимальная величина ее контраста примерно равна  ≈ 0,9. Ширина центральной области ЛМ структуры (1,1) равна
≈ 0,9. Ширина центральной области ЛМ структуры (1,1) равна  54 см. Глубина резкости муаровой структуры (1,1) в ее центральной области равна
54 см. Глубина резкости муаровой структуры (1,1) в ее центральной области равна  2 мм. Муаровая структура (1,2) с пространственным периодом
2 мм. Муаровая структура (1,2) с пространственным периодом  = 0,67 мм локализована вблизи плоскости, удаленной от второй решетки на расстояние
= 0,67 мм локализована вблизи плоскости, удаленной от второй решетки на расстояние  ≈ 6,7 см. Ее максимальный контраст равен примерно
≈ 6,7 см. Ее максимальный контраст равен примерно  = 0,22. Ширина центральной области ЛМ структуры (1,2) равна
= 0,22. Ширина центральной области ЛМ структуры (1,2) равна  69 см. Глубина резкости этой муаровой структуры
69 см. Глубина резкости этой муаровой структуры  в ее центральной области равна
в ее центральной области равна  0,7мм. Относительная глубина резкости муаровых структур (1,1) и (1,2) примерно равна 1%.
0,7мм. Относительная глубина резкости муаровых структур (1,1) и (1,2) примерно равна 1%.
Отметим, что формулы (13), (15), (19) и (20) дают только приблизительную оценку глубины резкости муаровой структуры (N,M) и ширины ее центральной области. Для повышения точности измерений с помощью предлагаемого способа дальнометрии и профилометрии предпочтительно предварительно провести измерения зависимости контраста муаровой структуры (N,M) от продольной координаты z и поперечной координаты x, и на основании данных этих экспериментов определить ошибку измерений расстояния и координат.
В ряде других частных случаев реализации предлагаемой системы дальнометрии и профилометриии в ней используется проекционное устройство 1, в котором установлена по меньшей мере одна амплитудная решетка с периодической несинусоидальной зависимостью коэффициента пропускания от координаты x. C помощью проекционного устройства 1, в котором установлена по меньшей мере одна амплитудная решетка с несинусоидальным пропусканием можно формировать муаровые структуры (N,M), у которых максимальные значения целочисленных индексов N и M не ограничены значением два [27, 64, 66, 70]. Количество муаровых структур, формируемых таким проекционным устройством, может быть больше, чем в частном случае, когда используются две амплитудные решетки с синусоидальным пропусканием. Расстояния от проекционного устройства 1 до плоскости, где контраст этих муаровых структур имеет наибольшее значение, вычисляют по формуле (1), их периоды вычисляют по формуле (2). Величина контраста муаровой структуры (N,M) в плоскости  в зоне ГО определяется, в частности, зависимостью коэффициентов пропускания первой и второй решетки от координаты x. Глубину резкости ЛМ структур можно оценить, используя формулу (20).
в зоне ГО определяется, в частности, зависимостью коэффициентов пропускания первой и второй решетки от координаты x. Глубину резкости ЛМ структур можно оценить, используя формулу (20).
В качестве амплитудной решетки с несинусоидальным пропусканием (п. 27 формулы изобретения) можно использовать периодический бинарный растр (см. фиг. 5 (б)). Коэффициент заполнения бинарного растра равен  , где
, где  - период решетки,
- период решетки,  - ширина ее прозрачных полос, индекс
- ширина ее прозрачных полос, индекс  обозначает номер решетки в проекционном устройстве 1. Амплитудный бинарный растр с
обозначает номер решетки в проекционном устройстве 1. Амплитудный бинарный растр с  также называется решеткой Ронки. В частном случае, когда первая решетка 7 и вторая решетка 8 в проекционном устройстве 1 являются решетками Ронки, в области геометрической оптики могут возникнуть относительно контрастные муаровые структуры (1,1), (1,3) и (3,1). Условие их возникновения -
также называется решеткой Ронки. В частном случае, когда первая решетка 7 и вторая решетка 8 в проекционном устройстве 1 являются решетками Ронки, в области геометрической оптики могут возникнуть относительно контрастные муаровые структуры (1,1), (1,3) и (3,1). Условие их возникновения -  , здесь N и M равны 1 или 3. Наибольший контраст муаровой структуры (1,1) при
, здесь N и M равны 1 или 3. Наибольший контраст муаровой структуры (1,1) при  примерно такой же, как и при использовании двух амплитудных решеток с синусоидальным пропусканием
примерно такой же, как и при использовании двух амплитудных решеток с синусоидальным пропусканием  0,9. Наибольшее значение контраста муаровых структур (1,3) и (3,1) равно примерно 0,3. Остальные муаровые структуры (N,M), формируемые проекционным устройством с двумя решетками Ронки, в зоне геометрической оптики имеют контраст менее 0,2. При использовании в проекционном устройстве по меньшей мере одного бинарного растра с коэффициентом заполнения меньшим, чем у решетки Ронки, т.е.
0,9. Наибольшее значение контраста муаровых структур (1,3) и (3,1) равно примерно 0,3. Остальные муаровые структуры (N,M), формируемые проекционным устройством с двумя решетками Ронки, в зоне геометрической оптики имеют контраст менее 0,2. При использовании в проекционном устройстве по меньшей мере одного бинарного растра с коэффициентом заполнения меньшим, чем у решетки Ронки, т.е.  , число относительно контрастных муаровых структур может быть значительно больше трех. Например, в частном случае, когда в проекционном устройстве первой решеткой является бинарный растр с
, число относительно контрастных муаровых структур может быть значительно больше трех. Например, в частном случае, когда в проекционном устройстве первой решеткой является бинарный растр с  , а второй решеткой является решетка Ронки или решетка с синусоидальным пропусканием при
, а второй решеткой является решетка Ронки или решетка с синусоидальным пропусканием при  будут формироваться контрастные муаровые структуры (1,4), (1,3), (1,2), (1,1), (2,1), (3,1) и (4,1) (с контрастом
будут формироваться контрастные муаровые структуры (1,4), (1,3), (1,2), (1,1), (2,1), (3,1) и (4,1) (с контрастом  ). Как следует из формулы (1),
). Как следует из формулы (1),  .
.
Установка в проекционном устройстве по меньшей мере одной амплитудной решетки с несинусоидальным пропусканием, в ряде случаев позволяет лучше приспособить предлагаемый способ к условиям конкретной задачи дальнометрии и профилометрии. В частности, в случае, когда проекционным устройством формируется большое число относительно контрастных ЛМ структур, например, их число больше трех, есть возможность расширить диапазон и точность, а также уменьшить время измерения расстояний, координат и формы объектов. Достоинством применения проекционного устройства, в котором установлена по меньшей мере одна бинарная решетка, также является возможность управлять характеристиками ЛМ структур, например, их количеством и контрастом, путем изменения периода и/или коэффициента заполнения решетки.
В частном случае (п. 3 формулы изобретения) для осуществления способа дальнометрии и профилометрии используется одна или большее число локализованных муаровых структур, на характеристики которых влияет эффект дифракции света. Схема системы для осуществления способа по п. 3 формулы изобретения такая же как, схема системы для осуществления способа по п. 2 формулы изобретения, когда контролируемые объекты расположены в зоне ГО проекционного устройства. Она приведена на фиг. 1. Отличие состоит в том, что в частном случае осуществления способа по п. 3 формулы изобретения параметры проекционного устройства 1 и его элементов, в частности, типы и периоды решеток 7 и 8, расстояния между ними являются такими, что ЛМ структуры формируются в зоне дифракции Френеля проекционного устройства. В проекционном устройстве, которое применяется для осуществления способа по п. 3 формулы изобретения, в качестве первой и/или второй решетки могут использоваться не только амплитудные решетки, но и по п. 28 формулы изобретения фазовые решетки [69, 71, 72], а также амплитудно-фазовые решетки [55, 56]. Двухрешеточное устройство, которое формирует муаровые структуры (псевдоизображения решетки) в зоне дифракции Френеля, в ряде публикаций называется интерферометром Тальбота-Лау [55, 70, 73]. Некоторые свойства муаровых структур, формируемых двухрешеточным устройством (интерферометром Тальбота-Лау) в зоне дифракции Френеля, рассмотрены в публикациях [28 - 30, 39, 64, 65, 69, 74, 75]. Ширину центральных областей ЛМ структур и их глубину резкости в центральной области в зоне дифракции Френеля можно оценить по формулам (19) и (20). Для достижения относительно высокого контраста муаровых структур, формируемых в зоне дифракции Френеля, вместо условия (5), которое необходимо для применимости приближения ГО, требуется выполнение других условий, которые налагают ограничения на параметры проекционного устройства. В качестве примера определим условия, при которых формируются контрастные ЛМ структуры в зоне дифракции Френеля, в частном случае, когда в проекционном устройстве по п. 35 формулы изобретения используются две амплитудные решетки с синусоидальным пропусканием. Будем считать, что  . В этом случае в окрестности трех плоскостей с координатами ,
. В этом случае в окрестности трех плоскостей с координатами ,  и возникают муаровые структуры (1,2), (1,1), (2,2) и (2,1) соответственно. Как показано в публикациях [27, 30, 32, 64, 65, 75], зависимости контраста ЛМ структуры от расстояния между первой и второй решетками, от ширины частотного спектра света, излучаемого осветителем, качественно различаются для муаровых структур (N,M) с нечетным и четным значением индекса M. По этой причине сначала определим условия формирования контрастных муаровых структур (1,1) и (2,1), у которых M = 1, и затем отдельно условия формирования контрастной муаровой структуры (1,2), у которой M = 2. Контраст муаровой структуры (2,2) мал, поэтому ее учитывать не будем.
и возникают муаровые структуры (1,2), (1,1), (2,2) и (2,1) соответственно. Как показано в публикациях [27, 30, 32, 64, 65, 75], зависимости контраста ЛМ структуры от расстояния между первой и второй решетками, от ширины частотного спектра света, излучаемого осветителем, качественно различаются для муаровых структур (N,M) с нечетным и четным значением индекса M. По этой причине сначала определим условия формирования контрастных муаровых структур (1,1) и (2,1), у которых M = 1, и затем отдельно условия формирования контрастной муаровой структуры (1,2), у которой M = 2. Контраст муаровой структуры (2,2) мал, поэтому ее учитывать не будем.
Контраст муаровых структур (1,1) и (2,1) в области дифракции Френеля зависит, в частности, от расстояния между решетками  и длины
и длины  (см. [32, 33, 65, 67, 68]). Варьируя расстояние между решетками, их периоды, длину волны и ширину спектра света, можно изменять величину максимального контраста муаровых структур (1,1) и (2,1) от малой величины, которая меньше 0,1, до наибольшего значения, которое близко к наибольшему значению их контраста в приближении геометрической оптики, в частности, величина
(см. [32, 33, 65, 67, 68]). Варьируя расстояние между решетками, их периоды, длину волны и ширину спектра света, можно изменять величину максимального контраста муаровых структур (1,1) и (2,1) от малой величины, которая меньше 0,1, до наибольшего значения, которое близко к наибольшему значению их контраста в приближении геометрической оптики, в частности, величина  может быть больше
может быть больше  , где
, где  - контраст муаровой структуры (N,1) в плоскости
- контраст муаровой структуры (N,1) в плоскости  в приближении геометрической оптики, индекс N равен 1 и 2 для муаровых структур (1,1) и (2,1) соответственно. Будем считать, что в проекционном устройстве 1 используется осветитель, который расположен вблизи первой решетки (
в приближении геометрической оптики, индекс N равен 1 и 2 для муаровых структур (1,1) и (2,1) соответственно. Будем считать, что в проекционном устройстве 1 используется осветитель, который расположен вблизи первой решетки ( ) и который излучает монохроматический некогерентный свет с длиной волны , а также выполняется условие
) и который излучает монохроматический некогерентный свет с длиной волны , а также выполняется условие  . В этом случае контраст муаровой структуры (N,1) в плоскости будет иметь величину, которая ненамного меньше величины ее контраста в зоне ГО, если величина
. В этом случае контраст муаровой структуры (N,1) в плоскости будет иметь величину, которая ненамного меньше величины ее контраста в зоне ГО, если величина  по модулю близка к единице (см. [65]). Это требование выполняется при условии
по модулю близка к единице (см. [65]). Это требование выполняется при условии

где  = 0, 1, 2, 3, … . Частный случай = 0 - это случай, когда величина
= 0, 1, 2, 3, … . Частный случай = 0 - это случай, когда величина  мала (например,
мала (например, ); он соответствует приближению геометрической оптики для описания характеристик ЛМ структур. При
); он соответствует приближению геометрической оптики для описания характеристик ЛМ структур. При  1, т.е. в зоне Френеля проекционного устройства, контраст муаровых структур (1,1) и (2,1) в плоскостях будет превышать соответственно
1, т.е. в зоне Френеля проекционного устройства, контраст муаровых структур (1,1) и (2,1) в плоскостях будет превышать соответственно  и
и  , если расстояние между решетками изменяется в пределах интервалов
, если расстояние между решетками изменяется в пределах интервалов  до
до  (см. [65]). Контраст муаровых структур (1,1) и (2,1), формируемых проекционным устройством 1 в зоне дифракции Френеля, при освещении решеток 7 и 8 немонохроматическим светом будет меньше, чем их контраст в случае, когда решетки освещаются монохроматическим светом. Уменьшение контраста муаровых структур будет не очень значительным, если излучаемый осветителем свет имеет полуширину спектра по длине волны, ограниченную условием
(см. [65]). Контраст муаровых структур (1,1) и (2,1), формируемых проекционным устройством 1 в зоне дифракции Френеля, при освещении решеток 7 и 8 немонохроматическим светом будет меньше, чем их контраст в случае, когда решетки освещаются монохроматическим светом. Уменьшение контраста муаровых структур будет не очень значительным, если излучаемый осветителем свет имеет полуширину спектра по длине волны, ограниченную условием  , например, в случае
, например, в случае  меньше
меньше  уменьшение контраста по сравнению с
уменьшение контраста по сравнению с  будет не более, чем в два раза [64, 67], здесь
будет не более, чем в два раза [64, 67], здесь  = 1, 2, 3, … . Из этой оценки следует, что при расстоянии между решетками 7 и 8 меньше
= 1, 2, 3, … . Из этой оценки следует, что при расстоянии между решетками 7 и 8 меньше  муаровые структуры (1,1) и (2,1) с контрастом
муаровые структуры (1,1) и (2,1) с контрастом  могут формироваться при освещении решеток немонохроматическим светом с шириной спектра несколько десятых долей .
могут формироваться при освещении решеток немонохроматическим светом с шириной спектра несколько десятых долей .
Таким образом, если для дальнометрии и профилометрии в зоне дифракции Френеля проекционного устройства используется ЛМ структура (1,1), то согласно п. 38 формулы изобретения предпочтительно, чтобы расстояние между установленными в проекционном устройстве амплитудными решетками с синусоидальным пропусканием было в пределах диапазонов от  до
до  , а установленный в проекционном устройстве осветитель излучал свет с полушириной спектра по длине волны
, а установленный в проекционном устройстве осветитель излучал свет с полушириной спектра по длине волны  меньше, чем
меньше, чем  . При использовании ЛМ структуры (2,1) согласно п. 39 формулы изобретения предпочтительно, чтобы расстояние между первой и второй амплитудными решетками с синусоидальным пропусканием было в пределах диапазонов от
. При использовании ЛМ структуры (2,1) согласно п. 39 формулы изобретения предпочтительно, чтобы расстояние между первой и второй амплитудными решетками с синусоидальным пропусканием было в пределах диапазонов от  до
до  , а осветитель излучал свет с полушириной спектра по длине волны меньше, чем .
, а осветитель излучал свет с полушириной спектра по длине волны меньше, чем .
Наибольшая величина контраста муаровой структуры (1,2), в отличие от муаровых структур (1,1) и (2,1), слабо зависит от расстояния между решетками 7 и 8 и их периодов, а также длины волны и ширины спектра света, излучаемого осветителем [65]. В частном случае, когда полуширина углового спектра света, излучаемого осветителем, меньше 30о и источник света расположен близко к первой решетке  , (например,
, (например,  ) величина контраста муаровой структуры (1,2) в плоскости
) величина контраста муаровой структуры (1,2) в плоскости  будет от 0,21 до 0,25 при произвольных значениях ширины частотного спектра света, излучаемого осветителем, а также расстояния между решетками и их периодов [65].
будет от 0,21 до 0,25 при произвольных значениях ширины частотного спектра света, излучаемого осветителем, а также расстояния между решетками и их периодов [65].
Во втором численном примере определим характеристики муаровых структур, формируемых в зоне дифракции Френеля проекционным устройством 1 с двумя амплитудными решетками с синусоидальным пропусканием. Полагаем, что период первой решетки 7 равен  0,5 мм, период второй решетки 8 равен = 0,25 мм,
0,5 мм, период второй решетки 8 равен = 0,25 мм,  . Обе решетки являются тонкими. Центральная длина волны света, излучаемого осветителем 6, равна = 0,5 мкм, полуширина спектра света
. Обе решетки являются тонкими. Центральная длина волны света, излучаемого осветителем 6, равна = 0,5 мкм, полуширина спектра света  равна 0,1 мкм. Полуширина углового спектра света, излучаемого элементами поверхности осветителя 6, равна
равна 0,1 мкм. Полуширина углового спектра света, излучаемого элементами поверхности осветителя 6, равна  = 20o. Осветитель 6 расположен вплотную к первой решетке = 0. Источник света 6 и решетки 7 и 8 имеют ширину рабочей апертуры, равную = 1 м. Расстояние между решетками равно
= 20o. Осветитель 6 расположен вплотную к первой решетке = 0. Источник света 6 и решетки 7 и 8 имеют ширину рабочей апертуры, равную = 1 м. Расстояние между решетками равно  . Длина
. Длина  равна 25 см. При указанных выше параметрах проекционного устройства 1 ЛМ структуры будут формироваться в зоне дифракции Френеля, так как
равна 25 см. При указанных выше параметрах проекционного устройства 1 ЛМ структуры будут формироваться в зоне дифракции Френеля, так как  . Для муаровой структуры (1,1) параметр равен 1. Пространственный период муаровой структуры (1,1) равен = 0,5 мм. Эта муаровая структура будет иметь наибольший контраст в плоскости, удаленной от второй решетки на расстояние
. Для муаровой структуры (1,1) параметр равен 1. Пространственный период муаровой структуры (1,1) равен = 0,5 мм. Эта муаровая структура будет иметь наибольший контраст в плоскости, удаленной от второй решетки на расстояние  = 22,5 см. Величина
= 22,5 см. Величина  превышает 0,6. Угловой размер половины апертуры осветителя
превышает 0,6. Угловой размер половины апертуры осветителя  равен 48o. Он больше, чем полуширина углового спектра света, излучаемого элементами рабочей поверхности осветителя 6, >. Глубина резкости муаровой структуры (1,1) примерно равна
равен 48o. Он больше, чем полуширина углового спектра света, излучаемого элементами рабочей поверхности осветителя 6, >. Глубина резкости муаровой структуры (1,1) примерно равна  =0,8 мм. Относительная глубина резкости ЛМ структуры (1,1) равна
=0,8 мм. Относительная глубина резкости ЛМ структуры (1,1) равна  0,34 10-2. Ширина центральной области ЛМ структуры (1,1) равна примерно
0,34 10-2. Ширина центральной области ЛМ структуры (1,1) равна примерно  67 см. Пространственный период муаровой структуры (1,2) равен
67 см. Пространственный период муаровой структуры (1,2) равен  = 0,17 мм. Эта муаровая структура имеет наибольший контраст на расстоянии
= 0,17 мм. Эта муаровая структура имеет наибольший контраст на расстоянии  = 7,5 см от проекционного устройства. Наибольшее значение контраста муаровой структуры (1,2) примерно равно
= 7,5 см от проекционного устройства. Наибольшее значение контраста муаровой структуры (1,2) примерно равно  . Глубина резкости муаровой структуры (1,2) равна
. Глубина резкости муаровой структуры (1,2) равна  = 0,3 мм, ее относительная глубина резкости равна
= 0,3 мм, ее относительная глубина резкости равна 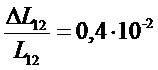 . Ширина центральной области ЛМ структуры (1,2) равна
. Ширина центральной области ЛМ структуры (1,2) равна  = 78 см. Если, не меняя остальные параметры проекционного устройства 1, расстояние от первой решетки 7 до второй решетки 8 сделать равным 45 см, то муаровая структура (1,2) будет иметь максимальный контраст в плоскости, удаленной на расстоянии = 15 см от проекционного устройства. Угловой размер половины рабочей апертуры осветителя в этом случае равен 40o. Он больше, чем полуширина углового спектра света, излучаемого элементами поверхности осветителя,
= 78 см. Если, не меняя остальные параметры проекционного устройства 1, расстояние от первой решетки 7 до второй решетки 8 сделать равным 45 см, то муаровая структура (1,2) будет иметь максимальный контраст в плоскости, удаленной на расстоянии = 15 см от проекционного устройства. Угловой размер половины рабочей апертуры осветителя в этом случае равен 40o. Он больше, чем полуширина углового спектра света, излучаемого элементами поверхности осветителя,  . При = 45 см ширина центральной области ЛМ структуры (1,2) равна = 62 см, ее относительная глубина резкости равна
. При = 45 см ширина центральной области ЛМ структуры (1,2) равна = 62 см, ее относительная глубина резкости равна 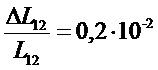 .
.
Проекционное устройство с параметрами, при которых ЛМ структура по п. 3 формулы изобретения формируется в его зоне дифракции Френеля, предпочтительно использовать для дальнометрии и профилометрии в случаях, когда есть необходимость минимизировать период и относительную глубину резкости ЛМ структуры, при условии, что плоскость наибольшего контраста ЛМ структуры расположена на заданном расстоянии от проекционного устройства. Преимуществом реализации способа по п. 3 формулы изобретения также может являться то, что в этом случае можно сформировать и использовать для дальнометрии и профилометрии ЛМ структуру с заданным, например, оптимальным для измерений, пространственным периодом, которая удалена от проекционного устройства на относительно большое расстояние, которое по крайней мере больше, чем расстояние от проекционного устройства до границы его зоны ГО. Специфические особенности реализации способа по п. 3 формулы изобретения связаны, в частности, с ограничениями для ЛМ структур (N,M) с нечетным значением индекса M на ширину частотного спектра света, а также на диапазон изменения расстояний между решетками и/или их периодов.
Источники литературы
1. Гужов В. И. Методы измерения 3D-профиля объектов. Контактные, триангуляционные системы и методы структурированного освещения, Новосибирск, Изд-во НГТУ, 2015, 82 с.;
2. Zhang S. High-Speed 3D Imaging with Digital Fringe Projection Techniques, CRC Press, 2019, 216 p.;
3. Giancola S., Valenti M., and Sala R. A Survey on 3D Cameras: Metrological Comparison of Time-of-Flight, Structured-Light and Active Stereoscopy Technologies, Springer Briefs in Computer Science, 2018, 90 p.;
4. Berkovic G. and Shafir E. «Optical methods for distance and displacement measurements» // Adv. Opt. Photon. 2012, Vol.4, Issue 4, pp. 441-471;
5. Marrugo A. G., Gao F., and Zhang S. «State-of-the-art active optical techniques for three-dimensional surface metrology: a review» // J. Opt. Soc. Am. A, 2020, Vol. 37, Issue 9, pp. B60-B77;
6. Patent US10557939, 11.02.2020 «Lidar system with improved signal-to-noise ratio in the presence of solar background noise» // Campbell S. R., Eichenholz J. M., Weed M. D.;
7. Patent US20150055853, 26.02.2015 «Method and system for providing three-dimensional and range inter-planar estimation» // Gordon E., Zalevsky Z., Duadi H.;
8. Patent US20120140243A1, 07.06.2012 «Non-contact surface characterization using modulated illumination» // Colonna de Lega X. M.;
9. Takeda M., Aoki T., Miyamoto Y., Tanaka H., Gu R., Zhang Z. «Absolute 3-D shape measurements using coaxial and coimage plane optical systems and Fourier fringe analysis for focus detection» // Optical Engineering, 2000, Vol. 39, No.1, pp. 61–68;
10. Otani Y. «Uniaxial 3D Shape Measurement» // Handbook of 3D Machine Vision. Optical Metrology and Imaging, Edited By Song Zhan, CRC Press. 2013, Chapter 11, pp. 275-281;
11. Cheng N.-J., Hsu C.-Y., Lin Y.-A., Su W.-H. «3D image retrieval based on 1D scanning fringe projections» // Proc. SPIE, 2018, Vol. 10755, pp. 1075514-1 - 1075514-6;
12. Xu Y. and Zhang S. «Uniaxial three-dimensional shape measurement with projector defocusing» // Optical Engineering, 2012, Vol. 51, No. 2, pp. 023604-1 - 023604-6;
13. Jing H., Su X., and You W. «Uniaxial three-dimensional shape measurement with multioperation modes for different modulation algorithms» // Optical Engineering, 2017, Vol. 56, No. 3, pp. 034115-1 - 034115-11;
14. Patent US6376818 B1, 23.04.2002 «Microscopy imaging apparatus and method» // Wilson T., Neil M. A. A., Juskaitis R.;
15. Neil M. A. A., Juskaitis R., and Wilson T. «Method of obtaining optical sectioning by using structured light in a conventional microscope» // Opt. Lett. 1997, Vol. 22, No. 24, pp. 1905–1907;
16. Patent US4657394, 14.04.1987 «Apparatus and method for obtaining three dimensional surface contours» // Halioua M.;
17. Patent US20140253929, 11.09.2014 «Apparatus and method for 3D surface measurement» // Huang L., Ng C. S., Koh H. J., Asundi A. K.;
18. Патент RU2232373C1, 10.07.2004 «Способ оптического измерения формы поверхности трехмерного объекта (варианты)» // Левин Г. Г., Вишняков Г. Н., Лощилов К. Е.;
19. Гужов В. И. Методы измерения 3D-профиля объектов. Фазовые методы, Новосибирск, Изд-во НГТУ, 2016, 82 с.
20. Geng J. «Structured-light 3D surface imaging: a tutorial» // Advances in Optics and Photonics, 2011, Vol. 3, Issue 2, pp. 128-160;
21. Patent US5289264, 22.02.1994 «Method and apparatus for ascertaining the absolute coordinates of an object» // Steinbichler H.;
22. Patent US5612786, 18.03.1997 «Contour measurement system» // Huber E. D., Williams R. A., Shough D. M., Kwon O. Y., Welling R. L.;
23. Patent US20100299103 A1, 25.11.2010 «Three dimensional shape measurement apparatus, three dimensional shape measurement method, and computer program» // Yoshikawa H.;
24. Патент RU2148793, 10.05.2000 «Способ измерения формы и пространственного положения поверхности объектов» // Филиппов Е. И., Нейланд А. Б., Бойко В. В., Бабичев Г. С., Сивохин А. В.;
25. McCurry R. E. «Multiple Source Moiré Patterns» // J. Appl. Phys., 1966, Vol. 37, Issue 2, pp. 467 - 472;
26. Ebbeni J. «Nouveaux aspects du phénomène de moiré» // Nouvelle Revue d'Optique Appliquée, 1970, Vol. 1, No. 5, pp. 333-342;
27. Roblin M. L. «Réalisation D'unsystème de Franges Achromatiques a Pas Variable» // Optica Acta: International Journal of Optics, 1971, Vol. 18, No. 7, pp. 539-545;
28. Swanson G. J. and Leith E. N. «Analisys of the Lau effect and generalized grating imaging» // J. Opt. Soc. Am. A, 1985, Vol. 2, No. 6, pp. 789-793;
29. Patent US3812352, 21.05.1974 «Encoder readout system» // MacGovern A. J.;
30. Pettigrew R. M. «Analysis Of Grating Imaging And Its Application To Displacement Metrology» // Proc. SPIE, 1978, Vol. 136, pp. 325-332;
31. Patorski K. «The Self-Imaging Phenomenon and Its Applications» // Progress in Optics XXVII, Edited By E. Wolf, Elsevier Science Publishers, 1989, 107 p.
32. Crespo D., Alonso J., and Bernabéu E. «Generalized imaging using an extended monochromatic light source» // J. Opt. Soc. Am. A, 2000, Vol. 17, No. 7, pp. 1231-1240;
33. Iwata K. «Interpretation of generalized grating imaging» // J. Opt. Soc. Am. A, 2008, Vol. 25, No. 9, pp. 2244-2250;
34. Lau E. «Beugungserscheinungen an Doppelrastern» // Ann. Phys., 1948, Vol. 437, Issue 7-8, pp. 417-423;
35. Swanson G. J. and Leith E. N. «Lau effect and grating imaging» // J. Opt. Soc. Am., 1982, Vol. 72, No. 5, pp. 552-555;
36. Torcal-Milla F. J., Sanchez-Brea L. M., and Bernabeu E. «Double grating systems with one steel tape grating» // Optics Communications, 2008, Vol. 281, Issue 23, pp. 5647–5652;
37. McCurry R. E. «Multiple Source Moiré Patterns with Photographic Diffraction Gratings» // J. Appl. Phys., 1966, Vol. 37, Issue 2, pp. 479 - 482;
38. Patent US4049965, 20.09.1977 «Measurement apparatus» // Pettigrew R. M.;
39. Patent JP2008232643 A, 02.10.2008 «Apparatus and method for measuring solid form» // Tomii T., Kusunoki F., Iwata K.; Moriwaki K., Fukuda H.;
40. Iwata K., Kusunoki F., Moriwaki K., Fukuda H., and Tomii T. «Three-dimensional profiling using the Fourier transform method with a hexagonal grating projection» // Appl. Opt., 2008, Vol. 47, No. 12, pp. 2103–2107;
41. Iwata K., Sando Y., Satoh K., Moriwaki K. «Application of generalized grating imaging to pattern projection in three-dimensional profilometry» // Appl. Opt., 2011, Vol. 50, No. 26, pp. 5115 – 5121;
42. Hassani K., Nahal A., Tirandazi N. «Surface profilometry using the incoherent self-imaging technique in reflection mode» // J. Appl. Phys., 2018, Vol. 123, pp. 035302-1 - 035302-6;
43. Thakur M., Quan C., Tay C. J. «Surface profiling using fringe projection technique based on Lau effect» // Optics and Laser Technology, 2007, Vol. 39, Issue 3, pp. 453-459;
44. Edmund optics, www.edmundoptics.eu
45. Standa, www.standa.lt
46. Artec3D, https://www.artec3d.com/portable-3d-scanners/turntable
47. Rangevision, https://rangevision.com
48. Thorlabs, Inc. https://www.thorlabs.com
49. Грузман И. С., Киричук В. С., Косых В. П., Перетягин Г. И., Спектор А.А. Цифровая обработка изображений в информационных системах, Новосибирск: Изд-во НГТУ, 2000, 168 с.;
50. Keren E., Livnat A., and Glatt I. «Moire deflectometry with pure sinusoidal gratings» // Optics Letters, 1985, Vol. 10, No. 4, pp. 167 – 169;
51. Collier R. J., Burckhardt C. B., and Lin L. H. Optical Holography, New York, Academic, 1971, Chap. 9;
52. Toto-Arellano N.-I., Goméz J.M. M., García-Lechuga L., Montes-Peréz A., Rodríguez Zurita G., Martínez García A., Martínez Dominguéz J.A. «Diffraction theory of binary amplitude and phase gratings with applications for Ronchi test» // Optik, 2015, Vol. 126, Issue 23, pp. 3717-3727;
53. Applied Image Inc., www.appliedimage.com
54. Buchwald K. «White paper: Fused Silica Transmission Gratings» // Ibsen Photonics, 2007, Publication Version: 1.0 March 2007, https://ibsen.com/wp-content/uploads/White-paper-Fused-Silica-Transmission-Gratings-v1.0-1.pdf
55. Patent JP2013114025A, 29.11.2011 «Grating of Talbot-Lau interferometer» // Iwata K.;
56. Iwata K., Satoh K., and Moriwaki K. «Relaxation of the Talbot condition in generalized grating imaging» // Applied Optics, 2012, Vol. 51, No. 16, pp. 3137 – 3144;
57. Salinas-Luna J., Granados-Agustín F., Cornejo-Rodríguez A., Luna E., Sánchez-Escobar J. J., Hernández-Cid J. M. «Ronchi test with variable-frequency rulings» // Optical Engineering, 2009, Vol. 48, No.1, pp. 013604-1 - 013604-7;
58. Кузьмин М. С., Рогов С. А. «Бинарные фазовые транспаранты на основе жидкокристаллической матрицы видеопроектора» // Журнал технической физики, 2018, Т. 88, Вып. 1, с. 85-88;
59. Компанец И. Н., Андреев А. Л. «Микродисплеи в системах пространственной модуляции света» // Квант. электрон., 2017, Т. 47, № 4, с. 294 – 302;
60. Кадомцев Б. Б. Коллективные явления в плазме, М.: Наука, 1988, 304 с.;
61. Гитлин М. С., Островский Л. А. «Модуляционное эхо в диспергирующих средах» // ЖЭТФ, 1983, Т. 85, Вып. 2, с. 487 – 499;
62. Dubetsky B. and Berman P. R. «Creating and probing subwavelength atomic gratings using spatially separated fields» // Physical Review A, 1994, Vol. 50, No. 5, pp. 4057-4068;
63. Dubetsky B. and Berman P. R. «Atom interference using microfabricated structures» // Atom Interferometry, Edited By Paul R. Berman, Academic Press, 1997, pp. 407-468;
64. García-Rodríguez L., Alonso J. and Bernabéu E. «Grating pseudo-imaging with polychromatic and finite extension sources» // Optics Express, 2004, Vol. 12, No. 11, pp. 2529-2541;
65. Sanchez-Brea L. M., Alonso J., Bernabeu E. «Quasicontinuous pseudoimages in sinusoidal grating imaging using an extended light source» // Optics Communications, 2004, Vol. 236, pp. 53–58;
66. Ye G., Liu H., Fan S., Li X., Yu H., Lei B., Shi Y., Yin L., Lu B. «A theoretical investigation of generalized grating imaging and its application to optical encoder» // Optics Communications, 2015, Vol. 354, pp. 21-27;
67. Sanchez-Brea L. M., Saez-Landete J., Alonso J., Bernabeu E. «Invariant grating pseudoimaging using polychromatic light and a finite extension source» // Applied Optics, 2008, Vol. 47, No. 10, pp. 1470-1477;
68. Olszak A., Wronkowski L. «Analysis of the Fresnel field of a double diffraction system in the case of two amplitude diffraction gratings under partially coherent illumination» // Optical Engineering, 1997, Vol. 36, No. 8, pp. 2149 - 2157;
69. Iwata K. «Interpretation of generalized grating imaging: further analysis and numerical calculation» // J. Opt. Soc. Am. A, 2008, Vol. 25, No. 12, pp. 2939-2944;
70. Case W. B., Tomandl M., Deachapunya S., and Arndt M. «Realization of optical carpets in the Talbot and Talbot-Lau configurations» // Opt. Express, 2009, Vol. 17, Issue 23, pp. 20966 -20974;
71. Tu Jinghong «Theoretical Analysis of the Lau Effect with a Sinusoidal Phase Grating» // J. Modern Optics, 1987, Vol. 34, No. 2, pp. 307-313;
72. Tu Jinhong «The Diffraction Near Fields and Lau Effect of a Square-wave Modulated Phase Grating» // J. of Modern Optics, 1988, Vol. 35, No.8, pp. 1399-1408;
73. Hassani K. and Sohrabi S. «Simple setup to measure the phase map of transparent objects based on incoherent self-imaging» // Optical Engineering, 2022, Vol. 61, No. 3, pp. 034102-1 - 034102-14;
74. Patent US5812629, 22.09.1998 «Ultrahigh resolution interferometric x-ray imaging» // Clauser J. F.;
75. Sanchez-Brea L. M., Alonso J., Saez-Landete J. B., Bernabeu E. «Analytical model of a double grating system with partial temporal and spatial coherence» // Proceedings of SPIE, 2005, Vol. 5858, pp. 585814-1 - 585814-8.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система и способ обнаружения и определения положения объектов около подвижного аппарата | 2024 |
|
RU2831921C1 |
| Координатное устройство для проекционной печати | 1982 |
|
SU1063210A1 |
| Многоканальный генератор изображений | 1991 |
|
SU1820398A1 |
| Фотоэлектрический автоколлиматор | 1980 |
|
SU953458A1 |
| ПОЛУЧЕНИЕ ФАЗЫ ДЛЯ СИСТЕМ СКАНИРОВАНИЯ С ДИФФЕРЕНЦИАЛЬНЫМ ФАЗОВЫМ КОНТРАСТОМ | 2014 |
|
RU2677763C1 |
| Способ определения подлинности и качества изготовления защитных голограмм, выполненных на основе дифракционных микроструктур, и устройство для его реализации | 2019 |
|
RU2722335C1 |
| РАСТРОВО-МУАРОВАЯ ОПТИЧЕСКАЯ СИСТЕМА | 2014 |
|
RU2596948C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ ОБЪЕКТА И ИДЕНТИФИКАЦИОННАЯ МЕТКА | 1995 |
|
RU2115168C1 |
| ЭЛЕКТРООПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ, ГЕЛЕОБРАЗНЫЙ СЛОЙ ДЛЯ ЭЛЕКТРООПТИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ, СПОСОБ ПРИГОТОВЛЕНИЯ ГЕЛЕОБРАЗНОГО СЛОЯ (ВАРИАНТЫ) И КОМПОЗИЦИЯ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2002 |
|
RU2230348C1 |
| СПОСОБ ОПТИЧЕСКОЙ ТОМОГРАФИИ ТРЕХМЕРНЫХ МИКРООБЪЕКТОВ И МИКРОСКОП ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2145109C1 |
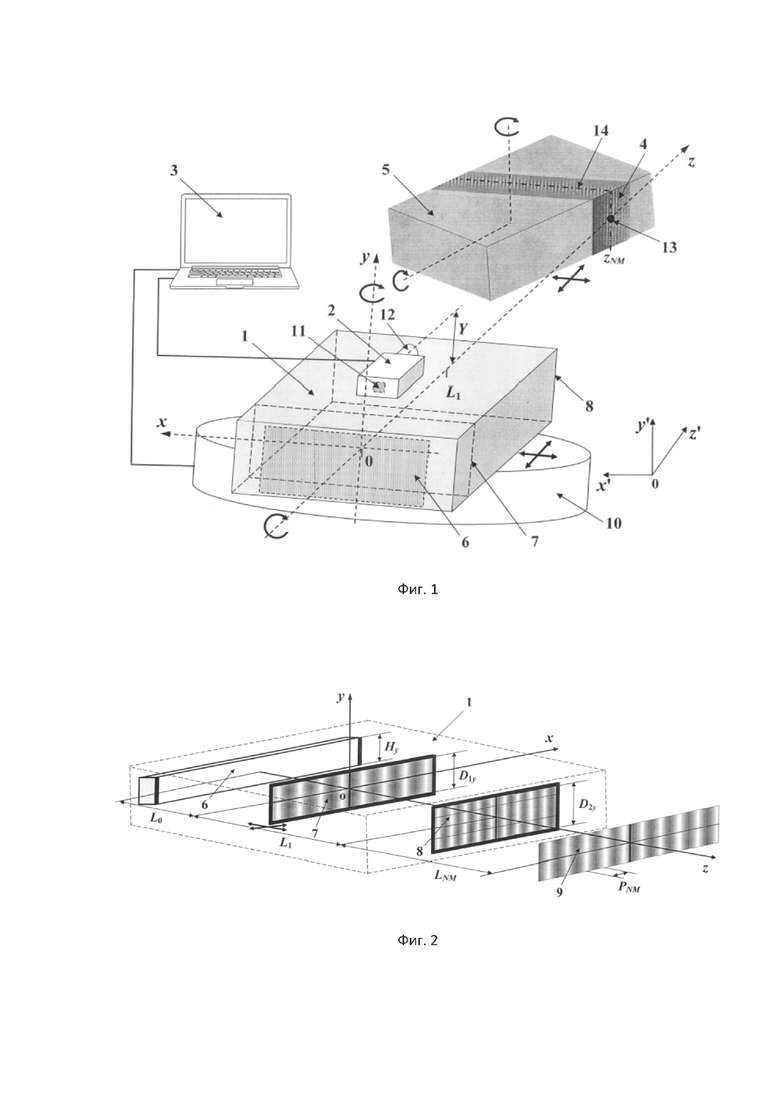
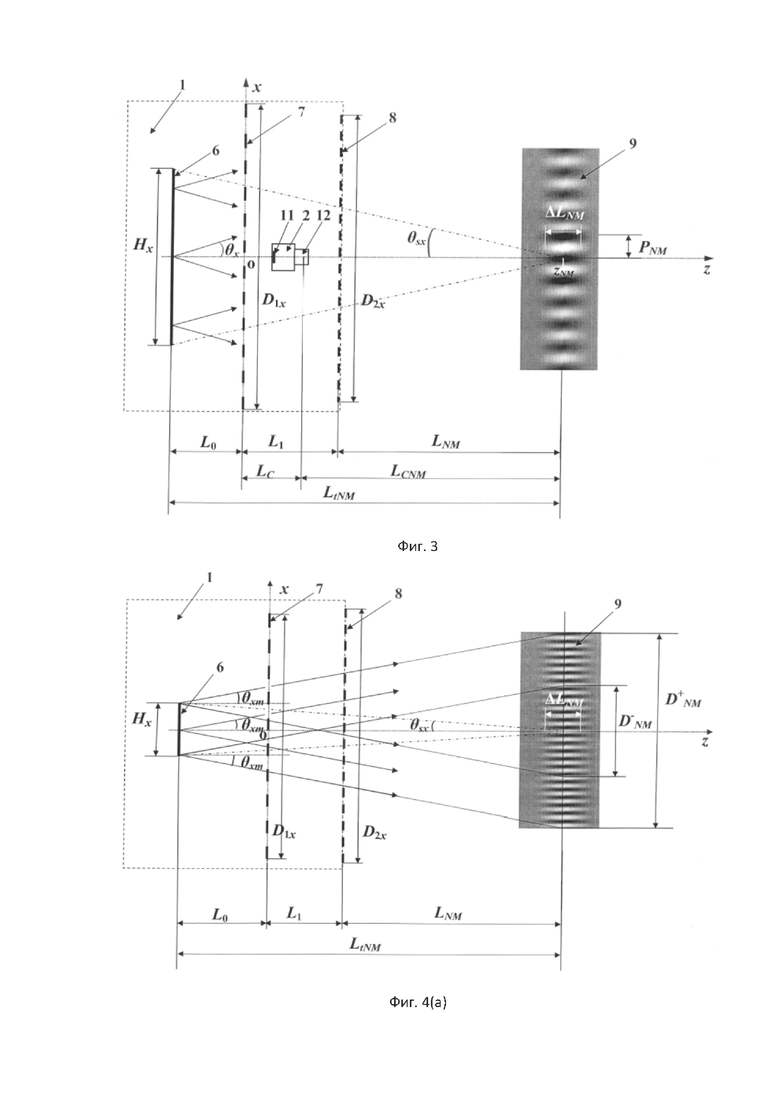
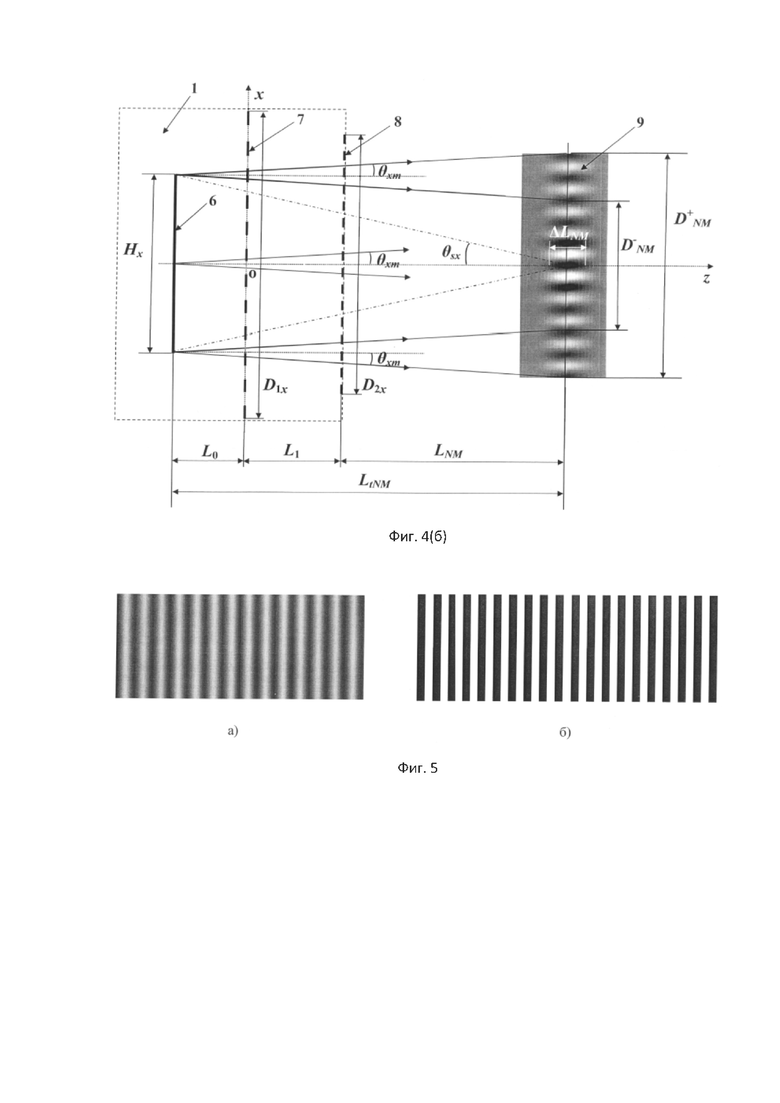
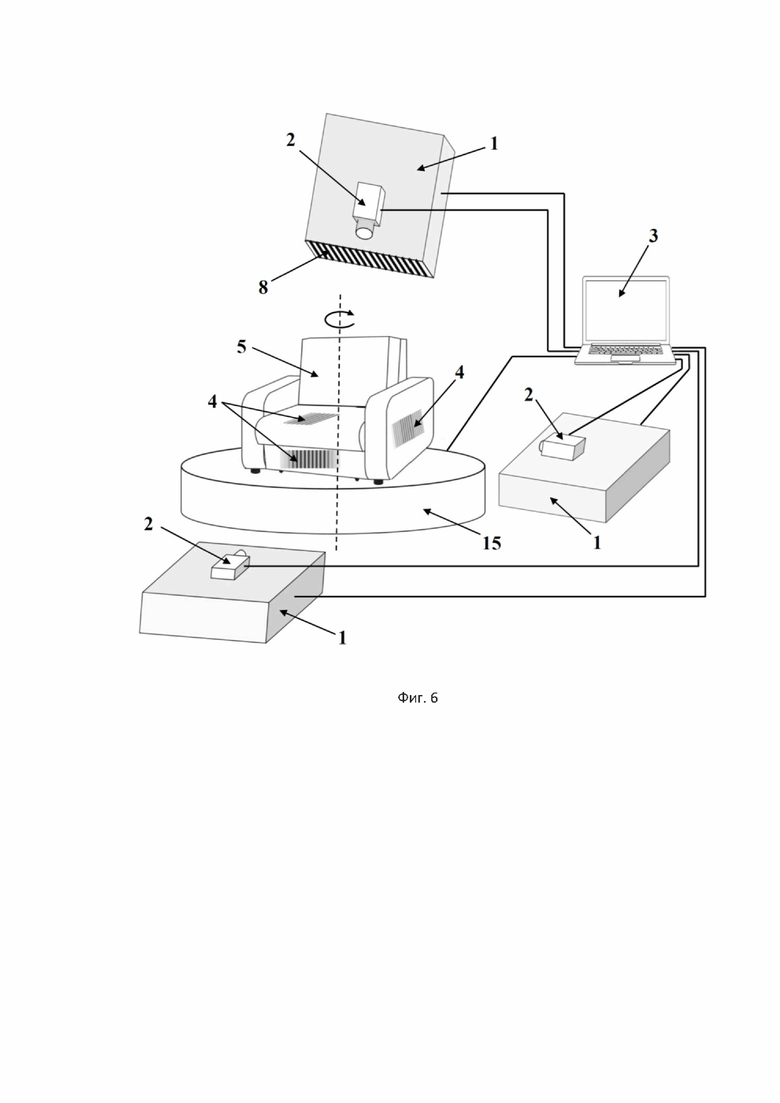
Изобретение относится к области измерительной техники, к профилометрам и дальномерам. Система, реализующая способ дальнометрии и профилометриии, включает, по меньшей мере, одно устройство регистрации изображений, вычислительное устройство и проекционное устройство, содержащее пространственно протяженный источник некогерентного света, первую и вторую плоские периодические решетки, которые расположены в параллельных плоскостях с одной стороны от источника света и которые освещаются упомянутым источником света, причем на вторую решетку падает свет, прошедший через первую решетку, при этом в системе применено по меньшей мере одно устройство для осуществления перемещения изолинии наибольшего контраста проекции ЛМ структуры, формируемой проекционным устройством, по поверхности по меньшей мере одного объекта. Технический результат – упрощение системы дальнометрии и профилометрии. 2 н. и 37 з.п. ф-лы, 6 ил.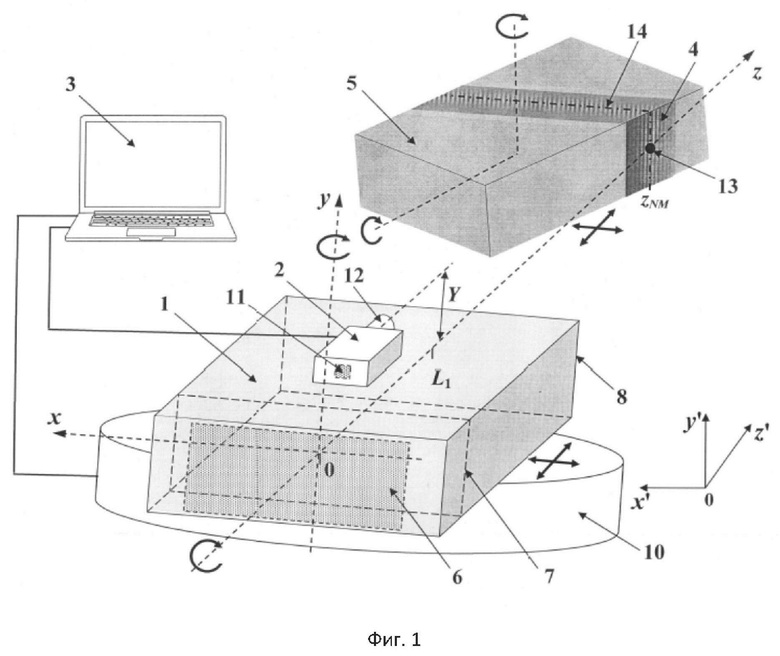
1. Способ бесконтактной дальнометрии и профилометриии, включающий в себя проецирование на поверхность объекта световой периодической муаровой структуры, формируемой с помощью проекционного устройства, содержащего пространственно протяженный источник света, который также называется осветителем, а также первую, ближнюю к источнику света, и вторую, выходную, плоские решетки с пространственно-периодической зависимостью коэффициента пропускания, регистрацию с помощью устройства регистрации изображений изображения поверхности объекта, на который спроецирована эта периодическая муаровая структура, расчет вычислительным устройством зависимости яркости изображения поверхности объекта от координат на изображении, отличающийся тем, что формируют и проецируют на объект по меньшей мере одну муаровую структуру, локализованную в направлении, которое перпендикулярно плоскости выходной решетки и которое называется продольным, где локализация муаровой структуры означает, что наименьшая глубина резкости этой муаровой структуры по крайней мере в четыре раза меньше расстояния от плоскости выходной решетки проекционного устройства до параллельной ей плоскости, на которой контраст этой муаровой структуры имеет наибольшее значение, находят путем математической обработки изображения поверхности объекта изолинию наибольшего контраста проекции на объект локализованной муаровой (ЛМ) структуры, перемещают проекцию ЛМ структуры по поверхности объекта, совмещают изолинию наибольшего контраста проекции ЛМ структуры с одним или большим числом точек на поверхности объекта, определяют продольные координаты этих точек, используя для этого известное значение расстояния от плоскости выходной решетки проекционного устройства до плоскости наибольшего контраста ЛМ структуры, находят значения поперечных координат точек поверхности объекта и ее форму, используя для этого найденные значения их продольных координат и изображение объекта.
2. Способ по п. 1, отличающийся тем, что по меньшей мере одну локализованную муаровую структуру формируют в области геометрической оптики проекционного устройства.
3. Способ по п. 1, отличающийся тем, что по меньшей мере одну локализованную муаровую структуру формируют в области дифракции Френеля проекционного устройства.
4. Способ по п. 1, отличающийся тем, что на поверхность объекта проецируют локализованную муаровую структуру, обозначаемую индексами (N, M), где N и M - натуральные числа, которую формируют с помощью проекционного устройства, включающего в себя пространсвенно протяженный источник света, а также первую, ближнюю к источнику света, и вторую, выходную, плоские одномерные решетки, которые расположены в параллельных плоскостях с одной стороны от источника света, причем эти решетки имеют одинаковое направление полос, вдоль которых направлена поперечная ось y, и периодическую зависимость амплитудного коэффициента пропускания от поперечной координаты x, перпендикулярной направлению их полос, определяют зависимость контраста квазипериодического в направлении оси x изменения яркости изображения поверхности объекта от координат на изображении, причем учитывают, что пространственный период изменения яркости поверхности объекта в направлении оси x равен периоду 
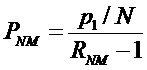




5. Способ по п. 4, отличающийся тем, что для его реализации используют по меньшей мере одну из ЛМ структур: (1,3), (1,2), (1,1), (2,1) и (3,1).
6. Способ по п. 1, отличающийся тем, что для его реализации используют по меньшей мере одну ЛМ структуру, у которой наибольшее значение контраста превосходит 0,2.
7. Способ по п. 1, отличающийся тем, что, используя одно проекционное устройство, формируют несколько локализованных муаровых структур, одновременно или последовательно перемещают их проекции по поверхности одного или большего числа объектов.
8. Способ по п. 1, отличающийся тем, что перемещение проекции одной или большего числа ЛМ структур по поверхности объекта осуществляют путем поступательного перемещения проекционного устройства или объекта.
9. Способ по п. 1, отличающийся тем, что перемещение проекции одной или большего числа ЛМ структур по поверхности объекта осуществляют путем поворота проекционного устройства и/или объекта.
10. Способ по п. 1, отличающийся тем, что перемещение проекции одной или большего числа локализованных муаровых структур по поверхности объекта осуществляют путем изменения расстояния от плоскости выходной решетки проекционного устройства до плоскости наибольшего контраста ЛМ структуры.
11. Способ по п. 4 или 10, отличающийся тем, что изменение расстояния от плоскости выходной решетки проекционного устройства до плоскости наибольшего контраста ЛМ структуры осуществляют путем изменения расстояния между первой и второй решетками, установленными в проекционном устройстве.
12. Способ по п. 4 или 10, отличающийся тем, что изменение расстояния от плоскости выходной решетки проекционного устройства до плоскости наибольшего контраста ЛМ структуры осуществляют путем изменения пространственного периода по меньшей мере одной из решеток, установленной в проекционном устройстве.
13. Способ по п. 1, отличающийся тем, что осуществляют перемещение изолинии наибольшего контраста проекции по меньшей мере одной ЛМ структуры по всей контролируемой части поверхности объекта, причем при каждом положении изолинии наибольшего контраста определяют координаты множества точек поверхности, находящихся на этой изолинии.
14. Способ по п. 4, отличающийся тем, что формируют локализованную муаровую структуру (N, M), используя для этого проекционное устройство, включающее в себя первую и вторую тонкие амплитудные решетки, а также осветитель с плоской однородной светящейся поверхностью, которая параллельна плоскостям решеток и имеет форму прямоугольника со сторонами, параллельными осям x и y, причем полуширина в плоскости 












15. Способ по п. 1, отличающийся тем, что для его реализации формируют локализованную муаровую структуру, у которой наименьшая относительная глубина резкости меньше трех процентов.
16. Система дальнометрии и профилометриии, включающая в себя по меньшей мере одно устройство регистрации изображений, вычислительное устройство и проекционное устройство, содержащее пространственно протяженный источник некогерентного света, первую и вторую плоские периодические решетки, которые расположены в параллельных плоскостях с одной стороны от источника света и которые освещаются упомянутым источником света, причем на вторую решетку падает свет, прошедший через первую решетку, отличающаяся тем, что в системе применено по меньшей мере одно устройство для осуществления перемещения изолинии наибольшего контраста проекции ЛМ структуры, формируемой проекционным устройством, по поверхности по меньшей мере одного объекта.
17. Система по п. 16, отличающаяся тем, что в ней применено проекционное устройство, в котором в качестве первой и второй решетки использованы одномерные периодические решетки, причем их полосы направлены параллельно.
18. Система по п. 16, отличающаяся тем, что в оптическом проекционном устройстве в качестве осветителя использован источник диффузного света.
19. Система по п. 16, отличающаяся тем, что в ней дополнительно применено устройство для определения координат и ориентации проекционного устройства в глобальной системе координат.
20. Система по п. 16, отличающаяся тем, что в ней применено по меньшей мере одно устройство, осуществляющее поступательное перемещение проекционного устройства и/или объекта и определяющее величину этого перемещения.
21. Система по п. 16, отличающаяся тем, что в ней применено по меньшей мере одно устройство, осуществляющее поворот проекционного устройства или объекта и определяющее величину этого поворота.
22. Система по п. 16, отличающаяся тем, что в ней применено устройство, которое контролируемо изменяет расстояние между плоскостями первой и второй решеток, установленных в проекционном устройстве.
23. Система по п. 17, отличающаяся тем, что дополнительно применено устройство, которое контролируемо перемещает по меньшей мере одну из решеток, установленных в проекционном устройстве, вдоль поперечной координаты x, перпендикулярной направлению полос решеток.
24. Система по п. 16, отличающаяся тем, что оптическая ось по меньшей мере одного устройства регистрации изображений параллельна продольной оси проекционного устройства.
25. Система по п. 16, отличающаяся тем, что в ней применено проекционное устройство, в котором установлена по меньшей мере одна амплитудная решетка.
26. Система по п. 17, отличающаяся тем, что в ней применено проекционное устройство, в котором установлена по меньшей мере одна амплитудная решетка с синусоидальной зависимостью величины изменения амплитудного коэффициента пропускания от поперечной координаты.
27. Система по п. 17, отличающаяся тем, что в ней применено проекционное устройство, в котором в качестве по меньшей мере одной решетки использован амплитудный бинарный растр.
28. Система по п. 16, отличающаяся тем, что в ней применено проекционное устройство, в котором по меньшей мере одна решетка является фазовой решеткой.
29. Система по п. 16, отличающаяся тем, что в ней применено проекционное устройство, в котором характеристики по меньшей мере одной решетки можно изменять.
30. Система по п. 16, отличающаяся тем, что в ней применено проекционное устройство, в котором для формирования по меньшей мере одной решетки использован пространственный модулятор света.
31. Система по п. 17, отличающаяся тем, что в ней применено проекционное устройство, в котором первая и вторая решетки являются амплитудными решетками.
32. Система по п. 16, отличающаяся тем, что в ней применено проекционное устройство, в котором установлены тонкие первая и вторая решетки, при прохождении через которые угловой спектр света, излучаемого осветителем, сужается менее чем на 20%.
33. Система по п. 17, отличающаяся тем, что в проекционном устройстве использован осветитель с однородной плоской светящейся поверхностью, которая параллельна плоскостям решеток и имеет форму прямоугольника со сторонами, параллельными осям x и y.
34. Система по п. 31, отличающаяся тем, что для формирования ЛМ структуры (N, M) в ней применено проекционное устройство, в котором первая и вторая решетки расположены на расстоянии друг от друга 


35. Система по п. 31, отличающаяся тем, что в ней применено проекционное устройство, в котором первая и вторая решетки имеют синусоидальную зависимостью величины изменения амплитудного коэффициента пропускания от координаты x.
36. Система по п. 33, отличающаяся тем, что в проекционном устройстве использованы осветитель, первая и вторая тонкие амплитудные решетки с угловыми размерами в плоскости
37. Система по п. 33, отличающаяся тем, что в ней применено проекционное устройство, в котором установлены первая и вторая тонкие амплитудные решетки с угловым размером в плоскости 

38. Система по п. 35, отличающаяся тем, что в ней применено проекционное устройство, в котором использованы источник света с полушириной спектра по длине волны 



39. Система по п. 35, отличающаяся тем, что в ней применено проекционное устройство, в котором использованы источник света с полушириной спектра по длине волны 
| JP 2008232643 A, 02.10.2008 | |||
| US 11375124 B2, 28.06.2022 | |||
| US 10508903 B2, 17.12.2019 | |||
| 0 |
|
SU178298A1 | |
| ГРАФО-ПРОЕКЦИОННЫЙ МУАРОВЫЙ СПОСОБ ИЗМЕРЕНИЯ | 2014 |
|
RU2583852C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ТОПОЛОГИИ ПОВЕРХНОСТИ МУАРОВЫМ МЕТОДОМ | 2004 |
|
RU2267087C1 |

