ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к области измерительной техники и может быть использовано для мониторинга пространства, окружающего подвижный аппарат, в частности, для обнаружения и определения положения объектов и препятствий около подвижного аппарата, а также для содействия в осуществлении навигации подвижного аппарата.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Для выполнения рабочих функций автономных и полуавтономных подвижных аппаратов, например, транспортных средств и робототехнических устройств, требуется надежное осуществление их локализации и навигации. Для навигации, в частности, необходимо обнаруживать и определять положение находящихся вблизи и на пути подвижных аппаратов объектов и препятствий, используя датчики и сенсоры. Автоматическое обнаружение объектов и препятствий позволяет полностью автономным подвижным аппаратам, таким как беспилотные автомобили, складская и сельскохозяйственная техника, автономные робототехнические устройства перемещаться в пространстве, избегая столкновений, не застревая, не повреждая объекты и не повреждаясь самим. Для полуавтономных или управляемых подвижных аппаратов, например, таких как мобильные системы с дистанционным управлением и автомобили с системами помощи водителю, автоматическое обнаружение препятствий облегчает управление ими, предупреждая оператора или водителя о наличии объектов и препятствий, или автоматически адаптируя команды человека. В частности, задачей устройств, которые называются парктрониками, является помощь при парковке транспортных средств, а также помощь при их передвижении по загруженным дорогам и дворовым территориям. Чтобы осуществлять безопасное перемещение и выполнять безопасные маневры в пространстве, целесообразно использовать бесконтактные датчики и сенсорные системы, которые способны в режиме реального времени обнаруживать препятствия и объекты около подвижных аппаратов и на их пути. Предпочтительно, чтобы такие датчики и системы обладали высоким быстродействием, низким энергопотреблением и невысокой стоимостью.
Известны пассивные бесконтактные системы навигации подвижных аппаратов, которые включают в себя по меньшей мере одно устройство регистрации изображений, например, телекамеру, предназначенное для наблюдения за окружающим пространством, а также систему обработки полученных изображений. В основе широко распространенного пассивного способа навигации, который основан на регистрации изображений объектов, расположенных в окружающем подвижный аппарат пространстве, лежит стереовидение (см., например, [1 - 4]). При стереовидении изображения окружающей среды регистрируют по меньшей мере двумя датчиками изображений, расположенными в разных местах на подвижном аппарате, причем их взаимное положение известно. Расстояния до точек объекта определяют методом триангуляции (параллакса). Недостаток этого способа в том, что его реализация требует выявления одних и тех же областей или точек объекта на изображениях, регистрируемых разными датчиками изображений. Это не всегда возможно сделать правильно, поэтому результаты измерений с помощью пассивных систем стереовидения в ряде случаев бывают ошибочными. Например, ошибки могут возникнуть в случаях, когда у объекта отсутствуют особенности поверхности, такие как углы, узоры, края и т. д., которые можно легко идентифицировать на изображениях. Кроме того, системы стереовидения плохо работают при недостаточной освещенности, например, ночью в отсутствии искусственного освещения. Недостатками систем пассивного стереовидения является также то, что они обычно работают недостаточно быстро для осуществления локализации объектов и навигации в реальном времени, к тому же они требуют использования больших вычислительных мощностей.
Известно множество активных способов обнаружения и измерения расстояния до объектов и препятствий, расположенных около подвижного аппарата. Для осуществления ряда из них используют ультразвуковые датчики (сонары) (см., например, [5 - 9]). В таком ультразвуковом датчике излучатель генерирует и излучает ультразвук, причем обычно излучаются короткие ультразвуковые импульсы. Приемник регистрирует отраженные или рассеянные эхо-сигналы. Ультразвуковой датчик позволяет обнаруживать объекты на расстоянии до нескольких метров, и один детектор обычно имеет угол зрения примерно 30 градусов. Использование ультразвуковых датчиков для навигации имеет ряд недостатков. В частности, их недостаток в том, что сложно отличить истинные эхо-сигналы, отраженные от объекта, от шумовых ультразвуковых сигналов или сигналов многократного отражения. Ультразвуковые датчики хуже работают при движении подвижного аппарата по пересеченной местности, при дожде или снегопаде, при нахождении на луче зрения датчика высокой травы или кустарников, а также в случае присутствия на поверхности датчика льда или других загрязнений. Кроме того, как правило, ультразвуковые датчики нужно устанавливать достаточно высоко над поверхностью, чтобы она не попадала в их поле зрения и не давала ложных эхо-сигналов. С помощью ультразвуковых датчиков трудно обнаружить и локализовать ямы, бордюры, тонкие объекты, например, кабели, цепи, тросы, трубы, столбы, деревья, а также объекты и предметы, поглощающие ультразвуковые волны (одежда, пористые материалы, кучи снега) или отражающие ультразвук в основном в сторону, противоположную датчику. Даже в тех случаях, когда на подвижном аппарате установлено нескольких ультразвуковых датчиков, вблизи него обычно имеются слепые зоны.
Известны активные способы обнаружения и локализации препятствий и объектов, расположенных около подвижного аппарата, для реализации которых используется электромагнитное излучение видимого и близкого к нему диапазонов (см., например, [1]). Известен активный способ обнаружения и определения положения объектов и препятствий с помощью инфракрасного (ИК) излучения (см., например, [10 - 12]). Для реализации этого способа используют по меньшей мере один ИК датчик, который содержит источник ИК излучения, формирующий тонкий луч ИК излучения, и детектор, чувствительный к ИК излучению. Источником ИК излучения служит, например, светоизлучающий или лазерный диод с линзой или диафрагмой на выходе. Детектор обычно представляет собой коллимированный ИК фотодиод. Детектор регистрирует ИК излучение отраженное или рассеянное объектами, расположенными вблизи подвижного аппарата. Область, освещаемая источником ИК излучения, попадает в поле зрения детектора ИК излучения. С помощью ИК датчика можно обнаружить объекты, попадающие в область пересечения полей зрения источника и детектора, и определить расстояние до этих объектов, в частности, можно контролировать расстояние от подвижного аппарата до поверхности дороги, пола или стены. ИК датчик обычно позволяет обнаруживать объекты на расстоянии около 1 метра и меньше. Существенный недостаток таких ИК датчиков в том, что с их помощью трудно осуществлять контроль больших областей окружающего пространства, т.к. они могут обнаруживать только объекты, расположенные вдоль узкого луча ИК излучения. Вращение ИК датчика с целью расширения области обзора увеличивает время измерений, что приводит к ухудшению быстродействия системы. Установка на подвижном аппарате нескольких ИК-датчиков усложняет систему мониторинга, однако не позволяет полностью решить проблему контроля больших областей пространства.
Широко распространены времяпролетные способы обнаружения объектов и препятствий, а также измерения их координат (см., например, [1, 13 - 18]). В основе этих способов лежит измерение времени распространения света от источника света до объекта и обратно. Наиболее часто для их реализации используются лазерные лидары (см., например, [1, 14 - 18]). Обычно лазер, который используется в лидаре, излучает короткоимпульсное или непрерывное модулированное оптическое излучение. В лидарных навигационных системах лазер и приемник часто устанавливают на вращающейся платформе, чтобы можно было выполнять сканирование окружающего пространства узким лазерным лучом. Качество трехмерных (3D) изображений, получаемых с помощью лидара, обычно достаточно высокое. Однако такое устройство обладает рядом недостатков. Лидары - энергоемкие и дорогие устройства, они нестабильно работают в дождь или снегопад, требуют для получения 3D изображения окружающего пространства использования больших вычислительных ресурсов. Они плохо подходят для мониторинга областей, удаленных на расстояние менее 3 м. С их помощью трудно обнаружить и локализовать тонкие объекты. Излучение лидара может представлять опасность для глаз и оптических устройств. При использовании лидаров в качестве парктроника на транспортном средстве требуется установка нескольких таких устройств. Это сильно усложняет и удорожает систему навигации. Кроме того, лидары слишком громоздкие, чтобы их можно было устанавливать на малые робототехнические устройства.
Известны системы и способы обнаружения и определения положения объектов с помощью метода активного стереовидения (активной оптической триангуляции), в основе которых лежит излучение проекционным устройством, установленном на подвижном аппарате, структурированного или кодированного света (световых паттернов) и регистрация изображения проекции таких световых структур на поверхность объектов, расположенных в освещаемой проектором области пространства (см., например, [1, 19 – 33]). Активная оптическая триангуляционная система для мониторинга пространства, окружающего транспортное средство, которая известная из источника [28], является прототипом системы, предлагаемой в настоящем изобретении. Система-прототип содержит по меньшей мере один проектор, выполненный с возможностью излучения инфракрасного света в пространство, окружающее транспортное средство, по меньшей мере одну ИК камеру, выполненную с возможностью регистрации изображения объектов, освещенных инфракрасным светом, а также блок обработки изображений, снятых одной или несколькими ИК камерами. Проектор инфракрасного света включает в себя источник ИК света, а также устройства формирования и вывода пучка ИК излучения. В проекционном устройстве в качестве источника ИК излучения может быть использован светодиод или лазер. Устройством формирования пучка инфракрасного света может служить, в частности, пространственный модулятор света, например, зеркало на основе микроэлектромеханических систем (МЭМС) [28]. Вывод пучка ИК излучения осуществляется с помощью объектива, установленного на выходе проектора. Такой проектор может излучать как гладкий пучок света, так и структурированный свет, например, один или множество тонких лучей света, полосу или узор из полос света. Проектор проецирует гладкий световой пучок или структурированный свет на сцену и объекты, окружающие транспортное средство. Блок регистрации изображения регистрирует с помощью ИК камеры инфракрасный свет, отраженный от объектов или рассеянный ими, определяет и отображает двумерное (2D) распределение яркости отраженного или рассеянного света. Проектор и устройство регистрации изображений расположены на транспортном средстве на расстоянии друг от друга, величина которого известна. Обычно оптические оси проектора и устройства регистрации изображений направлены под углом друг к другу. Блок обработки изображения, используя метод триангуляции, определяет расстояние до объекта на основе зарегистрированного блоком регистрации изображений распределения интенсивности отраженного или рассеянного ИК излучения, а также на основе данных о форме пучка структурированного света, излучаемого проектором. Недостатками активных триангуляционных систем навигации и, в частности, системы-прототипа являются:
• использование в проекторе сложного в изготовлении пространственного модулятора света, а также высококачественного объектива,
• высокая стоимость оптического проектора,
• необходимость использования мощных компьютеров для расчета 3D изображений окружающего пространства
• необходимость калибровки измерительной системы в целом.
При использовании активного триангуляционного способа обнаружения и определения положения объектов расстояние до точек объекта и его форма определяют по углам, под которыми проецируются на поверхность объекта и наблюдаются элементы световой структуры [1, 28, 34]. Активный триангуляционный способ недостаточно хорошо работает при плохом соответствии проецируемой световой структуры форме и структуре поверхности объекта. Например, проецируемые линии могут располагаться под неудобным углом к линиям структуры поверхности объекта или краям сцены, что отрицательно сказывается на точности и достоверности измерений. Некоторые элементы проецируемых оптических структур бывает сложно или невозможно найти на изображении, потому что они экранируются от устройства регистрации, например, выступами объекта. Кроме того, недостатками активного триангуляционного способа мониторинга пространства около подвижного аппарата с использованием структурированного или кодированного света являются:
• сложность алгоритмов обработки изображений,
• потребность в дополнительной равномерной подсветке для регистрации 2D изображений объектов,
• зависимость поперечного размера области, освещаемой одним проектором, от расстояния до проектора,
• наличие слепых зон вблизи проектора,
• необходимость использования нескольких проекционных устройств для контроля широких областей пространства,
• взаимные помехи, возникающие при использовании нескольких проекторов.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Принимая во внимание недостатки систем и способов обнаружения и определения положения объектов около подвижного аппарата, описанных в разделе Предшествующий уровень техники, в основе изобретения лежит задача предложить систему и способ, которые позволят устранить по крайней мере часть этих недостатков. В частности, задача данного изобретения состоит в том, чтобы предложить оптическую систему и способ обнаружения объектов, а также определения положения объектов около подвижного аппарата, которые не используют триангуляционные и времяпролетные методы измерения. Более конкретно задача данного изобретения заключается в том, чтобы предложить систему и способ, которые позволяют обнаружить и определить положение объектов около подвижного аппарата, используя для этого световую локализованную муаровую (ЛМ) структуру, которая формируется широкопольным безобъективным проекционным устройством.
Предлагаемая система также, как и система, которая является прототипом, содержит по меньшей мере одно проекционное устройство (проектор), излучающее структурированный свет. Проекционное устройство включает в себя источник света и устройство формирования и вывода структурированного излучения. В частном случае предлагаемая система также, как и система-прототип, содержит по меньшей мере одно устройство регистрации изображений области пространства, освещаемой проекционным устройством, а также вычислительное устройство. В другом частном случае наблюдение и анализ изображения пространства, освещаемого проекционным устройством, осуществляет водитель или оператор, управляющий подвижным аппаратом. В отличие от системы-прототипа в предлагаемой системе проекционное устройство содержит по меньшей мере одну периодическую пропускающую решетку, которая освещается одним или периодическим набором источников света видимого или близкого к нему диапазонов, который будем называть осветителем, причем осветитель и пропускающая решетка являются пространственно протяженным по крайней мере в одном заданном поперечном направлении, которое перпендикулярно нормали к поверхности решетки. На выходе такого проектора не требуется установка объектива. Новым является то, что широкопольное проекционное устройство, используемое в предлагаемой системе, формирует световую муаровую структуру, которая достаточно сильно локализована в продольном направлении, которое перпендикулярно поверхности пропускающей решетки, установленной в проекционном устройстве. Отличие предлагаемой системы от системы-прототипа также в том, что продольная ось проекционного устройства и оптическая ось устройства регистрации изображений могут быть параллельны.
В частном случае в предлагаемой системе применено проекционное устройство, в котором установлены две плоские одномерные (1D) периодические решетки, которые расположены друг за другом в несовпадающих параллельных плоскостях с одной стороны от пространственно протяженного осветителя и которые освещаются упомянутым осветителем, причем на вторую решетку, которая является выходной, падает свет, прошедший через первую решетку. Периоды решеток, расстояние между их плоскостями, размеры осветителя и решеток в направлении, которое параллельно плоскости выходной решетки и перпендикулярно направлению ее полос, а также ширина углового спектра света, излучаемого осветителем, в плоскости, перпендикулярной направлению полос решеток, должны быть такими, чтобы проекционным устройством формировалась по меньшей мере одна ЛМ структура.
В другом частном случае в системе применено проекционное устройство, в котором установлена одна плоская периодическая пропускающая решетка, которая является выходной, и решетчатый осветитель, который представляет собой периодическую решетку, или линейку, или матрицу источников света, светящиеся поверхности которых расположены в плоскости, параллельной плоскости выходной решетки, причем совпадает по меньшей мере одно направление периодического изменения характеристик выходной решетки и решетчатого осветителя. Выходная решетка освещается решетчатым осветителем. Параметры такого проекционного устройства и его элементов должны быть такими, чтобы им формировалась по меньшей мере одна локализованная муаровая структура.
Предлагаемый способ так же, как и способ, который реализуется при использовании системы-прототипа, заключается в освещении области пространства, окружающего подвижный аппарат, структурированным светом, который формируется с помощью по меньшей мере одного проекционного устройства. Новым является то, что для реализации способа используется структурированный свет, представляющий собой по меньшей мере одну квазипериодическую в пространстве локализованную муаровую структуру. Локальность муаровой структуры означает, что глубина резкости этой муаровой структуры по крайней мере в четыре раза меньше расстояния от плоскости выходной решетки проекционного устройства до параллельной ей плоскости, на которой контраст этой муаровой структуры имеет наибольшее значение. В видимом и соседних с ним диапазонах спектра электромагнитных волн световая локализованная муаровая структура может формироваться, например, с помощью описанного в изобретении проекционного устройства. В отличие от способа, реализуемого при использовании системы-прототипа, в предлагаемом способе для определения расстояния до объекта и его положения не применяется метод триангуляции.
В частном случае реализации предлагаемого способа обнаружения и определения положения объектов около подвижного аппарата регистрация изображения окружающего пространства и объектов, на которые спроецирован структурированный свет, производится с помощью по меньшей мере одного регистрирующего устройства. Затем вычислительным устройством осуществляется математическая обработка полученных изображений, и на основе результатов этой обработки определяется положение объекта, а также может быть зафиксирован факт приближения подвижного аппарата к объекту на известное расстояние. Подход, который используется при математической обработке 2D изображений области окружающего пространства, освещаемой проекционным устройством, отличается от подхода, используемого для обработки данных, полученных с помощью системы-прототипа. В частности, при реализации предлагаемого способа рассчитывают зависимость от 2D координат на изображениях величины контраста квазипериодического с известным пространственным периодом изменения яркости изображений, которые зарегистрированы устройством регистрации изображений при разном взаимном положении подвижного аппарата и объекта. При появлении на изображении по меньшей мере одной области, в пределах которой контраст квазипериодического с этим периодом изменения яркости изображения превышает заданную величину, фиксируют факт приближения этой области поверхности объекта к плоскости выходной решетки проекционного устройства на известное расстояние или ближе. Далее, используя вычислительное устройство, определяют положение этой области объекта относительно подвижного аппарата и его частей, учитывая при этом то, что плоскость постоянного контраста, например, наибольшего или равного половине наибольшего контраста ЛМ структуры, параллельна плоскости выходной решетки проекционного устройства и расположена на известном расстоянии от нее, а также учитывая результаты калибровки устройства регистрации изображений, информацию о форме подвижного аппарата и положении на нем проекционного устройства. Если расстояние до объекта меньше или равно заданному, вычислительным устройством или другим устройством управления может быть дана команда на остановку или изменение направления движения подвижного аппарата либо подан сигнал водителю или оператору, управляющему им.
В другом частном случае наблюдение за областью пространства, которая освещается проекционным устройством, формирующим по меньшей мере одну ЛМ структуру, осуществляется водителем или оператором подвижного аппарата. При зрительной регистрации им на поверхности какого-либо объекта по меньшей мере одной области, в пределах которой наблюдается квазипериодическое с известным пространственным периодом и различимым глазом контрастом изменение яркости поверхности, водитель фиксирует факт приближения подвижного аппарата к объекту или его части на известное расстояние. На основании этой информации водитель или оператор может принять решение об остановке или изменении направления движения подвижного аппарата.
Технический результат - упрощение системы обнаружения и определения положения объектов около подвижного аппарата, в том числе с позиции изготовления и настройки ее устройств, повышение быстродействия и надежности системы, упрощение способа обнаружения и определения положения объектов около подвижного аппарата и его навигации, возможность обнаружения и определения положения тонких объектов, уменьшение количества и размеров слепых зон вблизи подвижного аппарата, возможность совмещения функции определения положения объектов около подвижного аппарата и освещения области пространства около него.
Сущность изобретения поясняется следующими фигурами.
На фиг. 1 (а, б) схематично изображен подвижный аппарат, система обнаружения и определения положения объектов около подвижного аппарата, а также объект, расположенный перед ним. На фиг. 1 (а) объект расположен вне области локализации световой муаровой структуры, формируемой проекционным устройством; на фиг. 1 (б) объект расположен в области локализации муаровой структуры.
На фиг. 2 приведена схема двухрешеточного проекционного устройства.
На фиг. 3 приведена схема проекционного устройства с одной пропускающей решеткой, в котором осветитель представляет собой одномерную периодическую решетку источников света.
На фиг. 4 приведена схема проекционного устройства с одной пропускающей решеткой, в котором осветитель представляет собой периодическую линейку источников света.
На фиг. 5 приведена схема проекционного устройства с одной пропускающей решеткой, в котором осветитель представляет собой периодическую прямоугольную матрицу источников света.
На фиг. 6 схематично изображена проекция на плоскость y = 0 элементов двухрешеточного проекционного устройства, устройства регистрации изображений, объекта, а также локализованной муаровой структуры с отображением позиционных и угловых соотношений между элементами устройств, световыми лучами и пространственными областями ЛМ структуры.
На фиг. 7 схематично изображен подвижный аппарат, система обнаружения и определения положения объектов впереди и позади подвижного аппарата, в которой используются два проекционных устройства и два устройства регистрации изображений.
На фиг. 8 схематично изображен вид сверху объекта, подвижного аппарата и системы обнаружения и определения положения объектов около подвижного аппарата, включающую два проекционных устройства, у которых оптические оси направлены в горизонтальной плоскости под острым углом друг к другу, и два устройства регистрации изображений.
На фиг. 9 схематично изображены подвижный аппарат и система обнаружения и определения положения объектов, в которой использовано два проекционных устройства, формирующих ЛМ структуры с горизонтальным направлением полос, а также объекты, расположенные перед подвижным аппаратом.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Система и способ обнаружения и определения положения объектов около подвижного аппарата будут рассмотрены со ссылками на вышеупомянутые фигуры, на которых одинаковые цифровые символы обозначают одни и те же элементы системы или одни и те же элементы пространственной структуры оптического излучения. Предлагаемые в изобретении система и способ могут быть использованы для помощи в навигации подвижных аппаратов различных типов и конструкций. Способ в частном случае его осуществления, например, в случае его использовании для содействия навигации беспилотного автономного подвижного аппарата, может быть реализован с помощью системы, схематическое изображение которой приведено на фиг.1(а, б). Система обнаружения и определения положения объектов, которая установлена на подвижном аппарате 1, включает в себя проекционное устройство 2, устройство регистрации изображений 3 с объективом 4 и вычислительное устройство 5. Будем считать для определенности, что подвижный аппарат 1 движется по твердой поверхности. Он является двухосным и приводится в движение при помощи колес. Поворот подвижного аппарата осуществляется путем поворота его передних колес 6, а направление задних колес 7 относительно подвижного аппарата фиксировано и определяет направление его прямолинейного движения. На фиг.1(а, б) также изображен объект 8, который освещается светом, излучаемым проекционным устройством 2. На фиг.1(а) объект 8 расположен вне области локализации световой ЛМ структуры, формируемой проекционным устройством 2. На фиг.1(б) объект 8 расположен в области локализации муаровой структуры. Проекция ЛМ структуры на поверхность объекта 8 обозначается цифрой 9.
Из патента RU 2807409 [35] известно двухрешеточное проекционное устройство, формирующее локализованную муаровую структуру. В этом патенте такое проекционное устройство используется для реализации способа бесконтактной дальнометрии и профилометрии [35]. Конструкции проекционных устройств, которые предлагается использовать в данном изобретении, являются, по сути, развитием идеи, предложенной в [35]. Схема двухрешеточного проекционного устройства 2 показана на фиг. 2. Проекционное устройство 2 включает в себя источник света 10, который также будем называть осветителем, и две параллельные плоские одномерные периодические пропускающие решетки 11 и 12. Полосы этих решеток имеют одинаковое направление. Первая, ближняя к осветителю 10, решетка 11 и вторая, выходная, решетка 12 расположены с одной стороны от осветителя 10. Осветитель 10 и решетки 11 и 12 являются пространственно протяженными в направлении, перпендикулярном нормали к поверхностям решеток и направлению их полос. Предпочтительно, чтобы решетки 11 и 12 имели прямоугольную форму. Осветитель 10 и решетки 11 и 12 могут быть непосредственно укреплены в корпусе проектора 2 или вставлены в оправы (на фигурах не показаны), которые укреплены в корпусе проектора 2. В частном случае корпус проекционного устройства 2 или внутренняя поверхность этого корпуса могут быть изготовлены из материала, хорошо поглощающего свет. Светящаяся поверхность осветителя 10 обращена к решеткам 11 и 12. Осветитель 10 излучает некогерентный свет по крайней мере в одном диапазоне, принадлежащем видимой области и соседним с ней спектральным областям. В частном случае протяженный источник света 10, установленный в проекционном устройстве 2, является пространственно однородным источником диффузного света. Таким источником диффузного света может являться, например, люминесцентная лампа, люминесцентный или светодиодный экран, поверхность органического светоизлучающего диода, поверхность случайного фазового транспаранта, например, матового стекла, листа кальки или папиросной бумаги, освещаемая с противоположной от решеток стороны. Источником света 10, который установлен в проекционном устройстве 2, также может являться светоизлучающий экран дисплея, монитора, телефона, телевизора. В частном случае в проекционном устройстве 2 может быть использован осветитель 10, который позволяет управляемо изменять временные характеристики излучаемого света, например, длительность и скважность световых импульсов. На фиг.1(а, б) и фиг. 2 изображена правая ортогональная система координат с осями x, y и z, которая связана с проекционным устройством 2. Ось координат z направлена перпендикулярно плоскостям решеток 11 и 12 в направлении от источника света 10 к решетам 11 и 12. Если вторая решетка 12 имеет прямоугольную форму, то ось z проходит через ее центр, и называется далее по тексту оптической осью проекционного устройства 2. Ось y направлена вдоль направления полос решеток 11 и 12 (см. фиг. 2). Коэффициенты пропускания решеток 11 и 12 зависят периодически от координаты x. Пространственные периоды первой и второй решетки равны  и
и  соответственно. Направление оси z далее по тексту будем называть продольным, направления, перпендикулярные оси z, будем называть поперечными. Будем называть размеры проекционного устройства 2, рабочих апертур источника света 10, решеток 11 и 12 и т.д. в направлении оси x – их шириной, в направлении оси y – высотой, в направлении оси z – длиной или толщиной. Плоскость
соответственно. Направление оси z далее по тексту будем называть продольным, направления, перпендикулярные оси z, будем называть поперечными. Будем называть размеры проекционного устройства 2, рабочих апертур источника света 10, решеток 11 и 12 и т.д. в направлении оси x – их шириной, в направлении оси y – высотой, в направлении оси z – длиной или толщиной. Плоскость  совпадает с плоскостью первой решетки 11. Вторая, выходная, решетка 12 расположена в плоскости
совпадает с плоскостью первой решетки 11. Вторая, выходная, решетка 12 расположена в плоскости  (см. фиг. 2), т.е. плоскости первой и второй решеток удалены друг от друга на расстояние
(см. фиг. 2), т.е. плоскости первой и второй решеток удалены друг от друга на расстояние  . Полагаем, что рабочая поверхность осветителя 10 параллельна плоскостям решеток 11 и 12, а также, что она и решетки 11 и 12 имеют форму прямоугольников, стороны которых параллельны осям x и y (см. фиг. 2). Ширина рабочей апертуры осветителя 10 равна
. Полагаем, что рабочая поверхность осветителя 10 параллельна плоскостям решеток 11 и 12, а также, что она и решетки 11 и 12 имеют форму прямоугольников, стороны которых параллельны осям x и y (см. фиг. 2). Ширина рабочей апертуры осветителя 10 равна  , ее высота равна
, ее высота равна  . Ширина рабочей апертуры решетки 11 и решетки 12 равна
. Ширина рабочей апертуры решетки 11 и решетки 12 равна  и
и  соответственно, а их высота равна
соответственно, а их высота равна  и
и  соответственно. Центры рабочей поверхности осветителя 10, а также первой решетки 11 и второй решетки 12 расположены на оптической оси проекционного устройства, т.е. центры этих элементов проекционного устройства 2 имеют поперечные координаты
соответственно. Центры рабочей поверхности осветителя 10, а также первой решетки 11 и второй решетки 12 расположены на оптической оси проекционного устройства, т.е. центры этих элементов проекционного устройства 2 имеют поперечные координаты  ,
,  . Расстояние в продольном направлении между рабочей поверхностью осветителя 10 и плоскостью первой решетки 11 будем обозначать
. Расстояние в продольном направлении между рабочей поверхностью осветителя 10 и плоскостью первой решетки 11 будем обозначать  . Оно может быть равно нулю. Расстояние в продольном направлении от второй решетки 12 при
. Оно может быть равно нулю. Расстояние в продольном направлении от второй решетки 12 при  будем называть расстоянием от проекционного устройства 2. На фиг. 1 (а, б) также изображена глобальная неподвижная система координат с осями
будем называть расстоянием от проекционного устройства 2. На фиг. 1 (а, б) также изображена глобальная неподвижная система координат с осями  ,
,  и
и  . В частном случае может быть дополнительно использовано устройство для определения координат и ориентации подвижного аппарата 1 в глобальной системе координат, например, в системе GPS или ГЛОНАСС.
. В частном случае может быть дополнительно использовано устройство для определения координат и ориентации подвижного аппарата 1 в глобальной системе координат, например, в системе GPS или ГЛОНАСС.
В частном случае в проекционном устройстве 2 может быть использовано устройство, которое контролируемо изменяет расстояние между решетками 11 и 12 в продольном направлении или осуществляет сближение или удаление решеток 11 и 12 в этом направлении с заданной скоростью. Дополнительно может иметься устройство для поступательного перемещения по меньшей мере одной из решеток 11 и 12 в ее плоскости в направлении координаты x, что приводит к изменению фазы квазипериодической муаровой структуры, формируемой проекционным устройством 2 (см. [35]). Устройства, которые в разных частных случаях реализации проектора могут осуществлять перемещение решеток 11 и 12, на фигурах не показаны.
Амплитудные коэффициенты пропускания решеток, которые установлены в проекционном устройстве 2, в общем случае могут быть комплексными. В частном случае в проекционном устройстве 2 может быть установлена по меньшей мере одна решетка, имеющая действительный положительный амплитудный коэффициент пропускания, которая называется амплитудной решеткой. В частном случае по меньшей мере одна решетка, установленная в проекционном устройстве 2, является 1D амплитудной решеткой с синусоидальной зависимостью величины изменения амплитудного коэффициента пропускания от координаты x [35 - 37]. В другом частном случае по меньшей мере одна решетка может быть 1D амплитудной решеткой, которая имеет бинарную зависимость коэффициента пропускания от поперечной координаты, например, представляет собой периодически чередующиеся вдоль координаты x прозрачные и непрозрачные параллельные прямоугольные полосы, которые имеют резкие границы (см. фиг. 2) [35, 38 – 45]. Такие решетки также называются периодическими бинарными растрами. Коэффициент заполнения бинарного растра равен  , где
, где  - период решетки,
- период решетки,  - ширина ее прозрачных полос, здесь индекс
- ширина ее прозрачных полос, здесь индекс  , равный 1 или 2, обозначает порядковый номер решетки в проекционном устройстве 2. Амплитудный бинарный растр с
, равный 1 или 2, обозначает порядковый номер решетки в проекционном устройстве 2. Амплитудный бинарный растр с  также называется решеткой Ронки. Достоинством использования в проекционном устройстве периодических бинарных растров является простота изготовления этих решеток и их коммерческая доступность. В еще одном частном случае в проекционном устройстве 2 может использоваться по меньшей мере одна фазовая решетка, т.е. решетка с периодической зависимостью фазы амплитудного коэффициента пропускания от поперечной координаты и постоянным модулем этого коэффициента [42, 46]. В качестве еще одной альтернативы в проекционном устройстве можно использовать по меньшей мере одну решетку, объединяющую в себе амплитудную и фазовую решетку [42, 47, 48]. Амплитудные, фазовые и амплитудно-фазовые решетки изготавливаются известными фотографическими, голографическими, литографическими, печатными и другими методами. Решетки некоторых упомянутых типов коммерчески доступны [43 – 46]. В частном случае в проекционном устройстве 2 может быть использована по меньшей мере одна решетка, характеристики которой можно изменять. Например, по меньшей мере одной из решеток, установленных в оптическом проекционном устройстве 2, может быть амплитудный бинарный растр, у которого коэффициент заполнения и/или период можно изменять. В частном случае для формирования по меньшей мере одной из решеток, установленных в проекционном устройстве 2, может быть использован пространственный модулятор света.
также называется решеткой Ронки. Достоинством использования в проекционном устройстве периодических бинарных растров является простота изготовления этих решеток и их коммерческая доступность. В еще одном частном случае в проекционном устройстве 2 может использоваться по меньшей мере одна фазовая решетка, т.е. решетка с периодической зависимостью фазы амплитудного коэффициента пропускания от поперечной координаты и постоянным модулем этого коэффициента [42, 46]. В качестве еще одной альтернативы в проекционном устройстве можно использовать по меньшей мере одну решетку, объединяющую в себе амплитудную и фазовую решетку [42, 47, 48]. Амплитудные, фазовые и амплитудно-фазовые решетки изготавливаются известными фотографическими, голографическими, литографическими, печатными и другими методами. Решетки некоторых упомянутых типов коммерчески доступны [43 – 46]. В частном случае в проекционном устройстве 2 может быть использована по меньшей мере одна решетка, характеристики которой можно изменять. Например, по меньшей мере одной из решеток, установленных в оптическом проекционном устройстве 2, может быть амплитудный бинарный растр, у которого коэффициент заполнения и/или период можно изменять. В частном случае для формирования по меньшей мере одной из решеток, установленных в проекционном устройстве 2, может быть использован пространственный модулятор света.
Расстояние между рабочей поверхностью осветителя 10 и плоскостью первой решетки 11 может быть равно нулю, и их роль может выполнять один элемент проекционного устройства 2, который будем называть решетчатым осветителем. Решетчатый осветитель излучает некогерентный свет по крайней мере в одном спектральном диапазоне, принадлежащем инфракрасной, видимой и ультрафиолетовой области. На фиг. 3, фиг. 4 и фиг. 5 изображены схемы проекционного устройства 2 в частных случаях его реализации, когда в проекционном устройстве 2 установлена одна пропускающая одномерная периодическая решетка 12, которая является выходной, и нем использован решетчатый осветитель 13, у которого светящиеся поверхности индивидуальных источников света периодически расположены в плоскости, параллельной плоскости выходной решетки 12. Эта плоскость удалена от плоскости выходной решетки 12 на расстояние  . На фиг. 3 - фиг. 5 изображена правая ортогональная система координат с осями x, y и z, которая связана с проекционным устройством 2. Продольная ось координат z направлена от решетчатого осветителя 13 к решетке 12 перпендикулярно ее плоскости. Плоскость
. На фиг. 3 - фиг. 5 изображена правая ортогональная система координат с осями x, y и z, которая связана с проекционным устройством 2. Продольная ось координат z направлена от решетчатого осветителя 13 к решетке 12 перпендикулярно ее плоскости. Плоскость  совпадает со светящейся поверхностью решетчатого осветителя 13. Выходной решеткой 12, которая установлена в проекторе 2, может являться амплитудная, фазовая или амплитудно-фазовая решетка. Пространственный период решетчатого осветителя 13
совпадает со светящейся поверхностью решетчатого осветителя 13. Выходной решеткой 12, которая установлена в проекторе 2, может являться амплитудная, фазовая или амплитудно-фазовая решетка. Пространственный период решетчатого осветителя 13  больше ширины рабочей поверхности индивидуального источника света, которая обозначается
больше ширины рабочей поверхности индивидуального источника света, которая обозначается  . Ширина рабочей апертуры осветителя 13 равна , ее высота равна (см. фиг. 3, фиг. 4 и фиг. 5). На фиг. 3 изображена схема проектора 2, в котором осветителем 13 является одномерная периодическая решетка относительно узких источников света 14 (
. Ширина рабочей апертуры осветителя 13 равна , ее высота равна (см. фиг. 3, фиг. 4 и фиг. 5). На фиг. 3 изображена схема проектора 2, в котором осветителем 13 является одномерная периодическая решетка относительно узких источников света 14 ( ) [49 - 52], у которых полосы светящихся поверхностей направлены параллельно полосам выходной решетки 12. В качестве такого осветителя может использоваться, например, светоизлучающая 1D периодическая решетка на плоской поверхности полупроводникового светодиода, описанная в патентах [50 - 52], а также 1D периодическая светоизлучающая структура, отображаемая на поверхности, например, жидкокристаллического, светодиодного, плазменного или люминесцентного экрана монитора, дисплея, телефона, телевизора и т.п. На фиг. 4 изображена схема проекционного устройства 2, в котором использован осветитель 13, представляющий собой периодическую линейку источников света 15, центры светящихся поверхностей которых расположены на линии, параллельной плоскости выходной решетки 12 и перпендикулярной направлению ее полос. На фиг. 5 изображена схема проекционного устройства 2, в котором использован осветитель 13, представляющий собой прямоугольную матрицу источников света 16, светящиеся поверхности которых расположены периодически в плоскости, параллельной плоскости выходной решетки 12, а столбцы матрицы источников света параллельны направлению полос решетки 12. Прямоугольная матрица источников света 16 также может быть ориентирована так, что ее строки или диагонали прямоугольников, в вершинах которых расположены четыре ближайших друг к другу источника света (элемента матрицы) 16, параллельны направлению полос выходной решетки 12 [53]. В осветителе 13, представляющем собой линейку или матрицу источников света, индивидуальными источниками света 14 - 16 могут служить, например, светодиоды. В частных случаях в проекционном устройстве 2 может быть использован решетчатый осветитель 13, у которого можно управляемо изменять пространственные характеристики, например, период, коэффициент заполнения и/или временные характеристики, например, длительность и/или скважность световых импульсов. Пространственные и временные характеристики решетчатого осветителя можно изменять, например, способами, описанными в [52, 53]. В частном случае в проекционном устройстве 2 в качестве управляемого или неуправляемого решетчатого осветителя 13 может быть использован экран дисплея, монитора, телефона, телевизора и т.п.
) [49 - 52], у которых полосы светящихся поверхностей направлены параллельно полосам выходной решетки 12. В качестве такого осветителя может использоваться, например, светоизлучающая 1D периодическая решетка на плоской поверхности полупроводникового светодиода, описанная в патентах [50 - 52], а также 1D периодическая светоизлучающая структура, отображаемая на поверхности, например, жидкокристаллического, светодиодного, плазменного или люминесцентного экрана монитора, дисплея, телефона, телевизора и т.п. На фиг. 4 изображена схема проекционного устройства 2, в котором использован осветитель 13, представляющий собой периодическую линейку источников света 15, центры светящихся поверхностей которых расположены на линии, параллельной плоскости выходной решетки 12 и перпендикулярной направлению ее полос. На фиг. 5 изображена схема проекционного устройства 2, в котором использован осветитель 13, представляющий собой прямоугольную матрицу источников света 16, светящиеся поверхности которых расположены периодически в плоскости, параллельной плоскости выходной решетки 12, а столбцы матрицы источников света параллельны направлению полос решетки 12. Прямоугольная матрица источников света 16 также может быть ориентирована так, что ее строки или диагонали прямоугольников, в вершинах которых расположены четыре ближайших друг к другу источника света (элемента матрицы) 16, параллельны направлению полос выходной решетки 12 [53]. В осветителе 13, представляющем собой линейку или матрицу источников света, индивидуальными источниками света 14 - 16 могут служить, например, светодиоды. В частных случаях в проекционном устройстве 2 может быть использован решетчатый осветитель 13, у которого можно управляемо изменять пространственные характеристики, например, период, коэффициент заполнения и/или временные характеристики, например, длительность и/или скважность световых импульсов. Пространственные и временные характеристики решетчатого осветителя можно изменять, например, способами, описанными в [52, 53]. В частном случае в проекционном устройстве 2 в качестве управляемого или неуправляемого решетчатого осветителя 13 может быть использован экран дисплея, монитора, телефона, телевизора и т.п.
В частных случаях, в проекционном устройстве 2 может быть применено устройство, которое контролируемо изменяет расстояние в продольном направлении между выходной решеткой 12 и решетчатым осветителем 13 или осуществляет их сближение или удаление в этом направлении с заданной скоростью. Дополнительно может иметься устройство для поступательного перемещения выходной решетки 12 или решетчатого осветителя 13 в направлении координаты x. Устройства, которые в разных частных случаях реализации проектора могут осуществлять перемещение выходной решеткой 12 или решетчатого осветителя 13, на фигурах не показаны.
В частном случае реализации системы обнаружения и определения положения объектов около подвижного аппарата наблюдение за областью пространства, которая освещается проекционным устройством 2 структурированным светом видимого диапазона, осуществляется водителем транспортного средства. Изображение этой области регистрируется им «невооруженным глазом».
В предпочтительном частном случае реализации системы обнаружения и определения положения объектов около подвижного аппарата регистрация изображения объектов, расположенных в области пространства, которая освещается проекционным устройством 2, осуществляется по меньшей мере одним устройством регистрации изображений 3 (см. фиг. 1 (а, б) и фиг. 6 - 9). Устройством регистрации изображений 3 может являться, например, телекамера или фотокамера. Объектив 4 устройства регистрации изображений 3 проецирует падающий на него свет на датчик изображений 17 (см. фиг. 6). Датчиком изображений 17 в устройстве регистрации изображений 3 служит, например, ПЗС (прибор с зарядовой связью) или КМОП (комплиментарная структура металл-оксид-полупроводник) матрица. Перед объективом 4 устройства регистрации изображений 3 может быть установлен оптический фильтр, который, например, пропускает свет только в спектральном диапазоне, в котором излучается свет проекционным устройством 2. Оптическая ось устройства регистрации изображений 3 может быть параллельна продольной оси проекционного устройства 2. Предпочтительно перед использованием устройства регистрации изображений 3 для осуществления предлагаемого способа провести его калибровку известными методами, например, с помощью шаблона в виде шахматной доски [54, 55]. В частном случае в системе дополнительно используется дисплей (на фигурах не показан), на экране которого отображаются изображения, регистрируемые устройством регистрации изображений 3.
В частном случае проекционное устройство 2 и/или по меньшей мере одно устройство регистрации изображений 3 могут быть жестко закреплены на подвижном аппарате 1. В другом частном случае они могут поворачиваться относительно подвижного аппарата 1 и/или перемещаться по нему поступательно. Устройства, с помощью которых осуществляется изменение положения и ориентации проекционного устройства 2 и/или устройства регистрации изображений 3, также изменение положения отдельных элементов проекционного устройства 2 на фигурах не показаны. Они общеизвестны и коммерчески доступны.
Вычислительное устройство 5 предназначено для математической обработки изображений, полученных устройством регистрации изображений 3. Вычислительное устройство 5 представляет собой, например, компьютер, мобильное вычислительное устройство или программируемую логическую интегральную схему (ПЛИС). Вычислительное устройство 5 кроме хранения и обработки информации, полученной от устройства регистрации изображений 3, может осуществлять обработку и хранение данных, полученных от других устройств системы и других устройств подвижного аппарата, а также осуществлять управление ими и их элементами. В частности, оно может осуществлять обработку и хранение данных о величинах перемещения и углах поворота проекционного устройства 2, устройства регистрации изображений 3, а также о величинах перемещения решеток 11 и 12, осветителя 13, которые поступают с устройств, регистрирующих эти величины. Вычислительное устройство 5 связано с другими устройствами системы обнаружения и определения положения объектов и другими устройствами подвижного аппарата с помощью проводов и/или беспроводным образом. Оно также может быть связано с другими вычислительными устройствами, в частности, с внешними вычислительными устройствами, например, через мобильный интернет, Wi-Fi или Bluetooth. В частном случае вычислительное устройство 5 может быть связано и может управлять дисплеем (на фигурах не показан), который предназначен для отображения изображений, регистрируемых устройством регистрации изображений 3. В частном случае изображения с устройства регистрации изображений 3 могут передаваться на дисплей после обработки вычислительным устройством 5. Вычислительное устройство 5 может быть связано со звуковым устройством, которое может быть установлено на подвижном аппарате 1 (на фигурах не показано) и предназначено для предупреждения водителя звуковым сигналом о присутствии объекта или препятствия вблизи подвижного аппарата 1.
В частном случае, когда в проекционном устройстве 2 установлены две параллельные одномерные амплитудные решетки 11 и 12 (см. фиг. 2 и фиг.6), штрихи которых направлены параллельно, проекционное устройство 2 работает следующим образом. Свет, излучаемый осветителем 10, проходит сначала через первую решетку 11, затем через вторую решетку 12. При прохождении света через амплитудную решетку происходит пространственная модуляция его интенсивности, поэтому за каждой из решеток 11 и 12 наблюдаются периодические полосы света и тени. При освещении решетки некогерентным светом от протяженного источника или диффузным светом контраст полос света и тени уменьшается по мере удаления от пропускающей решетки в продольном направлении. На достаточно большом расстоянии от решетки интенсивность света становится почти постоянной в пространстве. Однако при прохождении света через пару параллельных решеток 11 и 12 существуют плоскости, параллельные плоскостям решеток и удаленные от них в продольном направлении на известные расстояния, в окрестности которых проекционное устройство 2 может сформировать световые муаровые структуры, представляющие собой периодические в пространстве области света и тени [35, 38 - 40, 56 - 63]. При проецировании этих световых муаровых структур на плоскость, параллельную плоскостям решеток, наблюдаются периодические светлые и темные полосы, которые направлены вдоль оси y [35, 40]. Такую ЛМ структуру также называют псевдоизображением решетки [39, 57, 58, 60 - 62] и теневым эхом [35, 63, 64]. Муаровые структуры, формируемые двухрешеточным проекционным устройством с 1D решетками, обозначаются двумя индексами (N,M), где N и M - натуральные числа. Расстояние от плоскости выходной решетки 12 проекционного устройства 2 до плоскости, где контраст муаровой структуры (N,M) наибольший, вычисляют по формуле

где  , и - пространственные периоды первой и второй решетки соответственно [35, 38, 58 - 60]. Для того, чтобы возникала муаровая структура (N,M), величина
, и - пространственные периоды первой и второй решетки соответственно [35, 38, 58 - 60]. Для того, чтобы возникала муаровая структура (N,M), величина  должна быть больше 1. Координата плоскости, где контраст муаровой структуры (N,M) имеет наибольшую величину, равна
должна быть больше 1. Координата плоскости, где контраст муаровой структуры (N,M) имеет наибольшую величину, равна  , где
, где

Эту плоскость будем называть плоскостью наибольшего контраста локализованной муаровой структуры (N,M). Зависимость интенсивности света от координаты x вблизи плоскости наибольшего контраста муаровой структуры (N,M) описывается периодической функцией обычно близкой к синусоиде, пространственный период  которой вычисляют по формуле [35, 38, 58 - 60]
которой вычисляют по формуле [35, 38, 58 - 60]

Контраст (видность) муаровой структуры (N,M) вычисляют по формуле

где  и
и  - максимальное и минимальное значение интенсивности света в плоскости z = const [35, 60, 62]. Расстояние в направлении оси x между точками, в которых определяются величины и
- максимальное и минимальное значение интенсивности света в плоскости z = const [35, 60, 62]. Расстояние в направлении оси x между точками, в которых определяются величины и  , равно
, равно  , где
, где  - натуральное число, включая ноль. Контраст муаровой структуры (N,M) зависит от продольной координаты z, и эта зависимость описывается формулой [35]
- натуральное число, включая ноль. Контраст муаровой структуры (N,M) зависит от продольной координаты z, и эта зависимость описывается формулой [35]

где  - значение контраста муаровой структуры (N,M) в плоскости . Значение функции
- значение контраста муаровой структуры (N,M) в плоскости . Значение функции  при максимально и равно 1. Пространственное распределение интенсивности света в плоскости
при максимально и равно 1. Пространственное распределение интенсивности света в плоскости  недалеко от линии
недалеко от линии  условно изображено на фиг. 6 и обозначено цифрой 18. Ширина по полувысоте (FWHM) функции
условно изображено на фиг. 6 и обозначено цифрой 18. Ширина по полувысоте (FWHM) функции  равна глубине резкости
равна глубине резкости  муаровой структуры (N,M), где
муаровой структуры (N,M), где  . Глубина резкости
. Глубина резкости  равна удвоенному значению длины, при удалении на которую в продольном направлении от плоскости контраст муаровой структуры (N,M) уменьшается в два раза по сравнению со значением ее контраста в плоскости .
равна удвоенному значению длины, при удалении на которую в продольном направлении от плоскости контраст муаровой структуры (N,M) уменьшается в два раза по сравнению со значением ее контраста в плоскости .
В определенном диапазоне параметров проекционного устройства 2 и его элементов им формируются световые муаровые структуры, которые относительно сильно локализованы в продольном направлении [35]. Локальность муаровой структуры (N,M) означает, что ее глубина резкости значительно меньше расстояния от проекционного устройства 2 до плоскости, на которой контраст этой муаровой структуры имеет наибольшее значение, т.е. относительная глубина резкости муаровой структуры (N,M)  , например, меньше 0,25.
, например, меньше 0,25.
Ширина ЛМ структуры (N,M), формируемой проекционным устройством с двумя тонкими 1D амплитудными решетками 11 и 12, в плоскости равна [35] (см. фиг. 6)

где  - полуширина в плоскости
- полуширина в плоскости  углового спектра света, излучаемого малыми областями рабочей поверхности осветителя 10 с однородной плоской светящейся поверхностью. Локализованная муаровая структура (N,M) имеет наибольший контраст и наименьшую глубину резкости вблизи плоскости
углового спектра света, излучаемого малыми областями рабочей поверхности осветителя 10 с однородной плоской светящейся поверхностью. Локализованная муаровая структура (N,M) имеет наибольший контраст и наименьшую глубину резкости вблизи плоскости  . В окрестности этой плоскости есть область шириной
. В окрестности этой плоскости есть область шириной  (см. [35]), в пределах которой контраст и глубина резкости ЛМ структуры (N,M) при изменении x не изменяются или изменяются мало, например, меньше, чем в 1,2 раза. Ширину этой центральной области ЛМ структуры (N,M) можно оценить по формуле [35]
(см. [35]), в пределах которой контраст и глубина резкости ЛМ структуры (N,M) при изменении x не изменяются или изменяются мало, например, меньше, чем в 1,2 раза. Ширину этой центральной области ЛМ структуры (N,M) можно оценить по формуле [35]

Если корпус проектора и оправы, ограничивающие первую и вторую решетку, не виньетируют осветитель 10 в направлении координаты x при его наблюдении из центральной области ЛМ структуры (N,M), что имеет место, в частности, если ширина рабочей апертуры решеток 11 и 12 больше или равна ширине рабочей апертуры осветителя 10, тогда при  глубину резкости ЛМ структуры (N,M) в области
глубину резкости ЛМ структуры (N,M) в области  можно оценить по формуле [35]
можно оценить по формуле [35]

где  - наименьшая из величин
- наименьшая из величин  и
и  , где - угловой размер половины рабочей апертуры осветителя в плоскости
, где - угловой размер половины рабочей апертуры осветителя в плоскости  при наблюдении из точки с координатами
при наблюдении из точки с координатами  , и , равный
, и , равный

Такая же оценка глубины резкости муаровой структуры (N,M) в случае  была сделана в [59, 61, 65]. Как следует из формул (6) и (7), увеличивая ширину осветителя, а также ширину решеток, можно увеличивать ширину ЛМ структуры (N,M). Возможность увеличения ширины ЛМ структур ограничивается допустимой шириной проекционного устройства 2. Таким образом, предлагаемая в изобретении система обнаружения и определения положения объектов является широкопольной.
была сделана в [59, 61, 65]. Как следует из формул (6) и (7), увеличивая ширину осветителя, а также ширину решеток, можно увеличивать ширину ЛМ структуры (N,M). Возможность увеличения ширины ЛМ структур ограничивается допустимой шириной проекционного устройства 2. Таким образом, предлагаемая в изобретении система обнаружения и определения положения объектов является широкопольной.
Формулы (6) - (8) позволяют сделать приблизительную оценку ширины муаровой структуры (N,M), ширины ее центральной области и глубины резкости. Для повышения точности и надежности предлагаемого способа предпочтительно предварительно провести измерения зависимости контраста муаровой структуры (N,M) от продольной координаты z и поперечной координаты x, и на основании данных этих экспериментов найти  и определить ошибку измерений расстояния до объектов и их положения. Ошибка определения продольного расстояния от проекционного устройства 2 до объекта 8 или его какой-то части пропорциональна глубине резкости муаровой структуры и обычно не превосходит величины . Для осуществления предлагаемого способа предпочтительно использовать ЛМ структуру с относительной глубиной резкости меньше 10%.
и определить ошибку измерений расстояния до объектов и их положения. Ошибка определения продольного расстояния от проекционного устройства 2 до объекта 8 или его какой-то части пропорциональна глубине резкости муаровой структуры и обычно не превосходит величины . Для осуществления предлагаемого способа предпочтительно использовать ЛМ структуру с относительной глубиной резкости меньше 10%.
Локализованная муаровая структура может формироваться в зоне геометрической оптики (ГО) и в зоне дифракции Френеля проекционного устройства 2. Влияние дифракции на решетках 11 и 12 на характеристики ЛМ структуры (N,M) можно не учитывать, если первая и вторая решетка расположены недалеко друг от друга, так, что расстояние между их плоскостями удовлетворяет условию (см. [35, 63, 64])

где длину  вычисляют по формуле
вычисляют по формуле

величина  равна
равна  , где
, где  - центральная длина волны света, излучаемого осветителем,
- центральная длина волны света, излучаемого осветителем,  - полуширина спектра света по длине волны по уровню
- полуширина спектра света по длине волны по уровню  . В случае, когда параметры двухрешеточного проектора 2 и параметры его элементов таковы, что влияние дифракции света на амплитудных решетках 11 и 12 на характеристики ЛМ структур пренебрежимо мало, для описания характеристик муаровых структур, формируемых таким проектором, применимо приближение геометрической оптики. В приближении геометрической оптики характеристики муаровых структур не зависят от длины волны света, поэтому в проекционном устройстве в качестве осветителя может быть использован источник как монохроматического, так и немонохроматического света, в частности, источник широкополосного света, например, белого света. В зоне ГО контраст ЛМ структуры не зависит от расстояния между решетками. Решеточное устройство, которое формирует муаровые структуры (псевдоизображения решетки) в зоне дифракции Френеля, в ряде публикаций называется интерферометром Тальбота-Лау [47, 66, 67]. Для достижения высокого контраста ЛМ структуры (1,1) в зоне дифракции Френеля нужно, чтобы расстояние между решетками 11 и 12 было в пределах ограниченных интервалов, номер которых
. В случае, когда параметры двухрешеточного проектора 2 и параметры его элементов таковы, что влияние дифракции света на амплитудных решетках 11 и 12 на характеристики ЛМ структур пренебрежимо мало, для описания характеристик муаровых структур, формируемых таким проектором, применимо приближение геометрической оптики. В приближении геометрической оптики характеристики муаровых структур не зависят от длины волны света, поэтому в проекционном устройстве в качестве осветителя может быть использован источник как монохроматического, так и немонохроматического света, в частности, источник широкополосного света, например, белого света. В зоне ГО контраст ЛМ структуры не зависит от расстояния между решетками. Решеточное устройство, которое формирует муаровые структуры (псевдоизображения решетки) в зоне дифракции Френеля, в ряде публикаций называется интерферометром Тальбота-Лау [47, 66, 67]. Для достижения высокого контраста ЛМ структуры (1,1) в зоне дифракции Френеля нужно, чтобы расстояние между решетками 11 и 12 было в пределах ограниченных интервалов, номер которых  = 1, 2, 3, … последовательно возрастает с ростом расстояния между решетками
= 1, 2, 3, … последовательно возрастает с ростом расстояния между решетками  , при этом полуширина по длине волны спектра света, излучаемого осветителем 10, должна быть меньше, чем
, при этом полуширина по длине волны спектра света, излучаемого осветителем 10, должна быть меньше, чем  [35, 60, 61]. Например, при
[35, 60, 61]. Например, при  для более высокого контраста ЛМ структуры (1,1) предпочтительно, чтобы расстояние между решетками
для более высокого контраста ЛМ структуры (1,1) предпочтительно, чтобы расстояние между решетками  было в диапазонах от
было в диапазонах от  до
до  .
.
Формулы (1) - (11) также могут быть использованы для оценки характеристик ЛМ структур, создаваемых проекционным устройством с одной решеткой 12 и решетчатым осветителем 13. В этом случае - это полуширина в плоскости  углового спектра света, излучаемого индивидуальным источником света решетчатого осветителя.
углового спектра света, излучаемого индивидуальным источником света решетчатого осветителя.
Одним проекционным устройством может одновременно формироваться несколько ЛМ структур. Предпочтительно использовать для осуществления предлагаемого способа ЛМ структуры с достаточно высоким контрастом, например, наибольшее значение контраста у такой ЛМ структуры должно превышать величину 0,2. В частном случае, когда первая решетка 11 и вторая решетка 12 в проекционном устройстве 2 являются решетками Ронки (), в области геометрической оптики могут формироваться относительно контрастные муаровые структуры (1,1), (1,3) и (3,1). Условием возникновения каждой из них является неравенство  , здесь N и M равны 1 или 3. Наибольший контраст муаровой структуры (1,1) при
, здесь N и M равны 1 или 3. Наибольший контраст муаровой структуры (1,1) при  в зоне ГО примерно равен
в зоне ГО примерно равен  0,9. Наибольшее значение контраста муаровых структур (1,3) и (3,1) равно примерно 0,3. Остальные муаровые структуры (N,M), формируемые проекционным устройством с двумя решетками Ронки, в зоне ГО имеют контраст менее 0,2.
0,9. Наибольшее значение контраста муаровых структур (1,3) и (3,1) равно примерно 0,3. Остальные муаровые структуры (N,M), формируемые проекционным устройством с двумя решетками Ронки, в зоне ГО имеют контраст менее 0,2.
Приведем численный пример, в котором определим характеристики муаровых структур, формируемых проекционным устройством 2 с двумя тонкими амплитудными решетками 11 и 12 (см. фиг. 2), например, с решетками Ронки. Полагаем, что периоды решеток 11 и 12 равны  = 1,2 мм и
= 1,2 мм и  = 1 мм соответственно, а глубина модуляции функции пропускания этих решеток равна
= 1 мм соответственно, а глубина модуляции функции пропускания этих решеток равна  = 1. Расстояние между первой решеткой 11 и второй решеткой 12 равно
= 1. Расстояние между первой решеткой 11 и второй решеткой 12 равно  = 40 см. Осветитель 10 является пространственно однородным источником света. Он расположен вплотную к первой решетке 11, т.е.
= 40 см. Осветитель 10 является пространственно однородным источником света. Он расположен вплотную к первой решетке 11, т.е.  . Осветитель 10 и первая решетка 11 имеют равную ширину
. Осветитель 10 и первая решетка 11 имеют равную ширину  = 40 см. Вторая решетка 12 имеет ширину
= 40 см. Вторая решетка 12 имеет ширину  = 50 см. Осветитель 10 излучает диффузный свет в диапазоне
= 50 см. Осветитель 10 излучает диффузный свет в диапазоне  мкм. Полуширина в плоскости
мкм. Полуширина в плоскости  углового спектра света, излучаемого малыми некогерентными элементами поверхности осветителя,
углового спектра света, излучаемого малыми некогерентными элементами поверхности осветителя,  равна 10°. Проекционным устройством 2 с такими параметрами формируются две муаровые структуры с контрастом более 0,2: это муаровые структуры (1,1) и (1,3). Расстояния
равна 10°. Проекционным устройством 2 с такими параметрами формируются две муаровые структуры с контрастом более 0,2: это муаровые структуры (1,1) и (1,3). Расстояния  между решетками 11 и 12 меньше, чем расстояние
между решетками 11 и 12 меньше, чем расстояние  = 48 см, поэтому влиянием дифракции света на характеристики муаровой структуры (1,1) можно пренебречь. Пространственный период муаровой структуры (1,1) равен
= 48 см, поэтому влиянием дифракции света на характеристики муаровой структуры (1,1) можно пренебречь. Пространственный период муаровой структуры (1,1) равен  = 6 мм. Эта муаровая структура будет иметь наибольший контраст
= 6 мм. Эта муаровая структура будет иметь наибольший контраст  ≈ 0,9 в плоскости, удаленной от второй решетки 12 на расстояние
≈ 0,9 в плоскости, удаленной от второй решетки 12 на расстояние  = 200 см. Ширина ЛМ структуры (1,1) равна
= 200 см. Ширина ЛМ структуры (1,1) равна  125 см, ширина ее центральной области равна
125 см, ширина ее центральной области равна  44,6 см. Глубина резкости муаровой структуры (1,1) в ее центральной области равна
44,6 см. Глубина резкости муаровой структуры (1,1) в ее центральной области равна  4,3 см. Относительная глубина резкости муаровой структуры (1,1)
4,3 см. Относительная глубина резкости муаровой структуры (1,1)  примерно равна 2%.
примерно равна 2%.
Форма области на поверхности объекта 8, в пределах которой проекция 9 ЛМ структуры имеет относительно высокий контраст, зависит от размеров и формы поверхности объекта 8, а также глубины резкости муаровой структуры (N,M) (см. фиг. 1(б) и фиг. 6). Плоскость  , на которой контраст муаровой структуры (N,M) является постоянным, пересекается с поверхностью объекта 8 по плоской линии, называемой изолинией постоянного контраста ЛМ структуры. С плоскими поверхностями плоскость постоянного контраста пересекается по отрезкам прямых линий [35]. В частности, плоскость , где контраст муаровой структуры (N,M) является наибольшим, пересекается с поверхностью объекта 8 по плоской линии, которую будем называть изолинией наибольшего контраста ЛМ структуры. Плоскости
, на которой контраст муаровой структуры (N,M) является постоянным, пересекается с поверхностью объекта 8 по плоской линии, называемой изолинией постоянного контраста ЛМ структуры. С плоскими поверхностями плоскость постоянного контраста пересекается по отрезкам прямых линий [35]. В частности, плоскость , где контраст муаровой структуры (N,M) является наибольшим, пересекается с поверхностью объекта 8 по плоской линии, которую будем называть изолинией наибольшего контраста ЛМ структуры. Плоскости  и
и  , на которых контраст ЛМ структуры равен
, на которых контраст ЛМ структуры равен  , будем называть ближней и дальней (к проекционному устройству 2) плоскостью половинного контраста ЛМ структуры (N,M) соответственно. Эти плоскости пересекаются с поверхностью объекта 8 по плоским линиям, которые будем называть ближней и дальней изолиниями половинного контраста ЛМ структуры.
, будем называть ближней и дальней (к проекционному устройству 2) плоскостью половинного контраста ЛМ структуры (N,M) соответственно. Эти плоскости пересекаются с поверхностью объекта 8 по плоским линиям, которые будем называть ближней и дальней изолиниями половинного контраста ЛМ структуры.
Рассмотрим функционирование системы и осуществление способа обнаружения и определения положения объектов около подвижного аппарата в частном случае, когда
• проектор 2 на подвижном аппарате 1 установлен так, что полосы выходной решетки 12 направлены вертикально (см. фиг.1(а, б));
• положение проекционного устройства 2 и устройства регистрации изображений 3 на подвижном аппарате 1 не меняется;
• направление оптических осей проекционного устройства 2 (ось z) и устройства регистрации изображений 3 совпадают с направлением прямолинейного движения подвижного аппарата 1;
• параметры проекционного устройства 2 и его элементов таковы, что им формируется контрастная (с контрастом больше 0,2) ЛМ структура (N,M), характеристики которой известны и не меняются.
Полагаем также, что объект 8, расположенный на пути движения подвижного аппарата 1, является, во-первых, достаточно широкими, таким, что ширина проекции на плоскость  const части его поверхности, обращенной к выходной решетке 12 проектора 2, по крайней мере в два раза больше, чем период
const части его поверхности, обращенной к выходной решетке 12 проектора 2, по крайней мере в два раза больше, чем период  используемой ЛМ структуры, и, во-вторых, его поверхность, обращенная к подвижному аппарату 1, расположена под не очень большим углом к плоскости выходной решетки, таким, что тангенс угла между поверхностью объекта и плоскостью в областях их пересечения меньше, чем
используемой ЛМ структуры, и, во-вторых, его поверхность, обращенная к подвижному аппарату 1, расположена под не очень большим углом к плоскости выходной решетки, таким, что тангенс угла между поверхностью объекта и плоскостью в областях их пересечения меньше, чем  . Предпочтительно, чтобы плоскость с заданным значением контраста ЛМ структуры (N,M), например, дальняя плоскость ее половинного контраста, располагалась на расстоянии от подвижного аппарата 1, которое по крайней мере больше минимально необходимого для того, чтобы избежать столкновения с объектами, которые могут иметься на пути следования подвижного аппарата 1 при его движении с заданной, например, максимальной скоростью.
. Предпочтительно, чтобы плоскость с заданным значением контраста ЛМ структуры (N,M), например, дальняя плоскость ее половинного контраста, располагалась на расстоянии от подвижного аппарата 1, которое по крайней мере больше минимально необходимого для того, чтобы избежать столкновения с объектами, которые могут иметься на пути следования подвижного аппарата 1 при его движении с заданной, например, максимальной скоростью.
При выполнении указанных выше условий, способ обнаружения и определения положения объекта 8 около подвижного аппарата 1 при его движении осуществляется следующим образом. Область перед подвижным аппаратом 1 освещают светом, излучаемым проекционным устройством 2. Устройство регистрации изображений 3 фокусируют приблизительно на плоскость наибольшего контраста ЛМ структуры или другую выбранную параллельную ей плоскость в интервале от  до
до  . Предпочтительно, чтобы глубина резкости объектива 4 устройства регистрации изображений 3 была по крайней мере в два раза больше, чем глубина резкости муаровой структуры (N,M). Предпочтительно также, чтобы вся ЛМ структура (N,M) попадала в поле зрения устройства регистрации изображений 3. В противном случае предпочтительно использовать несколько устройств регистрации изображений. При поступательном движении подвижного аппарата 1 и/или его повороте происходит изменение взаимного положения проекционного устройства 2 и объекта 8. При каждом положении подвижного аппарата 1 изображение области пространства, освещаемой проекционным устройством 2, регистрируют устройством регистрации изображений 3. Предпочтительно, чтобы время регистрации одного изображения устройством регистрации изображений 3 (одного кадра или рабочей серии кадров) было по крайней мере в несколько раз меньше величины
. Предпочтительно, чтобы глубина резкости объектива 4 устройства регистрации изображений 3 была по крайней мере в два раза больше, чем глубина резкости муаровой структуры (N,M). Предпочтительно также, чтобы вся ЛМ структура (N,M) попадала в поле зрения устройства регистрации изображений 3. В противном случае предпочтительно использовать несколько устройств регистрации изображений. При поступательном движении подвижного аппарата 1 и/или его повороте происходит изменение взаимного положения проекционного устройства 2 и объекта 8. При каждом положении подвижного аппарата 1 изображение области пространства, освещаемой проекционным устройством 2, регистрируют устройством регистрации изображений 3. Предпочтительно, чтобы время регистрации одного изображения устройством регистрации изображений 3 (одного кадра или рабочей серии кадров) было по крайней мере в несколько раз меньше величины  , где
, где  - скорость движения аппарата 1 в данный момент времени. Используя вычислительное устройство 5, в реальном масштабе времени определяют распределения величины яркости изображений, зарегистрированных устройством регистрации изображений 3 при разном положении подвижного аппарата 1. Затем в реальном масштабе времени рассчитывают зависимости от 2D координат на изображениях величины контраста квазипериодического изменения яркости этих изображений с пространственным периодом и направлением полос, соответствующими ЛМ структуре (N,M). Для определения 2D распределения величины контраста используют известные математические методы обработки изображений. В частности, может быть использован Фурье или вейвлет анализ изображений, а также метод фазовых шагов [34, 35, 67, 68]. Если объект 8 удален от плоскости наибольшего контраста ЛМ структуры (N,M) более чем на
- скорость движения аппарата 1 в данный момент времени. Используя вычислительное устройство 5, в реальном масштабе времени определяют распределения величины яркости изображений, зарегистрированных устройством регистрации изображений 3 при разном положении подвижного аппарата 1. Затем в реальном масштабе времени рассчитывают зависимости от 2D координат на изображениях величины контраста квазипериодического изменения яркости этих изображений с пространственным периодом и направлением полос, соответствующими ЛМ структуре (N,M). Для определения 2D распределения величины контраста используют известные математические методы обработки изображений. В частности, может быть использован Фурье или вейвлет анализ изображений, а также метод фазовых шагов [34, 35, 67, 68]. Если объект 8 удален от плоскости наибольшего контраста ЛМ структуры (N,M) более чем на  , то на изображениях будет практически отсутствовать квазипериодическая пространственная модуляция с периодом (см. фиг.1(а)). При появлении на изображении по меньшей мере одной области, в пределах которой наблюдаются вертикально направленные светлые и темные полосы (см. фиг.1(б)), а также происходит квазипериодическое изменение яркости в направлении оси x с периодом, соответствующим периоду ЛМ структуры , и контрастом, превышающим заданную величину, фиксируют факт приближения плоскости выходной решетки 12 проектора 2 к этой области поверхности объекта 8 на известное расстояние. Например, если контраст проекции ЛМ структуры (N,M) на поверхность объекта 8 превышает половину ее наибольшего контраста, т.е. более
, то на изображениях будет практически отсутствовать квазипериодическая пространственная модуляция с периодом (см. фиг.1(а)). При появлении на изображении по меньшей мере одной области, в пределах которой наблюдаются вертикально направленные светлые и темные полосы (см. фиг.1(б)), а также происходит квазипериодическое изменение яркости в направлении оси x с периодом, соответствующим периоду ЛМ структуры , и контрастом, превышающим заданную величину, фиксируют факт приближения плоскости выходной решетки 12 проектора 2 к этой области поверхности объекта 8 на известное расстояние. Например, если контраст проекции ЛМ структуры (N,M) на поверхность объекта 8 превышает половину ее наибольшего контраста, т.е. более  , то расстояние от плоскости выходной решетки 12 проектора 2 до этой области поверхности объекта 8 не превышает
, то расстояние от плоскости выходной решетки 12 проектора 2 до этой области поверхности объекта 8 не превышает  . В частном случае осуществления способа при регистрации такой контрастной проекции ЛМ структуры (N,M) на объект 8, вычислительным устройством 5 или другим связанным с ним вычислительным устройством может быть дана команда на остановку или изменение направления движения подвижного аппарата 1. Этот частный случай может быть реализован, например, когда расстояние от подвижного аппарата 1 до дальней плоскости половинного контраста ЛМ структуры, равное
. В частном случае осуществления способа при регистрации такой контрастной проекции ЛМ структуры (N,M) на объект 8, вычислительным устройством 5 или другим связанным с ним вычислительным устройством может быть дана команда на остановку или изменение направления движения подвижного аппарата 1. Этот частный случай может быть реализован, например, когда расстояние от подвижного аппарата 1 до дальней плоскости половинного контраста ЛМ структуры, равное  , лишь незначительно превышает минимальное расстояние необходимое для того, чтобы избежать столкновения подвижного аппарата с объектом 8.
, лишь незначительно превышает минимальное расстояние необходимое для того, чтобы избежать столкновения подвижного аппарата с объектом 8.
В более предпочтительном частном случае осуществления способа определяют координаты области поверхности объекта 8, в пределах которой на изображении наблюдается контрастное квазипериодическое изменение яркости с пространственным периодом и направлением полос, соответствующим ЛМ структуре (N,M). При этом учитывают то, что плоскости, на которых контраст ЛМ структуры постоянен, параллельны плоскости выходной решетки 12 проекционного устройства 2. Продольная координата точек поверхности объекта 8, расположенных, например, на ближней к подвижному аппарату 1 изолинии половинного контраста ЛМ структуры (N,M), равна  , на изолинии наибольшего контраста она равна
, на изолинии наибольшего контраста она равна  , на дальней изолинии половинного контраста равна
, на дальней изолинии половинного контраста равна  . Поперечные координаты точек, расположенных, например, на изолинии наибольшего контраста ЛМ структуры, определяют, используя для этого значение их продольной координаты
. Поперечные координаты точек, расположенных, например, на изолинии наибольшего контраста ЛМ структуры, определяют, используя для этого значение их продольной координаты  , а также координаты этих точек на 2D изображении поверхности объекта 8, зарегистрированном устройством регистрации изображений 3, кроме того используют результаты калибровки устройства регистрации изображений 3 [54, 55]. В частном случае, когда координаты объектива 4 устройства регистрации изображений 3 в системе координат, связанной с проекционным устройством 2, равны ,
, а также координаты этих точек на 2D изображении поверхности объекта 8, зарегистрированном устройством регистрации изображений 3, кроме того используют результаты калибровки устройства регистрации изображений 3 [54, 55]. В частном случае, когда координаты объектива 4 устройства регистрации изображений 3 в системе координат, связанной с проекционным устройством 2, равны ,  ,
,  (см. фиг. 1 (а, б) и фиг. 6), координаты x и y точек на поверхности объекта 8, лежащих на изолинии наибольшего контраста, вычисляют по формулам
(см. фиг. 1 (а, б) и фиг. 6), координаты x и y точек на поверхности объекта 8, лежащих на изолинии наибольшего контраста, вычисляют по формулам

где  - фокальное расстояние объектива 4 устройства регистрации изображений 3,
- фокальное расстояние объектива 4 устройства регистрации изображений 3,  и
и  - координаты изображений этих точек на поверхности датчика изображений 17,
- координаты изображений этих точек на поверхности датчика изображений 17,  - расстояние от объектива 4 устройства регистрации изображений 3 до плоскости наибольшего контраста ЛМ структуры (N,M), равное
- расстояние от объектива 4 устройства регистрации изображений 3 до плоскости наибольшего контраста ЛМ структуры (N,M), равное  (см. фиг. 6). Используя найденные значения координат области поверхности объекта 8, на которую проецируется ЛМ структура (N,M), а также учитывая данные о форме подвижного аппарата 1 и положении на нем проекционного устройства 2, определяют положение этой области объекта 8 относительно подвижного аппарата 1 и его частей. Описанным выше способом можно обнаружить присутствие объектов или их частей перед подвижным аппаратом 1 в области шириной примерно
(см. фиг. 6). Используя найденные значения координат области поверхности объекта 8, на которую проецируется ЛМ структура (N,M), а также учитывая данные о форме подвижного аппарата 1 и положении на нем проекционного устройства 2, определяют положение этой области объекта 8 относительно подвижного аппарата 1 и его частей. Описанным выше способом можно обнаружить присутствие объектов или их частей перед подвижным аппаратом 1 в области шириной примерно  . С наибольшей точностью их положение может быть определено в области шириной
. С наибольшей точностью их положение может быть определено в области шириной  . Если объект 8 находится на пути подвижного аппарата 1 и расстояние до него в продольном или поперечном направлении меньше или равно заданному, то вычислительным устройством 5 или другим связанным с ним устройством может быть дана команда на остановку или изменение направления движения подвижного аппарата 1. В частном случае вычислительное устройство 5 может дать команду на включение звукового устройства, которое подаст звуковой сигнал, предупреждающий о присутствии объекта 8 в опасной близости от подвижного аппарата 1. В другом частном случае вычислительное устройство 5 может подать команду, по которой на экране монитора, отображающего изображения, получаемые устройством регистрации изображений 3, область с контрастной проекцией ЛМ структуры будет выделена на изображении, например, цветом или заключена в рамку.
. Если объект 8 находится на пути подвижного аппарата 1 и расстояние до него в продольном или поперечном направлении меньше или равно заданному, то вычислительным устройством 5 или другим связанным с ним устройством может быть дана команда на остановку или изменение направления движения подвижного аппарата 1. В частном случае вычислительное устройство 5 может дать команду на включение звукового устройства, которое подаст звуковой сигнал, предупреждающий о присутствии объекта 8 в опасной близости от подвижного аппарата 1. В другом частном случае вычислительное устройство 5 может подать команду, по которой на экране монитора, отображающего изображения, получаемые устройством регистрации изображений 3, область с контрастной проекцией ЛМ структуры будет выделена на изображении, например, цветом или заключена в рамку.
Когда объект 8 или его часть находится в области локализации световой муаровой структуры (см. фиг. 1(б) и фиг. 6), причем эта часть поверхности объекта 8 не является плоскостью, перпендикулярной оптической оси проектора 2, то при движении подвижного аппарата 1 проекция ЛМ структуры 9 будет перемещаться по поверхности объекта 8, если он достаточно широкий. В частности, при приближении подвижного аппарата 1 к протяженному объекту 8 линия постоянного контраста проекции ЛМ структуры будут перемещаться по поверхности объекта 8 от более близкой к подвижному аппарату 1 области поверхности к более удаленным. При движении подвижного аппарата 1, например, при его прямолинейном движении вперед, можно определить и при необходимости сохранить в памяти вычислительного устройства 5 координаты в глобальной системе координат точек фронтальной части поверхности объекта 8 или ее некоторой области, в частности, можно определить координаты части объекта 8, расположенной ближе других к подвижному аппарату 1. Эта информация может быть использована для обеспечения безопасной навигации подвижного аппарата 1. Например, на основании этих данных вычислительное устройство 5 имеет возможность дать команду прекратить приближение подвижного аппарата 1 к объекту 8 раньше, чем они сблизятся на опасное расстояние.
Фоновое освещение объектов, например, солнечный свет или свет фар, оказывает отрицательное влияние на надежность и точность предлагаемого способа обнаружения и определения положения объектов около подвижного аппарата. Уменьшить влияние фонового освещения на результаты измерения контраста квазипериодического изменения яркости изображения объекта можно путем вычитания из распределения яркости изображения, зарегистрированного при включенном проекторе, распределения яркости изображения при фоновом освещении, т.е. выключенном проекционном устройстве. Осуществить такой метод измерений возможно, например, если реализовать импульсный или импульсно периодический режим работы проектора. Уменьшить влияние фонового освещения также можно, если использовать осветитель, который излучает свет в спектральном диапазоне, в котором интенсивность фонового света мала (см. [69]), и установить перед объективом 4 устройства регистрации изображений 3 оптический фильтр, пропускающий свет только в этом спектральном диапазоне.
Проекционное устройство 2 кроме формирования световых ЛМ структур может быть также использовано для равномерного освещения части пространства около подвижного аппарата 1, которая находится вне области локализации муаровых структур. При таком освещении без использования дополнительных источников света можно регистрировать двумерные изображения объектов или их частей, которые предпочтительно находятся вне области локализации муаровых структур (см. фиг. 1(а)). Регистрация этих изображений может производиться устройством регистрации изображений 3 или другими устройствами регистрации изображений.
Для увеличения контролируемой области пространства в частном случае может быть реализована система, в которой проекционное устройство 2 вращается по кругу или поворачивается в заданном секторе, например, вокруг вертикальной оси. Устройство регистрации изображений 3 также может вращаться вокруг этой или параллельной ей оси, в частности, поворачиваться синхронно с проекционным устройством 2, так, чтобы ЛМ структура находилась в поле зрения устройства регистрации изображений 3. Для поворота проекционного устройства 2 и/или устройства регистрации изображений 3 может использоваться, например, сервопривод. Однако конструкция системы с вращающимся проекционным устройством является более сложной, а ее быстродействие будет ниже, чем системы с проектором, жестко закрепленным на подвижном аппарате 1.
В частном случае в системе обнаружения и определения положения объектов около подвижного аппарата 1 может быть использовано несколько проекционных устройств, которые формируют ЛМ структуры с разными характеристиками, которые, например, отличаются периодами и/или направлением полос ЛМ структур, расстоянием до плоскостей наибольшего контраста ЛМ структур и/или их ориентацией в пространстве. Система обнаружения и определения положения объектов около подвижного аппарата, в которой использовано несколько проекционных устройств, позволяет, в частности, увеличить размер контролируемой области пространства без ухудшения быстродействия системы. На фиг. 7 изображена схема подвижного аппарата 1 и установленной на нем системы с двумя проекторами 2 и 20 и двумя устройствами регистрации изображений 3 и 19, которая позволяет обнаруживать и определять положение объектов впереди и позади подвижного аппарата. Проекционные устройства 2 и 20 формируют ЛМ структуры впереди и позади подвижного аппарата 1 соответственно, а устройства регистрации изображений 3 и 19 регистрируют изображения пространства впереди и позади подвижного аппарата 1 соответственно. Обнаружение и определения положения объектов сзади подвижного аппарата 1 нужно, в частности, при его движении назад, например, при парковке или выезде задним ходом с парковочного места. В другом частном случае в системе обнаружения и определения положения объектов может быть использовано два или большее число проекционных устройств, оптические оси которых направлены под углом друг к другу, который меньше, чем 180 градусов, например, под острым углом друг к другу (см. фиг. 8). Это позволяет увеличить ширину области пространства, которая контролируется системой, например, перед подвижным аппаратом и сбоку от него. Для регистрации изображений области пространства, освещаемой проекционными устройствами 2 и 20, может быть использовано одно или большее число устройств регистрации изображений. На фиг. 7 и фиг. 8 изображены устройства регистрации изображений 3 и 19, у которых оптические оси параллельны оптическим осям проекционных устройств 2 и 20 соответственно. На фиг. 8 проекция этих оптических осей на плоскость  показаны штриховыми линиями.
показаны штриховыми линиями.
Если известны объекты и препятствия, которые преимущественно могут встречаться на пути подвижного аппарата, то для увеличения надежности и точности способа, а также уменьшения времени измерения положения таких объектов целесообразно оптимизировать характеристики ЛМ структуры, которая формируется проекционным устройством, в частности, выбрать оптимальные значения периода и глубины резкости ЛМ структуры, а также направление ее полос. Например, для обнаружения и определения положения относительно тонких приблизительно вертикальных объектов, ширина которых сравнима с периодом ЛМ структуры или меньше его, например, труб, столбов и решеток ограждения, фонарных столбов, стоек дорожных знаков, опор линий электропередачи, крыш, стеллажей, стволов деревьев и т.д., предпочтительно в системе, установленной на подвижном аппарате, использовать по меньшей мере один проектор, формирующий ЛМ структуры с горизонтальным направлением полос. На фиг. 9 схематически изображена система обнаружения и определения положения объектов, в которой использовано два проектора с горизонтальным направлением полос выходной решетки. В частном случае реализации системы (см. фиг. 9), проектор 2 установлен ближе к правому краю подвижного аппарата 1, а проектор 20 - к левому, и в ней используют одно устройство регистрации изображений 3, расположенное на линии, проходящей посередине между проекторами 2 и 20. Оптические оси проекторов 2 и 20, устройства регистрации изображений 3 параллельны направлению прямолинейного движения подвижного аппарата 1. В системе может быть использовано больше, чем одно устройство регистрации изображений. Проекторы 2 и 20 освещают область пространства перед подвижным аппаратом 1. Световые ЛМ структуры, проецируемые ими на объекты 8, имеют горизонтальное направление полос.
В другом частном случае реализации способа обнаружения и определения положения объектов около подвижного аппарата наблюдение за областью пространства, освещаемой по меньшей мере одним проекционным устройством 2, осуществляет водитель или оператор, с помощью, например, телекамеры и монитора или невооруженным глазом. При наблюдении им на поверхности какого-либо объекта 8 или на его изображении на экране монитора по меньшей мере одной области 9, в пределах которой зрительно регистрируется квазипериодическое изменение яркости поверхности с известным пространственным периодом и хорошо различимым глазом контрастом полос света и тени, водитель или оператор фиксирует факт приближения подвижного аппарата 1 к объекту 8 или его части на известное расстояние. На основании этой информации он может принять решение об остановке или изменении направления движения подвижного аппарата 1.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Perez L., Rodriguez I., Rodriguez N., Usamentiaga R., and Garcia D. F. «Robot Guidance Using Machine Vision Techniques in Industrial Environments: A Comparative Review» // Sensors, 2016, Vol. 16, No. 3, pp. 335-1 - 335-26;
2. Patent US 20080199069, 21.08.2008 «Stereo Camera for a Motor Vehicle» // Schick J., Schmack A., Steffen F.;
3. Patent US 20160311443, 27.10.2016 «Stereo camera, vehicle driving auxiliary device having same, and vehicle» // Hong Y., Park W., Park Y., Lee N.;
4. Patent US20160328619, 10.11.2016 «Vehicle driving assistance device and vehicle having the same» // Yi C., Park Y., Sanjeevu M., Vijay R., Naresh R. Y.;
5. Patent US 8064285, 22.11.2011 «Method for functionally testing an ultrasonic sensor» // Preissler P.;
6. Patent US 8942065, 27.01.2015 «Method and device for determining the position of an object in relation to a vehicle» // Schmid D., Schumann M.;
7. Patent US 9557168, 31.01.2017 «Ultrasonic measuring system having a reduced minimum range and method for detecting an obstacle» // Klotz A., Schmid D., Schumann M., Karl M.;
8. Patent US 10011278, 03.07.2018 «Collision avoidance system» // Himi T.;
9. Patent US 10852130, 01.12.2020 «Proximity sensing systems and methods» // Zhou W., Huang L.;
10. Patent US 8368873, 05.02.2013 «Proximity to target detection system and method» // Oron M., Palatnik V.;
11. Patent US 8862271, 14.10.2014 «Proximity sensing on mobile robots» // Shamilian S. V., Duffley S., Romanov N., Hook F. D., Munich M. E., Goel D.;
12. Patent US 11084172, 10.08.2021 «Obstacle following sensor scheme for a mobile robot» // Casey C. M., Cross M., Ozick D. N., Jones J. L.;
13. Патент RU 2515312, 10.05.2014 «Оптический датчик для автомобиля» // Шепеленко В. Б.;
14. Patent US 8332134, 11.12.2012 «Three-dimensional LIDAR-based clear path detection» // Zhang W., Peterson K.;
15. Patent US 9329269, 03.05.2016 «Method for registration of range images from multiple LiDARS» // Zeng S.;
16. Patent US 10447973, 15.10.2019 «Rotating LIDAR with co-aligned imager» // Droz P.-Y., Verghese S., Hermalyn B.;
17. Patent US 10578719, 03.03.2020 «Vehicle-integrated LIDAR system» // O'Keeffe J. T.;
18. Patent US 11442168, 13.09.2022 «Vehicular driving assist system with lidar sensors that emit different patterns of light» // Nicke P., May B.;
19. Patent US 4954962, 04.09.1990 «Visual navigation and obstacle avoidance structured light system» // Evans J. M., Jr., Weiman C. F. R., King S. J.;
20. Patent US 6204754, 20.03.2001 «Proximity indicating system» // Berstis V.;
21. Patent US 20050073397, 07.04.2005 «Rear and front clearance light system for a vehicle» // Zheng B., Chen Y.;
22. Patent US 20070177011, 02.08.2007 «Movement control system» // Lewin A., Woods S., Orchard D.;
23. Patent US 20090309710, 17.12.2009 «Vehicle Vicinity Monitoring System» // Kakinami T.;
24. Patent US 20140152823, 05.06.2014 «Techniques to Obtain Information About Objects Around a Vehicle» // Breed D. S.;
25. Patent US 20170106793, 20.04.2017 «Vehicle lighting system with dynamic beam pattern» // Kumar A., Michaels R. J. III, Bilger D. P., Golden E. R.;
26. Patent US 10719723, 21.07.2020 «Path sensing using structured lighting» // Schamp G. G.;
27. Patent US 10807230, 20.10.2020 «Bistatic object detection apparatus and methods» // Szatmary B., Richert M.;
28. Patent US 20220018964, 20.01.2022 «Surroundings detection device for vehicle» // Horiba K., Kinoshita M., Saito H.;
29. Patent US 20230252660, 10.08.2023 «Image-capturing apparatus for vehicle» // Takori M., Tsuchiya Y.;
30. Patent DE 102011017707, 31.10.2012 «Method for detecting object e.g. concrete post in vicinity of camera for monitoring rear side region of vehicle, involves reading images captured by cameras after partially illuminating with illumination patterns» // Niehsen W., Simon S.;
31. Patent DE 102012207716, 14.11.2013 «Optical scanning system for scanning environment of motor car, has processing unit making combined evaluation of information of images, and illumination device provided in infrared region for illuminating environment» // Focke T., Meschenmoser R., Engelberg T.;
32. Patent DE 102010039092, 22.10.2020 «Method and control device for determining a distance between an object and a vehicle» // Roelke V.;
33. Patent DE 102014100579, 23.07.2015 «System for generating information about a projection surface in front of a motor vehicle» // Kubitzka B., Wilks C.;
34. Гужов В. И. Методы измерения 3D-профиля объектов. Контактные, триангуляционные системы и методы структурированного освещения, Новосибирск, Изд-во НГТУ, 2015, 82 с.;
35. Патент RU 2807409, 14.11.2023 «Способ и система бесконтактной дальнометрии и профилометрии» // Гитлин М. С.;
36. McCurry R. E. «Multiple Source Moiré Patterns with Photographic Diffraction Gratings» // J. Appl. Phys., 1966, Vol. 37, Issue 2, pp. 479-482;
37. Keren E., Livnat A., and Glatt I. «Moire deflectometry with pure sinusoidal gratings» // Optics Letters, 1985, Vol. 10, No. 4, pp. 167-169;
38. Patorski K. «The Self-Imaging Phenomenon and Its Applications» // Progress in Optics XXVII, Edited By E. Wolf, Elsevier Science Publishers, 1989, 107 p.;
39. Crespo D., Alonso J., and Bernabéu E. «Generalized imaging using an extended monochromatic light source» // J. Opt. Soc. Am. A, 2000, Vol. 17, No. 7, pp. 1231-1240;
40. Iwata K., Sando Y., Satoh K., Moriwaki K. «Application of generalized grating imaging to pattern projection in three-dimensional profilometry» // Appl. Opt., 2011, Vol. 50, No. 26, pp. 5115-5121;
41. Hassani K., Nahal A., Tirandazi N. «Surface profilometry using the incoherent self-imaging technique in reflection mode» // J. Appl. Phys., 2018, Vol. 123, pp. 035302-1 - 035302-6;
42. Toto-Arellano N.-I., Goméz J.M. M., García-Lechuga L., Montes-Peréz A., Rodríguez Zurita G., Martínez García A., Martínez Dominguéz J.A. «Diffraction theory of binary amplitude and phase gratings with applications for Ronchi test» // Optik, 2015, Vol. 126, Issue 23, pp. 3717-3727;
43. Edmund optics, www.edmundoptics.eu
44. Applied Image Inc., www.appliedimage.com
45. Thorlabs, Inc. https://www.thorlabs.com
46. Buchwald K. «White paper: Fused Silica Transmission Gratings» // Ibsen Photonics, 2007, Publication Version: 1.0 March 2007, https://ibsen.com/wp-content/uploads/White-paper-Fused-Silica-Transmission-Gratings-v1.0-1.pdf;
47. Patent JP 2013114025A, 29.11.2011 «Grating of Talbot-Lau interferometer» // Iwata K.;
48. Iwata K., Satoh K., and Moriwaki K. «Relaxation of the Talbot condition in generalized grating imaging» // Applied Optics, 2012, Vol. 51, No. 16, pp. 3137-3144;
49. Patent US 5067816, 26.11.1991 «Optical encoder» // Ichikawa S.;
50. Patent US 5155355, 13.10.1992 «Photoelectric encoder having a grating substrate with integral light emitting elements» // Kabaya Y.;
51. Patent US 5576537, 19.11.1996 «Photoelectric position measuring system using gratings having specified dimensions to suppress harmonics» // Holzapfel W., Franz A.;
52. Patent US 2016138945, 19.05.2016 «Illumination portion for an optical encoder» // MacCoy B. K. H., Emtman C. E.;
53. Patent US 2016341576, 24.11.2016 «Light source array used in an illumination portion of an optical encoder» // MacCoy B. K. H., Emtman C. E., Kapner D. J.;
54. Гужов В. И. Методы измерения 3D-профиля объектов. Фазовые методы, Новосибирск, Изд-во НГТУ, 2016, 82 с.;
55. Грузман И. С., Киричук В. С., Косых В. П., Перетягин Г. И., Спектор А.А. Цифровая обработка изображений в информационных системах, Новосибирск: Изд-во НГТУ, 2000, 168 с.;
56. McCurry R. E. «Multiple Source Moiré Patterns» // J. Appl. Phys., 1966, Vol. 37, Issue 2, pp. 467-472;
57. Swanson G. J. and Leith E. N. «Analysis of the Lau effect and generalized grating imaging» // J. Opt. Soc. Am. A, 1985, Vol. 2, No. 6, pp. 789-793;
58. Iwata K. «Interpretation of generalized grating imaging» // J. Opt. Soc. Am. A, 2008, Vol. 25, No. 9, pp. 2244-2250;
59. Patent JP 2008232643 A, 02.10.2008 «Apparatus and method for measuring solid form» // Tomii T., Kusunoki F., Iwata K.; Moriwaki K., Fukuda H.;
60. García-Rodríguez L., Alonso J. and Bernabéu E. «Grating pseudo-imaging with polychromatic and finite extension sources» // Optics Express, 2004, Vol. 12, No. 11, pp. 2529-2541;
61. Sanchez-Brea L. M., Saez-Landete J., Alonso J., Bernabeu E. «Invariant grating pseudoimaging using polychromatic light and a finite extension source» // Applied Optics, 2008, Vol. 47, No. 10, pp. 1470-1477;
62. Ye G., Liu H., Fan S., Li X., Yu H., Lei B., Shi Y., Yin L., Lu B. «A theoretical investigation of generalized grating imaging and its application to optical encoder» // Optics Communications, 2015, Vol. 354, pp. 21-27;
63. Dubetsky B. and Berman P. R. «Creating and probing subwavelength atomic gratings using spatially separated fields» // Physical Review A, 1994, Vol. 50, No. 5, pp. 4057-4068;
64. Dubetsky B. and Berman P. R. «Atom interference using microfabricated structures» // Atom Interferometry, Edited By Paul R. Berman, Academic Press, 1997, pp. 407-468;
65. Iwata K. «Interpretation of generalized grating imaging: further analysis and numerical calculation» // J. Opt. Soc. Am. A, 2008, Vol. 25, No. 12, pp. 2939-2944;
66. Case W. B., Tomandl M., Deachapunya S., and Arndt M. «Realization of optical carpets in the Talbot and Talbot-Lau configurations» // Opt. Express, 2009, Vol. 17, Issue 23, pp. 20966-20974;
67. Лидер В. В. «Рентгеновские интерферометры Тальбота и Тальбота-Лау» // УФН, 2023, Т.193, No. 10, с.1047-1070;
68. Zhang S. High-Speed 3D Imaging with Digital Fringe Projection Techniques, CRC Press, 2019, 216 p.;
69. Patent US 20150192676, 09.07.2015 «LiDAR System Comprising A Single-Photon Detector» // Kotelnikov E. Yu., Mordarski W. P., Kudryashov I., Rangwala S. S.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и система бесконтактной дальнометрии и профилометрии | 2023 |
|
RU2807409C1 |
| СПОСОБ ОПТИЧЕСКОГО ИЗМЕРЕНИЯ ФОРМЫ ПОВЕРХНОСТИ | 2010 |
|
RU2448323C1 |
| Фотоэлектрический автоколлиматор | 1980 |
|
SU953458A1 |
| ДЕТЕКТОР И СИСТЕМА ВИЗУАЛИЗАЦИИ ДЛЯ РЕНТГЕНОВСКОЙ ФАЗОВО-КОНТРАСТНОЙ ВИЗУАЛИЗАЦИИ ТОМОСИНТЕЗА | 2015 |
|
RU2708816C2 |
| Координатное устройство для проекционной печати | 1982 |
|
SU1063210A1 |
| Способ определения подлинности и качества изготовления защитных голограмм, выполненных на основе дифракционных микроструктур, и устройство для его реализации | 2019 |
|
RU2722335C1 |
| ФУНДУС-КАМЕРА | 2001 |
|
RU2215463C2 |
| Способ и устройство проецирования изображения с лазерным усилением яркости | 2017 |
|
RU2692084C1 |
| ГРАФО-ПРОЕКЦИОННЫЙ МУАРОВЫЙ СПОСОБ ИЗМЕРЕНИЯ | 2014 |
|
RU2583852C2 |
| ПОЛУЧЕНИЕ ФАЗЫ ДЛЯ СИСТЕМ СКАНИРОВАНИЯ С ДИФФЕРЕНЦИАЛЬНЫМ ФАЗОВЫМ КОНТРАСТОМ | 2014 |
|
RU2677763C1 |
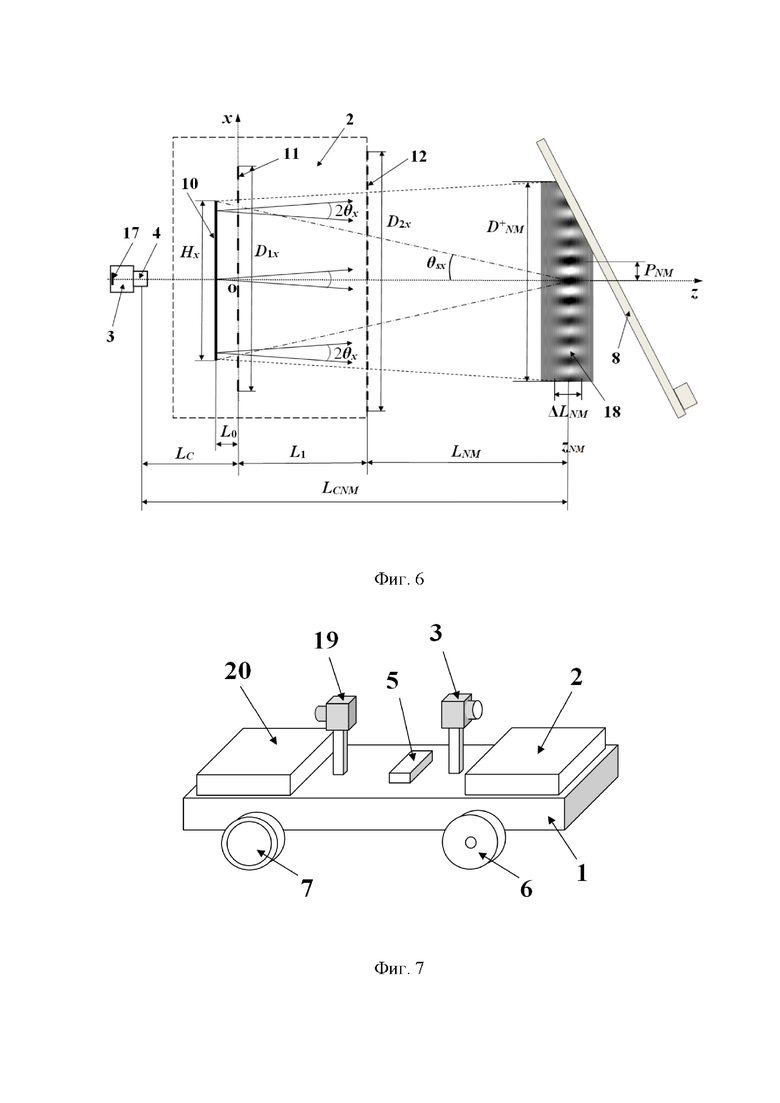
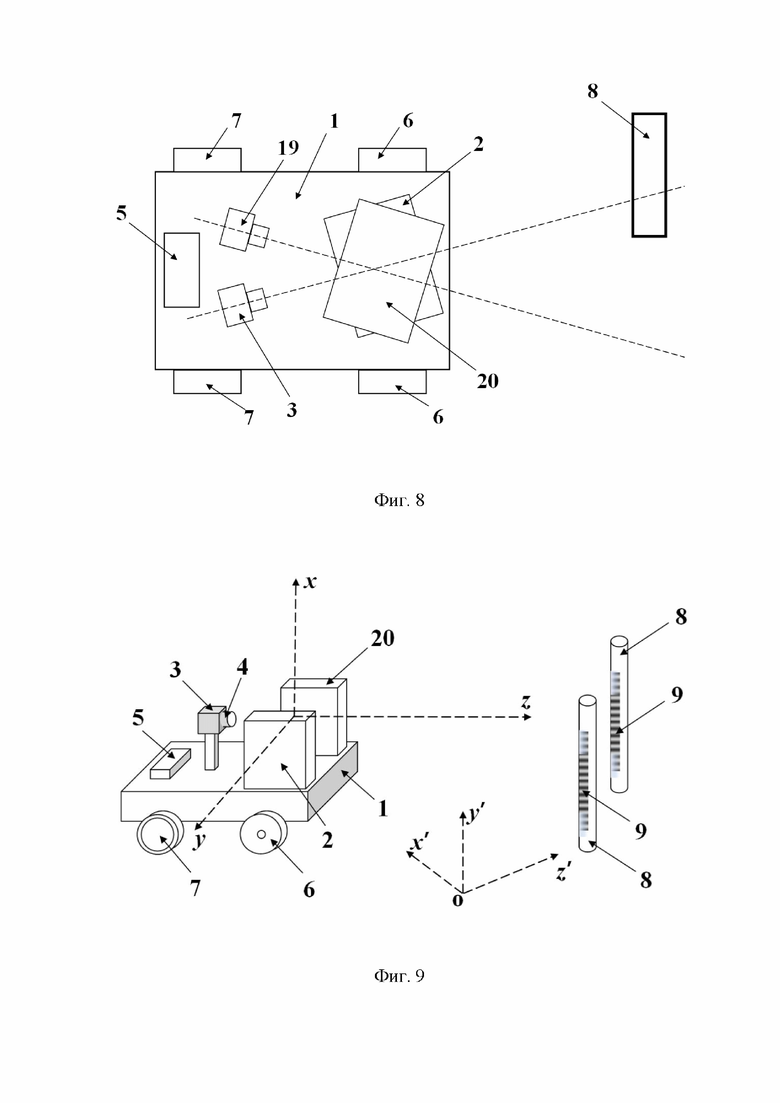
Использование: изобретение относится к области измерительной техники, к активным оптическим системам обнаружения и определения положения объектов. Сущность: система, установленная на подвижном аппарате и реализующая способ обнаружения и определения положения объектов около него, включает по крайней мере одно оптическое широкопольное проекционное устройство, содержащее по меньшей мере одну периодическую пропускающую решетку, которая освещается осветителем, причем параметры проекционного устройства таковы, что оно формирует световую локализованную муаровую структуру. Способ обнаружения и определения положения объектов включает освещение области пространства около подвижного аппарата структурированным светом, формируемым с помощью такого проекционного устройства, регистрацию при разном положении подвижного аппарата изображений области пространства, освещаемой проекционным устройством. При появлении на изображении области с квазипериодическим с известным пространственным периодом изменением яркости фиксируют факт приближения подвижного аппарата к объекту или к его части на известное расстояние. Технический результат: увеличение надежности обнаружения и определения положения объектов около подвижного аппарата, повышение безопасности его движения. 2 н. и 23 з.п. ф-лы, 9 ил. 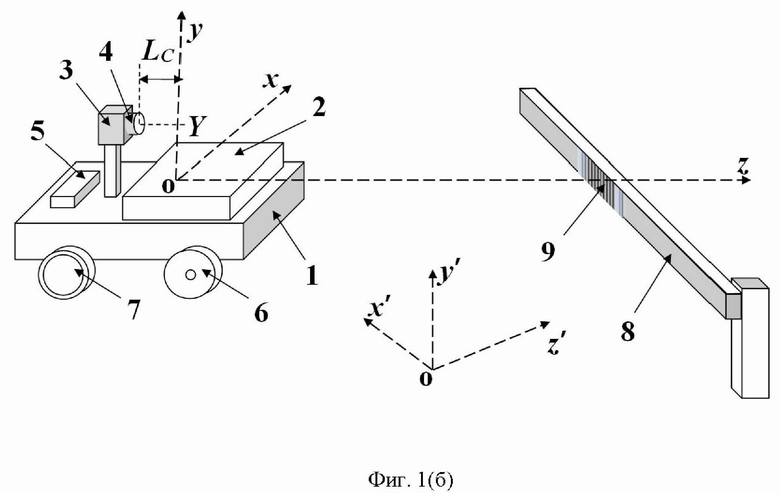
1. Система обнаружения и определения положения объектов около подвижного аппарата, включающая в себя по меньшей мере одно проекционное устройство, излучающее структурированный свет, которое установлено на подвижном аппарате, отличающаяся тем, что применено широкопольное проекционное устройство, содержащее осветитель и по меньшей мере одну плоскую периодическую пропускающую решетку, которая освещается осветителем, причем размеры решетки, а также размеры рабочей апертуры осветителя и ширина диаграммы направленности излучаемого им света таковы, что позволяют проекционному устройству сформировать по меньшей мере одну световую локализованную муаровую структуру с глубиной резкости, которая достаточна для обнаружения и определения положения предполагаемых объектов.
2. Система по п. 1, отличающаяся тем, что в ней применено по меньшей мере одно широкопольное проекционное устройство, у которого размеры решетки, а также размеры рабочей апертуры осветителя и ширина диаграммы направленности излучаемого им света позволяют проекционному устройству сформировать по меньшей мере одну световую локализованную муаровую структуру с глубиной резкости меньше 10%.
3. Система по п. 1, отличающаяся тем, что в ней дополнительно применено по меньшей мере одно устройство регистрации изображений, которое установлено на подвижном аппарате и которое осуществляет регистрацию изображений по крайней мере части области пространства, освещаемой проекционным устройством, формирующим по меньшей мере одну световую локализованную муаровую структуру.
4. Система по п. 3, отличающаяся тем, что в ней дополнительно применено по меньшей мере одно вычислительное устройство, которое может обмениваться данными и осуществлять управление устройством регистрации изображений и другими устройствами системы, а также устройствами управления или помощи в управлении подвижным аппаратом.
5. Система по п. 1, включающая в себя по меньшей мере одно проекционное устройство, содержащее две плоские одномерные периодические пропускающие решетки, которые расположены в параллельных плоскостях с одной стороны от осветителя и имеют одинаковое направление полос и которые освещаются этим осветителем, причем на вторую решетку, которая является выходной, падает свет, прошедший через первую решетку, отличающаяся тем, что размеры решеток, а также размеры рабочей апертуры осветителя и ширина диаграммы направленности излучаемого им света позволяют проекционному устройству сформировать по меньшей мере одну световую локализованную муаровую структуру с глубиной резкости, которая достаточна для обнаружения и определения положения предполагаемых объектов.
6. Система по п. 5, отличающаяся тем, что в проекционном устройстве использован осветитель с однородной плоской светящейся поверхностью, которая параллельна плоскостям решеток, причем ширина рабочей апертуры осветителя и ширина диаграммы направленности излучаемого им света такие, что позволяют сформировать по меньшей мере одну световую локализованную муаровую структуру с глубиной резкости, которая достаточна для обнаружения и определения положения предполагаемых объектов.
7. Система по п. 5, отличающаяся тем, что в оптическом проекционном устройстве в качестве осветителя использован источник диффузного света.
8. Система по п. 5, отличающаяся тем, что в ней применено проекционное устройство, в котором установлено устройство, контролируемо изменяющее расстояние между плоскостями первой и второй решеток.
9. Система по п. 1, отличающаяся тем, что в ней применено проекционное устройство, в котором характеристики по меньшей мере одной решетки можно изменять.
10. Система по п. 1, отличающаяся тем, что в ней применено проекционное устройство, в котором для формирования по меньшей мере одной решетки использован пространственный модулятор света.
11. Система по п. 1, отличающаяся тем, что в ней применено проекционное устройство, в котором установлена одна плоская одномерная периодическая пропускающая решетка, которая является выходной, и использован осветитель, который представляет собой одномерную периодическую решетку источников света, свет от которых падает на выходную решетку, причем светящиеся поверхности индивидуальных источников света расположены в плоскости, параллельной плоскости выходной решетки, а их светящиеся полосы направлены параллельно полосам выходной решетки.
12. Система по п. 1, отличающаяся тем, что в ней применено проекционное устройство, в котором установлена одна плоская одномерная периодическая пропускающая решетка, которая является выходной, и использован осветитель, который представляет собой периодическую линейку источников света, свет от которых падает на выходную решетку, причем центры светящихся поверхностей индивидуальных источников света такого осветителя расположены на линии, параллельной плоскости выходной решетки и перпендикулярной направлению ее полос.
13. Система по п. 1, отличающаяся тем, что в ней применено проекционное устройство, в котором установлена одна плоская одномерная периодическая пропускающая решетка, которая является выходной, и использован осветитель, который представляет собой прямоугольную периодическую матрицу источников света, свет от которых падает на выходную решетку, причем светящиеся поверхности индивидуальных источников света такого осветителя расположены в плоскости, параллельной плоскости выходной решетки, а столбцы либо строки матрицы источников света параллельны направлению полос выходной решетки.
14. Система по любому из пп. 11-13, отличающаяся тем, что в ней применено проекционное устройство, в котором установлено устройство, контролируемо изменяющее расстояние между плоскостью выходной решетки и осветителем.
15. Система по любому из пп. 5, 11-13, отличающаяся тем, что в ней применено проекционное устройство, в котором дополнительно установлено устройство, контролируемо перемещающее по меньшей мере одну решетку вдоль поперечной координаты, перпендикулярной направлению ее полос.
16. Система по любому из пп. 11-13, отличающаяся тем, что в ней применено проекционное устройство, в котором дополнительно установлено устройство, контролируемо перемещающее осветитель вдоль поперечной координаты, перпендикулярной направлению полос выходной решетки.
17. Система по п. 1, отличающаяся тем, что в ней применено проекционное устройство, которое может работать в импульсном или импульсно-периодическом режиме.
18. Система по п. 1, отличающаяся тем, что в ней применено проекционное устройство, которое может поворачиваться относительно подвижного аппарата.
19. Система по п. 1, отличающаяся тем, что в ней применено два или более проекционных устройств, направление оптических осей которых не совпадают друг с другом.
20. Способ обнаружения и определения положения объектов около подвижного аппарата, включающий освещение области пространства около подвижного аппарата структурированным светом, излучаемым по меньшей мере одним проекционным устройством, которое установлено на подвижном аппарате, отличающийся тем, что для освещения области пространства используют структурированный свет, который представляет собой по меньшей мере одну локализованную муаровую структуру, фиксируют факт приближения подвижного аппарата к объекту или к его части на известное расстояние посредством регистрации по меньшей мере одной области на поверхности объекта, в пределах которой наблюдается квазипериодическое с известным пространственным периодом изменение яркости, при этом расстояние определяют по контрасту проекции локализованной муаровой структуры с известной глубиной резкости.
21. Способ по п. 20, отличающийся тем, что для его реализации используют по меньшей мере одну локализованную муаровую структуру, у которой наибольше значение контраста более 0,2.
22. Способ по п. 20, отличающийся тем, что регистрацию изображений области пространства, освещаемой проекционным устройством, производят с помощью по меньшей мере одного устройства регистрации изображений, рассчитывают вычислительным устройством зависимости яркости этих изображений от 2D координат на изображениях, вычисляют зависимости величины контраста квазипериодического с известным пространственным периодом изменения яркости от 2D координат на изображениях, фиксируют факт приближения объекта или его части к плоскости выходной решетки, которая установлена в проекционном устройстве, на известное расстояние, если на изображении имеется по меньшей мере одна область, в пределах которой контраст квазипериодического с упомянутым пространственным периодом изменения яркости изображения превышает заданную величину.
23. Способ по п. 22, отличающийся тем, что определяют координаты области объекта, в пределах которой контраст квазипериодического с известным пространственным периодом изменения яркости изображения превышает заданную величину, в системе координат, связанной с проекционным устройством, учитывая при этом, что плоскость, где постоянна величина контраста локализованной муаровой структуры, параллельна плоскости выходной решетки проектора и удалена от нее на известное расстояние, а также, учитывая результаты калибровки устройства регистрации изображений, определяют положение упомянутой области поверхности объекта относительно подвижного аппарата и его частей, используя для этого информацию о форме подвижного аппарата и расположении на нем проекционного устройства.
24. Способ по п. 20, отличающийся тем, что наблюдение за областью пространства, которая освещается проекционным устройством, и обнаружение объектов осуществляет водитель путем зрительной регистрации им на поверхности какого-либо объекта по меньшей мере одной области, в пределах которой наблюдается квазипериодическое с известным пространственным периодом изменение ее яркости.
25. Способ по п. 20, отличающийся тем, что обнаружение объектов осуществляет оператор, управляющий подвижным аппаратом, путем регистрации на экране монитора, отображающего информацию с устройства регистрации изображений, изображения по меньшей мере одной области на поверхности какого-либо объекта, в пределах которой наблюдается квазипериодическое с известным пространственным периодом изменение ее яркости.
| US 20220018964 A1, 20.01.2022 | |||
| JP 2008232643 A, 02.10.2008 | |||
| US 20230252660 A1, 10.08.2023 | |||
| US 20140152823 A1, 05.06.2014 | |||
| СПОСОБ ОПТИЧЕСКОГО ИЗМЕРЕНИЯ ФОРМЫ ПОВЕРХНОСТИ ТРЕХМЕРНОГО ОБЪЕКТА (ВАРИАНТЫ) | 2003 |
|
RU2232373C1 |
| JP 2000009445 A, 14.01.2000. | |||

