Изобретение относится к измерительной технике и может быть использовано при транспортировке самоходной гусеничной техники автомобильным или железнодорожным транспортом в процессе проведения погрузо-разгрузочных работ с помощью системы компьютерного зрения.
Известен способ производства погрузочных работ при размещении гусеничных тракторов и инженерных машин на базе этих тракторов в крупнотоннажном контейнере, заключающийся в том, что их разъединяют на части и помещают в контейнер [1]. Недостатком этого способа являются высокие затраты времени на разборку и последующую сборку гусеничной техники.
Известны способы транспортирования гусеничной дорожно-строительной техники, принадлежащей к семейству тракторов типа Т-170 [2]. Транспортирование гусеничной техники может осуществляться автомобильным, железнодорожным, морским и другими видами транспорта в соответствии с правилами перевозки грузов, действующих для этих видов транспорта. Установка трактора на платформу транспортного средства производится грузоподъемным краном, имеющим специальное приспособление для строповки. При погрузке (разгрузке) трактора на транспортные средства своим ходом, въезд (съезд) производят по специальным наклонным въездам (аппарелям). Рекомендуемый угол наклона составляет от 15 до 18 градусов. Погрузка (выгрузка) гусеничной техники осуществляется по командам человека, который контролирует процесс погрузки.
Недостатками этого способа являются высокие затраты времени, технических и материальных средств на погрузку гусеничной техники с помощью крана, поскольку необходима предварительная установка крана в местах проведения погрузо-разгрузочных работ. При этом также присутствуют риски обрыва тросов, с помощью которых осуществляется погрузка техники и опрокидывание крана под тяжестью грузимой гусеничной техники. В случае погрузки гусеничной техники своим ходом параметры погрузки определяются визуальным методом, основанном на субъективной оценке человеком, контролирующим процесс погрузки, что увеличивает риск опрокидывания гусеничной техники в процессе ее въезда на грузовую платформу.
Также известен способ погрузки самоходной техники на железнодорожную платформу [3], который предусматривает вывешивание со стороны погрузки концевой части платформы с помощью домкратов, расцепление рамы платформы с ходовой тележкой и ее откатывание, опускание с помощью домкратов концевой части платформы до соприкосновения с рельсами железнодорожного пути и центрирование относительно последнего, установку в рабочее положение со стороны торца платформы устройства для въезда, установку самоходной техники путем самостоятельного передвижения на платформу.
Известный способ погрузки крупногабаритной самоходной техники, так же, как и вышерассмотренный способ погрузки, не обеспечивают контроль параметров погрузки техники. Недостатком данного способа является высокий риск опрокидывания самоходной гусеничной техники вследствие крена транспортного средства или схода гусеницы техники с грузовой платформы в процессе въезда, поскольку ширина грузовой платформы ненамного больше, а иногда и меньше ширины гусеничного шасси этой техники.
Наиболее близким по совокупности существенных признаков с заявляемым способом, является способ определения зон и степеней негабаритности грузов на открытом подвижном составе с помощью телевизионных изображений [4], включающий контроль соблюдения границ габаритности погрузки при входе состава в зону контроля с помощью оптоэлектронных датчиков. Данный способ осуществляется посредством проведения железнодорожного состава через зону контроля, образованную оптическими границами датчиков габаритных ворот, сравнении габаритов погрузки подвижного состава с требуемыми габаритами погрузки, определении вертикальной или горизонтальной координаты негабаритного груза в зависимости от плоскости контроля негабаритного груза, видеонаблюдении проходящего состава, передаче по каналам связи информации от оптоэлектронных датчиков о нарушении габаритов, визуализации ее на экране компьютерного монитора и подаче тревожного сигнала для привлечения внимания оператора на нарушение, с указанием зоны нарушения.
Недостаток указанного способа заключается в определении габаритов и координат грузов уже после их погрузки, что не позволяет определить параметры погрузки самоходной гусеничной техники, оказывающие влияние на безопасность в процессе ее погрузки своим ходом.
Задача изобретения - повысить безопасность проведения погрузо-разгрузочных работ с самоходной гусеничной техникой и снизить риски ее повреждения в процессе транспортировки.
Поставленная задача решается благодаря тому, что в способе применяется система компьютерного зрения, размещаемая на транспортируемой гусеничной технике, а также визирные цели, устанавливаемые на грузовой платформе транспортного средства, с помощью которых определяются параметры погрузки гусеничной техники. При этом отслеживание и наведение на визирные цели, производится системой компьютерного зрения автоматически в режиме реального времени. По измеренным с помощью системы компьютерного зрения зенитным и азимутальным углам визирных целей определяются параметры погрузки гусеничной техники своим ходом из следующей системы уравнений:
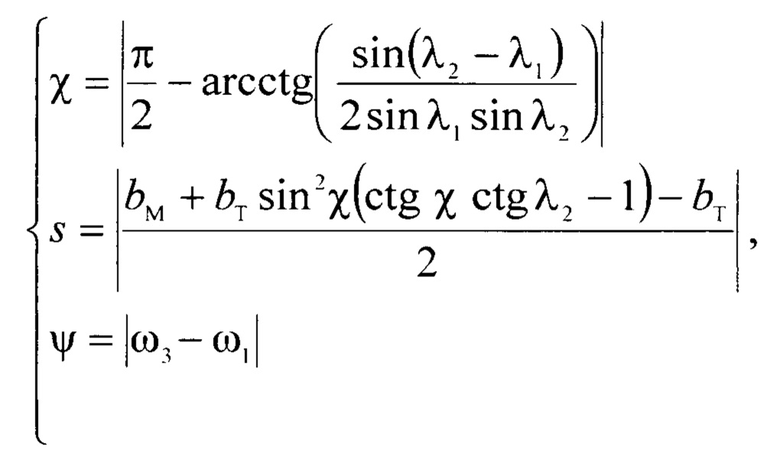
где χ - угол между продольными осями грузовой платформы и гусеничной техники;
s - свес гусениц техники с края грузовой платформы;
ψ - крен грузовой платформы;
bT - ширина грузовой платформы транспортного средства;
bM - ширина шасси транспортируемой гусеничной техники;
γ1 и γ2 - модули разностей азимутальных углов визирных целей;
ω1 и ω3 - зенитные углы визирных целей.
Свойство, появляющееся у заявляемого способа - это возможность контролировать значения параметров погрузки (разгрузки) гусеничной техники своим ходом при въезде на транспортное средство или съезде с него.
Сущность изобретения поясняется чертежами, на которых:
фиг. 1 - принципиальная схема погрузки самоходной гусеничной техники на транспортное средство;
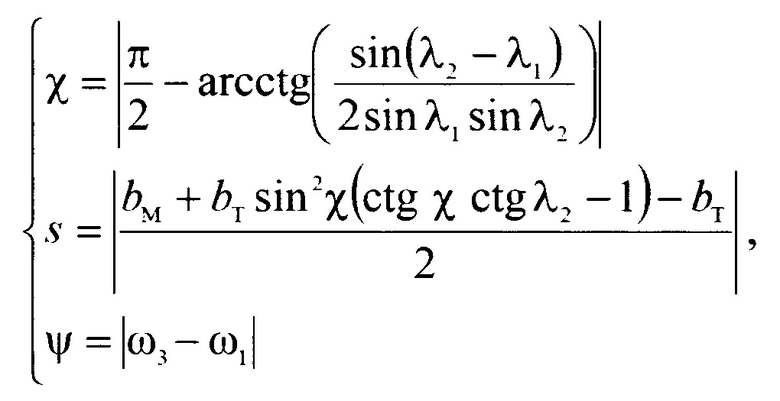
фиг. 2 - схема прохождения оптических лучей от визирных целей к системе компьютерного зрения.
Заявленный способ определения параметров погрузки гусеничной техники своим ходом на транспортное средство с помощью системы компьютерного зрения осуществляется следующим образом.
Система компьютерного зрения (СКЗ) включает в свой состав визирные цели 1, видеокамеру 2, устройство для наведения видеокамеры (на фигуре не обозначено) и бортовой компьютер (на фигуре не обозначен), предназначенный для обработки видеоизображения и определения параметров погрузки самоходной гусеничной техники. Для ориентирования СКЗ используются три визирные цели 1 активного типа, установленные по дальнему краю грузовой платформы транспортного средства на одинаковом расстоянии друг от друга. Видеокамера 2 устанавливается на кабине самоходной гусеничной техники вдоль оси вращения гусеничного шасси. СКЗ обнаруживает визирные цели 1 и наводит видеокамеру 2 на визирную цель, расположенную в центре. При этом визирные цели 1 проецируются на плоскость изображения видеокамеры 2. Устройство для наведения видеокамеры фиксирует направление главной оптической оси видеокамеры 2 относительно самоходной гусеничной техники, после чего бортовой компьютер вычисляет зенитные и азимутальные углы визирных целей 1, по которым определяются параметры погрузки самоходной гусеничной техники.
СКЗ определяет параметры погрузки самоходной гусеничной техники в процессе въезда на грузовую платформу транспортного средства и предупреждает выход значений этих параметров за пределы допуска. Допустимый свес гусеницы с края грузовой платформы определяется из выражения:
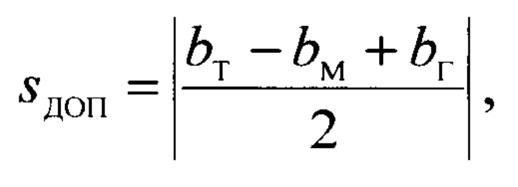
где bT - ширина грузовой платформы транспортного средства;
bM - ширина гусеничного шасси самоходной гусеничной техники;
bГ - ширина гусеницы самоходной гусеничной техники. Горизонтальный угол между продольными осями грузовой платформы транспортного средства и самоходной гусеничной техники в процессе ее въезда (съезда) не должен превышать следующее значение:
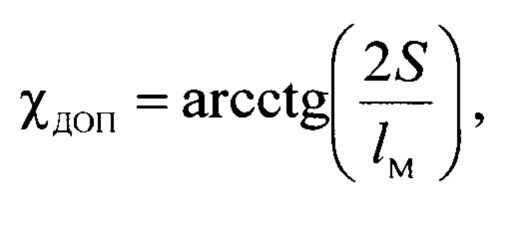
где lM - длина гусеничного шасси самоходной гусеничной техники.
СКЗ также контролирует превышение допустимого значения крена транспортного средства - угловое отклонение от горизонтального положения. В случае превышения допустимых значений контролируемых параметров процесс погрузки самоходной гусеничной техники прерывается, за счет чего снижаются риски повреждения этой техники.
Вначале СКЗ, находящаяся в точке М, измеряет зенитные (ω1, ω2, ω3) и азимутальные (λ1, l2, λ3) углы трех визирных целей (V1, V2, V3). Затем вычисляются модули разности между азимутальными углами центральной визирной цели и двумя крайними визирными целями в соответствии с выражениями:
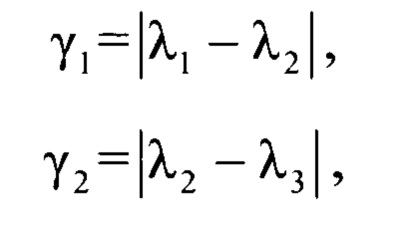
где λ1, λ2, λ3 - азимутальные углы визирных целей.
После этого вычисляется горизонтальный угол, образованный прямой, соединяющей одну из крайних визирных целей с центральной, и проектирующим лучом, идущим к видеокамере от центральной визирной цели, из выражения:
После преобразования получают следующее выражение:
Угол между продольными осями грузовой платформы транспортного средства и самоходной гусеничной техники определяют из выражения:
Затем вычисляется расстояние от оси вращения гусеничного шасси самоходной гусеничной техники до продольной оси транспортного средства:
После чего определяется свес гусеницы самоходной гусеничной техники с края грузовой платформы транспортного средства из выражения:
Крен грузовой платформы транспортного средства определяется из выражения:
где ω1, ω3 - зенитные углы двух крайних визирных целей.
Эти данные отображаются на экране бортового компьютера самоходной гусеничной техники. По ним машинист корректирует направление движения гусеничной техники своим ходом в процессе погрузки на транспортное средство. Если самоходная гусеничная техники оснащена автоматизированной системой управления, то по этим данным погрузка гусеничной техники своим ходом на транспортное средство может выполняться в автоматическом режиме.
Источники информации
1. Патент на изобретение Российской Федерации №2193983 С2 «Способ производства погрузочных работ при размещении гусеничных тракторов и инженерных машин на базе этих тракторов в крупнотоннажном контейнере», приоритет от 09.01.2001, МПК В60Р3/06, 7/08, B65G67/04. Авторы: А.А. Качурин Г.П. Мицын Г.Ф. Паринов В.М. Платонов Нго За БАО, Тью Хонг ХЫНГ, опубликовано 10.12.2002; заявитель Открытое акционерное общество "Челябинский тракторный завод".
2. Трактор Т-170М1.01, его модификации и комплектации. Техническое описание и инструкция по эксплуатации. Открытое акционерное общество «Челябинский тракторный завод», - Челябинск: ГСХБ, 1999. - 231 с.
3. Патент на изобретение Российской Федерации №2229993 С2 «Способ погрузки самоходной техники на железнодорожную платформу и железнодорожное транспортное средство для осуществления способа», приоритет от 13.12.2001, МПК B61D3/18, B65G67/04. Авторы: А.П. Кондратьев, Б.М. Лебедев, Н.М. Павлов, А.Д. Попов, Ю.В. Сальников, А.Ф. Уткин, опубликовано: 10.06.2004, бюл. №16; заявитель Открытое акционерное общество "Конструкторское бюро специального машиностроения".
4. Патент на изобретение Российской Федерации №2355595 С2 «Способ определения зон и степеней негабаритности грузов на открытом подвижном составе с помощью телевизионных изображений», приоритет от 24.04.2008, МПК B61K9/02. Авторы: В.М. Лысый, В.Б. Дегтярь, Б.А. Аюпов, А.В. Хазанский, А.Я. Кугель, О.А. Куренков, опубликовано 20.05.2009, бюл. №14; заявитель Открытое акционерное общество Научно-производственное предприятие "Альфа-Прибор".
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОГРУЗКИ САМОХОДНОЙ ТЕХНИКИ НА ЖЕЛЕЗНОДОРОЖНУЮ ПЛАТФОРМУ И ЖЕЛЕЗНОДОРОЖНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2001 |
|
RU2229993C2 |
| Пандус для выгрузки и погрузки тяжелой самоходной техники с борта железнодорожной платформы подвижного состава | 2024 |
|
RU2840915C1 |
| Наземный роботизированный комплекс | 2023 |
|
RU2819223C1 |
| Способ определения собственных координат по трем визирным целям и видеограмметрическая система для его осуществления | 2021 |
|
RU2769637C1 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2018 |
|
RU2701592C1 |
| Переносная сборно-разборная аппарель | 2022 |
|
RU2795426C1 |
| МАЛОГАБАРИТНЫЙ ВСЕСЕЗОННЫЙ УНИВЕРСАЛЬНЫЙ ГУСЕНИЧНЫЙ ВЕЗДЕХОД | 2013 |
|
RU2534202C2 |
| НАЗЕМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2017 |
|
RU2678553C1 |
| Гусеничный транспортер | 2023 |
|
RU2798887C1 |
| ЖЕЛЕЗНОДОРОЖНАЯ ПЛАТФОРМА С ГРУЗОВОЙ ПОВОРОТНОЙ КОНСТРУКЦИЕЙ ДЛЯ КОМБИНИРОВАННОЙ ЖЕЛЕЗНОДОРОЖНО-АВТОМОБИЛЬНОЙ ПЕРЕВОЗКИ ЛИБО ОДНОГО ПОЛУПРИЦЕПА, ЛИБО ДВУХ АВТОТРАНСПОРТНЫХ СРЕДСТВ | 2001 |
|
RU2282547C2 |
Изобретение относится к измерительной технике и может быть использовано при транспортировке самоходной гусеничной техники автомобильным или железнодорожным транспортом в процессе проведения погрузо-разгрузочных работ с помощью системы компьютерного зрения. Параметры погрузки гусеничной техники своим ходом на транспортное средство определяются с помощью системы компьютерного зрения, которая включает в свой состав визирные цели активного типа, размещаемые по дальнему краю грузовой платформы транспортного средства на одинаковом расстоянии друг от друга, а также видеокамеру с устройством наведения на визирные цели, устанавливаемую на кабине самоходной гусеничной техники вдоль оси вращения гусеничного шасси. При этом система компьютерного зрения обнаруживает визирные цели с помощью видеокамеры, вычисляет зенитные и азимутальные углы визирных целей, после чего определяет параметры погрузки самоходной гусеничной техники из системы уравнений:
где χ - угол между продольными осями грузовой платформы и гусеничной техники;
s - свес гусениц техники с края грузовой платформы;
ψ - крен грузовой платформы;
bT - ширина грузовой платформы транспортного средства;
bM - ширина шасси транспортируемой гусеничной техники;
γ1 и γ2 - модули разностей азимутальных углов визирных целей;
ω1 и ω3 - зенитные углы визирных целей. Технический результат - повышение безопасности проведения погрузо-разгрузочных работ с самоходной гусеничной техникой и снижение рисков ее повреждения в процессе транспортировки. 2 ил.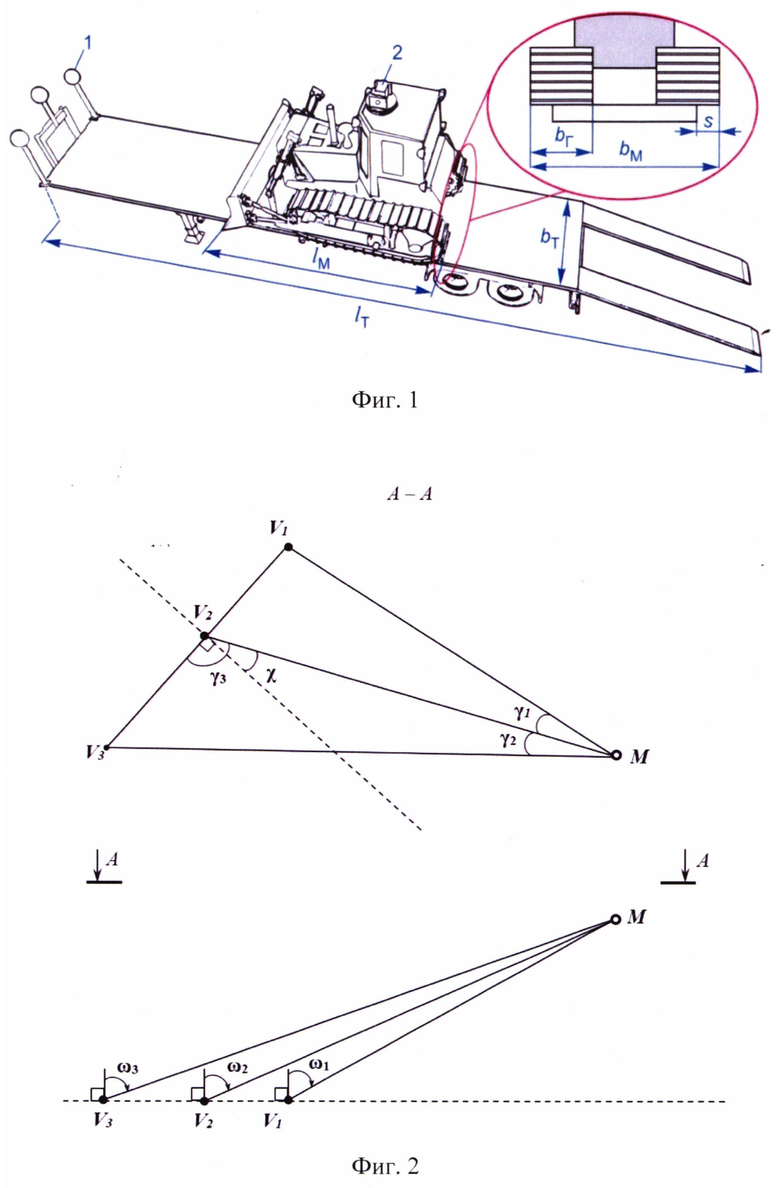
Способ определения параметров погрузки гусеничной техники своим ходом на транспортное средство, заключающийся в применении системы компьютерного зрения, которая включает в свой состав визирные цели активного типа, размещаемые по дальнему краю грузовой платформы транспортного средства на одинаковом расстоянии друг от друга, а также видеокамеру с устройством наведения на визирные цели, устанавливаемую на кабине самоходной гусеничной техники вдоль оси вращения гусеничного шасси, при этом система компьютерного зрения обнаруживает визирные цели с помощью видеокамеры, вычисляет зенитные и азимутальные углы визирных целей, после чего определяет параметры погрузки самоходной гусеничной техники из системы уравнений:
где χ - угол между продольными осями грузовой платформы и гусеничной техники;
s - свес гусениц техники с края грузовой платформы;
ψ - крен грузовой платформы;
bT - ширина грузовой платформы транспортного средства;
bM - ширина шасси транспортируемой гусеничной техники;
γ1 и γ2 - модули разностей азимутальных углов визирных целей;
ω1 и ω3 - зенитные углы визирных целей.
| СПОСОБ ОРИЕНТАЦИИ ПО ЛАЗЕРНОМУ ЛУЧУ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2602290C2 |
| СИСТЕМА, УСТРОЙСТВО И СПОСОБ ТЕКУЩЕГО КОНТРОЛЯ ПОЛОЖЕНИЯ И ОРИЕНТАЦИИ ТРАНСПОРТНОГО СРЕДСТВА, ПОГРУЗОЧНОГО УСТРОЙСТВА И ГРУЗА ПРИ РАБОТЕ ПОГРУЗОЧНОГО УСТРОЙСТВА | 2012 |
|
RU2623295C2 |
| US 20190308856 A1, 10.10.2019 | |||
| EP 3427117 A1, 16.01.2019 | |||
| US 20130096875 A1, 18.04.2013. | |||

