Изобретение относится к подъемно-транспортному машиностроению и касается конструктивного исполнения транспортера на гусеничном ходу, используемого для перевозки и перемещения грузов в стесненных для маневрирования условиях, например, для перемещения груза по лестничным маршам в жилых зданиях или по наклонным поверхностям с углом наклона не более 35°.
Под стесненными условиями понимаются ограниченные по площади и по доступу к ним пространства, не позволяющие применять подъемную технику общего назначения. В частности, под этими условиями понимаются внутреннее пространство помещения, лестничная зона в зданиях, перекрытые сверху рабочие зоны и т.д. Под грузом понимаются негабаритные изделия весом до 500 кг (насосы, электродвигатели, генераторы и т.д.).
Известен гусеничный транспортер, содержащий корпус, установленный на ходовой части, оснащенной по каждому борту корпуса гусеничным движителем с гусеницами, расположенные внутри корпуса правый и левый электроприводы постоянного тока, выполненные с возможностью передачи через редукторы крутящего момента на ведущие звездочки каждого гусеничного движителя, блок аккумуляторных батарей для питания указанных электроприводов, расположенную сверху на корпусе и через шарниры с ним связанную грузовую платформу, кинематически связанную с механизмом ее поворота относительно общей оси вращения указанных шарниров, при этом механизм поворота грузовой платформы выполнен в виде двух разнесенных по бортам кузова силовых гидравлических цилиндров, грузовая платформа выполнена в передней части с упором для ограничения перемещения груза при движении на наклонной поверхности, а шарниры смонтированы в задней части корпуса выше зубчатых звездочек (см. Лестничный электрический транспортер «PIANOPLAN» компании Н&Н Vertriebs GmbH, выложенный в режиме предложения к продаже на сайте компании по адресу www.mi-vertrieb-shop.com/p/pianoplan, обнаружено в 2021 г., копия страниц сайта прилагается).
Устройство имеет пульт управления для включения/выключения питания узлов кинематической структуры и механизма поворота грузовой платформы для ее удержания в горизонтальном положении при перемещениях по наклонным поверхностям.
Несмотря на то, что разработчиками данный гусеничный транспортер позиционируется как средство перемещения тяжелых грузов по лестничным маршам, известный транспортер не может использоваться для маршевых лестниц жилых домов в силу того, что он является длинномерным изделием с длиной примерно равной половине длины лестницы. Выбор такой длины обусловлен потребностью перевозки таких упакованных грузов как холодильник или шкаф, а для этого необходимо, чтобы площадь грузовой платформы равнялась площади поверхности опирания упаковки этого груза. Но перемещение по маршевой лестнице заканчивается выездом транспортера на лестничную площадку и необходимостью его разворота. А при такой длине этот транспортер не может развернуться на этой площадке.
Кроме того, в транспортере наклон грузовой платформы не производится. Платформа остается всегда горизонтальной на ровной поверхности, и наклонной на наклонной поверхности. При движении по наклонной поверхности и по лестничным маршам грузовая платформа наклонена, а груз на платформе упирается в выступ и поэтому не падает с этой платформы. Отклоняется от грузовой платформы только шасси с корпусом за счет выдвижения штоков силовых гидроцилиндров. При этом из корпуса выходит дополнительная колесная опора, которая удерживает корпус с гусеничным шасси под наклоном к горизонтали. Таким образом груз поднимается до некоторого уровня над поверхностью (с целью удобства разгрузки).
Транспортер имеет большой вес и сложную кинематику взаимодействия основных агрегатов. Во-первых, он имеет гусеничный движитель с приводом зубчатых звездочек от электродвигателей постоянного тока, для чего в корпусе размещен блок аккумуляторных батарей. Во-вторых, для изменения положения корпуса вместе с шасси относительно грузовой платформы, используются силовые гидроцилиндры, располагаемые внутри корпуса и сообщенные с гидронасосом, имеющим отдельный электропривод с питанием от указанного блока аккумуляторных батарей и сообщенным с масляным баком. Данные компоненты не только увеличивают вес транспортера, но и влияют на его габариты, что не позволяет использовать этот транспортер в стесненных по площади маневрирования поверхностях.
Кроме того, в известном транспортере применены гусеницы с резинотехническими компонентами в траках, работающими как зацепы, в частности, для зацепления за препятствие, что позволяет транспортеру переезжать неровности и въезжать на марши. Но такие резинотехнические элементы, работающие в условиях повышенных нагрузки и деформации быстро теряют первоначальные свойства из-за разрушения связей внутренней структуры материала и в результате повышенного износа.
Более конструктивно функциональным является решение гусеничного транспортера, содержащего корпус, расположенный на ходовой части, оснащенной по каждому борту корпуса гусеничным движителем с гусеницами, расположенные внутри корпуса электроприводы постоянного тока, выполненные с возможностью передачи через редукторы крутящего момента на ведущие звездочки каждого гусеничного движителя, блок аккумуляторных батарей для питания указанных электроприводов, расположенную сверху на корпусе и через шарниры с ним связанную грузовую платформу в виде открытого сверху короба, используемого для укладки груза и кинематически, связанную с механизмом ее поворота относительно общей оси вращения указанных шарниров, выполненным в виде силового гидроцилиндра, при этом ось шарниров расположена выше уровня зубчатых колес с задней стороны корпуса (CN 114684285, B62D 55/075, F03D 80/50, опубл. 01.07.2022 г.).
Недостаток данного решения заключается в конструктивной сложности исполнения механизма поворота грузовой платформы за счет применения гидравлических элементов.
Так же известен гусеничного транспортера, содержащего корпус, расположенный на ходовой части, оснащенной по каждому борту корпуса гусеничным движителем с гусеницами, расположенные внутри корпуса электроприводы постоянного тока, выполненные с возможностью передачи через редукторы крутящего момента на ведущие звездочки каждого гусеничного движителя, блок аккумуляторных батарей для питания указанных электроприводов, расположенную сверху на корпусе и через шарниры с ним связанную грузовую платформу в виде открытого сверху короба, используемого для укладки груза и кинематически, связанную с механизмом ее поворота относительно общей оси вращения указанных шарниров, выполненным в виде силового гидроцилиндра, ось шарниров расположена выше уровня зубчатых колес с задней стороны корпуса, а гидросистема питания силового гидроцилиндра схемно связана с датчиками гиростабилизатора для контроля положения грузовой платформы в ее горизонтальном положении при движении по наклонной поверхности (CN 113371086, B62D 55/075, опубл. 10.09.2021 г.). Это решение принято в качестве прототипа.
Недостаток данного решения заключается в применении гидросистемы поворота грузовой платформы, использование которой существенно увеличивает вес транспортера и его габариты.
Кроме того, недостатком данного решения является высокое расположение центра тяжести всего транспортера. Платформа высоко поднята над корпусом и, следовательно, ее центр тяжести расположен выше гусеничного шасси. Такой транспортер становится неустойчивым и зависящим от наклона опорной поверхности в поперечном направлении. Поэтому транспортер оснащен выносной гусеничной опорой с приводом от зубчатых колес, которая выходит из корпуса при движении транспортера по наклонной опорной поверхности. Так как транспортер неустойчив при поперечных наклонах, то на грузовой платформе предусмотрены фиксаторы груза, исключающие его перемещение по поверхности этой платформы.
Высокое расположение центра тяжести обусловлено следующим. В гусеничных движителях использована схема расположения ведущих зубчатых колес и натяжных зубчатых колес выше уровня расположения опорных катков вдоль нижней ветки гусеницы. Такая схема применяется, когда используется балансирная подвеска опорных катков с целью повышения мягкости хода и возможности преодоления небольших препятствий. Такое расположение этих колес благоприятно влияет на заезд гусениц на ступеньки (марши) лестницы (зубчатые колеса располагаются выше высоты ступеньки). Но в этом случае существенно вырастает масса гусеничного шасси и поднимается центр тяжести до уровня рамы, к которой в каждом движителе прикреплены опорные и поддерживающие катки и их балансиры.
А в известном решении грузовая платформа располагается не на верхних точках остова гусеничного шасси, а выше этого остова и удерживается на опорных стойках на отдельной базовой платформе, связанной с остовом гусеничного движителя. Необходимость этих стоек и базовой платформы вызвана тем, чтобы исключить контакт верхней ветви гусеницы с грузовой платформой. Базовая платформа выполняет функцию разделителя или отделителя шасси ль грузовой платформы. Поэтому в системе «грузовая платформа - гусеничное шасси» центр тяжести ненагруженного транспортера расположен выше гусеничного шасси. При повороте грузовой платформы относительно гусеничного шасси (при движении по наклонной поверхности) центр тяжести перемещается в сторону груза, и транспортер становится неустойчивым к поперечным колебаниям и наклонам (из-за наличия балансирной подвески в гусеничных движителях), так как гусеничные движители приобретают независимые перемещения в вертикальном направлении в допусках колебаний балансиров.
Настоящее изобретение направлено на достижение технического результата, заключающегося в повышении устойчивости при перемещении поверхностям с находящимся на грузовой платформе грузом за счет понижения центра тяжести.
Указанный технический результат достигается тем, что в гусеничном транспортере, содержащем гусеничное шасси с корпусом, имеющее по каждому борту корпуса гусеничный движитель с гусеницами, расположенные внутри корпуса электроприводы постоянного тока, выполненные с возможностью передачи крутящего момента через редукторы на ведущие звездочки каждого гусеничного движителя, блок аккумуляторных батарей для питания указанных электроприводов, а так же расположенную сверху на корпусе шарнирно смонтированную грузовую платформу, кинематически связанную с механизмом ее поворота относительно общей оси вращения шарниров этой платформы, грузовая платформа выполнена в плане в формате 4:3 в виде плоской стальной пластины, усиленной прямоугольным профилем на меньших по длине сторонах и имеющей боковые стенки, расположенные снаружи гусеничных движителей и связанные с рамой каждого гусеничного движителя посредством шарнира, ось которого расположена смещенно в сторону ведущих звездочек гусеничных движителей, расположенных в задней части корпуса, и ниже оси вращения каждой зубчатой звездочки, при этом гусеничный движитель для выполненных с металлическими траками, покрытыми полиуретаном, гусениц оснащен на раме опорными, поддерживающими и натяжными катками, а механизм поворота грузовой платформы выполнен в виде силового линейного актуатора, электродвигатель которого связан с датчиками контроля отклонения платформы узла гиростабилизации для реализации поворота грузовой платформы до ее горизонтального положения в функции от угла наклона корпуса.
Указанные признаки являются существенными и взаимосвязаны с образованием устойчивой совокупности существенных признаков, достаточной для получения требуемого технического результата.
Настоящее изобретение поясняется конкретным примером исполнения, который, однако, не является единственно возможным, но наглядно демонстрирует возможность достижения требуемого технического результата.
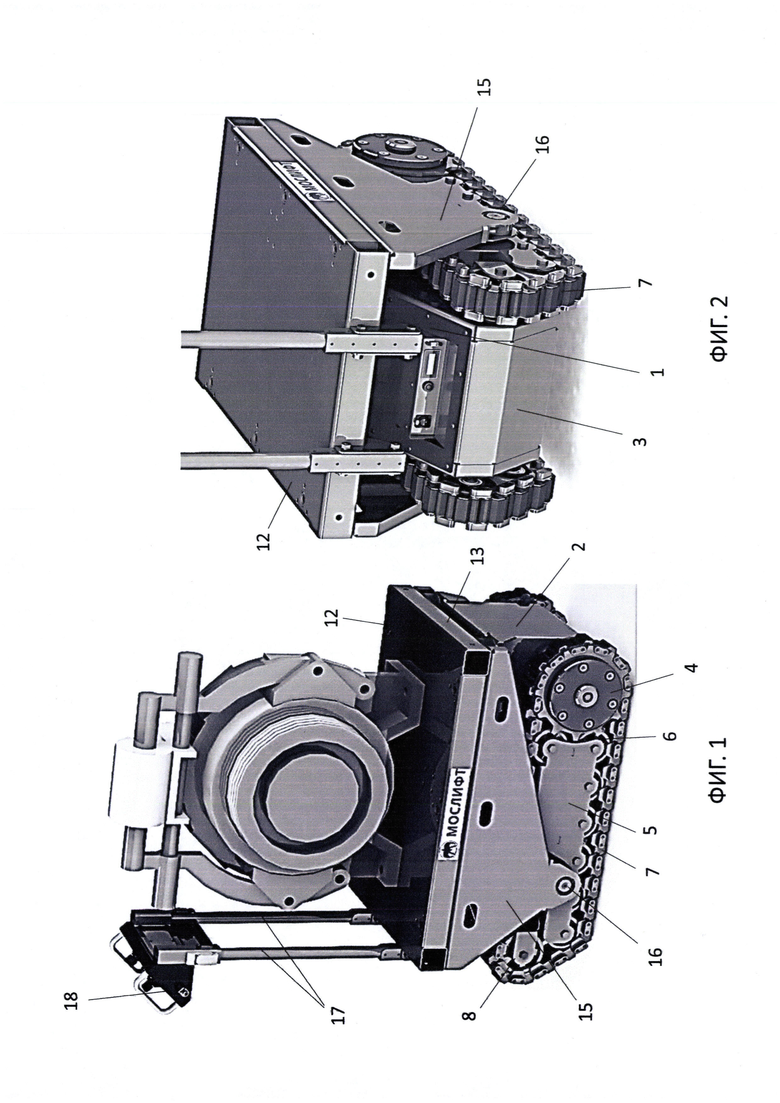
На фиг. 1 - общий вид гусеничного транспортера (с грузом) с одной стороны;
фиг. 2 - общий вид гусеничного транспортера (без груза) с другой стороны;
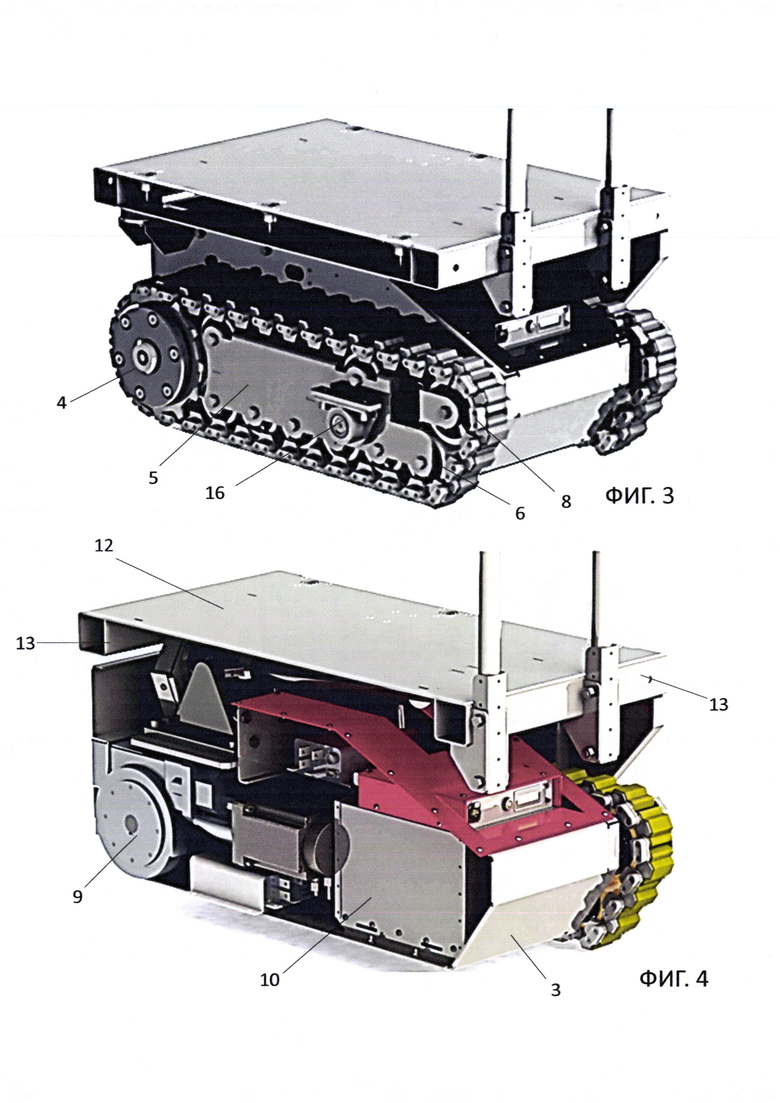
фиг. 3 - общий вид гусеничного транспортера без боковой панели, вид на гусеничный движитель;
фиг. 4 - то же, что на фиг. 3, вид без гусеничного движителя;
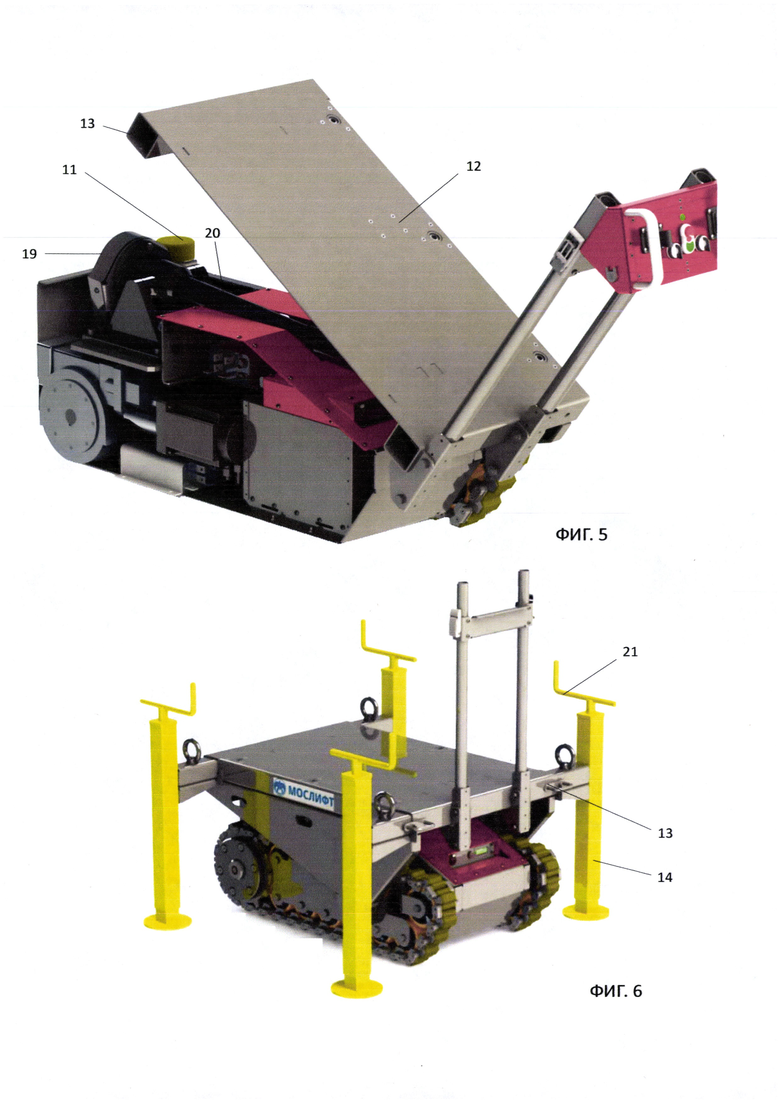
фиг. 5 - общий вид транспортера с приподнятой грузовой платформой;
фиг. 6 - транспортер, оснащенный съемными аутригерами;
фиг. 7 - показано перемещение транспортера по лестничным маршам.
Согласно настоящему изобретению, рассматривается конструкция гусеничного транспортера, используемого для логистических операций по перемещению грузов весом до 500 кг. Транспортер может преодолевать бордюры, пороги и препятствия высотой до 180 мм и двигаться по лестничным маршам с высотой ступеней до 180 мм и уклоном до 35° при габаритах в плане 900×600 мм. Выбор ширины транспортера 600 мм обусловлен тем, что устройство используется для перемещения груза с его подъемом по лестничным маршам минимальной шириной для внутриквартирных жилых домов 800 мм, для двухэтажных домов - 900 мм. Длина 900 мм выбрана из условия, что прилегающая к маршам лестничная площадка имеет ширину не менее 1200 мм и соответствовать ширине лестницы. Длина ее между лестничными пролетами не менее чем 1300-1400 мм. Таким образом, для маневрирования на лестничной площадке (выезд с лестницы на площадку и разворот) размеры транспортера в плане 900×600 мм, соответствующие формату 4:3, позволяют беспрепятственно изменять направление движения в стесненных условиях лестничных конструкций жилых зданий.
Конструктивно гусеничный транспортер состоит из гусеничного шасси и расположенной на корпусе этого шасси грузовой платформы (фиг. 1 и 2).
Гусеничное шасси выполнено в виде полого остова - корпуса 1 с боковыми стенками и передней 2 и задней 3 торцевыми стенками. В частности, корпус выполнен сварным из стальных листов, что позволяет уменьшить вес корпуса по отношению к отлитым остовам. Вдоль боковых стенок расположены гусеничные движители, состоящие каждый из ведущего зубчатого колеса 4, смонтированного на приводной оси в передней части корпуса. Ось ведущего зубчатого колеса проходит внутрь корпуса и через бортовой редуктор связана с электрическим двигателем постоянного тока, закрепленным на днище корпуса. С корпусом связана рама 5 гусеничного движителя, к которой снизу прикреплены с возможностью свободного вращения опорные катки 6, которые выставлены вдоль нижней ветви гусеницы 7 в ряд. При такой компоновке опорных катков нижняя ветвь гусеницы приобретает прямолинейность и не имеет прогибов между опорными катками при переезде через препятствия. А сверху к раме 5 с возможностью свободного вращения прикреплены поддерживающие катки. В задней части корпуса размещено натяжное зубчатое колесо (ведомое зубчатое колесо 8) диметром меньшим диаметра ведущего зубчатого колеса. Ось вращения натяжного зубчатого колеса расположена выше оси ведущего зубчатого колеса. Гусеница 7 охватывает все колеса так, что расстояние между верхней и нижней ветвями гусеницы равно практически диаметру ведущего зубчатого колеса. Элементы гусеничного движителя не подрессорены, что дает возможность исключить поперечные смещения и наклоны корпуса при движении по лестницам.
Для привода гусеничных движителей применяются электрические двигатели 9 постоянного тока, сообщенные по электрическим линиям через блок управления с блоком аккумуляторных батарей 10 (фиг. 4). Блок управления позволяет синхронизировать крутящие момента на ведущих зубчатых колесах для обеспечения прямолинейного движения и обеспечить разницу в оборотах этих колес при маневрировании вплоть до остановки движителя одного борта.
Существенным для гусеничного движителя транспортера, перемещающегося по лестничным маршам, является его возможность въезда на первый марш при движении верх. Для заезда необходимо, чтобы один из траков гусеницы зацепом оперся на грань ступени, а для этого необходимо, чтобы верхнерасположенный трак на ведущем зубчатом колесе (трак верхней ветви гусеницы, заходящий на зуб ведущего колеса) был выше уровня расположения грани ступени (высота проступи марша в лестнице жилого дома равна от 100 мм до 260 мм). Только в этом случае при подъезде к маршу гусеница зацепляется за угол марша и поднимает корпус, положение которого по углу наклона стабилизируется при въезде на второй (следующий) марш за счет того, что система рядно выставленных опорных катков не дает прогибов в гусенице при заезде на угол марша. В связи с этим, диаметр ведущего зубчатого колеса выбран с учетом высоты между ступеньками лестницы без учета толщины траков.
Но въезд на марш сопровождается увеличением нагрузки на выступы траков гусеницы. Для уменьшения трения и исключения разрушения структуры материала сдвигающими усилиями предлагается гусеницы выполнить полиуретанометаллическими. Конструктивно гусеница состоит из металлических траков с выступающими элементами (зацепами), соединенных металлическими осями. Особенностью является то, что выступающий выступ на каждом траке выполнен центрально расположенным в виде параллелепипедной формы выступа. А трак в этой центральной зоне с наружной стороны (со стороны выступа) покрыт слоем полиуретана. Этот вид пластика является эластомером, способным вернуть форму после снятия деформационных нагрузок, удерживает свою структуру в присутствии: масел, кислоты, щелочей и жиров, не подвергается гидролизу, устойчив к воздействию микроорганизмов (грибков, бактерий, архей), не окисляется озоном, как резина. Это повышает срок службы изделий. Обладает высокой износостойкостью, что существенно повышает срок службы гусениц, работающих на трение при подъеме по маршам. При этом полимер гасит вибрационные нагрузки и уменьшает шум от контакта гусениц с опорной поверхностью.
На верхней кромке корпуса гусеничного шасси размещены резинотехнические опоры 11 (фиг. 5), работающие как амортизационные элементы для гашения колебаний от перевозимого груза. На эти опоры укладывается грузовая платформа 12 (при движении по горизонтальным опорным поверхностям) в виде стального плоского листа, на концах которого снизу приварены полые стальные профили 13 квадратного или прямоугольного сечения. Эти профили используются в качестве элементов жесткости платформы, а открытые проемы профилей используются для установки в них аутригеров 14 (фиг. 6). Одна сторона (меньшей длины) платформы размещена свободно на указанных опорах 11, а противоположная ей сторона шарнир но связана с корпусом 1 шасси так, что свободный край платформы может подниматься с поворотом вокруг оси вращения, как это показано на фиг. 5. Платформа не имеет элементов фиксации груза, так как платформа всегда находится в горизонтальном положении при условии, что узел гиростабилизации включен или транспортер движется по горизонтальной опорной поверхности.
Грузовая платформа 12 выполнена с боковыми стенками 15. На представленных изображениях эти боковые стенки 15 выполнены треугольной формы, что позволяет уменьшить вес самсой платформы. Боковые стенки 15 расположены снаружи гусеничных движителей и связаны посредством шарниров поворотно с рамой 5 (фиг. 3) гусеничного движителя через ось 16 вращения, расположенную смещенно в сторону ведущих зубчатых колес 4 гусеничных движителей в задней части корпуса 1 и ниже оси вращения каждого ведущего зубчатого колеса 4. Таким образом, точка опирания грузовой платформы расположена ниже центра тяжести гусеничного шасси. При повороте платформы (как это показано на фиг. 5) опора реактивного момента образуется в зоне нижних ветвей гусеничного движителя, что повышает повысить устойчивость самого шасси.
К передней стенки грузовой платформы могут быть присоединены стойки 17, на которых съемно монтируется пульт 18 управления гусеничным транспортером. Этот пульт может быть спят со стоек, так как связь пульта с процессорным блоком управления выполнена дистанционной беспроводной. Система управления и конструкция пульта в рамках данной заявки не рассматривается, так как является типовым решением по реализации упрощенного алгоритма управления электродвигателями и узлом поворота грузовой платформы в функции от показаний узла гиростабилизации. Управление движением может осуществляться промышленными джойстиками и/или функциональными кнопками. Состояние режимов работы отображается светодиодной индикацией. Пульт управления съемный, имеет автономное питание и радиоканал связи с транспортером.
Так как стойки прикреплены к грузовой платформе, то при перемещении груза по наклонной поверхности стойки всегда будут ориентированы вертикально вверх. И при наличии на них пульта управления этот пульт будет гарантировано в удобном для оператора положении.
Узел гиростабилизации представляет собой гиростабилизированную платформу с гироскопом. При появлении внешнего момента, например из-за изменения углового положения платформы, платформа вместе с наружной рамой гироскопа смещается от заданного положения и, так как гироскоп сохраняет свою ориентацию неизменной, на выходе датчика угла появляется сигнал отклонения платформы. Этот сигнал после усиления подается на двигатель стабилизации. Динамические параметры работы таковы, что даже при максимальных возмущениях платформа возвращается к прежней ориентации не более, чем за десятые доли секунды. В заявленном решении моменты отклонения от горизонтали в качестве сигналов датчиков поступают на процессорный контроллер, который выдает управляющий сигнал электрическому двигателю силового линейного актуатора 19 (фиг. 5), выполняющего функцию механизма поворота грузовой платформы относительно общей оси вращения шарниров, которыми эта платформа прикреплена к корпусу (основу) гусеничного шасси.
Актуатор состоит из двигателя, редуктора и механического винтового привода с выходным штоком 20. При подаче питания → вращается вал двигателя → вращается редуктор → вращается ходовой винт →поступает линейное перемещение штока. При смене полярности - шток начнет перемещается в противоположную сторону. При снятии питания процессе останавливается. Высокий КПД актуатора обеспечивается применением шариковинтовой передачи. В зависимости от режимов работы, сервоприводы комплектуются или трапецеидальным винтом или шариковинтовой передачей, просто блоком подшипников или блоком подшипников с коническим редуктором. Особенностью конструкции является соосное расположение выдвигаемого штока 20 и электродвигателя, или в случае применения конического редуктора - перпендикулярное расположение оси актуатора и оси электродвигателя. Различные типы концевых выключателей (ограничители хода штока) - бесконтактные индуктивные датчики, электрические микропереключатели - позволяют останавливать перемещение штока электрического привода в заданных позициях. При оснащении механизма линейного перемещения модульным электродвигателем, в состав которого входит ENCODER фирмы SICK STEGMANN, можно получить полный контроль над перемещением (следящий линейный электропривод).
Силовой актуатор внутри корпуса расположен вдоль продольной оси и компоновочно уложен симметрично относительно боковых сторон грузовой платформы (фиг. 5) так, что силовой шток или винт связан с тыльной поверхностью грузовой платформы в точке, расположенной на оси симметрии этой платформы и удаленной от оси вращения шарниров крепления платформы на кузове гусеничного шасси.
Режим контроля и управления положением грузовой платформы в горизонтальном положении включается оператором на пульте управления. При подаче питания в процессорный контроллер и на элементы гиростабилизированной платформы отклонения платоримы от положения гироскопа формируются управляющие сигналы, через контроллер поступающие в электродвигатель (или в блок управления им) силового линейного актуатора. Подвижный элемент актуатора выдвигается и поворачивает платформу вокруг оси шарниров в соответствии с алгоритмом отклонения гиростабилизированной платформы от горизонтали. Таким образом обеспечивается горизонтальное положение грузовой платформы при перемещении транспортера по наклонной поверхности.
Транспортер комплектуется съемными аутригерами 14 с винтовыми домкратами 21. Аутригеры вставляются и фиксируются в гнездах открытых профилей 13 на верхней части грузовой платформы (в отверстия стальных профилей, приваренных к листу платформы) и предназначены для разгрузки ходовой системы транспортера и его строповки при перевозке грузовым транспортом. Используя аутригеры, допускается устанавливать и крепить на транспортере груз в цеховых условиях и перевозить его к месту проведения ремонтных работ в сборе с транспортером.
Настоящее изобретение промышленно применимо. Изобретение позволяет при формате грузовой платформы 4:3 в плане обеспечить высокую устойчивость при кренах и перемещении по наклонным поверхностям (в том числе и по маршам лестниц в жилых зданиях) за счет переноса точки опоры грузовой платформы на раму - держатель опорных катков гусеничного шасси ниже уровня формирования крутящего момента на движителях.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОЛЁСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДА | 2013 |
|
RU2542220C1 |
| Модуль колёсно-гусеничного движителя и шасси с двумя модулями | 2022 |
|
RU2784225C1 |
| СТАБИЛИЗАТОР КУРСА ДВИЖЕНИЯ ШАССИ ТРАНСПОРТНОГО СРЕДСТВА ПО СТУПЕНЯМ | 2013 |
|
RU2538653C1 |
| ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ И ТРАНСПОРТНОЕ СРЕДСТВО С ИСПОЛЬЗОВАНИЕМ ЭТОГО ДВИЖИТЕЛЯ | 1996 |
|
RU2094283C1 |
| Орбитально-траковый движитель | 2022 |
|
RU2778578C1 |
| Колёсно-гусеничное шасси транспортного средства повышенной проходимости | 2022 |
|
RU2787607C1 |
| Терминал оплаты проезда в наземном общественном транспорте | 2021 |
|
RU2772066C1 |
| МНОГОЦЕЛЕВОЕ ГУСЕНИЧНОЕ ШАССИ | 2008 |
|
RU2403528C2 |
| ИНВАЛИДНАЯ КОЛЯСКА | 1994 |
|
RU2076673C1 |
| МОНОГУСЕНИЦА | 2022 |
|
RU2779126C1 |

Изобретение относится к области машиностроения, в частности к гусеничным транспортерам. Транспортер содержит гусеничное шасси с корпусом, электроприводы постоянного тока, блок аккумуляторных батарей, грузовую платформу. Грузовая платформа выполнена в виде плоской стальной пластины, усиленной прямоугольным профилем на меньших по длине сторонах, и имеет боковые стенки. Боковые стенки расположены снаружи гусеничных движителей и связаны с рамой каждого гусеничного движителя посредством шарнира. Ось шарнира расположена смещенно в сторону ведущих звездочек гусеничных движителей. Механизм поворота грузовой платформы выполнен в виде силового линейного актуатора. Электродвигатель актуатора связан с датчиками контроля отклонения платформы узла гиростабилизации для реализации поворота грузовой платформы до ее горизонтального положения в функции от угла наклона корпуса. Достигается повышение устойчивости транспортера с грузом. 7 ил.
Гусеничный транспортер, содержащий гусеничное шасси с корпусом, имеющее по каждому борту корпуса гусеничный движитель с гусеницами, расположенные внутри корпуса электроприводы постоянного тока, выполненные с возможностью передачи крутящего момента через редукторы на ведущие звездочки каждого гусеничного движителя, блок аккумуляторных батарей для питания указанных электроприводов, а также расположенную сверху на корпусе шарнирно смонтированную грузовую платформу, кинематически связанную с механизмом ее поворота относительно общей оси вращения шарниров этой платформы, отличающийся тем, что грузовая платформа выполнена в плане в формате 4:3 в виде плоской стальной пластины, усиленной прямоугольным профилем на меньших по длине сторонах и имеющей боковые стенки, расположенные снаружи гусеничных движителей и связанные с рамой каждого гусеничного движителя посредством шарнира, ось которого расположена смещенно в сторону ведущих звездочек гусеничных движителей, расположенных в задней части корпуса, и ниже оси вращения каждой зубчатой звездочки, при этом гусеничный движитель для выполненных с металлическими траками, покрытыми полиуретаном, гусениц оснащен на раме опорными, поддерживающими и натяжными катками, а механизм поворота грузовой платформы выполнен в виде силового линейного актуатора, электродвигатель которого связан с датчиками контроля отклонения платформы узла гиростабилизации для реализации поворота грузовой платформы до ее горизонтального положения в функции от угла наклона корпуса.
| CN 114684285 A, 01.07.2022 | |||
| CN 113371086 A, 10.09.2021 | |||
| ПРЕДОХРАНИТЕЛЬНОЕ УСТРОЙСТВО ПРИСПОСОБЛЕНИЙ ДЛЯ ПОДЪЕМА ПО ЛЕСТНИЦАМ | 1998 |
|
RU2185987C2 |
