Изобретение относится к специальной технике, предназначенной преимущественно для решения задач материально-технического обеспечения (МТО) подразделений первого эшелона (переднего края) сухопутных войск в условиях ведения боевых действий, в том числе для подвоза боеприпасов, вооружения, горючего, продовольствия и иных материальных средств, для эвакуации раненых и т.п.. Изобретение может также относится к технике, предназначенной для решения одновременно как задач МТО, так и боевых задач, задач разведки, инженерных задач и т.п.
Известен мобильный робототехнический комплекс, содержащий пост дистанционного управления и мобильный робот, оснащенный бортовой телевизионной системой, а также выносной системой видеонаблюдения с устройствами ее доставки и оперативного развертывания в заданной точке местности (RU 2364500 С2, B25J 5/00, 20.08.2009).
Этот комплекс имеет ограниченные возможности, поскольку выполнен с возможностью доставки только выносной системы видеонаблюдения и не приспособлен для решения других задач материально-технического обеспечения (МТО) подразделений. К его недостаткам относится также пониженная надежность выполнения поставленной задачи, что обусловлено отсутствием резервирования мобильного робота и применением радиоканала связи с ним. Выход мобильного робота из строя вследствие отказов его узлов и агрегатов, огневого воздействия противника, воздействия естественных и искусственных радиопомех, опрокидывания или потери радиосигнала из-за наличии препятствий между мобильным роботом и пунктом дистанционного управления, приводит к невозможности доставки и развертывания полезной нагрузки (выносной системы видеонаблюдения). Еще одним недостатком этого комплекса является ограниченная продолжительность его работы, обусловленная отсутствием средств пополнения запаса энергии бортового источника питания мобильного робота.
Наиболее близким к предложенному является многофункциональный робототехнический комплекс обеспечения боевых действий, содержащий самодвижущееся транспортное средство с системой технического зрения, системой связи и передачи данных, пункт дистанционного управления и группу универсальных роботизированных платформ, выполненных с возможностью их комплектации различными функциональными модулями в зависимости от решаемой задачи, в том числе транспортным модулем. Каждая универсальная роботизированная платформа оснащена системой навигации и топопривязки и обеспечивает возможность перемещения в дистанционном ручном режиме, в полуавтоматическом режиме с движением по траектории, задаваемой оператором, по траектории, сохраненной ранее при движении в ручном режиме, а также с возможностью автоматического возвращения в исходную точку по пройденному маршруту. Транспортный модуль комплектуется манипулятором, сцепным устройством, лебедкой с трапом, откидными бортами и набором ремней с крепежными петлями, что позволяет транспортировать возимую полезную нагрузку (боеприпасы, снаряжение, медикаменты и продовольствие) к месту назначения в условиях ведения боевых действий. Управление роботизированными платформами осуществляется по радиоканалу с пункта дистанционного управления (RU 2533229 С2, B25J 5/00, 20.11.2014).
К недостаткам этого комплекса относится его пониженная надежность, невысокая мобильность и ограниченные функциональные возможности выполнения задач материально-технического обеспечения воинских подразделений. Обусловлено это тем, что в данном комплексе не предусмотрена возможность самостоятельного выполнения роботизированной платформой поставленных задач МТО без радиосвязи с пунктом дистанционного управления (предусмотрено только движение по ранее пройденному маршруту). К этим же недостаткам приводит отсутствие взаимодействия между роботизированными платформами при решении задач МТО и невозможность выполнения одной задачи с помощью двух или более синхронно работающих роботизированных платформ, например, невозможность доставки грузов с массой, превышающей грузоподъемность одной роботизированной платформы. Применение для их работы исключительно автономных источников питания, причем без подзарядки во время работы, приводит к ограниченной энерговооруженности роботизированных платформ и, как следствие к ограничению скорости движения и максимального радиуса действия роботизированной платформы (ограничению мобильности). Применение радиосвязи межу роботизированными платформами и пунктом дистанционного управления приводит к снижению надежности работы робототехнического комплекса как при работе на пересеченной местности, так и при наличии естественных и искусственных радиопомех. Отсутствие в этом робототехническом комплексе мер по обеспечению скрытности работы роботизированных платформ также приводит к снижения надежности выполнения задач МТО в условиях ведения боевых действий вследствие повышения вероятности их поражения огнем противника.
К снижению эффективности работы известного робототехнического комплекса и надежности решения поставленных перед ним задач приводит также отсутствие бронирования пункта дистанционного управления и транспортного средства (средства парковки роботизированных платформ). По этой причине зона выполнения задач МТО ограничена условиями распространения радиоволн (рельефом местности и наличием препятствий на пути их распространения), а также необходимостью расположения оператора вне зоны огневой активности противника.
Манипуляторы и сцепные (тягово-сцепные) устройства в известном робототехническом комплексе не имеют дистанционного или автоматического управления и размещены только на роботизированных платформах. Их отсутствие на транспортном средстве (средстве парковки), а также возможность их использования только в ручном режиме, приводит к снижению функциональных возможностей робототехнического комплекса, а именно, препятствует выполнению задач МТО в зоне огневой активности противника.
Задачей настоящего изобретения является создание наземного робототехнического комплекса, обладающего повышенной эффективностью его применения и надежностью выполнения задач материально-технического обеспечения воинских подразделений первого эшелона (переднего края) сухопутных войск в боевых условия, в том числе путем расширения функциональных возможностей этого комплекса.
Для этого в наземном робототехническом комплексе, в состав которого входят один, несколько или множество мобильных роботов, средство их парковки и пост дистанционного управления движением и/или функциональным оборудованием этих мобильных роботов, каждый из которых содержит самоходную транспортную платформу с электрическим приводом ее гусениц или колес, контроллер и систему дистанционной проводной и/или беспроводной связи, приспособленную для единовременного, или периодического, или постоянного обмена информацией с указанным постом дистанционного управления, и/или с другим мобильным роботом, и/или со средством парковки, реализовано одно или одновременно несколько следующих технических решений в их любом сочетании:
- средство парковки мобильных роботов выполнено на базе гусеничной или колесной машины с электромеханической трансмиссией, источник энергии которой используется для непрерывного электроснабжения мобильных роботов и/или для периодической зарядки их бортовых источников питания;
- в мобильных роботах реализована возможность соединения электрических цепей их питания и обмена электрической энергией;
- один из мобильных роботов выполнен в виде робота-энергоносителя («заправщика»), обеспечивающего электрической энергией другие роботы;
- в системе дистанционной проводной связи реализована возможность передачи информационных сигналов по проводам питания;
- средство парковки выполнено на основе крана-манипулятора или содержит устройство погрузки/разгрузки и/или перемещения мобильных роботов, реализованное, в частности, в виде грузоподъемного крана;
- мобильный робот и/или средство парковки имеет тягово-сцепное устройство, которое приспособлено для дистанционного управления или автоматической сцепки и выполнено электромеханическим, или на основе электропостоянного магнита, или на основе вакуумного захвата;
- мобильный робот выполнен с возможностью прокладки электрического кабеля, или трубопровода, или буксирного каната, а средство парковки - с возможностью передачи по нему, соответственно, электрической энергии, топлива или воды, или контейнеров с предметами снабжения (грузами);
- пост дистанционного управления выполнен автономным и обеспечивает дистанционное управление движением и/или оборудованием как мобильных роботов, так и средства парковки;
- контроллер каждого мобильного робота содержит цифровой вычислитель с энергонезависимой памятью, в которую записана программа управления движением и/или функциональным оборудованием этого мобильного робота в автономном режиме, причем программа автономной работы предусматривает возможность достижения предварительно установленного результата работы мобильного робота, или группы мобильных роботов, или их роя;
- контроллер каждого мобильного робота содержит цифровой вычислитель с энергонезависимой памятью и приспособлен для обмена информацией с контроллерами других мобильных роботов с использованием систем дистанционной проводной и/или беспроводной связи, а также обеспечивает управление движением и/или функциональным оборудованием мобильных роботов в режиме синхронного и/или группового управления, причем порядок обмена информацией между ними, порядок синхронного и/или группового управления, а также необходимость и/или порядок определения ведущего мобильного робота в их группе или рое, записаны в энергонезависимую память цифрового вычислителя каждого мобильного робота;
- контроллер каждого мобильного робота содержит цифровой вычислитель с энергонезависимой памятью и обеспечивает автоматическое формирование сигналов управления его движением из условия автоматического возврата мобильного робота в начальную точку траектории его движения или перемещения к средству парковки в случае выявления контроллером обстоятельства, исключающего возможность выполнения мобильным роботом программы или получения ожидаемого результата его работы (в случае потери предметов снабжения (транспортируемого груза), неисправности функционального оборудования, недопустимо большом разряде автономного источника питания, исчерпании запаса кабеля в проводной линии связи и т.п.), причем порядок выявления этого обстоятельства предварительно определен и записан в энергонезависимую память цифрового вычислителя контроллера;
- мобильный робот оснащен средством защиты от электромагнитных излучений, и/или снижения, и/или подавления электромагнитных излучений, создаваемых его электроприводом, контроллером и/или системой связи;
- линия проводной связи мобильного робота со средством парковки выполнена экранированной, и/или в виде витой пары проводов, и/или оснащена фильтрами, приспособленными для защиты мобильного робота от естественных и искусственных электромагнитных помех, а также для снижения электромагнитного излучения этой линии;
- мобильный робот содержит средство акустической маскировки, выполненное в виде имитатора звука какого-либо объекта и предназначенное для введения противника в заблуждение относительно наличия или положения этого объекта, и/или в виде устройства, обеспечивающего снижение и/или подавление акустического шума, создаваемого мобильным роботом при его движении;
- мобильный робот и средство парковки и/или пост дистанционного управления оснащены переговорными устройствами и/или приспособлены для соединения с внешними устройствами и выполнены с возможностью голосовой связи между ними и/или приема/передачи аналоговой и/или цифровой информации с использованием систем дистанционной проводной и/или беспроводной связи мобильных роботов;
- мобильный робот дополнительно оснащен беспилотным летательным аппаратом винтового типа и имеет проводную линию связи с ним, причем нагрузочная способность (прочность) этой линии выбрана из условия возможности ее использования в качестве грузового каната для подъема и/или перемещения мобильного робота с его функциональным оборудованием и/или предметами снабжения (полезным грузом), и/или беспилотный летательный аппарат содержит видеокамеру и выполнен с возможностью передачи визуальной информации об окружающей обстановке на мобильный робот и/или на пост дистанционного управления, и/или беспилотный летательный аппарат содержит антенну системы дистанционной беспроводной связи.
Указанные отличительные альтернативные признаки изобретения находятся в прямой причинно-следственной связи с достигаемым техническим результатом, поскольку их реализация обеспечивает создание наземного робототехнического комплекса, обладающего повышенной эффективностью и надежностью выполнения задач материально-технического обеспечения воинских подразделений первого эшелона (переднего края) сухопутных войск в боевых условия, в том числе путем расширения функциональных возможностей этого комплекса.
В частности, выполнение средства парковки на базе гусеничной или колесной машины с электромеханической трансмиссией, источник энергии которой используется для непрерывного электроснабжения мобильных роботов и/или для зарядки их бортовых источников питания, обеспечивает повышение эффективности и надежности решения робототехническим комплексом поставленных перед ним задач МТО за счет надежного обеспечения мобильных роботов энергией практически неограниченной мощности. Это позволяет увеличить радиус действия мобильных роботов, увеличить скорость их движения и тяговое усилие. Например, обеспечить более оперативную доставку предметов снабжения повышенной массы.
Обеспечение возможности соединения электрических цепей питания мобильных роботов и передачи электрической энергии от одного мобильного робота к другому, предусмотренное вторым отличительным признаком изобретения, обеспечивает увеличение дальности действия (зоны работы) мобильных роботов, возможность возврата к средству парковки мобильного робота с разряженным автономным с источником энергии, позволяет выполнять задачи МТО цепочкой мобильных роботов, последовательно включающихся в работу, что повышает эффективность применения наземного робототехнического комплекса и надежность решения с его помощью задач МТО.
К этому же результату и по тем же причинам приводит применение специального робота-энергоносителя («заправщика электрической энергией»), приспособленного для передачи электрической энергии от средства парковки мобильных роботов и/или от источника энергии робота-энергоносителя другому мобильному роботу.
Обеспечение возможности передачи информационных сигналов по проводам, приспособленным для передачи электрической энергии мобильному роботу, приводит к сокращению необходимого числа проводов в кабеле проводной линии связи мобильного робота со средством парковки или с постом дистанционного управления. Это приводит к увеличению максимально возможной длины линии связи и, соответственно, дальности действия мобильных роботов, за счет сокращения толщины кабеля и его массы, приходящейся на единицу длины. Если максимальная дальность действия мобильного робота определена заранее, то сокращение толщины и массы кабеля позволяет уменьшить габаритные размеры и массу кабельного барабана, размещенного на мобильном роботе, что обеспечивает возможность размещения на мобильном роботе более крупногабаритного и более тяжелого функционального оборудования и большего количества предметов снабжения (полезного груза), что также приводит к повышению эффективности применения и надежности наземного робототехнического комплекса при решении задач МТО.
Реализация пятого альтернативного отличительного признака изобретения, заключающегося в реализации средства парковки на основе крана-манипулятора или его оснащения устройством погрузки/разгрузки и/или перемещения двух или более мобильных роботов, например, грузоподъемным краном, позволяет сократить время развертывания наземного робототехнического комплекса, обеспечить оперативную эвакуацию мобильных роботов, погрузку на них предметов снабжения (грузов) при решении задач МТО, а также сократить время передислокации всего наземного робототехнического комплекса с целью его выведения из зоны огневого воздействия противника и т.д. Это приводит к повышению продолжительности работы робототехнического комплекса, эффективности его применения, надежности и функциональных возможностей.
Оснащение мобильного робота и/или средства парковки тягово-сцепным устройством (электромеханическим, на основе электропостоянного магнита или вакуумного захвата) с дистанционным управлением или автоматической сцепкой позволяет обеспечит оперативную эвакуацию мобильных роботов в случае их выхода из строя, застревания, опрокидывания, исчерпания запаса энергии автономного источника питания и т.д., в том числе для ремонта мобильных роботов, их технического обслуживания и приведения в рабочее положение, что позволяет сократить время вынужденного простоя (бездействия) мобильных роботов. Благодаря этому обеспечивается расширение функциональных возможностей наземного робототехнического комплекса и, соответственно, эффективности применения и повышение надежности выполнения с его помощью задач МТО.
Прокладка с помощью мобильного робота электрического кабеля, трубопровода или буксирного каната с последующей передачей по нему от средства парковки, соответственно, электрической энергии, топлива, воды или контейнеров с предметами снабжения, предусмотренное седьмым отличительным признаком изобретения, позволяет расширить функциональные возможности и повысить надежность и эффективность применения наземного робототехнического комплекса при решении задач МТО, особенно в условиях огневого соприкосновения с противником. Поскольку в этом случае для обеспечения подразделений материально-техническими ресурсами, в том числе в больших объемах, достаточно одного прохода мобильного робота.
Выполнение поста дистанционного управления с возможностью управления движением и оборудованием как мобильных роботов, так и средства их парковки, позволяет обеспечить оперативную передислокацию средства парковки без прекращения работы мобильных роботов, что приводит к значительному повышению мобильности наземного робототехнического комплекса, а также надежности и эффективности выполнения задач МТО в условиях непосредственного огневого соприкосновения с противником.
Реализация автономной работы каждого мобильного робота, предусмотренная девятым отличительным признаком изобретения, приводит к повышению эффективности применения, надежности и мобильности наземного робототехнического комплекса при выполнении поставленных перед ним задач МТО за счет обеспечения возможности выполнения этих задач при нарушении работоспособности поста дистанционного управления и/или средства парковки. В частности, в случае их поражения огнем противника.
К этому же результату приводит реализация десятого отличительного признака изобретения, в соответствии с которым в наземном робототехническом комплексе предусматривается возможность обмена информацией между мобильными роботами и обеспечение их синхронного и/или группового управления движением и/или функциональным оборудованием. В этом случае повышение эффективности применения, надежности, мобильности и функциональных возможностей наземного робототехнического комплекса при выполнении задач МТО достигается за счет использования двух или более мобильных роботов для решения одной задачи. При этом отказ или поражение одного мобильного робота огнем противника, а также потеря связи одного мобильного робота с постом дистанционного управления, не оказывает влияния на решение задачи МТО, которую должен решить наземный робототехнический комплекс.
Реализация автоматического возврата мобильного робота в начальную точку траектории его движения или к средству парковки при возникновении обстоятельства, предопределяющего невозможность выполнения мобильным роботом программы его работы или невозможность получения необходимого ее результата (в случае потери предметов снабжения (транспортируемого груза), неисправности функционального оборудования, разряда автономного источника питания, исчерпания запаса кабеля в проводной линии связи и т.п.) позволяет сократить потери мобильных роботов, а также время их нахождения в нерабочем состоянии, что также обеспечивает повышение эффективности применения и надежности выполнения наземным робототехническим комплексом задач МТО за счет расширения его функциональных возможностей.
Оснащение мобильного робота средствами защиты от электромагнитных излучений и/или средствами снижения и/или подавления электромагнитных излучений, создаваемых его электроприводом, контроллером, электронной аппаратурой системы дистанционной проводной и/или беспроводной связи (оснащение экранами фильтрами, компонентами с пониженным быстродействием и т.п.) и самой линии проводной связи (выполнение ее экранированной, в виде витой пары проводов и/или оснащенной фильтрами), снижает вероятность обнаружения мобильного робота противником с помощью средств радиоэлектронной разведки и, соответственно, вероятность его уничтожения, а также позволяет предотвратить выход мобильного робота из строя и нарушение его функционирования вследствие воздействия естественных и искусственных электромагнитных помех. Поэтому реализация этих альтернативных отличительных признаков изобретения также обеспечивает повышение эффективности применения и надежности выполнения задач МТО данным наземным робототехническим комплексом.
К этому же результату приводит оснащение мобильного робота средствами акустической маскировки, обеспечивающими снижение, либо пассивное или активное подавление акустического шума, создаваемого мобильным роботом при его движении, или имитацию звука какого-либо объекта. Обеспечение скрытности движения мобильных роботов, предотвращение их идентификации противником, а также введение противника в заблуждение относительно размеров и/или направления их движения, обеспечивает снижение вероятности поражения мобильных роботов огнем противника и, соответственно, обеспечивает повышение эффективности применения наземного робототехнического комплекса, в том числе его надежности.
При ведении маневренных боевых действий пункты управления могут часто перемещаться, что требует более быстрого развертывания средств связи, обеспечения связи в движении и с коротких остановок. Поэтому оснащение мобильных роботов, средства парковки и поста дистанционного управления переговорными устройствами или обеспечение возможности подключения к ним внешних средств приема/передачи аналоговой и/или цифровой информации, обеспечивающими возможность голосовой связи или обмена между ними почтовыми сообщениями, необходимыми для управления подразделениями, для информирования о необходимости пополнения запаса боеприпасов, вооружения, топлива и т.п., приводит к существенному повышению эффективности применения наземного робототехнического комплекса расширению и надежности выполнения задач МТО. Указанное расширение функциональных возможностей этого комплекса позволяет повысить устойчивость и оперативность управления этим комплексом, обеспечить своевременность применения функционального оборудования мобильных роботов. Например, в случае потери связи между подразделениями, к ним оперативно могут быть направлены мобильные роботы, переговорные устройства которых обеспечат восстановление связи. По данному каналу связи может быть передана информация о необходимости изменения задач МТО, решаемых мобильными роботами, что также обеспечивает повышение эффективности применения наземного робототехнического комплекса.
В соответствии с последним отличительным признаком изобретения мобильный робот дополнительно оснащен беспилотным летательным аппаратом винтового типа и имеет проводную линию связи с ним. Запас прочности этой линии выбран из условия возможности ее использования в качестве грузового каната для подъема и/или перемещения мобильного робота с его функциональным оборудованием и/или предметами снабжения. Это обеспечивает повышение эффективности применения наземного робототехнического комплекса и надежности решения с его помощью задач МТО в тех случаях, когда мобильный робот не имеет возможности самостоятельно прибыть в конечную точку заданной траектории его движения. Например, не может преодолеть глубокий ров или подняться по вертикальной стене. В этом случае беспилотный летательный аппарат осуществляет перемещение или подъем лишь линии связи с ним, а лица, для которых предназначены перемещаемые мобильным роботом предметы снабжения, имеют возможность поднять или отбуксировать мобильный робот с этими предметами, используя линию связи в качестве грузоподъемного (буксирного) каната. Применение на мобильном роботе беспилотного летательного аппарата с видеокамерой или антенной системы дистанционной беспроводной связи также приводит к повышению эффективности применения наземного робототехнического комплекса за счет расширения его функциональных возможностей - получения визуальной информации об окружающей обстановке для оптимизации трассы доставки предметов снабжения (полезных грузов), а также за счет повышения устойчивости работы средства связи мобильного робота с постом дистанционного управления.
Влияние отличительных признаков данного изобретения на указанный технический результат дополнительно показано также при описании примеров его осуществления.
В наземном робототехническом комплексе может быть реализован как один из указанных отличительных признаков независимого пункта формулы изобретения, так и одновременно несколько отличительных признаков в их любом сочетании, причем от количества реализованных отличительных признаков зависит уровень достижения этого технического результата.
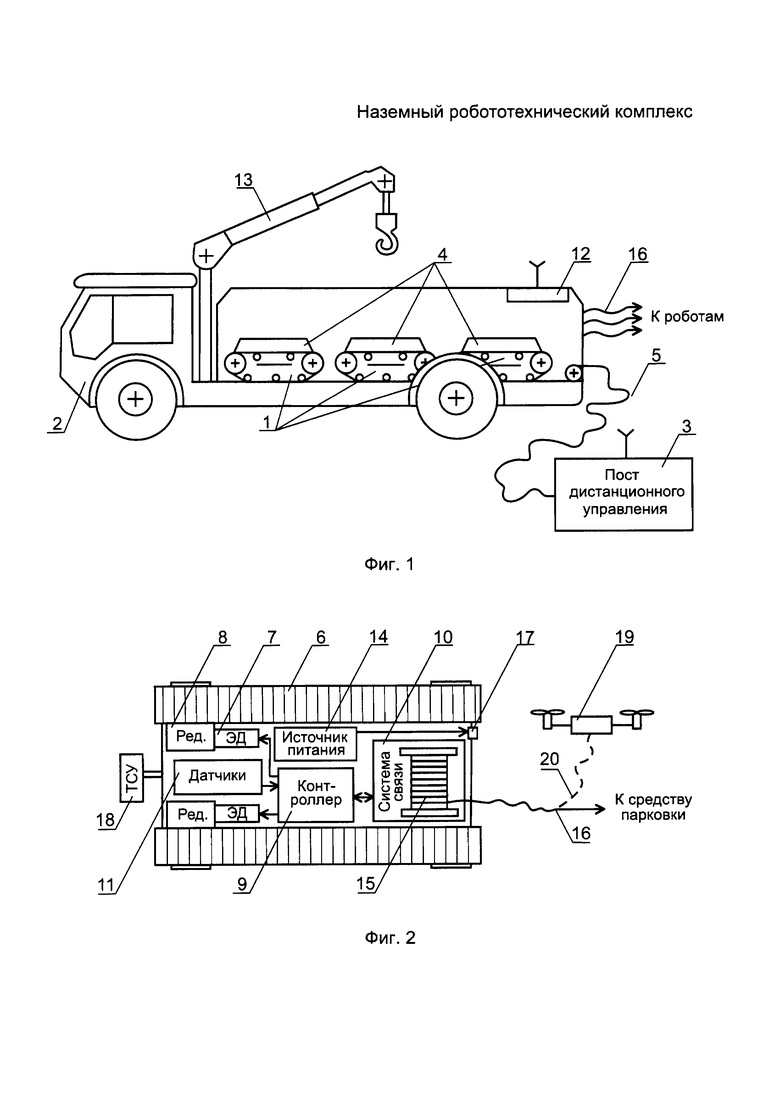
Для пояснения технической сущности, принципа действия и возможности осуществления предложенного устройства на фиг. 1 в качестве примера показано средство парковки мобильных роботов, реализованное на базе крана-манипулятора, а на фиг. 2 - упрощенная схема одного из мобильных роботов.
В состав наземного робототехнического комплекса входят один, несколько или множество мобильных роботов 1, средство их парковки 2 и пост дистанционного управления 3 движением и/или функциональным оборудованием 4 мобильных роботов.
Пост дистанционного управления 3 может именоваться также пунктом дистанционного управления, панелью или рабочим местом оператора и командира и т.п. Он может быть выполнен автономным, размещенным внутри средства парковки 2 или соединенным с ним с помощью проводной линии связи 5, как это показано на фиг. 1, и содержит стационарные или мобильные рабочие места оператора и, при необходимости, командира. Этот пост обеспечивает передачу на мобильные роботы параметров задач МТО, программ работы мобильных роботов, формирование и передачу команд дистанционного управления движением и функциональным оборудованием мобильных роботов, а также, в случае необходимости, движением и оборудованием средства парковки. С помощью поста дистанционного управления 3 осуществляется также дистанционный контроль за работой мобильных роботов 1 и считывание данных регистраторов их параметров. Этот пост может содержать, например, комплект очков или шлемов виртуальной реальности, органы или пульты управления движением мобильного робота и средства парковки (джойстик, рулевое колесо, педали и т.п.), органы и пульты управления оборудованием мобильных роботов и средства парковки (джойстики, переключатели, клавиши и т.п.), оборудованные соответствующими дисплеями, звуковыми и световыми сигнализаторами, цифровыми вычислителями и средствами проводной и/или беспроводной связи.
Для локального управления средством парковки и мобильными роботами, в частности, во время их подготовки к работе и при проведении технического обслуживания и ремонта, на них могут быть установлены дополнительные (технологические) пульты (посты) управления.
Функциональное оборудование 4 может быть самым разнообразным и может именоваться рабочим оборудованием, полезной нагрузкой, рабочим органом, навесным оборудованием и т.п. Оно может быть выполнено, в частности, в виде грузовой платформы, грузоподъемного оборудования (крана), устройства погрузки/выгрузки, осветительного оборудования, светового или акустического сигнального устройства, оборудования для тушения пожара, транслятора радиорелейной системы, манипулятора, оборудования для выполнения земляных работ, оборудования для демонтажа и разрушения строительных конструкций, тягово-сцепного устройства, оборудования для технического обслуживания и ремонта других мобильных роботов и т.д.
В случае, если наземный робототехнический комплекс предназначен для решения как задач МТО, так и иных задач, в том числе боевых задач, задач разведки и инженерных задач, то функциональное оборудование мобильного робота может быть выполнено в виде огнестрельного оружия, гранатомета, огнемета, оборудования для обнаружения и/или обезвреживания взрывоопасных предметов, оборудования для химической и/или радиационной разведки и/или защиты, устройства для постановки дымовой завесы, осветительного оборудования, светового и/или акустического сигнального устройства, оборудования для постановки (формирования и излучения) радиопомех, оборудования для тушения пожара, транслятора радиорелейной системы, оборудования для выполнения земляных работ, оборудования для демонтажа и разрушения строительных конструкций и промышленного оборудования и т.п.
Каждый мобильный робот 1 содержит самоходную гусеничную или колесную транспортную платформу 6 с электрическим приводом ее хода, состоящим из электродвигателей 7 и редукторов 8, а также контроллер 9 и систему дистанционной проводной и/или беспроводной связи 10, предназначенную для единовременного, периодического или постоянного обмена информацией мобильного робота 1 с постом дистанционного управления 3, с другим мобильным роботом или со средством парковки 2.
Контроллер 9 может именоваться также блоком управления, бортовой ЭВМ, информационно-управляющим блоком и т.п.Он является основным электронным блоком электрической части мобильного робота, которая может именоваться также системой контроля, защиты и управления, системой электрооборудования и т.д. В состав контроллера входят силовые электронные ключи электродвигателей 7 и исполнительных устройств функционального оборудования 4, драйверы этих ключей, цифровой вычислитель (микроконтроллер, цифровой сигнальный процессор и т.п.) с энергонезависимой памятью, в которую записана программа его работы, а также интерфейсные схемы, обеспечивающие согласование входных/выходных цепей цифрового вычислителя (микроконтроллера, цифрового сигнального процессора) с системой дистанционной проводной и/или беспроводной связи 10 и бортовыми датчиками 11.
Контроллер обеспечивает обмен информацией с постом дистанционного управления 3 либо непосредственно, либо через средство парковки 2, а также, в случае необходимости, с другими мобильными роботами с использованием систем дистанционной проводной и/или беспроводной связи 10, 12 мобильных роботов и средства парковки. Контроллер 9 осуществляет также обработку выходных сигналов бортовых датчиков 11 и формирование сигналов управления электродвигателями 7 привода гусениц или колес и исполнительными электромеханическими или электрогидравлическими устройствами функционального оборудования 4.
В состав бортовых датчиков 11 могут входить датчики параметров, режимов работы и технического состояния транспортной платформы 6 и функционального оборудования 4 (датчики температуры, давления, момента, угловой скорости, напряжения, тока, уровня заряда аккумуляторной батареи, продольного и поперечного крена и т.п.), а также датчики стерео-визуальной, лазерной, ультразвуковой, радиолокационной, магнитометрической, курсо-одометрической, бесплатформенной инерциальной и глобальной спутниковой навигации.
Обмен информационными сигналами между мобильными роботами, постом дистанционного управления 3 и, при необходимости, средством парковки 2, может осуществляться с использованием стандарта промышленной сети CAN (Controller Area Network - сеть контроллеров), ориентированной на объединение в единую сеть различных устройств с использованием последовательного, широковещательного и пакетного режимов передачи. Возможно также применение интерфейсов LIN (Local Interconnection Network), RS-485 (стандарт EIA/TIA) и т.д., а также беспроводных интерфейсов типа ZigBee (стандарт IEEE 802.15.4), Wi-Fi (стандарт IEEE 802.11), Bluetooth (стандарт IEEE 802.15.1) и т.п.
Средство парковки 2 может быть выполнено базе гусеничной или колесной машины (на фиг. 1 показана колесная машина), предпочтительно бронированной и имеющей электромеханическую трансмиссию, и может быть оснащено устройством погрузки/разгрузки и/или перемещения мобильных роботов 1, например, грузоподъемным краном 13.
Источник энергии электромеханической трансмиссии может использоваться для непрерывного электроснабжения мобильных роботов, либо для периодической зарядки их автономных бортовых источников питания (аккумуляторных батарей) 14, если мобильные роботы содержат такие источники.
В первом случае на мобильный робот устанавливается кабельный барабан с токосъемником 15 и его электропитание осуществляется по проводам 16 от средства парковки 2 либо непосредственно, либо через пост дистанционного управления. Во втором случае мобильный робот 1 имеет электрический разъем 17. С его помощью автономный бортовой источник питания 14 подключается для его подзарядки к средству парковки 2, или к посту дистанционного управления, или к электрическим цепям питания другого мобильного робота.
Возможна также реализация одного из мобильных роботов в виде специализированного робота-энергоносителя («заправщика электрической энергией»), который не имеет функционального оборудования и оснащен аккумуляторной батареей повышенной емкости или компактным двигателем внутреннего сгорания с электрическим генератором. В процессе работы наземного робототехнического комплекса робот-энергоноситель может в автоматическом режиме или по командам оператора, передаваемым с поста дистанционного управления 3, приблизиться к мобильному роботу с разряженным автономным источником энергии 14 до соединения их электрических разъемов 17 и обеспечить пополнение запаса электрической энергии этого автономного источника питания.
Мобильный робот и/или средство парковки могут быть оснащены тягово-сцепным устройством (ТСУ) 18, которое приспособлено для дистанционного управления или автоматической сцепки при его контакте с буксируемым (транспортируемым, поднимаемым) объектом и выполнено электромеханическим, в виде вакуумного захвата или на основе электропостоянного магнита. В последнем случае ТСУ выполнено в виде группы шарнирно соединенных между собой магнитных захватов, каждый из которых содержит основные магниты из материала неодим-железо-бор (NdFeB), обратимые магниты из материала Альнико (AlNiCo, ЮНДК) и обмотку, соединенную с контроллером 9 и обеспечивающую управление ТСУ путем создания магнитного потока, перемагничивающего обратимый магнит.
Линия связи 16 мобильного робота 1 со средством парковки 2 может одновременно использоваться для обеспечения мобильного робота электрической энергией. С этой целью в линии связи 16 используются провода с медными жилами, сечение которых выбирается из условия передачи по ним электрического тока необходимой величины. При необходимости, на входе и выходе этой линии устанавливаются, соответственно, повышающий и понижающий преобразователи напряжения.
Электрическое питание поста дистанционного управления 3 также может осуществляться от средства парковки 2 по линии связи 5. Возможно также оснащение поста дистанционного управления автономным источником питания, например, аккумуляторной батареей, периодически подзаряжаемой от источника энергии средства парковки. Если автономный источник питания поста дистанционного управления имеет достаточный запас мощности и емкости, то к этому источнику по линиям связи 16 могут быть подключены мобильные роботы 1.
Линия связи 16 может быть выполнена с повышенным запасом прочности, обеспечивающим возможность ее использования в качестве грузового или буксирного каната. С этой целью она может быть выполнена, в частности, в виде двухжильного кабеля с армированной оболочкой или с витой пары проводов, токопроводящие жилы которых состоят из медных проволок и прочных армирующих элементов. В качестве материала для этого армирования используется сталь, пара-арамид (кевлар, тварон), зайлон, высокопрочное углеволокно, спектра/дайнема, цетран, текнора блэк или вектран. Возможно также включение в состав линии связи отдельного буксирного (грузового) каната, выполненного из одного из указанных материалов. Благодаря такой конструкции линии связи, при решении задач МТО в неблагоприятной обстановке обеспечивается возможность подъема мобильного робота с его функциональным оборудованием и/или предметами снабжения (полезным грузом), например, на верхние этажи здания при разрушенных лестничных маршах, вытаскивание с помощью этой линии застрявшего или опрокинувшегося мобильного робота, перемещение контейнеров с предметами снабжения и т.п.
Благодаря наличию электрических разъемов 17, линия электрического питания мобильного робота, специально предназначенная для этой цели или выполненная совмещенной с линией связи 16, может быть использована для обеспечения электрической энергией внешних потребителей. С этой целью параллельно с линией связи 17 может быть уложен также отдельный электрический кабель. Кроме того, параллельно электрическим проводам может быть уложен гибкий трубопровод с соответствующей установкой гидравлического вращающегося соединения в кабельном барабане 15. В последнем случае при решении задач МТО по этому трубопроводу от средства парковки 2 может передаваться топливо или вода.
Мобильный робот и линия его связи 16 со средством парковки 2 или с постом дистанционного управления 3 имеет средства защиты от воздействия на них естественных и искусственных электромагнитных излучений (помех), а также средства снижения и подавления электромагнитных излучений, создаваемых электроприводом, контроллером 9 и системой проводной и/или беспроводной связи 10. К ним относятся электромагнитные экраны, фильтры верхних частот и элементы электрической части контроллера 9, ограничивающие скорость изменения напряжений и токов, протекающих в его силовых цепях. Такие фильтры, в частности, установлены в линии проводной связи 16, которая дополнительно может быть выполнена экранированной или в виде витой пары (витых пар) проводов.
Мобильный робот может также содержать технические средства активной или пассивной акустической маскировки. Например, звукопоглощающие или звукоотражающие шторы, жалюзи, акустические демпферы и т.д., а также имитатор звука какого-либо объекта, выполненный в виде возбудителя акустического поля (акустического излучателя, громкоговорителя) с усилителем мощности, соединенным с контроллером, в энергонезависимой памяти которого записан сигнал, имитирующий акустическое излучение этого объекта.
Если мобильный робот содержит устройство активного подавления акустического шума, то в его состав входит акустический приемник давления (микрофон) с электронным преобразователем, содержащим цифровой сигнальный процессор и усилитель, соединенный с возбудителем акустического поля (громкоговорителем). Это устройство во время движения мобильного робота осуществляет компенсацию создаваемого им шума, обеспечивая минимальную интенсивность результирующего акустического сигнала, создаваемого мобильным роботом и возбудителем акустического поля (громкоговорителем).
Мобильные роботы, средство парковки и пост дистанционного управления могут быть оснащены переговорными устройствами, обеспечивающими возможность использования их систем проводной и/или беспроводной связи 10, 12 для организации голосовой (телефонной) связи. Возможно также их оснащение интерфейсными устройствами, обеспечивающими возможность передачи по линиям связи 5, 16 различных информационных сигналов и почтовых сообщений. В частности, сигналов всемирной системы компьютерных сетей Интернет.
Мобильный робот может быть также оснащен беспилотным летательным аппаратом винтового типа 19 с проводной линией связи 20. В случае установки на него видеокамеры или антенны системы дистанционной беспроводной связи, обеспечивается возможность передачи на пост дистанционного управления 3, соответственно, визуальной информации об окружающей обстановке или увеличения дальности действия беспроводной связи.
Проводная линия связи 20 также может быть выполнена с повышенным запасом прочности. Это открывает возможность использования беспилотного летательного аппарата в качестве средства доставки грузового (буксирного) каната, с помощью которого возможны подъем или буксировка мобильного робота с его функциональным оборудованием и предметами снабжения (полезным грузом). Например, если при решении задачи МТО мобильный робот не может доставить предметы снабжения в конечную точку назначения, то в эту точку по сигналам с поста дистанционного управления 3 или в автоматическом режиме под управлением контроллера 9 направляется беспилотный летательный аппарат 19. Далее лица, которым направлены эти предметы снабжения, поднимают или буксируют их вручную или с помощью лебедки, используя грузовой (буксирный) канат или проводную линию связи 20 в качестве этого каната.
Предложенный наземный робототехнический комплекс работает следующим образом.
Доставку мобильных роботов 1 на место работы наземного робототехнического комплекса и их подготовку к выполнению задач МТО обеспечивает самоходное бронированное средство парковки 2, управляемое либо из его кабины, либо с поста дистанционного управления 3 по системе беспроводной связи (по радиоканалу) 12 или по проводной линии связи 5.
После прибытия средства парковки на место назначения, осуществляется саморазгрузка мобильных роботов, либо их разгрузка с помощью грузоподъемного крана 13.
При решении задач МТО средство парковки 2 одновременно используется для доставки как мобильных роботов, так и предметов снабжения (грузов) на место развертывания наземного робототехнического комплекса. Для этой доставки может использоваться также отдельное транспортное средство, разгрузка которого осуществляется грузоподъемным краном 13.
Двигатель внутреннего сгорания средства парковки 2 является первичным источником энергии для обеспечения движения средства парковки и работы его оборудования (в частности, грузоподъемного крана 13), а также для работы мобильных роботов 1. Соединенный с ним электрический генератор, обеспечивает электрической энергией все составные части наземного робототехнического комплекса либо непосредственно, либо с промежуточным накоплением энергии в аккумуляторной батарее средства парковки или поста дистанционного управленния.
При решении задач МТО на грузовые платформы мобильных роботов с помощью грузоподъемного крана 13 или в ручном режиме устанавливаются предметы снабжения (полезный груз). Например, ящики с патронами, контейнеры со снарядами, емкости с топливом и т.д.
В энергонезависимую память цифрового вычислителя контроллера 9 с поста дистанционного управления 3 записываются параметры маршрута (траектории) движения каждого мобильного робота, в том числе координаты их конечных точек (пунктов). Указанная запись может осуществляться однократно или периодически по радиоканалу или по проводной линии связи 16 с поста дистанционного управления 3 или путем подключения к цифровому вычислителю контроллера 9 мобильного носителя информации, например, USB-флеш накопителя.
После этого оператор с помощью органов управления поста дистанционного управления 3 формирует сигналы начала работы каждого мобильного робота, которые также передаются по системе дистанционной проводной и/или беспроводной связи 10 на их контроллеры 9.
Цифровой вычислитель контроллера 9 осуществляет обработку выходных сигналов бортовых датчиков 11, включая навигационные датчики, обеспечивая отслеживание окружающей обстановки, а также определение местоположения мобильного робота на местности и выявление препятствий на пути его движения.
Отслеживание окружающей обстановки может осуществляться через построение карты глубины окружающего пространства в реальном времени с использованием видеокамер (стереопары), времяпролетной (ToF) видеокамеры, либо сканирующего лазерного, ультразвукового или радиолокационного (микроволнового) дальномера. Определение местоположения мобильного робота с целью повышения эффективности управления и повышения надежности работы всего наземного робототехнического комплекса в общем случае осуществляется путем комплексирования информации с различных систем определения этого местоположения (курсо-одометрической, магнитометрической, бесплатформенной инерциальной, глобальной спутниковой навигационной системы и т.д.). Далее с использованием карты глубины цифровым вычислителем контроллера 9 решается задача трехмерной реконструкции (построения) окружающей обстановки и/или поверхности, по которой движется мобильный робот, в том числе препятствий на пути его движения. Используя сформированную реконструкцию окружающей обстановки и информацию о местонахождении в ней мобильного робота, цифровой вычислитель контроллера 9 определяет безопасную траекторию движения мобильного робота (его платформы 6).
После этого контроллер 9 формирует сигналы управления электродвигателями 7, обеспечивая движение мобильного робота по заданному маршруту или в заданный конечный пункт этого маршрута с обходом выявленных препятствий, одновременно осуществляя при этом управление функциональным оборудованием 4.
При возникновении непредвиденных ситуаций, выявляемых цифровым вычислителем контроллера 9, а также в зависимости от сложившейся обстановки или профиля трассы движения, осуществляется переход режима работы контроллера 9 от автоматического управления электродвигателями 7 привода гусениц или колес на дистанционное и обратно. Дистанционное управления движением каждого мобильного робота осуществляет оператор с поста дистанционного управления 3, оценивая окружающую обстановку, в частности, с помощью стерео-визуальных датчиков (видеокамер, стереопары) 11, установленных на каждом мобильном роботе.
При выявлении контроллером 9 обстоятельства, предопределяющего невозможность выполнения мобильным роботом программы его работы или достижения предварительно установленного результата этой работы, а именно, при потере предметов снабжения (транспортируемого груза), неисправности функционального оборудования 4, недопустимо большом разряде автономного источника питания 14, исчерпании запаса кабеля в проводной линии связи 16 между мобильным роботом и средством парковки и т.п., контроллер 9 переходит в режим формирования сигналов управления электродвигателями 7 привода гусениц или колес из условия автоматического возврата мобильного робота в начальную точку траектории его движения или перемещения к средству парковки 2.
При выявлении недопустимо большого разряда автономного источника питания 14 мобильного робота, к нему может быть направлен другой мобильный робот или специальный робот-энергоноситель («заправщик»). После объединения их цепей питания с помощью электрических разъемов 17, осуществляется необходимое пополнение электрической энергией автономного источника питания 14 и мобильный робот переходит в рабочее состояние.
В случае отказа мобильного робота к нему направляется другой мобильный робот, который с помощью тягово-сцепного устройства 18 осуществляет его буксировку, например, к средству парковки для проведения ремонта.
При застревании или опрокидывании мобильного робота к нему также направляется другой мобильный робот, функциональное оборудование которого выполнено в виде грузоподъемного крана, обеспечивающего вытаскивание застрявшего (утонувшего) или опрокинувшегося мобильного робота и его установку на гусеницы или колеса.
С целью повышения эффективности выполнения задач МТО, особенно в условиях непосредственного огневого соприкосновения с противником, в программе работы цифрового вычислителя контроллера 9 каждого мобильного робота предусмотрена возможность его автономной работы. При этом условия и пределы самостоятельности каждого мобильного робота в части его движения и работы функционального оборудования, предварительно определены и записаны в энергонезависимую память цифрового вычислителя контроллера 9 каждого мобильного робота в виде программы ег работы.
Эта программа предусматривает возможность достижения предварительно установленного результата работы каждого мобильного робота, их группы или роя. Она может предусматривать, в частности, реализацию синхронного или группового управления мобильными роботами. В этом случае программа работы цифрового вычислителя контроллера, кроме решения задач управления, дополнительно определяет порядок обмена информацией между мобильными роботами, а также необходимость и порядок определения ведущего мобильного робота в их группе или рое.
В частности, при решении задач МТО групповое управление мобильными роботами необходимо для доставки предметов снабжения (грузов), масса или сила сопротивления передвижению (буксировки) которых превышает грузоподъемность или максимально возможное тяговое усилие одного мобильного робота.
В случае выхода из строя поста дистанционного управления или полной потери связи с ним, мобильные роботы, в соответствии с программой их работы, предварительно записанной в энергонезависимую память цифрового вычислителя контроллера 9 каждого робота, организуют децентрализованную самоорганизующуюся систему. В этом случае программа работы каждого мобильного робота предусматривает выполнение общей задачи, поставленной перед группой или роем роботов, а также взаимодействие с другими мобильными роботами, например, для обеспечения необходимой дистанции между ними, и с окружающей средой (движение по заданному маршруту или в заданную конечную точку в обход выявленных препятствий) и т.п.
В частности, каждый мобильный робот, образующий рой роботов, имеет функциональное оборудование 4, выполненное в виде грузовой платформы с грузоподъемным механизмом (краном 13), и решает задачу перемещения множества средств снабжения (грузов) с одной площадки на другую, самостоятельно осуществляя при этом загрузку/разгрузку этих средств снабжения на свою грузовую платформу и их транспортировку с учетом реальных препятствий на траектории их движения (местности) без столкновений с другими мобильными роботами.
Такое коллективное поведение мобильных роботов, при котором каждый мобильный робот выполняет ряд простых функций, предусмотренных программой работы его цифрового вычислителя, взаимодействуя при этом с другими мобильными и окружающей обстановкой, основано на принципах децентрализованной самоорганизующейся системы, известной как роевой интеллект. Оператору такого робототехнического комплекса достаточно лишь однократно передать мобильным роботам информацию о решаемой задаче МТО.
Количество мобильных роботов в рое может быть неопределенным, а распределение локальных задач между ними происходит динамически по мере появления свободных мобильных роботов или при выходе части этих роботов из строя. Это обеспечивает независимость функционирования и жизнеспособность объединения мобильных роботов в единое целое и, соответственно, повышение эффективности выполнения наземным робототехническим комплексом задач МТО в условиях непосредственного огневого соприкосновения с противником.
С целью контроля параметров и условий работы каждого мобильного робота, на базе цифрового вычислителя его контроллера реализован регистратор параметров. В этом случае в энергонезависимую память цифрового вычислителя осуществляется периодическая запись сигналов видеокамеры и других бортовых датчиков мобильного робота. Далее накопленная информация перезаписывается на внешнее устройство энергонезависимое памяти или передается на пост дистанционного управления с использованием системы дистанционной проводной или беспроводной связи для последующего анализа, например, на персональном компьютере.
Для специалистов в данной области техники понятны особенности реализации других альтернативных признаков данного наземного робототехнического комплекса, включаю реализацию его иных вариантов, не приведенных в описании данного изобретения, на основе признаков, изложенных в его формуле.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2018 |
|
RU2701592C1 |
| Система многопараметрического мониторинга района техногенной аварии | 2024 |
|
RU2840313C1 |
| Мультиагентная робототехническая система | 2017 |
|
RU2658684C1 |
| Наземный роботизированный комплекс | 2023 |
|
RU2819223C1 |
| 2_Многофункциональный наземный робототехнический комплекс | 2023 |
|
RU2829371C1 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| Способ наземной и воздушной доставки постановщиков радиопомех с использованием мобильного робототехнического комплекса радиоэлектронной борьбы | 2016 |
|
RU2652914C1 |
| РОБОТИЗИРОВАННЫЙ МОБИЛЬНЫЙ КУРЬЕРСКИЙ КОМПЛЕКС | 2022 |
|
RU2787547C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОГНЕВОЙ ПОДДЕРЖКИ | 2020 |
|
RU2737684C1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2574547C2 |
Изобретение относится к специальной технике, предназначенной для решения задач материально-технического обеспечения подразделений первого эшелона сухопутных войск в условиях ведения боевых действий. Наземный робототехнический комплекс содержит по меньшей мере один мобильный робот, средство его парковки и пост дистанционного управления движением и/или функциональным оборудованием одного мобильного робота. Причем мобильный робот содержит самоходную транспортную платформу с электрическим приводом ее гусениц или колес, контроллер и систему дистанционной проводной и/или беспроводной связи для обмена информацией с постом дистанционного управления и/или со средством парковки, и/или с другим мобильным роботом. Средство парковки мобильного робота выполнено на базе гусеничной или колесной машины с электромеханической трансмиссией. Источник электрической энергии трансмиссии выполнен в виде генератора с приводом от двигателя внутреннего сгорания и/или в виде аккумуляторной батареи и приспособлен для электроснабжения по меньшей мере одного мобильного робота и/или для зарядки его бортового источника питания. Изобретение обеспечивает повышенную эффективность и надежность выполнения задач. 24 з.п. ф-лы, 2 ил.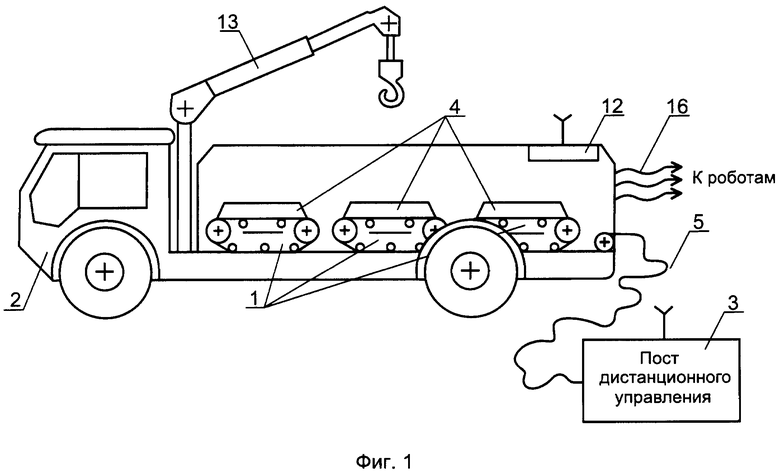
1. Наземный робототехнический комплекс, содержащий по меньшей мере один мобильный робот, средство его парковки и пост дистанционного управления движением и/или функциональным оборудованием по меньшей мере одного мобильного робота, причем упомянутый по меньшей мере один мобильный робот содержит самоходную транспортную платформу с электрическим приводом ее гусениц или колес, контроллер и систему дистанционной проводной и/или беспроводной связи, выполненную с возможностью обмена информацией с указанным постом дистанционного управления, и/или со средством парковки, и/или с другим мобильным роботом, отличающийся тем, что средство парковки по меньшей мере одного мобильного робота выполнено на базе гусеничной или колесной машины с электромеханической трансмиссией, причем источник электрической энергии трансмиссии выполнен в виде генератора с приводом от двигателя внутреннего сгорания и/или в виде аккумуляторной батареи и с возможностью электроснабжения по меньшей мере одного мобильного робота и/или для зарядки его бортового источника питания.
2. Наземный робототехнический комплекс по п. 1, отличающийся тем, что мобильные роботы выполнены с возможностью соединения их электрических цепей питания и передачи электрической энергии от одного мобильного робота к другому.
3. Наземный робототехнический комплекс по п. 1, отличающийся тем, что по меньшей мере один мобильный робот выполнен в виде робота-энергоносителя, выполненного с возможностью передачи электрической энергии от средства парковки мобильных роботов, и/или от поста дистанционного управления, и/или от источника энергии робота-энергоносителя, другому мобильному роботу.
4. Наземный робототехнический комплекс по п. 3, отличающийся тем, что по меньшей мере один мобильный робот содержит аккумуляторную батарею и/или генератор с двигателем внутреннего сгорания, мощность и/или запас энергии которых выбраны из условия обеспечения возможности движения и перемещения на предварительно установленное расстояние не менее двух мобильных роботов.
5. Наземный робототехнический комплекс по любому из пп. 1-4, отличающийся тем, что мобильные роботы оснащены соединителями, выполненными с возможностью объединения их электрических цепей питания и передачи электрической энергии от одного мобильного робота другому мобильному роботу.
6. Наземный робототехнический комплекс по любому из пп. 1-4, отличающийся тем, что система дистанционной проводной связи выполнена с возможностью передачи информационных сигналов по проводам, выполненным с возможностью передачи электрической энергии мобильному роботу.
7. Наземный робототехнический комплекс по п. 1, отличающийся тем, что средство парковки по меньшей мере одного мобильного робота, выполненное на базе гусеничной или колесной машины, является бронированной и/или плавающей машиной повышенной проходимости.
8. Наземный робототехнический комплекс по п. 1, отличающийся тем, что функциональное оборудование по меньшей мере одного мобильного робота выполнено в виде грузовой платформы, и/или грузоподъемного оборудования, и/или устройства погрузки/выгрузки, и/или тягово-сцепного устройства, и/или огнестрельного оружия, и/или гранатомета, и/или огнемета, и/или оборудования для обнаружения и/или обезвреживания взрывоопасных предметов, и/или оборудования для химической и/или радиационной разведки и/или защиты, и/или устройства для постановки дымовой завесы, и/или осветительного оборудования, и/или светового и/или акустического сигнального устройства, и/или оборудования для постановки радиопомех, и/или оборудования для тушения пожара, и/или транслятора радиорелейной системы, и/или оборудования для выполнения земляных работ, и/или оборудования для демонтажа и разрушения строительных конструкций и промышленного оборудования, и/или оборудования для технического обслуживания и/или ремонта других мобильных роботов.
9. Наземный робототехнический комплекс по п. 1, отличающийся тем, что пост дистанционного управления движением и/или функциональным оборудованием мобильных роботов выполнен автономным и приспособлен для дистанционного управления движением и/или оборудованием средства парковки.
10. Наземный робототехнический комплекс по п. 1, отличающийся тем, что средство парковки выполнено на основе крана-манипулятора или содержит средство погрузки/разгрузки, и/или перемещения, и/или развертывания по меньшей мере одного мобильного робота.
11. Наземный робототехнический комплекс по п. 1, отличающийся тем, что по меньшей мере один мобильный робот выполнен с возможностью прокладки электрического кабеля, или трубопровода, или буксирного каната, приспособленного для передачи по нему от средства парковки, соответственно, электрической энергии, топлива или воды, или контейнеров с грузами, или для эвакуации с помощью этого буксирного каната мобильного робота и/или средства парковки.
12. Наземный робототехнический комплекс по п. 11, отличающийся тем, что линия проводной связи мобильного робота со средством парковки имеет разрывное усилие, превышающее вес мобильного робота с его функциональным оборудованием и полезным грузом, и выполнено с возможностью ее использования в качестве буксирного каната.
13. Наземный робототехнический комплекс по п. 1, отличающийся тем, что по меньшей мере один мобильный робот или средство парковки содержит тягово-сцепное устройство, которое выполнено с возможностью дистанционного управления или приспособлено или автоматической сцепки.
14. Наземный робототехнический комплекс по п. 13, отличающийся тем, что тягово-сцепное устройство выполнено электромеханическим, или на основе электропостоянного магнита, или на основе вакуумного захвата.
15. Наземный робототехнический комплекс по п. 1, отличающийся тем, что по меньшей мере один мобильный робот оснащен беспилотным летательным аппаратом винтового типа и имеет проводную линию связи с ним, прочность которой выбрана из условия возможности ее использования в качестве каната для подъема и/или перемещения мобильного робота с его функциональным оборудованием и/или полезным грузом, при этом беспилотный летательный аппарат содержит видеокамеру и выполнен с возможностью передачи визуальной информации об окружающей обстановке на мобильный робот и/или на пост дистанционного управления, и/или беспилотный летательный аппарат содержит антенну системы дистанционной беспроводной связи.
16. Наземный робототехнический комплекс по п. 1, отличающийся тем, что контроллер каждого мобильного робота содержит цифровой вычислитель с энергонезависимой памятью, в которую записана программа управления электрическим приводом гусениц или колес и/или функциональным оборудованием этого мобильного робота в автономном режиме при по меньшей мере временном отсутствии сигналов с поста дистанционного управления, причем указанная программа автономной работы каждого мобильного робота предусматривает возможность достижения предварительно установленного результата работы мобильного робота, или группы мобильных роботов, или их роя.
17. Наземный робототехнический комплекс по п. 1 или 16, отличающийся тем, что контроллер каждого мобильного робота содержит цифровой вычислитель с энергонезависимой памятью и приспособлен для обмена информацией с контроллером по меньшей мере одного другого мобильного робота с использованием систем дистанционной проводной и/или беспроводной связи, и выполнен с возможностью управления электрическим приводом гусениц или колес и/или функциональным оборудованием в режиме синхронного и/или группового управления мобильными роботами, причем порядок обмена информацией между ними, порядок синхронного и/или группового управления и необходимость и/или порядок определения ведущего мобильного робота в их группе или рое предварительно определены и записаны в энергонезависимую память цифрового вычислителя каждого мобильного робота.
18. Наземный робототехнический комплекс по п. 1, отличающийся тем, что контроллер каждого мобильного робота содержит цифровой вычислитель с энергонезависимой памятью, в которую предварительно записан порядок формирования сигналов управления электроприводом гусениц или колес и/или функциональным оборудованием мобильного робота, предусматривающий объединение группы или роя мобильных роботов для совместного достижения результата, информация о котором предварительно записана в энергонезависимую память цифрового вычислителя или передана от поста дистанционного управления с использованием системы дистанционной проводной и/или беспроводной связи, причем указанный порядок формирования сигналов управления установлен из условия обеспечения возможности перемещения, или доставки, или эвакуации, или буксирования группой из двух или более мобильных роботов предметов снабжения, масса или сила сопротивления передвижению которых превышает грузоподъемность или максимально возможное тяговое усилие одного мобильного робота.
19. Наземный робототехнический комплекс по п. 1, отличающийся тем, что контроллер каждого мобильного робота содержит цифровой вычислитель с энергонезависимой памятью и приспособлен для автоматического формирования сигналов управления электроприводом его гусениц или колес из условия автоматического возврата мобильного робота в начальную точку траектории его движения или перемещения к средству парковки мобильных роботов в случае выявления контроллером обстоятельства, предопределяющего невозможность выполнения мобильным роботом программы его работы или достижения предварительно установленного результата этой работы, причем порядок выявления этого обстоятельства предварительно определен и записан в энергонезависимую память цифрового вычислителя контроллера.
20. Наземный робототехнический комплекс по п. 1, отличающийся тем, что мобильный робот содержит бортовые датчики, соединенные с контроллером, в состав которых входят датчики стереовизуальной, и/или лазерной, и/или ультразвуковой, и/или радиолокационной, и/или магнитометрической, и/или курсоодометрической, и/или бесплатформенной инерциальной, и/или глобальной спутниковой навигации, а цифровой вычислитель контроллера приспособлен для обработки их выходных сигналов в режиме реального времени с возможностью определения текущего местоположения мобильного робота, отслеживания окружающей обстановки и выявления препятствий для движения мобильного робота, и формирования сигналов управления электроприводом его гусениц или колес из условия перемещения мобильного робота в заданную конечную точку траектории его движения или в заданном направлении в обход выявленных препятствий.
21. Наземный робототехнический комплекс по п. 1, отличающийся тем, что по меньшей мере один мобильный робот оснащен средством защиты электропривода гусениц или колес, и/или контроллера, и/или системы дистанционной проводной и/или беспроводной связи мобильного робота от воздействия естественных и искусственных электромагнитных помех, и/или средством снижения и/или подавления электромагнитных излучений, создаваемых его электроприводом гусениц или колес, и/или контроллером, и/или системой дистанционной проводной и/или беспроводной связи.
22. Наземный робототехнический комплекс по п. 21, отличающийся тем, что линия проводной связи мобильного робота со средством парковки выполнена экранированной, и/или в виде по меньшей одной витой пары проводов, и/или оснащена фильтрами, приспособленными для защиты мобильного робота от естественных и искусственных электромагнитных помех, и для снижения электромагнитного излучения этой линии.
23. Наземный робототехнический комплекс по п. 1, отличающийся тем, что мобильные роботы, и/или средство парковки, и/или пост дистанционного управления оснащены переговорными устройствами и/или приспособлены для соединения с внешними устройствами и выполнены с возможностью голосовой связи между ними и/или приема/передачи аналоговой и/или цифровой информации с использованием систем дистанционной проводной и/или беспроводной связи.
24. Наземный робототехнический комплекс по п. 1, отличающийся тем, что по меньшей мере один мобильный робот оснащен средством акустической маскировки, выполненным в виде имитатора звука объекта, формируемого из условия возможности введения противника в заблуждение относительно наличия или положения этого объекта, и/или в виде устройства, приспособленного для снижения и/или пассивного или активного подавления акустического шума, создаваемого мобильным роботом при его движении.
25. Наземный робототехнический комплекс по п. 24, отличающийся тем, что устройство активного подавления акустического шума мобильного робота содержит по меньшей мере один возбудитель акустического поля, по меньшей мере один акустический приемник давления и соединенный с ними электронный преобразователь, содержащий усилитель и цифровой сигнальный процессор, выполненный с возможностью обработки выходных сигналов по меньшей мере одного акустического приемника давления и формирования выходных сигналов, поступающих через усилитель по меньшей мере на один возбудитель акустического поля из условия обеспечения минимальной интенсивности результирующего акустического сигнала, создаваемого мобильным роботом и возбудителем акустического поля.
| МНОГОФУНКЦИОНАЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОБЕСПЕЧЕНИЯ БОЕВЫХ ДЕЙСТВИЙ | 2013 |
|
RU2533229C2 |
| БОЕВОЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС | 2013 |
|
RU2538473C2 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2574547C2 |
| БОЕВОЙ РОБОТИЗИРОВАННЫЙ МОБИЛЬНЫЙ КОМПЛЕКС | 2015 |
|
RU2584766C1 |
| US 8058990 B2, 15.11.2011. | |||

