Область техники, к которой относится изобретение
Группа изобретений относится к области медицинского оборудования, а именно к автоматизированному устройству для проведения непрямого массажа сердца пациента и к его опорной конструкции для фиксации устройства на пациенте, которые могут быть использованы в службах скорой медицинской помощи (СМП), в отделениях реанимации и хирургических службах стационарных клиник, в службах МЧС и военной медицине.
Уровень техники
Из уровня техники известны автоматизированные устройства для проведения непрямого массажа сердца путем циклического надавливания (компрессии) на грудную клетку в области нижней трети грудины в случае прекращения сердечной деятельности человека в ходе выполнения мероприятий сердечно-легочной реанимации (СЛР). Известные устройства направлены на повышение эффективности реанимационных мероприятий.
Из уровня техники известно автоматизированное устройство для непрямого массажа сердца (патент № US 4570615, МПК A61H 31/00; публ. 18.02.1986), включающее в себя плунжер и электродвигатель для многократного прямолинейного движения плунжера вниз к грудной клетке пациента и возврата в исходное положение. Для обеспечения безопасности воздействия устройства на грудную клетку пациента на плунжере установлена массажная подушка, содержащая сжимаемый, заполненный жидкостью корпус для снижения ударной нагрузки на грудную клетку пациента.
Недостатком известного устройства является низкие точность и скорость позиционирования пациента под аппаратом, поскольку отсутствует возможность контроля перемещения пациента в нужную точку, для обеспечения контакта нажимного диска с грудной клеткой в рекомендуемой зоне. А также отсутствие качественной декомпрессии при движении нажимного диска вверх, снижающее эффективность проведения СЛР и высокий риск нанесения повреждений пациенту (перелом ребер) во время СЛР.
Известно автоматизированное устройство для непрямого массажа сердца при проведении СЛР (патент № US7841996, МПК A61H31/00, публ. 30.11.2010), в котором с целью повышения эффективности проведения СЛР на плунжере закреплен нажимной диск, на котором установлена полимерная присоска. При движении вниз присоска гасит инерцию движения плунжера, тем самым смягчает воздействие на грудную клетку пациента, не травмируя её. При движении вверх плунжер активно поднимает грудную клетку пациента или, по крайней мере, оказывает некоторую восходящую силу на переднюю стенку грудной клетки, чтобы ускорить расширение грудной клетки между каждым сжатием.
Недостатком известного устройства является отсутствие регулировки начального положения плунжера относительно положения пациента, снижающее эффективность и безопасность реанимационных мероприятий с использованием устройства.
Наиболее близкой по технической сущности к заявляемому является автоматизированное устройство для непрямого массажа сердца при проведении СЛР (патент № US 8690804, МПК A61H 31/00, публ. 08.04.2014), включающее блок непрямого массажа сердца, установленный на опорной конструкции, предназначенной для крепления блока непрямого массажа сердца на пациенте. Блок непрямого массажа сердца содержит размещенные в корпусе, блок управления, электродвигатель, связанный с блоком управления, и механический узел, связанный с электродвигателем через ШВП, включающий выступающий из корпуса плунжер, на котором закреплен нажимной диск с полимерной присоской. Плунжер приводится в движение возвратно-поступательным движением реверсивного электродвигателя через ШВП. При этом для обеспечения точности позиционирования плунжера относительно положения пациента при проведении СЛР устройство снабжено средствами контроля положения плунжера относительно корпуса и относительно ШВП, данные от которых поступают на блок управления.
Устройство достаточно компактное, может переносится в рюкзаке, однако рабочий диапазон антропологических размеров пациентов не очень большой, так как крупные пациенты имеют высоту грудной клетки выше, чем крайнее верхнее положение плунжера аппарата, а маленькие пациенты и дети, наоборот имеют высоту грудной клетки, до которой плунжер не достает или не хватает хода плунжера для обеспечения необходимой глубины компрессий. В результате известное устройство ограничено применением только для взрослых пациентов весом не более порядка 120 кг. Эта проблема частично решается регулировкой корпуса блока непрямого массажа сердца относительно основания опорной конструкции, однако такая конструкция ненадежна и есть риск смещения положения блока относительно опорной конструкции при проведении ЛСР, что небезопасно.
Кроме того, наблюдается отсутствие контроля положения плунжера относительно грудной клетки пациента, а также отсутствие жесткой связи между плунжером и гайкой ШВП при ее движении вверх, поскольку держатель гайки ШВП связан с плунжером компрессионного узла через пружину, что затрудняет декомпрессию при движении плунжера вверх.
Кроме того, существует потенциальная опасность заклинивания плунжера в верхнем положении и вывинчивания в самом нижнем положении, особенно в процессе работы аппарата в процессе эвакуации. Также ограничено время автономной работы аппарата и составляет всего 30-45 минут, что не всегда достаточно для оживления пациента, при этом в процессе СЛР могут возникнуть вынужденные паузы в работе устройства во время замены АКБ, что крайне нежелательно.
Перечисленные недостатки приводят к снижению эффективности проведения непрямого массажа сердца и безопасности для пациента.
Из уровня техники известна опорная конструкция для фиксации пациента к автоматизированному устройству (патент № US 7841996, МПК A61H 31/00, публ. 30.11.2010), выполненная с обхватом грудной клетки пациента в поперечной плоскости грудины. При этом конструкция содержит гибкую ленту, имеющую первый конец, второй конец и средство натяжения, расположенное между первым и вторым концами. Первая и вторая концевые части ремня содержат средства для крепления к устройству. Гибкое лямочное средство имеет установленную натянутую длину, достаточную для охвата шеи пациента. По меньшей мере один из концевых участков присоединен с возможностью разъема.
Недостатком известной конструкции является длительное время развёртывания и ввода в действие автоматизированного устройства из-за отсутствия контроля позиционирования пациента относительно устройства, составляющее драгоценные 5-7 минут, которые могут стать фатальными для пациента.
Из уровня техники известна опорная конструкция по патенту № US 7569021 (МПК A61H 31/00, публ. 04.08.2009), содержащая спинальную доску, предназначенную для размещения за спиной пациента и переднюю часть для размещения вокруг грудной клетки пациента перед сердцем, содержащую две стойки, шарнирно связанные с передней частью с одной стороны и с возможностью съемного прикрепления к спинальной доске - с другой. При этом на передней части установлен блок непрямого массажа сердца, выполненный с возможностью автоматического сжатия или декомпрессии грудной клетки пациента.
Недостатком известной опорной конструкции является длительное время установки на пациенте, неустойчивое размещение блока непрямого массажа сердца на опоре с отсутствием контроля положения плунжера относительно грудной клетки пациента, а также неустойчивое размещение на теле пациента, что сказывается на эффективности и безопасности проведения СЛР, особенно в процессе эвакуации пациента по лестничным пролётам.
Наиболее близкой по технической сущности является опорная конструкция, предназначенная для фиксации пациента к автоматизированному устройству по патенту № US 8690804 (МПК A61H 31/00, публ. 08.04.2014), содержащая спинальную доску, две боковые стойки, выполненные с возможностью съемного прикрепления к спинальной доске, шарнирно связанные с основанием, при этом корпус блока непрямого массажа сердца расположен на основании с возможностью перемещения вдоль оси поступательного движения плунжера с возможностью фиксации. Известная конструкция позволяет регулировать положение блока непрямого массажа сердца под высоту грудной клетки пациента при установке автоматизированного устройства на теле пациента, однако такая регулировка незначительно увеличивает диапазон рабочих высот грудных клеток разных пациентов, кроме того известная опорная конструкция увеличивает риск смещения корпуса блока в процессе проведения СЛР, изменения установленного положения плунжера, что приводит к снижению эффективности и безопасности проведения СЛР. Кроме того, возможны задержки по времени при установке опорной конструкции на теле пациента перед началом работы устройства из-за отсутствия позиционирования съёмного замкового соединения относительно спинальной доски.
Раскрытие сущности изобретения
При создании изобретения решалась задача создания легко транспортируемого автономного аппарата для проведения непрямого массажа сердца при СЛР с электрическим приводом, удовлетворяющего современным требованиям, предъявляемым к аналогичным устройствам, в котором устранены все перечисленные выше недостатки известных аналогов.
Технический результат - повышение эффективности реанимационных мероприятий и безопасности для пациента путем включения дополнительного алгоритма компрессий 15/2 (детский режим), улучшения качества компрессии/декомпрессии, расширения полезной зоны применения аппарата ЛСР без увеличения габаритных размеров.
Указанный технический результат достигается тем, что автоматизированное устройство для проведения непрямого массажа сердца при СЛР включает установленный на опорной конструкции блок непрямого массажа сердца, содержащий размещенные в корпусе блок управления, электродвигатель, связанный посредством драйвера электродвигателя с блоком управления, и механический узел, включающий центральную подвижную часть, коаксиально размещенную в стакане, жестко закрепленном на основании. Центральная подвижная часть содержит гайку ШВП, установленную на валу ШВП, жестко соединенную с держателем, на стержне которого установлен компрессионный узел, включающий нажимной диск с полимерной присоской, закрепленный на плунжере.
При этом, согласно изобретению, нажимной диск компрессионного узла конструктивно выполнен с проксимальной частью в виде стакана, внутри которого расположен плунжер, соединенный с нажимным диском с помощью байонетного соединения. Благодаря данному аспекту появляется возможность увеличить длину компрессионного узла без изменения габаритов устройства, для этого необходимо выдвинуть нажимной диск вниз на высоту проксимальной части нажимного диска, что на практике составляет порядка 4-6 см, и в случае необходимости обеспечить работу аппарата для малых высот грудной клетки (например, для детей или взрослых с плоской грудной клеткой).
При этом, согласно изобретению, держатель гайки ШВП связан с втулкой скольжения посредством двух штифтов, которые вставлены в соответствующие пазы, расположенные в верхней части втулки скольжения. Пазы имеют длину L, обеспечивая перемещение втулки скольжения и держателя гайки ШВП относительно друг друга вдоль их осей симметрии на расстояние М. На втулке скольжения установлен магнит, который воздействует магнитным полем на магнитный датчик, закрепленный на стакане механического узла. Магнитный датчик содержит две чувствительные зоны, расположенные друг от друга на расстоянии М, верхнюю и нижнюю, что позволяет контролировать две точки остановки магнита, закрепленного на втулке скольжения, соответствующие двум возможным положениям нажимного диска. Сигнал от магнитного датчика поступает в блок управления устройства, образуя обратную связь между положением нажимного диска компрессионного узла и блоком управления устройства. При этом в процессор блока управления заложена программа, которая учитывает длину выдвинутого нажимного диска при расчете высоты грудной клетки, а также может активировать дополнительный режим компрессий «15/2» (15 компрессий 2 вдоха) предназначенный для детей.
При этом, согласно изобретению, основание корпуса блока непрямого массажа сердца, жестко связанное с основанием механического узла, является частью опорной конструкции, благодаря чему блок управления четко определяет стартовую позицию механического узла, в которой компрессионный узел находится в верхней точке, что позволяет улучшить качество проводимой компрессии. Кроме того, указанная конструктивная особенность позволяет обеспечить безопасное использование для пациента, поскольку исключает риск смещения плунжера относительно пациента во время проведения СЛР.
Таким образом, в предлагаемом изобретении реализована активация блоком управления дополнительного режима компрессий 15/2 (детский режим) путем удлинения компрессионного узла за счет изменения положения нажимного диска и соответственно расширения рабочего диапазона компрессий, что делает возможным проводить компрессии детям; а также создания обратной связи между положением нажимного диска и блоком управления, за счет изменения положения втулки скольжения с магнитом на фиксированное расстояние и воздействия на магнитный датчик.
Кроме того, согласно изобретению, в конструкции механического узла заявленного устройства исключены пружины. Гайка ШВП, жестко закрепленная в держателе гайки ШВП, связана с дистальной частью плунжера посредством радиального фланца держателя гайки ШВП. Данное решение обеспечило жесткую связь плунжера и гайки ШВП при ее движении вверх, что позволило проводить качественную декомпрессию грудной клетки пациента за счет использования подъемной силы вакуумной полимерной присоски.
Кроме того, согласно изобретению, в конструкции механического узла заявленного устройства взамен пружины установлен силиконовый цилиндр с коническим центральным отверстием, при этом гайка ШВП, закрепленная в держателе гайки ШВП, связана с нажимным диском с полимерной присоской через силиконовый цилиндр с коническим центральным отверстием при ее движении вниз. Предложенное конструктивное решение механического узла позволило перейти от линейной упругости пружины, используемой в прототипе, к нелинейной упругости силиконового цилиндра с коническим центральным отверстием, что дополнительно позволило снизить ударную нагрузку на грудную клетку при компрессии и максимально приблизить работу аппарата к проведению компрессии путем нажатия руками. Предложенная конструктивная особенность обеспечивает повышенную безопасность при использовании для пациента.
Кроме того, согласно изобретению, для расширения полезной зоны применения аппарата ЛСР без увеличения габаритных размеров вал ШВП соединен с ведомым шкивом и корпусом механического узла через опору ведомого шкива и подшипниковую опору, причем ведомый шкив и подшипниковая опора установлены на внешней поверхности опоры ведомого шкива, а ее внутренняя часть конструктивно выполнена с внутренним диаметром больше внешнего диаметра втулки скольжения, дистальной части держателя гайки ШВП и гайки ШВП, что позволяет подниматься гайке ШВП вверх до контакта со стенкой опоры ведомого шкива выше уровня крепления подшипниковой опоры и ведомого шкива. Это дает возможность без изменения габаритов устройства увеличить ход гайки ШВП вверх на высоту ведомого шкива, высоту подшипниковой опоры плюс высоту зазора между ними, что в сумме на практике составляет порядка 2-3 см и тем самым расширить область применения аппарата СЛР для крупных пострадавших с высотой грудной клетки больше на соответственно 2-3 см. При этом позволило исключить необходимость регулировки корпуса блока на основании, что небезопасно для пациента. Дополнительно гайка ШВП соединена с фторопластовым кольцом для предотвращения ее заклинивания в крайнем верхнем положении за счет снижения коэффициента трения между контактирующими поверхностями.
Уплощения, выполненные на внешней поверхности втулки скольжения, препятствуют проворачиванию гайки ШВП, закрепленной в держателе, задавая ей поступательное движение, а также ограничивая ход держателя гайки ШВП в нижней точке его рабочего хода, на длину уплощения до места изменения геометрии внешней поверхности втулки скольжения, защищая тем самым гайку ШВП от вывинчивания.
Кроме того, согласно изобретению, подшипниковая опора состоит из двух подшипников, благодаря чему убран люфт вала в поперечном направлении, что способствует увеличению ресурса механического узла, снижению нагрузки на двигатель, увеличению времени автономной работы блока непрямого массажа сердца.
Кроме того, согласно изобретению, на основании механического узла расположены лазерные целеуказатели, которые светят на грудь пациента, образуя линию, обозначающую центр полимерной присоски. Данное решение позволило сократить время установки аппарата и повысить точность позиционирования аппарата на груди пациента, так как еще до опускания компрессионного узла видно место будущего контакта с пациентом, что исключает потерю времени на повторное прицеливание в случае промаха, повышает эффективность и безопасность проведения СЛР. Кроме того, лазерные целеуказатели упрощают контроль положения аппарата относительно пациента во время компрессий, так как лазерная линия хорошо видна с любого угла обзора. Для включения/выключения лазерных целеуказателей предусмотрена кнопка, размещенная на панели управления и индикации.
Кроме того, согласно изобретению, в конструкции механического узла заявленного устройства применены бесконтактные датчики для отслеживания перемещения нажимного диска с полимерной присоской, а именно:
- на держателе гайки ШВП, соединенным с плунжером, установлен магнит, который воздействует магнитным полем на магнитный датчик, закрепленный на стакане механического узла, и позволяет точно контролировать взаимное положение плунжера и нажимного диска в верхней точке компрессионного узла (перед опусканием на грудную клетку);
- на опоре ведомого шкива, соединенного с валом ШВП установлен оптический энкодер, который позволяет отслеживать количество оборотов вала ШВП в любом направлении и, таким образом, позволяя отслеживать положение компрессионного узла.
Применение бесконтактных датчиков позволило повысить надежность данного узла.
Кроме того, согласно изобретению, на корпусе блока непрямого массажа сердца расположено универсальное крепление, выполненное с возможностью обеспечения крепления различных дополнительных приборов и аппаратов.
Кроме того, согласно изобретению, устройство содержит беспроводной модуль для подключения к внешним беспроводным устройствам.
Указанный технический результат достигается тем, что опорная конструкция автоматизированного устройства для проведения непрямого массажа сердца при СЛР, включающая основание, шарнирно соединенное с двумя боковыми стойками, которые крепятся с помощью замкового соединения к спинальной доске, при этом, согласно изобретению, основание выполнено в виде жестко связанных между собой основания корпуса блока непрямого массажа сердца и основания механического узла, при этом замковое соединение боковых стоек снабжено концевыми датчиками с возможностью отображения состояния замкового соединения на панели управления и индикации, размещенной на корпусе блока непрямого массажа сердца.
Кроме того, согласно изобретению, петли боковых стоек, предназначенные для шарнирного соединения с основанием корпуса блока непрямого массажа сердца, выполнены с прорезями для крепления ремней для дополнительной фиксации устройства на теле пациента.
Кроме того, согласно изобретению, в верхней части каждой боковой стойки расположен механизм фиксации аккумуляторной батареи, в котором установлена аккумуляторная батарея. При этом механизм фиксации аккумуляторной батареи состоит из кармана с шарнирным пазом, пружинных контактов и кнопки для фиксации аккумуляторной батареи. Данная конструкция механизма фиксации аккумуляторной батареи позволяет автоматически высвобождать аккумуляторную батарею при нажатии на кнопку за счет выталкивающей силы пружинных контактов без приложения дополнительного усилия, в результате чего повышается удобство извлечения и снижается время замены аккумуляторных батарей устройства. Дополнительно, конструкция кнопки выполнена таким образом, что она утоплена в корпусе стойки, защищая от непреднамеренного открытия и выпадения аккумуляторной батареи. Вместе с тем возможность использования двух аккумуляторных батарей, расположенных в стойках, увеличивает время автономной работы устройства в два раза. При этом, данное решение дает возможность замены одной из аккумуляторных батарей без прекращения работы устройства, что позволяет избежать остановок работы устройства в процессе компрессий.
При этом, согласно изобретению, в нижней части каждой боковой стойки выполнены прорези, образующие ручки, выполненные с возможностью осуществления вертикального или горизонтального хвата с любой из сторон устройства, что в значительной мере упрощает переноску и перемещение аппарата.
При этом, согласно изобретению, спинальная доска выполнена с антискользящей поверхностью, позволяющей предотвратить смещение устройства в момент транспортировки, в том числе под наклоном.
При этом, согласно изобретению, спинальная доска оснащена улавливателями замкового соединения, которые представляют собой особую взаимную геометрию спинальной доски и боковых стоек в зоне крепления замкового соединения, которая упрощает позиционирование стоек в спинальной доске и обеспечивает гарантированные зазоры «а», позволяющие беспрепятственно фиксировать замки, тем самым сокращая задержку перед началом работы устройства.
При этом, согласно изобретению, замковое соединение оснащено демпфером, исключающим люфт зацепления и снижающим уровень шума при работе аппарата.
Краткое описание чертежей
Изобретения поясняются графическими материалами конкретного примера её осуществления, где на:
фиг. 1 - представлен общий вид автоматизированного устройства;
фиг. 2 - блок непрямого массажа сердца в разрезе (компрессионный узел находится в верхнем начальном положении);
фиг. 3 - блок непрямого массажа сердца в разрезе (компрессионный узел находится в нижнем положении, силиконовый цилиндр с коническим центральным отверстием в сжатом состоянии);
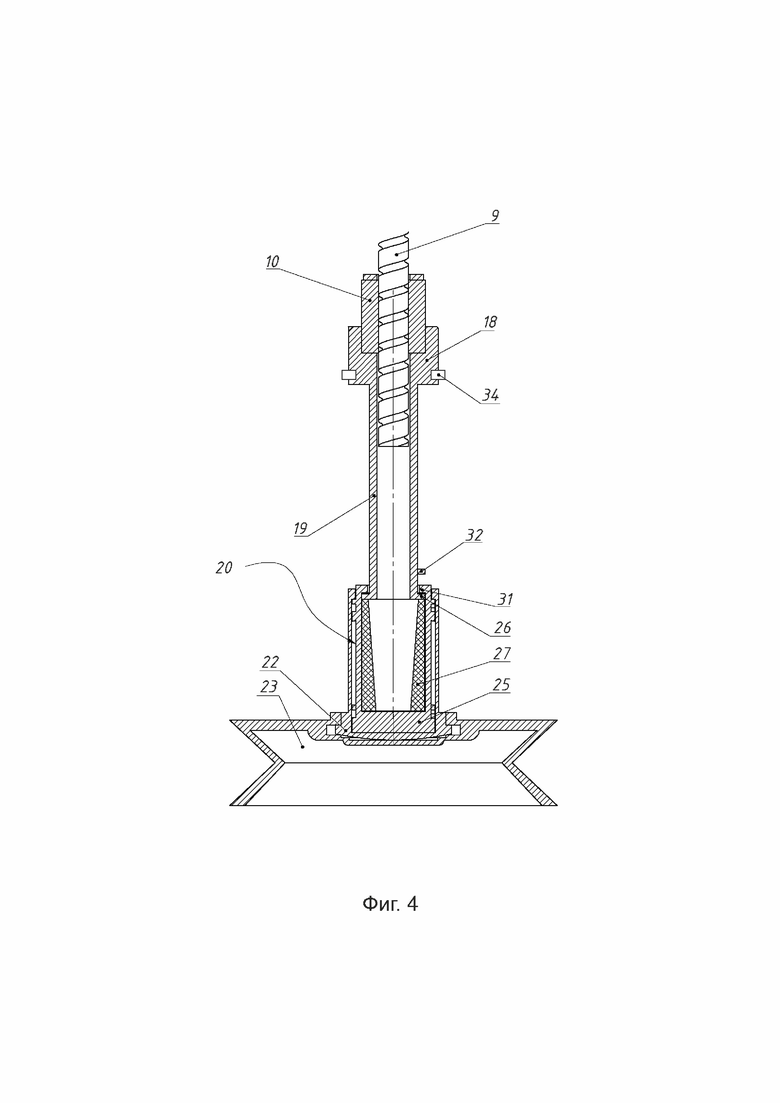
фиг. 4 - центральная подвижная часть блока непрямого массажа сердца;
фиг. 5 - вид А фиг. 2, опора ведомого шкива в разрезе (размещение гайки ШВП);
фиг. 6 - компрессионный узел с нажимным диском в двух положениях;
фиг. 7 - сечение Б-Б фиг. 2, крепление втулки скольжения на держателе гайки ШВП;
фиг. 8 - сечение В-В фиг. 2, фиксация втулки скольжения в стакане механического узла;
фиг. 9 - центральная подвижная часть в выдвинутом положении втулки скольжения;
фиг. 10 - панель управления и индикации;
фиг. 11 - вид корпуса блока непрямого массажа сердца со стороны нажимного диска с присоской (основание корпуса, лазерные целеуказатели);
фиг. 12 - фрагмент боковой стойки опорной конструкции (механизм фиксации аккумуляторной батареи);
фиг. 13 - процесс фиксации аккумуляторной батареи;
фиг. 14 - ручки боковых стоек;
фиг. 15 - спинальная доска;
фиг. 16 - блок непрямого массажа сердца (вид сзади, универсальное крепление);
фиг. 17 - фрагмент боковой стойки опорной конструкции (замковое соединение, улавливатели боковых стоек);
фиг. 18 - замковое соединение (демпферы);
фиг. 19 - разрез центральной части блока для непрямого массажа сердца с иллюстрацией двух положений нажимного диска и втулки скольжения, когда гайка ШВП находится в крайнем верхнем положении.
Позициями на чертежах обозначены:
1 - блок непрямого массажа сердца; 2 - корпус блока непрямого массажа сердца; 3 - опорная конструкция устройства; 4 - стакан механического узла; 5 - основание механического узла; 6 - электродвигатель; 7 - драйвер электродвигателя; 8 - блок управления; 9 - вал ШВП; 10 - гайка ШВП; 11 - держатель электродвигателя; 12 - опора ведомого шкива; 13 - ведомый шкив; 14 - ремень зубчатый; 15 - ведущий шкив; 16 - вал электродвигателя; 17 - подшипниковая опора; 18 - держатель гайки ШВП; 19 - стержень держателя гайки ШВП; 20 - компрессионный узел; 21 - фторопластовое кольцо гайки ШВП; 22 - нажимной диск компрессионного узла; 23 - полимерная присоска нажимного диска; 24 - проксимальная часть нажимного диска; 25 - плунжер; 26 - радиальный фланец на стержне держателя; 27 - силиконовый цилиндр с коническим отверстием; 28 - замковая часть байонетного соединения; 29 - байонетное соединение; 30 - пружинный фиксатор; 31 - дистальная часть плунжера; 32 - ограничитель хода плунжера; 33 - втулка скольжения; 34 - штифт; 35 - уплощения на цилиндрической поверхности втулки скольжения; 36 - дно стакана механического узла; 37 - демпфер втулки скольжения; 38 - оптический энкодер; 39 - датчик температуры; 40 - магнит; 41 - магнитный датчик; 42 - панель управления и индикации; 43 - кнопка включения/выключения устройства; 44 - кнопка установки плунжера на грудную клетку пациента; 45 - кнопка выбора режима непрерывных компрессий; 46 - кнопка выбора режима компрессий 30/2; 47 - кнопка выбора режима компрессий 15/2; 48 - кнопка старт/пауза компрессий; 49 - кнопка включения/выключения беспроводного модуля; 50 - основание корпуса устройства; 51 - петли для соединения основания со стойками опорной рамы; 52 - боковые стойки опорной рамы; 53 - замковое соединение; 54 - спинальная доска; 55 - механизм фиксации аккумуляторной батареи; 56 - аккумуляторная батарея; 57 - шарнирный паз кармана; 58 - пружинные контакты; 59 - кнопка - фиксатор аккумуляторной батареи; 60 - ручки боковых стоек; 61 - концевые датчики; 62 - индикатор уровня заряда аккумуляторной батареи в левой стойке; 63 - индикатор уровня заряда аккумуляторной батареи в правой стойке; 64 - индикатор тревоги; 65 - индикатор подключения к сети; 66 - индикатор закрытия левого замкового соединения; 67 - индикатор закрытия правого замкового соединения; 68 - антискользящая поверхность спинальной доски; 69 - универсальное крепление; 70 - лазерные целеуказатели; 71 - кнопка включения/выключения лазерных целеуказателей; 72 - улавливатели замкового соединения; 73 - демпфер замкового соединения.
Осуществление изобретения
Автоматизированное устройство проведения непрямого массажа сердца при СЛР содержит блок 1 непрямого массажа сердца, размещенный в пластиковом корпусе 2 и установленный на опорной конструкции 3 (фиг. 1), предназначенной для фиксации пациента к блоку 1 непрямого массажа сердца при СЛР.
Блок 1 непрямого массажа сердца (фиг. 2, 3) предназначен для осуществления компрессий на грудную клетку человека и представляет собой механический узел, состоящий из центральной подвижной части, коаксиально размещенной в стакане 4, жестко закрепленном на основании 5, приводимой в действие реверсивным электродвигателем 6, связанным посредством драйвера электродвигателя 7 с блоком управления 8, выполненным с возможностью управления работой устройства и контроля фактического состояния функционально значимых узлов устройства.
Центральная подвижная часть приводится в движение электродвигателем 6 через шарико-винтовую передачу (здесь и далее ШВП), преобразуя вращательное движение вала ШВП 9, создаваемое электродвигателем 6, в поступательное движение гайки ШВП 10, соединенной с центральной подвижной частью. Электродвигатель 6 закреплен на держателе 11, который жестко соединен со стаканом 4 и связан с валом ШВП 9 через опору 12 ведомого шкива, ведомый шкив 13, зубчатый ремень 14 и ведущий шкив 15, установленный на валу 16 электродвигателя 6. При этом опора 12 ведомого шкива 13 закреплена на стакане 4 через подшипниковую опору 17, состоящую из двух подшипников. Использование двух подшипников вместо одного позволяет исключить люфт вала в поперечном направлении, что способствует снижению нагрузки на электродвигатель 6 и увеличению автономной работы устройства. Ведомый шкив 13 и подшипниковая опора 17 закреплены на внешней поверхности опоры 12 ведомого шкива, при этом внутренний диаметр опоры 12 ведомого шкива больше внешнего диаметра втулки скольжения 33, дистальной части держателя 18 гайки ШВП и гайки ШВП 10, что позволяет подниматься гайке ШВП 10 вверх выше уровня крепления подшипниковой опоры 17 и ведомого шкива 13 до контакта со стенкой опоры 12 ведомого шкива. Использование в конструкции устройства опоры 12 ведомого шкива 13 позволило увеличить ход гайки ШВП 10 на 2-3 см без увеличения габаритных размеров устройства, что удобно для переносного устройства и подходит для случаев использования на крупных пациентах с большой высотой грудной клетки.
Центральная подвижная часть блока 1 непрямого массажа сердца включает гайку ШВП 10 (фиг. 4, 5), установленную на валу ШВП 9, жестко соединенную с держателем 18 гайки ШВП, на стержне 19 которого установлен компрессионный узел 20.
На поверхности гайки ШВП 10 со стороны опоры 12 ведомого шкива 13 установлено фторопластовое кольцо 21 (фиг. 5) для снижения трения опоры 12 о гайку ШВП 10 при вращении в верхнем положении компрессионного узла 20. Держатель 18 гайки ШВП 10 имеет сквозное отверстие для свободного прохода вала ШВП 9 (фиг. 4).
Компрессионный узел 20 состоит из нажимного диска 22 с закрепленной на нем полимерной присоской 23 (фиг. 4). Использование подъемной силы вакуумной полимерной присоски 23 обеспечивает качественную декомпрессию при движении нажимного диска 22 вверх. Нажимной диск 22 конструктивно выполнен с проксимальной частью 24 в виде стакана, внутри которого расположен плунжер 25, при этом внутри плунжера 25 размещен упругий элемент с упором в радиальный фланец 26, выполненный на стержне 19 держателя 18 гайки ШВП. С целью обеспечения улучшенной амортизации плунжера 25 в крайнем нижнем положении упругий элемент выполнен в виде силиконового цилиндра 27 с коническим отверстием. Использование нелинейной упругости силиконового цилиндра 27 позволяет снизить ударную нагрузку и исключить тем самым травмирование грудной клетки пациента в процессе СЛР.
На проксимальной части 24 нажимного диска 22 выполнена замковая часть 28 байонетного соединения, при этом на ответной части плунжера 25 расположено само байонетное соединение 29 и пружинный фиксатор 30 (фиг. 6, а), благодаря чему нажимной диск 22 можно выдвигать вниз на высоту его проксимальной части 24 (фиг. 6, б), что на практике составляет порядка 4-6 см.
Таким образом, нажимной диск 22 выполнен с возможностью выдвижения и имеет два положения: верхнее и нижнее, причем регулировка положения нажимного диска 22 осуществляется за счет снятия фиксации пружинного фиксатора 30 байонетного соединения 29, поворотом нажимного диска 22, установкой его в одно из положений и повторной фиксацией. Возможность регулировки положения нажимного диска 22 позволяет расширить диапазон применения автоматизированного устройства, а именно использовать для пациентов с небольшой по высоте грудной клеткой, в том числе детей, начиная с возраста 7-8 лет.
Компрессионный узел 20 закреплен на стержне 19 держателя 18 гайки ШВП с помощью его радиального фланца 26 (фиг. 4), взаимодействующего с дистальной частью 31 плунжера 25, выполненной в виде загнутого внутрь круглого фланца.
Компрессионный узел 20 выполнен с возможностью смещения вверх вдоль стержня 19 держателя 18 гайки ШВП 10 до ограничителя 32 хода плунжера 25 за счет деформации сжатия силиконового цилиндра 27 с коническим центральным отверстием.
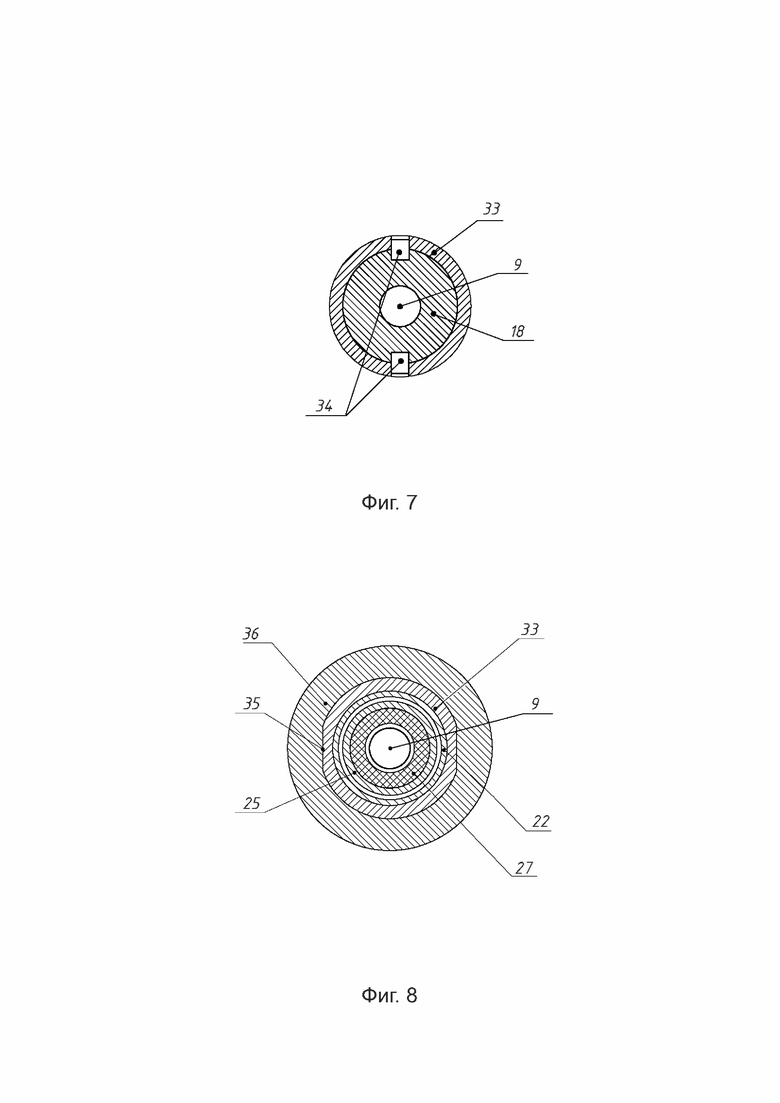
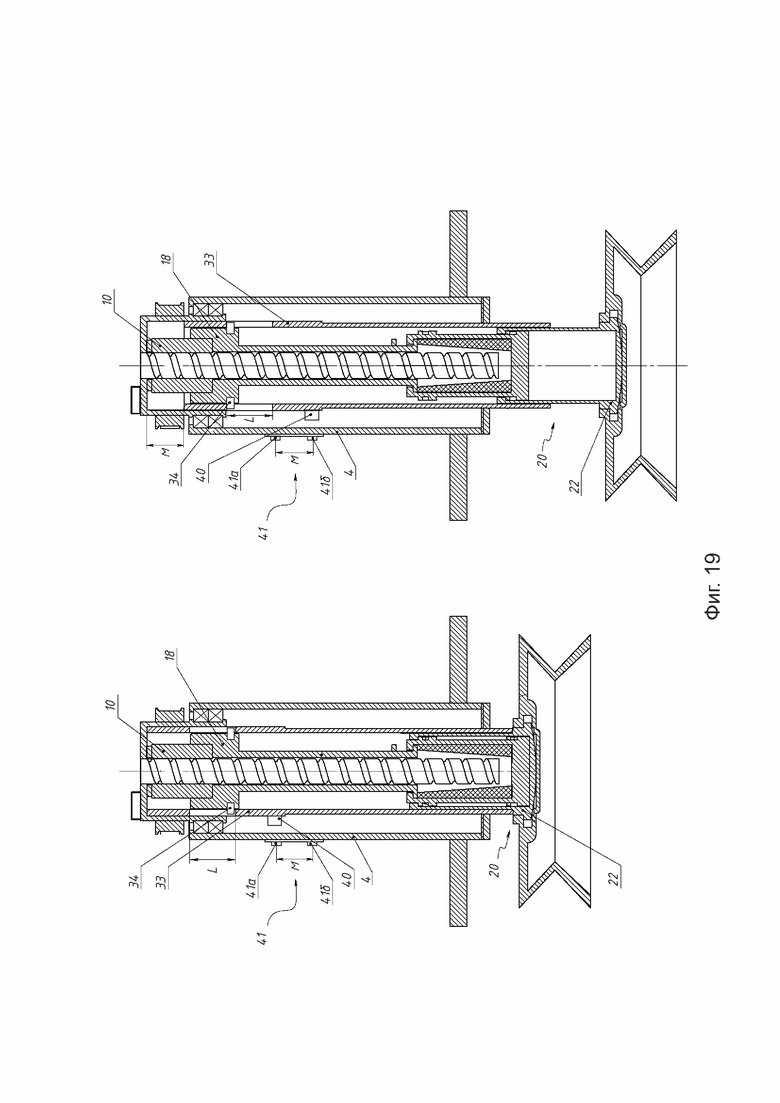
Держатель 18 гайки ШВП 10 связан с внутренней цилиндрической поверхностью втулки скольжения 33 (фиг. 2, 5) с обеспечением возможности их взаимного продольного перемещения и исключением прокручивания относительно друг друга посредством двух штифтов 34, закрепленных на держателе 18 гайки ШВП, которые вставлены в соответствующие пазы, расположенные в верхней части втулки скольжения 33 (фиг. 7). Пазы имеют длину L, обеспечивая перемещение втулки скольжения 33 и держателя 18 гайки ШВП 10 относительно друг друга вдоль их осей симметрии на расстояние М (фиг. 19).
В нижней части внутренняя цилиндрическая поверхность втулки скольжения 33 выполнена с возможностью скольжения по внешней поверхности нажимного диска 22. При этом на внешней цилиндрической поверхности втулки скольжения 33 выполнены уплощения 35, препятствующие проворачиванию втулки скольжения 33 и связанного с ней держателя 18 гайки ШВП относительно стакана 4 механического узла, дно 36 которого выполнено с отверстием, конфигурация которого полностью соответствует внешней поверхности втулки скольжения 33 (фиг. 8). Вместе с тем дно 36 является ограничителем хода втулки скольжения 33 на длину уплощения 35.
Таким образом, контур внешней поверхности в нижней части втулки скольжения 33 в поперечном сечении в местах выполнения уплощений представляет собой окружность со скошенными краями с противоположных сторон и выполнено в соответствии с конфигурацией отверстия дна 36 стакана 4. Взаимная геометрия отверстия дна 36 и внешней поверхности втулки скольжения 33, содержащей уплощения 35, позволяет препятствовать проворачиванию гайки ШВП 10, закрепленной в держателе 18, задавая центральной подвижной части блока 1 непрямого массажа сердца поступательное движение, а также ограничивая ход втулки скольжения 33 в нижней точке на длину уплощений 35 (фиг. 9) до места изменения геометрии внешней поверхности (до окончания уплощения 35) втулки скольжения 33, защищая гайку ШВП 10 от вывинчивания.
Для смягчения контакта втулки скольжения 33 с дном 36 стакана 4 и снижения тем самым шума в работе устройства на внутренней поверхности дна 36 может быть размещен демпфер 37 втулки скольжения 33, выполненный в виде, например, силиконовой прокладки.
Для отслеживания перемещения центральной подвижной части блока 1 непрямого массажа сердца на опоре 12 ведомого шкива 13, соединенного с валом ШВП 9, может быть установлен оптический энкодер 38 (фиг. 2, 3), данные с которого поступают в блок управления 8, позволяя отслеживать количество оборотов вала ШВП 9 в любом направлении, определяя перемещение компрессионного узла 20. Дополнительно количество оборотов вала ШВП 9 и его направление вращения отслеживается датчиками холла, встроенными в электродвигатель 6, данные с которых поступают в драйвер электродвигателя 7, и далее передаются в блок управления 8 для их сравнения с данными от оптического энкодера 38. Таким образом обеспечивается жесткий контроль числа оборотов вала ШВП 9 и, следовательно, динамики выдвижения компрессионного узла 20.
Для контроля температуры электродвигателя 6 на него может быть установлен датчик температуры 39, данные с которого поступают в драйвер электродвигателя 7. Также драйвер электродвигателя 7 отслеживает величину тока протекающего через обмотки электродвигателя 6 для оценки силы, с которой компрессионный узел 20 давит на грудную клетку пациента.
Для отслеживания положения нажимного диска 22 относительно плунжера 25, на внешней поверхности втулки скольжения 33 установлен магнит 40, при этом на стакане 4 установлен магнитный датчик 41. Магнитный датчик 41 содержит две чувствительные зоны, расположенные друг от друга на расстоянии М: верхнюю 41а и нижнюю 41б (фиг. 19). Когда гайка ШВП 10 находится в крайнем верхнем положении (крайнее верхнее положение компрессионного узла 20) (фиг. 19), нажимной диск 22 воздействует на нижний край втулки скольжения 33, и в зависимости от своего положения, поднимает или опускает ее на расстояние М. При этом магнит 40, закрепленный на втулке скольжения 33, также перемещается на расстояние М и может находиться в одной из двух точек, в зависимости от положения нажимного диска 22. Первая точка остановки магнита 40 напротив верхней чувствительной зоны 41а соответствует компрессионному узлу 20 с задвинутым нажимным диском 22 (минимальная длина компрессионного узла 20), вторая точка остановки магнита 40 напротив нижней чувствительной зоны 41б соответствует компрессионному узлу 20 с выдвинутым нажимным диском 22 (максимальная длина компрессионного узла 20).
Сигнал от магнитного датчика 41 поступает в блок управления устройства 8 (фиг. 2, 3), образуя обратную связь между положением нажимного диска 22 компрессионного узла 20 и блоком управления 8, что позволяет учитывать длину выдвинутого нажимного диска 22 при расчете высоты грудной клетки, а также активировать дополнительный режим компрессий «15/2» (15 компрессий 2 вдоха), предназначенный для детей.
Управление и контроль за устройством осуществляется с помощью панели управления и индикации 42, расположенной на лицевой стороне корпуса 2 блока 1 непрямого массажа сердца (фиг. 1).
Для управления устройством предусмотрены (фиг. 10): кнопка 43 включения/выключения устройства, кнопка 44 установки плунжера на грудную клетку пациента, кнопка 45 выбора режима непрерывных компрессий; кнопка 46 выбора режима компрессий 30/2; кнопка 47 выбора режима компрессий 15/2; кнопка 48 старт/пауза компрессий, расположенные на панели управления и индикации 42.
Для подключения к внешним беспроводным устройствам предусмотрен беспроводной модуль, кнопка 49 включения/выключения которого расположена на панели управления и индикации 42.
К пластиковому основанию 50 корпуса 2 (фиг. 1, 11) жестко крепится металлическое основание 5 механического узла блока 1 непрямого массажа сердца. В основании 50 корпуса 2 выполнено отверстие для размещения и свободного выдвижения компрессионного узла 20. Корпус 2 блока 1 непрямого массажа сердца устанавливается на основании 50 с образованием оболочки, полностью закрывающей узлы и детали блока 1 непрямого массажа сердца.
Основание 50 корпуса 2 через петли 51 шарнирно соединено с двумя боковыми стойками 52, которые с помощью замкового соединения 53 крепятся к спинальной доске 54, образуя опорную конструкцию 3, внутри которой располагается пациент, нуждающийся в СЛР. Петли 51 стоек 52 могут иметь прорези для крепления ремней, фиксирующих запястья пациента.
В верхней части каждой стойки 52 (фиг. 1, 12) расположен механизм фиксации аккумуляторной батареи 55, в котором установлена аккумуляторная батарея 56. Две аккумуляторные батареи 56, размещенные на стойках 52 обеспечивают время автономной работы устройства не менее 90 минут, а также это дает возможность замены любой из аккумуляторных батарей 56 во время работы устройства без его остановки.
Каждый механизм фиксации аккумуляторной батареи 55 состоит из кармана с шарнирным пазом 57, пружинных контактов 58 и кнопки 59, фиксирующей аккумуляторную батарею 56 (фиг. 12, 13). Предпочтительно конструкция кнопки 59 выполнена утопленной в корпусе боковой стойки 52 (фиг. 1) для защиты от непреднамеренного открытия и выпадения аккумуляторной батареи 56.
В нижней части каждой боковой стойки 52 имеются прорези (фиг. 1, 14), образующие ручки 60, геометрия которых позволяет осуществлять несколько видов хвата: вертикальный хват и горизонтальный хват с любой из сторон устройства (фиг. 14). Замковое соединение 53 боковых стоек 52 снабжено концевыми датчиками 61 для контроля их закрытия (фиг. 1). При этом для контроля закрытия замкового соединения каждой боковой стойки на панели управления присутствуют индикаторы 66, 67 левого и правого замкового соединения соответственно.
Для контроля уровня заряда аккумуляторной батареи 56 в левой и правой стойках 52, сигналов тревоги и подключения к сети на панели управления и индикации 42 имеются соответствующие индикаторы: 62, 63, 64, 65 (фиг. 1, 10).
Спинальная доска 54 имеет на своем дне антискользящую поверхность 68 (фиг. 1, 15), позволяющую предотвратить смещение устройства в момент транспортировки, в том числе под наклоном.
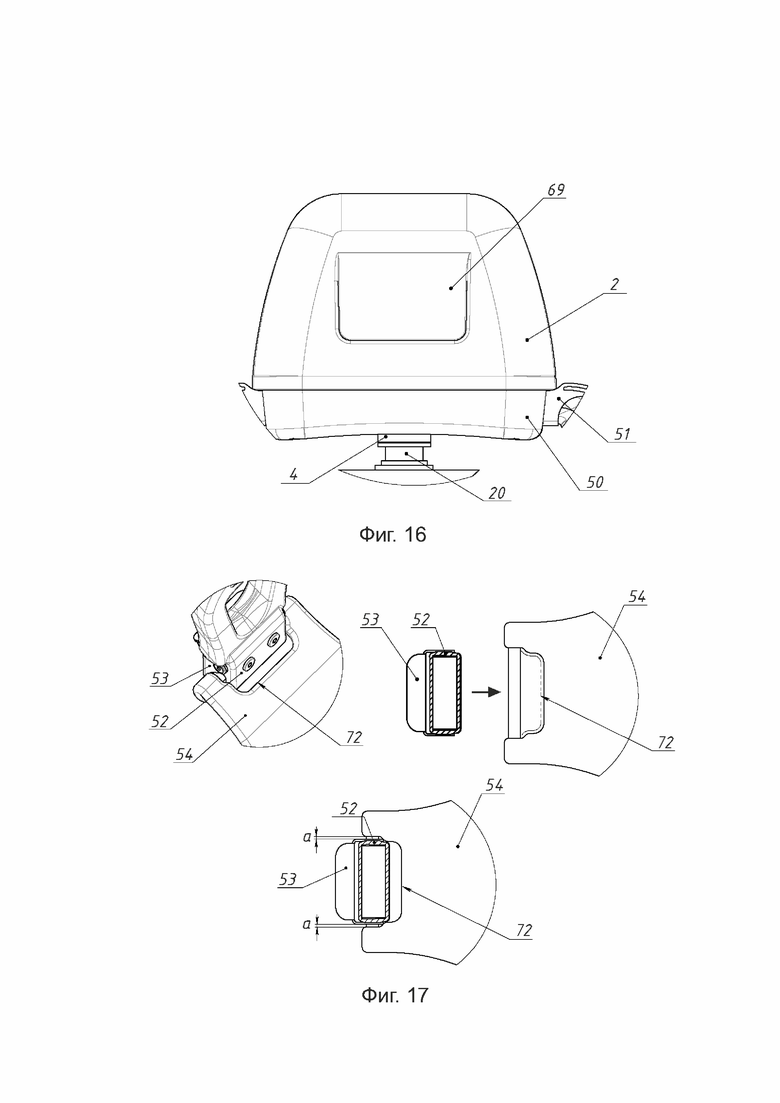
На задней стороне корпуса 2 блока 1 непрямого массажа сердца расположено универсальное крепление 69 (фиг. 16), предназначенное для крепления различных дополнительных приборов и аппаратов, например, аппарата ИВЛ.
Устройство оснащено лазерными целеуказателями 70, обеспечивающими точность позиционирования блока 1 непрямого массажа сердца на груди пациента. Лазерные указатели 70 расположены на основании механического узла 5, справа и слева от полимерной присоски 23 (фиг. 1, 11). Лазерными целеуказателями 70 еще до момента опускания компрессионного узла 20 может быть обозначено место контакта устройства с грудью пациента, что исключает потерю времени на повторное прицеливание в случае промаха. Дополнительно лазерные целеуказатели 70 упрощают контроль положения блока 1 непрямого массажа сердца относительно пациента во время компрессий, так как лазерная линия хорошо видна с любого угла обзора.
Управление работой лазерных целеуказателей 70 осуществляется с помощью кнопки 71 включения/выключения лазерных целеуказателей, размещенной на панели управления и индикации 42 (фиг. 1, 10).
В конструкцию спинальной доски 54 могут быть добавлены улавливатели 71 замкового соединения 53 (фиг. 17), представляющие собой особую взаимную геометрию спинальной доски 54 и боковых стоек 52 в зоне замкового соединения 53, обеспечивающую гарантированные зазоры «а», позволяющие беспрепятственно фиксировать замковое соединение 53. При этом каждое замковое соединение 53, фиксирующее боковые стойки 52 опорной конструкции 3 на спинальной доске 54, может быть оснащено демпфером 73 (фиг. 18), исключающим люфт зацепления и снижающими уровень шума при работе аппарата.
Все автоматы СЛР работают следующим образом: при констатации медицинским персоналом или любым свидетелем остановки кровообращения и отсутствии дыхания пациента или пострадавшего, для предотвращения гибели мозга немедленно производится непрямой массаж сердца, который должен проводиться без остановок до появления признаков жизни.
Для проведения непрямого массажа сердца с использованием автоматизированного устройства, необходимо нажать кнопку включения/выключения 43 (фи. 10) на панели управления и индикации 42 для старта устройства, пока устройство стартует и проводит самодиагностику (2-3 секунды) необходимо подложить под спину пострадавшего спинальную доску 54 (фиг. 1), далее используя ручки 57 боковых стоек 52 взять устройство и установить его над пострадавшим, совместив замковое соединение 53 стоек 52 с улавливателями 72 (фиг. 17) на спинальной доске 54, которые упрощают позиционирование замкового соединения 53. Выравнивая положение, защелкивают с обеих сторон замковое соединение 53 (фиг. 1), контроль успешного закрытия замкового соединения 53 осуществляется с помощью концевых датчиков 61, и отображается на панели управления и индикации 42 с помощью индикаторов закрытия левого 66 и правого 67 замкового соединения 53 (фиг. 10).
Стартовая позиция механического узла перед опусканием толкателя на грудную клетку - нахождение компрессионного узла в верхней точке. Старт устройства сопровождается автоматическим включением лазерных целеуказателей 70 (фиг. 1, 11). Лучи лазерных целеуказателей 70 светят вниз, образуя линию, проходящую через центр полимерной присоски 23. Используя лазерную линию уточняют и, в случае необходимости, осуществляют корректировку позиционирования аппарата на груди пациента перед опусканием компрессионного узла 20. Далее возможны два варианта режима работы устройства в зависимости от одного из двух положений нажимного диска 22: верхнего или нижнего, изменение положения которого осуществляется за счет снятия фиксации пружинного фиксатора 30 (фиг. 6) байонетного соединения 29, поворотом нажимного диска 22, установкой его в одно из положений и повторной фиксацией.
Нажимной диск 22 конструктивно связан с втулкой скольжения 33 (фиг. 8, 9), на которой закреплен магнит 40 (фиг. 2) и в зависимости от верхнего или нижнего положения нажимного диска 22, втулка скольжения 33 также занимает верхнее или нижнее положение, из-за чего магнит 40 воздействует магнитным полем на верхнюю или на нижнюю чувствительную зону магнитного датчика 41. Сигнал от магнитного датчика 41 поступает в блок управления устройства 8, образуя обратную связь между положением нажимного диска 22 компрессионного узла 20 и блоком управления устройства 8, связанного с драйвером электродвигателя 7. На основании сигнала от магнитного датчика 41 о положении нажимного диска 22 блок управления меняет алгоритм работы устройства, поскольку это влияет и на расчет координаты положения толкателя, и на активацию режима 15/2 (когда нажимной диск выдвинут становится активна соответствующая кнопка 15/2).
Режим работы №1: если нажимной диск 22 задвинут, что соответствует минимальной длине компрессионного узла 20, автоматизированное устройство для непрямого массажа сердца при СЛР готово для работы с пациентами, имеющими высокую и среднюю высоту грудной клетки. Для старта компрессий необходимо следовать пошаговому алгоритму работы панели управления и индикации 42 (фиг. 2, 10), исключающему пропуск шагов, что снижает до минимума вероятность ошибки пользователя при работе с устройством. Необходимо нажать кнопку 44 установки плунжера на грудную клетку, в результате чего произойдет автоматическое опускание и остановка компрессионного узла 20 на грудной клетке пациента, далее следует выбрать режим компрессий: «непрерывные компрессии» (кнопка 45) или режим «30/2» - 30 компрессий 2 вдоха (кнопка 46) и нажать кнопку 48 старт/пауза компрессий. В задвинутом положении нажимной диск 22 приподнимает втулку скольжения 33.
Режим работы №2: если нажимной диск 22 выдвинут, что соответствует максимальной длине (на практике дополнительные 4-6 см) компрессионного узла 20, появляется возможность проведения СЛР для малых высот грудной клетки, например, для детей или взрослых с плоской грудной клеткой. Блок управления устройством 8 учитывает длину выдвинутого нажимного диска 22 при расчете высоты грудной клетки, а также активирует дополнительный режим компрессий «15/2» - 15 компрессий 2 вдоха, предназначенный для детей. Если высота грудной клетки не позволяет совершать компрессии глубиной 50 мм, то устройство осуществляет компрессии на глубину 1/3 от высоты грудной клетки, например, для высоты грудной клетки 120 мм глубина компрессий будет составлять 40 мм. В выдвинутом положении нажимной диск 22 не воздействует на втулку скольжения 33, она опускается вниз под собственным весом на расстояние М (фиг. 19).
Штифты 34, расположенные в пазах втулки скольжения 33 (длина пазов L), обеспечивают втулке скольжения 33 продольное перемещение относительно них на длину М и, соответственно, на длину М перемещается магнит 40, закрепленный на втулке скольжения 33. Чувствительные зоны магнитного датчика 41 расположены на расстоянии М друг от друга. Когда гайка ШВП 10 находится в крайней верхней точке (крайнее верхнее положение компрессионного узла 20), в зависимости от положения нажимного диска 22, магнитный датчик 41 посылает сигнал на блок управления 8 с информацией о том, выдвинут или задвинут нажимной диск 22 компрессионного узла 20. На основании полученного сигнала блок управления 8 осуществляет выбор алгоритма работы устройства.
Для старта компрессий необходимо следовать пошаговому алгоритму работы панели управления и индикации 42. Сначала необходимо нажать кнопку 44 установки плунжера на грудную клетку пациента, в результате чего произойдет автоматическое опускание и остановка компрессионного узла 20 на грудной клетке пациента, далее следует выбрать режим компрессий: «непрерывные компрессии» (кнопка 45), режим «30/2» - 30 компрессий 2 вдоха (кнопка 46) или режим «15/2» - 15 компрессий 2 вдоха (кнопка 47) и нажать кнопку 48 старт/пауза компрессий.
Во время компрессий лазерные целеуказатели 70 (фиг. 11) упрощают контроль положения аппарата относительно пациента, так как лазерная линия хорошо видна с любого угла обзора. При необходимости можно выключить лазерные целеуказатели 70 нажав кнопку 71 включения/выключения лазерных целеуказателей 70.
Для постановки устройства на паузу необходимо нажать кнопку 48 старт/пауза компрессий, для продолжения работы устройства повторно нажать кнопку 48 старт/пауза компрессий.
Для прекращения компрессий нажать кнопку 44 установки плунжера на грудную клетку, в результате чего компрессионный узел 20 поднимется в крайнее верхнее положение.
Таким образом, созданное автоматизированное устройство для непрямого массажа сердца и его опорная конструкция способствуют повышению эффективности проведения реанимационных действий и в то же время обеспечивают безопасность для пациента, исключающую травмирование.









Заявленная группа изобретений относится к медицинской технике, а именно к автоматизированному устройству для проведения непрямого массажа сердца пациента и к его опорной конструкции для фиксации устройства на пациенте. Автоматизированное устройство для проведения непрямого массажа сердца при сердечно-легочной реанимации (СЛР) включает установленный на опорной конструкции блок непрямого массажа сердца, содержащий размещенные в корпусе блок управления, электродвигатель, связанный посредством драйвера электродвигателя с блоком управления, и механический узел, включающий центральную подвижную часть, коаксиально размещенную в стакане, жестко закрепленном на основании. Центральная подвижная часть содержит гайку шарико-винтовой передачи (ШВП), установленную на валу ШВП, жестко соединенную с держателем, на стержне которого установлен компрессионный узел, включающий нажимной диск с полимерной присоской, закрепленный на плунжере. Основание корпуса блока непрямого массажа сердца, жестко связанное с основанием механического узла, является частью опорной конструкции. Нажимной диск компрессионного узла выполнен с проксимальной частью в виде стакана, внутри которого расположен плунжер, соединенный с нажимным диском с помощью байонетного соединения с возможностью установки нажимного диска в двух положениях. Держатель гайки ШВП связан с втулкой скольжения посредством двух штифтов, которые вставлены в соответствующие пазы, расположенные в верхней части втулки скольжения с возможностью перемещения втулки скольжения и держателя гайки ШВП относительно друг друга вдоль осей симметрии втулки скольжения и держателя гайки ШВП. На внешней поверхности втулки скольжения установлен магнит. На стакане установлен магнитный датчик, имеющий верхнюю и нижнюю чувствительные зоны, соответствующие двум положениям нажимного диска, и связанный с блоком управления с возможностью считывания и передачи информации о положениях нажимного диска компрессионного узла для изменения блоком управления алгоритма работы устройства. Опорная конструкция автоматизированного устройства для проведения непрямого массажа сердца при СЛР включает основание, шарнирно соединенное с двумя боковыми стойками, которые крепятся с помощью замкового соединения к спинальной доске. Основание выполнено в виде жестко связанных между собой основания корпуса блока непрямого массажа сердца и основания механического узла. Замковое соединение боковых стоек снабжено концевыми датчиками с возможностью отображения состояния замкового соединения на панели управления и индикации, размещенной на корпусе блока непрямого массажа сердца. Техническим результатом является повышение эффективности реанимационных мероприятий и безопасности для пациента путем включения дополнительного алгоритма компрессий 15/2 (детский режим), улучшения качества компрессии/декомпрессии, расширения полезной зоны применения аппарата ЛСР без увеличения габаритных размеров. 2 н. и 19 з.п. ф-лы, 19 ил.
1. Автоматизированное устройство для проведения непрямого массажа сердца при сердечно-легочной реанимации (СЛР), включающее установленный на опорной конструкции блок непрямого массажа сердца, содержащий размещенные в корпусе блок управления, электродвигатель, связанный посредством драйвера электродвигателя с блоком управления, и механический узел, включающий центральную подвижную часть, коаксиально размещенную в стакане, жестко закрепленном на основании, при этом центральная подвижная часть содержит гайку шарико-винтовой передачи (ШВП), установленную на валу ШВП, жестко соединенную с держателем, на стержне которого установлен компрессионный узел, включающий нажимной диск с полимерной присоской, закрепленный на плунжере, отличающееся тем, что основание корпуса блока непрямого массажа сердца, жестко связанное с основанием механического узла, является частью опорной конструкции, при этом нажимной диск компрессионного узла выполнен с проксимальной частью в виде стакана, внутри которого расположен плунжер, соединенный с нажимным диском с помощью байонетного соединения с возможностью установки нажимного диска в двух положениях, при этом держатель гайки ШВП связан с втулкой скольжения посредством двух штифтов, которые вставлены в соответствующие пазы, расположенные в верхней части втулки скольжения с возможностью перемещения втулки скольжения и держателя гайки ШВП относительно друг друга вдоль осей симметрии втулки скольжения и держателя гайки ШВП, при этом на внешней поверхности втулки скольжения установлен магнит, а на стакане установлен магнитный датчик, имеющий верхнюю и нижнюю чувствительные зоны, соответствующие двум положениям нажимного диска, и связанный с блоком управления с возможностью считывания и передачи информации о положениях нажимного диска компрессионного узла для изменения блоком управления алгоритма работы устройства.
2. Автоматизированное устройство по п. 1, отличающееся тем, что компрессионный узел связан с держателем гайки ШВП посредством радиального фланца компрессионного узла, при этом внутри плунжера размещен с упором в радиальный фланец упругий элемент, выполненный в виде силиконового цилиндра с коническим отверстием.
3. Автоматизированное устройство по п. 1, отличающееся тем, что электродвигатель связан с валом ШВП через ведомый шкив, зубчатый ремень и ведущий шкив, установленный на валу электродвигателя, при этом вал ШВП соединен с ведомым шкивом и стаканом механического узла через опору ведомого шкива и подшипниковую опору с обеспечением возможности увеличения хода гайки ШВП вверх до контакта со стенкой опоры ведомого шкива.
4. Автоматизированное устройство по п. 3, отличающееся тем, что ведомый шкив и подшипниковая опора установлены на внешней поверхности опоры ведомого шкива, а внутренняя поверхность опоры ведомого шкива выполнена с внутренним диаметром, который больше внешнего диаметра втулки скольжения, дистальной части держателя гайки ШВП и гайки ШВП.
5. Автоматизированное устройство по п. 3, отличающееся тем, что на опоре ведомого шкива, соединенного с валом ШВП, установлен оптический энкодер, выполненный с возможностью считывания информации о количестве оборотов вала ШВП в любом направлении и передачи информации о количестве оборотов вала ШВП на блок управления.
6. Автоматизированное устройство по п. 3, отличающееся тем, что подшипниковая опора состоит из двух подшипников.
7. Автоматизированное устройство по п. 1, отличающееся тем, что на внешней цилиндрической поверхности втулки скольжения выполнены уплощения, препятствующие проворачиванию втулки скольжения и связанного с втулкой скольжения держателя гайки ШВП относительно стакана механического узла, дно которого выполнено с отверстием, конфигурация которого полностью соответствует конфигурации внешней поверхности втулки скольжения в местах выполнения уплощений и обеспечивает возможность ограничения хода держателя гайки ШВП в нижней точке его рабочего хода, на длину уплощения до места изменения геометрии внешней поверхности втулки скольжения.
8. Автоматизированное устройство по п. 1, отличающееся тем, что на внутренней поверхности дна стакана размещен демпфер втулки скольжения.
9. Автоматизированное устройство по п. 1, отличающееся тем, что на основании механического узла расположены лазерные целеуказатели с возможностью отображения их рабочего состояния на панели управления и индикации, размещенной на корпусе блока непрямого массажа сердца.
10. Автоматизированное устройство по п. 9, отличающееся тем, что содержит кнопку включения/выключения лазерных целеуказателей, размещенную на панели управления и индикации.
11. Автоматизированное устройство по п. 1, отличающееся тем, что на поверхности гайки ШВП установлено фторопластовое кольцо.
12. Автоматизированное устройство по п. 1, отличающееся тем, что на корпусе блока непрямого массажа сердца расположено крепление, выполненное с возможностью обеспечения крепления дополнительных приборов и аппаратов.
13. Автоматизированное устройство по п. 1, отличающееся тем, что содержит беспроводной модуль для подключения к внешним беспроводным устройствам.
14. Опорная конструкция автоматизированного устройства для проведения непрямого массажа сердца при СЛР, включающая основание, шарнирно соединенное с двумя боковыми стойками, которые крепятся с помощью замкового соединения к спинальной доске, отличающаяся тем, что основание выполнено в виде жестко связанных между собой основания корпуса блока непрямого массажа сердца и основания механического узла, при этом замковое соединение боковых стоек снабжено концевыми датчиками с возможностью отображения состояния замкового соединения на панели управления и индикации, размещенной на корпусе блока непрямого массажа сердца.
15. Опорная конструкция по п. 14, отличающаяся тем, что петли боковых стоек, предназначенные для шарнирного соединения с основанием корпуса блока непрямого массажа сердца, выполнены с прорезями для крепления ремней.
16. Опорная конструкция по п. 14, отличающаяся тем, что в верхней части каждой боковой стойки расположен механизм фиксации аккумуляторной батареи, в котором установлена аккумуляторная батарея.
17. Опорная конструкция по п. 16, отличающаяся тем, что механизм фиксации аккумуляторной батареи состоит из кармана с шарнирным пазом, пружинных контактов и кнопки для фиксации аккумуляторной батареи.
18. Опорная конструкция по п. 14, отличающаяся тем, что в нижней части каждой боковой стойки выполнены прорези, образующие ручки, выполненные с возможностью осуществления вертикального или горизонтального хвата.
19. Опорная конструкция по п. 14, отличающаяся тем, что спинальная доска выполнена с нескользящей поверхностью.
20. Опорная конструкция по п. 14, отличающаяся тем, что спинальная доска оснащена улавливателями замкового соединения.
21. Опорная конструкция по п. 14, отличающаяся тем, что замковое соединение оснащено демпфером.
| US 9655809 B2, 23.05.2017 | |||
| US 20210283009 A1, 16.09.2021 | |||
| US 20090062701 A1, 05.03.2009 | |||
| US 20220296464 A1, 22.09.2022 | |||
| US 20170246079 A1, 31.08.2017. |

