Изобретение относится к области управления резервными пунктами, а именно, к системам передачи управления между управляющим и резервными пунктами в случае аварийного выхода из строя управляющего пункта управления (ПУ) и может быть использовано в специальных системах управления, где необходимо обеспечивать непрерывность управления управляемыми объектами.
Существуют специальные системы, в которых управление объектами осуществляется с управляющего объекта, представляющего собой распределенный пункт управления, включающий группировку из N ПУ, каждый из которых способен выполнять задачи по управлению подчиненными объектами. При этом каждый пункт управления группировки имеет заданный приоритет по приему на себя управления объектами. Предполагается, что управление объектами осуществляется в каждый момент времени только с одного ПУ, имеющего наивысший приоритет из всех работоспособных пунктов управления группировки.
Правильная или ошибочная оценка ситуации, связанная с выходом из строя управляющего ПУ, зависит от состава информации контроля и критерия оценки состояния пункта управления по этой информации. Критерием выхода из строя управляющего ПУ будет совпадение «реального» события с одним из заложенных в аппаратуру запасного ПУ первичных событий, при которых принимается решение о выходе из строя управляющего ПУ. При таком подходе критерий выхода из строя управляющего ПУ имеет логическую форму дизъюнкции (решение о наступлении события (выход из строя управляющего ПУ) принимается в том случае, если произошло хотя бы одно первичное событие). Сложность решения данной задачи заключается в том, что сбор всей информации о состоянии основного и запасных ПУ более высокого приоритета должен осуществляться непосредственно на запасных ПУ, однако на практике это мало осуществимо. Реально существует территориальная рассосредоточенность резервных ПУ и сложность оценки информации, начиная от регистрации первичных факторов и заканчивая формированием данных о сложных событиях.
На решение этой задачи направлены предлагаемые способ и устройство для передачи управления между пунктами одного ранга при реализации распределенного командного пункта.
Технический результат предлагаемого способа и устройства для передачи управления между пунктами одного ранга при реализации распределенного командного пункта позволит обеспечить непрерывность управления за счет существенного сокращения процесса передачи управления между пунктами управления одной группировки в случае внезапного выхода из строя основного (управляющего) ПУ.
Существует система стратегического прогноза технического состояния контролируемого объекта [Патент РФ №2326431, G06F 17/00, G06F 11/30]. Данная система относится к средствам мониторинга технического состояния сложных многокомпонентных объектов, в которых техническое состояние контролируемого объекта осуществляется за счет проведения сопоставления его характеристик с характеристиками объектов, аналогичных контролируемому объекту в режиме реального времени. Недостатком описанной выше системы проведения прогноза технического состояния сложных многокомпонентных объектов является то, что она позволяет проводить прогноз состояния сложных многокомпонентных объектов только за счет проведения сопоставления его характеристик с характеристиками объектов. Это не позволяет обеспечить высокую достоверность технического состояния сложных многокомпонентных объектов и соответственно осуществлять передачу управления между управляющими пунктами при реализации распределенного командного пункта.
Известен способ управления отключением неисправных и/или переводимых в резерв объектов системы и система резервирования замещением для его реализации [Патент РФ 2342696, G06F 11/18, H05K 10/00] в интересах построения систем с перестраиваемой структурой, адаптирующихся систем, резервированных систем и автоматического выявления неисправностей в резервированных системах, при фильтрационной обработке результатов измерений. Способ позволяет обеспечить отключение максимального количества неисправных объектов вплоть до ситуации, когда в системе останутся два исправных объекта, путем определения комбинаторной зависимости между номерами объектов системы. Недостаток данного способа - невозможность осуществления передачи управления между управляющими пунктами при реализации распределенного командного пункта.
Наиболее близким по технической сущности к заявляемому способу и устройству для передачи управления между пунктами одного ранга при реализации распределенного командного пункта является способ и комплекс изделий скрытной передачи команд [Патент на изобретение №2782337 H04K 1/06, H04L 9/06, H04L 29/02], который предполагает, что на управляющем объекте генерируется случайная последовательность знаков, которая постоянно передается на управляемые объекты через сеть связи, сокрытие выдачи команд осуществляется за счет обеспечения их незаметного включения в состав и их идентичности по своей стохастической природе последовательности непрерывно передаваемых сигналов.
Недостаток способа и комплекса изделий для скрытной передачи команд заключается в том, что известный способ предназначен для скрытной передачи команд и не позволяет осуществлять передачу управления от внезапно вышедшего из строя основного (управляющего) пункта управления к резервному пункту управления в специальных системах.
Цель изобретения - расширение функциональных возможностей за счет обеспечения передачи управления от внезапно вышедшего из строя основного (управляющего) пункта управления к резервному пункту управления, а также упрощение алгоритма работы аппаратуры на каждом резервном пункте управления для контроля работоспособности более высоких по приоритету пунктов управления в специальных системах.
Поставленная цель достигается тем, что способ и устройство для передачи управления между пунктами одного ранга при реализации распределенного командного пункта предполагает, что критерий выхода из строя основного (управляющего) ПУ основан на контроле выдачи случайной последовательности знаков управляющим ПУ и приема случайной последовательности знаков на резервных ПУ, в случае прекращения выдачи случайной последовательности знаков управляющим ПУ и соответственно приема случайной последовательности знаков на резервных ПУ принимается решение о невозможности управлять объектами управляющим ПУ и управление принимает работоспособный резервный ПУ с наивысшим приоритетом. Для этого на управляющем ПУ генерируется случайная последовательность знаков, которая постоянно передается на управляемые объекты и резервные ПУ через сеть связи, в случае внезапного выхода из строя основного (управляющего) пункта управления генерация и передача случайной последовательности знаков (цифр) прекращается и на резервных пунктах управления, при отсутствии принимаемой случайной последовательности знаков, запускается временной таймер, величина задержки которого определяется исходя из приоритета резервного пункта управления по формуле Ti=Δτ×i, где Ti - величина задержки для i-го резервного пункта управления; i - номер резервного пункта управления (i=1,…,K); K - количество резервных пунктов управления; Δτ - величина защитного временного интервала, при достижении времени min{Ti} i-ый работоспособный резервный пункт управления начинает генерировать случайную последовательность знаков, которая передается на управляемые объекты и резервные пункты управления через сеть связи, при получении на резервных пунктах управления случайной последовательности знаков от работоспособного резервного пункта управления с более высоким приоритетом запущенный таймер останавливается и устанавливается в исходное состояние.
Для приема управления на себя каждый резервный ПУ, в зависимости от установленного приоритета, имеет различную временную задержку, определяемую таймером (чем выше приоритет, тем меньше временная задержка). Это позволяет исключить конфликты между резервными ПУ при приеме управления управляемыми объектами. Таким образом, работоспособный резервный пункт управления с наивысшим приоритетом принимает управление управляемыми объектами, т.к. он имеет наименьшую временную задержку.
Рассмотрим реализацию предлагаемого способа аварийной передачи управления на примере.
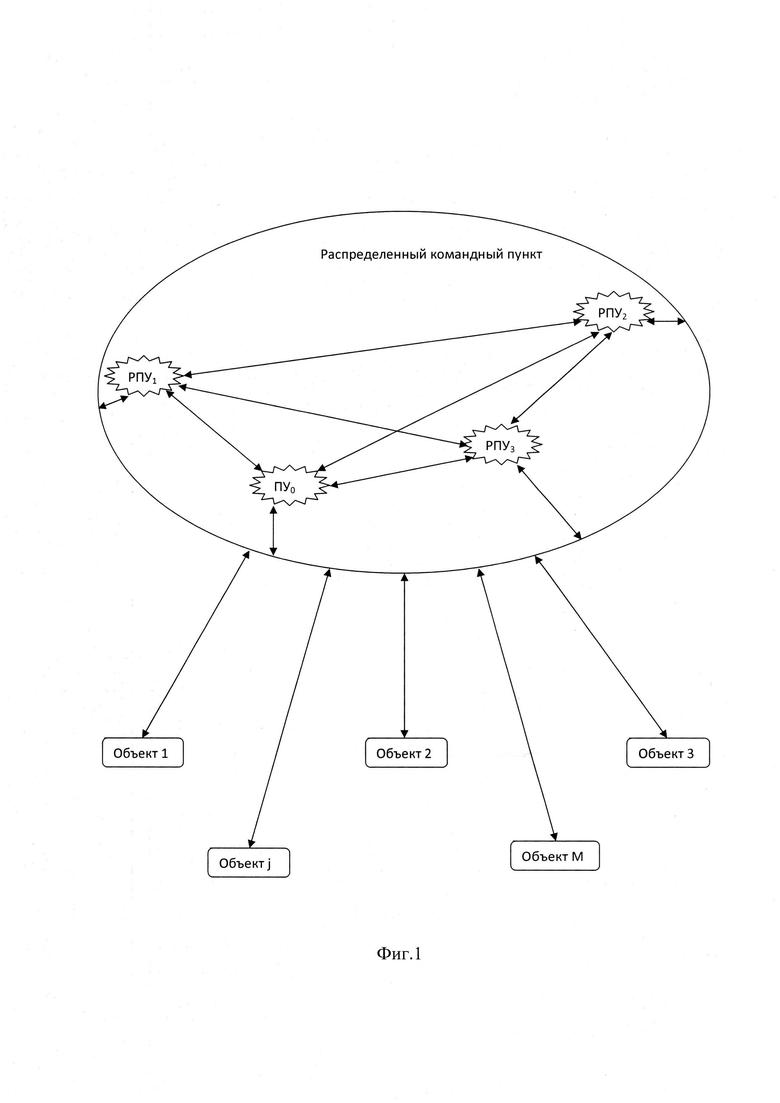
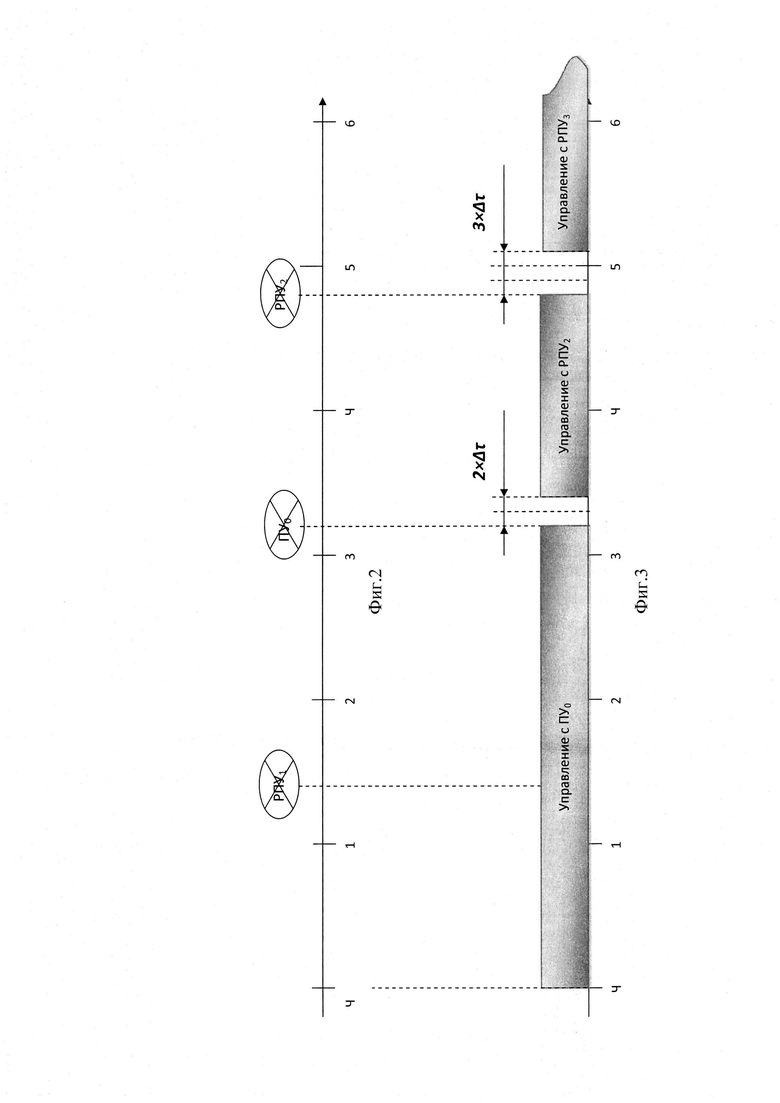
Пусть в состав группировки командного пункта входят: основной пункт управления (ПУ0) и три резервных пункта управления (РПУ1, РПУ2, РПУ3). Предполагается, что каждый пункт управления (основной и любой из резервных) способен управлять М объектами управления (ОУ1 - ОУм) с помощью ограниченного набора команд. Пример данной структуры приведен на рисунке фиг. 1. Пусть динамика выхода из строя пунктов управления следующая: на 2 минуте после времени Ч - выход из строя первого резервного пункта управления РПУ1; на 4 минуте после времени Ч - выход из строя основного пункта управления ПУ0; на 5 минуте после времени Ч - выход из строя второго резервного пункта управления РПУ2. Данная динамика выхода из строя пунктов управления группировки проиллюстрирована на рисунке фиг. 2.
При наступлении времени Ч основной пункт управления ПУ0 начинает генерировать случайную последовательность знаков, которая передается на управляемые объекты и резервные пункты управления через сеть связи, обеспечивая при этом скрытную передачу команд. Скрытная передача команд не является предметом данного изобретения, в связи, с чем описание способа скрытной передачи команд в данном изобретении приведено в конце описания.
Основной пункт управления ПУ0 генерирует случайную последовательность знаков до момента выхода его из строя (4-я минута после времени Ч). После прекращения выдачи случайной последовательности знаков основным пунктом управления ПУ0, в связи с отсутствием приема на резервных работоспособных пунктах управления РПУ2 и РПУ3 (РПУ1 вышел из строя на 2-ой минуте после времени Ч) запускается таймер. Установленное время таймера для РПУ2 - 2×Δτ; для РПУ3 - 3×Δτ. Через время 2×Δτ после прекращения выдачи случайной последовательности знаков основным пунктом управления ПУ0 в связи с его выходом из строя резервный работоспособный пункт управления РПУ2 принимает управление на себя и начинает генерировать и выдавать случайную последовательность знаков с возможностью скрытной выдачи команд. При получении от пункта управления РПУ2 сгенерированной случайной последовательности знаков на третьем резервном пункте управления РПУ3 осуществляются остановка и сброс запушенного таймера после времени 2×Δτ. Управляющим пунктом становится РПУ2 т.к. он из всех работоспособных имеет наивысший приоритет.
При выходе из строя второго пункта управления РПУ2 на 5-ой минуте после времени Ч, через время 3×Δτ третий резервный пункт управления РПУ3 возьмет управления на себя описанным выше способом. Резервный пункт управления РПУ3 начинает генерировать и выдавать случайную последовательность знаков с возможностью скрытной выдачи команд. Динамика работы (генерация и выдача случайной последовательности знаков, с возможностью скрытной выдачи команд) основного и резервных пунктов управления для рассмотренного случая приведена на рисунке фиг. 3.
Таким образом, из описания способа передачи управления между пунктами одного ранга при реализации распределенного командного пункта следует, что обеспечивается быстрая и бесконфликтная передача управления между резервными ПУ, при этом, в случае выхода из строя управляющего пункта, работоспособный резервный пункт управления с наивысшим приоритетом принимает на себя управление объектами. Кроме того, данный способ не требует наличия на каждом ПУ аппаратуры контроля работоспособности всех пунктов управления с более высоким приоритетом.
Устройство для передачи управления между пунктами одного ранга при реализации распределенного командного пункта (фиг. 4), реализующее способ передачи управления между пунктами одного ранга, содержит на каждом резервном пункте управления датчик случайных чисел 1, элемент ИЛИ 2, передатчик 3, первый и второй элементы И 4, 8, задающий генератор 5, триггер 6, счетчик 7 с коэффициентом пересчета N (N длина кодового слова), блок памяти 9, блок выбора команды 10, дешифратор 11, приемное устройство 12, устройство контроля приема случайной последовательности знаков (цифр) 13, таймер 14, второй элемент ИЛИ 15, вход запуска 16. Причем вход запуска 16 подключен к входу второго элемента ИЛИ 15, второй вход которого соединен с выходом таймера, а выход - к входу запуска задающего генератора 5, выход которого соединен с первыми входами первого и второго элементов И 4, 8, ко вторым входам которых подключены соответственно нулевой и единичный выходы триггера 6, выход первого элемента И 4 подключен к управляющему входу датчика случайных чисел 1, выход которого соединен с первым входом элемента ИЛИ 2, второй вход которого соединен с выходом блока памяти 9, а выход - с входом передатчика 3, выход второго элемента И 8 подключен к управляющему входу блока памяти 9 и к входу счетчика 7, выход которого подключен к входу установки в нулевое состояние триггера 6, управляющий выход блока выбора команды 10 соединен с входом установки в единичное состояние триггера 6, а информационные выходы соединены с входами дешифратора 11, выходы которого подключены к входам блока памяти 9, выход приемного устройства 12 подключен к входу устройства контроля приема случайной последовательности знаков (цифр) 13, первый выход которого подключен к входу запуска таймера 14, а второй выход - к входу останова и установки в исходное состояние таймер 14.
Работает устройство следующим образом.
В исходном состоянии триггер 6 находится в нулевом состоянии, в блок памяти 9 записаны кодовые слова, соответствующие передаваемым командам.
На основном пункте управления при подаче импульса на вход 16 задающий генератор 5 вырабатывает с заданной частотой импульсы, которые поступают на первые входы первого и второго элементов И 4, 8. Так как открыт первый элемент И 4 высоким потенциалом с нулевого выхода триггера 6, то с выхода первого элемента И 4 импульсы поступают на управляющий вход датчика случайных чисел 1, и последовательность случайных чисел с выхода датчика случайных чисел 1 поступает через элемент ИЛИ 2 на вход передатчика 3 и передается с управляющего объекта на управляемые объекты и резервные пункты управления. На резервном пункте управления принимаемая приемником 12 последовательность случайных чисел поступает на вход устройства контроля приема случайной последовательности знаков (цифр) 13.
При случайном кратковременном прекращении передачи последовательности случайных чисел основным (управляющим) пунктом управления на каждом резервном пункте управления на вход устройства контроля приема случайной последовательности знаков 13 последовательность случайных чисел не поступает. На каждом резервном пункте управления при прекращении поступления на вход устройства контроля приема случайной последовательности знаков 13 запускается таймер 14. При возобновлении передачи на вход устройства контроля приема случайной последовательности знаков 13 поступает последовательность случайных знаков. Получив от основного пункта управления сгенерированную случайную последовательность знаков, на резервных пунктах управления по сигналу от устройства контроля приема случайной последовательности знаков 13 осуществляются остановка и сброс запушенного таймера 14.
В случае внезапного выхода из строя основного (управляющего) пункта управления передача последовательности случайных чисел от основного (управляющего) пункта управления прекращается и на вход устройства контроля приема случайной последовательности знаков 13 последовательность случайных чисел не поступает. На каждом резервном пункте управления при прекращении поступления на вход устройства контроля приема случайной последовательности знаков 13 запускается таймер 14. Т.к. установленная длительность таймера 14 на всех резервных пунктах управления различная в зависимости от приоритета (чем выше приоритет, тем установка длительности таймера меньше), то на резервном пункте управления с самым высоким приоритетом, из всех работоспособных, сработает таймер 14, который через элемент ИЛИ 15 запустит задающий генератор 5. Задающий генератор 5 вырабатывает с заданной частотой импульсы, которые поступают на первые входы первого и второго элементов И 4, 8. Так как открыт первый элемент И 4 высоким потенциалом с нулевого выхода триггера 6, то с выхода первого элемента И 4 импульсы поступают на управляющий вход датчика случайных чисел 1, и последовательность случайных чисел с выхода датчика случайных чисел 1 поступает через элемент ИЛИ 2 на вход передатчика 3 и передается с резервного пункта управления с самым высоким приоритетом, из всех работоспособных, на управляемые объекты и резервные пункты управления. Резервный пункт управления с самым высоким приоритетом из всех работоспособных автоматически примет управление объектами и сможет осуществлять скрытную выдачу управляющих команд.
Скрытная выдача управляющих команд осуществляется следующим образом.
В исходном состоянии триггер 6 находится в нулевом состоянии, в блок памяти 9 записаны кодовые слова, соответствующие передаваемым командам.
При запуске задающий генератор 5 вырабатывает с заданной частотой импульсы, которые поступают на первые входы первого и второго элементов И 4, 8. Т.к. открыт первый элемент И 4 высоким потенциалом с нулевого выхода триггера 6, то с выхода первого элемента И 4 импульсы поступают на управляющий вход датчика случайных чисел 1, и последовательность случайных чисел с выхода датчика случайных чисел 1 поступает через элемент ИЛИ 2 на вход передатчика 3 и передается с управляющего объекта на управляемые объекты и резервные пункты. На управляемом объекте принимаемая приемником последовательность случайных чисел поступает на вход сдвигающего регистра, а затем сравнивается со значениями кодовых слов, записанных в памяти.
Длина случайной последовательности знаков кодового слова определяется исходя из предельно допустимой вероятности случайного пропуска выданной команды и вероятности случайного формирования команды или трансформации постоянно передаваемой случайной последовательности в ложно сформированную команду на управляемом объекте.
Выбор рациональной длины mp команды (слова из n знаков, представляемых d - разрядным двоичным кодом) осуществляется с учетом соотношения двух вероятностей:
а) вероятности Рпк пропуска команды объектом управления на приемном конце (при выданной команде управляющим объектом);
б) вероятности Рлк получения управляемым объектом ложной команды в результате ее случайного формирования на передающем конце или трансформации случайной последовательности в набор знаков, соответствующих какой-либо команде из заданного набора.
Определение величин Рпк, Рлк и рациональной длины команды шр из возможных значений m=dn производится при следующих допущениях:
1) Выборка слов (команд) из списка N=2m слов сводится к схеме случаев.
2) Вероятность Рвс выборки одного конкретного слова равна
3) Рациональная длина команды должна соответствовать ограничениям на предельно допустимые значения Рпк и Рлк.
4) Вероятность Рпк определяется по формуле

где Рб - вероятность искажения в канале связи одного бита при передаче слов (команд).
Вероятность Рлк определяется по формуле

где m - длина слова из n знаков, представленных d - разрядным кодом;
r - число двоичных разрядов, не совпадающих у команды и конкретного слова из возможных N=2m вариантов слов (команд).
 - число сочетаний из m по r.
- число сочетаний из m по r.
Нормирующее условие

Ограничивающее условие

Соотношение (1) показывает, что величина Рпк возрастает с ростом m.
Соотношение (2) показывает, что величина Рлк убывает с ростом m.
Способ определения величины тр иллюстрируется рисунком (Фиг. 5).
На рисунке (Фиг. 5) обозначены:
 - предельно допустимое значение Рпк;
- предельно допустимое значение Рпк;
 - предельно допустимое значение Рлк;
- предельно допустимое значение Рлк;
mв - верхнее предельно допустимое значение m;
mн - нижнее предельно допустимое значение m.
Величина mp должна соответствовать условию

где mв - верхнее предельно допустимое значение m;
mн - нижнее предельно допустимое значение m.
При необходимости передачи требуемой команды из блока выбора команды 10 с помощью дешифратора 11 осуществляется выбор кодового слова из блока памяти 9, которое соответствует нужной команде. С управляющего выхода блока выбора команды 10 триггер 6 устанавливается в единичное состояние. Первый элемент И 4 закрывается, а второй элемент И 8 открывается. Импульсы с выхода задающего генератора 5 поступают на вход счетчика 7 и управляющий вход блока памяти 9, и нужное кодовое слово с выхода блока 9 поступает через элемент ИЛИ 2 на вход передатчика 3. При поступлении N импульсов с выхода второго элемента И триггер 6 сигналом с выхода счетчика 7 установится в нулевое состояние и на вход передатчика будет поступать последовательность случайных чисел описанным выше образом.
На управляемом объекте принимаемое приемником кодовое слово поступает на вход сдвигающего регистра, значение которого сравнивается со значениями кодовых слов, записанных в памяти. При совпадении принятого кодового слова с кодовым словом, записанным в памяти, на выходе соответствующего блока сравнения появится сигнал совпадения, который поступит в шифратор, на выходе которого будет код переданной команды.
Количество кодовых слов на управляющем объекте соответствует количеству передаваемых команд, количество кодовых слов на управляемом объекте соответствует количеству принимаемых команд, при этом обеспечивается циркулярная, избирательная и циркулярно-избирательная передача команд, для циркулярной передачи кодовое слово, соответствующее передаваемой команде, записывается в память на всех управляемых объектах, для избирательной передачи кодовое слово, соответствующее передаваемой команде, записывается в память только на одном из всех управляемых объектов, для циркулярно-избирательной передачи команды кодовое слово, соответствующее передаваемой команде, записывается в память группы управляемых объектов.
Выдача команды из блока памяти на управляющем объекте и ее передача, а также переключение процесса с выдачи команды на возобновление передачи прикрывающей команду генерируемой случайной последовательности производится без разрыва случайной последовательности или задержки передаваемых знаков.
Из описания работы видно, что происходит бесшовное включение кодового слова в последовательность случайных чисел, что позволяет обеспечить скрытность передачи команды.
В материалах заявки для характеристики предложенного способа передачи управления между пунктами одного ранга при реализации распределенного командного пункта использованы такие признаки, как совокупность действий и порядок выполнения действий во времени.
Сущность изобретения как технического решения выражается в совокупности существенных признаков, достаточной для решения указанной проблемы и получения обеспечиваемого изобретением технического результата.
Приведенные признаки изобретения относятся к существенным, т.к. они влияют на возможность решения указанной технической проблемы и получения технического результата, то есть находятся в причинно-следственной связи с указанным результатом.
Технический результат предлагаемого способа и устройства для передачи управления между пунктами одного ранга при реализации распределенного командного пункта - повышение оперативности передачи управления от внезапно вышедшего из строя основного (управляющего) пункта управления к резервному пункту управления в специальных системах. Кроме того, предлагаемый способ и устройство для передачи управления между пунктами одного ранга при реализации распределенного командного пункта не требует наличия на каждом резервном пункте управления оборудования для контроля работоспособности основного и более высоких по приоритету резервных пунктов управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и комплекс изделий для скрытной передачи команд | 2021 |
|
RU2782337C1 |
| Устройство для передачи командной информации с рассредоточенных пунктов управления | 1990 |
|
SU1795500A1 |
| Устройство контролируемого пункта | 1983 |
|
SU1211784A1 |
| БЕРЕГОВОЙ РАКЕТНЫЙ ПРОТИВОКОРАБЕЛЬНЫЙ КОМПЛЕКС | 2005 |
|
RU2285889C1 |
| Малогабаритная радиостанция передачи команд управления беспилотным летательным аппаратом | 2021 |
|
RU2767605C1 |
| Система управления вооружением летательных аппаратов | 2021 |
|
RU2780716C1 |
| БЕРЕГОВОЙ РАКЕТНЫЙ ПРОТИВОКОРАБЕЛЬНЫЙ КОМПЛЕКС | 2008 |
|
RU2389967C1 |
| Контрольно-проверочный комплекс проверки автопилота | 2016 |
|
RU2615850C1 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА ИНФОРМАЦИИ О СОСТОЯНИИ КОНТРОЛИРУЕМЫХ ПУНКТОВ И ТЕЛЕМЕХАНИЧЕСКАЯ СИСТЕМА "ЛИЛАНА" ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2010338C1 |
| Система телемеханики | 1990 |
|
SU1711216A1 |
Изобретение относится к вычислительной технике. Технический результат заключается в повышении оперативности передачи управления от внезапно вышедшего из строя основного пункта управления к резервному пункту управления в специальных системах. Способ передачи управления между пунктами одного ранга, при реализации распределенного командного пункта, заключается в том, что на управляющем объекте генерируется случайная последовательность знаков, которая постоянно передается на управляемые объекты и резервные пункты управления через сеть связи, при внезапном выходе из строя основного пункта управления генерация и передача случайной последовательности знаков с управляющего пункта прекращается, а на резервных пунктах управления осуществляется контроль приема случайной последовательности знаков с управляющего пункта и в случае отсутствия принимаемой случайной последовательности знаков запускается временной таймер, по истечении времени которого работоспособный резервный пункт управления принимает управление на себя и начинает генерировать случайную последовательность знаков, которая передается на управляемые объекты и резервные пункты управления через сеть связи. 2 н.п. ф-лы, 4 ил.
1. Способ передачи управления между пунктами одного ранга при реализации распределенного командного пункта, заключающийся в том, что на управляющем объекте генерируется случайная последовательность знаков, которая постоянно передается на управляемые объекты и резервные пункты управления через сеть связи, при внезапном выходе из строя основного (управляющего) пункта управления генерация и передача случайной последовательности знаков с управляющего пункта прекращается, а на резервных пунктах управления осуществляется контроль приема случайной последовательности знаков с управляющего пункта и в случае отсутствия принимаемой случайной последовательности знаков, запускается временной таймер, величина задержки которого определяется исходя из приоритета резервного пункта управления по формуле Ti=Δτ×i, где Ti - величина задержки для i-го резервного пункта управления; i - номер резервного пункта управления (i=1, K); K - количество резервных пунктов управления; Δτ - величина защитного временного интервала, при достижении времени min{Ti} i-ый работоспособный резервный пункт управления принимает управление на себя и начинает генерировать случайную последовательность знаков, которая передается на управляемые объекты и резервные пункты управления через сеть связи, получив на резервных пунктах управления случайную последовательность знаков от работоспособного резервного пункта управления с более высоким приоритетом, запущенный таймер останавливается и устанавливается в исходное состояние.
2. Устройство для передачи управления между пунктами одного ранга при реализации распределенного командного пункта, реализующее способ по п. 1, содержащее на управляющем объекте и резервных пунктах управления передающий блок, задающий генератор, первый и второй элементы И, датчик случайных чисел, элемент ИЛИ, триггер, счетчик с заданным коэффициентом пересчета, блок выбора команды, дешифратор, блок памяти, причем вход устройства соединен с входом запуска задающего генератора, выход которого соединен с первыми входами первого и второго элементов И, вторые входы которых соединены соответственно с нулевым и единичным выходами триггера, выход первого элемента И соединен с управляющим входом датчика случайных чисел, выход которого соединен с первым входом элемента ИЛИ, второй вход которого подключен к выходу блока памяти, а выход - к передающему блоку, управляющий выход блока выбора команды соединен с входом установки в единичное состояние триггера, информационные выходы блока выбора команды соединены с входами дешифратора, выходы которого подключены к входам блока памяти, выход второго элемента И соединен с управляющим входом блока памяти и с входом счетчика с заданным коэффициентом пересчета, выход которого подключен к входу установки в нулевое состояние триггера, отличающийся тем, что в устройство введены приемное устройство, устройство контроля приема случайной последовательности знаков, таймер, второй элемент ИЛИ, причем вход запуска подключен к входу второго элемента ИЛИ, второй вход которого соединен с выходом таймера, а выход - к входу запуска задающего генератора, выход приемного устройства подключен к входу устройства контроля приема случайной последовательности знаков, первый выход которого подключен к входу запуска таймера, а второй выход - к входу останова и установки в исходное состояние таймера.
| СПОСОБ ПОСТРОЕНИЯ РАСПРЕДЕЛЕННОГО ПУНКТА УПРАВЛЕНИЯ В УСЛОВИЯХ ВСКРЫТИЯ И ВНЕШНИХ ДЕСТРУКТИВНЫХ ВОЗДЕЙСТВИЙ ЗЛОУМЫШЛЕННИКА | 2018 |
|
RU2676893C1 |
| Способ и комплекс изделий для скрытной передачи команд | 2021 |
|
RU2782337C1 |
| СПОСОБ УПРАВЛЕНИЯ ОТКЛЮЧЕНИЕМ НЕИСПРАВНЫХ И/ИЛИ ПЕРЕВОДИМЫХ В РЕЗЕРВ ОБЪЕКТОВ СИСТЕМЫ И СИСТЕМА РЕЗЕРВИРОВАНИЯ ЗАМЕЩЕНИЕМ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2342696C1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |

