Изобретение относится к технике радиосвязи, а именно к устройствам радиосвязи с высокоскоростными мобильными объектами, в частности для дистанционного контроля полета беспилотных летательных аппаратов (БПЛА) в режиме реального времени.
Известно устройство, защищенное патентом «Способ передачи и приема телеметрической и командной информации в одном диапазоне радиочастот многопоточной радиосистемы и устройство для его осуществления» (патент РФ №2422994, МПК Н04В 7/00, опубл. 27.06.2011, Бюллетень №18).
Известное устройство содержит коммутатор телеметрической информации, входы которого соединены с выходами датчиков, а выход соединен с передатчиком телеметрической информации, бортовую антенну, наземную антенну, блок линейного тракта приемника, последовательно соединенные блок фильтров, блок демодуляторов, регистратор телеметрической информации, последовательно соединенные фильтр-пробка, ключ, выход которого соединен с блоком фильтров; последовательно соединенные формирователь команд командной радиолинии (КРЛ), передатчик сигналов КРЛ, высокочастотный фильтр (ВЧ фильтр), а также приемник сигналов КРЛ, выход которого соединен с дешифратором команд КРЛ, выход 1 которого соединен с входом 1 коммутатора телеметрии (ТЛМ); вход формирователя команд КРЛ соединен с выходом демодулятора блока демодуляторов, выход блока линейного тракта приемника соединен с входом фильтра-пробки и входом 2 ключа, облучатель вертикальной поляризации 1 бортовой антенны соединен с выходом передатчика ТЛМ, а ее излучатель горизонтальной поляризации 2 - со входом приемника сигналов КРЛ; облучатель вертикальной поляризации 1 наземной антенны соединен со входом 1 блока линейного тракта приемника, а ее излучатель горизонтальной поляризации 2-е выходом фильтра, выходы команд дешифратора соединены со входами устройств-исполнителей команд.
Использование данного устройства при проведении испытаний беспилотных летательных аппаратов, когда необходимы передача и прием как телеметрической, так и командной информации, позволяет добиться экономии радиоспектра (в сравнении с применением разделенных систем КРЛ и ТЛМ) и уменьшить количество передающих и принимающих антенн до одной бортовой и одной наземной.
Однако, описанное техническое решение ориентировано на передачу многопоточной телеметрической информации с использованием синхронных радиопотоков на нескольких несущих частотах, и, кроме того, требует разнесения несущих частот КРЛ и ТЛМ, что приводит к увеличению полосы излучаемого радиосигнала. При проведении летных испытаний нескольких (двух и более) беспилотных летательных аппаратов одновременно с контролем параметров полета каждого из них и возможностью избирательной передачи команд на любой беспилотный летательный аппарат, необходимо использование нескольких систем КРЛ и ТЛМ в одном радиочастотном диапазоне, что также приводит к расширению радиоспектра, и, в случае использования многопоточных телеметрических систем с высокой информативностью, требует сложных и дорогих технических решений, а также сложных перестраиваемых широкополосных антенных систем.
Кроме того, широкополосные радиолинии, по сравнению с узкополосными линиями передачи данных, в общем случае, без применения специальных технических и алгоритмических мер, обладают меньшими эффективной помехозащищенностью радиоканала и дальностью действия, что приводит к необходимости повышения мощности передатчика КРЛ для обеспечения надежной трансляции команд управления в условиях реальной помеховой обстановки и при больших дальностях.
Наиболее близкими по технической сущности и достигаемому результату к заявляемому устройству являются способ управления беспилотным летательным аппаратом и устройство для его реализации (патент РФ №2390815, МПК G05D 1/00, опубл. 27.05.2010, Бюллетень №15) в части оборудования стационарного или подвижного пункта управления (оборудование ПУ).
Оборудование ПУ обеспечивает прием из одного или нескольких узкополосных радиоканалов сообщений о положении, координатах и параметрах движения БПЛА, и, в случае необходимости, корректировку пространственного положения БПЛА путем выработки и трансляции в общий радиоканал команд управления.
Известное оборудование ПУ, принятое за прототип, содержит автоматизированное рабочее место пилота-оператора, включающее в себя антенный блок, соединенный с первым входом транспондера, пульт управления вводом и выводом данных и метеостанцию, выходы которых подключены к первому и второму входам формирователя команд управления соответственно, третий вход формирователя команд управления подключен к выходу устройства хранения аэронавигационных данных и пилотажно-навигационных характеристик беспилотного летательного аппарата, к первому и второму входам блока шифрования подключены транспондер и формирователь команд управления соответственно, а первый и второй выходы блока шифрования соединены со вторым входом транспондера и с четвертым входом формирователя команд управления соответственно, вход пульта управления вводом и выводом данных соединен с вторым выходом формирователя команд управления, а выход подключен к входу устройства отображения.
Использование в прототипе общего узкополосного радиоканала с временным разделением позволяет существенно повысить помехозащищенность по сравнению с широкополосными линиями передачи данных.
Однако, применяемый метод трансляции сообщений каждой передающей станцией, участвующей в обмене данными (БПЛА, оборудование ПУ), в заранее заданный высокоточными синхронизированными часами отрезок дискретной шкалы единого времени, имеет недостатки.
Обеспечение привязки высокоточных часов реального времени к общей временной шкале (шкале единого времени UTS) осуществляется приемниками спутниковой навигационной системы каждого участника информационного обмена. Известно, что современные средства радиоэлектронной борьбы имеют возможность постановки пространственной радиопомехи любой интенсивности и структуры. Эффективность помехи тем выше, чем выше степень раскрытия характеристик полезного сигнала: частоты, протокола обмена, вида модуляции и других. Таким образом, постановка прицельной помехи, направленной на хорошо известные основные навигационные системы (ГЛОНАСС, NAVSTAR) технически реализуема с достаточной степенью эффективности. При этом произойдет рассинхронизация часов реального времени одного или нескольких участников обмена (БПЛА, оборудование ПУ) с невозможностью дальнейшей поддержки информационного взаимодействия в общем радиоканале с временным разделением слотов вещания.
Также, учитывая, что каждому участнику радиообмена выделяется только по одному информационному слоту в секунду, время трансляции команды (особенно в случаях передачи макрокоманд управления) может достигать нескольких секунд из-за необходимости задействования двух или более последовательных информационных слотов.
Для исключения перечисленных недостатков в прототипе предусмотрено использование, при необходимости, дополнительного радиоканала, что не всегда возможно из-за ряда технических и организационных ограничений (допустимой сетки несущих частот, разрешенной полосы радиосигнала, экономической целесообразности при построении системы управления и иных).
Решение одной из основных задач проведения летных испытаний, а именно, обеспечение безопасности, требует постоянного контроля нахождения беспилотного летательного аппарата в разрешенной зоне в режиме реального времени, и, при необходимости, передачи на беспилотный летательный аппарат команд корректировки положения от аппаратуры дистанционного контроля и управления. При этом критичным является время реагирования системы на недопустимый маневр БПЛА.
Для оперативного реагирования в прототипе предусматриваются макрокоманды управления, которые содержат код каждого из заранее определенных маневров в горизонтальной и вертикальных плоскостях. Макрокоманды формируются на автоматизированном рабочем месте в ПУ оператором с помощью клавиатуры или других устройств ввода данных.
Время реагирования системы на недопустимый маневр определяется, главным образом, временем обнаружения отклонения и реакции на него оператором, а также временем формирования оператором макрокоманды.
При этом не исключается возможность ошибки оператора при формировании макрокоманды на АРМе, особенно при условии размещения ПУ на наиболее часто используемых для обеспечения испытаний мобильных объектах (самолет, вертолет), когда оператор с большой вероятностью может подвергаться характерным вибрационным и перегрузочным воздействиям.
Значительная протяженность воздушных трасс при испытании БПЛА и физические ограничения дальности распространения радиосигналов приводят к необходимости размещения вдоль маршрута движения БПЛА нескольких пунктов управления для надежного радиопокрытия всей траектории движения. Также, в целях обеспечения безопасности, летные испытания БПЛА зачастую проводятся на территориях, удаленных от объектов инфраструктуры, а, следовательно, необходима доставка аппаратуры пунктов управления в зону проведения испытаний. Совокупность вышеуказанных причин актуализирует необходимость уменьшения габаритов аппаратуры пунктов управления.
Техническая задача, на решение которой направлено заявляемое изобретение, заключается в расширении функциональных возможностей устройства при обеспечении надежности передачи команд управления, повышении уровня безопасности проведения летных испытаний БПЛА, а также уменьшении габаритов оборудования.
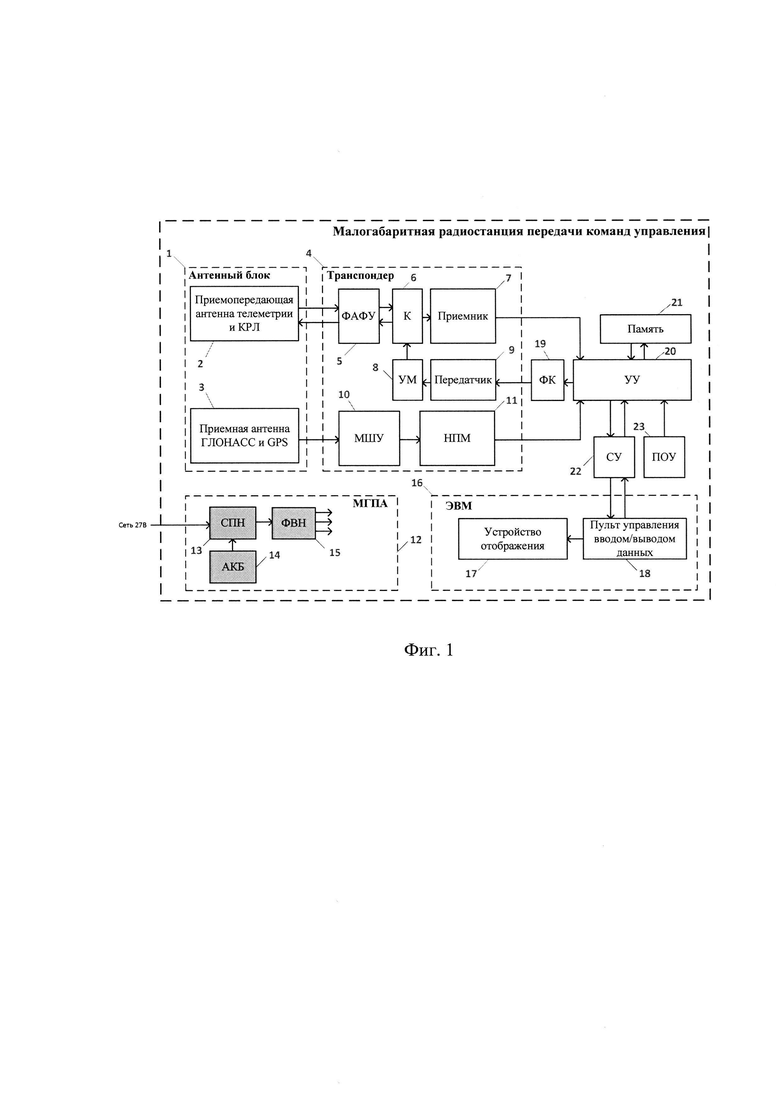
Указанный технический результат достигается тем, что в малогабаритную радиостанцию передачи команд управления беспилотным летательным аппаратом, функциональная схема которой приведена на фиг. 1, дополнительно к антенному блоку (1), состоящему из приемопередающей антенны телеметрии и командной радиолинии (2) и приемной антенны сигналов навигационных спутниковых систем ГЛОНАСС и GPS (3), первый и второй выходы которого соединены с первым и вторым входом транспондера (4) соответственно, а вход подключен к первому выходу транспондера, включающего в себя фидер антенно-фидерного устройства (5), коммутатор высокочастотных сигналов (6), приемник навигационных координат беспилотного летательного аппарата и квитанций выполнения команд (7), передатчик команд управления (9), усилитель мощности высокочастотного сигнала (8), малошумящий усилитель высокочастотных сигналов навигационных спутниковых систем (10) и навигационный приемный модуль
(11), формирователю команд (19), выход которого соединен с третьим входом транспондера, устройству хранения данных (21), пульту управления вводом и выводом данных (18), первый выход которого подключен к устройству отображения (17), введены модуль гарантированного питания аппаратуры
(12), содержащий стабилизатор и преобразователь напряжения (13), аккумуляторную батарею (14) и формирователь выходных напряжений (15); устройство управления (20), первый выход и первый вход которого соединены с первым входом и первым выходом согласующего устройства (22) соответственно, ко второму входу устройства управления подключен выход пульта оперативного управления (23); при этом в формирователь команд введен специальный алгоритм шифрования и преобразования передаваемых команд управления.
Поступающие с БПЛА на антенный блок (1) радиосигналы, содержащие навигационные координаты беспилотного летательного аппарата и квитанции выполнения команд, принимаются антенной (2). Далее, через фидер антенно-фидерного устройства (5) и коммутатор (6), сигналы транслируются на приемник (7), где демодулируются. Демодулированный низкочастотный сигнал подается на устройство управления (20), где производится обработка принятой информации и из информационного потока выделяются адрес БПЛА, сформировавшего текущее сообщение, навигационные координаты и состояние квитанций ранее переданных команд, а также проверяется достоверность полученной информации.
При проведениях летных испытаний основное управление полетом БПЛА осуществляется бортовой автономной системой. Коррекция параметров движения оператором малогабаритной радиостанции передачи команд управления необходима только тогда, когда обнаружено опасное отклонение от программной траектории. Таким образом, основным режимом работы заявляемого изобретения является режим приема данных от БПЛА. При этом вход приемника через коммутатор высокочастотных сигналов и фидер антенно-фидерного устройства подключен к выходу приемопередающей антенны телеметрии и КРЛ, а передатчик команд управления (9) и усилитель мощности высокочастотного сигнала (8) выключены.
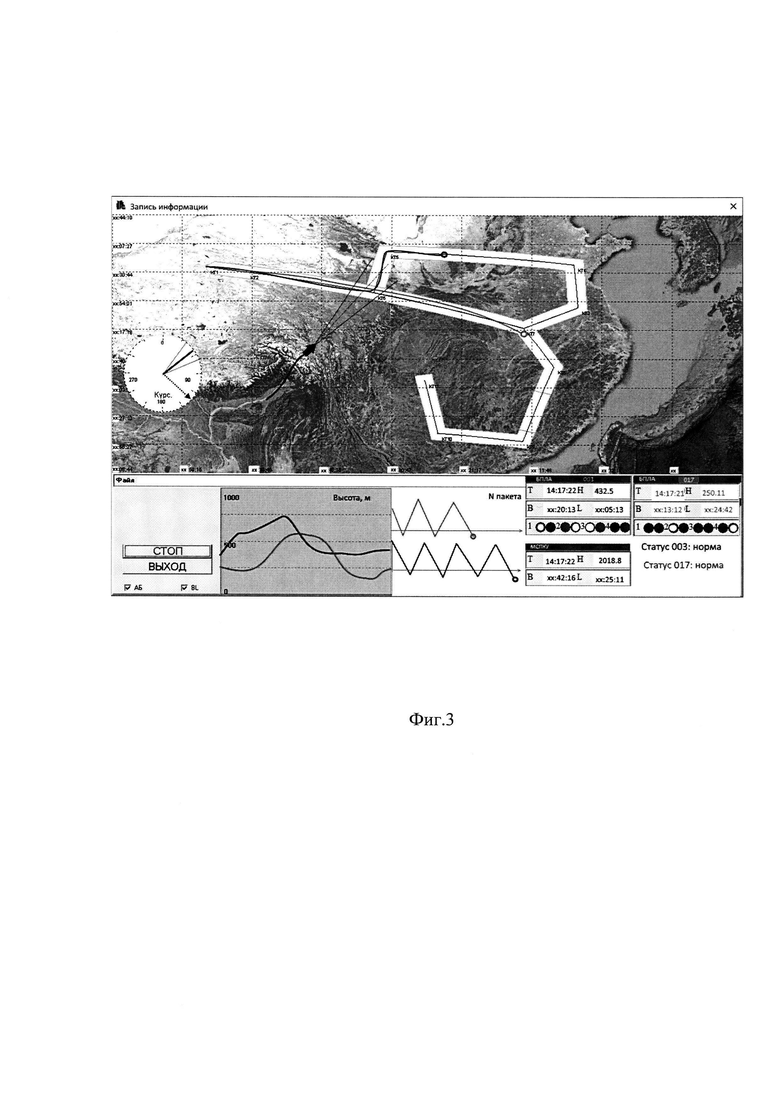
Устройство управления, исключив недостоверные данные по признакам корректности (контрольные маркеры, контрольные суммы, нахождение адреса БПЛА в допустимом диапазоне таблицы адресов), производит запись полученной информации на устройство хранения данных (21). Одновременно устройство управления через согласующее устройство (22) осуществляет выдачу принятого от БПЛА сообщения на пульт управления вводом и выводом данных (18), и значимая для оператора информация индицируется на устройстве отображения (17). Возможный вариант представления информации на экране устройства отображения приведен на фиг. 3.
В современных реалиях роль пульта управления вводом и выводом данных и устройства отображения наиболее часто выполняет ПЭВМ (ноутбук). Для обеспечения совместимости заявляемого устройства с различными ПЭВМ, работающими под управлением любой из существующих операционных систем и использующих любой из стандартных интерфейсов обмена данными, введено согласующее устройство, обеспечивающее прямое и обратное преобразование данных на канальном и физическом уровнях семиуровневой модели OSI.
Для пространственного позиционирования мобильного объекта с размещенной на нем малогабаритной радиостанцией передачи команд управления беспилотным летательным аппаратом (мобильный командно-измерительный пункт) сигналы спутниковых навигационных систем ГЛОНАСС и GPS, принимаемые приемной антенной ГЛОНАСС и GPS (3) антенного блока поступают на малошумящий усилитель (10), где полезная составляющая сигналов фильтруется от помех и усиливается. Отфильтрованный и усиленный высокочастотный сигнал поступает на навигационный приемный модуль (11), где на основании принятых данных производится вычисление навигационных координат мобильного командно-измерительного пункта. Вычисленные координаты поступают на устройство управления, которое, через согласующее устройство и пульт управления вводом и выводом данных, транслирует их в устройство отображения. Одновременно устройство управления производит запись вычисленных координат мобильного командно-измерительного пункта в устройство хранения данных.
Информация о расположении мобильного командно-измерительного пункта относительно сопровождаемых БПЛА обеспечивает контроль его нахождения вне опасных зон (разрешенных траекторий движения БПЛА), а также позволяет оптимально позиционировать приемопередающую антенну телеметрии и КРЛ для достижения устойчивой радиосвязи дуплексного канала «мобильный командно-измерительный пункт - БПЛА».
Представленная на устройстве отображения информация позволяет оператору в реальном времени контролировать отклонения траектории движения от программной для всех БПЛА, участвующих в летных испытаниях. В случае, когда указанные отклонения превышают допустимые, оператор при помощи пульта управления вводом и выводом данных формирует команды коррекции, через согласующее устройство поступающие в устройство управления и, далее, на формирователь команд (19).
Формирователь команд по специальному алгоритму, учитывающему адрес получателя (адрес БПЛА, траектория движения которого корректируется) и идентификатор команды, формирует пакет данных и транслирует его на передатчик (9), где осуществляется перенос сигнала в область высоких частот. Высокочастотный сигнал поступает на усилитель мощности (8), фильтруется от внеполосных составляющих и усиливается до требуемого уровня.
Устройство управления, получив команду коррекции траектории, одновременно с трансляцией ее на формирователь команд, включает передатчик команд управления и усилитель мощности, выключает приемник навигационных координат беспилотного летательного аппарата и квитанций выполнения команд, а также, через фидер антенно-фидерного устройства и коммутатор высокочастотных сигналов, подключает выход передатчика к входу приемопередающей антенны телеметрии и КРЛ. Таким образом, команда коррекции, сформированная оператором в пульте управления вводом и выводом данных, последовательно пройдя ряд преобразований в согласующем устройстве, устройстве управления, формирователе команд, в который введен специальный алгоритм шифрования и преобразования передаваемых команд управления, передатчик, усилитель мощности, коммутатор и фидер антенно-фидерного устройства, излучается приемопередающей антенной телеметрии и КРЛ в радиоканал.
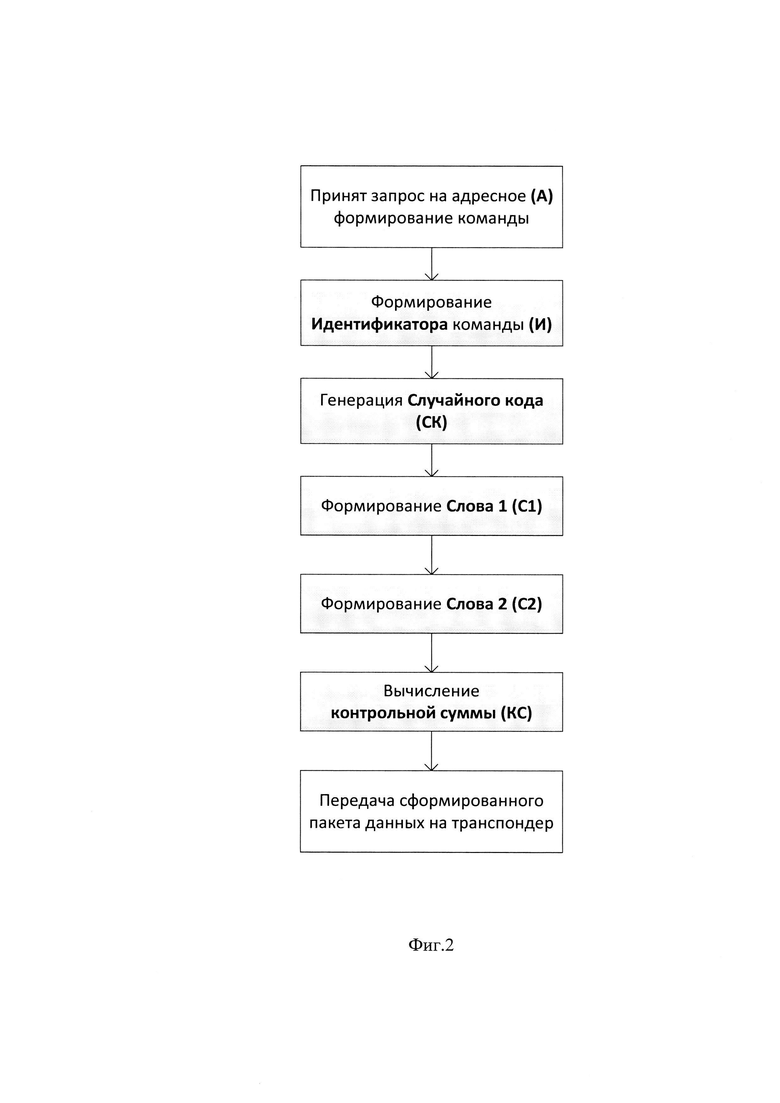
Алгоритм шифрования и преобразования передаваемых команд управления приведен на фиг. 2.
Формируемые команды управления состоят из последовательно переданных уникального идентификатора команды (И), произвольного случайного кода (СК), значения, хранящегося в ячейке персональной кодовой таблицы с адресом «Случайный код плюс индивидуальный номер (адрес) конкретного БПЛА» (С1), значения, хранящегося в ячейке персональной кодовой таблицы с адресом «Случайный код плюс удвоенный индивидуальный номер (адрес) конкретного БПЛА» (С2) и контрольной суммы. Алгоритм учитывает индивидуальный адрес конкретного БПЛА, а также использует персональную кодовую таблицу, что обеспечивает уникальность каждой команды для каждого БПЛА и исключает несанкционированный прием и исполнение команд, даже без использования дополнительных специализированных устройств шифрования, при их записи системами радиоэлектронной борьбы с дальнейшим воспроизведением в радиоканал.
В ходе проведения летных испытаний не исключено возникновение ситуаций, требующих максимально оперативной коррекции траектории движения (например, ситуация выхода из разрешенной безопасной зоны в следствии некорректной работы систем испытываемых БПЛА).
Для повышения скорости реагирования в заявляемое устройство введен пульт оперативного управления (23). Так как в подавляющем большинстве случаев, нештатная работа систем испытываемого БПЛА по соображениям безопасности требует незамедлительного прекращения его полета с целью оценки причин некорректного функционирования для дальнейшей оптимизации систем и узлов, набор команд, необходимых к выполнению в таких ситуациях, конечен и заранее определен (например, закладка рулей в положение «снижение» и выключение двигателя). Наборы команд оперативного исполнения для каждого БПЛА заранее программируются в пульт оперативного управления, и выполняются по нажатию одной кнопки управления, снижая вероятность возможной ошибки оператора при формировании макрокоманд на пульте управления вводом и выводом данных. Также, пульт оперативного управления подключен непосредственно к устройству управления и не зависит от других узлов. Таким образом, даже аппаратные или программные сбои (в частности, в результате вибрационных и перегрузочных воздействий) наиболее уязвимой части оборудования, а именно, пульта управления вводом и выводом данных и устройства отображения (в роли которых обычно используются ПЭВМ), не блокируют оператору возможности командного воздействия на БПЛА.
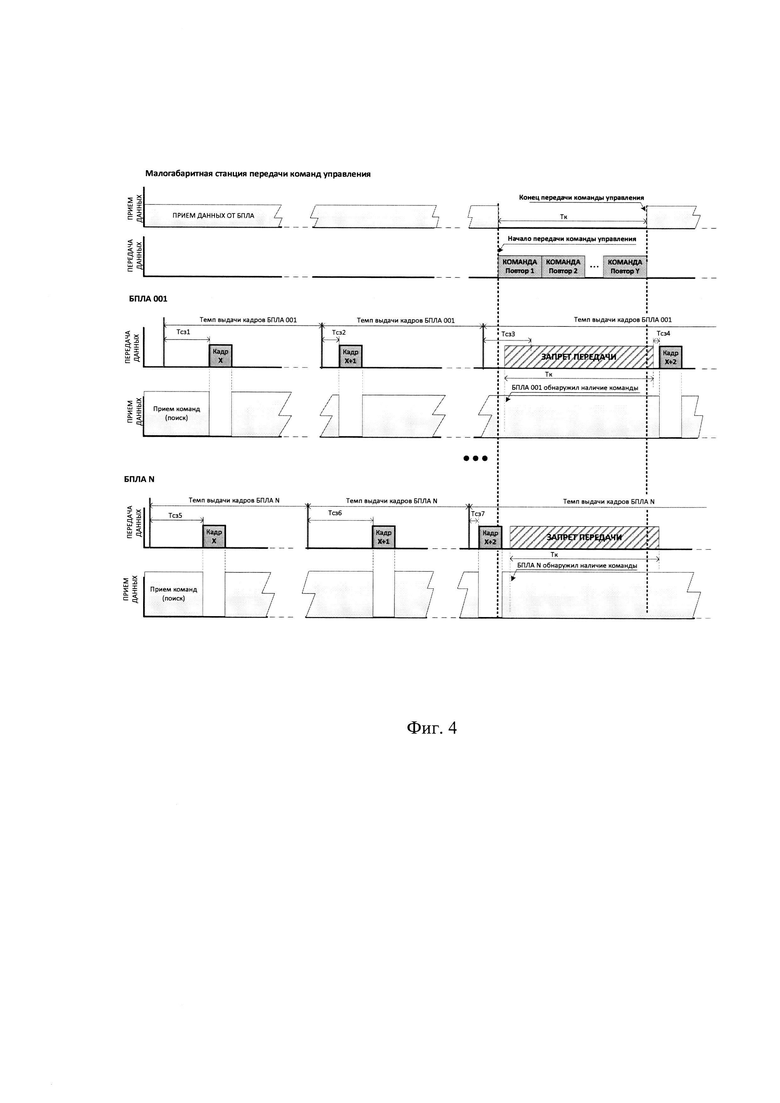
Циклограмма работы малогабаритной радиостанции передачи команд управления в режимах приема данных и передачи команд управления приведена на фиг.4.
Все БПЛА (количество участвующих в обмене данными БПЛА определяется текущими задачами летных испытаний) производят периодическую выдачу в общий узкополосный радиоканал информации о своих навигационных координатах, квитанций ранее переданных команд, статуса состояния и других необходимых данных. Темп выдачи сообщений каждого БПЛА настраивается индивидуально исходя из характеристик конкретного БПЛА (например, у высокоманевренных или низколетящих БПЛА темп выдачи информации увеличивается). Начало отчета и синхронизацию темпа передачи определяет бортовая аппаратура каждого БПЛА самостоятельно и независимо, формирование всех рабочих временных интервалов производится внутренней системой тактирования, реализованной на кварцевых осцилляторах.
При таком построении канала передачи данных «БПЛА - мобильный командно-измерительный пункт» возможно спорадическое перекрытие кадров от одного или нескольких БПЛА с потерей части информации (как изображено на фиг. 4 для кадров X). С целью повышения суммарной информативности системы до достаточной, применяется ряд технических решений. Во-первых, выходные потоки данных всех БПЛА рассинхронизированы друг относительно друга за счет применения независимых систем тактирования и начальных точек отсчета. Во-вторых, каждый кадр передается не в момент наступления соответствующего такта, а со случайной временной задержкой Тсз. Тсз формируется бортовой аппаратурой непосредственно перед передачей каждого кадра, и, таким образом, в следствии возникающих временных флуктуаций, вероятность наложения нескольких подряд идущих кадров от одного БПЛА исчезающе мала. В-третьих, период выдачи кадров задается с некоторой заведомой избыточностью для компенсации вероятной частичной утери информации в результате наложений. Отсутствие необходимости привязки потоков данных к одной синхронизированной системе отсчета (например, к шкале единого времени UTS глобальной системы спутникового позиционирования) повышает общую устойчивость канала данных к внешним помеховым воздействиям, в том числе средствами радиоэлектронной борьбы. Частичная или полная потеря информации от глобальных спутниковых навигационных систем ГЛОНАСС или GPS одним или несколькими участниками информационного обмена существенного влияния на процесс сопровождения малогабаритной радиостанцией передачи команд управления беспилотным летательным аппаратом испытываемых БПЛА не окажет.
Основным режимом работы заявляемого устройства является режим приема данных. При необходимости передачи команды управления производится формирование и выдача в общий узкополосный радиоканал нескольких ее повторов общей длительностью посылки Тк. Введение повторов повышает вероятность корректной доставки данных требуемому абоненту.
Все БПЛА, обнаружив в радиоканале маркер начала команды, переходят в режим запрета передачи и осуществляют прием данных в течении времени гарантированной трансляции всех повторов текущей команды (Тк). После приема всей командной последовательности (либо через интервал Тк), бортовая аппаратура БПЛА возвращается к режиму периодической передачи информации, а малогабаритная радиостанция передачи команд управления -к режиму прием данных БПЛА.
Таким образом, время трансляции команды определяется интервалом Тк, при этом нет временных затрат на ожидание свободного информационного слота в общем информационном потоке для передачи данных, как в случаях синхронных систем передачи.
Электропитание заявляемого устройства осуществляется напряжением 27 вольт от бортовой сети мобильного объекта, на базе которого организуется мобильный командно-измерительный пункт (вертолет, самолет).
Для обеспечения гарантированного бесперебойного электропитания, и, как следствие, повышения уровня безопасности проведения летных испытаний, в малогабаритную радиостанцию передачи команд управления введен модуль гарантированного питания аппаратуры (12). Напряжение бортовой сети поступает на стабилизатор и преобразователь напряжения (13), входящий в состав модуля гарантированного питания аппаратуры, где осуществляется фильтрация от помех, гальваническая развязка с бортовой сетью и стабилизация уровня. Далее, стабилизированное напряжение преобразуется формирователем (15) в набор необходимых для работы устройства напряжений.
В случае возникновения аварийной ситуации пропадания напряжения бортовой сети или выхода параметров напряжения за границы разрешенных значений (например, в следствии неисправности бортовой схемы электропитания или ошибочной коммутации напряжений бортовой сети летно-техническим персоналом), стабилизатор и преобразователь напряжений автоматически переключается с выхода бортовой сети на выход встроенной в модуль гарантированного питания аппаратуры аккумуляторной батареи (14).
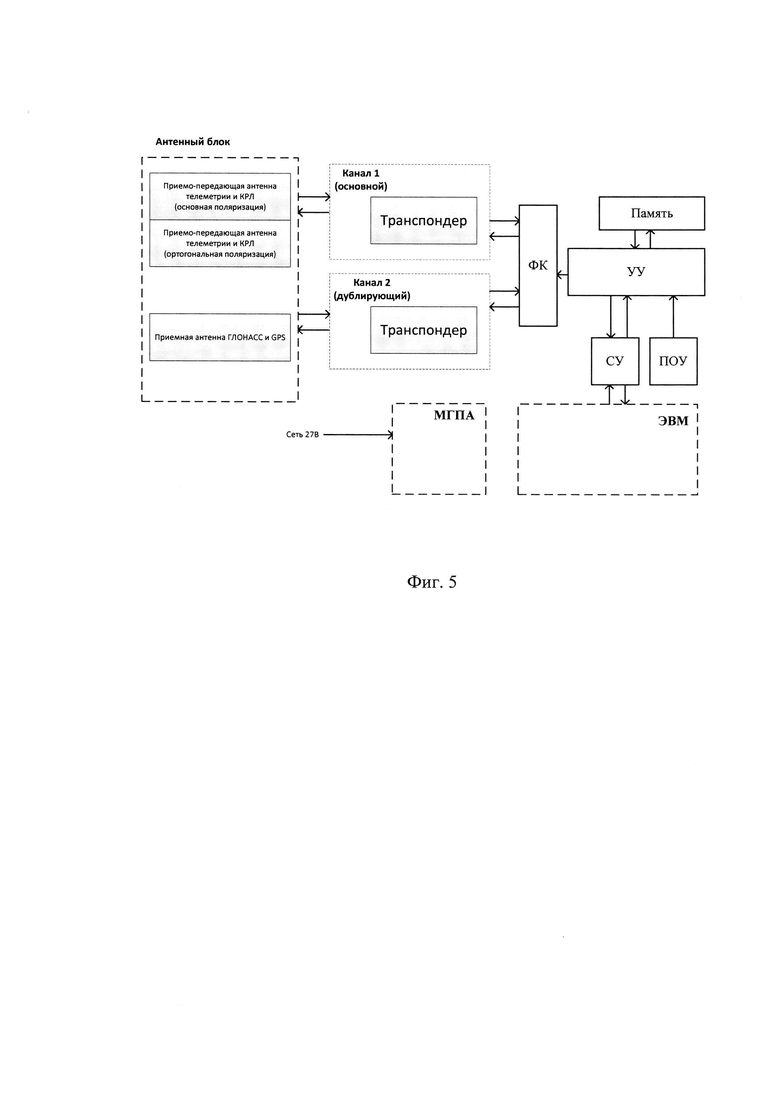
Для дополнительного повышения уровня безопасности проведения летных испытаний, при необходимости (например, когда проводятся летные испытания высокоскоростных низколетящих БПЛА, при этом запрограммированная в бортовую систему управления траектория движения содержит сложные маневры), в малогабаритную радиостанцию передачи команд управления вводится вторая приемопередающая антенна телеметрии и КРЛ, работающая на поляризации, ортогональной поляризации основной антенны, а также дублирующий приемо-передающий тракт (второй канал), подключенный к ней.
Функциональная схема заявляемого устройства, содержащего два независимых приемопередающих канала, приведена на фиг.5.
Данное решение, помимо резервного дублирования приемопередающего и антенного трактов, что значительно повышает общую надежность, за счет дополнительной приемо-передающей антенны с ортогональной основной антенне поляризацией обеспечивает прием данных при совершении БПЛА сложных маневров, когда пространственное положение антенны бортовой системы БПЛА быстро и непредсказуемо изменяется.
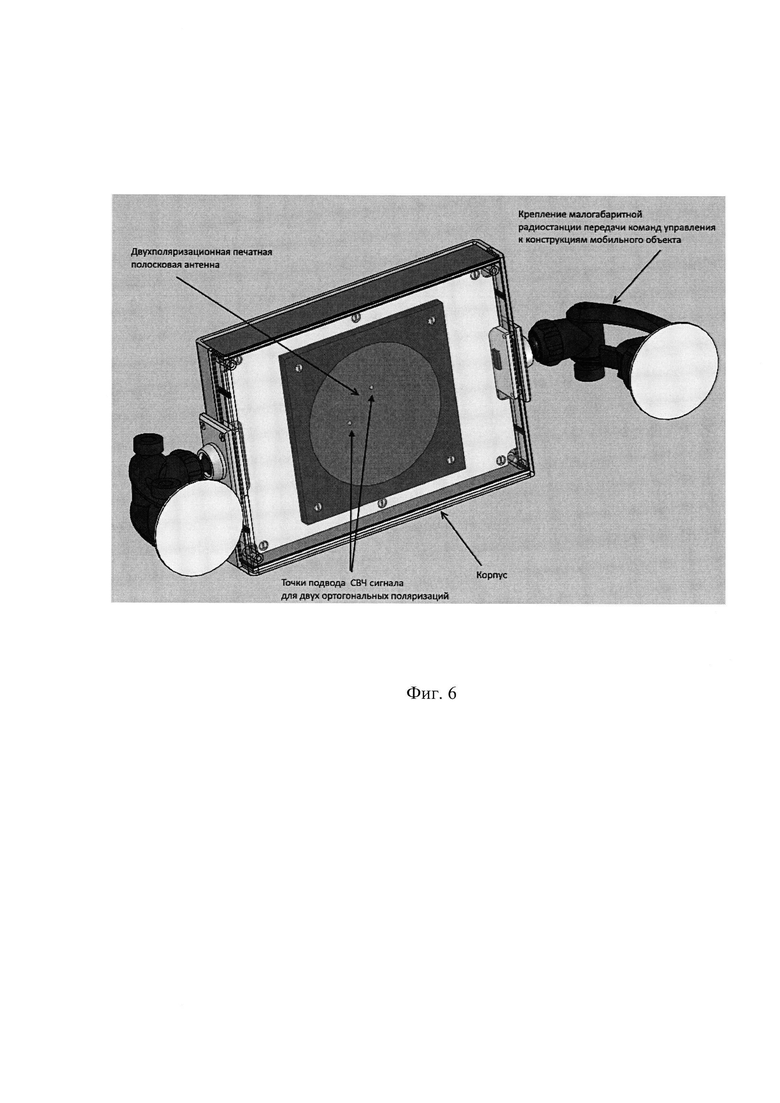
Решение технической задачи уменьшения габаритов заявляемого устройства достигается комплексом мер: использованием частотного диапазона 433,7 МГц, что позволяет снизить геометрические размеры приемопередающей антенны телеметрии и КРЛ (2) антенного блока (1); применением современных радиотехнических материалов, позволяющих выполнить антенну (2), как основную, так и резервного дополнительного канала, в виде общей печатной полосковой антенны, а антенный блок (1) совместить конструктивно с транспондером, устройством управления, формирователем команд и модулем гарантированного питания аппаратуры.
Внешний вид малогабаритной радиостанции передачи команд управления приведен на фиг. 6.
| название | год | авторы | номер документа |
|---|---|---|---|
| Малогабаритное приемо-передающее устройство для контроля полета беспилотного летательного аппарата | 2017 |
|
RU2655041C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2390815C1 |
| АВИАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ | 2007 |
|
RU2346852C1 |
| СИСТЕМА СВЯЗИ НАЗЕМНОГО ПУНКТА УПРАВЛЕНИЯ С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2024 |
|
RU2825035C1 |
| УНИФИЦИРОВАННЫЙ БОРТОВОЙ МОДУЛЬ АВИАЦИОННОГО НАБЛЮДЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2794287C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2834270C1 |
| Интегрированный комплекс бортового оборудования беспилотного летательного аппарата | 2023 |
|
RU2809930C1 |
| Беспилотный аппарат и комплекс наблюдения для него | 2016 |
|
RU2642202C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2480728C2 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2424539C1 |
Изобретение относится к технике радиосвязи, а именно к устройствам радиосвязи с высокоскоростными мобильными объектами, в частности для дистанционного контроля полета беспилотных летательных аппаратов (БПЛА) в режиме реального времени. Технический результат заключается в расширении функциональных возможностей устройства и повышении уровня безопасности проведения летных испытаний БПЛА. Малогабаритная радиостанция передачи команд управления содержит антенный блок, транспондер, формирователь команд, устройство управления, устройство хранения данных, согласующее устройство, пульт оперативного управления, пульт управления вводом и выводом данных, устройство отображения и модуль гарантированного питания аппаратуры. Антенный блок состоит из приемопередающей антенны телеметрии и командной радиолинии и приемной антенны сигналов навигационных спутниковых систем ГЛОНАСС и GPS. Первый и второй выходы и вход антенного блока соединены с первым и вторым входом и выходом транспондера соответственно. Транспондер включает в себя фидер антенно-фидерного устройства, коммутатор высокочастотных сигналов, приемник навигационных координат беспилотного летательного аппарата и квитанций выполнения команд, передатчик команд управления, усилитель мощности высокочастотного сигнала, малошумящий усилитель высокочастотных сигналов навигационных спутниковых систем и навигационный приемный модуль. Третий выход транспондера соединен с формирователем команд. В формирователь команд введен специальный алгоритм шифрования и преобразования передаваемых команд управления. Первый выход пульта управления вводом и выводом данных подключен к устройству отображения. Модуль гарантированного питания аппаратуры содержит стабилизатор и преобразователь напряжения, аккумуляторную батарею и формирователь выходных напряжений. Первый выход и первый и второй вход устройства управления соединен с первым входом и первым выходом согласующего устройства и выходом пульта оперативного управления соответственно. 1 з.п. ф-лы, 6 ил. 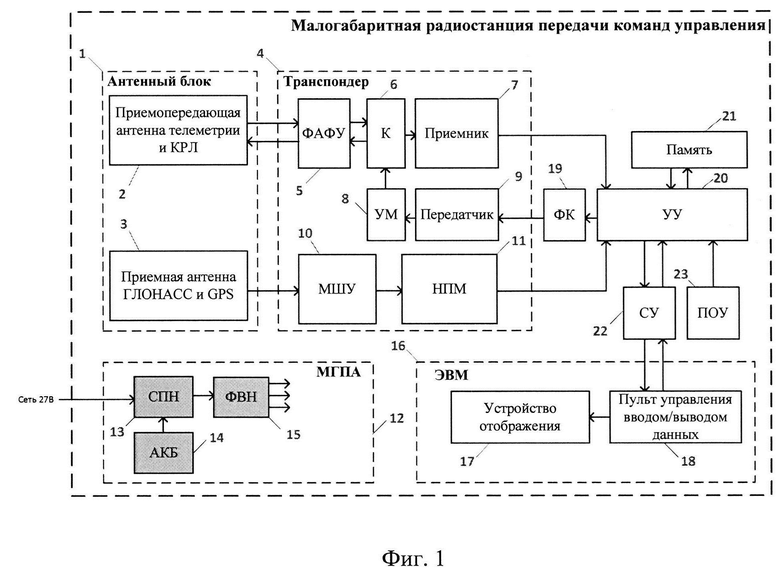
1. Малогабаритная радиостанция передачи команд управления, содержащая антенный блок, состоящий из приемопередающей антенны телеметрии и командной радиолинии и приемной антенны сигналов навигационных спутниковых систем ГЛОНАСС и GPS, первый и второй выходы которого соединены с первым и вторым входом транспондера соответственно, а вход подключен к первому выходу транспондера, включающего в себя фидер антенно-фидерного устройства, коммутатор высокочастотных сигналов, приемник навигационных координат беспилотного летательного аппарата и квитанций выполнения команд, передатчик команд управления, усилитель мощности высокочастотного сигнала, малошумящий усилитель высокочастотных сигналов навигационных спутниковых систем и навигационный приемный модуль, формирователь команд, выход которого соединен с третьим входом транспондера, устройство хранения данных, пульт управления вводом и выводом данных, первый выход которого подключен к устройству отображения, отличающаяся тем, что в нее введены модуль гарантированного питания аппаратуры, содержащий стабилизатор и преобразователь напряжения, аккумуляторную батарею и формирователь выходных напряжений; устройство управления, первый выход и первый вход которого соединены с первым входом и первым выходом согласующего устройства соответственно, ко второму входу устройства управления подключен выход пульта оперативного управления; при этом в формирователь команд введен специальный алгоритм шифрования и преобразования передаваемых команд управления.
2. Устройство по п. 1, отличающееся тем, что в него введена дополнительная приемопередающая антенна телеметрии и КРЛ, работающая на поляризации, ортогональной поляризации основной антенны, а также дублирующий приемо-передающий тракт (второй канал), подключенный к ней.
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2390815C1 |
| Малогабаритное приемо-передающее устройство для контроля полета беспилотного летательного аппарата | 2017 |
|
RU2655041C1 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА ТЕЛЕМЕТРИЧЕСКОЙ И КОМАНДНОЙ ИНФОРМАЦИИ В ОДНОМ ДИАПАЗОНЕ РАДИОЧАСТОТ МНОГОПОТОЧНОЙ РАДИОСИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2422994C1 |
| СИСТЕМА СВЯЗИ С РЕТРАНСЛЯТОРАМИ, ИЗМЕНЯЮЩИМИ СВОЕ МЕСТОПОЛОЖЕНИЕ В ПРОСТРАНСТВЕ | 2007 |
|
RU2352067C1 |
| CN 1929335 A, 14.03.2007 | |||
| CN 109799837 A, 24.05.2019 | |||
| US 10302759 B1, 28.05.2019. | |||

