Изобретение относится к способу выполнения переключения переключателя ступеней нагрузки при помощи приводной системы. Приводная система включает в себя по меньшей мере один двигатель, который воздействует на приводной вал. Предусмотрено устройство управления и система датчиков, причем система датчиков непосредственно или опосредованно соединена с приводным валом.
Далее изобретение относится к приводной системе для переключателя ступеней нагрузки для выполнения соответствующего изобретению способа.
Привод для переключателя ступеней нагрузки известен, например, из германской полезной модели DE 20 2010 011 521 U1. В этом приводе переключателя ступеней нагрузки расположен двигатель, который системой рычагов жестко соединен с соответствующими переключателями ступеней нагрузки. Приведение в действие осуществляется при помощи жесткой проводки, другими словами посредством приведения в действие контакторов двигателя двигатель включается или выключается. Через приводной вал переключатели ступеней нагрузки приводятся затем в действие. После сборки в приводе ничего не может больше меняться. Вследствие этого привод становится неподатливым и негибким. Простейшие адаптации требуют сложных мер по перестройке.
Переключатели ступеней нагрузки используются, как правило, для регулировки напряжения в различных трансформаторах. Для приведения в действие переключателя ступеней нагрузки применяется приводная система. При этом расположенный на корпусе трансформатора двигатель соединен через передаточный механизм с переключателем ступеней нагрузки. Посредством приведения в действие электромеханических контакторов двигатель снабжается энергией. В зависимости от проводки двигатель приводится в действие таким образом, что его приводной вал вращается либо в одном, либо в другом направлении. Этот тип приведения в действие неподатлив и тем самым негибок.
Исходя из этого, задача настоящего изобретения состоит в предоставлении улучшенного концепта для приведения в действие переключателя ступеней нагрузки, посредством которого повышается гибкость работы переключателя ступеней нагрузки и безопасность при переключении отводов.
Эта задача решается с помощью способа выполнения переключения переключателя ступеней нагрузки посредством приводной системы, который включает в себя признаки пункта 1 формулы изобретения.
Дальнейшая задача настоящего изобретения состоит в предоставлении приводной системы для переключателя ступеней нагрузки, посредствомкоторой повышается гибкость работы переключателя ступеней нагрузки и безопасность при переключении отводов.
Эта задача решается с помощью приводной системы для переключателя ступеней нагрузки, которая включает в себя признаки пункта 13 формулы изобретения.
Для выполнения соответствующего изобретению способа переключения переключателя ступеней нагрузки предусмотрена приводная система. Приводная система включает в себя по меньшей мере один двигатель, который воздействует на приводной вал. Устройство управления коммуникативным образом соединено с системой датчиков, причем система датчиков непосредственно или опосредованно соединена с приводным валом. Способ отличается следующими этапами: сначала устройством управления принимается сигнал для переключения переключателя ступеней нагрузки. На следующем этапе устройством управления определяется, было ли выполнено переключение с направления возрастания или направления убывания на текущий отвод. Затем определяется, должно ли выполняться переключение в направлении возрастания или направлении убывания на следующий отвод. На следующем этапе на основе определения на предыдущем этапе выбирается один из нескольких профилей движения для приводной системы переключателя ступеней нагрузки. На основе выбранного или выбранных профилей движения выполняется затем переключение. На заключительном этапе переключение выполняется и контролируется приводной системой согласно выбранному профилю движения.
Согласно предпочтительному варианту осуществления изобретения несколько профилей движения могут сохраняться в устройстве управления. С устройством управления может быть соотнесено для сохранения профилей движения запоминающее устройство.
Режим переключения у переключателя ступеней нагрузки согласно концепту использования нескольких профилей движения имеет то преимущество, что возможно более щадящее переключение, так как переключение может адаптироваться к механическим имеющимся условиям переключателя ступеней нагрузки. Вследствие этого могут также беречься механические конструктивные элементы. Дополнительно переключение может выполняться гибким. Кроме того, при помощи соответствующих профилей движения учитываются конструктивные особенности, такие как свободные ходы в селекторе переключателя ступеней нагрузки.
Согласно изобретению первый возможный профиль движения может описывать переключение переключателя ступеней нагрузки в направлении возрастания. При этом перед переключением определяется, было ли выполнено переключение с отвода на следующий более высокий отвод. При текущем переключении определяется, должно ли выполняться переключение со следующего более высокого отвода на следующий еще более высокий отвод.
Согласно изобретению второй возможный профиль движения может описывать переключение переключателя ступеней нагрузки в направлении убывания. При этом перед переключением определяется, было ли выполнено переключение с отвода на следующий более низкий отвод. При текущем переключении проверяется, выполняется ли переключение со следующего более низкого отвода на еще более низкий отвод.
В обоих случаях посредством выбранного профиля движения приводной вал переключателя ступеней нагрузки поворачивается на целое кратное 180 градусам. Предпочтительно приводной вал переключателя ступеней нагрузки поворачивается на 180 градусов или же 360 градусов. Может быть также, что приводной вал может также поворачиваться более чем на 360 градусов. В зависимости от типа переключателя и приводной системы приводной вал поворачивается в соответствии с соответствующим значением.
Согласно возможному варианту осуществления изобретения третий возможный профиль движения может описывать переключение переключателя ступеней нагрузки в направлении возрастания. При этом перед переключением проверяется, было ли выполнено переключение при предыдущем переключении с отвода на следующий более низкий отвод. При текущем переключении переключение выполняется в этом случае с текущего более низкого отвода снова на более высокий отвод с учетом свободного хода переключателя ступеней нагрузки.
Согласно возможному варианту осуществления четвертый возможный профиль движения может описывать переключение переключателя ступеней нагрузки в направлении убывания. Перед переключением проверяется, было ли выполнено переключение при предыдущем переключении с отвода на следующий более высокий отвод. При текущем переключении переключение выполняется в этом случае с более высокого отвода снова на более низкий отвод с учетом свободного хода переключателя ступеней нагрузки.
Профили движения выполнены таким образом, что они поворачивают приводные валы на целое кратное 180 градусам. К этому добавляется дополнительная величина угла, на которую осуществляется поворот, чтобы учитывался свободный ход передаточного механизма. В зависимости от типа переключателя и приводной системы приводной вал поворачивается в соответствии с соответствующим значением, и к нему добавляется значение свободного хода.
Согласно возможному дальнейшему варианту осуществления пятый профиль движения может выполняться таким образом, что профиль движения от отвода к достигаемому первому следующему более высокому отводу или к первому следующему более низкому отводу комбинируется по меньшей мере с одним дополнительным профилем движения. Благодаря комбинации может достигаться по меньшей мере один дальнейший следующий более высокий отвод или по меньшей мере один дальнейший следующий более низкий отвод. Назначение профилей движения осуществляется перед вводом в эксплуатацию приводной системы.
Текущий отвод определяется устройством управления. Определенный текущий отвод служит для выбора необходимого профиля движения или необходимых профилей движения. В отличие от общей идеи изобретения, для выбора профиля изобретения используются не только направления, но и положения переключателя ступеней нагрузки, другим словами отводы.
Каждый профиль движения образуется из двух переменных и может представляться в виде полиноминальной функции n-го порядка в двухмерной декартовой системе координат.
Сохраненные профили движения могут запрашиваться из устройства управления или блока управления приводной системы.
Соответствующая изобретению приводная система для переключателя ступеней нагрузки для выполнения способа включает в себя приводной вал, который соединяет приводную систему с переключателем ступеней нагрузки. Двигатель служит для приведения в движение приводного вала. Система обратной связи выполнена для того, чтобы определять положение приводного вала. На основе определенного положения генерируется сигнал обратной связи. Устройство управления выполнено для того, чтобы в зависимости от выбранного профиля движения и сигнала обратной связи воздействовать на работу двигателя.
Устройство управления включает в себя блок управления и силовую часть. Силовая часть служит для энергоснабжения двигателя. По меньшей мере один профиль движения сохранен в памяти силовой части. Блок управления выбирает профиль движения, и силовая часть действует на двигатель в соответствии с профилем движения.
Улучшенный концепт с профилями движения основывается на той идее, что прежде чем переключатель ступеней нагрузки переключается или приводится в действие, выбирается профиль движения для приводной системы, при помощи которого выполняется переключение. При этом сначала должно устанавливаться, в каком положении (отводе) переключатель ступеней нагрузки находился до этого, и на какое положение (отвод) он должен переключаться. Таким образом, выбирается соответствующий профиль движения для приводной системы для следующего переключения.
Дополнительно может также устанавливаться, где находится переключатель ступеней нагрузки в ходе переключения, другими словами в каком положении или на какой ступени (отводе) он находится. Дополнение направлений переключения фактическим положением может в отдельных случаях также служить для выбора профиля движения. Благодаря выбору ориентированного на конкретный этап переключения или переключение профиля движения повышается безопасность всей системы. Кроме того, механические конструктивные элементы излишне не нагружаются. Дополнительно скорость переключения может оптимизироваться и, если возможно, даже повышаться.
Знание направлений переключения (прошлое направление и будущее направления) в сочетании с текущей ступенью позволяет выбирать оптимально выполненный для следующего переключения профиль движения. Механические свободные ходы, зазоры и особенности в ходе приведения в действие учитываются таким образом индивидуально.
Согласно по меньшей мере одному варианту осуществления изобретения сигнал переключения вызывается необходимым для регулировки ступенчатого трансформатора регулятором напряжения, ручным вводном данных или внешним сигналом.
Согласно по меньшей мере одному варианту осуществления изобретения устройство управления имеет память, в которой сохранен каждый профиль движения и согласование профиля движения с этапом переключения, а также текущая ступень.
Согласно по меньшей мере одному варианту осуществления изобретения устройство управления имеет блок управления и силовую часть, причем в памяти блока управления сохранено согласование профиля движения с этапом переключения и текущая ступень, а в памяти силовой части сохранены профили движения.
Приводная система, соответствующая улучшенному концепту, может приводить в движение приводной вал целенаправленно, другими словами в соответствии с предварительно выбранным профилем движения. Профиль движения задает не только скорость или крутящий момент. Профиль движения задает также в какой момент времени или при каком положении приводного вала какой крутящий момент или какая скорость реализуются на приводном валу. Благодаря использованию подобных профилей движения может оказываться влияние на целенаправленные участки схемы переключателя. При помощи сигнала обратной связи текущее положение приводного вала, то есть фактическое значение, сравнивается с профилем движения, то есть с расчетным значением. Тем самым система становится гибкой и безопасной.
Терминология “положение приводного вала” включает в себя измеряемые величины, из которых может однозначно определяться положение приводного вала, при необходимости в пределах диапазона допуска.
Согласно по меньшей мере одному варианту осуществления приводная система служит для того, чтобы приводить в движение вал переключателя, переключателя ступеней нагрузки или соответствующий компонент переключателя ступеней нагрузки. Вследствие этого переключатель ступеней нагрузки побуждается выполнять одну или несколько операций, например выполнять переключение между двумя отводами обмотки оборудования или части переключения, как например переключение нагрузки, приведение в действие селектора или приведение в действие предварительного селектора.
Согласно по меньшей мере одному варианту осуществления приводной вал непосредственно или опосредованно, в частности через один или несколько передаточных механизмов, соединен с переключателем ступеней нагрузки, в частности с валом переключателя ступеней нагрузки.
Согласно по меньшей мере одному варианту осуществления приводной вал непосредственно или опосредованно, в частности через один или несколько передаточных механизмов, соединен с переключателем ступеней нагрузки, в частности с валом переключателя ступеней нагрузки.
Согласно по меньшей мере одному варианту осуществления приводной вал непосредственно или опосредованно, в частности через один или несколько передаточных механизмов, соединен с двигателем, в частности с валом двигателя.
Согласно по меньшей мере одному варианту осуществления положение, в частности абсолютное положение, вала двигателя соответствует положению, в частности абсолютному положению приводного вала. То есть из положения вала двигателя можно однозначно делать вывод, при необходимости в пределах диапазона допуска, о положении приводного вала.
Согласно по меньшей мере одному варианту осуществления воздействие включает в себя управление, регулировку, торможение, ускорение или остановку двигателя. Регулировка может включать в себя, например, регулировку положения, регулировку скорости, регулировку ускорения или регулировку крутящего момента. По меньшей мере в случае таких регулировок можно говорить о том, что приводная система представляет собой систему сервопривода.
Согласно по меньшей мере одному варианту осуществления приводная система включает в себя блок контроля, который выполнен для того, чтобы на основе сигнала обратной связи контролировать одну или несколько операций переключателя. Контроль включает в себя в частности контроль в отношении того, правильно ли, в частности в пределах ли предварительно заданных промежутков времени, выполняются отдельные операции или их части.
Согласно по меньшей мере одному варианту осуществления устройство управления включает в себя блок управления и силовую часть для управляемого или регулируемого энергоснабжения двигателя. Блок управления выполнен для управления силовой частью. В силовой части сохранен по меньшей мере один профиль движения, который может образовываться из двух переменных и представляться в виде полиноминальной функции n-го порядка в двухмерной декартовой системе координат.
Согласно по меньшей мере одному варианту осуществления силовая часть выполнена в виде преобразователя частоты или сервопреобразователя частоты или в виде эквивалентного электронного, в частности полностью электронного, блока для приводных машин.
Согласно различным вариантам осуществления устройство управления включает в себя систему обратной связи полностью или частично.
Абсолютное положение приводного вала может, например, сравниваться устройством управления. При существенном отклонении устройство управления может выдавать сообщение об ошибке или инициировать меру обеспечения безопасности.
Согласно по меньшей мере одному варианту осуществления система обратной связи выполнена для того, чтобы выявлять положение ротора двигателя и в зависимости от положения ротора назначать значение для положения приводного вала.
Согласно по меньшей мере одному варианту осуществления, говоря о положении ротора, речь идет об угловом диапазоне, в котором находится ротор двигателя, при необходимости в комбинации с несколькими полными оборотами ротора.
В зависимости от исполнения, в частности от числа пар полюсов, ротора положение или абсолютное положение вала двигателя может тем самым точно определяться по меньшей мере до 180°, например устройством управления. Благодаря преобразованию одним или несколькими передаточными механизмами достигаемая вследствие этого точность положения приводного вала существенно больше. Оценка устройством управления соответствует в этом случае в некоторой степени функции виртуального датчика. Следовательно, также в случае полного выхода из строя датчика абсолютных значений системы обратной связи по меньшей мере аварийный режим эксплуатации может поддерживаться, и/или переключатель ступеней нагрузки может приводиться в безопасное положение.
Согласно по меньшей мере одному варианту осуществления система обратной связи включает в себя датчик абсолютных значений, который расположен и выполнен для того, чтобы регистрировать абсолютное положение приводного вала или абсолютное положение дополнительного вала, который соединен с приводным валом, и на основе зарегистрированного положения генерировать по меньшей мере один выходной сигнал. Система обратной связи выполнена для того, чтобы выявлять значение для положения приводного вала на основе по меньшей мере одного выходного сигнала.
Согласно по меньшей мере одному варианту осуществления датчик абсолютных значений закреплен непосредственно или опосредованно на валу двигателя, приводном валу или соединенном с ним валу.
Согласно по меньшей мере одному варианту осуществления датчик абсолютных значений включает в себя многооборотный датчик угла поворота или однооборотный датчик.
Согласно по меньшей мере одному варианту осуществления датчик абсолютных значений выполнен для того, чтобы регистрировать положение приводного вала или положение дополнительного вала посредством способа сканирования.
Согласно по меньшей мере одному варианту осуществления способ сканирования включает в себя оптический, магнитный, емкостной, резистивный или индуктивный способ сканирования.
Согласно по меньшей мере одному варианту осуществления система обратной связи включает в себя комбинацию из датчика абсолютных значений и вспомогательного контакта, которые в комбинации расположены и выполнены для того, чтобы регистрировать абсолютное положение приводного вала или абсолютное положение дополнительного вала, который соединен с приводным валом, и на основе зарегистрированного положения генерировать по меньшей мере один выходной сигнал. Система обратной связи выполнена для того, чтобы выявлять значение для положения приводного вала на основе по меньшей мере одного выходного сигнала.
Согласно по меньшей мере одному варианту осуществления датчик абсолютных значений и вспомогательный контакт закреплены непосредственно или опосредованно на валу двигателя, приводном валу или соединенном с ним валу.
Согласно по меньшей мере одному варианту осуществления датчик абсолютных значений выполнен в виде однооборотного датчика угла поворота или инкрементального датчика или виртуального датчика. Вспомогательный переключатель выполнен в виде по меньшей мере одного микропереключателя или резольвера или датчика sin/cos.
Согласно по меньшей мере одному варианту осуществления датчик абсолютных значений и вспомогательный контакт выполнены для того, чтобы регистрировать положение приводного вала или положение дополнительного вала посредством способа сканирования.
Согласно по меньшей мере одному варианту осуществления способ сканирования включает в себя оптический, магнитный, емкостной, резистивный или индуктивный способ сканирования.
Согласно по меньшей мере одному варианту осуществления профиль движения может быть образован из двух переменных и представляться в виде полиноминальной функции n-го порядка в двухмерной декартовой системе координат.
Согласно по меньшей мере одному варианту осуществления переменными являются прямые величины или косвенные величины приводной системы, как например время, угол поворота приводного вала, ток, напряжение, скорость, крутящий момент или ускорение.
Согласно по меньшей мере одному варианту осуществления переменная может представляться в каждом случае осью системы координат.
Согласно по меньшей мере одному варианту осуществления устройство управления может действовать на второй двигатель.
Согласно по меньшей мере одному варианту осуществления устройство управления может иметь вторую силовую часть, которая действует на второй двигатель.
Согласно по меньшей мере одному варианту осуществления устройство управления может действовать на второй двигатель таким образом, что он выполняет профиль движения фактического значения системы обратной связи первого двигателя.
Согласно по меньшей мере одному варианту осуществления переключатель ступеней нагрузки имеет переключатель нагрузки и селектор, а также двойной реверсивный переключатель или реверсивный переключатель или предварительный селектор.
Далее изобретение и его преимущества более подробно разъясняются на основе приложенных схематичных чертежей. Показаны:
фиг. 1 - привод для переключателя ступеней нагрузки, при помощи которого может осуществляться переключение между разными отводами трансформатора;
фиг. 2 - последовательность этапов способа для приведения в действие переключателя ступеней нагрузки согласно улучшенному концепту;
фиг. 3 - схематичное изображение варианта осуществления переключателя ступеней нагрузки с приводной системой согласно улучшенному концепту;
фиг. 4a - профиль движения для соответствующей изобретению приводной системы, который представляет собой угол поворота приводного вала в качестве функции времени; и
фиг. 4b - профиль движения для соответствующей изобретению приводной системы, который представляет собой крутящий момент в качестве функции угла поворота приводного вала.
Для одинаковых или действующих одинаково элементов изобретения используются идентичные ссылочные позиции. Кроме того, для наглядности на отдельных фигурах изображаются только те ссылочные позиции, которые необходимы для описания соответствующей фигуры. Фигуры изображают лишь примеры осуществления изобретения, не ограничивая, однако, изобретение изображенными примерами осуществления.
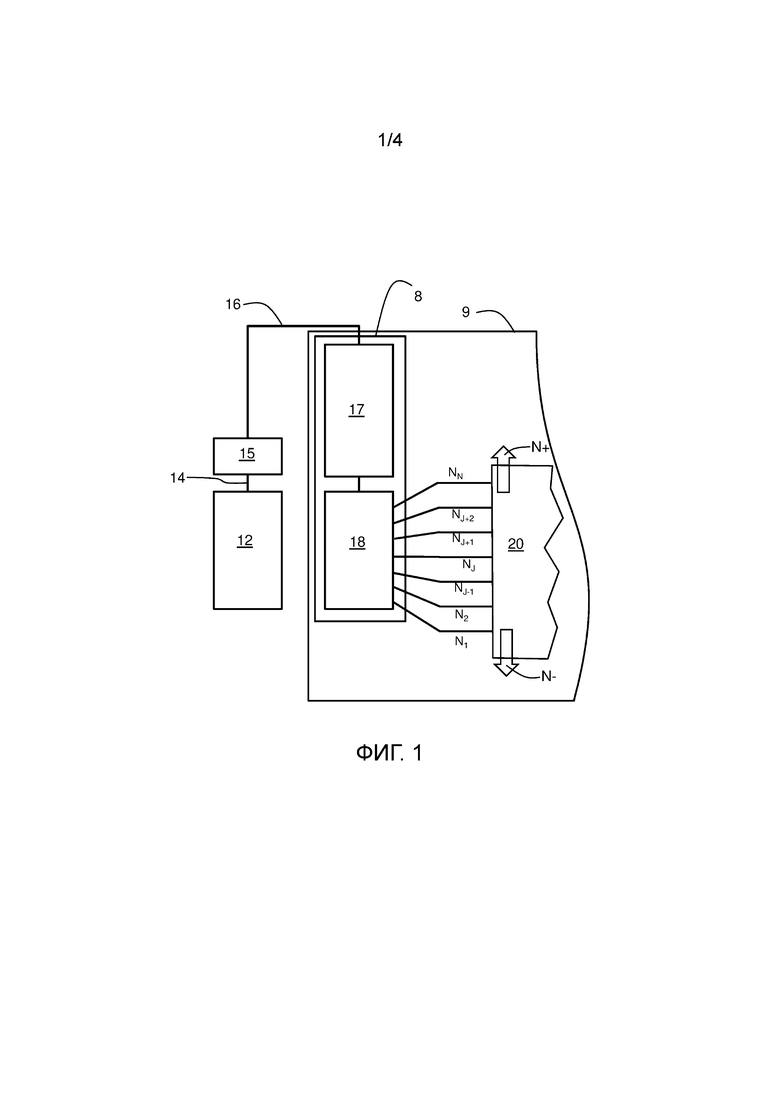
Фиг. 1 показывает структурную схему взаимодействия переключателя 8 ступеней нагрузки с отводами N1, N2,…,NN регулирующей обмотки 20 трансформатора 9. Для приведения в действие селектора 18 и переключателя 17 нагрузки предусмотрен двигатель 12, который через передаточный механизм 15 действует на селектор 18 и переключатель 17 нагрузки, то есть на переключатель 8 ступеней нагрузки. Через вал 14 двигателя и приводной вал 16 двигатель 12 действует на переключатель 8 ступеней нагрузки, для того чтобы осуществлять переключение в направлении N+ возрастания с отвода NJ на следующий более высокий отвод NJ+1 или в направлении N- убывания с отвода NJ на следующий более низкий отвод NJ-1 регулирующей обмотки 20 трансформатора 9.
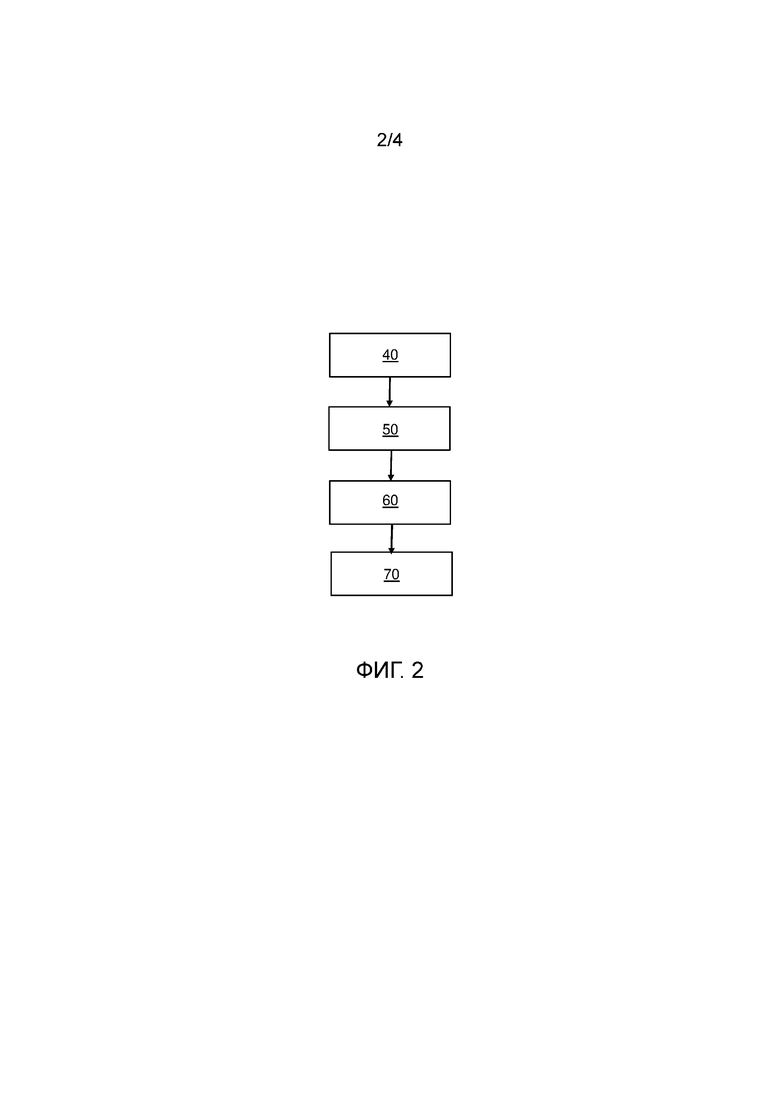
Фиг. 2 показывает последовательность этапов способа для приведения в действие переключателя 8 ступеней нагрузки при помощи соответствующей изобретению приводной системы 3 (см. фиг. 3). На первом этапе 40 сначала подается на устройство 2 управления сигнал для “переключения”. Этот сигнал создается регулятором напряжения, системой контроля или посредством ручного ввода данных (здесь не изображено). То есть переключатель 8 ступеней нагрузки должен, например, приводиться в действие, для того чтобы адаптировать тем самым напряжение трансформатора 9 (см. фиг. 1). Однако возможны также юстировочные движения во время технического обслуживания, другими словами приведение в действие переключателя 8 ступеней нагрузки в режиме технического обслуживания. В устройстве 2 управления затем на следующем этапе 50 проверяется, в каком направлении (направлении N+ возрастания или направлении N- убывания) трансформатора 9 выполняется переключение, то есть на какой отвод N1, N2,…,NN или ступень. Кроме того, проверяется, с какого направления (направления N+ возрастания или направления N- убывания), то есть с какого положения или ступени, было выполнено переключение на текущее положение (отвод NJ). Порядок этих этапов произволен. На следующем этапе 60 выбирается соответствующий результату профиль 22 движения, и при помощи этого профиля 22 движения переключатель 8 ступеней нагрузки приводится в действие на следующем этапе 70.
Этот упрощенный способ позволяет приводить в действие простые переключатели 8 ступеней нагрузки лишь при помощи двух или четырех профилей 22 движения.
Первый возможный профиль 22 движения описывает при этом переключение переключателя 8 ступеней нагрузки в направлении N+ возрастания, если в начале переключение было выполнено не в направлении N- убывания. Другими словами перед переключением было выполнено переключение с отвода NJ на отвод NJ+1, и теперь переключение должно выполняться с отвода NJ+1 на отвод NJ+2. Таким образом, переключение выполняется в том же направлении, то есть направлении N+ возрастания. При этом приводной вал 16 переключателя 8 ступеней нагрузки поворачивается предпочтительно на 180 градусов или же 360 градусов. Однако приводной вал 16 может также поворачиваться более чем на 360 градусов.
Второй возможный профиль 22 движения описывает переключение переключателя 8 ступеней нагрузки в направлении N- убывания, если в начале переключение было выполнено не в противоположном направлении переключения. Другими словами перед переключением было выполнено переключение с отвода NJ+2 на отвод NJ+1, и теперь переключение должно выполняться на отвод NJ. Таким образом, переключение выполняется в том же направлении. При этом приводной вал 16 поворачивается предпочтительно на 180 градусов или же 360 градусов. Однако приводной вал 16 может также поворачиваться более чем на 360 градусов.
Если, например, в переключателе 8 ступеней нагрузки смонтированы механизмы свободного хода (не изображены), которые имеют значение при смене с направления N- убывания на направление N+ возрастания или наоборот (то есть с первого направления переключения на второе направление переключения, причем оно противоположно первому направлению переключения), эти механизмы свободного хода должны учитываться при переключении. Эти механизмы свободного хода являются компонентами механических систем переключателя 8 ступеней нагрузки, например ввиду дожимных устройств они установлены в пружинном накопителе энергии или в селекторе 18. Для этого сохраняется третий и четвертый профиль 22 движения в устройстве 2 управления. Этот профиль 22 движения имеет характеристики, которые отличаются от характеристик первого или второго профиля 22 движения. Например, приводной вал 16 поворачивается при третьем и четвертом профиле 22 движения на большее количество градусов, чем при первом и втором профиле 22 движения прежнего переключения. При переключении, которое выполняется при помощи поворота приводного вала на 180 градусов, в расчет должна включаться величина, которая учитывает механизм свободного хода. Приводная система 3 поворачивает приводной вал 16 в этом случае более чем лишь на 180 градусов. При этом доля от механизма свободного хода прибавляется к базовой величине, которая необходима для выполнения переключения. Если последующее переключение должно снова происходить в том же направлении (направлении N+ возрастания или направлении N- убывания), используется соответствующий профиль 22 движения.
Первый и второй или третий и четвертый профили 22 движения могут быть выполнены идентичным за исключением своих знаков. Принципиально профили 22 движения могут отличаться друг от друга каждой переменной. Они могут проходить, например, быстрее или медленнее. Они могут быть частично идентичны друг другу, однако они могут дополняться дополнительным участком.
Подводя итог, профиль 22 движения выбирается на основе направления (направления N+ возрастания или направления N- убывания) последнего переключения и направления (направления N+ возрастания или направления N- убывания) следующего переключения.
Однако в случае более сложных переключателей 8 ступеней нагрузки должно также учитываться фактическое положение или ступень отвода, в котором находится переключатель 8 ступеней нагрузки. В устройстве 2 управления в этом случае дополнительно на этапе 50 проверяется, в каком положении или ступени отвода переключатель 8 ступеней нагрузки находится в данный момент. Кроме того, проверяется, на какое положение или на какой отвод должно выполняться переключение, и с какого положения или отвода было выполнено переключение на текущее положение. Порядок этих этапов произволен. На следующем этапе 60 выбирается соответствующий результату профиль 22 движения, и при помощи этого профиля 22 движения переключатель 8 ступеней нагрузки приводится в действие на следующем этапе 70.
Здесь может быть также предусмотрен пятый профиль 22 движения. Он может быть необходим при так называемых проходных положениях переключателя 8 ступеней нагрузки или при выполненных асимметрично переключателях 8 ступеней нагрузки. В этом случае устройство 2 управления обнаруживает, что следующее положение является так называемым проходным положением. То есть на достигаемом при помощи профиля 22 движении первом отводе NJ+1 или NJ-1 не должна осуществляться остановка. Выбранный и достигаемый отвод NJ+X или NJ-X (X - это величина равная или большая 2) может достигаться только при помощи по меньшей мере одного дополнительного профиля 22 движения. Обнаружение подобного переключения осуществляется благодаря тому, что этап переключения с определенного отвода NJ на другой определенный отвод NJ+X или NJ-X или направление переключения (направлении N+ возрастания или направлении N- убывания) согласовывается по меньшей мере с одним дополнительным профилем 22 движения. Это согласование имеет место пред вводом в эксплуатацию приводной системы 3 и сохранено в памяти 50 устройства 2 управления или блока 10 управления. Также этот профиль 22 движения отличается своими характеристиками от первого и второго профиля 22 движения. В случае так называемого проходного положения приводной вал 16 должен поворачиваться во много раз больше, чем при нормальном переключении (с текущего отвода NJ на отвод NJ+1 или NJ-1) переключателя 8 ступеней нагрузки. Этот профиль 22 движения согласован таким образом с определенным переключением между двумя определенными отводами NJ и NJ+X или NJ и NJ-X.
Принципиально он допускает комбинацию из определения направлений переключения (прошедшего и будущего) и фактического положения или ступени, для того чтобы выбирать и выполнять прямо ориентированный на это переключение профиль 22 движения.
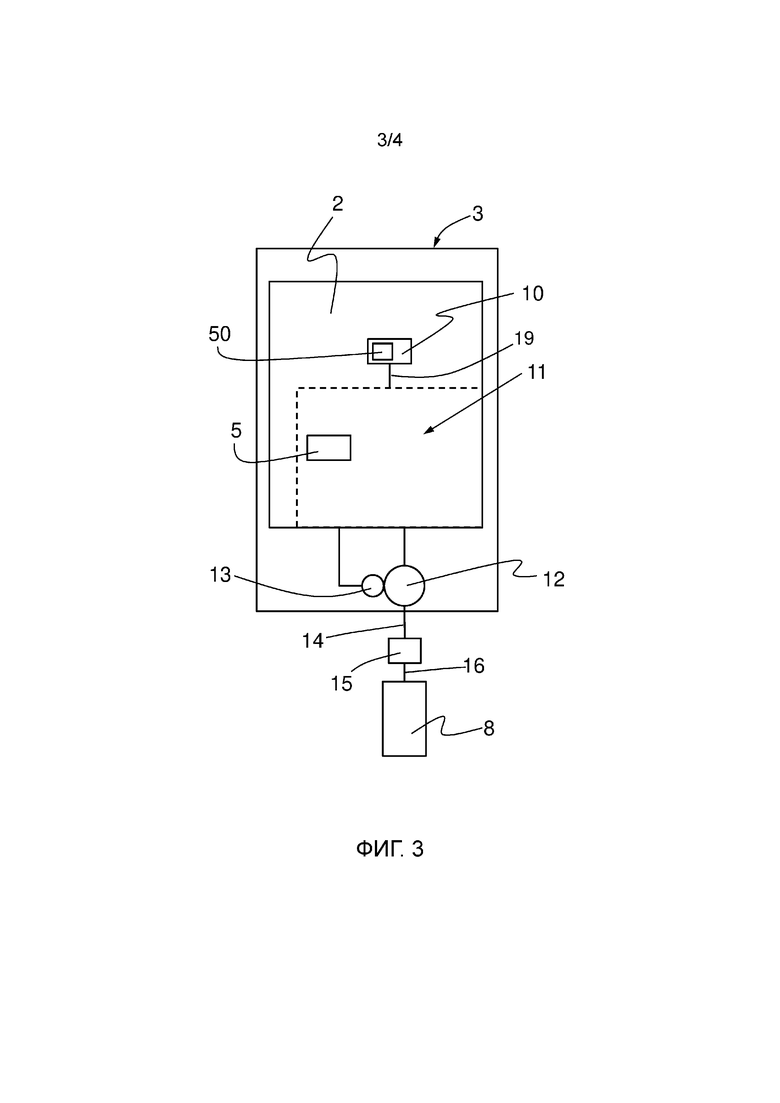
Фиг. 3 показывает схематичное изображение примерного варианта осуществления приводной системы 3 для переключателя 8 ступеней нагрузки. Приводная система 3 соединена через приводной вал 16 с переключателем 8 ступеней нагрузки. Приводная система 3 содержит двигатель 12, который через вал 14 двигателя и опционально передаточный механизм 15 может приводить в движение приводной вал 16. Устройство 2 управления приводной системы 3 включает в себя силовую часть 11, которая содержит, например, преобразователь частоты (не изображен) для управляемого или регулируемого энергоснабжения двигателя 12. Блок 10 управления соединен для управления силовой частью 11, например через шину 19. Приводная система 3 имеет систему 13 датчиков, которая служит в качестве системы 4 обратной связи или является частью системы 4 обратной связи и соединена с силовой частью 11 (не изображено). Далее система 13 датчиков непосредственно или опосредованно соединена с приводным валом 16 (не изображено).
Система 13 датчиков выполнена для того, чтобы регистрировать по меньшей мере одно первое значение для положения, в частности углового положения, например абсолютного углового положения приводного вала 16. Для этого система 13 датчиков может включать в себя, например, датчик абсолютных значений, в частности многооборотный датчик абсолютных значений, который закреплен на приводном валу 16, валу 14 двигателя или на другом валу, положение которого однозначно связано с абсолютным положением приводного вала 16. Положение приводного вала 16 может однозначно определяться из положения вала 14 двигателя, например через передаточное отношение передаточного механизма 15.
Система 4 обратной связи выполнена для того, чтобы регистрировать значение для положения приводного вала 16.
Устройство 2 управления, в частности блок 11 управления и/или силовая часть 12, выполнены для того, чтобы регулировать или управлять двигателем 12 в зависимости от сигнала обратной связи, который генерирует система 4 обратной связи на основе значения.
Силовая часть 11 имеет память 5 с сохраненными профилями 22 движения. Система 13 датчиков, которая используется в качестве системы 4 обратной связи, передает на силовую часть 11 положение вала 16 и контролирует тем самым, правильно ли выполняет приводной вал 16 профиль 22 движения или соблюдает ли приводной вал 16 заданные параметры.
В силовой части 11 сохранены несколько профилей 22 движения. Блоком 11 управления выбирается один из профилей 22 движения на основе описанного на фиг. 1 способа.
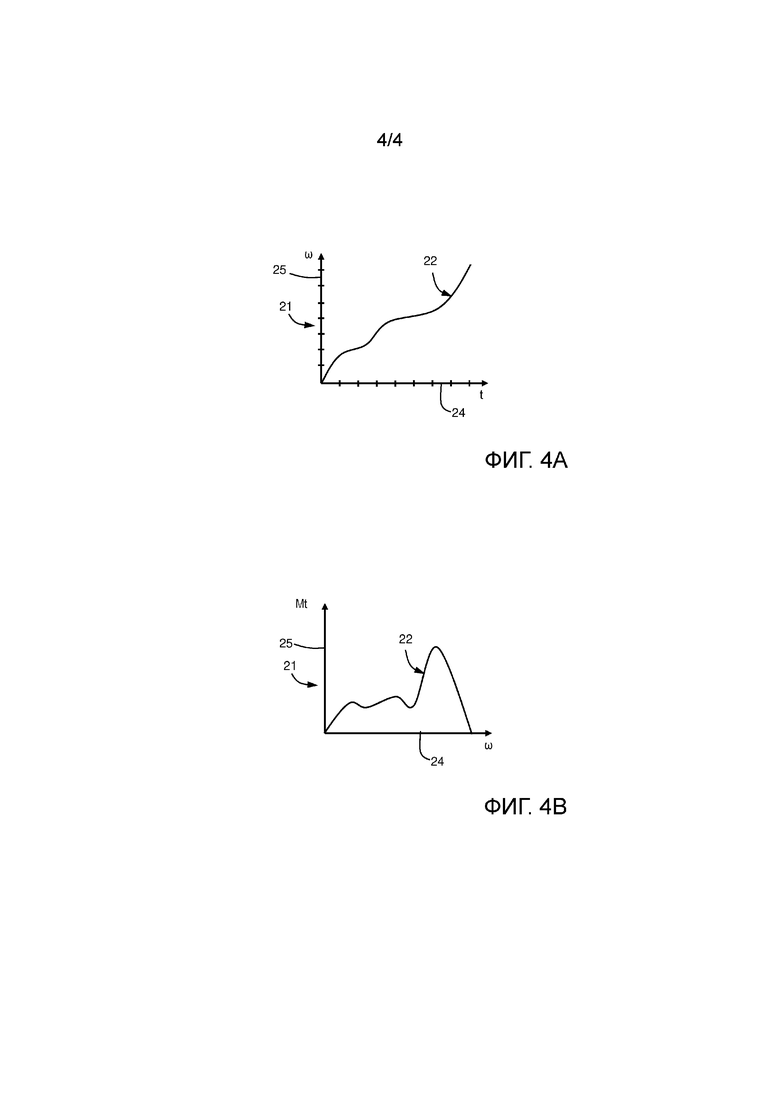
Фиг. 4a и 4b показывают возможные профили 22 движения двигателя 12 для манипуляции по переключению переключателя 8 ступеней нагрузки. Здесь в качестве примера показаны профили 22 движения в каждом случае в виде полиноминальной функцией n-го порядка с двумя переменными, которые нанесены на двухмерную декартову систему 21 координат. У показанного на фиг. 4a профиля 22 движения, на X-ось 24 нанесено время t, другими словами, как долго приводной вал 16 приводит в действие двигатель 12. На Y-ось 25 нанесен угол ω поворота приводного вала 16. Нанесенные на фиг. 4a на оси 24, 25 величины являются лишь примерами и не должны пониматься как ограничение изобретения. Нанесенные на X-ось 24 и Y-ось 25 переменные могут быть прямыми величинами или косвенными величинами приводной системы 3. Прямыми величинами могут быть, например, время t, угол поворота ω приводного вала 16, ток или напряжение. Косвенными величинами могут быть скорость, крутящий момент, ускорение или тому подобное.
Фиг. 4b показывает возможный профиль 22 движения двигателя 12 для манипуляции по переключению переключателя 1. Здесь косвенная величина крутящего момента M(t) нанесена как функция угла ω поворота и изображена в виде полиноминальной функции n-го порядка. У показанного на фиг. 4b профиля 22 движения, на X-ось 24 нанесен угол ω поворота. На Y-ось 25 нанесен действующий на приводной вал 16 крутящий момент M(t).
Профиль 22 движения задает расчетное значение, которое должен выполнять приводной вал 16. При выполнении профиля 22 движения фактическое значение, которое регистрируется системой 4 обратной связи, может иметь отклонение от расчетного значения. В зависимости от возможного заданного отклонения фактического значения от расчетного значения воздействие на двигатель 16 может либо прерываться, либо продолжаться. Отклонение может либо устанавливаться вручную, либо выявляться посредством процесса обучения.
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ
2 устройство управления
3 приводная система
4 система обратной связи
5 память
8 переключатель ступеней нагрузки
9 трансформатор
10 блок управления
11 силовая часть
12 двигатель
13 система датчиков
14 вал двигателя
15 передаточный механизм
16 приводной вал
17 переключатель нагрузки
18 селектор
19 шина
20 регулирующая обмотка
21 декартова система координат
22 профиль движения
24 X-ось
25 Y-ось
40 этап
50 этап
60 этап
70 этап
N+ направление возрастания
N- направление убывания
N1, N2,…,NN отвод
T время
M(t) крутящий момент
ω угол поворота
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОДНАЯ СИСТЕМА ДЛЯ ПЕРЕКЛЮЧАТЕЛЯ И СПОСОБ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ПЕРЕКЛЮЧАТЕЛЯ | 2020 |
|
RU2815269C2 |
| СПОСОБ ВЫПОЛНЕНИЯ ПЕРЕКЛЮЧЕНИЯ ПЕРЕКЛЮЧАТЕЛЯ И ПРИВОДНАЯ СИСТЕМА ДЛЯ ПЕРЕКЛЮЧАТЕЛЯ | 2020 |
|
RU2817402C2 |
| ПРИВОДНАЯ СИСТЕМА ДЛЯ ПЕРЕКЛЮЧАТЕЛЯ И СПОСОБ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ПЕРЕКЛЮЧАТЕЛЯ | 2020 |
|
RU2809703C2 |
| СПОСОБ НАСТРОЙКИ ПЕРЕКЛЮЧАТЕЛЯ СТУПЕНЕЙ НАГРУЗКИ | 2013 |
|
RU2643509C2 |
| ПЕРЕКЛЮЧАТЕЛЬ СТУПЕНЕЙ НАГРУЗКИ | 2013 |
|
RU2621070C2 |
| ПЕРЕКЛЮЧАТЕЛЬ СТУПЕНЕЙ НАГРУЗКИ | 2013 |
|
RU2638037C2 |
| ГОЛОВКА ПЕРЕКЛЮЧАТЕЛЯ СТУПЕНЕЙ НАГРУЗКИ, А ТАКЖЕ ПЕРЕКЛЮЧАТЕЛЬ СТУПЕНЕЙ НАГРУЗКИ С ГОЛОВКОЙ ПЕРЕКЛЮЧАТЕЛЯ СТУПЕНЕЙ НАГРУЗКИ | 2017 |
|
RU2730939C2 |
| ПЕРЕКЛЮЧАТЕЛЬ СТУПЕНЕЙ НАГРУЗКИ, СПОСОБ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ПЕРЕКЛЮЧАТЕЛЯ СТУПЕНЕЙ НАГРУЗКИ, А ТАКЖЕ ЭЛЕКТРИЧЕСКАЯ УСТАНОВКА С ПЕРЕКЛЮЧАТЕЛЕМ СТУПЕНЕЙ НАГРУЗКИ | 2016 |
|
RU2709191C2 |
| ПЕРЕКЛЮЧАТЕЛЬ СТУПЕНЕЙ НАГРУЗКИ И СТУПЕНЧАТЫЙ ТРАНСФОРМАТОР, ИМЕЮЩИЙ ПЕРЕКЛЮЧАТЕЛЬ СТУПЕНЕЙ НАГРУЗКИ | 2020 |
|
RU2823663C1 |
| СПОСОБ КОНТРОЛЯ ФУНКЦИОНИРОВАНИЯ ПЕРЕКЛЮЧАТЕЛЯ СТУПЕНЕЙ | 2013 |
|
RU2671810C1 |
Изобретение относится к электротехнике. Технический результат заключается в повышении надежности работы переключателя ступеней нагрузки. Предлагается способ выполнения переключения переключателя (8) ступеней нагрузки посредством приводной системы (3). Приводная система (3) включает в себя по меньшей мере один двигатель (12), который воздействует на приводной вал (16), устройство (2) управления и систему (13) датчиков, которая непосредственно или опосредованно соединена с приводным валом (16). Способ содержит четыре этапа. На первом этапе (40) устройством (2) управления принимают сигнал для переключения переключателя (8) ступеней нагрузки. На втором этапе (50) посредством устройства (2) управления определяют, было ли выполнено переключение с направления (N+) возрастания или направления (N-) убывания на текущий отвод (NJ), и выполняется ли переключение в направлении (N+) возрастания или направлении (N-) убывания на следующий отвод (NJ+1, NJ-1). На третьем этапе (60), на основе определения на втором этапе (50), выбирают один из нескольких профилей (22) движения для приводной системы (3) переключателя (8) ступеней нагрузки, на основе которого выполняют переключение. На четвертом этапе (70) переключение выполняют и контролируют посредством приводной системы (3) на основе выбранного профиля (22) движения. 2 н. и 17 з.п. ф-лы, 5 ил.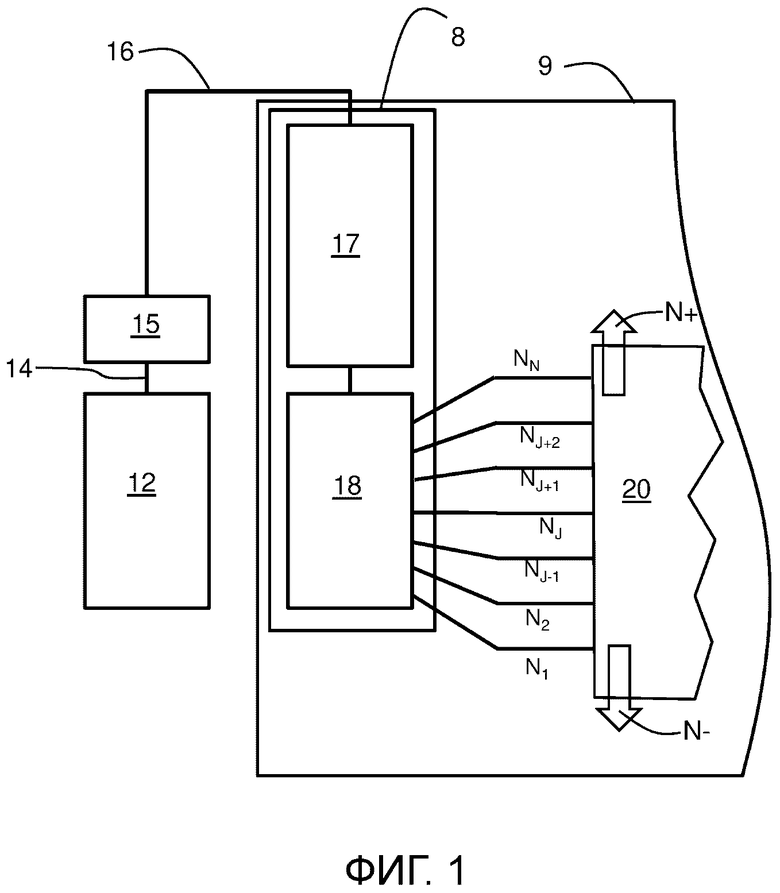
1. Способ выполнения переключения переключателя (8) ступеней нагрузки посредством приводной системы (3), причем приводная система (3) включает в себя по меньшей мере один двигатель (12), который воздействует на приводной вал (16), устройство (2) управления и систему (13) датчиков, которая непосредственно или опосредованно соединена с приводным валом (16);
отличающийся следующими этапами:
- на первом этапе (40) устройством (2) управления принимают сигнал для переключения переключателя (8) ступеней нагрузки;
- на втором этапе (50) посредством устройства (2) управления определяют, было ли выполнено переключение с направления (N+) возрастания или направления (N-) убывания на текущий отвод (NJ), и выполняется ли переключение в направлении (N+) возрастания или направлении (N-) убывания на следующий отвод (NJ+1, NJ-1);
- на третьем этапе (60), на основе определения на втором этапе (50), выбирают один из нескольких профилей (22) движения для приводной системы (3) переключателя (8) ступеней нагрузки, на основе которого выполняют переключение; и
- на четвертом этапе (70) переключение выполняют и контролируют посредством приводной системы (3) на основе выбранного профиля (22) движения.
2. Способ по п. 1, причем несколько профилей (22) движения сохраняют в устройстве (2) управления.
3. Способ по п. 1 или 2, причем первый возможный профиль (22) движения описывает переключение переключателя (8) ступеней нагрузки в направлении (N+) возрастания, причем перед переключением определяют, было ли выполнено переключение с отвода (NJ) на следующий более высокий отвод (NJ+1), и при текущем переключении переключают со следующего более высокого отвода (NJ+1) на следующий еще более высокий отвод (NJ+2).
4. Способ по п. 1 или 2, причем второй возможный профиль (22) движения описывает переключение переключателя (8) ступеней нагрузки в направлении (N-) убывания, причем перед переключением определяют, было ли выполнено переключение с отвода (NJ+2) на следующий более низкий отвод (NJ+1), и при текущем переключении проверяют, выполняется ли переключение со следующего более низкого отвода (NJ+1) на еще более низкий отвод (NJ).
5. Способ по п. 3 или 4, причем посредством профилей (22) движения приводной вал (16) поворачивают на целое кратное 180°.
6. Способ по п. 1, причем третий возможный профиль (22) движения описывает переключение переключателя (8) ступеней нагрузки в направлении (N+) возрастания, причем перед переключением проверяют, было ли выполнено переключение с отвода (NJ+1) на следующий более низкий отвод (NJ), и при текущем переключении проверяют, выполняется ли переключение снова на следующий более высокий отвод (NJ+1) с отвода (NJ) с учетом свободного хода переключателя (8) ступеней нагрузки.
7. Способ по п. 1, причем четвертый возможный профиль (22) движения описывает переключение переключателя (8) ступеней нагрузки в направлении (N-) убывания, причем перед переключением проверяют, было ли выполнено переключение с отвода (NJ+1) на следующий более высокий отвод (NJ+2), и при текущем переключении проверяют, выполняется ли переключение снова на следующий более низкий отвод (NJ+1) с отвода (NJ+2) с учетом свободного хода переключателя (8) ступеней нагрузки.
8. Способ по п. 6 или 7, причем посредством профилей (22) движения приводной вал (16) поворачивают на целое кратное 180° плюс дополнительная величина угла, для того чтобы учитывать свободный ход передаточного механизма (15) переключателя (8) ступеней нагрузки.
9. Способ по п. 1, причем пятый профиль (22) движения выполняется таким образом, что профиль (22) движения от отвода (NJ) к достигаемому первому следующему более высокому отводу (NJ+1) или к первому следующему более низкому отводу (NJ-1) комбинируют по меньшей мере с одним дополнительным профилем (22) движения, для того чтобы достигать по меньшей мере одного дальнейшего следующего более высокого отвода (NJ+X) или по меньшей мере одного дальнейшего следующего более низкого отвода (NJ-X), причем назначение профилей (22) движения осуществляют перед вводом в эксплуатацию приводной системы (3).
10. Способ по любому из пп. 1-9, причем текущий отвод (NJ) определяется устройством (2) управления и служит для выбора необходимого профиля (22) движения.
11. Способ по любому из пп. 1-10, причем каждый профиль (22) движения образован из двух переменных и может представляться в виде полиноминальной функции n-го порядка в двухмерной декартовой системе (21) координат.
12. Способ по любому из пп. 1-11, причем сохраненные профили (22) движения запрашивают из устройства (2) управления или силовой части (11) приводной системы (3).
13. Приводная система (3) для переключателя (8) ступеней нагрузки для выполнения способа по любому из пп. 1-12, включающая в себя:
- приводной вал (16), который соединяет приводную систему (3) с переключателем (8) ступеней нагрузки;
- двигатель (12) для приведения в движение приводного вала (16);
- систему (4) обратной связи, которая выполнена для того, чтобы определять положение приводного вала (16) и на основе этого положения генерировать сигнал обратной связи; и
- устройство (10) управления, которое выполнено для того, чтобы в зависимости от выбранного профиля (22) движения и сигнала обратной связи воздействовать на работу двигателя (12),
отличающаяся тем, что
устройство (10) управления выполнено и сформировано для того, чтобы выполнять этапы по п. 1.
14. Приводная система (3) по п. 13, причем устройство (2) управления включает в себя блок (10) управления и силовую часть (11), причем силовая часть (11) служит для энергоснабжения двигателя (12), и упомянутый по меньшей мере один профиль (22) движения сохранен в памяти (5) силовой части (11), и блок (10) управления выбирает профиль (22) движения, и силовая часть (11) действует на двигатель (12) в соответствии с профилем (22) движения.
15. Приводная система (3) по п. 13 или 14, причем система (4) обратной связи включает в себя систему (13) датчиков, которая выполнена и расположена для того, чтобы регистрировать положение по меньшей мере приводного вала (16).
16. Приводная система (3) по п. 15, причем система датчиков (13) включает в себя датчик абсолютных значений и вспомогательный контакт, которые в комбинации расположены и выполнены для того, чтобы регистрировать абсолютное положение по меньшей мере упомянутого одного приводного вала (16).
17. Приводная система (3) по п. 16, причем датчик абсолютных значений и вспомогательный контакт закреплены непосредственно или опосредованно на валу (14) двигателя, приводном валу (16) или соединенном с ним валу.
18. Приводная система (3) по п. 16, причем датчик абсолютных значений выполнен в виде однооборотного датчика угла поворота, или инкрементального датчика, или виртуального датчика угла поворота, и вспомогательный переключатель выполнен в виде по меньшей мере одного микропереключателя, или резольвера, или датчика sin/cos.
19. Приводная система (3) по любому из пп. 16-18, причем датчик абсолютных значений и вспомогательный контакт выполнены для того, чтобы регистрировать положение приводного вала (16) или положение дополнительного вала посредством сканирования.
| УСТРОЙСТВО ДЛЯ ПОДЖАРИВАНИЯ КОТЛЕТ | 1933 |
|
SU36621A1 |
| WO 2012135209 A1, 04.10.2012 | |||
| ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ ДЛЯ ПЕРЕКЛЮЧАТЕЛЯ ОТВОДОВ ПОД НАГРУЗКОЙ | 2007 |
|
RU2431884C2 |
| US 9412527 B2, 09.08.2016 | |||
| RU 94045928 A1, 10.09.1996. | |||
