Изобретение относится к приводной системе для переключателя и к способу приведения в действие переключателя.
На трансформаторных подстанциях существует множество переключателей для различных задач и с различными требованиями. Для активации соответствующих переключателей они должны приводиться в действие приводной системой. В случае этих переключателях речь идет в частности о переключателях ступеней нагрузки, переключателях ответвлений под нагрузкой, селекторах, двойных реверсивных переключателях, реверсивных переключателях, предварительных селекторах, переключателях мощности, переключателях нагрузки или разъединителях.
Документ WO 2012135209 A1 раскрывает переключатель ступеней нагрузки по принципу реакторного переключения с приводом двигателя. Привод двигателя содержит многооборотный датчик абсолютных значений, который расположен на боковом валу. Кроме того, на самом двигателе закреплено устройство обратной связи („feedback device“), которое может быть выполнено в виде многооборотного датчика абсолютных значений или резольвера.
Документ RU 2431884 C2 описывает отсек привода двигателя в переключателе отводов под нагрузкой. Внутри отсека размещены двигатель, редуктор и датчик положения. Двигатель через редуктор соединен с валом, который приводит в действие переключатель отводов под нагрузкой. Датчик положения расположен на редукторе.
Документ WO 0036621 A1 раскрывает приводное устройство для распределительного устройства среднего или высокого напряжения, в котором привод содержит вращающуюся электрическую машину, функционально соединенную с подвижным контактом.
Документ US 7109670 B1 раскрывает систему привода с устройством для демпфирования скорости и устройством для регулировки скорости привода двигателя.
Так переключатели ступеней нагрузки служат, например, для бесперебойного переключения между различными отводами обмотки электрического оборудования, такого как силовой трансформатор или регулируемый дроссель. Вследствие этого может, например, изменяться коэффициент трансформации трансформатора или индуктивность дросселя. Двойные реверсивные переключатели служат для изменения полярности обмоток во время эксплуатации силового трансформатора.
Все эти переключатели представляют собой имеющий чрезвычайное значение для безопасности компонент электрического оборудования. Переключение происходит во время эксплуатации электрического оборудования и в соответствии с этим, например, при его подключении к энергосети. Неисправности в работе могут иметь в крайних случаях существенные технические и экономические последствия.
Исходя из этого, задача настоящего изобретения состоит в предоставлении улучшенного концепта для приведения в действие переключателя, при помощи которого повышается безопасность эксплуатации.
Эта задача решается с помощью приводной системы по меньшей мере для одного переключателя, которая включает в себя признаки пункта 1 формулы изобретения.
Другая задача изобретения состоит в предоставлении способа приведения в действие по меньшей мере одного переключателя, который предоставляет в распоряжение улучшенный концепт для приведения в действие переключателя, при помощи которого повышается гибкость привода и безопасность при переключении.
Эта задача решается с помощью способа приведения в действие по меньшей мере одного переключателя, который включает в себя признаки пункта 10 формулы изобретения.
Улучшенный концепт основывается на идее оснащать приводной вал для приведения в действие переключателя системой обратной связи, которая может регистрировать по меньшей мере одно значение для положения приводного вала. Воздействие на работу двигателя оказывается на основе сигнала обратной связи, который генерируется в зависимости от значения.
Согласно улучшенному концепту предоставляется приводная система для переключателя. Приводная система имеет приводной вал, который соединяет приводную систему с переключателем, двигатель для приведения в действие приводного вала и систему обратной связи. Система обратной связи выполнена для того, чтобы определять по меньшей мере одно значение для положения приводного вала и на основе по меньшей мере одного значения генерировать сигнал обратной связи. Кроме того, приводная система имеет устройство управления, которое выполнено для того, чтобы в зависимости от сигнала обратной связи воздействовать на работу двигателя.
Согласно по меньшей мере одному варианту осуществления переключатель может быть выполнен в виде переключателя ступеней нагрузки или переключателя ответвлений под нагрузкой или селектора или двойного реверсивного переключателя или реверсивного переключателя или предварительного селектора или переключателя мощности или переключателя нагрузки или разъединителя.
Терминология “значения для положения приводного вала” включает в себя также такие значения измеряемых величин, из которых может однозначно определяться положение приводного вала, при необходимости в пределах диапазона допуска.
Благодаря определению по меньшей мере одного значения для положения приводного вала устройство управления может повышать надежность определения положения и снижать соответствующий остаточный риск ошибочного определения положения.
Согласно по меньшей мере одному варианту осуществления приводная система служит для того, чтобы приводить в действие вал переключателя, например переключателя ступеней нагрузки или соответствующий компонент переключателя ступеней нагрузки. Вследствие этого переключатель ступеней нагрузки побуждается выполнять одну или несколько операций, например выполнять переключение между двумя отводами обмотки оборудования или части переключения, как например переключение нагрузки, приведение в действие селектора, приведение в действие предварительного селектора или приведение в действие двойного реверсивного переключателя.
Согласно по меньшей мере одному варианту осуществления приводной вал непосредственно или опосредованно, в частности через один или несколько передаточных механизмов, соединен с переключателем, в частности с валом переключателя.
Согласно по меньшей мере одному варианту осуществления приводной вал непосредственно или опосредованно, в частности через один или несколько передаточных механизмов, соединен с переключателем ответвлений под нагрузкой, селектором, двойным реверсивным переключателем, реверсивным переключателем, переключателем мощности, переключателем нагрузки или разъединителем, в частности с валом переключателя ответвлений под нагрузкой, селектора, двойного реверсивного переключателя, реверсивного переключателя, переключателя мощности, переключателя нагрузки или разъединителя.
Согласно по меньшей мере одному варианту осуществления приводной вал непосредственно или опосредованно, в частности через один или несколько передаточных механизмов, соединен с двигателем, в частности с валом двигателя.
Согласно по меньшей мере одному варианту осуществления положение, в частности абсолютное положение, вала двигателя соответствует положению, в частности абсолютному положению, приводного вала. То есть из положения вала двигателя можно однозначно делать вывод, при необходимости в пределах диапазона допуска, о положении приводного вала.
Согласно по меньшей мере одному варианту осуществления воздействие включает в себя управление, регулировку, торможение, ускорение или остановку двигателя. Регулировка может включать в себя, например, регулировку положения, регулировку скорости, регулировку ускорения или регулировку крутящего момента. По меньшей мере в случае таких регулировок можно говорить о том, что приводная система представляет собой систему сервопривода.
Согласно по меньшей мере одному варианту осуществления приводная система включает в себя блок контроля, который выполнен для того, чтобы на основе сигнала обратной связи контролировать одну или несколько операций переключателя, переключателя ступеней нагрузки, переключателя ответвлений под нагрузкой, селектора, двойного реверсивного переключателя, реверсивного переключателя, предварительного селектора, переключателя мощности, переключателя нагрузки или разъединителя. Контроль включает в себя в частности контроль в отношении того, правильно ли, в частности в пределах ли предварительно заданных промежутков времени, выполняются отдельные операции или их части.
Согласно по меньшей мере одному варианту осуществления устройство управления включает в себя блок управления и силовую часть для управляемого или регулируемого энергоснабжения двигателя. Блок управления выполнен для управления силовой частью в зависимости от по меньшей мере одного расчетного значения, в частности расчетного значения положения, скорости или ускорения.
Согласно по меньшей мере одному варианту осуществления силовая часть выполнена в виде преобразователя частоты или сервопреобразователя частоты или в виде эквивалентного электронного, в частности полностью электронного, блока для приводных машин.
Согласно различным вариантам осуществления устройство управления включает в себя систему обратной связи полностью или частично.
Согласно по меньшей мере одному варианту осуществления система обратной связи выполнена для того, чтобы устанавливать первое значение для положения приводного вала согласно первому методу.
Согласно по меньшей мере одному варианту осуществления значение для положения приводного вала является значением для абсолютного положения приводного вала.
Согласно по меньшей мере одному варианту осуществления значение для положения приводного вала является инкрементным значением для положения приводного вала или значением для относительного положения приводного вала.
Согласно по меньшей мере одному варианту осуществления система обратной связи выполнена для того, чтобы устанавливать положение ротора двигателя и в зависимости от положения ротора назначать таким образом значение для положения приводного вала.
Согласно по меньшей мере одному варианту осуществления, говоря о положении ротора, речь идет об угловом диапазоне, в котором находится ротор двигателя, при необходимости в комбинации с несколькими полными оборотами ротора.
В зависимости от исполнения, в частности от числа пар полюсов, ротора положение или абсолютное положение вала двигателя может тем самым точно определяться по меньшей мере до 180°, например устройством управления. Благодаря преобразованию одним или несколькими передаточными механизмами достигаемая вследствие этого точность положения приводного вала существенно больше. Оценка устройством управления соответствует в этом случае в некоторой степени функции виртуального датчика. Эта комбинация обозначается также как виртуальный датчик угла поворота (энкодер).
Согласно по меньшей мере одному варианту осуществления система обратной связи включает в себя датчик, который является датчиком абсолютных значений и расположен и выполнен для того, чтобы регистрировать абсолютное положение приводного вала или абсолютное положение дополнительного вала, который соединен с приводным валом, и на основе зарегистрированного положения генерировать по меньшей мере один выходной сигнал. Система обратной связи выполнена для того, чтобы устанавливать значение для положения приводного вала для абсолютного положения на основе по меньшей мере одного выходного сигнала.
Согласно по меньшей мере одному варианту осуществления датчик закреплен непосредственно или опосредованно на валу двигателя, приводном валу или соединенном с ним валу.
Согласно по меньшей мере одному варианту осуществления датчик имеет первый выход для выдачи первого значения для абсолютного положения.
Терминология “датчик” включает в себя как устройства, которые определяют два значения для положения разными способами, так и устройства, которые содержат два отдельных датчика, из которых по меньшей мере один является датчиком абсолютных значений.
Согласно по меньшей мере одному варианту осуществления датчик включает в себя датчик абсолютных значений или многооборотный датчик угла поворота или однооборотный датчик угла поворота.
Согласно по меньшей мере одному варианту осуществления датчик выполнен для того, чтобы регистрировать положение приводного вала или положение дополнительного вала посредством первого способа сканирования.
Согласно по меньшей мере одному варианту осуществления способ сканирования включает в себя оптический, магнитный, емкостной, резистивный или индуктивный способ сканирования.
Согласно по меньшей мере одному варианту осуществления датчик соединен с геометрическим замыканием с приводным валом, валом двигателя или дополнительным валом.
Согласно по меньшей мере одному варианту осуществления датчик соединен дополнительно с силовым или молекулярным замыканием, например посредством клеевого соединения, с приводным валом, валом двигателя или дополнительным валом.
Благодаря соединению с геометрическим замыканием и дополнительно с силовым или молекулярным замыканием улучшается закрепление датчика, и в итоге дополнительно повышается эксплуатационная безопасность.
Согласно дополнительному варианту осуществления система обратной связи выполнена для того, чтобы определять по меньшей мере одно значение для положения приводного вала при помощи датчика и вспомогательного контакта и на основе по меньшей мере одного значения генерировать сигнал обратной связи. При этом датчик и вспомогательный контакт могут создавать в каждом случае отдельное значение, причем значения затем объединяются в одно значение, для того чтобы на основе этого значения генерировать сигнал обратной связи. Кроме того, соответствующее значение датчика и значение вспомогательного контакта, которые в комбинации представляют положение приводного вала, могут непосредственно генерировать общий сигнал обратной связи.
Приводная система имеет устройство управления, которое выполнено для того, чтобы в зависимости от сигнала обратной связи, который основывается на общем значении датчика и вспомогательного контакта или на отдельных в каждом случае значениях, воздействовать на работу двигателя.
Благодаря определению двух значений, из которых определяется положение приводного вала, изобретательская идея может реализовываться при помощи самого разного аппаратного обеспечения. В конечном счете, тем самым повышается эксплуатационная безопасность приводной системы, переключателя и электрического оборудования.
Согласно по меньшей мере одному варианту осуществления система обратной связи выполнена для того, чтобы устанавливать первое значение при помощи датчика согласно первому способу и устанавливать по меньшей мере второе значение при помощи вспомогательного контакта согласно второму способу. Значения объединяются после этого в одно значение.
Способы могут отличаться различными техническими или физическими принципами или различными конструктивными элементами (компонентами аппаратного обеспечения).
Согласно по меньшей мере одному варианту осуществления первое значение датчика для положения приводного вала является первым значением для абсолютного положения приводного вала.
Согласно по меньшей мере одному варианту осуществления второе значение вспомогательного контакта для положения приводного вала является вторым значением для относительного положения приводного вала.
Первое и второе значения образуют значение для абсолютного положения приводного вала.
Согласно по меньшей мере одному варианту осуществления система обратной связи выполнена для того, чтобы устанавливать положение ротора двигателя и определять одно из по меньшей мере двух значений для положения приводного вала в зависимости от положения ротора. При этом система обратной связи имеет датчик, который является так называемым виртуальным датчиком угла поворота.
Согласно по меньшей мере одному варианту осуществления система обратной связи включает в себя датчик и вспомогательный контакт, которые расположены и выполнены для того, чтобы в комбинации регистрировать абсолютное положение приводного вала или абсолютное положение дополнительного вала, который соединен с приводным валом, и на основе зарегистрированного положения генерировать по меньшей мере один выходной сигнал.
Согласно по меньшей мере одному варианту осуществления датчик и вспомогательный контакт непосредственно или опосредованно закреплены на валу двигателя, приводном валу или соединенном с ним валу.
Согласно по меньшей мере одному варианту осуществления датчик имеет первый выход для выдачи первого значения, и вспомогательный контакт имеет второй выход для выдачи второго значения, причем значения образовывают абсолютное положение приводного вала.
Согласно по меньшей мере одному варианту осуществления вспомогательный контакт выполнен для того, чтобы регистрировать положение приводного вала или положение дополнительного вала дополнительно посредством способа сканирования.
Согласно по меньшей мере одному варианту осуществления способ сканирования включает в себя механический, оптический, магнитный, емкостной, резистивный или индуктивный способ сканирования.
Согласно по меньшей мере одному варианту осуществления вспомогательный контакт соединен дополнительно с силовым или молекулярным замыканием, например посредством клеевого соединения, с приводным валом, валом двигателя или дополнительным валом.
Благодаря соединению с геометрическим замыканием и дополнительно с силовым или молекулярным замыканием улучшается закрепление вспомогательного контакта, и в итоге дополнительно повышается эксплуатационная безопасность.
Согласно улучшенному концепту указывается также способ приведения в действие переключателя ступеней нагрузки. Способ включает в себя определение по меньшей мере одного значения для абсолютного положения приводного вала для приведения в действие переключателя ступеней нагрузки, генерирование сигнала обратной связи на основе по меньшей мере одного значения и управление двигателем для приведения в действие переключателя ступеней нагрузки в зависимости от сигнала обратной связи.
Другие варианты осуществления и реализации способа проистекают непосредственно из различных вариантов осуществления системы переключателя ступеней. В частности отдельные или несколько из описанных в отношении системы переключателя ступеней компонентов и/или систем могут быть реализованы для выполнения способа соответствующим образом.
Далее изобретение подробно разъясняется на основе предпочтительных вариантов осуществления со ссылкой на чертеж. Компоненты, которые идентичны или функционально идентичны или обладают идентичным действием, могут быть снабжены идентичными ссылочными позициями. Идентичные компоненты или компоненты с идентичной функцией разъяснены при возможности только на той фигуре, на которой они появляются впервые. Разъяснение не обязательно повторяется на последующих фигурах.
Показаны:
фиг. 1 - схематичное изображение примерного варианта осуществления приводной системы согласно улучшенному концепту; и
фиг. 2 - схематичное изображение дополнительного примерного варианта осуществления приводной системы согласно улучшенному концепту.
Для одинаковых или действующих одинаково элементов изобретения используются идентичные ссылочные позиции. Кроме того, для наглядности на отдельных фигурах изображаются только те ссылочные позиции, которые необходимы для описания соответствующей фигуры. Фигуры изображают лишь примеры осуществления изобретения, не ограничивая, однако, изобретение изображенными примерами осуществления.
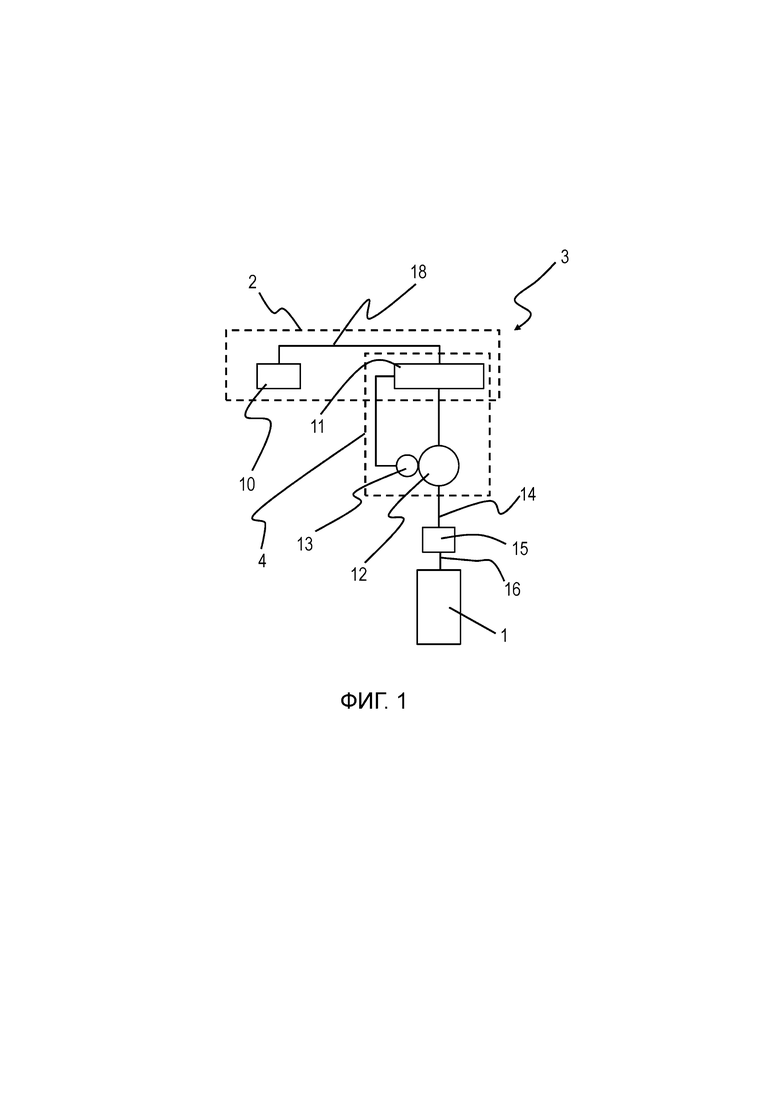
Фиг. 1 показывает схематичное изображение примерного варианта осуществления приводной системы 3 для переключателя 1. Приводная система 3 соединена через приводной вал 16 с переключателем 1. Приводная система 3 содержит двигатель 12, который через вал 14 двигателя и опционально передаточный механизм 15 может приводить в движение приводной вал 16. Устройство 2 управления приводной системы 3 включает в себя силовую часть 11, которая содержит, например, преобразователь частоты (не изображен) для управляемого или регулируемого энергоснабжения двигателя 12, а также блок 10 управления для управления силовой частью 11, например через шину 18. Приводная система 3 имеет датчик 13, который служит в качестве системы 4 обратной связи или является частью системы 4 обратной связи и соединен с силовой частью 11. Далее датчик 13 непосредственно или опосредованно соединен с приводным валом 16.
Датчик 13 выполнен для того, чтобы регистрировать по меньшей мере одно первое значение для положения, в частности углового положения, например абсолютного углового положения приводного вала 16. Для этого датчик 13 может включать в себя, например, датчик абсолютных значений, в частности многооборотный датчик абсолютных значений, который закреплен на приводном валу 16, валу 14 двигателя или на другом валу, положение которого однозначно связано с абсолютным положением приводного вала 16. Например, положение приводного вала 16 может однозначно определяться из положения вала 14 двигателя, например через передаточное отношение передаточного механизма.
Система 4 обратной связи выполнена для того, чтобы регистрировать значение для положения приводного вала 16.
Устройство 2 управления и в частности блок 10 управления и/или силовая часть 11 выполнены для того, чтобы регулировать или управлять двигателем 12 в зависимости от сигнала обратной связи, который генерирует система 4 обратной связи на основе значения.
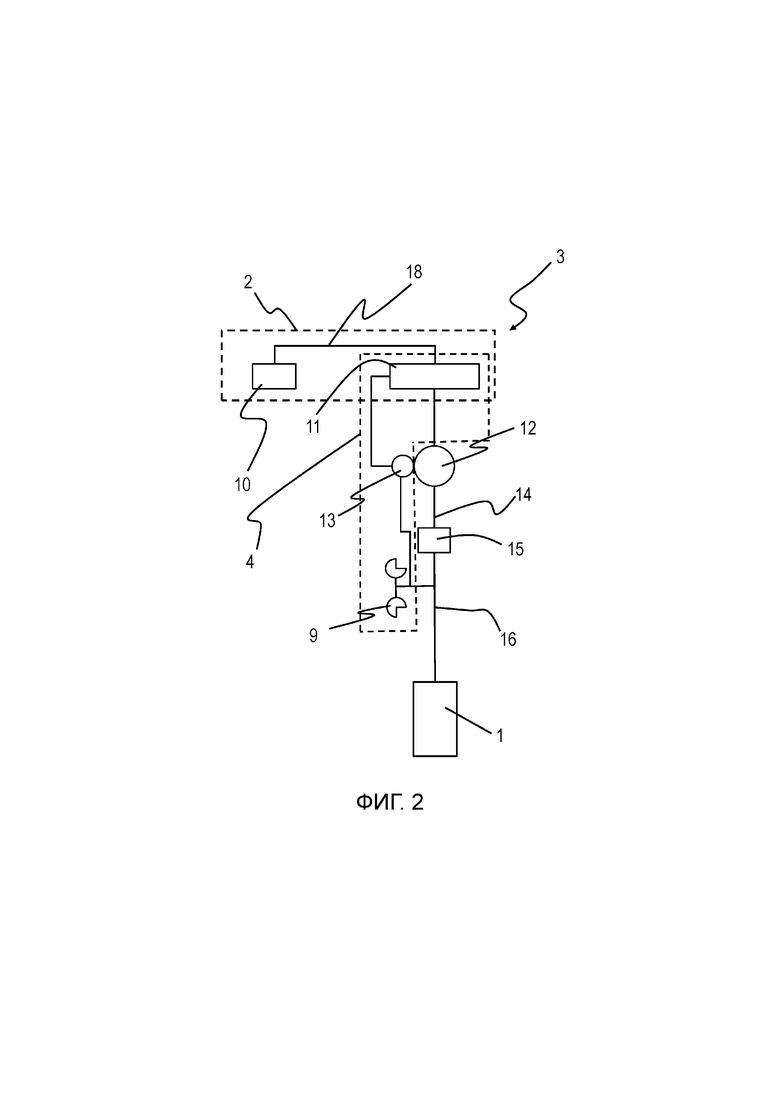
Фиг. 2 показывает дополнительное схематичное изображение примерного варианта осуществления приводной системы 3. Здесь в дополнение к датчику 13, который выполнен в виде датчика абсолютных значений, многооборотного датчика абсолютных значений, однооборотного датчика абсолютных значений или однооборотного датчика угла поворота или инкрементального датчика или виртуального датчика угла поворота, может быть предусмотрен вспомогательный переключатель 9. Приводная система 3 имеет таким образом датчик 13 и вспомогательный переключатель 9, которые служат в качестве системы 4 обратной связи или являются частью системы 4 обратной связи и соединены с силовой частью 11.
Вспомогательный переключатель 9 может быть выполнен в виде по меньшей мере одного микропереключателя или резольвера (вращающегося трансформатора) или датчика sin/cos. Положение приводного вала 16 может однозначно определяться датчиком 13 в соединении с вспомогательным переключателем 9.
Альтернативно или дополнительно устройство 2 управления может быть выполнено для того, чтобы из положения ротора двигателя 12 устанавливать значение для положения приводного вала 16. При этом речь шла бы об уже упомянутом датчике 13, который выполнен в виде виртуального датчика угла поворота.
Для этого может использоваться, например, индуктивная обратная связь из-за движения ротора в обмотках двигателя 12. Так как сила обратной связи периодически меняется, положение ротора может приблизительно определять в частности при помощи анализа сигналов, например анализа быстрого преобразования Фурье (БПФ). Так как полный оборот приводного вала 16 соответствует множеству оборотов ротора, из этого со значительно более высокой точностью может делаться вывод о положении приводного вала 16. Дополнительно вспомогательный переключатель 9 может дополнять определение положения приводного вала 16.
Устройство 2 управления, в частности блок 10 управления и/или силовая часть 11, выполнено для того, чтобы регулировать или управлять двигателем 12 в зависимости от сигнала обратной связи, который генерирует система 4 обратной связи на основе значения. В зависимости от исполнения значение создается выходным сигналом датчика 13 или выходным сигналом датчика 13 в сочетании с вспомогательным переключателем 9.
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ
1 переключатель
2 устройство управления
3 приводная система
4 система обратной связи
9 вспомогательный контакт
10 блок управления
11 силовая часть
12 двигатель
13 датчик
14 вал двигателя
15 передаточный механизм
16 приводной вал
18 шина
Изобретение относится к электротехнике. Технический результат заключается в повышении надежности работы переключателя. Приводная система (3) для переключателя (17) включает в себя приводной вал (16), который соединяет приводную систему (3) с переключателем (17), а также двигатель (12) для приведения в движение приводного вала (16) и систему (4) обратной связи, которая выполнена для того, чтобы определять по меньшей мере одно значение для положения приводного вала (16) и на основе упомянутого по меньшей мере одного значения генерировать сигнал обратной связи. Кроме того, она содержит устройство (2) управления, которое выполнено для того, чтобы в зависимости от сигнала обратной связи воздействовать на работу двигателя (12). Система (4) обратной связи включает в себя по меньшей мере один датчик (13), выполненный в виде однооборотного датчика угла поворота, и вспомогательный контакт (9), которые в комбинации выполнены и расположены для того, чтобы регистрировать абсолютное положение приводного вала (16) или абсолютное положение дополнительного вала, который соединен с приводным валом (16), и на основе зарегистрированного положения генерировать по меньшей мере один первый выходной сигнал. И выполнена для того, чтобы определять значение для положения приводного вала (16) на основе упомянутого по меньшей мере первого выходного сигнала. 2 н. и 3 з.п. ф-лы, 2 ил.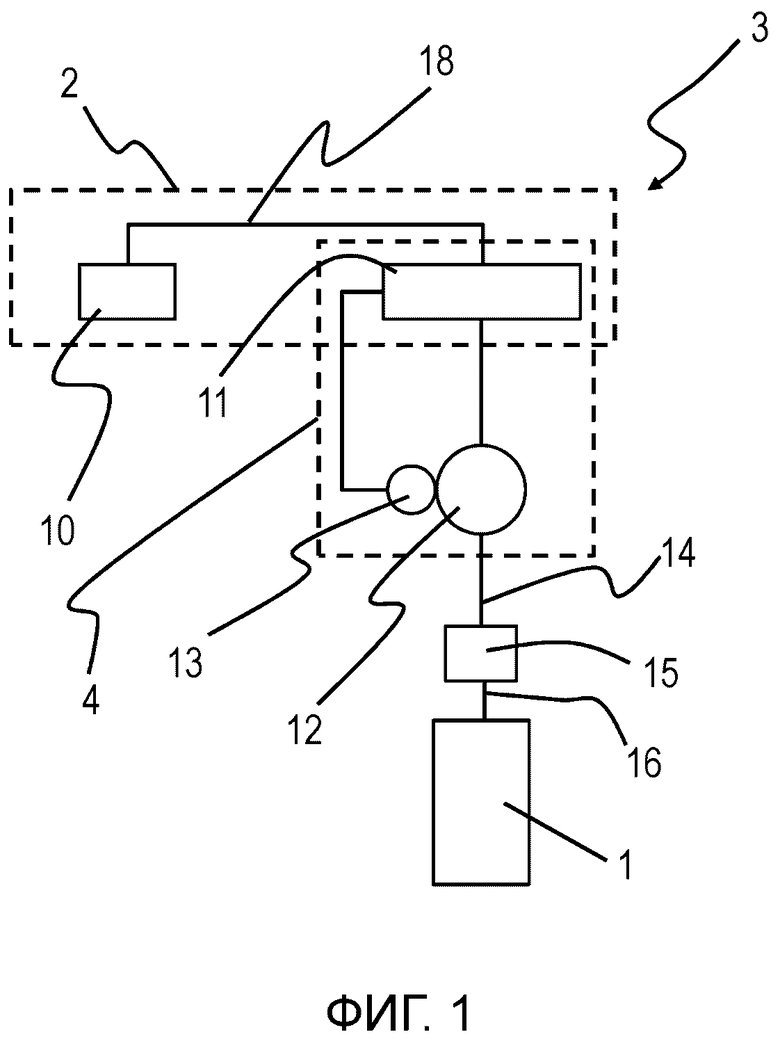
1. Приводная система (3) для переключателя (17), приводная система (3) включает в себя
- приводной вал (16), который соединяет приводную систему (3) с переключателем (17);
- двигатель (12) для приведения в движение приводного вала (16);
- систему (4) обратной связи, которая выполнена для того, чтобы определять по меньшей мере одно значение для положения приводного вала (16) и на основе упомянутого по меньшей мере одного значения генерировать сигнал обратной связи; и
- устройство (2) управления, которое выполнено для того, чтобы в зависимости от сигнала обратной связи воздействовать на работу двигателя (12);
причем
- система (4) обратной связи включает в себя по меньшей мере один датчик (13), выполненный в виде однооборотного датчика угла поворота, и вспомогательный контакт (9), которые в комбинации выполнены и расположены для того, чтобы регистрировать абсолютное положение приводного вала (16) или абсолютное положение дополнительного вала, который соединен с приводным валом (16), и на основе зарегистрированного положения генерировать по меньшей мере один первый выходной сигнал; и выполнена для того, чтобы определять значение для положения приводного вала (16) на основе упомянутого по меньшей мере первого выходного сигнала.
2. Приводная система (3) по п. 1, причем значение для положения приводного вала (16) является значением для абсолютного положения приводного вала (16).
3. Приводная система (3) по п. 1 или 2, причем вспомогательный контакт (9) выполнен в виде по меньшей мере одного микропереключателя или резольвера.
4. Приводная система (3) по любому из пп. 1-3, причем переключатель (17) является переключателем ступеней нагрузки, или переключателем ответвлений под нагрузкой, или селектором нагрузки, или селектором, или реверсивным переключателем, или двойным реверсивным переключателем, или предварительным селектором, или переключателем мощности, или переключателем нагрузки, или разъединителем.
5. Способ приведения в действие переключателя (17) при помощи приводной системы (3) по любому из пп. 1-4, способ включает в себя:
- определение по меньшей мере одного значения для абсолютного положения приводного вала (16) для приведения в действие переключателя (17);
- генерирование сигнала обратной связи на основе упомянутого по меньшей мере одного значения; и
- управление двигателем (12) для приведения в действие переключателя (17) в зависимости от сигнала обратной связи.
| WO 2012135209 A1, 04.10.2012 | |||
| US 7109670 B1, 19.09.2006 | |||
| УСТРОЙСТВО ДЛЯ ПОДЖАРИВАНИЯ КОТЛЕТ | 1933 |
|
SU36621A1 |
| ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ ДЛЯ ПЕРЕКЛЮЧАТЕЛЯ ОТВОДОВ ПОД НАГРУЗКОЙ | 2007 |
|
RU2431884C2 |
| RU 94045928 A1, 10.09.1996. | |||
