Изобретение относится к способу выполнения переключения переключателя при помощи приводной системы.
Кроме того, изобретение относится к приводной системе для переключателя, которая включает в себя по меньшей мере один двигатель, который воздействует на приводной вал.
Привод для переключателя ступеней нагрузки известен, например, из германского описания полезной модели DE 20 2010 011 521 U1. Этот привод переключателя ступеней нагрузки имеет двигатель, который системой рычагов жестко соединен с соответствующими переключателями ступеней нагрузки. Приведение в действие двигателя осуществляется при помощи проводки, другими словами посредством приведения в действие контакторов двигателя, которые включают или выключают двигатель. Через приводной вал переключатели ступеней нагрузки приводятся затем в действие. После сборки переключателя, в приводе могут выполняться всего лишь небольшие изменения. Вследствие этого привод становится жестким и негибким. Даже простейшие адаптации требуют сложных мер по перестройке.
Переключатели ступеней нагрузки используются, как правило, для регулировки напряжения в различных трансформаторах. Для приведения в действие переключателя ступеней нагрузки применяется приводная система. При этом расположенный на корпусе трансформатора двигатель соединен через передаточный механизм с переключателем ступеней нагрузки. Посредством приведения в действие электромеханических контакторов двигатель снабжается энергией. В зависимости от проводки двигатель приводится в действие таким образом, что его приводной вал вращается либо в одном, либо в другом направлении. Перед переключением при этом не выполняется проверка текущего положения или соответственно положения переключателя ступеней нагрузки. Всегда предполагается, что переключатель ступеней нагрузки не изменял с момента последнего переключения своего положения.
Исходя из этого, задача настоящего изобретения заключается в предоставлении способа переключения переключателя, посредством которого переключение с одного положения переключения на следующее положение переключения выполняется всегда точно, для того чтобы улучшать надежность при переключении и делать его более безопасным.
Эта задача решается с помощью способа выполнения переключения переключателя с текущего положения переключения на целевое положение переключения, который включает в себя признаки пункта 1 формулы изобретения.
Далее задача изобретения заключается в предоставлении приводной системы для переключателя для выполнения переключения с текущего положения переключения на целевое положение переключения, которая обеспечивает точное и надежное переключение с одного положения переключения на следующее положение переключения.
Эта задача решается с помощью приводной системы для выполнения переключения переключателя с текущего положения переключения на целевое положение переключения, которая включает в себя признаки пункта 8 формулы изобретения.
Соответствующий изобретению способ выполнения переключения переключателя с текущего положения переключения на целевое положение переключения при помощи приводной системы отличается тем, что сначала принимается сигнал переключения приводной системой от устройства управления. После этого определяется по меньшей мере одно значение первого положения приводного вала приводной системы при помощи сигнала обратной связи системы обратной связи. Таким же образом определяется значение второго положения приводного вала на основе достигаемого целевого положения переключения переключателя устройством управления. Осуществляется установление разницы между значением первого положения и значением второго положения приводного вала устройством управления. Наконец, осуществляется воздействие устройства управления в зависимости от сигнала обратной связи на двигатель, пока не будет достигнуто значение второго положения приводного вала, и таким образом не будет завершено переключение с текущего положения переключения на целевое положение переключения.
Соответствующий изобретению способ имеет то преимущество, что вследствие этого переключение с текущего положения переключения на целевое положение переключения может выполняться надежным образом. Также при помощи соответствующего изобретению способа могут учитываться изменения во времени приводной системы для переключателя.
Согласно одному из возможных вариантов осуществления изобретения после определения по меньшей мере одного значения для первого положения приводного вала при текущем положении переключения, это значение первого положения приводного вала может сравниваться со значением положения приводного вала достигнутого последним (последнего занимаемого) целевого положения переключения. Достигнутое последним целевое положение переключения соответствует текущему положению переключения, с которого должно выполняться переключение. Если теперь устанавливается, что значение первого положения приводного вала для текущего положения переключения и значение положения приводного вала достигнутого последним целевого положения переключения не совпадают, то устройство управления воздействует в зависимости от сигнала обратной связи на двигатель, пока не будет достигнуто значение положения приводного вала достигнутого последним положения переключения.
Равным образом согласно дальнейшему варианту осуществления способа возможно, что после определения значения для первого положения приводного вала при помощи сигнала обратной связи системы обратной связи проверяется, находится ли первое положение в предварительно заданном диапазоне допуска. Диапазон допуска может включать в себя несколько положений приводного вала вокруг текущего положения переключения.
Предпочтительно переключение переключателя с текущего положения переключения на целевое положение переключения выполняется таким образом, что шаг переключения имеет значение +1 или -1. Это означает, что переключение осуществляется на следующее более низкое или следующее более высокое положение переключения.
Положение приводного вала регистрируется системой датчиков, которая является частью системы обратной связи. Система датчиков непосредственно или опосредованно соединена с приводным валом. В памяти устройства управления может сохраняться соотнесение положений переключения переключателя и значений для положения приводного вала.
Соответствующая изобретению приводная система для переключателя для выполнения переключения с текущего положения переключения на целевое положение переключения отличается тем, что предусмотрен приводной вал, который соединяет приводную систему с переключателем. Двигатель служит для приведения в движение приводного вала. Устройство управления генерирует сигналы переключения для приводной системы. Система обратной связи, которая функционально соотнесена с приводным валом и соединена с силовой частью приводной системы, выполнена для того, чтобы определять значение первого положения приводного вала приводной системы. На основе этого положения может генерироваться сигнал обратной связи. Блок управления устройства управления, который соединен с силовой частью, выполнен для того, чтобы в зависимости от сигнала переключения и сигнала обратной связи приводить в действие двигатель, пока не будет достигнуто целевое положение переключения.
Согласно возможному варианту осуществления изобретения блок управления или устройство управления включает в себя память. Силовая часть служит для энергоснабжения двигателя. В памяти сохранено соотнесение положений переключения переключателя и значений для положения приводного вала.
Система обратной связи включает в себя систему датчиков, которая непосредственно или опосредованно соединена с приводным валом. Система датчиков может быть датчиком абсолютных значений, многооборотным датчиком абсолютных значений, однооборотным датчиком угла поворота, виртуальным датчиком угла поворота или виртуальным датчиком угла поворота по меньшей мере с одним вспомогательным контактом.
Улучшенный концепт основывается на той идее, что перед приведением в действие переключателя, то есть после получения сигнала переключения, на основе положения приводного вала проверяется, где он находится и соответственно перемещался ли с момента последнего переключения. Таким образом, проверяется, перемещался ли переключатель между последним переключением и последующим переключением с достигнутого последним положения. При этом предполагается не столько то, что переключатель между делом переключился с определенного положения на другое определенное положение, например положение ступени, сколько то, переместились ли механические части на несколько градусов, например из-за вибраций. После определения значения для положения приводного вала устанавливается значение для второго положения приводного вала. Второе значение соотнесено с определенным положением переключателя. В случае переключателя ступеней нагрузки значение для второго положения приводного вала соответствует положению ступени переключателя ступеней нагрузки. После определения разницы значений, другими словами дистанции между текущим положением и достигаемым положением, устройство управления воздействует на двигатель, пока приводной вал не достигнет второго положения. Контроль осуществляется при помощи системы обратной связи.
На основе приложенных чертежей изобретение и его преимущества разъясняются теперь более подробно посредством примеров осуществления, не ограничивая при этом изобретение показанным примером осуществления. Соотношения размеров на фигурах не всегда соответствуют реальным соотношениям размеров, так как некоторые формы упрощены, а другие формы изображены для лучшей наглядности в увеличенном виде по отношению к другим элементам.
На чертеже показаны:
фиг. 1 - схематичное изображение варианта осуществления переключателя с приводной системой согласно изобретению;
фиг. 2 - схематичное изображение переключателя с отдельными положениями переключения, которые могут достигаться при помощи двигателя;
фиг. 3 - схематичное изображение различных положений движения приводного вала, для того чтобы попадать с одного положения переключения на следующее;
фиг. 4 - схематичное изображение возможного варианта осуществления части системы датчиков, при помощи которой могут регистрироваться положения приводного вала;
фиг. 5 - последовательность этапов способа для приведения в действие переключателя, в частности переключателя ступеней нагрузки, согласно изобретению; и
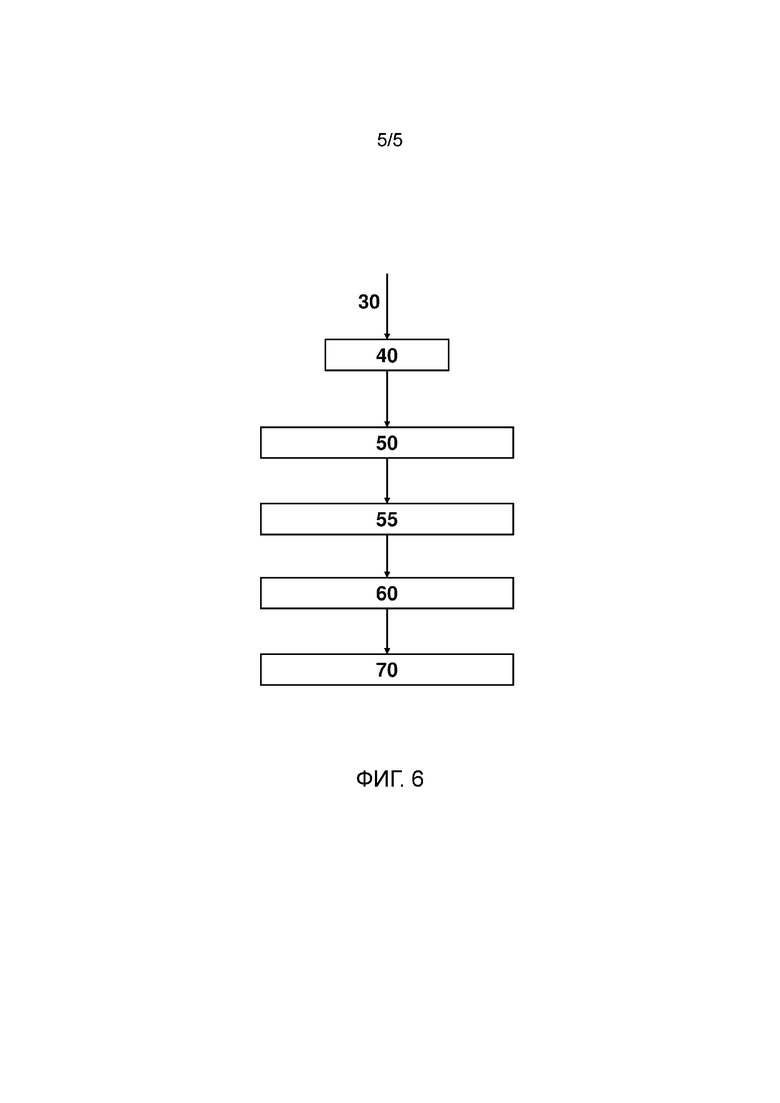
фиг. 6 - дальнейшая последовательность этапов способа для приведения в действие переключателя, в частности переключателя ступеней нагрузки, согласно изобретению.
Для одинаковых или действующих одинаково элементов изобретения используются идентичные ссылочные позиции. Кроме того, для наглядности на отдельных фигурах изображаются только те ссылочные позиции, которые необходимы для описания соответствующей фигуры.
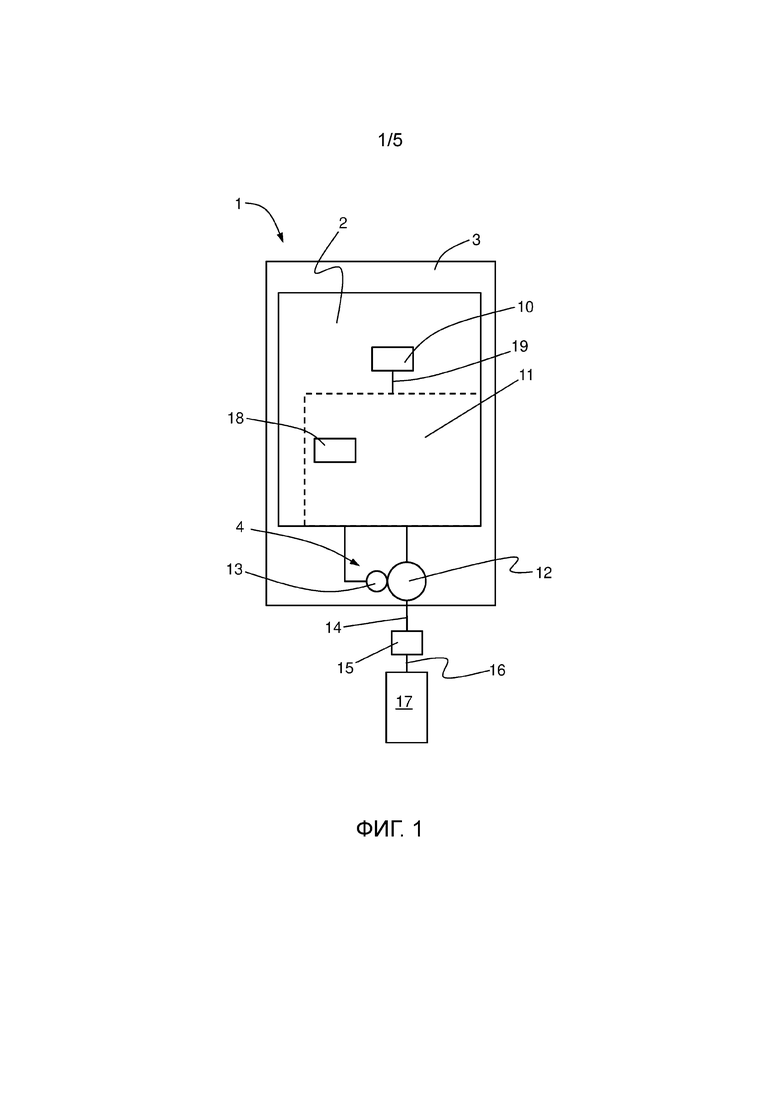
Фиг. 1 показывает схематичное изображение примерного варианта осуществления системы 1 переключения с переключателем 17 и приводной системой 3, которая через приводной вал 16 соединена с переключателем 17. При помощи этой приводной системы 3 создаются условия для соответствующего изобретению способа выполнения переключения. Переключатель 17 может быть переключателем ступеней нагрузки, переключателем отводов под нагрузкой, селектором, двойным реверсивным переключателем, реверсивным переключателем, предварительным селектором, переключателем мощности, переключателем нагрузки или разъединителем. Приводная система 3 включает в себя двигатель 12, который через вал 14 двигателя и опционально через передаточный механизм 15 может приводить в действие приводной вал 16. Устройство 2 управления приводной системы 3 включает в себя силовую часть 11, которая содержит, например, преобразователь частоты (не показан) для управляемого или регулируемого энергоснабжения двигателя 12, а также блок 10 управления для управления силовой частью 11, например через шину 19. Приводная система 3 имеет систему 4 обратной связи, которая функционально соотнесена с приводным валом 16. Система 4 обратной связи может быть системой 13 датчиков. Равным образом система 13 датчиков может быть частью системы 4 обратной связи. Система 4 обратной связи или система 13 датчиков соединена с силовой частью 11. Далее система датчиков 13 непосредственно или опосредованно соединена с приводным валом 16.
Система 13 датчиков выполнена для того, чтобы регистрировать первое значение для положения PI, как например углового положения, в частности абсолютного углового положения приводного вала 16. Для этого система 13 датчиков может включать в себя, например, датчик абсолютных значений, в частности многооборотный датчик абсолютных значений, однооборотный датчик угла поворота, который закреплен на приводном валу 16, валу 14 двигателя или на другом валу, положение которого однозначно связано с положением P1, P2,…, PH приводного вала 16. Например, положение P1, P2,…, PH приводного вала 16 может однозначно определяться из положения вала 14 двигателя, например через передаточное отношение передаточного механизма 15. Далее система 13 датчиков может включать в себя виртуальный датчик угла поворота, который определяет положение вала 14 двигателя и из него выводит положение P1, P2,…, PH приводного вала 16.
Система 4 обратной связи выполнена для того, чтобы регистрировать значение для положения P1, P2,…, PH приводного вала 16. В случае системы датчиков 13, которая выполнена в виде многооборотного датчика абсолютных значений или однооборотного датчика угла поворота, значение для положения приводного вала 16 предоставляется в распоряжение в виде протокола.
При исполнении системы датчиков 13 в виде виртуального датчика угла поворота значение для положения P1, P2,…, PH приводного вала 16 определяется из положения ротора двигателя 12. Для этого может использоваться, например, индуктивная обратная связь посредством движения ротора в обмотках двигателя 12. Так как сила обратной связи периодически изменяется, положение ротора может приблизительно определяться, в частности при помощи анализа сигналов, например посредством анализа быстрого преобразования Фурье (БПФ). Так как полный оборот приводного вала 16 соответствует множеству оборотов ротора, из этого со значительно более высокой точностью может делаться вывод о положении P1, P2,…, PH приводного вала 16.
Система 13 датчиков может быть также выполнена в виде комбинации из виртуального датчика угла поворота и вспомогательного контакта, который непосредственно или опосредованно соединен с приводным валом 16. Значение для положения P1, P2,…, PH приводного вала 16 образуется в этом случае из сигналов виртуального датчика угла поворота и вспомогательного контакта.
Устройство 2 управления, в частности блок 10 управления и/или силовая часть 11, выполнено для того, чтобы регулировать или управлять двигателем 12 в зависимости от сигнала обратной связи, который генерирует система 4 обратной связи на основе значения.
Устройство 2 управления, например блок 10 управления, использует значение для положения P1, P2,…, PH приводного вала 16 для определения положения переключателя 17. Значение для положения P1, P2,…, PH приводного вала 16 может указываться в виде диапазона или соответственно допуска. Это позволяет повышать точность приводной системы 3 или улучшать надежность переключения между текущим положением SJ переключения и целевым положением SJ+K переключения.
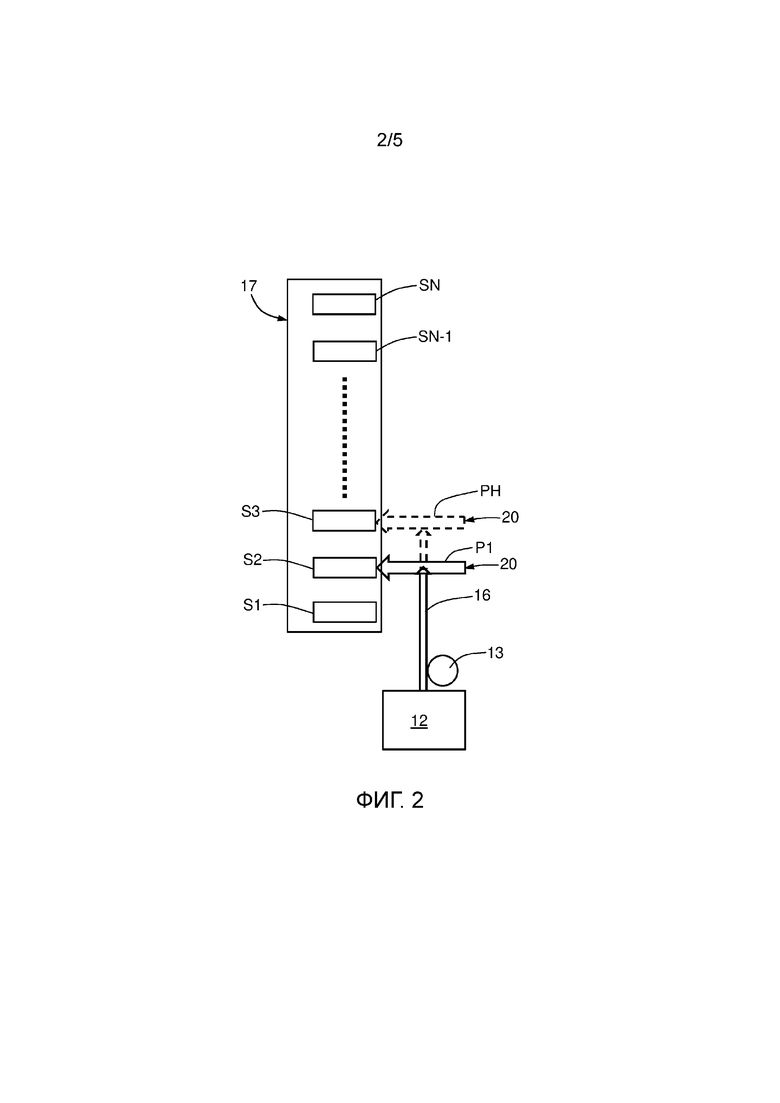
Фиг. 2 показывает схематичное изображение переключателя 17 с отдельными положениями S1, S2,…, SN переключения, которые могут достигаться при помощи двигателя 12. С приводным валом 16 соотнесена система 13 датчиков. В описанном здесь варианте осуществления система 13 датчиков непосредственно соотнесена с приводным валом 16. При приведении в действие двигателя 12 блоком 10 управления, в сочетании с силовой частью 11, в переключателе 17 происходит переключение с, как здесь показано, положения S2 переключения на положение S3 переключения. На фиг. 2 изображена идеальная исходная ситуация, благодаря тому, что контакт 20 для положения S2 переключения имеет положение P1 приводного вала 16. Благодаря приведению в действие двигателя 12 приводной вал 16 проходит положения P2 до PH-1 и в конце приведения в действие двигателя 12 достиг положения PH, которое соответствует целевому положению S2 переключения. Контакт 20 находится после произошедшего переключения в электрическом соединении с положением S3 переключения. Положение PH приводного вала 16 таким образом однозначно соответствует контакту 20 с положением S3 переключения. Для каждого переключения с одного положения SJ переключения на следующее более высокое положение SJ+1 переключения или следующее более низкое положение SJ-1 переключения определяются для приводного вала 16 системой 13 датчиков множество положений P1, P2,…, PH. Если это множество положений P1, P2,…, PH было определено системой 13 датчиков, ясно, что, например, было однозначно и надежно произведено переключение с положения SJ переключения на следующее более высокое положение SJ+1 переключения.
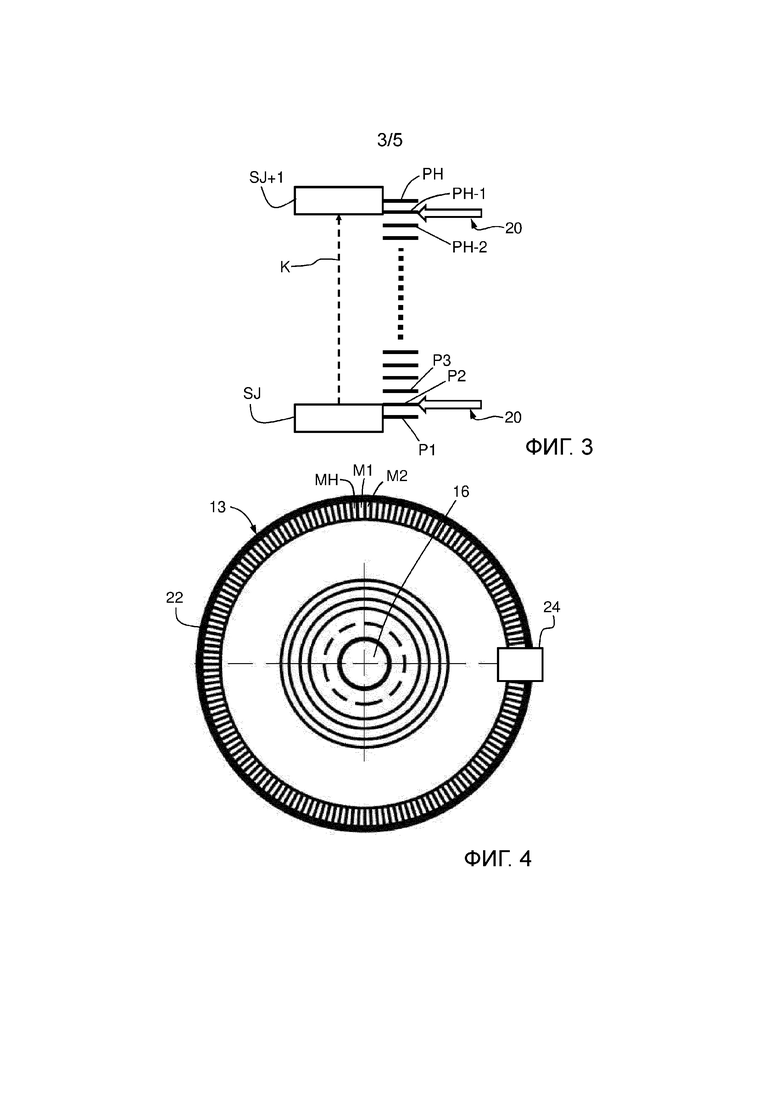
Фиг. 3 показывает схематичное изображение различных положений P1, P2,…, PH, к которым должен перемещаться приводной вал 13, для того чтобы попадать с одного положения SJ переключения на следующее положение SJ+1 переключения (целевое положение переключения). В изображенной здесь исходной ситуации положение P2 приводного вала 13 не находится в исходном положении P1 при положении SJ переключения. В этой ситуации после получения сигнала переключения приводной системой 3 происходит определение по меньшей мере одного значения первого положения P2 приводного вала 16 приводной системы 3. Определение этого положения P2 осуществляется при помощи сигнала обратной связи системы 4 обратной связи или системы 13 датчиков. Также определяется значение второго положения PH приводного вала 16, причем это значение положения PH приводного вала 16 соответствует достигаемому положению SJ+1 переключения (целевому положению переключения) переключателя 17. Переключение с положения SJ переключения на положение SJ+1 переключения происходит с шагом K переключения, который равен в этом случае 1.
Исходя из этого, может определяться разница между значением первого положения P2 и значением второго положения PH приводного вала 16 устройством 2 управления. Затем устройство 2 управления воздействует в зависимости от сигнала обратной связи на двигатель 12, пока не будет достигнуто значение второго положения PH приводного вала 16, другими словами положение SJ+1 переключения (целевое положение переключения).
Согласно изображенной на фиг. 3 ситуации переключение с положения SJ переключения на положение SJ+1 переключения (целевое положение переключения) может достигаться при помощи второй возможности. Определяется значение для первого положения P2 приводного вала 16 при текущем положении SJ переключения. Это значение первого положения P2 приводного вала 16 сравнивается со значением положения PH приводного вала 16 достигнутого последним целевого положения SJ переключения. Если значение первого положения P2 приводного вала 16 для текущего положения SJ переключения и значение положения PH приводного вала 16 достигнутого последним положения SJ переключения (целевого положения SJ+K переключения) не совпадают, что имеет место в данном случае, устройство 2 управления воздействует в зависимости от сигнала обратной связи на двигатель 12, пока не будет достигнуто значение положения PH приводного вала 16 достигнутого последним положения SJ переключения. Для изображенного здесь случая это означает, что двигатель 12 приводится в движение в противоположном направлении, пока не будет достигнуто положение P1 приводного вала 16 текущего положения SJ переключения, соответствующее положению PH приводного вала 16 достигнутого последним положения SJ переключения, например при переключении с положения SJ-1 переключения на положение SJ переключения (целевое положение SJ+K переключения). Затем положения P1, P2,…, PH могут проходиться, пока не будет достигнуто положение SJ+1 переключения (целевое положение SJ+K переключения).
Фиг. 4 показывает схематичное изображение возможного варианта осуществления части системы 13 датчиков, при помощи которой могут регистрироваться положения P1, P2,…, PH приводного вала 16 во время переключения. Система 13 датчиков является в изображенном здесь варианте осуществления диском 22 энкодера, который неподвижно соединен с приводным валом 16. С диском 22 энкодера соотнесен датчик 24, который может регистрировать множество расположенных по периметру диска 22 энкодера и идентичных меток M1, M2,…, MH. Метки M1, M2,…, MH соответствуют положениям P1, P2,…, PH приводного вала 16.
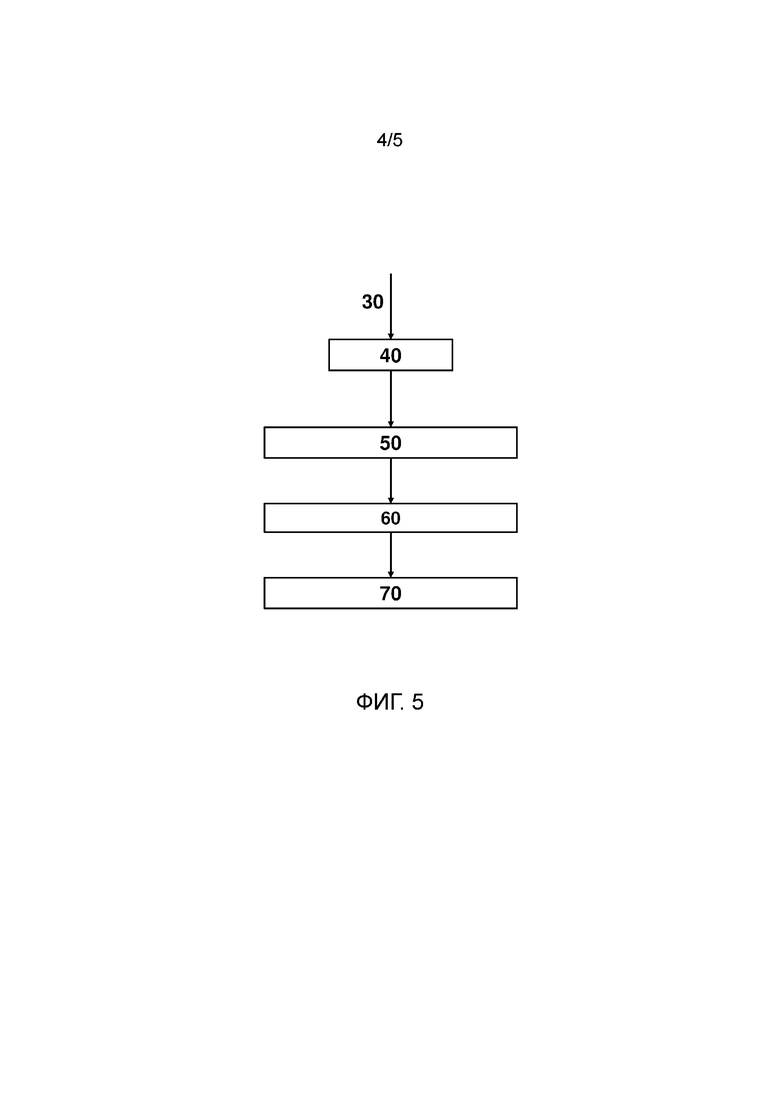
Фиг. 5 показывает последовательность этапов способа для выполнения переключения системы переключения с приводной системой 3 и переключателем 17. Исходя из переключателя 17, который выполнен здесь в качестве примера в виде переключателя ступеней нагрузки, теперь описывается способ. Тем не менее переключатель 17 может быть также выполнен в виде переключателя ответвлений под нагрузкой, селектора, предварительного селектора, двойного реверсивного переключателя или реверсивного переключателя.
На первом этапе 40 сначала подается на устройство 2 управления сигнал 30 для “переключения”. Этот сигнал 30 создается регулятором напряжения, системой контроля или посредством ручного ввода данных (здесь не изображено). То есть переключатель ступеней нагрузки должен, например, приводиться в действие, для того чтобы адаптировать тем самым напряжение ступенчатого трансформатора. Однако возможны также юстировочные движения переключателя ступеней нагрузки во время технического обслуживания, при котором достигаются различные положения S1, S2,…, SN переключения.
В устройстве 2 управления затем на следующем этапе 50 определяется, в каком положении S1, S2,…, SN переключения находится переключатель ступеней нагрузки. Для этого силовой частью 11 запрашивается значение для положения P1, P2,…, PH приводного вала 16. Это осуществляется через систему 4 обратной связи. В зависимости от исполнения, системой датчиков 13 при помощи многооборотного датчика абсолютных значений или однооборотного датчика угла поворота, которые непосредственно закреплены на приводном валу 16, или виртуальным датчиком угла поворота, который использует, например, индуктивную обратную связь из-за движения ротора в обмотках двигателя 12, значение передается на силовую часть 11 и запрашивается устройством 2 управления.
В лучшем случае определенное устройством 2 управления значение соответствует значению, которое соотнесено с определенным положением S1, S2,…, SN переключения или ступенью переключателя ступеней нагрузки.
На следующем этапе 60 определяется следующее достигаемое положение SJ+1 переключения или ступень и таким образом значение для его положения PH приводного вала 16. Достигаемое положение SJ+1 переключения или ступень задается сигналом 30 для переключения.
На последующем этапе 70 вычисляется разница между значениями текущего положения P1 приводного вала 16 или положения, в лучшем случае положение ступени, и достигаемого положения PH приводного вала 16. Разница представляет собой идеальное значение, которое приводной вал 16 должен достигнуть за счет вращения. Другими словами разница является преодолеваемой приводным валом 16 дистанцией, она передается в качестве целевой установки.
Устройство 2 управления воздействует в зависимости от сигнала обратной связи на двигатель 12, пока не будет достигнуто достигаемое положение PH приводного вала 16 и тем самым достигаемое положение или положение ступени.
Альтернативно, как показано на фиг. 6, возможно, что после этапа 50, то есть после определения текущего положения P1 приводного вала 16, контакт 20 перемещается в положение PH. Это не всегда необходимо. Может, например, случаться, что контакт 20 и таким образом соединенный с ним приводной вал 16 сместились из-за вибраций из положения P1, которое соответствует одному из положений S1, S2,…, SN переключения. Значение положения PH приводного вала 16, которое система 4 обратной связи передает на силовую часть 11 и тем самым на блок 10 управления, не совпадает со значением для положения P1 приводного вала 16 и c достигнутым последним положением SJ переключения (переключение с положения SJ-1 переключения на положение SJ переключения). Таким образом, на этапе 55 происходит, если необходимо, такая корректировка положения PH приводного вала 16, что принимается достигнутое последним положение SJ переключения и таким образом соответствующее значение для положения P1 приводного вала 16. Далее способ продолжается, как описано на фиг. 5, последующим этапом 60. Другими словами проверяется, находится ли приводной вал 16 там, где он должен был бы находиться после последнего переключения, и, если необходимо, он перемещается в положение P1 приводного вала 16, то есть возвращается в “правильную” исходную точку.
Благодаря описанному определению положения и соответствующим выравниваниям уменьшается риск ошибочного переключения.
Устройство 2 управления, в частности блок 10 управления, имеет память 18, в которой для каждого определенного положения (S1, S2,…, SN) переключения переключателя 17, в частности ступени переключателя ступеней нагрузки, соотнесено значение для положения приводного вала 16.
Профиль движения задает расчетное значение, которое должен выполнять приводной вал 16. При выполнении профиля движения фактическое значение, которое регистрируется системой 4 обратной связи, может иметь отклонение от расчетного значения. В зависимости от заданного возможного отклонения фактического значения от расчетного значения воздействие на двигатель 12 может либо прерываться, либо продолжаться.
Альтернативно после определения положения P1, P2,…, PH приводного вала 16 может проверяться, находится ли выявленное значение в так называемом диапазоне допуска. Этот диапазон допуска может быть соотнесен с определенным положением P1, P2,…, PH приводного вала 16 или соответственно положением ступени и определяться. Диапазон допуска включает в себя, например, несколько положений, например положения P1-P5 вокруг соответствующего положения S1, S2,…, SN переключения. Выбранный диапазон допуска зависит от всей системы. Кроме того, диапазон допуска позволяет выполнять изобретательский способ при помощи менее точных компонентов/аппаратного обеспечения. Если значение находится в диапазон допуска, корректировка, представленная на этапе 55, не требуется.
Так как с каждым положением S1, S2,…, SN переключения или ступенью может согласовываться диапазон допуска, также второе значение положения PH приводного вала 16, то есть достигаемое положение переключения или ступень, может находиться в диапазоне допуска. Также это позволяет использовать менее точные компоненты/аппаратное обеспечение.
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ
1 система переключения
2 устройство управления
3 приводная система
4 система обратной связи
10 блок управления
11 силовая часть
12 двигатель
13 система датчиков
14 вал двигателя
15 передаточный механизм
16 приводной вал
17 переключатель
18 память
19 шина
20 контакт
22 диск энкодера
24 датчик
30 сигнал
40 этап способа
50 этап способа
55 этап способа
60 этап способа
70 этап способа
K шаг переключения
M1, M2,…, MH метка
P1, P2,…, PI,…, PH положение приводного вала, вала двигателя
S1, S2,…, SJ,…, SH положение переключения.
Изобретение относится к способу выполнения переключения переключателя при помощи приводной системы и к соответствующей системе. Технический результат заключается в обеспечении надежного переключения и, как следствие, в обеспечении безопасного переключения. Способ выполнения переключения переключателя (17) и приводная система (3) для переключателя (17) для выполнения переключения обеспечивают переключение с текущего положения (SJ) переключения на целевое положение (SJ+K) переключения переключателя (17). Для этого определяется первое значение для первого положения (PI) приводного вала (16) приводной системы (3) при помощи системы (4) обратной связи. Кроме того, определяется значение второго положения (PH) приводного вала (16) на основе достигаемого целевого положения (SJ+K) переключения переключателя (17). Из разницы значения для первого положения (PI) и значения для второго положения (PH) двигатель (12) управляется соответствующим образом, пока не будет достигнуто значение второго положения (PH) приводного вала (16) и тем самым целевое положение (SJ+K) переключения. 2 н. и 11 з.п. ф-лы, 6 ил.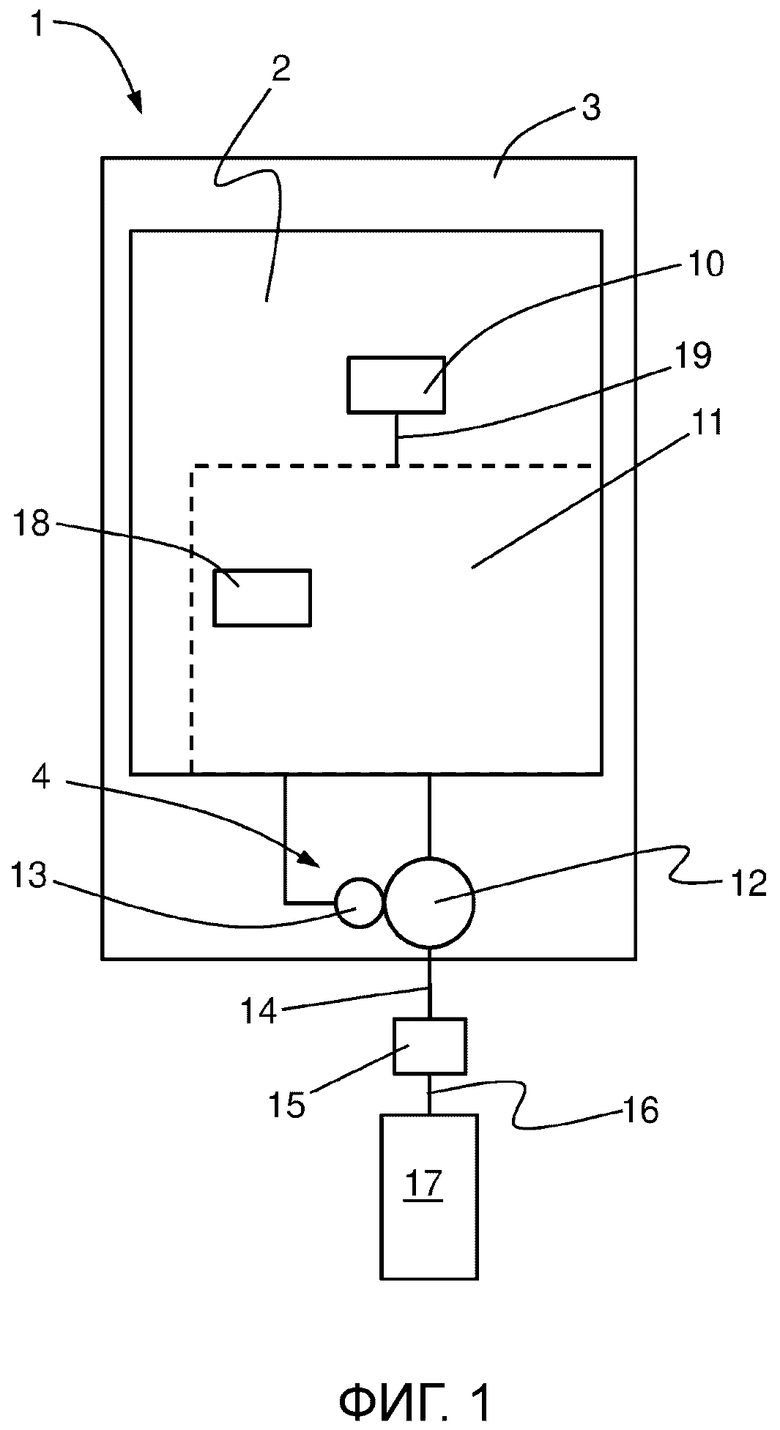
1. Способ выполнения переключения переключателя (17) с текущего положения (SJ) переключения на целевое положение (SJ+K) переключения при помощи приводной системы (3),
отличающийся следующими этапами:
- прием сигнала переключения приводной системой (3) от устройства (2) управления;
- определение по меньшей мере одного значения первого положения (PI) приводного вала (16) приводной системы (3) при помощи сигнала обратной связи системы (4) обратной связи;
- определение значения второго положения (PH) приводного вала (16) на основе достигаемого целевого положения (SJ+K) переключения переключателя (17) устройством (2) управления;
- установление разницы между значением первого положения (PI) и значением второго положения (PH) приводного вала (16) устройством (2) управления;
- воздействие устройства (2) управления, в зависимости от сигнала обратной связи, на двигатель (12), пока не будет достигнуто значение второго положения (PH) приводного вала (16).
2. Способ по п. 1, причем
после определения по меньшей мере одного значения для первого положения (PI) приводного вала (16) при текущем положении (SJ) переключения, это значение первого положения (PI) приводного вала (16) сравнивают со значением положения (PH) приводного вала (16) достигнутого последним целевого положения (SJ) переключения;
если значение первого положения (PI) приводного вала (16) для текущего положения (SJ) переключения и значение положения (PH) приводного вала (16) достигнутого последним целевого положения (SJ) переключения не совпадают, устройство (2) управления воздействует в зависимости от сигнала обратной связи на двигатель (12), пока не будет достигнуто значение положения (PH) приводного вала (16) достигнутого последним положения (SJ) переключения.
3. Способ по п. 1 или 2, причем после определения значения для первого положения (PI) приводного вала (16) при помощи сигнала обратной связи системы (4) обратной связи проверяют, находится ли положение (PI) в предварительно заданном диапазоне допуска.
4. Способ по п. 3, причем переключение с текущего положения (SJ) переключения на целевое положение (SJ+K) переключения выполняют, если первое положение (PI) приводного вала (16) находится в предварительно заданном диапазоне допуска.
5. Способ по любому из пп. 1-4, причем переключение переключателя (17) с текущего положения (SJ) переключения на целевое положение (SJ+K) переключения выполняют таким образом, что шаг (K) переключения имеет значение +1 или -1.
6. Способ по любому из пп. 1-5, причем положение (P1, P2, …, PH) приводного вала (16) регистрируют системой (13) датчиков, которая является частью системы (4) обратной связи, и при этом система (13) датчиков непосредственно или опосредованно соединена с приводным валом (16).
7. Способ по любому из пп. 1-6, причем в памяти (18) устройства (2) управления сохраняют соотнесение положений (S1, S2, …, SN) переключения переключателя (17) и значений для позиции(P1, P2, …, PH) приводного вала (16).
8. Приводная система (3) для переключателя (17) для выполнения переключения с текущего положения (SJ) переключения на целевое положение (SJ+K) переключения, включающая в себя:
- приводной вал (16), который соединяет приводную систему (3) с переключателем (17), двигатель (12) для приведения в движение приводного вала (16) и устройство (2) управления, которое генерирует сигналы переключения для приводной системы (3),
отличающаяся
- системой (4) обратной связи, которая функционально соотнесена с приводным валом (16) и соединена с силовой частью (11) приводной системы (3), причем система (4) обратной связи выполнена для определения значения первого положения (PI) приводного вала (16) приводной системы (3) и генерирования сигнала обратной связи на основе этого положения; и
- блоком (10) управления устройства (2) управления, который соединен с силовой частью (11) и выполнен для того, чтобы в зависимости от сигнала переключения и сигнала обратной связи приводить в действие двигатель (12), пока не будет достигнуто целевое положение (SJ+K) переключения.
9. Приводная система (3) по п. 8, причем устройство (2) управления включает в себя память (18); и силовая часть (11) служит для энергоснабжения двигателя (12); и в памяти (18) сохранено соотнесение положений (S1, S2, …, SN) переключения переключателя (17) и значений для положений (P1, P2, …, PH) приводного вала (16).
10. Приводная система (3) по п. 8 или 9, причем система (4) обратной связи включает в себя систему (13) датчиков, которая непосредственно или опосредованно соединена с приводным валом (16).
11. Приводная система (3) по п. 10, причем система (13) датчиков является датчиком абсолютных значений, многооборотным датчиком абсолютных значений, однооборотным датчиком угла поворота, виртуальным датчиком угла поворота или виртуальным датчиком угла поворота по меньшей мере с одним вспомогательным контактом.
12. Приводная система (3) по п. 11, причем система (13) датчиков является однооборотным датчиком угла поворота или виртуальным датчиком угла поворота по меньшей мере с одним вспомогательным контактом.
13. Приводная система (3) по любому из пп. 8-12, причем вал (14) двигателя соединен через передаточный механизм (15) с приводным валом (16) для переключателя (17).
| WO 2012135209 A1, 04.10.2012 | |||
| DE 102010033195 B3, 10.11.2011 | |||
| DE 19744465 C1, 11.03.1999 | |||
| DE 19743864 C1, 15.04.1999 | |||
| DE 10315204 A1, 21.10.2004 | |||
| СТУПЕНЧАТЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 2004 |
|
RU2324994C2 |
| СПОСОБ КОНТРОЛЯ ПЕРЕКЛЮЧАТЕЛЯ СТУПЕНЕЙ | 2013 |
|
RU2629566C2 |
