ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к носимым системам для поддержания рук пользователя, используемым в промышленности, в частности в добывающей отрасли, на сборочных, сортировочных и иных производствах, где распространено наличие профессиональных заболеваний опорно-двигательного аппарата сотрудников.
УРОВЕНЬ ТЕХНИКИ
В уровне техники широко описаны носимые системы и экзоскелеты для поддержания рук человека во время выполнения каких-либо работ, требующих длительного напряжения [1]-[4].
Ближайшим аналогом заявленного изобретения является устройство для поддержки по меньшей мере одного плеча пользователя [5], характеризующееся тем, что оно состоит из опорного элемента для руки с держателем и пассивного привода, способного прикладывать усилие к опорному элементу; рычага, упора для передачи усилия и элемента передачи усилия, с возможностью передачи противодействующей силы на опорный элемент на поясе. При этом устройство выполнено таким образом, что движение рычага не ограничивает устройство и сила действует эксцентрично по отношению к оси поворота рычага, и отличается тем, что основной шарнир вращения рычага располагается в области лопатки пользователя.
Описанное устройство обладает рядом серьезных недостатков, таких как ограничение диапазона свободных движений, чрезмерные габариты устройства, сложность правильного позиционирования неподвижных элементов на корпусе человека и малая область полезной нагрузки при поддержке руки. Они негативно влияют на эргономические характеристики аппарата, в том числе приводят к невозможности существенного увеличения усилия при сохранении эргономических характеристик. Возникают существенные требования к точной настройке под антропометрические параметры конкретного оператора. Также присутствуют значительные выступающие части, мешающие свободному движению и возникает перекрытие областей тела, таких как область лопаток. Эти факторы и недостатки приводят к снижению комфорта при использовании, существенному уменьшению сферы и сужению области применения из-за потери эффективности данного устройства.
Таким образом, задачей настоящего изобретения было создание аналогичного устройства, лишенного указанных недостатков, обладающего высокой эксплуатационной эргономичностью и высоким спектром применимости в разных сферах производственных процессов, а значит и экономически целесообразного для приобретения промышленными компаниями, нуждающимися в подобных устройствах для своих сотрудников.
Техническими результатами настоящего изобретения являются:
• расширение арсенала надежных, комфортных в использовании, износоустойчивых устройств, пригодных для применения в качестве промышленного экзоскелета или средства индивидуальной защиты опорно-двигательного аппарата;
• уменьшение скорости снятия устройства;
• дополнительное снижение нагрузки на мышцы спины;
• снижение работы мышц, затрачиваемой на снятие ассистирующего усилия (усилия поддержки) при выводе рук из рабочей области;
• появление возможности надевать устройство под рабочую одежду;
• увеличение рабочей зоны;
• расширение диапазона рабочих движений;
• освобождение необходимых зон на поверхности тела;
• уменьшение времени, необходимого для надевания устройства;
• повышение долговечности и надежности;
• уменьшение габаритов и веса устройства.
Указанный технический результат достигается благодаря нескольким существенным доработкам:
• Первая доработка заключается в использовании дистанцирующего элемента, длина которого незначительно изменяется в процессе движения, что может компенсировать несоосные нагрузки на силовой элемент;
• Вторая доработка заключается в использовании силового элемента, высвобождающего энергию при увеличении внешних геометрических характеристик;
• Третья доработка заключается в изменении кинематической схемы, позволяющей использовать толкающий силовой элемент;
• Четвертая доработка заключается в изменении рабочего положения оси вращения, таким образом, что она переносится из области лопатки в область плечевого сустава;
• Отсутствие элемента компенсации изгибающего усилия приводит к повышению надежности устройства.
ТЕРМИНЫ
«Промышленный экзоскелет» (ПЭ) в контексте настоящего изобретения - это носимое на человеке средство индивидуальной защиты опорно-двигательного аппарата, компенсирующее и/или перераспределяющее нагрузку на опорно-двигательный аппарат.
«Средство индивидуальной защиты опорно-двигательного аппарата» (СИЗ ОДА) - это устройство, используемое для предотвращения или снижения негативного воздействия тяжести трудового процесса на опорно-двигательный аппарат, предназначенное, в том числе, для снижения риска профессиональных заболеваний и увеличения производительности труда (увеличения естественных возможностей) человека.
Под терминами, указывающими на взаимное расположение объектов следует понимать взаимное расположение с погрешностью не более 5% и (или) 5 сантиметров и (или) 5 градусов.
«Свободная зона» в контексте настоящего изобретения - это область, в которой могут находится руки оператора, но при этом величина ассистирующего усилия минимальна или существенно ниже величины поддержки, используемой во время работы.
«Прямая ортогональна плоскости» или «ось ортогональна плоскости» в контексте настоящего изобретения допускает отклонение от нормали не более чем на 10 градусов.
Под «предназначено» подразумевается, в частности, специальное назначение, использование и (или) оснащение. Тот факт, что объект предназначен для конкретной функции, должен, в частности, означать, что объект выполняет эту конкретную функцию по меньшей мере в одном приложении и (или) рабочем состоянии.
«Необходимое усилие» в контексте настоящего изобретения - это воздействие, снижающее нагрузку на опорно-двигательный аппарат человека.
«Степени свободы» - совокупность независимых координат перемещения и/или вращения, полностью определяющая положение системы или тела.
«Крепление» в контексте настоящего изобретения - это шарнирное, механическое, магнитное, или иное подвижное соединение, обеспечивающее необходимую относительную подвижность между соединяемыми элементами.
«Шарнир» в контексте настоящего изобретения - это механическое устройство, позволяющее реализовать заданную (заданные) степени свободы (подвижности) при закреплении одного элемента к другому, работой на изменение положения шарнирных координат которого можно пренебречь в контексте данного применения описываемого устройства или понятия.
«Сферический шарнир» в контексте настоящего изобретения - это механическое устройство или элемент, допускающий взаимное движение соединяемых тел в трех несовпадающих вращательных координатах.
«Ось шарнира» в контексте настоящего изобретения - это прямая, вокруг которой происходит моментальное вращение одного элемента конструкции относительно другого, соединенных между собой шарниром или креплением.
«Точка приложения усилия» (15) в контексте настоящего изобретения - это виртуальная точка, относительно которой суммарный момент сил взаимодействия соответствующей верхней конечности оператора и держателя руки (2) равен нулю.
«Рабочее движение» в контексте настоящего изобретения - это движение руки, определяемое вектором скорости точки (15).
«Плечевой сустав оператора» (1) в контексте настоящего изобретения - это область на поверхности тела оператора, минимально отдаленная от плечевого сустава оператора, находящаяся на верхней внешней поверхности плеча.
«Держатель руки» (2) в контексте настоящего изобретения - это элемент конструкции, к которому крепится верхняя конечность оператора и через который передается усилие от силового элемента к оператору.
«Фиксатор опоры» (3) в контексте настоящего изобретения - это элемент, позволяющий зафиксировать часть экзоскелета на поверхности тела оператора, предпочтительно в области бедренного сустава для передачи нагрузки от силового элемента на корпус оператора.
«Крепление опоры» (4) в контексте настоящего изобретения - это крепление произвольного типа, которое имеет по меньшей мере три вращательные степени свободы (не обязательно находящиеся водном месте геометрически).
«Опора» (5) в контексте настоящего изобретения - это объект, позволяющий передать полезную нагрузку от силового элемента на корпус оператора, мало изменяющий геометрические характеристики в процессе рабочей операции, при этом регулировкой ее длины может осуществляться подстройка кинематики устройства под анатомические особенности оператора Также она может содержать недостающую вращательную степень свободы в случае, если крепление опоры (4) имеет две степени свободы.
«Планка» (6) в контексте настоящего изобретения выполнена в виде рычага для передачи усилия на держатель руки.
«Крепление» (8, 9, 10, 12) в контексте настоящего изобретения - это шарнирное, механическое, магнитное, или иное подвижное соединение, обеспечивающее необходимую относительную подвижность между соединяемыми элементами.
Крепление (8) имеет не более двух степеней свободы и не содержит подвижной оси, параллельной главной оси (минимального момента) тензора инерции планки. Одна из осей шарнира крепления (8) параллельна или находится под углом не более 20 градусов к осям (9) и (10).
Крепление (9) представляет собой шарнир, содержащий ось вращения, ортогональную плоскости рабочего движения, а также допускает наличие оси вращения вокруг продольной оси элемента (7). Также может содержать поступательную степень свободы вдоль продольной оси элемента (7), используемую для регулировки зоны максимального усилия или вдоль планки (6) для регулировки величины усилия.
Крепление (12) может представлять собой вращательный шарнир, ось которого ортогональна плоскости рабочего движения. Также может содержать поступательную степень свободы вдоль оси элемента (5) или дополнительную ось вращения, ортогональную плоскости рабочего движения, используемые для отключения усилия и/или увеличения свободной зоны. Крепление (12) соединяет опору (5) с элементами (7) и (11), фиксируя один из них, относительно опоры (5).
Крепление (10) может представлять собой крепление произвольного типа.
«Дистанцирующий элемент» (7) в контексте настоящего изобретения это объект, расстояние между креплениями (9) и (12) которого, мало (не более чем на 4%) изменяется относительно исходной длины элемента в процессе выполнения рабочей операции при приложении усилия, ограниченного сценарием использования. Данный элемент является несжимаемым.
«Силовой элемент» (11) в контексте настоящего изобретения может представлять собой как пассивное устройство, способное накапливать механическую энергию при сжатии и затем отдавать ее при подъеме руки, так и активное, способное использовать внешнюю энергию для совершения полезной работы.
Если не указано иное, все технические и специальные термины, использованные в данном контексте, имеют общепринятое в данной области техники значение.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Ниже представлены некоторые частные варианты реализации заявленного изобретения. Они иллюстрируют предложенное решение, не ограничивая при этом объем заявленных в формуле притязаний.
Предложенное изобретение представляет собой устройство для обеспечения необходимого усилия для поддержки по меньшей мере одной руки оператора путем передачи усилия от держателя руки (2) к фиксатору опоры (3), посредством по меньшей мере одного силового элемента (11), с одной стороны закрепленного к планке (6) посредством крепления (10), с другой стороны закрепленного на опоре (5) посредством крепления (12), которая с помощью крепления опоры (4) крепится к фиксатору опоры (3), при этом необходимое движение планки (6), к которой прикреплен держатель руки (2), обеспечивает по меньшей мере один дистанцирующий элемент (7), закрепленный с одной стороны к указанной планке (6) посредством крепления (9), с другой стороны посредством крепления (12) - к указанной опоре (5) или к указанному креплению опоры (4) или к указанному фиксатору опоры (3).
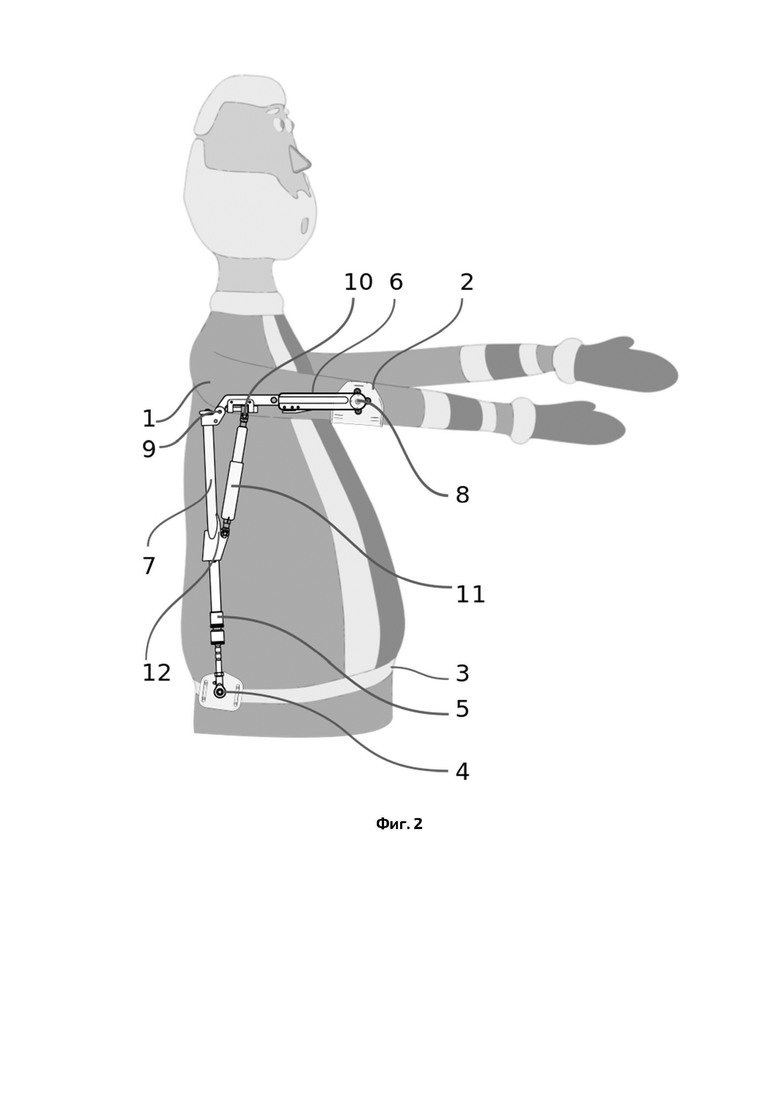
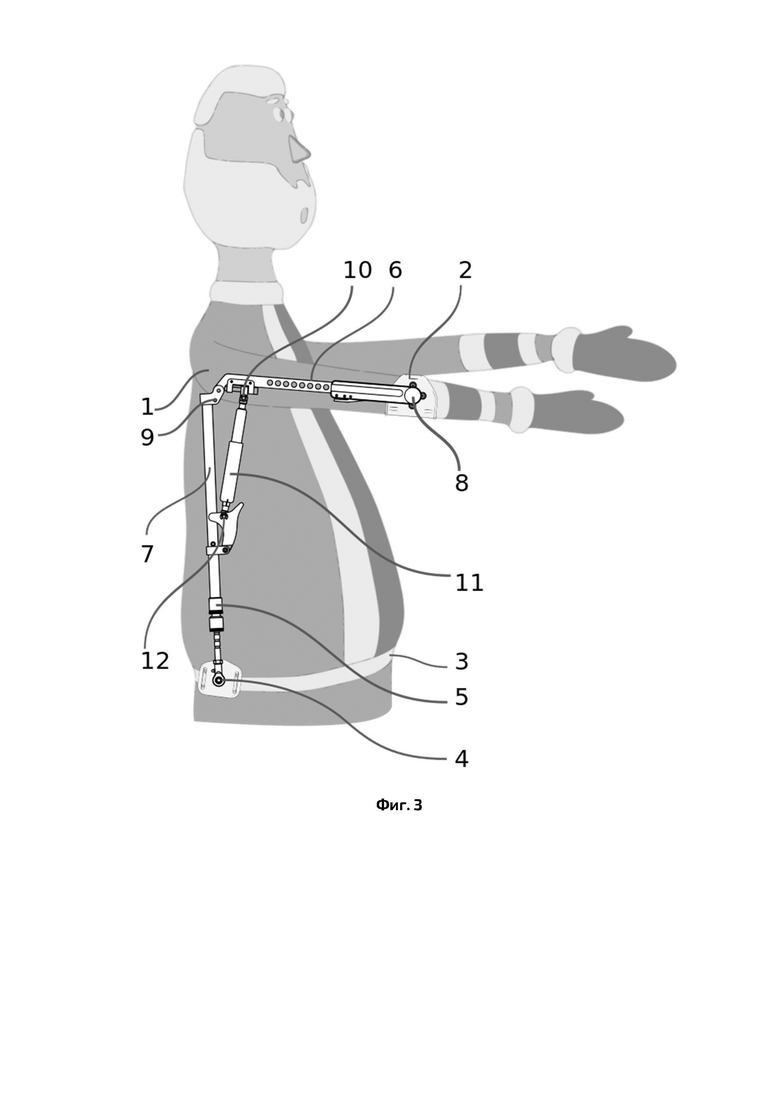
В одном из предпочтительных вариантов воплощения, подобно фиг. 2 и фиг. 3, крепление (12) фиксирует элемент (7) относительно элемента (5) и содержит вращательную степень свободы элемента (11) относительно элементов (5) и (7), ось которой ортогональна плоскости рабочего движения.
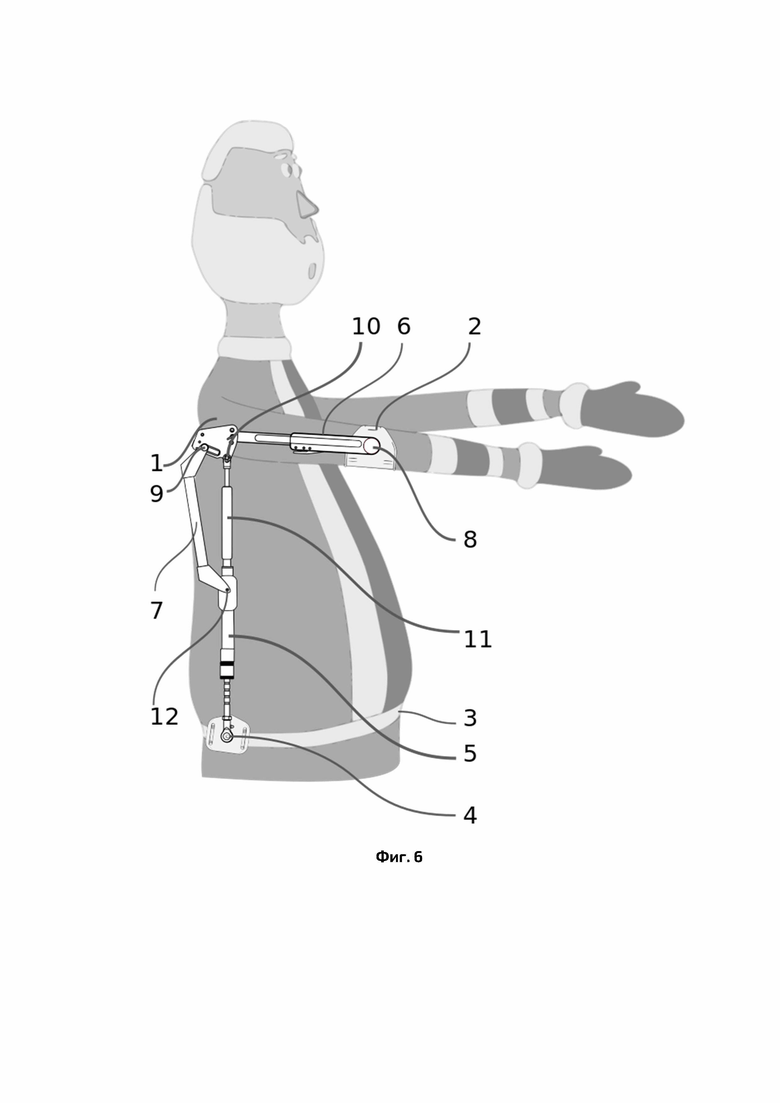
В одном из предпочтительных вариантов воплощения, подобно фиг. 4 и фиг. 6, крепление (12) фиксирует элемент (11) относительно элемента (5) и содержит вращательную степень свободы элемента (7) относительно элементов (5) и (11), ось которой ортогональна плоскости рабочего движения.
В одном из предпочтительных вариантов устройство имеет регулировку длины опоры (5) и регулировку длины планки (6), позволяющие позиционировать крепления (9) и (10) в области плечевого сустава оператора (1). Устройство может состоять из одного или двух модулей, для поддержки одной или двух рук, соответственно.
В одном из предпочтительных вариантов воплощений «Крепление» может представлять собой подшипниковое соединение, втулку, упругий элемент, тканную деталь, деформируемую деталь, шаровой наконечник, подвижный упор.
«Держатель руки» (2) в одном из предпочтительных вариантов воплощений может представлять собой пластиковый ложемент, шарнирно закрепленный на планке (6) имеющий накладку из ткани и систему ремней с регулировками для разных размеров руки оператора и застежками для быстрого снятия, также может представлять собой кронштейн с системой подвесов или иную деталь, надежно фиксирующуюся на верхней конечности оператора, например, на плече, или предплечье, или локте или нескольких зонах рядом с локтевым суставом. В одном из предпочтительных вариантов элемент имеет покрытие с высоким коэффициентом трения при движении вдоль руки и с низким - при вращении вокруг.
«Опора» (5) в одном из предпочтительных вариантов воплощений может представлять собой несжимаемый элемент или набор элементов, неподвижно фиксирующихся друг относительно друга в том числе, состоящий из по меньшей мере одной трубки, стержня, планки, фермы, оси, шпильки. В одном из предпочтительных вариантов опора выполнена в форме трубки и содержит регулировку длины для операторов разного роста, которая может быть дискретной или непрерывной. Опора также может содержать гнездо фиксации силового элемента. В одном из предпочтительных вариантов воплощения, подобно фиг. 1В, фиг. 2, фиг. 3, фиг. 5, опора (5) может являться частью дистанцирующего элемента (7).
«Планка» (6) в одном из предпочтительных вариантов воплощений может представлять собой трубку, планку, балку, профиль, тягу бобышку, палку или соединение любого набора указанных элементов, как вдоль основных осей, так и под углом, при этом регулировкой ее длины может осуществляться подстройка кинематики устройства под анатомические особенности оператора. В одном из предпочтительных вариантов элемент состоит из двух элементов, имеющих фиксируемую поступательную степень свободы друг относительно друга, позволяющую регулировать ее длину.
«Фиксатор опоры» (3) в одном из предпочтительных вариантов воплощений может представлять собой пояс, накладку, вставку, вкладыш, наклейку, разъемное магнитное соединение, прищепку, заклепку, застежку, брошь, которое может быть как частью устройства, так и крепиться на элемент одежды оператора, например, ремень, вкладываться в карман, крепиться на пояс или иное оборудование находящееся во время выполнения целевого процесса в заданной области. Фиксатор может крепиться к собственному ремню оператора. В одном из предпочтительных вариантов выполнен в виде пояса и имеет две независимые регулировки длины на передней и задней части, соответственно, и пряжку для быстрого сброса.
«Крепление» (8) в одном из предпочтительных вариантов воплощений может представлять собой вращательный шарнир с одной степенью свободы расположенный под прямым углом к планке (6).
«Крепления» (9) и (12) в одном из предпочтительных вариантов воплощений могут представлять собой вращательный шарнир с одной степенью свободы под прямым углом к планке (6). В одном из предпочтительных вариантов шарнир одного из креплений обладает дополнительной степенью свободы (вращательной или поступательной) для регулировки длины дистанцирующего элемента. Крепление (9) может содержать поступательную степень свободы вдоль планки для регулировки плеча усилия силового элемента (11).
«Крепление» (10) в одном из предпочтительных вариантов воплощений может представлять собой шарнир, содержащий одну (допускающую движение в плоскости рабочего движения) а также, возможно, вторую (ортогональную первой) вращательные степени свободы. Первая степень свободы может быть реализована наконечником газовой пружины или петлей рессоры, в то время, как вторая может быть реализована вокруг винта или линейной направляющей поступательной степени свободы данного крепления, используемой для регулировки плеча приложения усилия силового элемента.
«Крепление опоры» (4) в одном из предпочтительных вариантов воплощений могут быть выполнено в виде сферического шарнира, набора цилиндрических шарниров с непараллельными осями или закрепления с помощью упругого или нет материала, свойства которого допускают многократные повороты или изгибы при сохранении механических свойств. При этом вращательная степень вокруг «оси» опоры (5) может быть в любом месте данной опоры, содержаться в настройке ее длины или конструктивно заложена в характеристику самого силового элемента (11).
«Дистанцирующий элемент» (7) в одном из предпочтительных вариантов воплощений может представлять собой несжимаемый и нерастяжимый элемент или набор элементов, неподвижно фиксирующихся друг относительно друга в том числе, состоящий из по меньшей мере одной трубки, стержня, планки, фермы, оси, шпильки. В одном из предпочтительных вариантов опора выполнен в форме трубки и содержит регулировку длины, которая может быть дискретной или непрерывной. Элемент также может содержать гнездо фиксации силового элемента. В одном из предпочтительных вариантов воплощения, подобно может являться частью опоры (5) Дистанцирующий элемент может крепиться к силовому элементу (11), или к опоре (5), или к креплению опоры (4), или к фиксатору опоры (3).
«Силовой элемент» (11) в одном из предпочтительных вариантов воплощений может представлять собой газовую пружину, газлифт, пружину сжатия, рессору или активный привод, в том числе пневмоцилиндр, гидроцилиндр или линейный актуатор, или устройство, состоящие из набора указанных элементов, или иной элемент, геометрические характеристики которого увеличиваются при использовании внешней энергии для совершения полезной работы. В одном из предпочтительных вариантов при использовании газовой пружины дополнительная вращательная степень свободы шарнира (10) должна допускать движение, ограниченное элементом (7).
Предложенное устройство в одном из предпочтительных вариантов может быть использовано в качестве промышленного экзоскелета.
Предложенное устройство в одном из предпочтительных вариантов может быть использовано в качестве средства индивидуальной защиты опорно-двигательного аппарата.
Предложенное устройство может применяться для повышения производительности труда сотрудников промышленных предприятий.
Предложенное устройство может применяться для снижения риска травм и возникновения профессиональных заболеваний сотрудников промышленных предприятий.
Предложенное устройство может применяться для снижения затрат предприятий, связанных с временной, частичной или полной потерей работоспособности или снижения производительности и концентрации сотрудников.
Предложенное устройство может применяться для снижения выбросов CO2 из-за снижения энергозатрат сотрудников.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
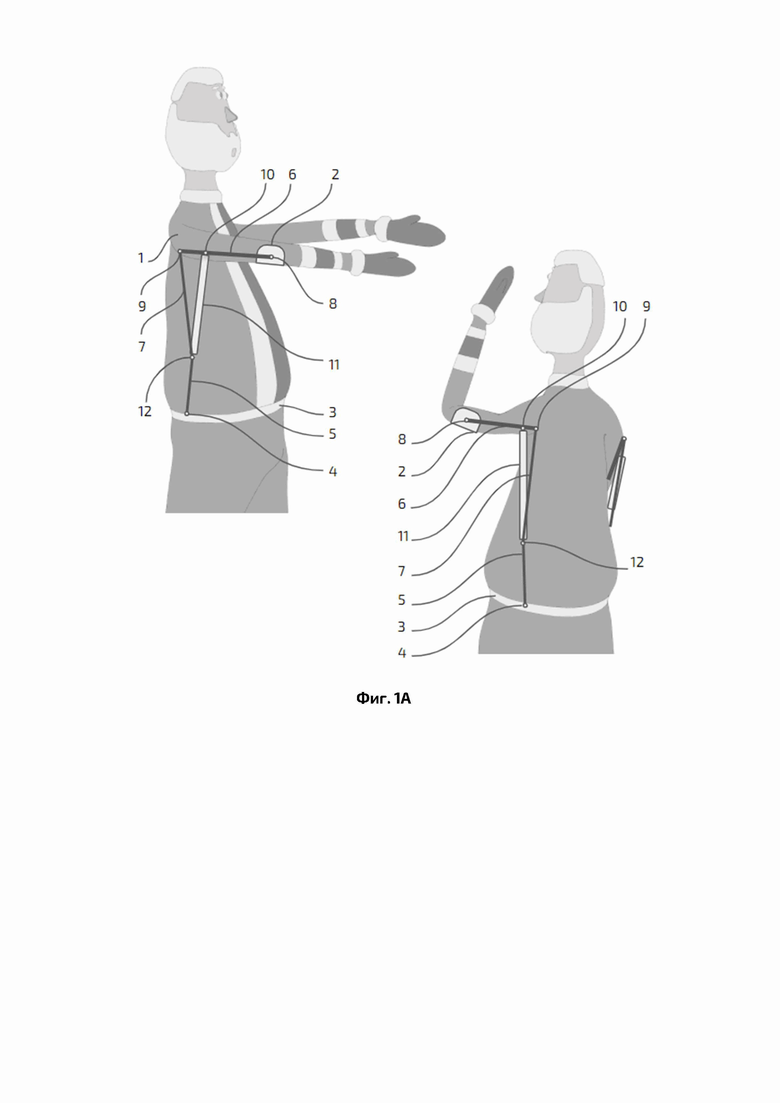
Фиг. 1А. Базовая модель устройства, вид сбоку и сзади.
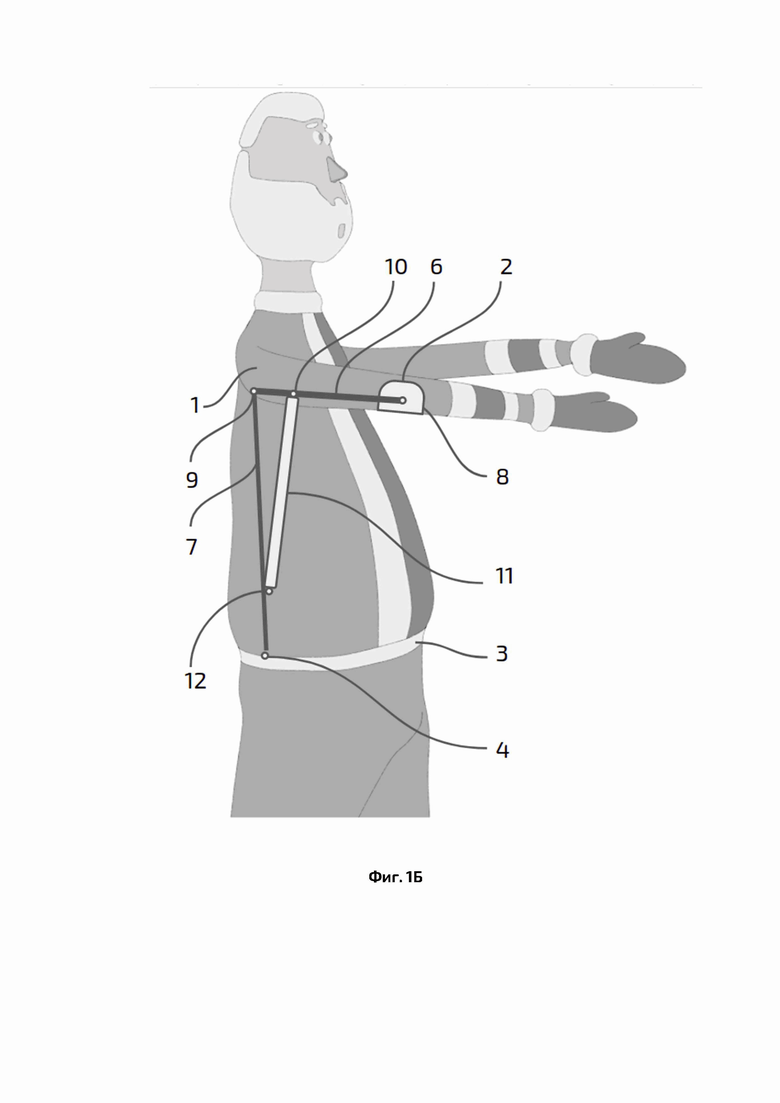
Фиг. 1Б. Модели устройства с изменением кинематической схемы, вид сбоку.
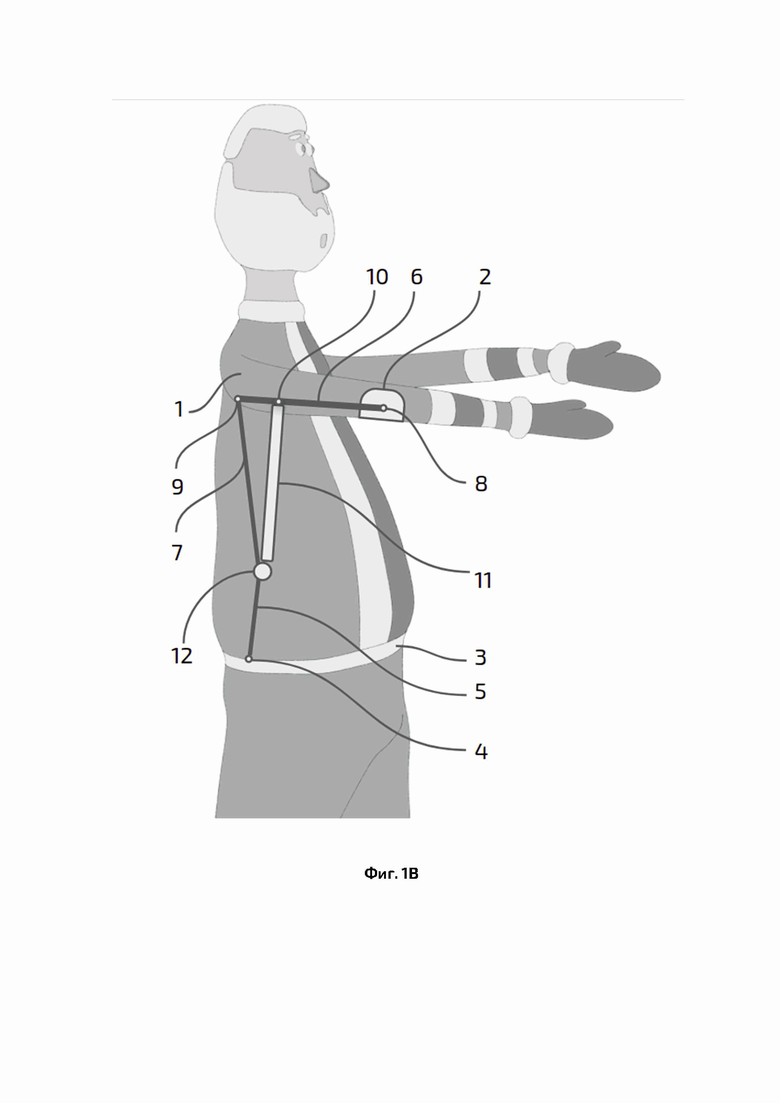
Фиг. 1В. Модель устройства с изменением формы планки и изменением геометрии шарниров.
Фиг. 2 Возможный вариант воплощения устройства с поступательной подвижностью в креплении (12).
Фиг. 3. Возможный вариант воплощения устройства с поворотной подвижностью в креплении (12).
Фиг. 4. Возможный вариант воплощения устройства с фиксацией силового элемента на опоре.
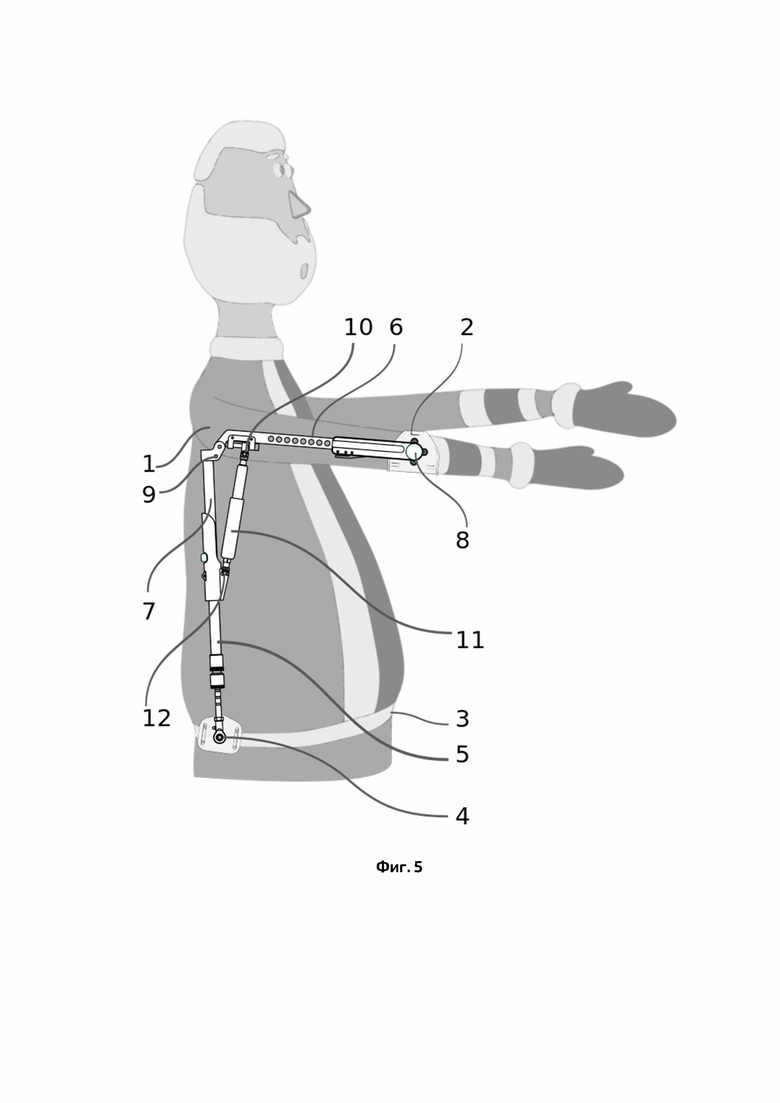
Фиг. 5. Возможный вариант воплощения устройства с поступательной степенью свободы в креплении (12).
Фиг. 6. Возможный вариант воплощения устройства с фиксацией силового элемента на опоре и поступательной подвижностью в креплении (12).
1 - плечевой сустав оператора
2 - держатель руки
3 - фиксатор опоры
4 - крепление опоры
5 - опора
6 - планка
7 - дистанцирующий элемент
8 - крепление
9 - крепление
10 - крепление
11 - силовой элемент
12 - крепление
СПИСОК ЛИТЕРАТУРЫ
1. RU175852U1 (ФГБОУ высшего образования "Российский национальный исследовательский медицинский университет им. Н.И. Пирогова" Министерства здравоохранения Российской Федерации), 21.12.2017;
2. WO2019081851 A1 (В TEMIA INC; 5AFRAN ELECTRONICS & DEFENSE), 02.05.2019;
3. CN110181489 (KNOWGENE TAIZHOU ROBOT TECH CO LTD), 30.08.2019;
4. CN110238819 (UNIV BEIHANG), 17.09.2019;
5. DE102017112436 (OTTOBOCK SE AND CO KGAA), 06.12.2018.
| название | год | авторы | номер документа |
|---|---|---|---|
| НОСИМОЕ УСТРОЙСТВО ДЛЯ ПОДДЕРЖКИ РУК ПОЛЬЗОВАТЕЛЯ | 2021 |
|
RU2808690C1 |
| УСТРОЙСТВО СИМУЛЯЦИИ ПОВЕДЕНИЯ СПОРТСМЕНА-ЕДИНОБОРЦА | 2016 |
|
RU2692900C2 |
| УСТРОЙСТВО ДЛЯ ПОДДЕРЖАНИЯ ОБЕИХ РУК ПОЛЬЗОВАТЕЛЯ | 2017 |
|
RU2749840C1 |
| Роботизированное устройство тренажера для реабилитации конечностей и способ его применения | 2021 |
|
RU2766754C1 |
| Строповый многофункциональный тренажер | 2020 |
|
RU2746399C1 |
| УНИВЕРСАЛЬНЫЙ ТРЕНАЖЕР | 1996 |
|
RU2105582C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| Многофункциональный тренажер для коррекции осанки | 2017 |
|
RU2768670C2 |
| УСТРОЙСТВО ПОДДЕРЖКИ ПАЦИЕНТА ПРИ ИММОБИЛИЗАЦИИ В ПОЛОЖЕНИИ ЛЕЖА НА ЖИВОТЕ | 2013 |
|
RU2630772C2 |
| ГАРНИТУРА НАУШНИКОВ | 2015 |
|
RU2606928C1 |

Группа изобретений относится к медицине. Устройство для обеспечения необходимого усилия для поддержки по меньшей мере одной руки оператора, включающее держатель руки оператора, фиксатор опоры, по меньшей мере один силовой элемент, с одной стороны закрепленный к планке посредством крепления, с другой стороны закрепленный на опоре посредством четвертого крепления, которая с помощью крепления опоры прикреплена к фиксатору опоры, при этом по меньшей мере один дистанцирующий элемент выполнен с возможностью обеспечения движения планки, к которой прикреплен держатель руки, закрепленный с одной стороны к указанной планке посредством второго крепления, с другой стороны посредством четвертого крепления - к силовому элементу, или к указанной опоре, или к указанному креплению опоры, или к указанному фиксатору опоры, предназначенному для фиксации устройства на теле оператора. Применение устройства для повышения производительности труда сотрудников промышленных предприятий. Применение устройства для снижения риска травм и возникновения профессиональных заболеваний опорно-двигательного аппарата сотрудников. Применение устройства для снижения затрат предприятия, связанных с временной, частичной или полной потерей работоспособности или снижения производительности и концентрации сотрудника. Применение устройства для снижения выбросов CO2 из-за снижения энергозатрат работника. Техническим результатом является расширение арсенала надежных, комфортных в использовании, износоустойчивых устройств, пригодных для применения в качестве промышленного экзоскелета или средства индивидуальной защиты опорно-двигательного аппарата. 5 н. и 28 з.п. ф-лы, 6 ил.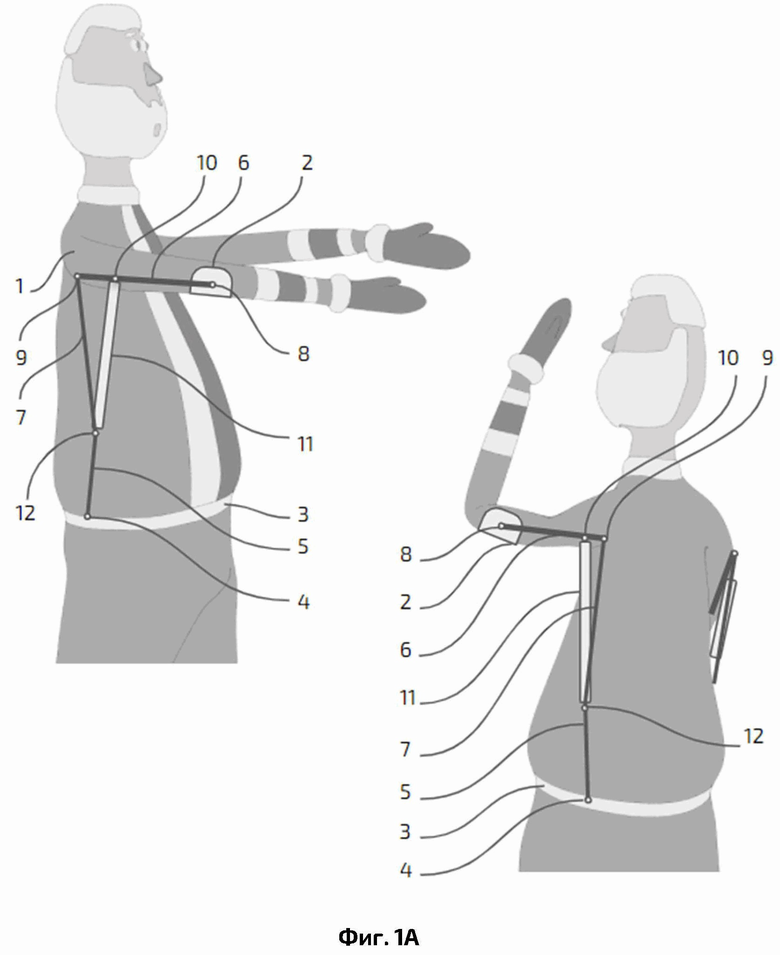
1. Устройство для обеспечения необходимого усилия для поддержки по меньшей мере одной руки оператора, включающее держатель руки (2) оператора, фиксатор опоры (3), по меньшей мере один силовой элемент (11), с одной стороны закрепленный к планке (6) посредством крепления (10), с другой стороны закрепленный на опоре (5) посредством четвертого крепления (12), которая с помощью крепления опоры (4) прикреплена к фиксатору опоры (3), при этом по меньшей мере один дистанцирующий элемент (7) выполнен с возможностью обеспечения движения планки (6), к которой прикреплен держатель руки (2), закрепленный с одной стороны к указанной планке (6) посредством второго крепления (9), с другой стороны посредством четвертого крепления (12) - к силовому элементу (11), или к указанной опоре (5), или к указанному креплению опоры (4), или к указанному фиксатору опоры (3), предназначенному для фиксации устройства на теле оператора.
2. Устройство по п.1, состоящее из по меньшей одного модуля, предназначенного для поддержки одной руки оператора.
3. Устройство по п.1, где держатель руки (2) может представлять собой в том числе пластиковый ложемент, шарнирно закрепленный на планке (6), имеющий накладку из ткани и систему ремней с регулировками для разных размеров руки оператора и застежками для быстрого снятия, также может представлять собой кронштейн с системой подвесов или иную деталь, надежно фиксирующуюся на верхней конечности оператора, например на плече, или предплечье, или локте или нескольких зонах рядом с локтевым суставом.
4. Устройство по п.1, где фиксатор опоры (3) может представлять собой в том числе пояс, накладку, вставку, вкладыш, наклейку, разъемное магнитное соединение, прищепку, заклепку, застежку, брошь, которое может быть как частью устройства, так и прилагаться в наборе с ним и крепиться на элемент одежды оператора, например, ремень, вкладываться в карман, крепиться на пояс или иное оборудование находящееся во время выполнения целевого процесса в заданной области.
5. Устройство по п.4, где фиксатор опоры (3) выполнен с возможностью прикрепления к собственному ремню оператора.
6. Устройство по п.4, где фиксатор опоры (3) выполнен в виде пояса и имеет независимую регулировку длины на передней и задней части и пряжку для быстрого сброса.
7. Устройство по п.1, где крепление опоры (4) может быть выполнено в виде сферического шарнира, набора цилиндрических шарниров с непараллельными осями или закрепления с помощью упругого или нет материала, свойства которого допускают многократные повороты или изгибы при сохранении механических свойств.
8. Устройство по п.7, где крепление опоры (4) представляет собой шарнир, имеющий по меньшей мере две вращательные степени свободы.
9. Устройство по п.7, где крепление опоры (4) может представлять собой подшипниковое соединение, втулку, упругий элемент, ткацкую деталь, деформируемую деталь, шаровой наконечник, подвижный упор.
10. Устройство по п.1, где опора (5) и планка (6) выполнены с возможностью регулировки их длины, что позволяет позиционировать второе крепление (9) и третье крепление (10) в области плечевого сустава оператора (1).
11. Устройство по п.1, где опора (5) представляет собой несжимаемый элемент или набор элементов, неподвижно зафиксированных друг относительно друга в том числе, состоящий из по меньшей мере одной трубки, стержня, планки, фермы, оси, шпильки или соединения любого набора указанных элементов, как вдоль основных осей, так и под углом, для выполнения основной функции опоры (5).
12. Устройство по п.11, где опора (5) выполнена в форме трубки и выполнена с возможностью регулировки длины, где упомянутая регулировка может быть дискретной или непрерывной.
13. Устройство по п.11, где опора (5) содержит гнездо фиксации силового элемента.
14. Устройство по п.1, где опора (5) имеет ничтожно малую длину.
15. Устройство по п.1, где планка (6) выполнена в виде рычага для передачи крутящего момента на держатель руки.
16. Устройство по п.15, где планка (6) может представлять собой трубку, планку, балку, профиль, тягу бобышку, палку или соединение любого набора указанных элементов как вдоль основных осей, так и под углом.
17. Устройство по п.16, где планка (6) состоит из двух элементов, имеющих фиксируемую поступательную степень свободы относительно друг друга, позволяющую регулировать ее длину.
18. Устройство по п.1, где дистанцирующий элемент (7) представляет собой объект, не изменяющий длину существенно при приложении нагрузки на держатель руки (2).
19. Устройство по п.18, где дистанцирующий элемент (7) может представлять собой трубку, стержень, планку, ферму, ось, шпильку или набор подобных элементов.
20. Устройство по п.1, где первое крепление (8) может представлять собой вращательный шарнир с одной степенью свободы, расположенный под прямым углом к планке (6).
21. Устройство по п.1, где второе крепление (9) и четвертое крепление (12) могут представлять собой вращательный шарнир с одной степенью свободы под прямым углом к планке (6).
22. Устройство по п.21, где шарнир одного из креплений, а именно второго крепления (9) и четвертого крепления (12), обладает дополнительной степенью свободы, вращательной или поступательной, для регулировки длины нерастяжимого элемента.
23. Устройство по п.21, где второе крепление (9) может содержать поступательную степень свободы вдоль дистанцирующего элемента (7) для регулировки зоны максимального усилия.
24. Устройство по п.1, где третье крепление (10) может представлять собой шарнир, содержащий одну, допускающую движение в плоскости рабочего движения, а также, возможно, вторую, ортогональную первой, вращательные степени свободы.
25. Устройство по п.24, где первая степень свободы реализована наконечником газовой пружины или петлей рессоры, в то время как вторая реализована вокруг винта или линейной направляющей поступательной степени свободы данного крепления, используемой для регулировки плеча приложения усилия силового элемента.
26. Устройство по любому из пп.20-25, где первое крепление (8), второе крепление (9), третье крепление (10), четвертое крепление (12) могут представлять собой подшипниковое соединение, втулку, упругий элемент, ткацкую деталь, деформируемую деталь, шаровой наконечник, подвижный упор.
27. Устройство по п.1, где силовой элемент (11) может представлять собой газовую пружину, газлифт, пружину сжатия, рессору или активный привод, в том числе пневмоцилиндр, гидроцилиндр или линейный актуатор, или устройство, состоящие из набора указанных элементов, или иной элемент, геометрические характеристики которого увеличиваются при использовании внешней энергии для совершения полезной работы.
28. Устройство по п.27, где при использовании газовой пружины в качестве силового элемента (11) дополнительная вращательная степень свободы шарнира (10) допускает движение, ограниченное элементом (7).
29. Устройство по п.1, представляющее собой промышленный экзоскелет по меньшей мере одной верхней конечности.
30. Применение устройства по п.1 для повышения производительности труда сотрудников промышленных предприятий.
31. Применение устройства по п.1 для снижения риска травм и возникновения профессиональных заболеваний опорно-двигательного аппарата сотрудников.
32. Применение устройства по п.1 для снижения затрат предприятия, связанных с временной, частичной или полной потерей работоспособности, или снижения производительности и концентрации сотрудника.
33. Применение устройства по п.1 для снижения выбросов CO2 из-за снижения энергозатрат работника.
| US 20200093676 A1, 26.03.2020 | |||
| СПОСОБ ЛЕЧЕНИЯ ГИПЕРЕСТЕЗИИ ЭМАЛИ И ДЕНТИНА ЗУБОВ | 0 |
|
SU202453A1 |
| US 20160339583 A1, 24.11.2016 | |||
| WO 2020169674 A1, 27.08.2020 | |||
| US 20140158839 A1, 12.06.2014. | |||

