Изобретение касается устройства для поддержания двух рук пользователя, причем устройство имеет два поддерживающих руку элемента, каждый с одним оболочковым элементом для руки для надевания (приложения) на соответствующую руку, по меньшей мере один пассивный исполнительный орган, который выполнен для приложения усилия к меньшей мере одному из поддерживающих руку элементов, и по меньшей мере одну вспомогательную опору для подлежащего приложению усилия, которая имеет по меньшей мере один вспомогательный опорный элемент и по меньшей мере два элемента передачи усилия, которые выполнены для передачи противодействующего усилия от соответствующего одного из поддерживающих руку элементов на вспомогательный опорный элемент.
Такое устройство известно, например, из US 2016/008187 A1. Оно имеет вспомогательный опорный элемент (контропорный элемент), который выполнен в виде обвиваемого вокруг туловища пользователя ремня. На нем имеется две проходящих вдоль спины к плечу подпорки, которые сверху и сбоку около плечей пользователя соединены с соответствующим одним шарниром так, что рука может подниматься. На соответствующих шарнирах расположены пружинные элементы, посредством которых направленное вверх усилие может оказываться на оболочковые элементы для руки, так что, например, при поднятии очень тяжелых предметов или при работах над головой может осуществляться поддержание рук. Если руки должны опускаться, то руками на указанные оболочковые элементы должно оказываться давление, которое превышает прикладываемое пружинными элементами усилие так, чтобы руки опустились.
Из WO 2014/093408 А2 и из US 9,427,865 В2 известно похожее устройство, у которого в качестве механического аккумулятора энергии, который действует в качестве пассивного исполнительного органа, предусмотрена соответственно пружина, в частности натяжная пружина, которая соединена с тросом Боудена. Трос Боудена проводится через отклоняющий ролик так, что при повороте руки, что означает движение поддерживающего руку элемента относительно вспомогательного опорного элемента, пружина растягивается, так что механический аккумулятор энергии заряжается энергией.
В частности, для случая, когда пользователь устройства, например, спотыкается или падает и, например, должен перекатываться, такие устройства могут становиться опасными для пользователя и приводить к травмам. Это случается несмотря на то, что расположенные вне плечевого сустава шарниры устройства, например, согласно уровню техники максимально точно расположены так, что их шарнирные оси и оси вращения проходят через соответствующие оси плечевого сустава, так что могут воспроизводиться предположительно все движения, которые может осуществлять настоящее плечо и, тем самым, рука пользователя.
Активное устройство, которое при работе поддерживает руки над головой, известно из ЕР 3 156 193 А1. Оболочковые элементы для руки соединены друг с другом через множество разных шарниров и элементы соединительной рамы. Вследствие этого должно быть возможно максимально много их движений, которые может осуществлять плечевой сустав, даже с надетым устройством. Однако устройство из–за большого количества элементов является большим, конструктивно трудоемким и тем самым дорогим. К тому же устройство пытается имитировать плечевой сустав посредством двух шарнирных соединений. Вследствие этого возможны не все движения, которые может осуществлять настоящий плечевой сустав. В частности, для поднятия руки в определенном направлении предусмотренный для этого шарнир сначала должен поворачиваться в подходящее положение, чтобы выставить свою ось поворота в желаемое направление. Вследствие этого, при необходимости должны осуществляться дополнительные и неестественные движения, вследствие чего уменьшается комфорт и тем самым даже лояльность к устройству со стороны пользователя.
Другие поддерживающие устройства, которые осуществляют поддержку, в частности при подъеме тяжелых предметов или при работах над головой, известны из WO 2014/195373 А1 и из US 2016/339583 А1. Однако эти устройства ориентированы только на особые движения, которые нужно поддерживать.
Поэтому, в основу изобретения положена задача устранения или по меньшей мере уменьшения указанных недостатков.
Изобретение решает поставленную задачу посредством устройства согласно ограничительной части пункта 1 формулы, которое характеризуется тем, что элементы передачи усилия расположены на вспомогательном опорном элементе с возможностью перемещения относительно вспомогательного опорного элемента, в частности с возможностью вращения вокруг оси вращения. Для этого, элементы передачи усилия могут быть закреплены, например, на вспомогательном опорном элементе посредством шарнира, шарового шарнира или иного шарнира, или, например, вставляться или вводиться одним концом элемента передачи усилия в предусмотренный для этого карман или держатель на вспомогательном опорном элементе.
В основу изобретения положено осознание того, что несмотря на часто сложную и трудоемкую систему шарниров посредством подобного рода ортезов и устройств в области плеча носителя многие движения не могут быть воспроизведены. Это имеет место, в частности, для движений, при которых ориентация и/или положение упомянутого по меньшей мере одного поддерживающего руку элемента относительно вспомогательного опорного элемента изменяется и которые осуществляются не или не только за счет движения плеча, но, например, за счет движений туловища, позвоночника или плечевых плечевого пояса. Эти движения, в частности, в описанных ситуациях, в которых пользователь спотыкается или падает, имеют наибольшую значимость, чтобы остановить падение и избежать повреждений.
В частности, в основу положено осознание того, что в случае известного из ЕР 3 156 193 А1 устройства шарнирные сочленения нуждаются в неподвижной базовой точке относительно анатомических шарниров (суставов) и поэтому точки вращения жестко зафиксированы посредством рамы.
За счет подвижности элементов передачи усилия относительно вспомогательного опорного элемента в одном предпочтительном выполнении устройства достигается то, что свобода движения по меньшей мере одной из рук, предпочтительно обеих рук, не ограничивается этим устройством.
Если свобода движения руки не ограничивается устройством, то под этим в рамках настоящего изобретения понимается, в частности, то, что каждое движение, которое пользователь устройства может осуществлять без устройства, также является возможным и с этим устройством, так что он в любом случае минимально, то есть не существенно (не значительно), ограничен. Эти движения, в частности, включают в себя антеверсию и ретроверсию, то есть подъем руки вперед и назад, отведение и аддукция, то есть подъем и опускание руки в боковом направлении, и внутреннее вращение и наружное вращений в плечевом суставе. В частности, с помощью соответствующего изобретения устройства возможна циркумдукция в той же степени, как она возможна для соответствующей персоны даже без устройства. Циркумдукция представляет собой обхождение руки вокруг осуществляемых главных движений упомянутых трех шарнирных осей, в частности, при максимальном отклонении движения, при котором получается нерегулярный конус, вершина которого лежит в плечевом шарнире.
Предпочтительным образом, даже движения позвоночника, в частности, наклоны позвоночника вбок и/или вперед и назад и/или поворот позвоночника вокруг его продольной оси, не сковываются, не ограничиваются или не делаются невозможными посредством устройства. Предпочтительным образом, все эти описанные здесь движения за счет указанного устройства не ограничиваются ни в своем максимальном отклонении движения, ни в последовательности движения.
При этом оболочковый элемент для руки является подвижным относительно упомянутого по меньшей мере одного вспомогательного опорного элемента по меньшей мере в трех поступательных и трех вращательных степенях свободы. В то время как устройства из уровня техники в любом случае позволяют вращательные степени свободы, за счет соответствующего изобретению устройства достигается то, что позволяются даже движения оболочкового элемента для руки относительно вспомогательного опорного элемента, которые касаются, например, лишь поступательного смещения вдоль одного пространственного направления. Вследствие этого оболочковый элемент для руки относительно вспомогательного опорного элемент может воспроизводить и совместно совершать движения плеча, которые не происходят исключительно из движений плеча, а требуют, например, движения позвоночника или другой части тела.
В одном предпочтительном варианте осуществления устройства согласно описанному здесь изобретению элемент передачи усилия имеет элемент передачи усилия сжатия, в частности, штангу или направляющую, на котором поддерживающий руку элемент расположен с возможностью поворота вокруг оси поворота. При этом вполне достаточно предусмотреть одно единственное шарнирное сочленение с осью поворота. Сложные надстройки нескольких шарниров, оси поворота которых встречаются в одной точки, предпочтительно виртуально в точке поворота шарового шарнира естественного плеча, являются ненужными. Вследствие этого конструкция сильно упрощается. Кроме того, могут снижаться издержки изготовления.
Предпочтительно шарнир, посредством которого поддерживающий руку элемент соединен с элементом передачи усилия, в надетом состоянии устройства находится в области лопатки, предпочтительно на лопатке пользователя. Однако это, в частности, не означает, что шарнир в надетом состоянии контактирует с телом пользователя, а только то, что этот контакт имелся бы на лопатке пользователя, если шарнир прижимался бы к телу пользователя.
Вспомогательный опорный элемент при эксплуатации устройства прикладывается к предмету, на который должны передаваться действующие усилия. Поскольку пассивный исполнительный орган должен прикладывать усилие к поддерживающему руку элементу, то должна быть предусмотрена соответствующая вспомогательная опора, на которую он может опираться. Пассивный исполнительный орган в смысле настоящего изобретения, в частности, не является двигателем. Требуемая энергия, которая ему необходима для приложения усилия, прикладывается пользователем или носителем устройства. Как правило, усилие, которое должно прикладываться к поддерживающему руку элементу, прикладывается противодействуя силе тяжести. Следовательно, при поднятии руки и соединенного с ней поддерживающего руку элемента энергия извлекается из аккумулятора энергии пассивного исполнительного органа. При противоположном движении, т.е. при опускании руки, это происходит против приложенного усилия. Энергия направляется к аккумулятору энергии пассивного исполнительного органа. Для пассивного исполнительного органа в смысле настоящего изобретения это является единственным источником энергии, если не учитывать настраиваемое предварительное натяжение аккумулятора энергии пассивного исполнительного органа.
Предпочтительно пассивный исполнительный орган включает в себя по меньшей мере один аккумулятор энергии, предпочтительно по меньшей мере один механический аккумулятор энергии. Он может иметь, например, пружинный элемент, аккумулятор давления, пневматическую и/или гидравлическую систему и/или гидравлический аккумулятор энергии. Например, пружинный элемент в виде вращательной пружины или пружины с постоянным усилием может быть расположен непосредственно на шарнире между элементом передачи усилия сжатия и поддерживающим руку элементом. Также являются допустимыми упругие элементы в виде упругих тросов, например резиновых тросов, чьи конца расположены на части поддерживающего руку элемента. Если поддерживающий руку элемент поворачивается вокруг оси поворота относительно элемента передачи усилия сжатия, то упругий элемент растягивается или сжимается так, что энергия направляется к механическому аккумулятору энергии или извлекается из него. Само собой разумеется, что также возможны другие элементы, например, газовые пружины или пружины сжатия, для которых используются отклонение, чтобы из предоставленной посредством пружины сжатия силы сжатия получить тяговое усилие.
Механический аккумулятор энергии может быть расположен в различных позициях устройства. Предпочтительно выбирается позиция, в которой имеется необходимое для аккумулятора энергии конструктивное пространство и сам аккумулятор энергии не мешает при движении рук пользователя. Так, например, он может быть расположен на плече.
В одном предпочтительном выполнении вспомогательный опорный элемент является контактным элементом, в частности ремнем, поясом, бандажом или оболочковым элементом для надевания на часть тела, в частности туловище пользователя. Контактный элемент интегрирован предпочтительно в предмет одежды, например, брюки. Альтернативно или дополнительно к этому вспомогательный опорный элемент имеет по меньшей мере один плечевой элемент для надевания на плечо пользователя. Альтернативно или дополнительно вспомогательный опорный элемент включает в себя по меньшей мере один контактирующий с полом элемент так, что противодействующая сила имеет возможность введения в пол. Такого типа контактирующие с полом элементы выполнены предпочтительно в виде экзоскелетов и сами по себе известны из уровня техники. Он может быть выполненным активно, например, с приводом от двигателя, или пассивно.
Если вспомогательный опорный элемент выполнен в виде контактирующего элемента для туловища пользователя, в частности бедра пользователя, то особенно удобным и комфортным для пользователя образом может отводиться необходимая противодействующая сила. Она вводится в бедренную область в теле пользователя и воспринимается ногами. Использование контактирующего с полом элемента является преимуществом, в частности, тогда, когда устройство используется, чтобы оказать поддержку при подъеме больших нагрузок. Если в этом случае вспомогательный опорный элемент выполнялся бы в виде контактного элемента для туловища, в частности для бедра, пользователя, то возникающая вследствие тяжелой нагрузки сильная дополнительная нагрузка хотя и отводилась бы от плечевой области пользователя, однако, должна была бы по–прежнему проводиться через ноги. Это может устраниться тем, что используется по меньшей мере также контактирующий с полом элемент. При этом является возможным отводить по меньшей мере часть нагрузки, предпочтительно однако всю дополнительную нагрузку, в пол, так что даже ноги и, в частности, колени пользователя не перегружаются. Для этого могут использоваться ортезы, например, активные или пассивные экзоскелеты, как они принципиально известны из уровня техники, которые проходят от бедра через колено и лодыжку к стопе пользователя.
Использование плечевого элемента для надевания на плечо, который может быть выполнен, например, в виде рюкзачных лямок или подтяжек, обеспечивает особенно небольшую конструктивную форму устройства. Однако оно имеет недостаток, что собственно подлежащие отведению от плечевой области усилия вводятся в плечевую область в другом месте, так что эффект по сравнению с использованием другого вспомогательного опорного элемента уменьшается. Само собой разумеется, вспомогательный опорный элемент здесь также может быть упругим или жестким элементом, который должен располагаться на плече или на другой части человеческого тела, в частности, туловища пользователя.
Оказалось преимуществом, что ориентация элемента передачи усилия относительно вспомогательного опорного элемента имеет возможность изменения в результате движения туловища пользователя и/или движения руки. Посредством этого изменения ориентации, например, направления продольной протяженности или углового положения элемента передачи усилия относительно вспомогательного опорного элемента, осуществляется множество, предпочтительно даже все движения и степени свободы, которые не могли вызываться посредством поворотного расположения поддерживающего руку элемента на элементе передачи усилия сжатия. Поскольку изменение ориентации осуществляется просто в результате движения туловища и/или руки пользователя, то гарантировано интуитивное манипулирование. Предпочтительно элемент передачи усилия сжатия посредством шарнира, в частности шарового шарнира или шарнирного соединения, связан с контактным элементом. Точное осуществление этого шарнира зависит от цели пользования и условий, в частности также от индивидуальных предпочтений и пристрастий пользователя. Может использоваться шаровой шарнир, который позволяет поворачивание выполненного, например, как штанга или стрежень элемента передачи усилия сжатия относительно контактного элемента, который выполнен, например, как пояс или ремень. Также посредством такого рода шарнира может обеспечиваться кручение, т.е. вращение элемента передачи усилия сжатия вокруг своей собственной продольной оси. Однако при необходимости является достаточным предусмотреть простое шарнирное соединение, с помощью которого элемент передачи усилия сжатия расположен на контактном элементе. Это, в частности, является достаточным тогда, когда гибкость контактного элемента настолько большая, что, тем не менее, является возможным движение элемента передачи усилия сжатия относительно контактного элемента, из–за которого следует деформация контактного элемента. Поскольку сам контактный элемент выполнен в виде гибкого элемента, то эта деформация ликвидируется при соответствующем движении руки и/или туловища пользователя. Таким образом, даже в этом месте достигается максимально простое соединение между элементом передачи усилия сжатия и контактным элементом.
Шарнир, с помощью которого элемент передачи усилия сжатия расположен на контактном элементе, может быть выполнен различными способами. Он может быть выполнен как поступательная пара или цепное звено или как механизм складывания. Также упругие элементы, например, изгибные пружины, могут использоваться как шарнир и одновременно по меньшей мере также как механический аккумулятор энергии. Само собой разумеется, также может использоваться принцип троса Боудена, например, в виде сжимающе–растягивающейся вилки.
Поддерживающий руку элемент включает в себя оболочковый элемент для руки, который предпочтительно расположен на дистанцирующем элементе. Этот дистанцирующий элемент в виде части поддерживающего руку элемента предпочтительно соединен с элементом передачи усилия сжатия или с элементом передачи усилия. При этом, длины выполненного, например, в виде направляющей (планки) или стержня элемента передачи усилия сжатия и выполненного в случае необходимости также в виде стержня или направляющей дистанцирующего элемента предпочтительно выбраны так, что перекрывается вся угловая область возможного движения плеча носителя. Оболочковый элемент для руки предпочтительно шарнирно расположен на дистанцирующем элементе, чтобы достичь максимально возможного комфорта ношения.
В одном предпочтительном выполнении пассивный исполнительный орган предназначен для того, чтобы прикладывать усилие в зависимости от позиции и/или ориентации упомянутого по меньшей мере одного поддерживающего руку элемента относительно вспомогательного опорного элемента, в частности, в зависимости от угла поворота поддерживающего руку элемента вокруг оси поворота, причем пассивный исполнительный орган прикладывает усилие к поддерживающему руку элементу предпочтительно эксцентрично. Предпочтительно усилие прикладывается к дистанцирующему элементу поддерживающего руку элемента. Вместо, например, пружины постоянного усилия в качестве пассивного исполнительного органа, посредством которой вне зависимости от позиции и углового положения плеча и тем самым также поддерживающего руку элемента всегда прикладывается одинаковое усилие, могут использоваться пассивные исполнительные органы, посредством которых в зависимости от позиции и/или ориентации руки и тем самым поддерживающего руку элемента могут прикладываться различные усилия. Так, например, является преимуществом не прикладывать усилие, если рука не превышает определенный угол относительно нормали, т.е. обусловленное силой тяжести направление. Этот угол может быть, например, 45°, 60° или 90°. Только тогда, когда рука понялась за этот угол, посредством пассивного исполнительного органа предпочтительно прикладывается усилие, которое является противоположно направленным силе тяжести. Это усилие может варьироваться с дальнейшем поднятием, т.е. поворачиванием, плеча и тем самым поддерживающего руку элемента относительно элемента передачи усилия сжатия. Для этого, могут использоваться кулачковые диски, передачи или другие функциональные элементы «усилие–путь», например, кулисы. Максимальное усилие прикладывается предпочтительно в угловом диапазоне от 70° до 120°, особенно предпочтительно при 90°.
Предпочтительно прикладываемое пассивным исполнительным органом усилие к поддерживающему руку элементу имеет возможность изменения посредством изменяемого предварительного натяжения пассивного исполнительного органа и/или посредством настраиваемого эксцентриситета приложения усилия.
В одном предпочтительном выполнении элемент передачи усилия установлен в направляющей, посредством которой предотвращается то, что часть элемента передачи усилия, на которой расположен поддерживающий руку элемент, отдаляется в надетом состоянии устройства от туловища пользователя. В одном особенно конструктивно простом выполнении, в случае направляющей речь идет о петле или втулке, которые предпочтительно выполнены из текстиля. Предпочтительно направляющая служит в качестве позиционирующего вспомогательного приспособления. Движение элемента передачи усилия относительно направляющей является преимуществом, но не необходимостью.
Особенно предпочтительно устройство имеет два поддерживающих руку элемента для поддержания обеих рук, причем оба поддерживающих руку элемента имеют соответственно оболочковый элемент для руки и предпочтительно соответственно расположены с возможностью поворота на элементе передачи усилия и между элементами передачи усилия расположен предпочтительно по меньшей мере один соединительный элемент, в частности натяжной элемент, посредством которого предпочтительно тяговое усилие имеет возможность приложения к упомянутым обоим элементам передачи усилия. Тем самым также предотвращается то, что элементы передачи усилия отдаляются обращенным от вспомогательного опорного элемента концом от тела, в частности от туловища, пользователя. Кроме того, предпочтительно посредством такого тягового элемента оболочковый элемент для руки удерживается на руке носителя и большей частью или полностью предотвращается соскальзывание.
В частности, для случая двух поддерживающих руку элементов и двух элементов передающих усилие они могут располагаться, например, также плоскостно, например, в форме креста. Также могут использоваться несколько опор или пружин, упругие или механические аккумуляторы энергии или другие передающие или прикладывающие усилие элементы. Посредством плоскостного расположения, с одной стороны, достигается то, что устройство в надетом состоянии мало полнит, так что оно при ежедневной работе мало мешает. С другой стороны, достигается то, что элементы передачи усилия скорее следуют за движениями туловища пользователя.
Предпочтительно устройство имеет возможность подгонки к различным размерам тела пользователя. Таким образом, устройство может использоваться разностороннее и гибко, без необходимости содержать для различающихся по габаритам пользователей различные устройства. При этом, например, длина элемента передачи усилия, в частности в виде элемента передачи усилия сжатия, может быть выполнена подгоняемой за счет того, что используются, например, телескопические штанги. Они могут, например, включать в себя быстрозажимное устройство или вращающиеся фиксаторы, так что они легко могут деблокироваться, переставляться в длине и опять блокироваться. Это происходит предпочтительно бесступенчато. Но также возможна ступенчатая настройка. Так, например, могут иметься фиксирующие отверстия, в которые заскакивает подпружиненный изнутри штифт, когда настроена желаемая длина. Для перестановки длины штифт вдавливается в телескопическую штангу и несколько элементов телескопической штанги сдвигаются друг относительно друга.
Само собой разумеется, таким образом также может переставляться в длину дистанцирующий элемент поддерживающего руку элемента. Здесь также может использоваться телескопический механизм или телескопическая штанга. Альтернативно или дополнительно к этому, оболочковый элемент для руки может быть выполнен скользящим на или в дистанцирующем элементе, чтобы достигнуть конгруэнтного баланса. В этом случае при определенных движениях плечевой части руки относительно плеча доходит до движения оболочкового элемента для руки относительно дистанцирующего элемента, так что оболочковый элемент для руки всегда контактирует в одинаковой области с рукой пользователя.
Альтернативно телескопической штанге также для настройки длины и направления на плече могут использоваться проворачивающиеся друг в друге спирали или вращающиеся опоры.
Шарнир, посредством которого элемент передачи усилия расположен на контактном элементе, предпочтительно может быть расположен неподвижно на соответствующем контактном элементе. Если он выполнен в виде ремня или пояса, то его длина может легко настраиваться, вследствие чего позиция шарнира также становится настраиваемым. Шарнир, например, выполненный в виде зажима (клипсы), альтернативно или дополнительно к этому также разъемно соединен или может соединяться с контактным элементом. Альтернативно или дополнительно к этому, он может выполняться с возможностью смещения вдоль направляющей, кулисы или подобного контура смещения. Другие возможности представляют собой расположение в поясной сумке, соединение шарнира через так называемый храповый замок, как он известен, например, из лыжных ботинок, в виде штифтовой застежки или посредством застежки–липучки.
Особенно просто определяется подходящий размер устройства, если устройство интегрировано в предмет одежды, в частности куртку или рубашку. В частности, контактный элемент предпочтительно интегрирован в брюки. В таком случае, должен определяться только подходящий размер одежды для пользователя, так что могут выбираться предметы одежды подходящего размеры.
Поскольку для различных по размеру и различных по силе пользователей посредством пассивного исполнительного органа приложены различные по величине усилия, оказалось предпочтительным, если величина прикладываемого усилия является настраиваемой. Это может осуществляться, например, за счет того, что предварительное натяжение пружинного элемента, например, винтовой пружины, является настраиваемым, например, посредством дискового переключателя или передвижного механизма. Также может настраиваться ослабленная длина пружины, т.е. длина пружины без нагрузки. Альтернативно или дополнительно к этому может иметься несколько пружинный нитей или пружинных элементов, которые имеют возможность активирования по отдельности или вместе и при необходимости, но не обязательно, имеют различные коэффициенты жесткости пружины и твердости. Длина плеча рычага, на котором действует приложенная пассивным исполнительным органом усилие на поддерживающий руку элемент, в частности, на дистанцирующий элемент поддерживающего руку элемента, может также настраиваться и изменяться, например, посредством установочного винта. То же самое справедливо для упора троса Боудена. Настройка может предприниматься механически или мехатронно, например, с приводом от двигателя. Мехатронная настройка является предпочтительной, например, тогда, когда прикладываемое усилие должно быть адаптивно подстраиваемым, например, если в результате удержания предмета, например инструмента, становится необходимым или желательным большее поддерживающее усилие.
Особенно комфортным оказалось, если пружинные элементы и другие механические, гидравлические или пневматические аккумуляторы энергии напрягаются только при надевании устройства. Дополнительно они могут ослабляться при надевании. Это может осуществляться, например, посредством рычагов, петель или разъемных зажимных соединений, которые соединены с соответствующими пружинными элементами и позволяют зажатие пружины, при необходимости, до желаемой степени. Альтернативно или дополнительно к этому могут иметься ползуны, на которых расположен, например, конец пружинного элемента. Посредством смещения ползуна вдоль направляющего элемента пружина или пружинный элемент может напрягаться или ослабляться. Стопорение или фиксация в определенной позиции происходит предпочтительно посредством заклинивания ползуна на направляющем элементе.
Особенно предпочтительным образом оболочковый элемент для руки представляет собой самозакрывающуюся оболочку, которая открыта до тех пор, пока в ней отсутствует рука. Если рука вводится в оболочку, то запускается исполнительный механизм, посредством которого оболочка закрывается (замыкается). Одновременно, посредством этого механизма могут напрягаться пружинные элементы.
Предпочтительно устройство включает в себя блокирующее устройство, посредством которого движение поддерживающего руку элемента имеет возможность, предпочтительно полного, блокирования относительно элемента передачи усилия в по меньшей мере одном направлении.
Предпочтительно между поддерживающими элементами находится по меньшей мере один натяжной элемент, в частности по меньшей мере одна натяжная пружина. Вследствие этого на оба поддерживающих руку элемента оказывается соответствующее тяговое усилие в направлении упомянутого соответственно другого поддерживающего элемента. Вследствие этого неожиданным образом достигается то, что элементы передачи усилия даже при сложных или необычных движениях носителя устройства не отдаляются от туловища носителя. Вследствие этого достигается то, что уменьшается опасность наталкивания конструктивными элементами устройства на предметы или дверные рамы, что уменьшило бы лояльность к устройству.
Предпочтительно, по меньшей мере один из оболочковых элементов для руки, однако предпочтительно оба оболочковых элемента для руки, имеет замыкающий элемент, который может быть выполнен, в частности, в виде ремня. Посредством этого замыкающего элемента оболочковый элемент для руки может замыкаться вокруг руки. Ремень может оборачиваться, например, вокруг руки и закрепляться крепежным элементом, который расположен на одном свободном конце ремня и может быть выполнен, например, в виде застежки–липучки, на противоположном конце оболочкового элемента для руки. Само собой разумеется, возможны также другие формы крепления, например, пряжка, элемент геометрического замыкания, например, в форме кнопочной застежки, или другие замыкающие элементы.
Предпочтительным образом, замыкающий элемент выполнен с возможностью закрепления посредством по меньшей мере одного крепежного элемента на другом элементе устройства, чем оболочковый элемент для руки. При этом этот другой элемент предпочтительным образом представляет собой плечевой ремень или элемент передачи усилия или оболочку одного из этих элементов передачи усилия или вспомогательный опорный элемент. Если в этом случае носитель устройства должен снять устройство, то он вначале должен освободить замыкающий элемент, чтобы обеспечить возможностью извлечения своей руки из оболочкового элемента для руки. В этот момент, традиционным образом, существует опасность того, что за счет удаления руки из оболочкового элемента для руки уменьшается приложенное рукой к поддерживающему руку элементу усилие, в то время как приложенное пассивным исполнительным органом усилие по–прежнему имеется. В этом случае может доходить до быстрого, например, резкого, движения поддерживающего руку элемента вверх, что может приводить к травмированию или повреждению окружающих приборов или предметов. Однако если оболочковый элемента для руки замкнут (заперт) замыкающим (замковым) элементом, то вначале должен освобождаться замыкающий элемент, чтобы можно было извлечь руку из оболочкового элемента для руки. Следовательно, носитель устройства удерживает конец замыкающего элемента в руке и таким образом может по–прежнему прикладывать действующее вниз усилие к оболочковому элементу для руки и, тем самым, к поддерживающему руку элементу. В этом случае, замыкающий элемент, предпочтительным образом, располагается на другом элементе устройства, например, на плечевом ремне. Таким образом, устройство контролируется и – при необходимости – медленно приводиться в своего рода «парковочное положение» без того, чтобы происходило резкое движение.
При надевании подобного рода устройства поступают наоборот. Носитель устройства, который хочет надеть устройство, сначала освобождает замыкающий элемент из другого элемента устройства и таким образом уже может прикладывать усилие к поддерживающему руку элементу, чтобы приводить его в желательную для надевания позицию. При этом он предпочтительным образом не отпускает замыкающий элемент до тех пор, пока рука не будет находиться в оболочковом элементе для руки. Затем замыкающий элемент замыкается вокруг руки и устройство надежно надето.
Предпочтительным образом устройство имеет упор, посредством которого ограничивается движение поддерживающего руку элемента относительно элемента передачи усилия сжатия вокруг оси поворота. Предпочтительным образом, устройство имеет два упора, чтобы ограничивать движение поддерживающего руку элемента вокруг оси поворота относительно соответствующего элемента передачи усилия сжатия. Таким образом предотвращается то, что, например, после превышения вертикальной линии, происходит переворот различных компонентов друг относительно друга.
Предпочтительным образом, упор может приводиться в активную позицию, в которой он ограничивает движение, и в пассивную позицию, в которой он не ограничивает позицию.
Это происходит, предпочтительным образом, за счет того, что упор представляет собой выступ на элементе передачи усилия сжатия. В этом случае элемент передачи усилия сжатия может просто вращаться вокруг своей продольной оси, чтобы выступ приводился в активную или в пассивную позицию.
Предпочтительным образом, вспомогательный опорный элемент имеет закрывающийся посредством замка ремень, который выполнен с возможностью обвода вокруг туловища носителя. Такой ремень представляет собой самостоятельное изобретение и может использоваться отдельно или в качестве части устройства, в частности, в качестве ортеза или протеза. Так, подобный ремень может быть обведен также вокруг другой части тела носителя устройства или вокруг предмета. Такой ремень имеет преимущество, например, всегда, когда напряжение действует на ремень в закрытом состоянии, так что ошибочное открытие ремня приводило бы к резкому и неконтролируемому ослаблению напряжения. При этом, речь идет, например, о набедренном или поясном ремне. Замок, при этом, выполнен так, что необходимы по меньшей мере два шага для открытия или закрытия замка. Если в качестве замка используется, например, лишь один защелкивающийся замок, который может ослабляться, например, за счет приведения в действие одного или двух исполнительных элементов, то существует опасность того, что ввиду действующих на исполнительные органы усилий концы ремня ускоряются прочь друг от друга и ударяются об окружающие предметы и людей. Чтобы предотвратить это, замок образован двухступенчатым.
Предпочтительным образом, один конец ремня должен направляется через расположенную на другом конце проушину прежде, чем произойдет геометрическое замыкание двух ответно выполненных элементов геометрического замыкания, чтобы закрыть замок. При этом на конце, который проводиться через проушину, предпочтительным образом, находится один из упомянутых обоих элементов геометрического замыкания. Для открытия замка сначала должно ослабляться геометрическое замыкание, а затем один из упомянутых концов ремня направляется через упомянутую проушину, причем упомянутый элемент геометрического замыкания вновь направляется через проушину.
Предпочтительным образом исполнительный орган имеет по меньшей мере один упругий элемента, а устройство – по меньшей мере один контактный элемент, который при предварительно определенном угле между поддерживающим руку элементом и элементом передачи усилия прилегает к упругому элементу и, таким образом, изменяет прикладываемое к поддерживающему руку элементу усилие. Этот упругий элемент при перемещении поддерживающего руку элемента относительно элемента передачи усилия прикладывает усилие, так как он растягивается или сжимается. Предпочтительным образом, поддерживающий элемент установлен с возможностью поворота относительно элемента передачи усилия и точки воздействия приложенного посредством упругого элемента усилия расположена эксцентрично относительно оси вращения соответствующего шарнира. Следовательно, при повороте поддерживающего руку элемента относительно элемента передачи усилия изменяется направление приложенного упругим элементом усилия. Контактный элемент, который предпочтительным образом расположен на шарнире, при этом расположен, в частности, так, что при предварительно определенном угле входит в контакт с упругим элементом. С этого момента действующее на точку воздействия усилие больше не определяется из направления между точкой воздействия и второй опорной точкой упругого элемента, а определяется направлением между точкой воздействия и точкой, на которой контактный элемент прилегает к упругому элементу. Если эта точка максимально близка к оси вращения, предпочтительно, находится точно на оси вращения, то усилие, которое прикладывается посредством части упругого элемента, проходит почти или точно аксиально, так что никакого вращающего момента больше не прикладывается к поддерживающей руку части. Посредством смещения или изменения положения контактного элемента может настраиваться это усилие.
Следовательно, предпочтительным образом, предварительно определенный угол и/или изменение подлежащего приложению усилия может настраиваться за счет того, что предпочтительным образом контактный элемент выполнен с возможностью смещения относительно поддерживающего руку элемента и/или элемента передачи усилия. Это может происходить, например, за счет того, что контактный элемент выполнен с возможностью смещения в кулисе и, например, с возможностью фиксации посредством винта.
Далее более подробно поясняется пример осуществления настоящего изобретения с помощью приложенных чертежей, которые показывают:
Фиг.1 схематичное изображение устройства согласно первому примеру осуществления настоящего изобретения в надетом состоянии,
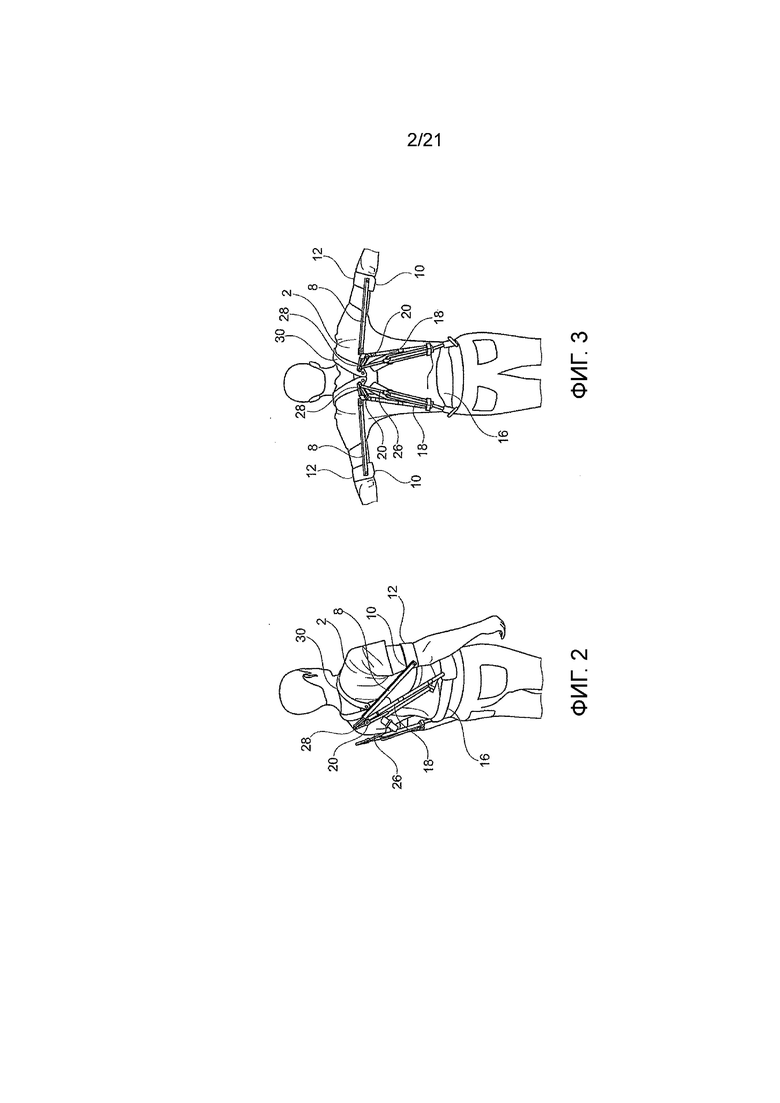
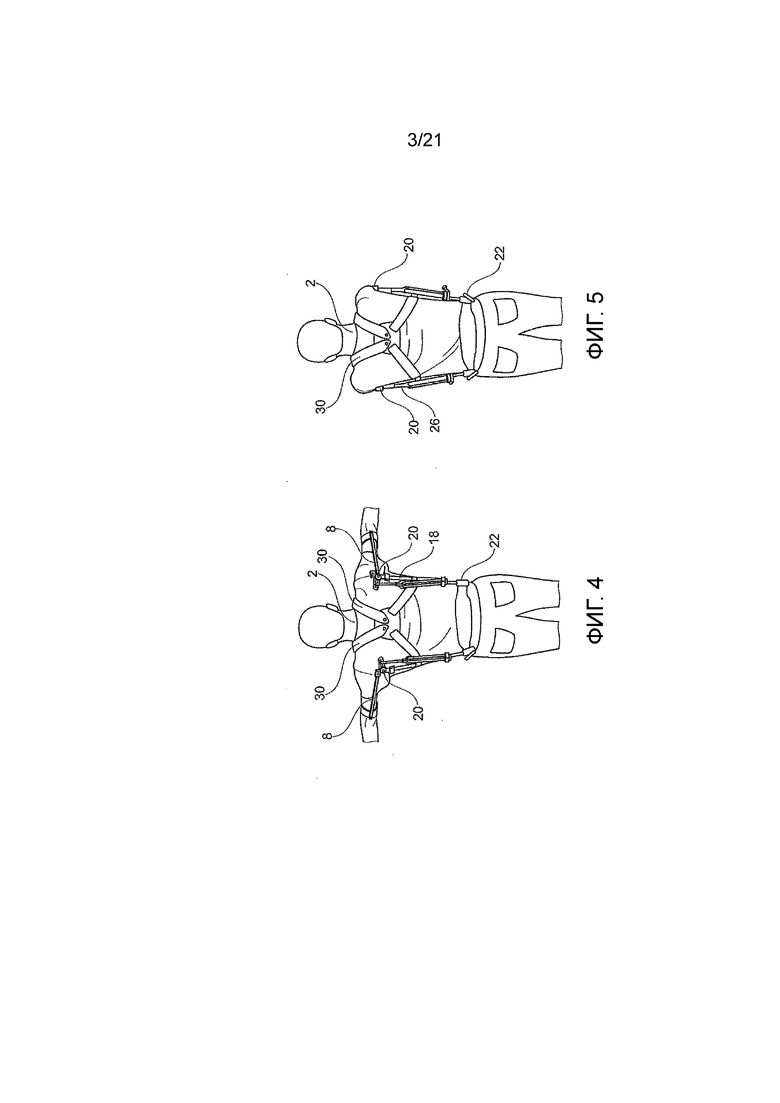
Фиг.2–6 изображение надетого устройства в различных положениях на виде сбоку,
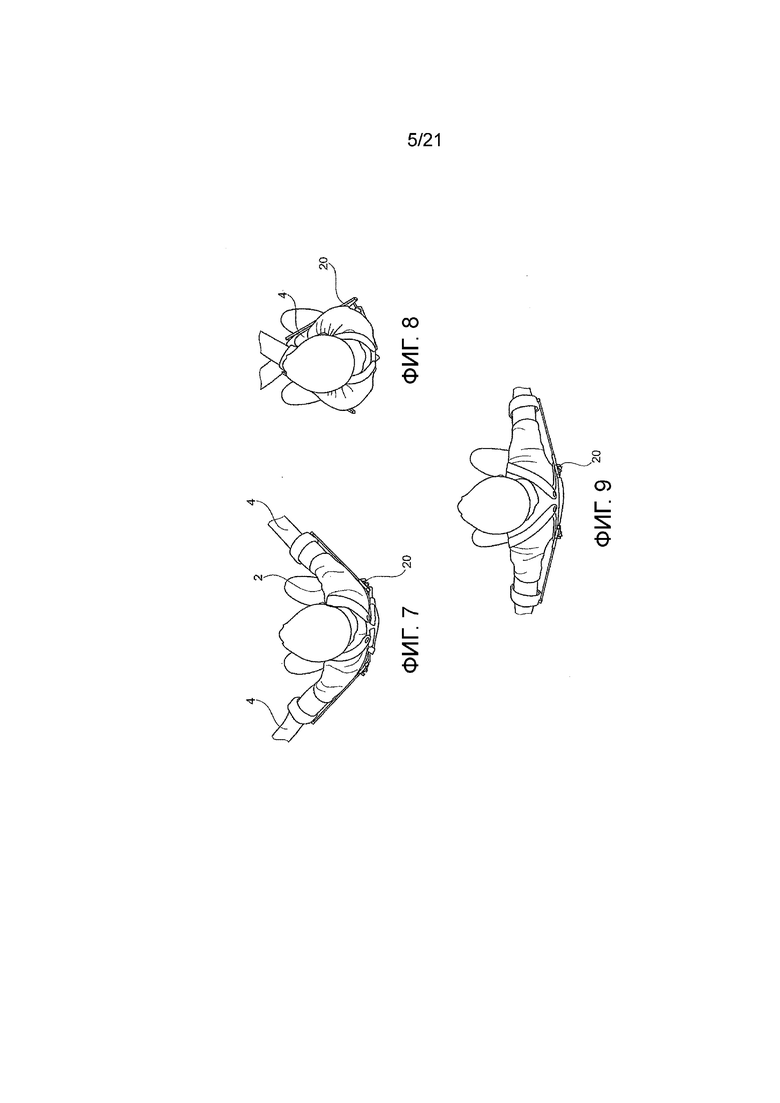
Фиг.7–9 изображения надетого устройства на виде сверху,
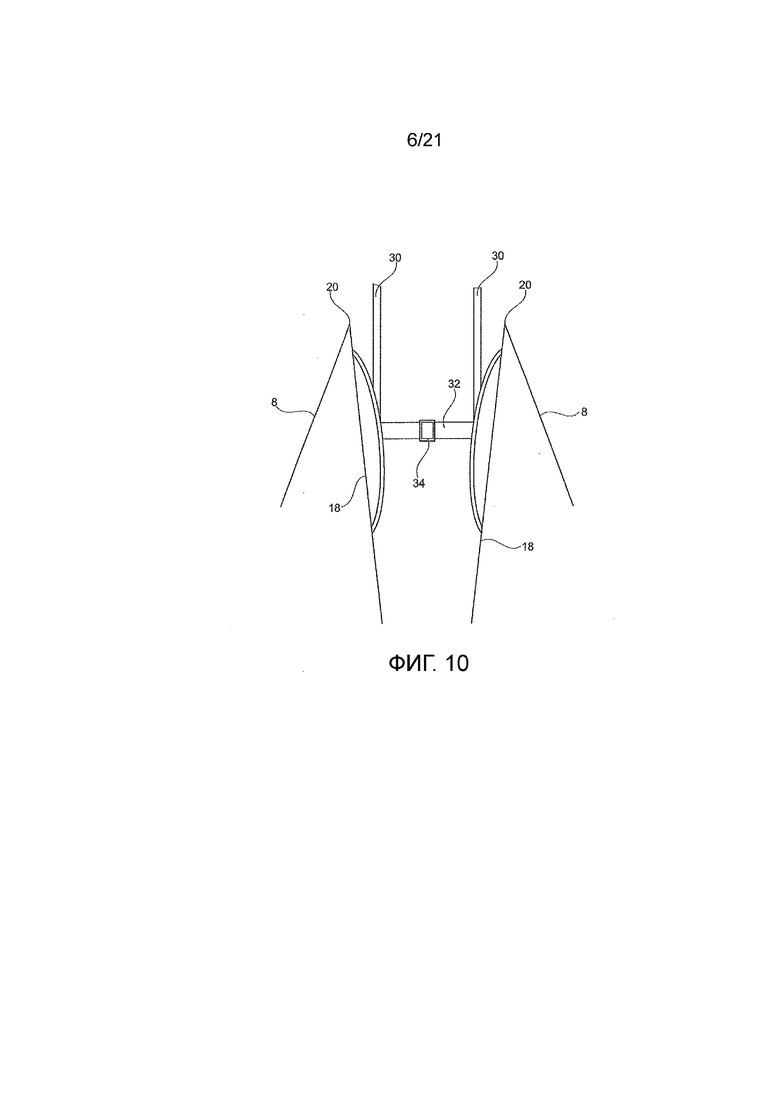
Фиг.10 схематичное изображение устройства согласно другому примеру осуществления настоящего изобретения,
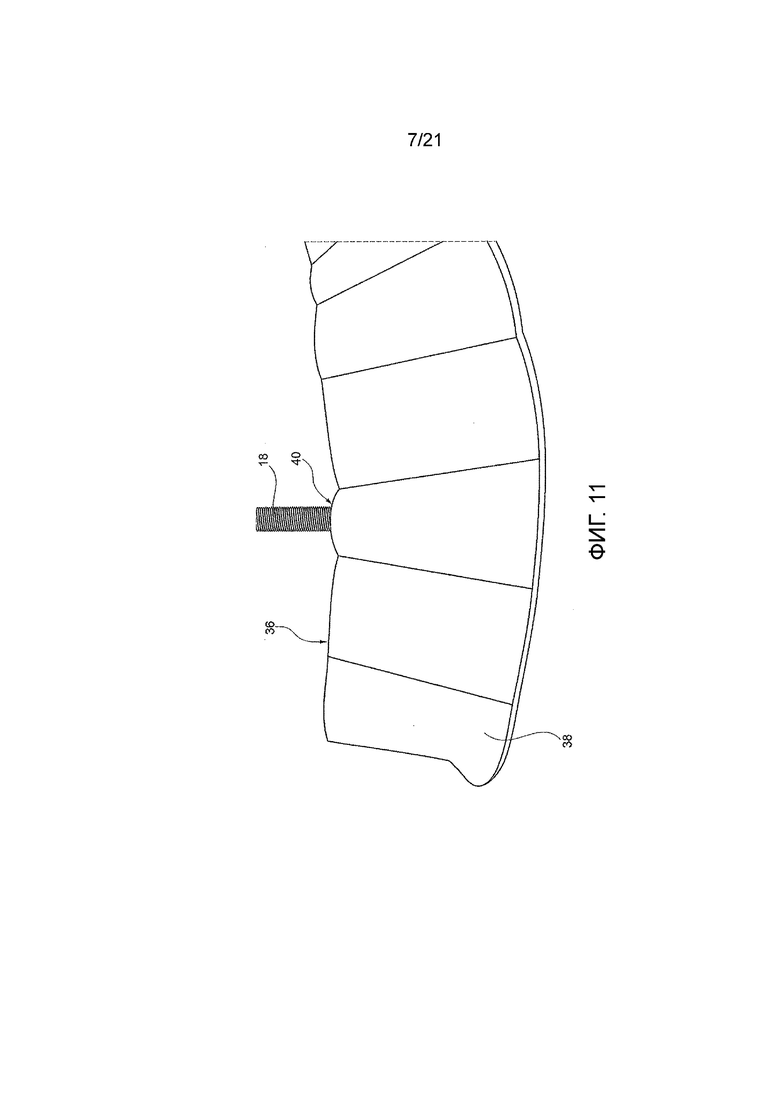
Фиг.11 схематичное изображение фрагмента устройства,
Фиг.12–15 схематичные изображения устройств согласно другим примерам осуществления настоящего изобретения,
Фиг.16 и 17 примерные изображения распределений усилия,
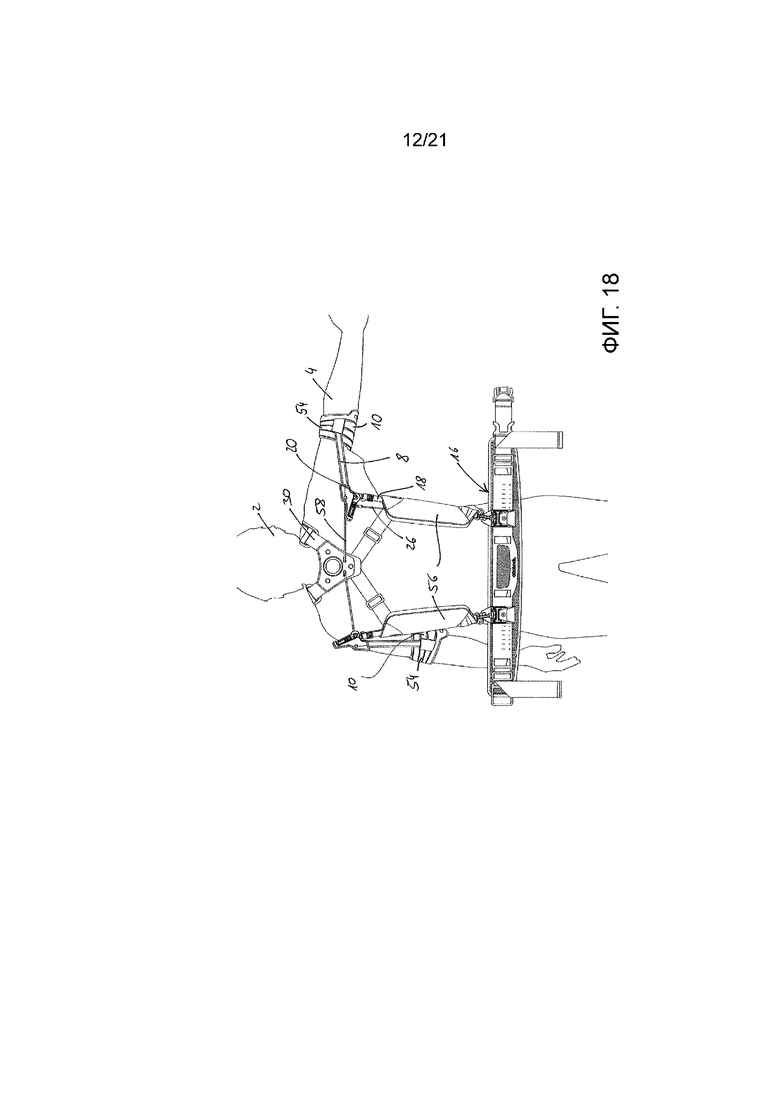
Фиг.18 схематичное изображение надетого устройства,
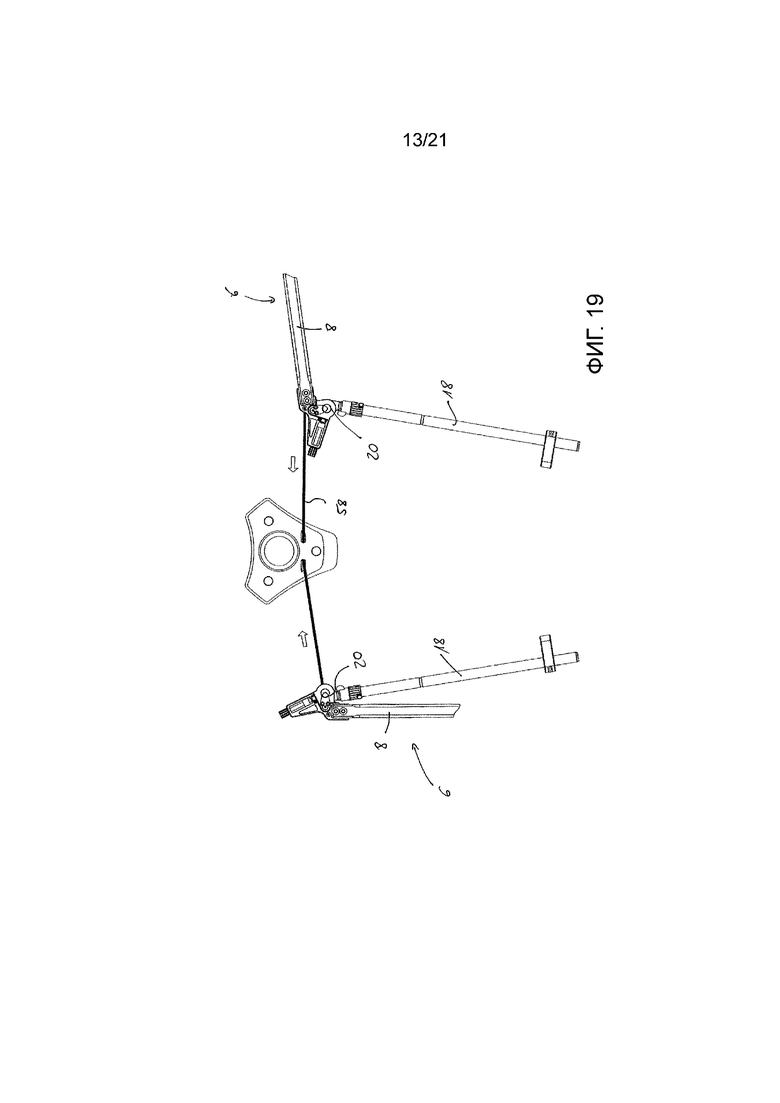
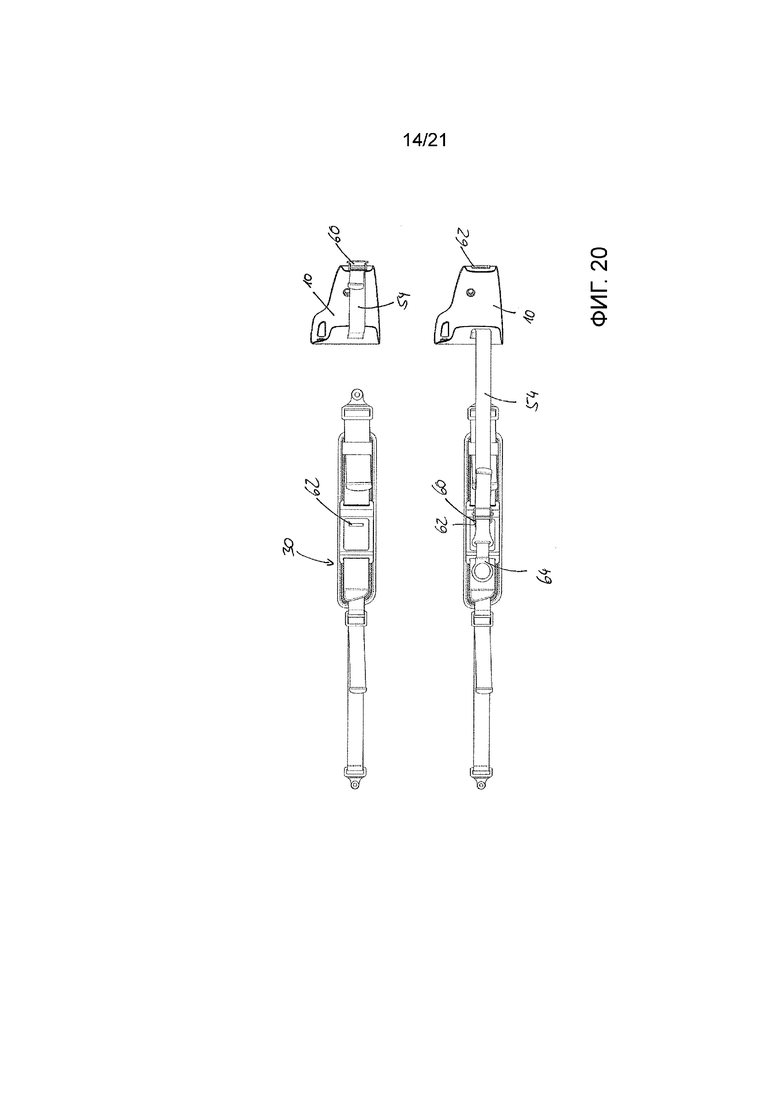
Фиг.19 и 20 схематичные изображения отдельных элементов устройства,
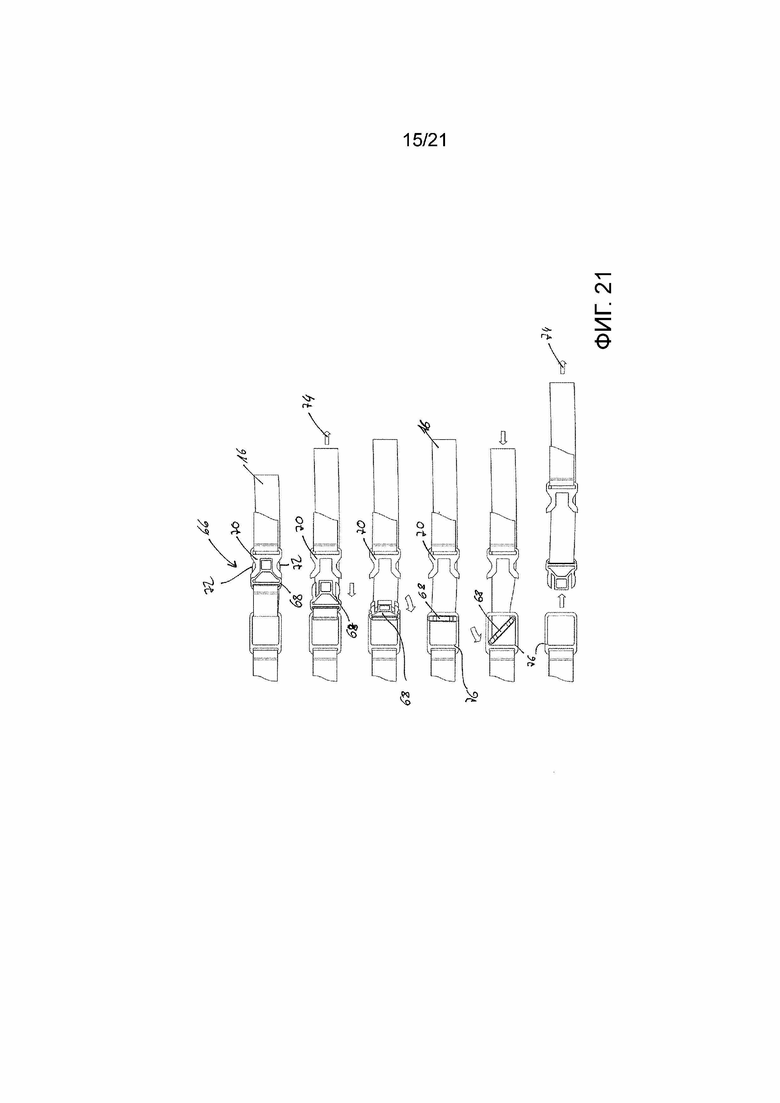
Фиг.21 различные этапы для разъединения ремня,
Фиг.22 и 23 различные виды упоров,
Фиг.24–26 разные типы настройки приложенного усилия,
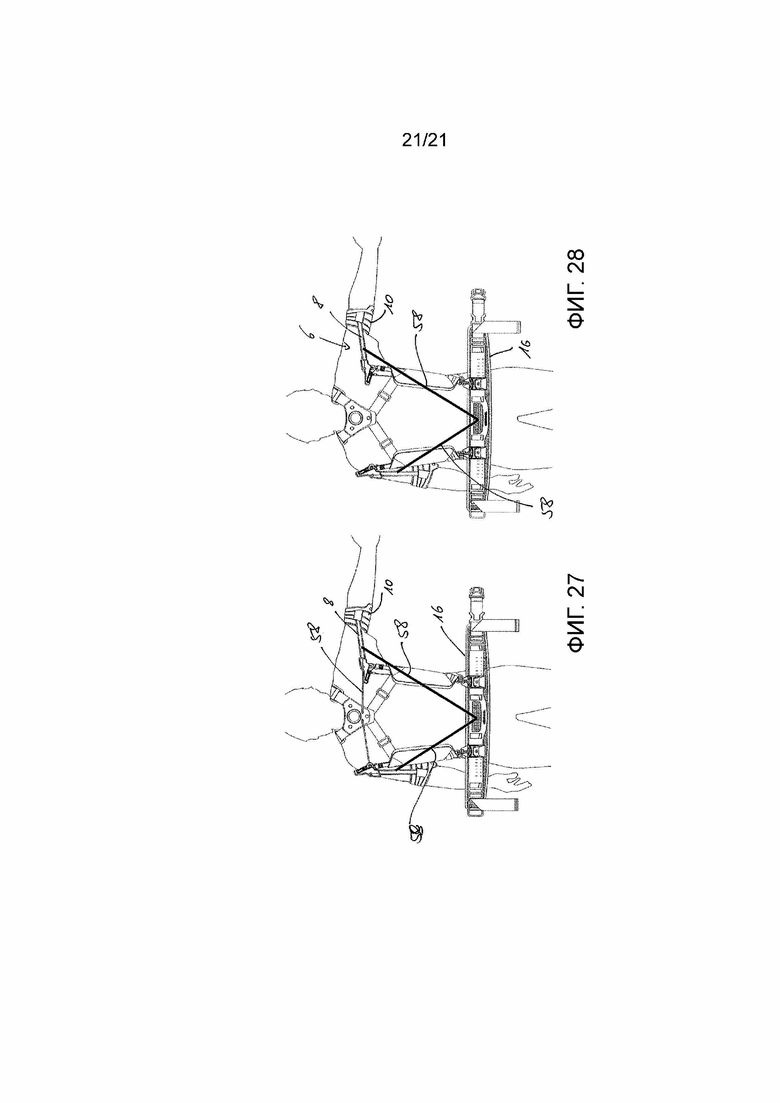
Фиг.27 и 28 другие варианты осуществления изобретения.
Фиг.1 показывает пользователя 2, который носит устройство для поддержания руки 4. Устройство включает в себя поддерживающий пуку элемент 6, который имеет дистанцирующий элемент 8 и оболочковый элемент 10 для руки. На своем дистальном конце подпирающий руку элемент 6 через манжету 12 размещен на руке 4.
Кроме того, устройство включает в себя вспомогательную опору 14, которая имеет вспомогательный опорный элемент 16 и элемент 18 передачи усилия. Дистанцирющий элемент 8 поддерживающего руку элемента 6 через шарнир 20 размещен на верхнем на фиг.1 конце элемента 18 передачи усилия. Он выполнен в виде штанги. В показанном примере осуществления элемент 18 передачи усилия является телескопический штангой. Элемент 18 передачи усилия своим нижним концом в показанном примере осуществления посредством шарового шарнира 22 расположен на вспомогательном опорном элементе 16. Вспомогательный опорный элемент 16 служит для того, чтобы передавать возникающие усилия в стабильный элемент. Он может прилегать к полу, предмету или части тела. В показанном примере осуществления вспомогательный опорный элементом 16 представляет собой набедренный ремень, который в набедренной области прилегает к пользователю 2. Посредством настроечного устройства 24 настраивается длина вспомогательного опорного элемента 16. Это является преимуществом, с одной стороны, для комфорта пользователя 2 и, с другой стороны, для как максимально точного позиционирования шаровых шарниров 22 на теле пользователя 2.
Кроме того, показанное на фиг.1 устройство включает в себя пассивный исполнительный орган 26, который в показанном примере осуществления изобретения выполнен в виде натяжной пружины. Нижний на фиг.1 конец пассивного исполнительного органа 26 расположен на элементе 18 передачи усилия, в то время как противолежащий конец воздействует на рычажный элемент 28 дистанцирующего элемента 8 поддерживающего руку элемента 6. Посредством пассивного исполнительного органа 26 усилие прикладывается к рычажному элементу 28 и тем самым к дистанцирующему элементу 8 поддерживающего руку элемента 6, которое противодействует силе тяжести и поддерживает руку пользователя 2.
Показанное на фиг.1 устройство включает в себя два поддерживающих руку элемента 6, две вспомогательные опоры 14 и два пассивных исполнительных органа 26, из которых для наглядности было описано только по одному представителю.
Фиг.2–6 показывают устройство согласно примеру осуществления настоящего изобретения в надетом состоянии, причем пользователь 2 выполнял различные движения. Фиг.2 показывает расслабленную позу пользователя 2, в то время как на фиг.3 пользователь 2 виден с разведенными руками. Соответствующий оболочковый 10 для руки зафиксирован на руке посредством манжеты 12 и совместно с дистанцирующим элементом 8 образует поддерживающий руку элемент 6. Через шарнир 20 он соединен с элементом 18 передачи усилия, причем соответствующие элементы 18 передачи усилия расположены на вспомогательном опорном элементе 16 в виде набедренного ремня. На шарнире 20 находится рычажный элемент 28, на который воздействует пассивный исполнительный орган 26.
На фиг.2 при расслабленном стоянии можно отчетливо видеть, что шарнир 20 отдаляется назад от тела пользователя 2. Если пользователь раскинет руки, как изображено на фиг.3, то соответствующий шарнир 20 смещается к телу пользователя 2. В показанном примере осуществления шарнир 20 находится в области плечевого сустава. Кроме того, устройство включает в себя два плечевых ремня 30, посредством которых устройство удерживается на теле. Они не служат для удержания шарнира 20 на предопределенном расстоянии от тела.
Фиг.4 показывает в сравнении с фиг.3 дальнейшее поднимание рук. Кроме того, руки на фиг.4 и 5 направляются пользователем дальше вперед. Можно видеть, что оба шарнира 20 отдаляются друг от друга и, в частности, не соединены с плечевыми ремнями 30, чтобы удерживаться на предопределенном расстоянии (дистанции). Наоборот, шарниры 20, а также элементы 18 передачи усилия и дистанцирующие элементы 18, которые соединяются друг с другом посредством шарниров 20, перемещаются наружу и являются почти полностью свободно перемещаемыми. Можно видеть, что устройство обходится без сложных склонных к ошибкам шарнирных механизмов или неподвижных направляющих систем. В то время как шарниры 20 на фиг.3 и 4 находятся еще сзади тела пользователя 2 в области лопатки, на фиг. 5 они уже передвинуты в результате движения тела к бокам пользователя 2 и могут таким образом следовать за движением. Фиг.6 показывает изображенное на фиг.5 положение на виде сбоку. Руки 4 пользователя 2 перекрещиваются, и шарниры 20 находятся в показанном изображении на фиг.6 около плечей пользователя 2. Одновременно шаровые шарниры 22, с помощью которых элемент 18 передачи усилия расположен на вспомогательном опорном элементе 16, не изменялись. Положение этих шаровых опор 22 вне зависимости от движения рук 4 пользователя 2 остается неизменным. Подобного рода свобода движения при такого рода незначительных конструктивных затратах едва ли возможна с помощью устройств из уровня техники.
Фиг.7–9 показывают различные положения пользователя 2 и его рук 4 на виде сверху. На фиг.9 руки широко разведены и через положения на фиг.7 и 8 направляются вперед до тех пор, пока они не скрестятся на фиг.8. Можно видеть, как шарниры 20 переходят наружу от фиг.9 через фиг.7 к фиг.8 и при этом всегда прилегают близко к телу пользователя 2.
Фиг.10 показывает схематичное изображение устройства согласно одному примеру осуществления изобретения. Можно видеть дистанцирующие элементы 8, которые через шарниры 20 соединены с элементами 18 передачи усилия. В отличие от показанных на фиг.2–9 примеров осуществления, теперь между обоими элементами передачи усилия находится один соединительный элемент 32, который выполнен в показанном примере осуществления в виде эластичного ремня. Посредством застежки (пряжка) 34 настраивается длина ремня так, что может настраиваться прикладываемое тяговое усилие.
Также изображены оба плечевых ремня 30, с помощью которых устройство 1 может располагаться на теле пользователя 2. Вспомогательный опорный элемент не изображен. Он показан на фиг.11. Он включает в себя другой ремень 36, который на обращенной к телу стороне имеет подкладку 38, чтобы обеспечить максимально высокий комфорт при ношении. Элемент 18 передачи усилия введен в предусмотренный для этого карман 40 и может поворачиваться в нем, так что выполняется функция шарового шарнира. Этим конструктивно особенно простым способом можно отказаться от сложных шарнирных систем.
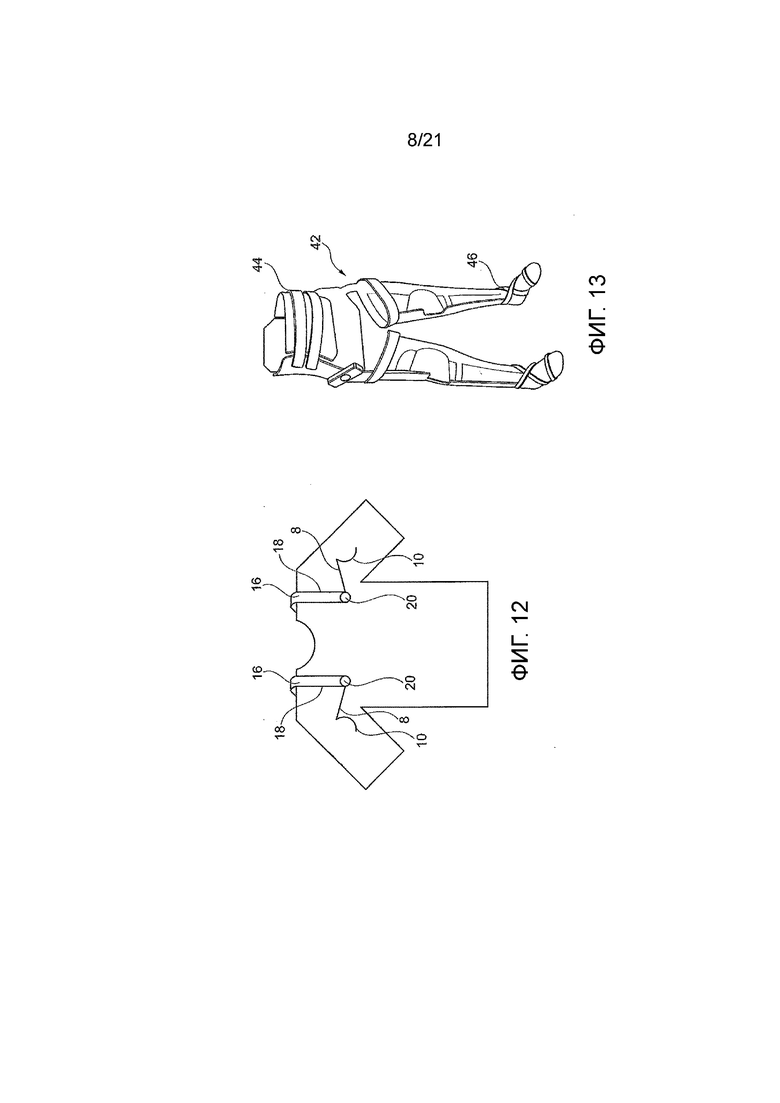
Фиг.12 показывает схематичное изображение, в котором устройство интегрировалось в предмет одежды, в данном случае футболку. Вспомогательный опорный элемент 16 состоит теперь из двух плечевых элементов, которые посредством элементов 18 передачи усилия и соответствующих шарниров 20 соединены с дистанцирующими элементами 8 и оболочковыми элементами 10 для руки. Вследствие того, что устройство интегрировано в футболку, оно особенно легко надевается и снимается, так что не требуется никаких сложных манипуляций. Вследствие этого увеличивается лояльность к устройству.
Фиг.13 показывает экзоскелет 42, который имеет различные направляющие и шарниры, посредством которых усилие от набедренного элемента 44 может вводиться в предусмотренные для этого контактирующие с полом элементы 46.
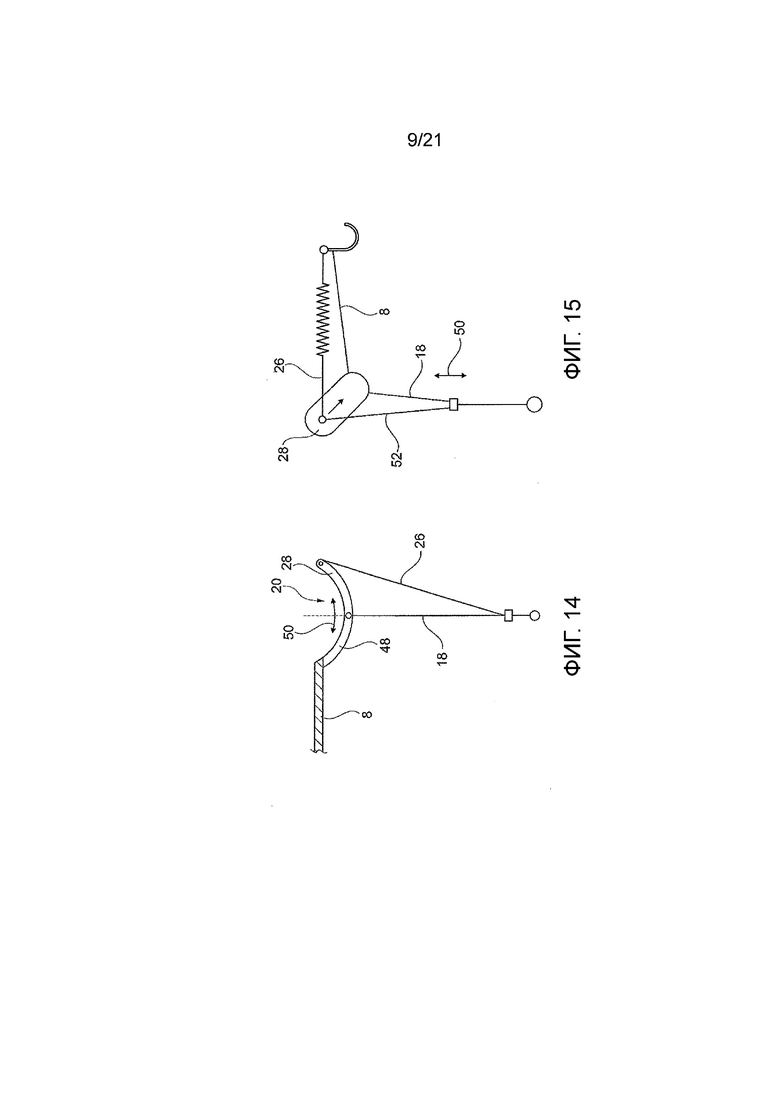
Фиг.14 показывает схематичное изображение другого выполнения шарнира 20. Поворотный рычаг 48 соединяет дистанцирующий элемент 8 и элемент 18 передачи усилия, верхний на фиг.14 конец которого установлен с возможностью смещения в непоказанном продольном отверстии или кулисе. При поворачивании теперь смещается место шарнирного соединения элемента 18 передачи усилия на поворотном рычаге 48 в направлении двойной стрелки 50. Вследствие этого также изменяется длина рычажного элемента 28, так что введенное посредством пассивного исполнительного органа 26 усилие также изменяется.
Фиг.15 показывает другое выполнение, у которого теперь в отличие от прежних примеров осуществления пассивный исполнительный орган 26 расположен не между рычажным элементом 28 и элементом 18 передачи усилия, а между рычажным элементом 28 и дистанцирующим элементом 8. Посредством обратный натяжитель 52, положение которого может смещаться на элементе 18 передачи усилия вдоль двойной стрелки 50, предварительное натяжение накладывается на пассивный исполнительный орган 26.
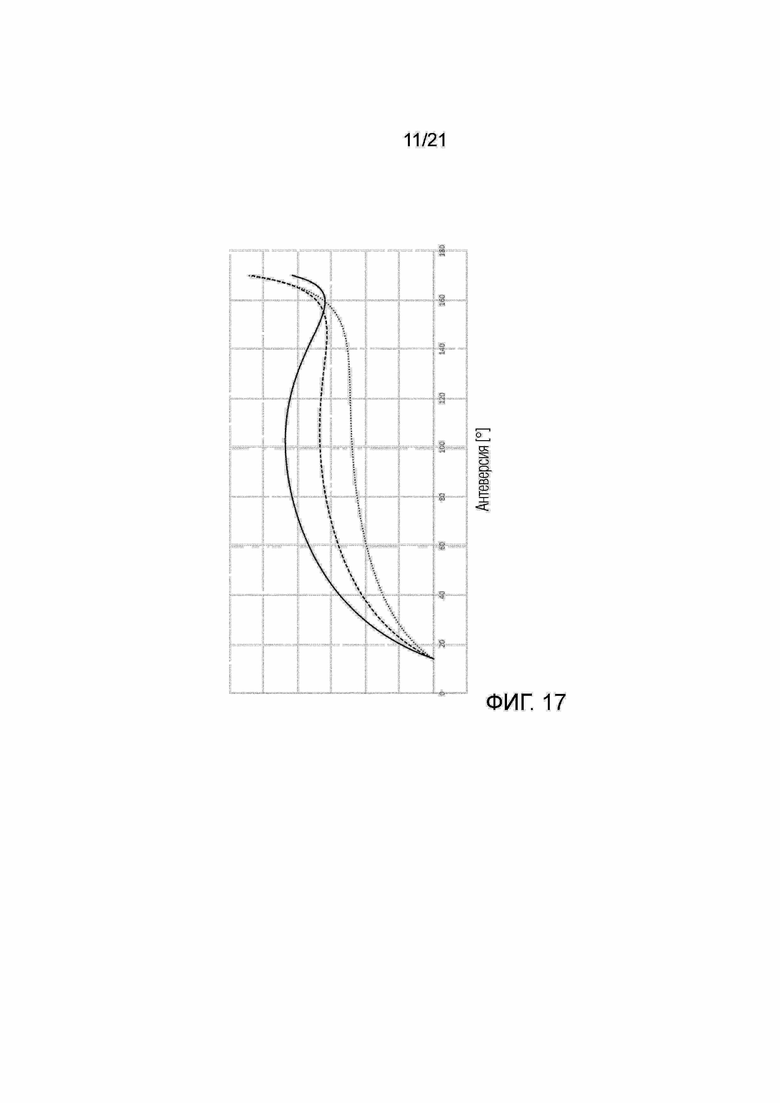
Фиг.16 и 17 показывают различные схемы распределения усилия, которые посредством устройства согласно примерам осуществления настоящего изобретения могут накладываться на руку. На оси Х отложен антеверсионный угол. Антеверсия представляет собой подъем руки в сагиттальной плоскости, т.е. в настоящем примере вперед. Угол 0° соответствуют расслабленно свешенной вниз руке. На фиг.16 можно видеть, что лишь с предопределенного угла сила вообще может накладываться. На оси Y отложено отношение вращающих моментов. Вызванный в результате собственного веса руки и силы тяжести вращающий момент делился на приложенный устройством вращающий момент.
Различные схемы распределения нагрузки выполнены с возможностью практически индивидуальной настройки и в показанном примере осуществления осуществлялись посредством одного единственного пассивного исполнительного органа 26, который предварительно напряжен в различной степени. В то время как пунктирные линии создавались пассивным исполнительным органом 26, который почти не имеет предварительного натяжения, предварительное натяжение увеличивается по штриховой линии и сплошной линии.
Фиг.17 также показывает прикладываемое к руке усилие под углом антеверсии, причем теперь, однако, остается неизмененным предварительное напряжение исполнительного элемента. Вместо этого смещается место шарнирного соединения, через которое пассивный исполнительный орган передает свое усилие на поддерживающий элемент 6. При этом, расстояние точки силового сочленения от точки вращения шарнира 20 увеличивается от пунктирной линии через штриховую линию к сплошной линии. Можно видеть, что также таким образом увеличение усилия может достигаться посредством другого углового диапазона, однако, в частности при больших углах от приблизительно 150°, возникает значительно другая схема распределения, чем это имеет место на изображенных на фиг.16 схемах распределения.
Фиг.18 показывает устройство в почти надетом состоянии. Вспомогательный опорный элемент 16 в виде набедренного ремня еще открыт, в то время как оболочковые элементы 10 для руки с помощью замыкающего элемента 54 уже замкнуты вокруг руки 4 пользователя 2. Дистанцирующие элементы 8 посредством шарнира 20 расположены на соответствующем элементе 18 передачи усилия, который расположен в оболочке 58. Пассивный исполнительный орган 26 выполнен в виде упругого троса или проволоки. На дистанцирующих элементах 8 расположен натяжной элемент 58, который соединяет друг с другом оба дистанцирующих элемента 8 и, тем самым, оба поддерживающих руку элемента 6. Кроме того, устройство включает в себя плечевые ремни 30, через соединительный элемент которых направлен натяжной элемент 58.
Элементы этого выполнения изображены на фиг.19. На обоих элементах 18 передачи усилия расположено по дистанцирующему элементу 8 соответствующего поддерживающего руку элемента 6 с возможностью поворота вокруг соответствующего шарнира 20. Между обоими дистанцирующими элементами 8 находится натяжной элемент 58, который проходит через соединительный элемент между плечевыми ремнями, которые не изображены.
Фиг.20 показывает в верхней области один из плечевых ремней 30, а также оболочковый элемент 10 для руки с расположенным на нем замыкающим элементом 54. Замыкающий элемент 54 включает в себя крепежный элемент 60 в виде застежки, которая может взаимодействовать с показанной в нижней части фиг.20 проушиной 62, чтобы оболочковый элемент 10 для руки закреплять вокруг не изображенной руки. Плечевой ремень 30 включает в себя выполненную аналогично проушину 62. В нижней области фиг.20 изображен замыкающий элемент 54 в раскрытом состоянии. Оболочковый элемент 10 для руки уже не полностью замкнут вокруг руки. Крепежный элемент 60 теперь вставлен в проушину 62 плечевого ремня 30, и таким образом может надежно устанавливаться. На конце замыкающего элемента 54 находится захватный элемент 64, посредством которого замыкающий элемент 54 может легко захватываться.
Фиг.21 показывает различные фазы при раскрытии замка 66 вспомогательного опорного элемента 16, который выполнен, например, в виде набедренного ремня. Такой ремень является предпочтительным также для других объектов и представляет собой в отдельности или в виде части устройства, в частности ортеза или протеза, самостоятельное изобретение. Самое верхнее изображение показывает замок 66 в закрытом состоянии. Он включает в себя застежку, фиксирующий элемент 68 которой взаимодействует с геометрическим замыканием с предусмотренным для него фиксирующим приемным элементом 70. В результате сжатия двух исполнительных элементов 72 фиксирующий элемент 68 и фиксирующий приемный элемент 70 отделяются друг от друга, как это изображено на втором изображении сверху. Вдоль стрелки 74 прикладывается тянущее усилие. На третьем изображении сверху изображено, что в результате этого тянущего усилия фиксирующий элемент 68 опрокидывается до тех пор, пока он не встанет в почти перпендикулярное положение относительно плоскости чертежа, как это показано на четвертом изображении сверху. Дальнейшее отдаление обоих концов вспомогательного опорного элемента 16 друг от друга является невозможным, поскольку фиксирующий элемент 68 в этом положении не проходит через проушину 76. Для этого сначала фиксирующий элемент 68 должен опрокинуться, как это показано на втором снизу изображении. Лишь в этом положении он проходит через проушину 76 и оба элемента могут отделиться друг от друга, если усилие прикладывается вдоль стрелки 74, как это изображено на самом нижнем изображении. Вследствие этого в замок 66 вводится защита, посредством которой предотвращается то, что исключительно за счет приведения в действие исполнительных элементов 72 выполняется полное разъединение и за счет этого обратное заскакивание или обратный проскок отдельных концов вспомогательного опорного элемента 16.
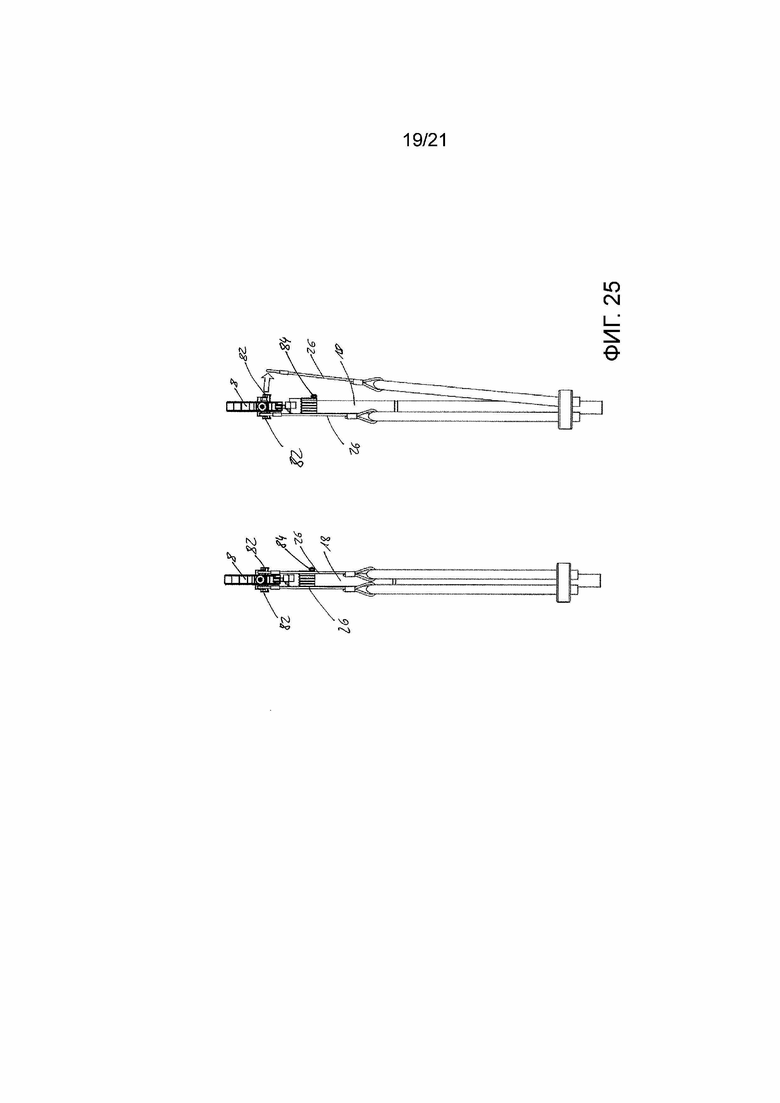
Фиг.22 на левом изображении опять показывает элемент 18 передачи усилия, дистанцирующий элемент 8, а также пассивный исполнительный орган 26. Кроме того, в области шарнира 20 имеется контактный элемент 78, который на левом изображении фиг.22 еще не прилегает к упругому элементу, который действует в качестве пассивного исполнительного органа. Это иначе имеет место на правом изображении фиг.22. Можно видеть, что контактный элемент 78 прилегает к действующему в качестве пассивного исполнительного органа упругому элементу. Поскольку контактный элемент 78 предпочтительно находится точно на оси поворота шарнира 20, то за счет контакта между упругим элементом и контактным элементом 78 предотвращается то, что упругий элемент прикладывает усилие к поддерживающему руку элементу 6, которое создает вращающий момент на поддерживающем руку элементе 6. Упругий элемент посредством прилегающего контактного элемента 78 делится на две части, которые соответственно хотя и оказывают усилие, однако не могут создавать никакого вращающего момента, поскольку усилия направлены радиально на ось поворота шарнира 20. Угол между поддерживающим руку элементом 6 и элементом 18 передачи усилия, при котором контактный элемент 78 прилегает к упругому элементу, предпочтительно является настраиваемым. В таком случае, дальнейшее поворачивание поддерживающего руку элемента 6 по часовой стрелке происходит без того, чтобы эластичным элементом, т.е. пассивным исполнительным органом, прикладывалось какое–либо усилие к поддерживающим руку элементу 6.
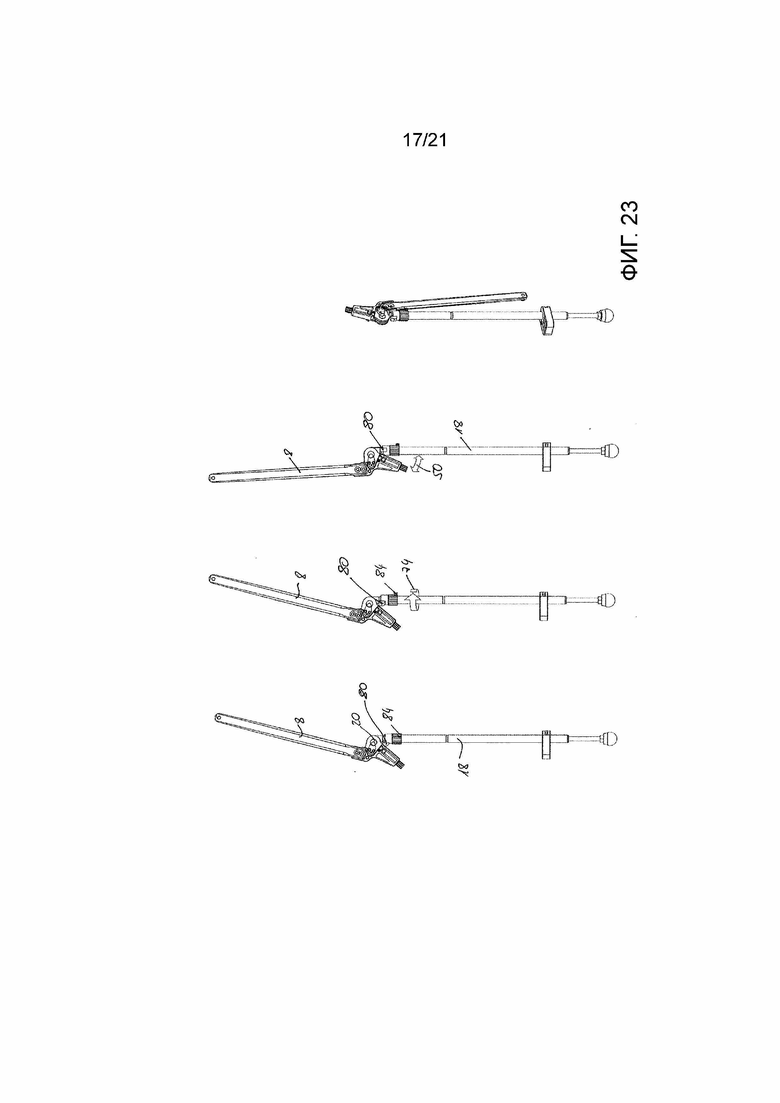
Фиг.23 показывает ситуацию на левом изображении. Упором 80 предотвращалось бы дальнейшее поворачивание промежуточного элемента 8 относительно элемента 18 передачи усилия вокруг шарнира 20. Если устройство должно, например, складываться или выступ 80 должен приводиться в пассивное положение, то выступ 80, как показано на втором изображении слева, вдоль стрелки 74 выводится из зацепления с дистанцирующим элементом 8. Теперь, как изображено на втором изображении справа, вдоль двойной стрелки 50 в обоих направлениях дистанцирующий элемент 8 может поворачиваться совершенно свободно относительно элемента 18 передачи усилия и таким образом приводиться в изображенное совсем справа положение.
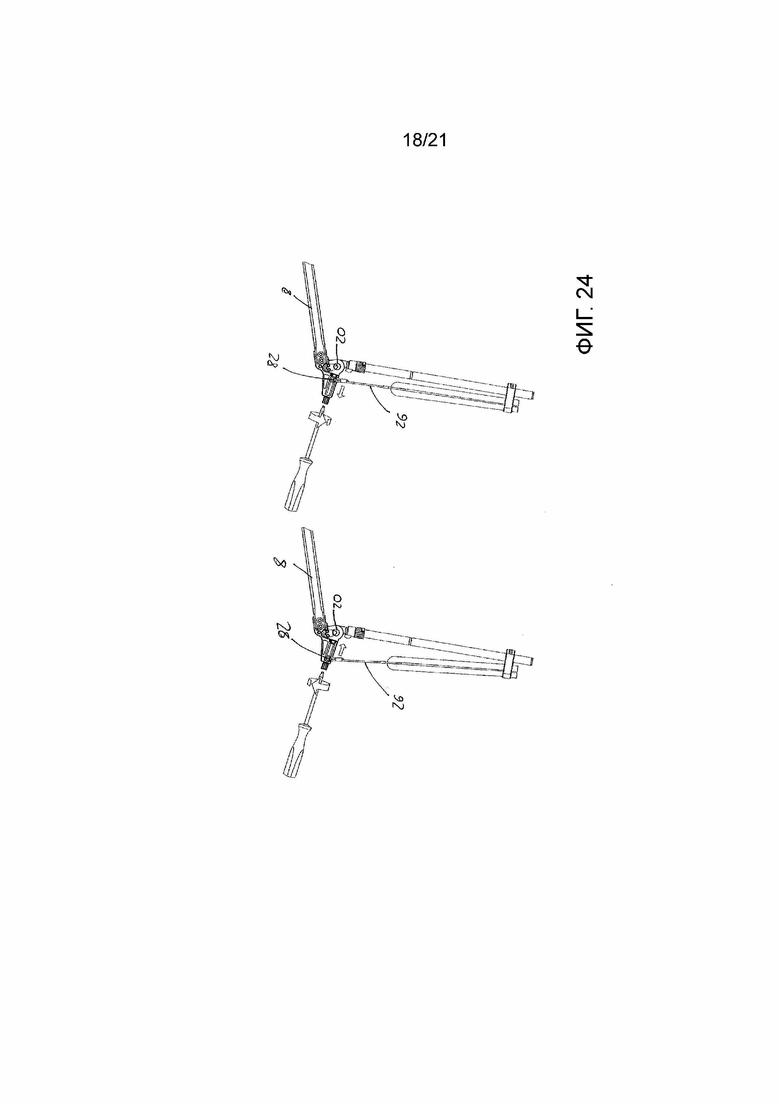
Фиг.24 показывает возможность реализации настраиваемого усилия, которое прикладывается посредством пассивного исполнительного органа 26. Пассивный исполнительный орган в точке 82 приложения (воздействия), которое расположено с эксцентриситетом относительно шарнира 20, воздействует на дистанцирующий элемент 8 поддерживающего руку элемента 6. Посредством подходящего инструмента, в показанном примере осуществления – отвертки, положение точки 82 воздействия относительно оси поворота шарнира 20 может устанавливаться через элемент геометрического замыкания и таким образом может настраиваться эксцентриситет и приложенное посредством пассивного исполнительного органа 26 усилие может модифицироваться. Альтернативно или дополнительно имеющаяся возможность изображена на фиг.1. Она показывает на обоих изображениях соответственно элемент 18 передачи усилия, а также расположенный на нем дистанцирующий элемент 8. Изображение относительно показанного на фиг.24 изображения повернуто на 90°. Имеются соответственно два пассивных исполнительных органа 26, которые на противолежащих точках 82 воздействия воздействуют на дистанцирующий элемент 8. Если теперь должно настраиваться усилие, то альтернативно или дополнительно к показанному на фиг.24 мероприятию также один или оба из пассивных исполнительных органов 26 может удаляться и заменяться другим. Также вследствие этого настраивается усилие. Если пассивный исполнительный орган 26 должен совместно направляться, чтобы, например, вновь использоваться в более позднее время, то его верхняя крепежная петля может располагаться на выступе 84.
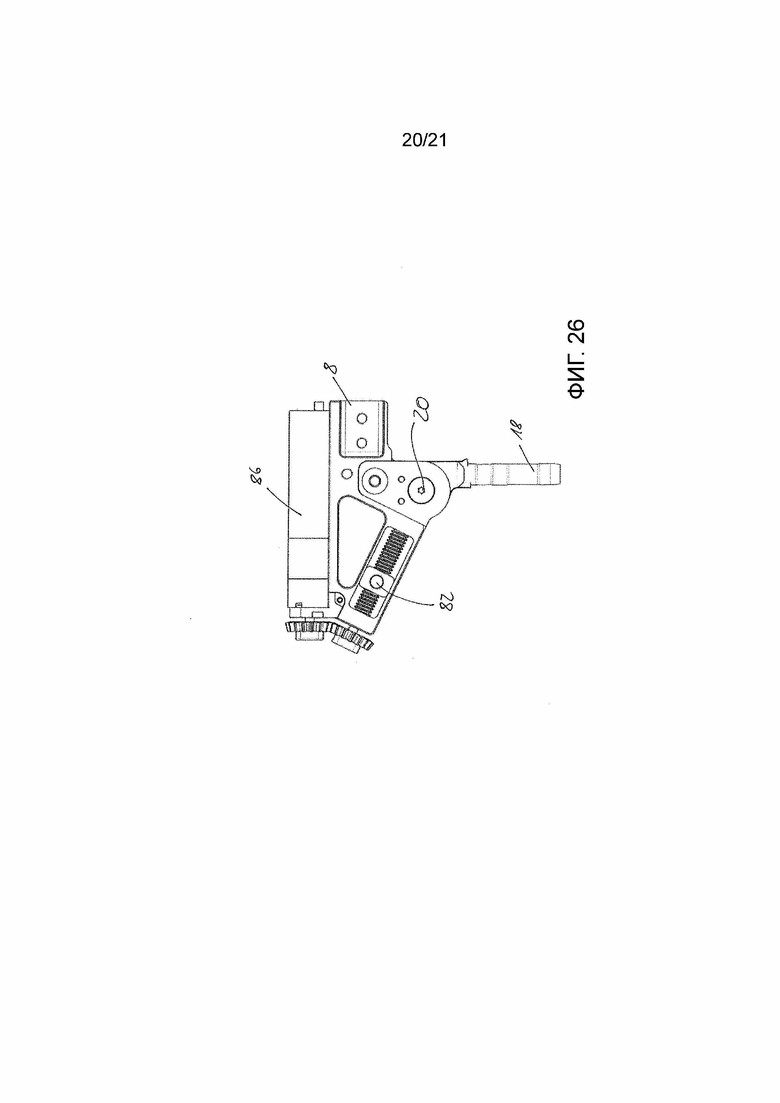
Фиг.26 показывает шарнир 20 с дистанцирующим элементом 8 поддерживающего руку элемента 6 и элемент 18 передачи усилия. Можно видеть, что точка 82 воздействия выполнена с возможностью смещения. Для этого устройство имеет двигатель 86, посредством которого могут приводиться в действие изображенные в левой области фиг.26 зубчатые колеса, вследствие чего перемещается точка 82 воздействия. Посредством двигателя система может приводиться в состояние минимального усилия и таким образом по меньшей мере почти, предпочтительно, полностью деактивироваться, что, в частности, при надевании и снимании устройства является преимуществом или когда поддержка не требуется по иным причинам.
Фиг.27 и 28 соответствуют изображению фиг.18 с разницей в том, что имеются два других натяжных элемента 58, которые расположены не между поддерживающими руку элементами 6, а между соответственно одной из поддерживающих руку элементов 6 и вспомогательным опорным элементом 16. Также посредством них удерживаются на руке оболочковые элементы 10 для руки. Кроме того, элементы для обеих рук являются независимыми друг от друга, так что влияние может предотвращаться. Кроме того, на фиг.28 был удален показанный на фиг.18 натяжной элемент 58.
Список ссылочных позиций
2 пользователь
4 рука
6 поддерживающий руку элемент
8 дистанцирующий элемент
10 оболочковый элемент для руки
12 манжета
14 вспомогательная опора
16 вспомогательный опорный элемент
17 контактный элемент
18 передающий усилие элемент
20 шарнир
22 шаровой шарнир
24 настроечное устройство
26 пассивный исполнительный орган
28 рычажный элемент
30 плечевой ремень
32 соединительный элемент
34 застежка
36 ремень
38 подкладка
40 карман
42 экзоскелет
44 набедренный элемент
46 контактирующий с полом элемент
48 поворотный рычаг
50 двойная стрелка
52 обратный натяжитель
54 замыкающий элемент
56 оболочка
58 натяжной элемент
60 крепежный элемент
62 проушина
64 захватный элемент
66 замок
68 фиксирующий элемент
70 фиксирующий приемный элемент
72 исполнительный элемент
74 стрелка
76 проушина
78 контактный элемент
80 выступ
82 точка воздействия
84 выступ
86 двигатель
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОДДЕРЖИВАНИЯ ПО МЕНЬШЕЙ МЕРЕ ОДНОЙ РУКИ ПОЛЬЗОВАТЕЛЯ | 2018 |
|
RU2762345C2 |
| НОСИМЫЙ МЕХАНИЗМ ДЛЯ ПОДДЕРЖКИ РУК ПОЛЬЗОВАТЕЛЯ | 2021 |
|
RU2809267C1 |
| ПРОТЕЗНОЕ УСТРОЙСТВО | 2016 |
|
RU2735674C2 |
| Устройство для компенсации прикладываемой к экзоскелетам нагрузки | 2020 |
|
RU2813174C2 |
| Пассивный реабилитационный экзоскелет | 2017 |
|
RU2665386C1 |
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |
| ЭКЗОСКЕЛЕТ И СПОСОБ ЕГО ИСПОЛЬЗОВАНИЯ | 2015 |
|
RU2696631C2 |
| СИСТЕМА ПОМОЩИ ОПЕРАТОРУ В ПРИЛОЖЕНИИ УСИЛИЙ | 2018 |
|
RU2747404C1 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| АКТИВНЫЙ МОДУЛЬ СПИНЫ ЭКЗОСКЕЛЕТА | 2023 |
|
RU2825044C1 |




Изобретение относится к медицине, а именно к устройствам для поддержания двух рук пользователя. Устройство имеет два поддерживающих руку элемента, по меньшей мере один пассивный исполнительный орган и по меньшей мере одну вспомогательную опору для подлежащего приложению усилия. Поддерживающие руку элементы каждый выполнен с одним оболочковым элементом для руки для надевания на соответствующую руку. Пассивный исполнительный орган выполнен для приложения усилия к по меньшей мере одному из поддерживающих руку элементов. Вспомогательная опора имеет по меньшей мере один вспомогательный опорный элемент в форме набедренного ремня и по меньшей мере два элемента передачи усилия, которые выполнены для передачи противодействующего усилия от соответствующего поддерживающего руку элемента на вспомогательный опорный элемент. Элементы передачи усилия расположены каждый на вспомогательном опорном элементе с возможностью по меньшей мере поворота относительно этого вспомогательного опорного элемента вокруг по меньшей мере одной оси вращения. Устройство в надетом состоянии позволяет циркумдукцию руки. Достигается возможность воспроизведения движений, которые осуществляются в том числе за счет движений туловища, позвоночника или плечевого пояса, что обеспечивает повышение безопасности пользователя при использовании устройства. 13 з.п. ф-лы, 28 ил.
1. Устройство для поддержания двух рук (4) пользователя (2), причем устройство имеет
– два поддерживающих руку элемента (6), каждый с одним оболочковым элементом (10) для руки для надевания на соответствующую руку (4),
– по меньшей мере один пассивный исполнительный орган (26), который выполнен для приложения усилия к по меньшей мере одному из поддерживающих руку элементов (6), и
– по меньшей мере одну вспомогательную опору (14) для подлежащего приложению усилия, которая имеет по меньшей мере один вспомогательный опорный элемент (16) в форме набедренного ремня и по меньшей мере два элемента (18) передачи усилия, которые выполнены для передачи противодействующего усилия от соответствующего одного из поддерживающих руку элементов на вспомогательный опорный элемент (16),
отличающееся тем, что элементы (18) передачи усилия расположены каждый на вспомогательном опорном элементе (16) с возможностью по меньшей мере поворота относительно этого вспомогательного опорного элемента (16) вокруг по меньшей мере одной оси вращения,
причем устройство в надетом состоянии позволяет циркумдукцию руки.
2. Устройство по п.1, отличающееся тем, что элемент (18) передачи усилия является элементом передачи усилия сжатия, в частности, штангой или направляющей, на котором с возможностью поворота вокруг оси поворота расположен поддерживающий руку элемент (6).
3. Устройство по п.1 или 2, отличающееся тем, что между поддерживающими руку элементами (6) находится по меньшей мере один натяжной элемент (58), в частности, по меньшей мере одна натяжная пружина.
4. Устройство по одному из предшествующих пп., отличающееся тем, что по меньшей мере один из оболочковых элементов (10) для руки имеет замыкающий элемент (54), в частности, ремень, посредством которого оболочковый элемент (10) для руки является замыкаемым вокруг руки.
5. Устройство по п.4, отличающееся тем, что замыкающий элемент (54) посредством по меньшей мере одного крепежного элемента (60) выполнен с возможностью закрепления на другом элементе устройства, чем оболочковый элемент (10) для руки, в частности на плечевом ремне (30) или одном из элементов (18) передачи усилия или на оболочке (56) по меньшей мере одного из элементов (18) передачи усилия или на вспомогательном опорном элементе (16).
6. Устройство по одному из пп.2–5, отличающееся тем, что устройство имеет упор (80), посредством которого ограничивается движение поддерживающего руку элемента (6) относительно элемента передачи усилия сжатия вокруг оси поворота.
7. Устройство по п.6, отличающееся тем, что упор (80) выполнен с возможностью приведения в активное положение, в котором он ограничивает движение, и в пассивное положение, в котором он не ограничивает движение.
8. Устройство по п.7, отличающееся тем, что упор (80) является выступом (80) на элементе передачи усилия сжатия.
9. Устройство по одному из предшествующих пп., отличающееся тем, что пассивный исполнительный орган (26) прикладывает усилие в зависимости от позиции и/или ориентации упомянутого по меньшей мере одного поддерживающего руку элемента (6) относительно вспомогательного опорного элемента (16), в частности в зависимости от угла поворота поддерживающего руку элемента (6) вокруг оси поворота, причем пассивный исполнительный орган (26) прикладывает усилие к поддерживающему руку элементу (6), предпочтительно эксцентрично.
10. Устройство по одному из предшествующих пп., отличающееся тем, что прикладываемое пассивным исполнительным органом (26) усилие имеет возможность изменения посредством изменяемого предварительного натяжения пассивного исполнительного органа (26) и/или посредством настраиваемого эксцентриситета приложения усилия к поддерживающему руку элементу (6).
11. Устройство по одному из предшествующих пп., отличающееся тем, что вспомогательный опорный элемент (16) имеет замыкаемый посредством замка (66) ремень, который выполнен с возможностью обвивания вокруг туловища носителя, причем замок (60) выполнен таким образом, что необходимы по меньшей мере два шага для открытия и закрытия замка (60).
12. Устройство по п.11, отличающееся тем, что один конец ремня должен направляться через проушину (76) и затем должно производиться геометрическое замыкание двух ответно выполненных элементов геометрического замыкания, чтобы закрыть замок (66), и геометрическое замыкание должно размыкаться и упомянутый конец ремня должен направляться через проушину (76), чтобы открыть замок (66).
13. Устройство по одному из предшествующих пп., отличающееся тем, что пассивный исполнительный орган (26) имеет по меньшей мере один упругий элемент, а устройство имеет по меньшей мере один контактный элемент (78), который под предопределенным углом между поддерживающим руку элементом (6) и элементом (18) передачи усилия прилегает к упругому элементу и таким образом изменяет прикладываемое к поддерживающему руку элементу (6) усилие.
14. Устройство по п.13, отличающееся тем, что указанный предопределенный угол и/или указанное изменение прикладываемого усилия являются настраиваемыми за счет того, что предпочтительно контактный элемент (78) выполнен с возможностью перемещения относительно поддерживающего руку элемента (6) и/или относительно элемента (18) передачи усилия.
| US 2016339583 A1, 24.11.2016 | |||
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ ДВИГАТЕЛЬНЫХ ФУНКЦИЙ В ВЕРХНЕЙ КОНЕЧНОСТИ | 2005 |
|
RU2325895C2 |
| US 20160081871 A1, 24.03.2016 | |||
| 0 |
|
SU155011A1 | |
| US 20110127390 A1, 02.06.2011 | |||
| US 20110164949 A1, 07.07.2011. | |||

