Область применения
[0001] Изобретение относится к области медицины, и предназначено для использования в составе тренажера для реабилитации больных с параличом конечностей, а также бытового либо спортивного тренажера для увеличения точности управления и силы мышц. Устройство предназначено для кинестетического воздействия на реабилитируемую конечность, в том числе ее перемещения и вызова проприоцептивных ощущений, и отличается высокой мобильностью, компактностью, возможностью индивидуализированной настройки и оригинальной кинематической схемой. Конструкция также позволяет использование управляемого экзоскелета для увеличения числа и сложности выполняемых движений.
[0002] Вялые параличи (плегии, парезы) являются распространенными при многих заболеваниях, в первую очередь - инсультах и травмах ЦНС и спинного мозга. Для восстановления утраченной двигательной функции используют различные методы, такие как ритмическая магнитная стимуляция, транскраниальная магнитная стимуляция, различные виды массажей, лечебную физкультуру, в том числе с применением тренажеров. Использование тренажеров, как правило, подразумевает, что реабилитируемая конечность обладает хотя бы минимальной мышечной активностью. Благодаря развитию робототехники, конструкции тренажеров усовершенствовались, стали дополняться различными датчиками, например тензо- или мио-датчиками, использование которых дает возможность пациенту инициировать работу тренажера путем минимальных физических усилий, производимых реабилитируемой конечностью, также тренажеры стали использовать и для пациентов с полной плегией конечностей, в этом случае инициация движения тренажера производится или по какому-либо алгоритму или под воздействием иных факторов, в частности, инициирующим сигналом может быть сигнал от специального программного обеспечения, анализирующего электроэнцефалографический сигнал. Вне зависимости от используемых технологий, практически все устройства реабилитации подразумевают использование в реабилитационном кабинете, и соответственно конструкция роботизированных тренажеров если и содержит специальные приспособления для перемещения, то только для перемещения в рамках одного кабинета, что сильно усложняет проведение реабилитации на дому у маломобильной категории пациентов, к которой, в силу особенностей протекания заболевания у пациентов при инсульте или травме позвоночника, относится большинство из них. Кроме этого, конструкция большинства роботизированных систем реабилитации предполагает, что пациент должен принять сидячее положение, что делает невозможным проведение реабилитации на этих устройствах лежачих больных.
Уровень техники
[0003] Известен экзоскелет верхних конечностей (см. описание изобретения к патенту Российской Федерации №2629738, МПК А61Н 1/00, МПК А61Н 1/02, опубл. 31.08.2017), содержащий как минимум один внешний каркас для конечности, состоящий из элемента плеча, модулей плеча и предплечья, локтевого шарнира и кисте держателя, снабженный опорно-адаптационным элементом для крепления к жилету или инвалидному креслу, к которому крепится как минимум одна опора для крепления внешнего каркаса.
[0004] В таком устройстве задачей изобретения является использование пружин для увеличения амплитуды движения верхних конечностей. Она решается таким образом, что пациент, находясь первоначально в положении «сидя», выполняет физические упражнения по осям сустава по короткому рычагу и неполной амплитудой движения, затем переходит к выполнению физических упражнений уже по длинному рычагу, увеличивая амплитуду движения.
[0005] Изобретение относится к области медицины, а именно к устройству, предназначенному для увеличения остаточных сил мышц и расширения амплитуды движений верхних конечностей, и может быть использовано как для абилитации и реабилитации больных с вялым параличом (парапарезом) верхних конечностей, так и в качестве спортивного тренажера, а также при проведении работ, сопряженных с выполнением действий, связанных с длительным статическим нахождением верхних конечностей в вынужденном положении, например при работе хирурга, фотографа или кинооператора.
[0006] Недостатками данного устройства являются: невозможность использования людьми с плегией верхних конечностей, так как для использования экзоскелета пользователь должен использовать собственные мышечные усилия; отсутствие автоматизации при реализации процессов восстановления подвижности; неприменимо для проведения реабилитации лежачих больных.
[0007] Известен тренажер для восстановления подвижности пальцев рук (см. патент Российской Федерации №147759, МПК A61F 2/54, A61F 2/72, опубл. 20.11.2014). Полезная модель направлена на обеспечение возможности движения каждым пальцем руки по мысленным командам пациента. Указанный результат достигается тем, что тренажер для восстановления подвижности пальцев рук, содержит экзоскелет кисти руки, приводы перемещения пальцев экзоскелета с блоком их управления при этом он снабжен индивидуальным приводом перемещения каждого из пальцев, снабженных средством привлечения внимания пациента, а вход блока управления приводами пальцев соединен с электроэнцефалографическим шлемом, надеваемом на голову пациента, при этом блок управления содержит последовательно соединенные блок регистрации электроэнцефалограммы, блок анализа электроэнцефалограммы и блок формирования команд на приводы пальцев.
[0008] Недостатком данного устройства являются невозможность его использования для восстановления подвижности всей руки, так как во время реабилитации пациент задействует только пальцы.
[0009] Известно устройство для реабилитации рук (см. патент Российской Федерации №175854, МПК А61Н 1/02 опубл. 21.12.2017). Полезная модель относится к медицине, а именно к физиотерапии, и может быть использована при восстановительных процедурах мышечной активности руки человека.
[0010] Устройство для реабилитации рук, включающее платформу с поддерживающим элементом, базовый рычаг, выполненный разнесенным и соединенным с платформой, два подвижных рычага, соединенных между собой вращательной парой, первый из которых оснащен приводом и соединен с базовым рычагом вращательной парой с возможностью установки соосно оси вращения проксимальных фаланг кисти руки, второй - кинематически связан с базовым рычагом и выполнен с возможностью соединения с фалангами пальцев, отличающееся тем, что платформа выполнена с возможностью установки через поддерживающий элемент на предплечье, базовый рычаг выполнен с возможностью соединения с кистью через поддерживающий элемент, а с платформой - через вращательную пару и оснащен приводом, подвижные рычаги выполнены с возможностью соединения через поддерживающие элементы, при этом первый рычаг - с проксимальными фалангами пальцев, а второй - со средними фалангами пальцев.
[0011] Недостатком данного устройства является невозможность использования для реабилитации всей руки, так как воздействие может быть оказано только на кисть.
[0012] Известно экзоскелетное устройство для реабилитации рук (см. патент Российской Федерации №175852, МПК А61Н 1/02 опубл. 21.12.2017). Полезная модель относится к медицине, а именно к физиотерапии, и может быть использована при восстановительных процедурах мышечной активности руки человек. Полезная модель направлена на расширение функциональных возможностей в части тренировки сгибательных и разгибательных групп мышц рук при их различной пространственной ориентации. Экзоскелетное устройство для реабилитации рук включает два идентичных рычажных механизма, расположенных зеркально, каждый из которых через последовательно соединенные шарниры связан через траверсу со стойкой. Оси первого и второго шарниров ориентированы на центр сустава плеча, третий шарнир соединен со вторым, и, кроме того, с первым выходным звеном рычажного механизма, четвертый шарнир соединен с первым, первое выходное звено рычажного механизма соединено с плечом через поддерживающий элемент и со вторым выходным звеном через шарнир, ось которого соосна оси локтевого сустава, все шарниры оснащены активными приводами. Активные приводы установлены соосно осям шарниров, ось третьего шарнира соосна оси первого выходного звена, а оси первого и второго шарнира расположены в диапазоне углов от 85-95°.
[0013] Недостатками данного устройства являются отсутствие мобильности, за счет громоздкости конструкции, необходимость проведения сложных подготовительных настроек, невозможность проведения реабилитации пациентов в положении сидя и лежа, невозможность проведения реабилитации кисти пациента.
[0014] Известно также устройство для разработки подвижности плечевого сустава (см. патент Российской Федерации №2653811, МПК А61Н 1/00, МПК А61Н 1/02, опубл. 14.05.2018).
[0015] Устройство содержит основание, снабженное роликами для перемещения, сиденье пациента, размещенное на основании, вертикальную стойку, выполненную регулируемой по высоте, электронный блок управления, прикрепленный к основанию, пульт управления, электрически соединенный с электронным блоком управления, первый реверсивный мотор-редуктор, электрически соединенный с соответствующим выходом электронного блока управления, первую и вторую штанги, второй реверсивный мотор-редуктор, электрически соединенный с соответствующим выходом электронного блока управления, первый и второй датчики угла поворота, роторы которых жестко связаны с выходными валами соответственно первого и второго реверсивных мотор-редукторов, а их электрические выходы подключены к соответствующим входам электронного блока управления, два регулятора положения, снабженные каждый угловой шкалой с фиксатором и прикрепленные с разных сторон к сиденью пациента, узел размещения здоровой руки, установленный на одном из регуляторов положения и состоящий из подлокотника с установочным штырем и его фиксатором, узел размещения разрабатываемой руки, образованный третьей штангой, в средней части которой имеется лоток, а на концах данной штанги размещены соответственно локтевой упор и рукоятка, Г-образный рычаг, один конец которого механически связан со вторым мотор-редуктором, а другой его конец соединен с третьей штангой. Один конец первой штанги кинематически связан с выходом первого реверсивного мотор-редуктора, а другой ее конец через шарнир соединен с одним концом второй штанги, на другом конце которой размещен второй реверсивный мотор-редуктор. На другом регуляторе положения установлена вертикальная стойка, на верхнем конце которой размещен первый реверсивный мотор-редуктор. Первая и третья штанги выполнены регулируемыми по длине.
[0016] Недостатками данного устройства являются отсутствие складной конструкции, низкая мобильность, невозможность использования для реабилитации маломобильных и "лежачих" пациентов.
[0017] Известен тренажер с биологической обратной связью для реабилитации суставов кистей и пальцев рук и способ его работы (см. патент Российской Федерации №2720323 ПМК А61В 5/00, опубл. 28.04.2020).
[0018] Устройство состоит из модуля управления, выполненного в виде полого пластикового корпуса, фиксируемого на предплечье пациента, модуля двигателя сгибания/разгибания кисти руки, при этом он оснащен шаговым двигателем для сгибания/разгибания кисти руки, модулем управления с расположенным в модуле управляющим микроконтроллером, контроллером шагового двигателя для сгибания/разгибания кисти и контроллером для управления сервоприводом. На внешней стороне предплечья больной руки пациента фиксируют модуль управления тренажера, пальцы пациента вставляют в пальцы перчатки и фиксируют пальцы перчатки на подложке фиксации пальцев перчатки, ладонь пациента фиксируют на суппорт-фиксаторе кисти руки, на здоровой руке пациента на среднем и указательном пальцах фиксируют датчики для измерения кожно-гальванической реакции пациента.
[0019] Указанное техническое решение относится к области удовлетворения жизненных потребностей человека. Может быть использовано в медицине для реабилитации (восстановления) двигательной активности и амплитуды движений суставов кистей и пальцев рук, нарушенных вследствие перенесенных человеком травм или заболеваний, например, инсульта, и в области спорта, например, для целенаправленного развития тонуса и силы мышц кистей и пальцев рук, например альпинистов, скалолазов.
[0020] Недостатком данного устройства является ограниченность применения - устройство может использоваться только для восстановления подвижности реабилитации пальцев и кисти руки, так как оснащено приводами только для этих сегментов конечности.
[0021] Известно устройство, способствующее реабилитации (см. патент Российской Федерации №2427361 МПК А61Н 1/02, А61Н 3/00, A61F 5/01 опубл. 27.08.2011). Устройство содержит первую раму, расположенную вдоль первой скелетной части, продолжающейся из сустава, вторую раму, расположенную вдоль второй скелетной части, продолжающейся из сустава в направлении, отличающемся от направления первой скелетной части, датчик угла поворота, выполненный с возможностью обнаружения положения по углу поворота между первой рамой и второй рамой, датчик биосигнала на стороне сгибания, выполненный с возможностью обнаружения биосигнала мышцы-сгибателя, датчик биосигнала на стороне разгибания, выполненный с возможностью обнаружения биосигнала мышцы-разгибателя, блок калибровки, выполненный с возможностью определения величины коррекции на стороне сгибания и величины коррекции на стороне разгибания по отдельности, и блок памяти, выполненный с возможностью сохранения индивидуальных величин коррекции биосигналов, разных для отдельных лиц, величины коррекции на стороне сгибания и величины коррекции на стороне разгибания.
[0022] Недостатками данного устройства являются малая мобильность устройства; отсутствие возможности проведения реабилитации в положении лежа; устройство не может использоваться для реабилитации пациентами с плегией.
[0023] Известен роботизированный реабилитационный аппарат и способ (см. описание патента СА 2678425 А1, Канада А61Н 1/00, опубл. 21.08.2008). Изобретение представляет собой интеллектуальный роботизированный реабилитационный аппарат с 8+2 степенями свободы, способный контролировать отдельно положение плеча, локтя, запястье и пальцев и обеспечивающий функцию движения рук, сопровождающуюся движениями туловища и лопатки. Устройство использует следующий комплексный реабилитационный подход: 1) обладает уникальными возможностями для определения специфических для пациента множественных суставных и/или множественных биомеханических степеней свободы и нервно-мышечных изменений; 2) растягивает жесткие суставы в определенных направлениях под интеллектуальным управлением / уменьшает движения в конкретных суставах и уменьшает чрезмерную нагрузку / движения на излом между конкретными суставами, что делается на основе определенного диагноза для индивидуального лечения; 3) пациенты выполняют произвольные движения и некоторые функциональные задачи, чтобы восстановить/улучшить свои двигательные способности, что делается после того, как жесткость суставов ослабляется за счет растяжения; и 4) результат оценивается количественно по каждому суставу, нескольким суставам / степеням свободы и всей руки.
[0024] Указанное изобретение относится к устройствам для диагностики, тренировки, тренировки и оценки конечностей человека, в частности, к роботизированным устройствам, которые позволяют проводить реабилитацию, включая точную диагностику во всем рабочем пространстве конечностей, растяжение конечности под интеллектуальным контролем, обучение движению конечностей с помощью произвольных упражнений и выполнение оценки результатов.
[0025] Данное устройство позволяет проводить растяжение мышц и суставов реабилитируемой конечности. Для этого устройство снабжено механизмом дозирования нагрузки на каждый из суставов руки, дополнительно, в силу специфики применения, устройство снабжено механизмами, позволяющими подстроить изменяемые параметры тренажера под анатомические особенности человека, тем самым максимально обезопасив пациента от травмоопасных воздействий.
Устройство содержит:
- опору для конечности, при этом указанная опора для конечности фиксирует конечность таким образом, что указанная конечность может вращаться в суставе / степени свободы;
- двигатель, имеющий вал двигателя, указанный вал двигателя, вращающийся с переменной скоростью и установленный на указанной опоре конечности, указанное соединение может вращаться относительно указанного вала двигателя, указанное соединение совмещено с указанным валом двигателя;
- датчик крутящего момента, причем упомянутый датчик крутящего момента расположен между упомянутым двигателем и упомянутой опорой конечности, упомянутый датчик крутящего момента измеряет величину крутящего момента сопротивления, прилагаемого упомянутым соединением; и контроллер, соединенный с указанным датчиком крутящего момента и с указанным двигателем, двигатель адаптирован для уменьшения указанной скорости, сообщаемой контроллером, в ответ на увеличение крутящего момента сопротивления, сообщаемого указанному контроллеру от указанного датчика крутящего момента.
[0026] Данное устройство является наиболее близким аналогом к предлагаемому изобретению по наибольшему количеству сходных признаков, технической сущности, инженерному решению и достигаемому медико-техническому результату как для устройства в целом, так и для его части, а также для способа применения устройства.
[0027] Недостатками данного устройства являются большие габариты, и как следствие - низкая мобильность, затрудняющая применение в домашних условиях, необходимость долгой подготовки устройства к использованию, невозможность использовать для реабилитации в положении лежа.
[0028] Представленное в настоящей заявке роботизированное устройство лишено указанных недостатков.
Краткое описание изобретения
[0029] В приведенном ниже описании реализации изобретения приведены многочисленные детали реализации, призванные обеспечить отчетливое понимание настоящего изобретения. Однако квалифицированному в предметной области специалисту очевидно, каким образом можно использовать настоящее изобретение, как с данными деталями реализации, так и без них. В других случаях хорошо известные методы, процедуры и компоненты не были описаны подробно, чтобы не затруднять излишне понимание особенностей настоящего изобретения.
Кроме того, из приведенного изложения ясно, что изобретение не ограничивается приведенной реализацией. Многочисленные возможные модификации, изменения, вариации и замены, сохраняющие суть и форму настоящего изобретения, очевидны для квалифицированных в предметной области специалистов.
Предлагаемое изобретение - роботизированное устройство для использования в системах для моторной реабилитации направлено на решение технической проблемы, связанной с созданием аппаратных средств моторной реабилитации, отвечающих условиям мобильности, компактности, безопасности, предоставляющим возможность проводить реабилитацию пациентов находящихся в положении лежа или сидя, в условиях стационара или на дому, с полностью обездвиженной конечностью или с конечностью с ограниченными возможностями движения, выполнять движения реабилитируемой конечности в нескольких плоскостях и близкими к естественным, обеспечить индивидуальные настройки для каждого пациента, позволяющие максимально эффективную персонализированную реабилитацию.
[0030] Устройство может быть использовано для реабилитации как верхних, так и нижних конечностей. Однако в дальнейшем тексте описания для его большей ясности работа устройства раскрыта на примере реабилитации верхней конечности (руки), и соответственно вместо терминов формулы "средний сегмент конечности" и "крайний сегмент конечности" используются термины "предплечье" и "кисть".
Задачей изобретения явилось создание конструкции, позволяющей обеспечить:
- мобильность и компактность, за счет наличия подвижных опор снабженных колесами, а также складной и трансформируемой конструкции;
- безопасность, за счет наличия ограничителей перемещения и системы аварийной остановки;
- устойчивость, за счет наличия регулируемых опор и колес со стопорами;
- удобство использования для пациента, за счет регулируемой конфигурации устройства и опор, позволяющих установить устройство в устойчивое положение независимо от конфигурации мебели, на которой находится пациент и индивидуальных ограничений пациента;
- простоту и надежность конструкции, позволяющей при этом за счет оригинальной кинематической схемы с использованием трех простых приводов, в которой сложные движения в плечевом и локтевом суставах достигаются только за счет перемещения устройства размещения конечности по линейной направляющей, реализовать большой спектр и диапазон движений конечности по близким к физиологически естественным траекториям;
- возможность персонализированной реабилитации за счет настроек под индивидуальные особенности пациента: рост и длину конечностей (за счет изменяемой высоты стойки и положения направляющей), безопасный диапазон движения (за счет перемещаемых ограничителей), индивидуальные ограничения (за счет возможности подстройки конфигурации устройства);
- уменьшение времени необходимого для реабилитационной сессии за счет использования элементов и узлов, позволяющих за короткий промежуток времени выполнить индивидуальные настройки тренажера для каждого пациента;
- универсальность использования: изменение конфигурации и положения устройства относительно пациента дает возможность изменения реабилитируемой стороны тела (за счет симметричной конструкции), использования за счет изменяемой высоты пациентами находящимися в разных положениях (сидя, полусидя, лежа и т.п.), с разной степенью парализации;
- возможность проводить реабилитацию как в стационаре, так и на дому у пациента, за счет использования складной мобильной конструкции.
- сокращение площади помещения для проведения реабилитации, за счет компактной конструкции устройства и возможности его хранения в сложенном виде;
- безопасности проведения реабилитации за счет использования системы аварийной остановки и ограничителей, не позволяющих конечности пациента занять травмоопасное положение, даже в случае поломки устройства.
[0031] Технический результат изобретения заключается в создании аппаратного средства для моторной реабилитации отвечающего условиям мобильности, компактности, безопасности, предоставляющим возможность проводить реабилитацию пациентов находящихся в положении лежа или сидя, в условиях стационара или на дому, с полностью обездвиженной конечностью или с конечностью с ограниченными возможностями движения, выполнять перемещение реабилитируемой конечности в нескольких плоскостях и близкими к естественным, обеспечить индивидуальные настройки для каждого пациента позволяющие максимально эффективную персонализированную реабилитацию и увеличении, тем самым, эффективности двигательной (моторной) реабилитации.
[0032] Предлагаемое устройство выполнено складным, компактным и мобильным, предназначенным для легкой транспортировки одним человеком, в том числе в общественном транспорте, и благодаря этому в зависимости от состояния пациента может быть использовано как в стационаре, так и на дому, что позволяет проводить полноценные реабилитационные мероприятия для маломобильных пациентов, несмотря на их ограниченную подвижность.
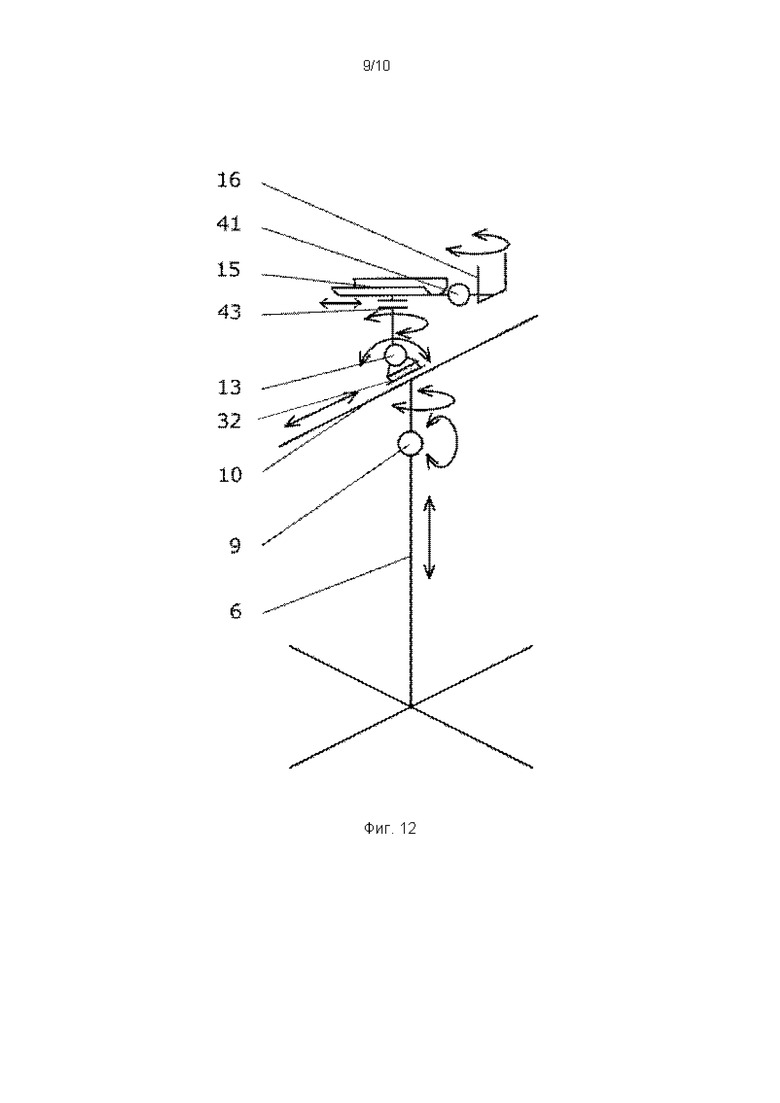
[0033] Устройство использует естественную кинематику человеческого тела для реализации достаточно сложных движений парализованной с высокой степенью подобия произвольным движениям, которые бы выполнялись самостоятельно здоровой конечностью. За счет этого удалось обеспечить также простоту и надежность конструкции и управления ею. Кинематическая схема работы устройства показана на Фиг. 9-13.
[0034] Сценарий применения предлагаемого изобретения предполагает кинестетическое и проприоцептивное воздействие на реабилитируемую конечность, запускаемое по результатам измерения когнитивной или/и мышечной активности пациента или по программе проведения реабилитации с целью предоставления пациенту мультисенсорной обратной связи в ходе выполнения движений во время реабилитационных упражнений и активации таким образом процесса нейропластичности в головном мозге, восстанавливающего нарушенные вследствие заболевания нейронные связи или с целью оказания двигательной помощи, в случае проведения реабилитации пациентов с потерей двигательных функций руки вызванных повреждением спинного мозга или другими причинами.
[0035] Технический результат достигается роботизированным устройством тренажера для реабилитации конечностей, включающим основание с опорами; стойку, прикрепленную к основанию; закрепленную на стойке направляющую; перемещающуюся по направляющей каретку, к которой шарнирно прикреплен узел для размещения конечности; привод, перемещающий каретку и узел для размещения конечности по направляющей; систему и/или датчики определения положения элементов устройства; блок управления работой приводов, соединенный с компьютером с установленным программным обеспечением; устройство аварийной остановки; блок питания; при этом стойка прикреплена к основанию с возможностью изменять наклон и/или поворот относительно основания; направляющая закреплена на стойке с возможностью изменять и фиксировать позицию места крепления направляющей к стойке, а также изменять и фиксировать угол наклона направляющей относительно стойки и/или угол поворота относительно оси стойки; программное обеспечение, установленное на компьютере, выполнено с возможностью обрабатывать сигналы с блока управления и/или с системы определения положения элементов устройства.
[0036] Роботизированное устройство может дополнительно включать управляемый привод положения высоты стойки сдатчиком.
[0037] По крайней мере одна опора основания может быть выполнена с возможностью изменять угловое положение, а также иметь возможность изменять длину. По крайней мере две опоры могут иметь колеса со стопорами.
[0038] Стойка роботизированного устройства может быть выполнена с возможностью фиксации угла наклона к основанию в по крайней мере двух положениях, а также изменения высоты при выполнении упражнения.
[0039] Привод для перемещения каретки может иметь ограничители движения.
[0040] Направляющая роботизированного устройства может быть выполнена прямой или криволинейной.
[0041] Узел для размещения конечности может быть выполнен съемным. Кроме того, устройство может иметь телескопическую ручку для перевозки в сложенном состоянии.
[0042] В качестве узла размещения конечности может быть использован экзоскелет конечности, либо специальный узел, который включает основание с закрепленным на нем ложементом среднего сегмента конечности; шарнирно прикрепленное к основанию ложемента среднего сегмента конечности основание с прикрепленным к нему ложементом крайнего сегмента конечности; привод для приведения основания ложемента крайнего сегмента конечности в движение; систему и/или датчики определения положения элементов узла.
[0043] Привод для приведения основания ложемента крайнего сегмента конечности в движение может иметь ограничители движения.
[0044] Система и/или датчики определения положения элементов могут быть закреплены на соответствующих элементах узла, либо выполнены оптическими и закреплены дистанционно.
[0045] Ложементы могут быть выполнены съемными и регулируемыми.
[0046] Основание ложемента среднего сегмента конечности может быть выполнено с возможностью перемещения вдоль своей продольной оси, ложемент крайнего сегмента конечности может быть выполнен в виде экзоскелета.
[0047] Технический результат достигается способом применения роботизированного устройства тренажера для реабилитации конечностей, в котором осуществляют перемещение реабилитируемой конечности с сохранением естественных угловых степеней свободы верхнего и среднего суставов конечности и естественный объем движений за счет конструкции основания и стойки, позволяющих анатомически естественное положение конечности при движении, осуществляют перемещение среднего и/или крайнего сегмента конечности с сохранением естественных анатомических углов в суставах и траекторий движения сегментов конечности за счет возможности перемещения среднего сегмента конечности вместе с ложементом с как минимум одной степенью свободы вдоль продольной оси ложемента, и сохранения как минимум двух угловых степеней свободы среднего сегмента конечности за счет закрепления основания ложемента среднего сегмента конечности к каретке с помощью шарнира с как минимум двумя угловыми степенями свободы, и приведения каретки в линейное движение с помощью привода, осуществляют перемещение крайнего сустава конечности, обеспечивая естественные угловые степени свободы в суставе и траекторию движения крайнего сегмента за счет размещения конечности в ложементах таким образом, чтобы соединяющий средний и крайний сегменты конечности сустав находился в проекции шарнира, соединяющего основания ложементов среднего и крайнего сегментов конечности, и приведения крайнего сегмента конечности в угловое перемещение и относительно среднего сегмента с помощью привода; при этом управление перемещением элементов устройства за счет работы приводов осуществляется блоком управления работой приводов, соединенным с компьютером с установленным на нем программным обеспечением, получающим от блока управления информацию о положении приводов, и от системы определения положения элементов устройства - информацию о положении элементов, и отправляющим блоку управления команды, управляющие работой приводов.
[0048] Суть предлагаемых решений поясняется нижеследующим описанием и прилагаемыми фигурами.
Краткое описание чертежей
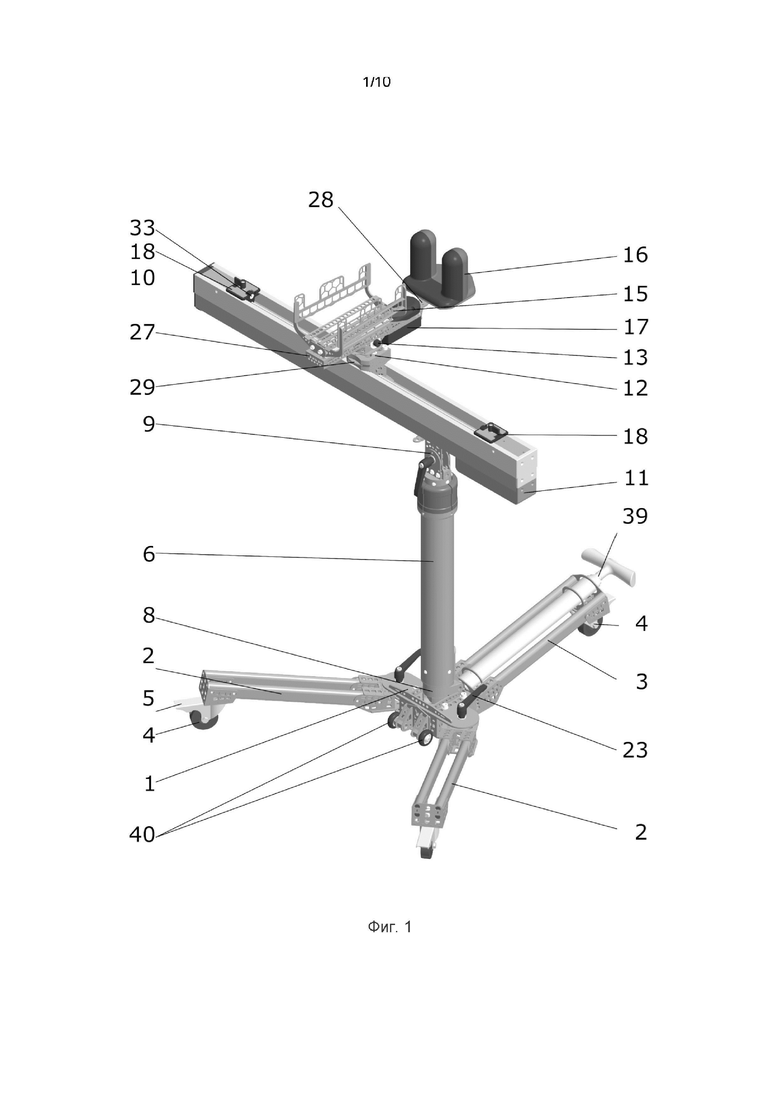
[0049] На фиг. 1 показан общий вид роботизированного устройства для реабилитации конечности.
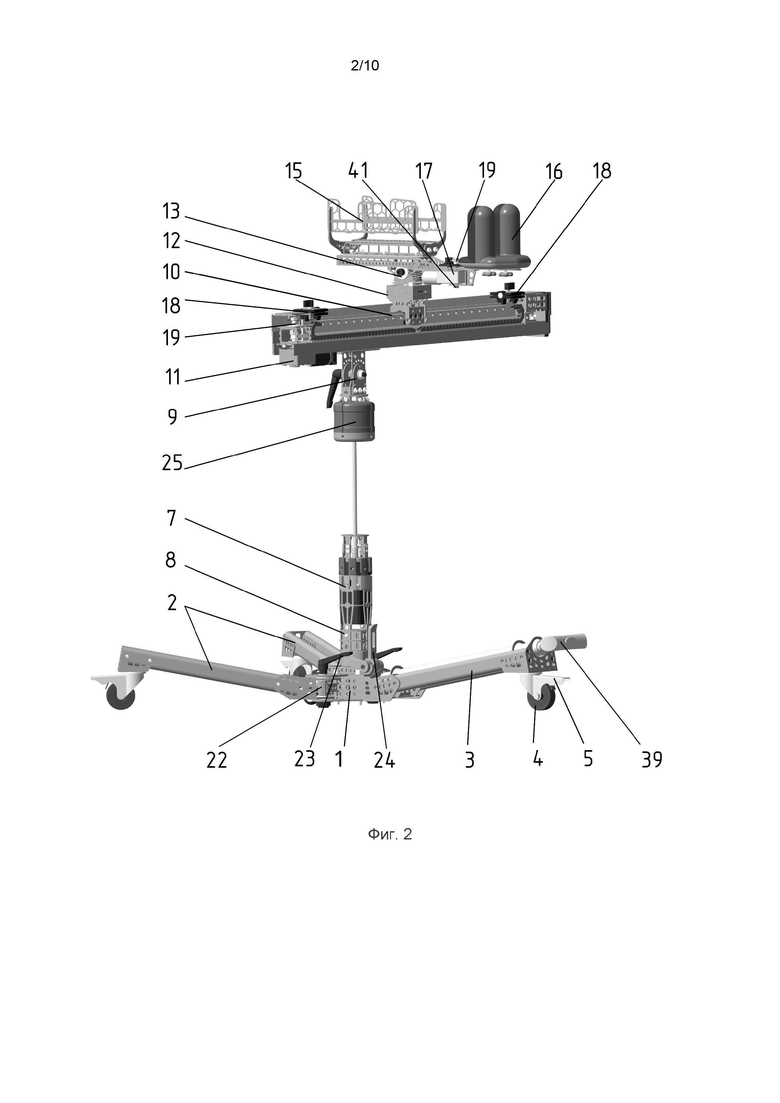
[0050] На фиг. 2 показан вид роботизированного устройства со снятым корпусом стойки и снятой боковой стенкой направляющей.
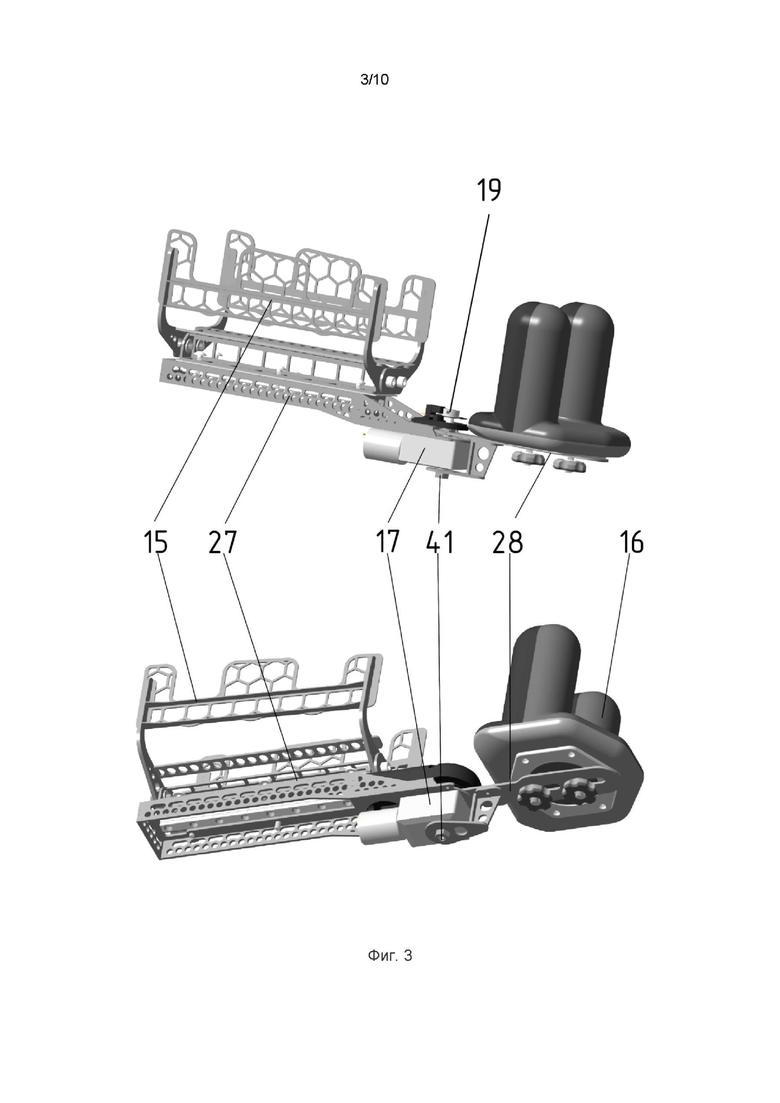
[0051] На фиг. 3 показаны компоненты узла размещения конечности.
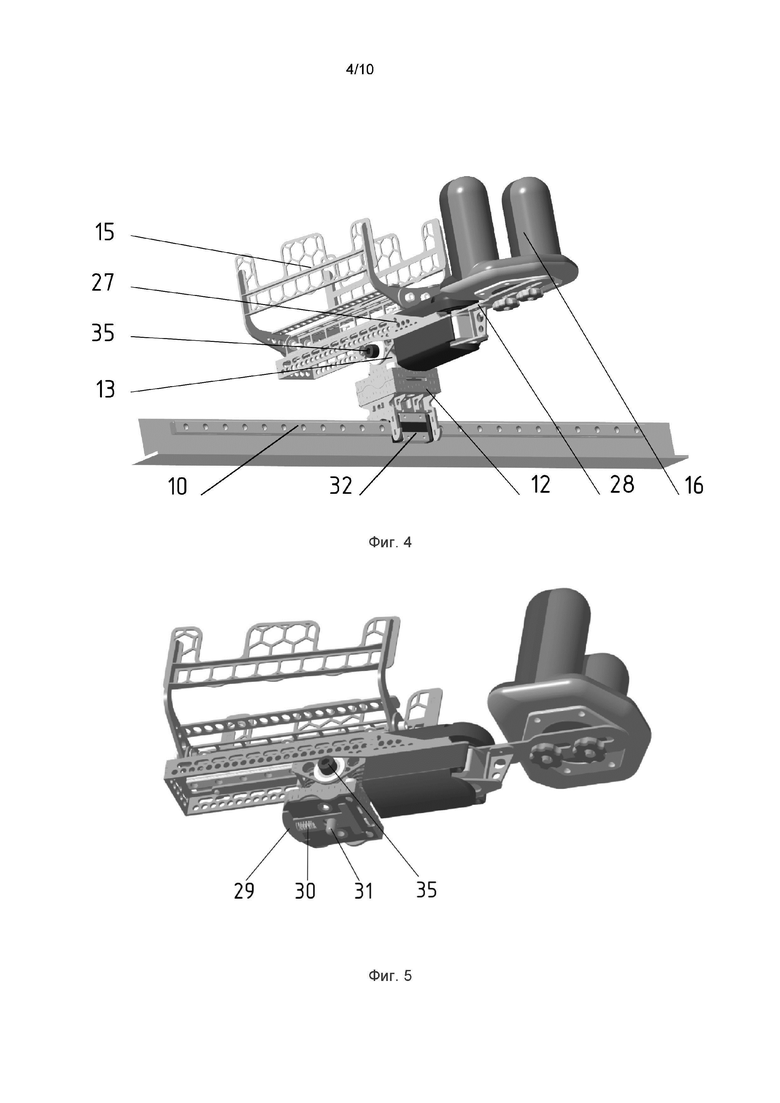
[0052] На фиг. 4 показаны компоненты крепления каретки (12) к направляющей (10).
[0053] На фиг. 5 показаны компоненты крепления узла размещения конечности к каретке (12).
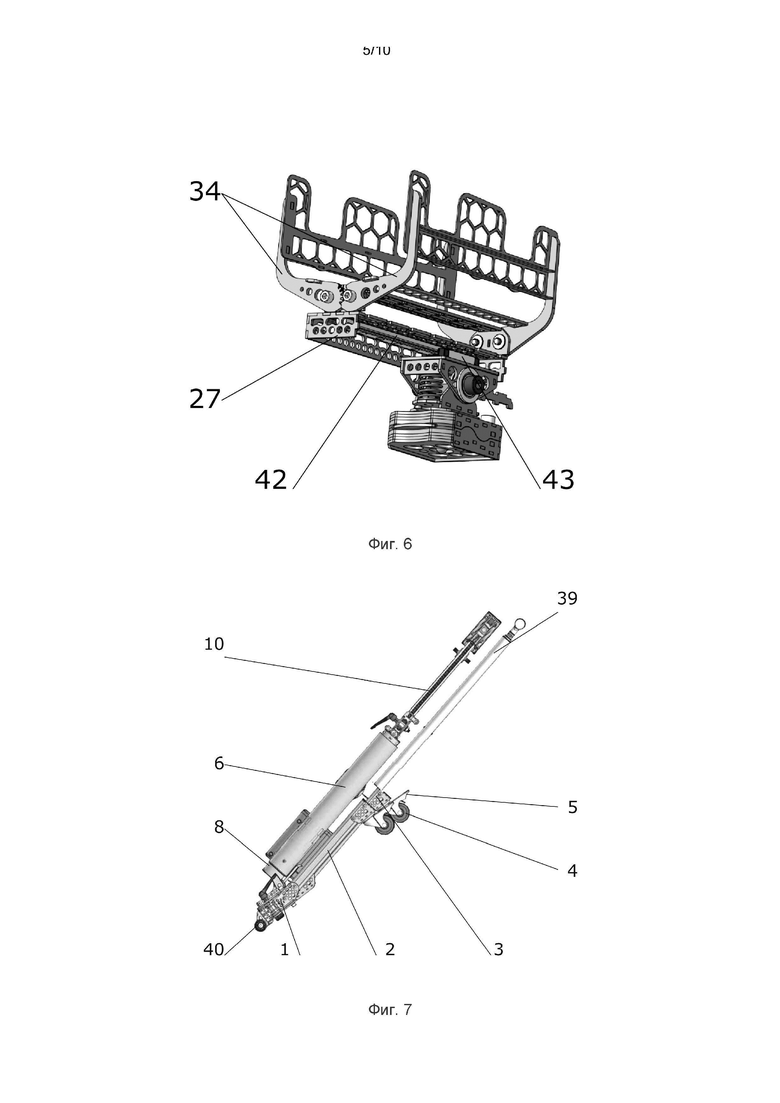
[0054] На фиг. 6 показаны компоненты ложемента предплечья (15).
[0055] На фиг. 7 показано роботизированное устройство в сложенном виде.
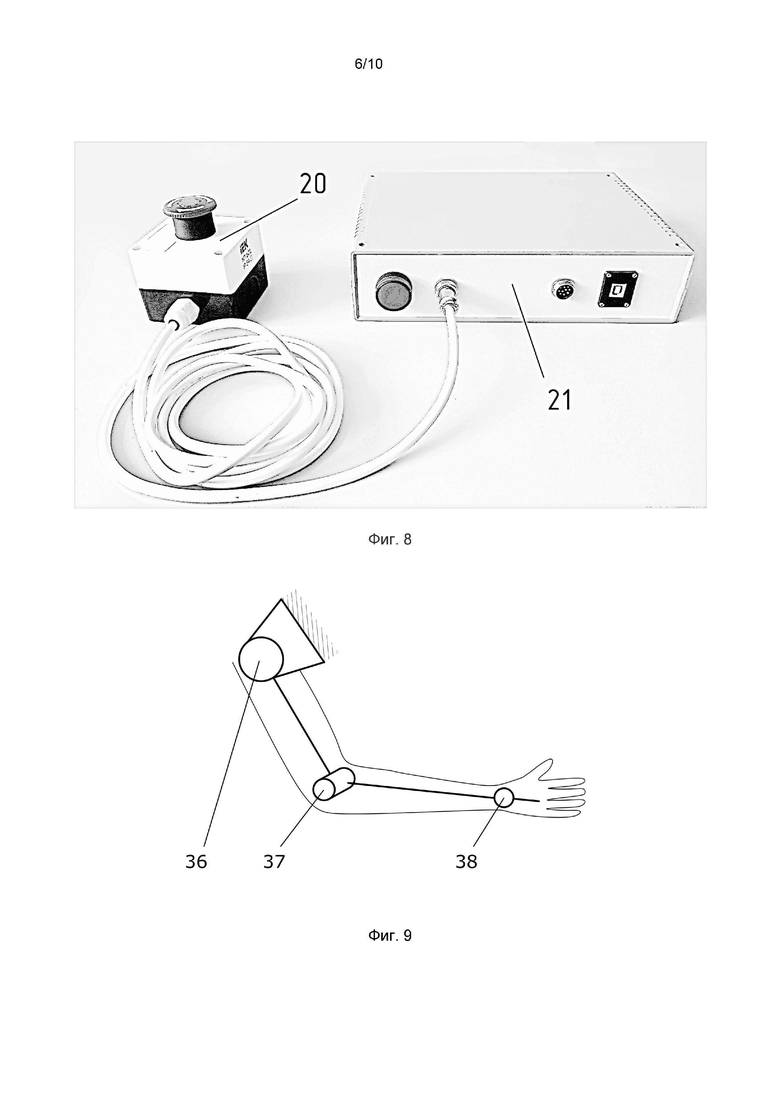
[0056] На фиг. 8 показаны система аварийной остановки и блок управления работой приводов.
[0057] На фиг. 9 показана кинематическая схема руки человека.
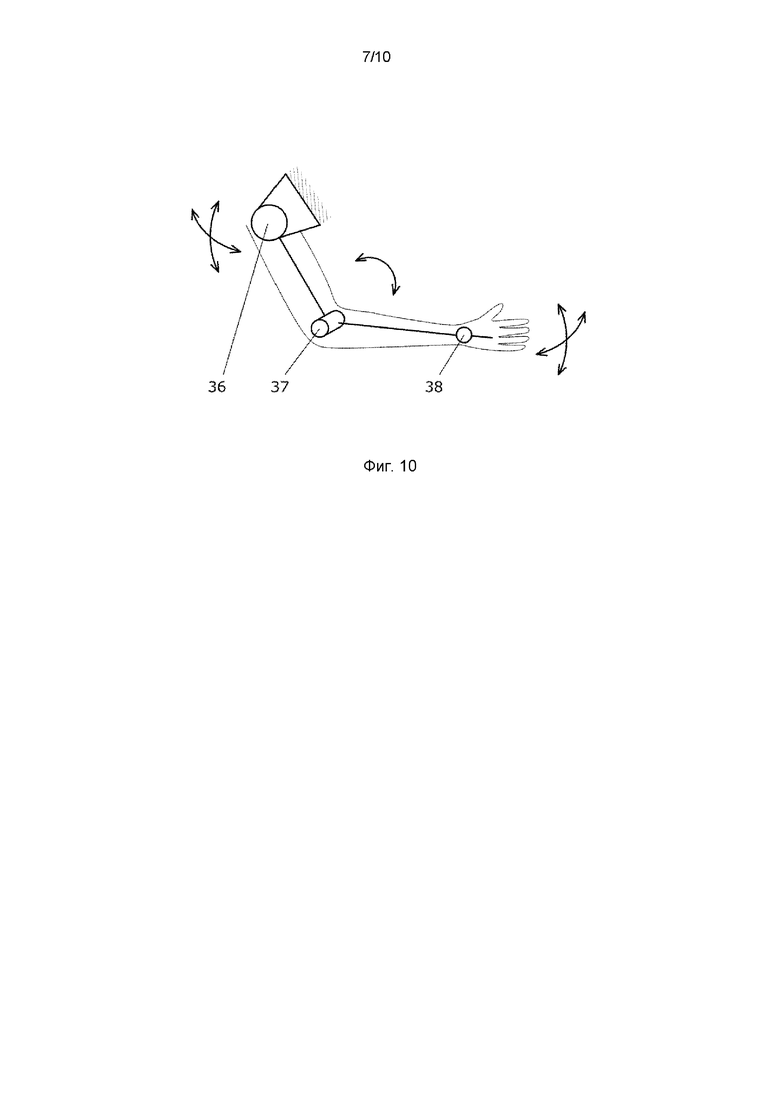
[0058] На фиг. 10 показаны степени свободы суставов руки человека.
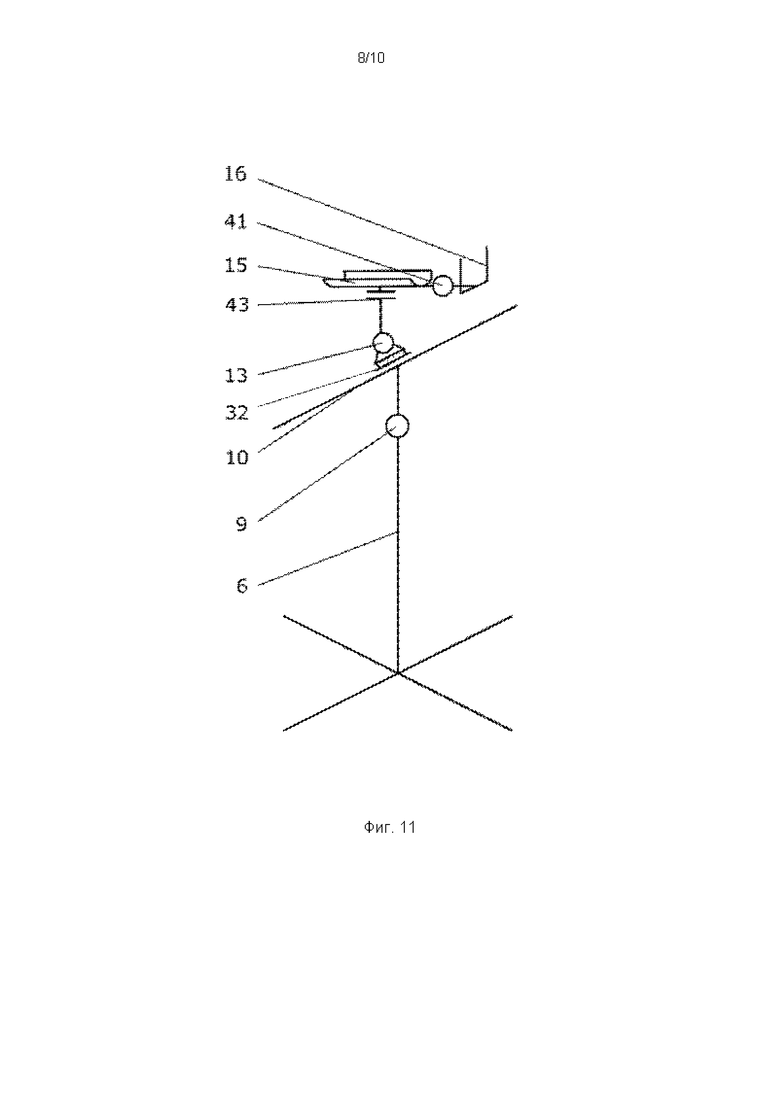
[0059] На фиг. 11 показана кинематическая схема роботизированного устройства.
[0060] На фиг. 12 показаны степени свободы узлов роботизированного устройства.
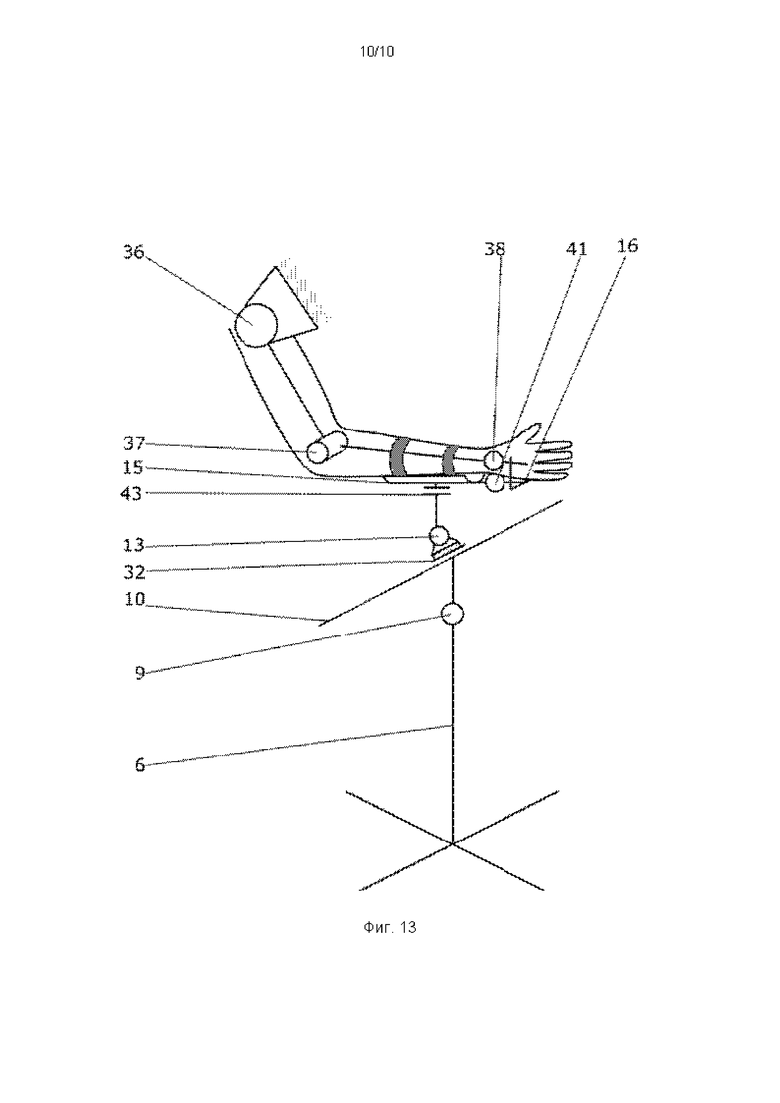
[0061] На фиг. 13 показана кинематическая схема руки пациента и устройства в момент проведения реабилитации.
Подробное описание изобретения
[0062] Устройство, в конструктивном варианте, показанном на Фиг. 1-8 (но не являющемся единственно возможным), содержит:
- основание (1), выполненное с прикрепленными к нему опорами (2,3) с возможностью регулирования длины опор (2, 3) и углового положения подвижных (2) опор; при этом опоры выполнены с колесами (4) со стопорами (5);
- телескопическую ручку (39) прикрепленную к основанию (1), выполненную с возможностью складывания и раскладывания, и предназначенную для перевозки устройства в сложенном (транспортном) состоянии;
- шарнирно закрепленную на основании (1) телескопическую стойку (6), выполненную с возможностью изменения с высоты с помощью привода (7), и изменения угла наклона к основанию с помощью шарнира (8), а также фиксации угла наклона с помощью замка (24) и имеющую узел (25), в котором осуществляется поворот верхней части стойки относительно нижней и их взаимная фиксация;
- расположенный вверху стойки (6) узел закрепления направляющей (9), выполненный в виде шарнира с как минимум одной угловой и одной линейной степенью свободы;
- закрепленную на стойке (1) с помощью узла (9) направляющую (10), выполненную с возможностью изменять положение места крепления к стойке и углов наклона и поворота по отношению к стойке (6) с помощью узла закрепления (9);
- перемещающуюся по направляющей с помощью привода (11) каретку (12), выполненную в виде корпуса соединенного с направляющей через линейный подшипник (32);
- установленный на каретке шарнир (13) закрепления узла размещения конечности, выполненный с возможностью снять узел размещения конечности с каретки (12) освободив стопор (29), и с возможностью обеспечения двух угловых степеней свободы за счет вращения вокруг двух осей (31, 35);
- узел размещения конечности, выполненный в виде соединенных между собой основания ложемента предплечья (27) и основания ложемента кисти (28), с возможностью изменения угла между основаниями с помощью привода (17), а также с возможностью перемещения основания ложемента предплечья (27) вдоль своей продольной оси за счет скольжения направляющей основания ложемента предплечья (42) по линейному подшипнику (43), закрепленному на шарнире (13);
- закрепленные на основании ложемента предплечья (27) и основании ложемента кисти (28) быстросъемные или регулируемые ложементы предплечья (15) и кисти (16), выполненные с возможностью фиксировать предплечье и кисть пациента с помощью ремней (на иллюстрациях не показаны);
- ограничители движения (18), в описываемом конструктивном решении выполненные в виде механических упоров, включающих постоянные магниты (33);
- систему определения положения движущихся элементов (19), которая может быть выполнена в виде системы механических, оптических или электронных датчиков и их контроллеров, или комбинации таких датчиков и контроллеров;
- систему аварийной остановки, в описываемом конструктивном исполнении выполненную в виде кнопки аварийной остановки (20) и размещенных на каретке (12) датчиков Холла (на иллюстрациях не показаны), передающих информацию о приближении к постоянным магнитам (33), расположенным в ограничителях движения (18) в блок управления работой приводов (21);
- блок управления работой приводов (21), выполненный в виде электронного блока, который обрабатывает информацию с системы определения положения движущихся элементов (19), передает ее на компьютер с установленным на нем программным обеспечением реабилитационного тренажера, а также получает от него команды, на основе которых формирует и передает управляющие сигналы на приводы;
- блок питания, в данном конструктивном исполнении выполненный в одном корпусе с блоком управления работой приводов (21).
[0063] Ложемент кисти (16) может быть также выполнен в виде экзоскелета кисти (на иллюстрациях не показан), представляющего собой механическую конструкцию охватывающую кисть в целом и каждый палец в отдельности, с возможностью производить сгибание и разгибание как отдельно каждого пальца, так и кисти в целом, с помощью управляемого привода или приводов.
[0064] Устройство работает следующим образом.
[0065] В положении для транспортировки и хранения стойка (6) с помощью шарнира (8) наклоняется в положение, параллельное неподвижной опоре (3) и фиксируется замком (24). Подвижные опоры (2), которые могут изменять свое угловое положение за счет вращения вокруг осей (22), приводятся в положение параллельное неподвижной опоре (3) и закрепляются фиксаторами (23). Направляющая (10) с помощью узла (9) приводится в положение, параллельное стойке (6). Узел размещения конечности снимается с каретки (12) за счет освобождения стопора (29), или приводится в положение, параллельное стойке (6). Стойка (6), опоры (2,3), направляющая (10) и узел закрепления конечности (если он не был снят) фиксируются вместе ремнем (на иллюстрациях не показан). Телескопическая ручка (39) приводится в транспортное (раздвинутое положение). Далее устройство транспортируется за ручку (39) с помощью транспортировочных роликов (40), расположенных в нижней части основания (1). При хранении устройства ручка (39) складывается.
[0066] Для приведения устройства из транспортного в рабочее положение производят складывание телескопической ручки (39), снятие фиксирующего ремня и раскладывание подвижных опор (2), которые могут изменять свое угловое положение за счет вращения вокруг осей (22) и длину (на иллюстрациях не показано). Затем приводят в рабочее положение стойку (6) за счет изменение ее угла наклона по отношению к основанию (1) в шарнире (8), и фиксацию с помощью замка (24). За счет регулировки положения и длины опор (2,3), а также наклона стойки (6) подбирают оптимальную конфигурацию устройства исходя из положения устройства относительно пациента и из конфигурации мебели (кресла, кушетки, медицинской кровати и т.д.), на которой располагается пациент. Закрепление опор в выбранном положении происходит с помощью фиксаторов (23) и стопоров колес (5).
[0067] С целью настройки оптимального для выполняемого упражнения положения узла размещения конечности относительно пациента, учитывающего его анатомические особенности, с помощью привода (7) изменяют высоту стойки (6), и с помощью узла (9) изменяют угол наклона направляющей (10) к стойке. При этом поворот направляющей (10) относительно оси стойки при настройке осуществляют за счет поворота друг относительно друга верхней и нижней частей стойки в узле (25). Таким образом, направляющая может занять вертикальное, горизонтальное, наклонное положение, и быть направлена параллельно, перпендикулярно или под любым другим углом к фронтальной плоскости пациента, за счет чего обеспечивается перемещение конечности по различным траекториям, анатомически подобным естественным траекториям движения.
[0068] При выполнении упражнения каретка (12) с помощью привода (11) перемещается по направляющей за счет линейного подшипника (32) связывающего направляющую (10) и каретку (12). При этом узел размещения конечности с закрепленной в нем конечностью перемещается вдоль направляющей вместе с кареткой (12). За счет того, что узел размещения конечности крепится к каретке с помощью шарнира (13), обеспечивающего две угловые степени свободы, а ложемент предплечья (15) имеет возможность продольного перемещения вдоль оси основания ложемента предплечья (27), при движении обеспечивается естественное анатомическое положение конечности.
[0069] Узел закрепления конечности крепится к шарниру (13) основанием ложемента предплечья (27), на котором закреплен ложемент предплечья (15), а основание ложемента кисти (28) с закрепленным на нем ложементом кисти (16) закреплено на валу (41) привода (17), крепящегося к основанию ложемента предплечья (27), образуя таким образом шарнир (41), соединяющий основания ложементов. Сгибание запястья во время выполнения упражнения обеспечивается за счет углового перемещения ложемента кисти (16) относительно ложемента предплечья (15) с помощью привода (17). В варианте исполнения устройства, когда ложемент кисти выполнен в виде экзоскелета кисти (на иллюстрациях не показан), за счет работы приводов экзоскелета кисти выполняется также сгибание и разгибание пальцев во время выполнения упражнения.
[0070] Для обеспечения соответствия анатомическим размерам конечности пациента ложемент предплечья (15) может быть выполнен быстросъемным (на иллюстрации не показан) или регулируемым по ширине (как показано на Фиг. 11). Регулируемый по ширине ложемент охватывает предплечье пациента полу-ложементами (34) анатомической формы, шарнирно прикрепленным к основанию ложемента предплечья (27), после чего полу-ложементы (34) фиксируются ремнями (на иллюстрациях не показаны) для надежного закрепления руки пациента.
[0071] Узел размещения конечности имеет разъемное соединение, реализованное за счет использования оси с поперечной проточкой (31), пружины (30) и фиксатора (29), позволяющее быстро снять узел закрепления конечности с каретки (12) (см. Фиг. 10) для его замены, ремонта или приведения устройства в транспортное положение.
[0072] Во время работы устройства перемещение каретки (12) по направляющей (10) и ложемента кисти (16) относительно ложемента предплечья (15) ограничивается ограничителями (18).
[0073] Система отслеживания положения элементов устройства и узла закрепления конечности, реализованная в описываемом конструктивном исполнении на основе энкодеров (19) передает данные о перемещении элементов в блок управления работой приводов (20), который обрабатывает эту информацию, передает ее в программное обеспечение реабилитационного тренажера, и получая оттуда команды для перемещения элементов, преобразует их в команды включения и выключения приводов (11) и (17), а также команды управления скоростью и направлением их работы.
[0074] При выполнении упражнения рука пациента размещается в ложементе предплечья (15) и ложементе кисти (16) таким образом, чтобы лучезапястный сустав (38) находился в проекции шарнира соединяющего основания кистевого ложемента и ложемента предплечья (41). Сгибание/разгибание запястья осуществляется за счет углового поворота в шарнире (39), при этом естественность движения будет соблюдаться за счет расположения шарнира в проекции лучезапястного сустава (38).
[0075] Описанная конструкция позволяет перемещать руку пациента сохраняя естественность движения последней. Рассмотрим это на примере одного из движений. Пациент находится в положении сидя, роботизированное устройство находится перед пациентом, линейная направляющая (10) расположена горизонтально и установлена на удобной для пациента высоте, предплечье пациента закреплено в ложементе предплечья, а кисть - в ложементе кисти. При перемещении каретки вдоль направляющей (10), рука пациента начнет перемещаться вместе с ней за счет отведения/приведения руки в плечевом суставе (36), при этом подвижность руки в локтевом суставе (37) и подвижность ложемента предплечья в линейном подшипнике (43) позволяют за счет небольшого сгибания/разгибания руки в локтевом суставе (37) и наклона и поворота ложемента предплечья (15), компенсирующего этот изгиб, сохранять естественность положения руки в любой момент движения.
[0076] За счет того, что конструкция устройства предполагает большое количество настроек, в том числе (но не только):
- регулировку углового положения и длины опор;
- регулировку высоты и углового положения стойки;
- регулировку угла наклона и поворота направляющей относительно стойки;
- изменение места соединения направляющей со стойкой;
- диапазон перемещения каретки по направляющей;
- диапазон угловой свободы в вертикальной плоскости в шарнире соединения каретки с узлом размещения конечности;
- степень свободы линейного перемещения ложемента предплечья относительно продольной оси ложемента;
- диапазон углового перемещения ложемента кисти относительно ложемента предплечья,
и устройство может располагаться в разных позициях относительно пациента за счет варьирования углового положения и длины опор, высоты и угла поворота направляющей относительно стойки, с помощью устройства могут быть выполнены, например (но не только) следующие движения конечностью:
- продольное и поперечное перемещение в горизонтальной, вертикальной плоскостях
- сгибание / разгибание, горизонтальное отведение / приведение, внутренняя / наружная ротация в плечевом суставе;
- сгибание / разгибание в локтевом суставе; сгибание и разгибание в лучезапястном суставе;
- комплексные движения, комбинирующие несколько простых движений и имитирующие бытовые действия – например, открывание двери, поднесение ко рту чашки и глоток из нее, срывание плода с дерева и т.п.
[0077] Таким образом, использование заявленного изобретения решает техническую задачу, связанную с созданием аппаратных средств моторной реабилитации отвечающих условиям мобильности, компактности, безопасности, предоставляющим возможность проводить реабилитацию пациентов находящихся в положении лежа или сидя, в условиях стационара или на дому, с полностью обездвиженной конечностью или с конечностью с ограниченными возможностями движения, выполнять перемещение реабилитируемой конечности в нескольких плоскостях и близкими к естественным и к выполняемым в реальной жизни, обеспечить индивидуальные настройки для каждого пациента, позволяющие максимально эффективную персонализированную реабилитацию.
[0078] В настоящих материалах заявки представлено предпочтительное раскрытие осуществление заявленного технического решения, которое не должно использоваться как ограничивающее иные, частные воплощения его реализации, которые не выходят за рамки испрашиваемого объема правовой охраны и являются очевидными для специалистов в соответствующей области техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| АССИСТИРУЮЩИЙ РОБОТ-ТРЕНАЖЕР ДЛЯ ПОВРЕЖДЕННОЙ КИСТИ | 2020 |
|
RU2744753C1 |
| Тренажер с биологической обратной связью для реабилитации суставов кистей и пальцев рук и способ его работы | 2019 |
|
RU2720323C1 |
| Пассивный реабилитационный экзоскелет | 2017 |
|
RU2665386C1 |
| Комплекс роботизированный медицинский для реабилитации нижних конечностей и механотренажер реабилитационного комплекса для нижних конечностей | 2022 |
|
RU2820327C1 |
| СПОСОБ КОМПЛЕКСНОЙ РЕАБИЛИТАЦИИ ДВИГАТЕЛЬНОЙ ФУНКЦИИ ВЕРХНЕЙ КОНЕЧНОСТИ У БОЛЬНЫХ ДЕТСКИМ ЦЕРЕБРАЛЬНЫМ ПАРАЛИЧОМ | 2020 |
|
RU2741221C1 |
| Устройство управления нейрореабилитационным тренажером верхней конечности человека | 2017 |
|
RU2644294C1 |
| СПОСОБ КОМПЛЕКСНОЙ РЕАБИЛИТАЦИИ ДВИГАТЕЛЬНОЙ ФУНКЦИИ ВЕРХНЕЙ КОНЕЧНОСТИ У БОЛЬНЫХ ДЕТСКИМ ЦЕРЕБРАЛЬНЫМ ПАРАЛИЧОМ | 2023 |
|
RU2810440C1 |
| РОБОТИЗИРОВАННЫЙ ТРЕНАЖЕР ДЛЯ ЛЮДЕЙ С НАРУШЕНИЯМИ ФУНКЦИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2604038C1 |
| Система нейрореабилитации и способ нейрореабилитации | 2020 |
|
RU2741215C1 |
| Способ прогнозирования восстановления двигательных функций верхней конечности у больных после инсульта | 2022 |
|
RU2796323C1 |
Группа изобретений относится к медицине, а именно к роботизированным устройствам тренажера для реабилитации конечностей. Устройство включает: основание с опорами; стойку, прикрепленную к основанию; закрепленную на стойке направляющую; перемещающуюся по направляющей каретку; привод, перемещающий каретку и узел для размещения конечности по направляющей; датчики определения положения элементов устройства; блок управления работой приводов, соединенный с компьютером с установленным программным обеспечением; устройство аварийной остановки и блок питания. К каретке шарнирно прикреплен узел для размещения конечности. Стойка прикреплена к основанию с возможностью изменять наклон и/или поворот относительно основания. Направляющая закреплена на стойке с возможностью изменять и фиксировать позицию места крепления направляющей к стойке, а также изменять и фиксировать угол наклона направляющей относительно стойки и/или угол поворота относительно оси стойки. Узел размещения конечности закреплен к каретке шарниром с как минимум двумя угловыми степенями свободы. Основание ложемента крайнего сегмента конечности прикреплено к основанию ложемента среднего сегмента конечности шарниром с как минимум одной степенью свободы. Программное обеспечение, установленное на компьютере, выполнено с возможностью обрабатывать сигналы с блока управления и/или с системы определения положения элементов устройства. Достигается повышение эффективности двигательной реабилитации. 3 н. и 20 з.п. ф-лы, 13 ил.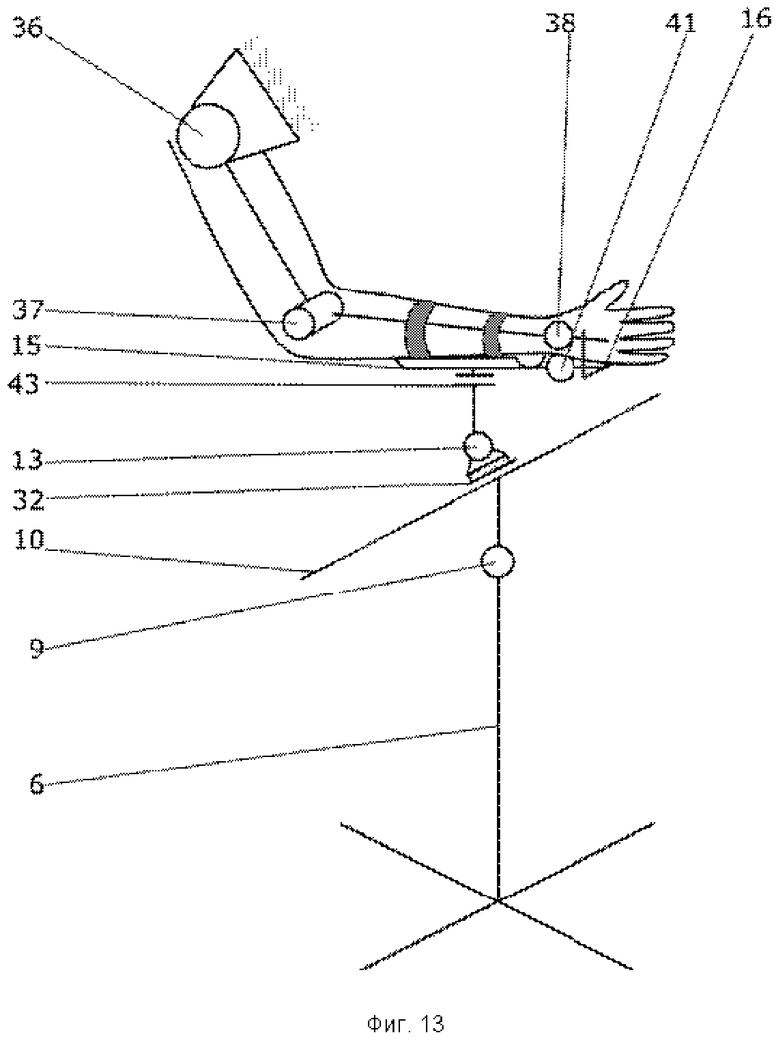
1. Роботизированное устройство тренажера для реабилитации конечностей, включающее: основание с опорами; стойку, прикрепленную к основанию; закрепленную на стойке направляющую; перемещающуюся по направляющей каретку, к которой шарнирно прикреплен узел для размещения конечности, включающий основание ложемента среднего сегмента конечности с закрепленным на нем ложементом среднего сегмента конечности, прикрепленное к основанию ложемента среднего сегмента конечности основание ложемента крайнего сегмента конечности с ложементом крайнего сегмента конечности; привод, перемещающий каретку и узел для размещения конечности по направляющей; систему и/или датчики определения положения элементов устройства; блок управления работой приводов, соединенный с компьютером с установленным программным обеспечением; устройство аварийной остановки; блок питания;
при этом:
- стойка прикреплена к основанию с возможностью изменять наклон и/или поворот относительно основания;
- направляющая закреплена на стойке с возможностью изменять и фиксировать позицию места крепления направляющей к стойке, а также изменять и фиксировать угол наклона направляющей относительно стойки и/или угол поворота относительно оси стойки;
- узел размещения конечности закреплен к каретке шарниром с как минимум двумя угловыми степенями свободы;
- основание ложемента крайнего сегмента конечности прикреплено к основанию ложемента среднего сегмента конечности шарниром с как минимум одной степенью свободы;
- программное обеспечение, установленное на компьютере, выполнено с возможностью обрабатывать сигналы с блока управления и/или с системы определения положения элементов устройства.
2. Роботизированное устройство по п. 1, отличающееся тем, что дополнительно включает управляемый привод для изменения высоты стойки с датчиком положения.
3. Роботизированное устройство по п. 1, отличающееся тем, что по крайней мере одна опора основания выполнена с возможностью изменять угловое положение.
4. Роботизированное устройство по п. 1, отличающееся тем, что по крайней мере одна опора основания выполнена с возможностью изменять длину.
5. Роботизированное устройство по п. 1, отличающееся тем, что по крайней мере две опоры имеют колеса со стопорами.
6. Роботизированное устройство по п. 1, отличающееся тем, что стойка выполнена с возможностью фиксации угла наклона к основанию в по крайней мере двух положениях.
7. Роботизированное устройство по п. 1, отличающееся тем, что стойка выполнена с возможностью изменения высоты при выполнении упражнения.
8. Роботизированное устройство по п. 1, отличающееся тем, что привод для перемещения каретки имеет ограничители движения.
9. Роботизированное устройство по п. 1, отличающееся тем, что направляющая выполнена прямой.
10. Роботизированное устройство по п. 1, отличающееся тем, что направляющая выполнена криволинейной.
11. Роботизированное устройство по п. 1, отличающееся тем, что узел для размещения конечности выполнен съемным.
12. Роботизированное устройство по п. 1, отличающееся тем, что дополнительно имеет телескопическую ручку для перевозки в сложенном состоянии.
13. Роботизированное устройство по п. 1, отличающееся тем, что в качестве узла размещения конечности использован экзоскелет конечности.
14. Роботизированное устройство по п. 1, отличающееся тем, что узел для размещения конечности включает: привод для приведения основания ложемента крайнего сегмента конечности в движение; систему и/или датчики определения положения элементов узла.
15. Узел для размещения конечности на роботизированном устройстве тренажера для реабилитации конечностей, включающий: основание ложемента среднего сегмента конечности с закрепленным на нем ложементом среднего сегмента конечности, прикрепленное к основанию ложемента среднего сегмента конечности основание ложемента крайнего сегмента конечности с ложементом крайнего сегмента конечности; привод для приведения основания ложемента крайнего сегмента конечности в движение; систему и/или датчики определения положения элементов узла, при этом узел размещения конечности закреплен к каретке шарниром с как минимум двумя угловыми степенями свободы, а основание ложемента крайнего сегмента конечности прикреплено к основанию ложемента среднего сегмента конечности шарниром с как минимум одной степенью свободы.
16. Узел по п. 15, в котором привод для приведения основания ложемента крайнего сегмента конечности в движение имеет ограничители движения.
17. Узел по п. 15, в котором система и/или датчики определения положения элементов узла закреплены на соответствующих элементах узла.
18. Узел по п. 15, в котором система и/или датчики определения положения элементов узла выполнены оптическими и закреплены дистанционно.
19. Узел по п. 15, отличающийся тем, что ложементы выполнены съемными.
20. Узел по п. 15, отличающийся тем, что ложементы выполнены регулируемыми.
21. Узел по п. 15, отличающийся тем, что основание ложемента среднего сегмента конечности выполнено с возможностью перемещения вдоль своей продольной оси.
22. Узел по п. 15, отличающийся тем, что ложемент крайнего сегмента конечности выполнен в виде экзоскелета.
23. Способ применения роботизированного устройства тренажера для реабилитации конечностей по п. 1 или 14, в котором:
- осуществляют перемещение реабилитируемой конечности с сохранением естественных угловых степеней свободы верхнего и среднего суставов конечности и естественный объем движений за счет конструкции основания и стойки, позволяющих анатомически естественное положение конечности при движении,
- осуществляют перемещение среднего и/или крайнего сегмента конечности с сохранением естественных анатомических углов в суставах и траекторий движения сегментов конечности за счет возможности перемещения среднего сегмента конечности вместе с ложементом с как минимум одной степенью свободы вдоль продольной оси ложемента, и сохранения как минимум двух угловых степеней свободы среднего сегмента конечности за счет закрепления узла размещения конечности к каретке шарниром с как минимум двумя угловыми степенями свободы, и приведения его в линейное движение с помощью привода,
- осуществляют перемещение крайнего сегмента конечности, обеспечивая естественные угловые степени свободы в суставе и траекторию движения крайнего сегмента за счет размещения конечности в ложементах таким образом, чтобы соединяющий средний и крайний сегменты конечности сустав находился в проекции шарнира, соединяющего основания ложементов среднего и крайнего сегментов конечности, и приведения крайнего сегмента конечности в угловое перемещение относительно среднего сегмента с помощью привода.
| US 2006106326 A1, 18.05.2006 | |||
| Устройство для разработки подвижности плечевого сустава | 2017 |
|
RU2653811C1 |
| US 2003028130 A1, 06.02.2003 | |||
| EP 3056182 A1, 17.08.2016 | |||
| US 2016296405 A1, 13.10.2016 | |||
| US 2018264312 A1, 20.09.2018 | |||
| US 6676570 B2, 13.01.2004 | |||
| TW 201306819 A, 16.02.2013 | |||
| US 9974999 B2, 22.05.2018 | |||
| US 2006211957 A1, 21.09.2006 | |||
| US 9603768 B1, 28.03.2017 | |||
| US 2011251533 A1, 13.10.2011 | |||
| CN | |||

