Изобретение относится к наземным безрельсовым транспортным системам, с возможностью эвакуации аварийных колесных транспортных средств.
До настоящего времени проблему эвакуации аварийной колесной или гусеничной машины решают «традиционно» одним из трех способов:
- буксируют другим транспортным средством (ТС) с помощью гибкой или жесткой буксирной связи (сцепного устройства), что требует относительно мощной силовой установки ТС и высоких сцепных качеств его движителя, не говоря уже о наличии такого ТС в конкретной ситуации или экономической или иной неэффективности его доставки к аварийной машине;
- доставляют своим ходом эвакуатор, грузят аварийную машину на него, фиксируют и транспортируют «на себе», что характеризуется практически теми же недостатками;
- доставляют на ТС ремонтную бригаду с необходимыми запчастями, оборудованием и инструментом, ремонтируют машину на достаточном уровне до возможности ее самостоятельного перемещения до полноценной ремонтной службы, что далеко не всегда возможно по тактическим соображениям плюс также затратно.
Однако недавно, с существенным техническим прогрессом в области электроприводов с использованием мотор-колес, получили развитие способы эвакуации машин своим ходом с предварительной «пересадкой» на них исправного тягового устройства, временно заменяющего аварийное собственное тяговое устройство машины.
Этому способствовали и такие технические предложения, как [1. Набор для превращения любого автомобиля в гибридный. - URL: https://habr.com/ru/post/148622/27.07.2012], которые, однако, не затрагивают проблему эвакуации наземных транспортных средств.
Весьма близким заявляемому устройству аналогом по совокупности существенных конструктивных признаков и функциональным особенностям является наземный транспортный комплекс, содержащий автомобиль с несущей конструкцией, четырьмя съемными колесами и салоном с установленными в нем сиденьями, а также одноместный скутер (моноцикл) с рамой, осью для установки одного колеса, временно снимаемого с упомянутого автомобиля, и закрепленной на раме Т-образной стойкой для опоры рук пользователя («рулем»), с возможностью размещения в пассивном транспортном своем бесколесном состоянии в автомобиле [2. US 9,211,932 В1, МПК (2006.01) B60R 9/10, D62K 13/00, B62K 1/00, B62K 11/00, B62K 17/00, В60В 19/02, 15.12.2015; Ford запатентовал колесо-трансформер. URL: http://autorambler.ru/iournal/events/ford-zapatentoval-koleso-transformer-560993391/?utm_campaign=self_promo&utm_term=head&utm_medium=news&utm_source=rambler&utm_content=autorambler].
В нем скутер в бесколесном пассивном транспортном своем положении размещен в багажном отделении за задним рядом автомобильных сидений, сиденье скутера выполнено в виде седла мотоциклетного типа и установлено, с фиксацией, на раме неповоротно по азимуту, в продольном переднем, то есть ориентированном на Т-образный упор, положении, с возможностью размещения пользователя либо в салоне автомобиля на автомобильном сиденьи, либо вне автомобиля на сиденьи (седле) скутера.
Однако, при всех положительных качествах такого (причем получившего заметный информационный резонанс) транспортного комплекса, следует отметить и такой недостаток, как частичность реализованных технико-эксплуатационных возможностей, прежде всего в части унификации, многофункциональности и компактности комплекса: рама с сиденьем-седлом и «торчащим» Т-образным упором («рулем») большую часть времени эксплуатации комплекса занимает дефицитное место в багажном отделении и создает неудобства компоновочного характера, утяжеляет комплекс, а при использовании скутера по назначению, наоборот, не используется по своему назначению от одного до всех автомобильных сидений в салоне автомобиля; необходимые (рекомендуемые) по условиям и/или требованиям эргономики и безопасности подголовники в верхней части спинки автомобильных сидений также однофункциональны, а их количество соответствует количеству сидений в салоне, недостаточно высок уровень унификации.
Еще более близким к заявляемому способу аналогом по назначению и совокупности существенных признаков (последовательности операций) является способ эвакуации аварийной машины путем ее перемещения в другую географическую точку с использованием устройства эвакуации в составе замещающих колеса машины сменных мотор-колес и автономного источника электропитания (АИЭП) с системой управления, с возможностью создания тягового усилия и поворота для упомянутого перемещения машины [3. RU 2 724 194 С1, B60D 1/00, 22.06.2020].
При этом АИЭП с системой управления размещают однозначно на аварийной машине. Однако поскольку потребные для перемещения аварийной машины, масса которой обычно превышает 1,5 тонн, массогабаритные показатели АИЭП и конструкция машины обусловливают проблематичность дополнительной установки такого вспомогательного эвакооборудования непосредственно на ней, приходится констатировать еще недостаточные тактико-технические (ТТ, для военной техники) и технико-эксплуатационные (ТЭ, для гражданской техники) возможности способа-прототипа. Несмотря на положительный технический результат ее использования.
Далее, хотя разработчиком-патентообладателем такого способа-аналога является Военная академия материально-технического обеспечения, вопрос обеспечения аварийной машины устройством ее эвакуации остается открытым (неясно, откуда у экипажа аварийной машины (или ремонтной группы) берется указанное устройство эвакуации. По умолчанию, его, надо полагать, либо постоянно возят на данной машине (точнее - на каждой машине, поскольку каждая машина - потенциально аварийная), что требует существенных дополнительных объемов и грузоподъемности и экономически накладно, либо привозят как груз на вспомогательном серийном автомобиле (например, УА3-469), что также избыточно затратно.
В источнике информации [3] наряду со способом предложено и устройство для его осуществления (п.2 формулы), включающее средство создания тягового усилия и вспомогательное оборудование, причем, соответственно, в виде мотор-колес и АИЭС с блоком управления плюс электрическую взаимосвязь перечисленных компонентов устройства эвакуации.
Тем не менее, более близким аналогом-устройством для осуществления заявляемого способа по совокупности существенных конструктивных признаков и функциональным особенностям заявитель усматривает устройство («Наземный транспортный комплекс»), представляющее собой электроприводное колесное наземное транспортное средство (ТС) с мотор-колесом, рамой, сиденьем, АИЭП, системой управления и устройством временной взаимосвязи с машиной (в салоне) [4. RU 2721640 С1, B60R 9/10, В60Р 3/06, B62D 63/00, 21.05.2020].
Несмотря на несхожесть назначения (к эвакуации машины отношения не имеет), ТС и машина используют общие сменные мотор-колеса (как правило, одно «моноколесо» с устройством гиростабилизации), с возможностью поочередного перемещения машины и «десантируемого» с нее ТС для более мобильных перемещений пользователя. АИЭП. Комплекс разделен на две части - бортовую часть для перемещения машины и относительно небольшую по массе и габаритам бортовую часть ТС. Устройство взаимосвязи ТС и «материнской» (по отношению к ТС) машины выполнено в виде посадочной части рамы ТС на пол салона машины, плюс крепежа.
В такой транспортной системе временно «отдыхающая» машина без части колес может условно рассматриваться как «аварийная», поскольку в таком состоянии перемещаться не может. В свою очередь, ТС «скутер» на обратном своем пути (возврат к машине) условно можно считать «доставкой мотор-колеса» «аварийной» машине. При этом рама и прочее вспомогательное оборудование в качестве двухфункционального устройства размещают в салоне машины.
Однако такая транспортная система изначально полностью электрифицирована (машина и ТС - электроприводные), а ТС приходится возить на машине постоянно. Такое устройство недостаточно приспособлено для решения задач эвакуации, особенно в военной области.
В то же время, известно типовое устройство как колесных мостов (в том числе ведущего) автомобилей [5. Мосты легковых и грузовых автомобилей: классификация, устройство и назначение. - URL: https://dr1ver.ru/6491-mosty-kolesnyh-mashin.html], так и электромотор-колес (колес со строенными в них электродвигателями, как правило, с редукторной частью на выходе) [6. Мотор-колесо. - URL: https://ru.wikipedia.org/wiki/%D0%9C%D0%BE%D1%82%D0%BE%D1%80-%D0%BA%D0%BE%D0%BB%D0%B5%D1%81%D0%BE]; [7. Конструкция и расчет электромотор-колес / А.И. Яковлев. - М.: Машиностроение, 1978. - URL: https://www.bibliofond.ru/view.aspx?id=520666].
Известен и способ «противоскатывающегося» торможения (остановки, обездвиживания) ведущих колес машины, с соответствующими вариантами устройств для его осуществления - либо стояночного, либо трансмиссионного (центрального) на валу коробки передач, например советского автомобилей ГАЗ-51А, ГАЗ-53А, ЗИЛ-130, Москвич-412 и М-21 «Волга», с ручным приводом [8. Ручной трансмиссионный колодочный тормоз барабанного типа - URL: https://stroy-technics.ru; 9. Устройство тормозов. - URL: https://www.carshistory.ru].
Наиболее близким к заявляемому способу (способом-прототипом) по назначению существенным признакам является способ эвакуации аварийной колесной машины путем ее перемещения с использованием устройства эвакуации в составе замещающих колеса машины сменных электромотор-колес, автономного источника электропитания, системы управления и тормозной системы, с возможностью создания тягового усилия и поворота для упомянутого перемещения машины, предварительно снимая с моста машины, содержащего балку, ступицы и связанные через коробку передач с двигателем главную передачу, межколесный дифференциал и полуоси, ведущие колеса машины и устанавливая на их место на ступицах упомянутые электромотор-колеса, электрически соединяя их с упомянутыми источником энергии и системой управления, запуская в работу систему управления и электрический привод электромотор-колес, и перемещая таким образом аварийную машину в другую географическую точку [10. RU 2739828 С1, МПК B60D 1/00, 28.12.2020].
В способе-прототипе электромотор-колеса устанавливают на аварийную колесную машину вместо ее «родных» ведущих или ведомых колес. При этом реализация способа рассматривается на примере «абстрактных» типовых конструкций легкового автомобиля с колесной формулой 4x2 и элекромотор-колес.
Однако способ-прототип имеет недостаток: при замене ведущих колес аварийной машины (автомобиля), сопровождающейся неподвижным закреплением электромотор-колес «статорными» их частями на ступицах, реактивный момент на электромотор-колесах может превысить суммарный момент сопротивления вращению полуосей со всей трансмиссией и ДВС. В результате тяговый момент (активный) не будет реализован. А установка «статорной» части электромотор-колеса на «неподвижной» балке моста весьма проблематична, тем более в условиях недопустимости вмешательства в конструкцию машины («по умолчанию» - запрет фирмы-производителя машины). Во всяком случае, усложнение конструкции эвакуационного комплекса очевидна.
Задачей (проблемой), на решение которой направлено заявляемое изобретение, является упрощение переоборудования аварийной колесной машины для ее эвакуации способом замены ведущих колес электромотор-колесами, с предотвращением проворота ступиц реактивным моментом электромотор-колес.
Технический результат в соответствии с поставленной задачей (проблемой) достигается за счет того, что в способе эвакуации аварийной колесной машины путем ее перемещения с использованием устройства эвакуации в составе замещающих колеса машины сменных электромотор-колес, автономного источника электропитания, системы управления и тормозной системы, с возможностью создания тягового усилия и поворота для упомянутого перемещения машины, предварительно снимая с моста машины, содержащего балку, ступицы и связанные через коробку передач с двигателем главную передачу, межколесный дифференциал и полуоси, ведущие колеса машины и устанавливая на их место на ступицах упомянутые электромотор-колеса, электрически соединяя их с упомянутыми источником энергии и системой управления, запуская в работу систему управления и электрический привод электромотор-колес, и перемещая таким образом аварийную машину в другую географическую точку, согласно заявляемому изобретению, перед запуском электромотор-колес в работу затормаживают детали, связанные с полуосями со ступицами, за счет штатных средств аварийной машины - в общем случае двигателя, трансмиссии, тормозной системы и системы управления, обеспечивая тем самым их неподвижность относительно балки моста.
Технический результат достигается также за счет дополнительных существенных признаков (при сформулированной выше основной совокупности существенных признаков) способа:
- детали, связанные с полуосями со ступицами, могут затормаживать включением низшей передачи в коробке передач (это - частный случай средства исключения прокрутки статорных частей электромотор-колес);
- детали, связанные с полуосями со ступицами, могут затормаживать включением центрального (трансмиссионного, стояночного) тормоза, предусмотренного в трансмиссии (это - другой частный случай средства исключения прокрутки статорных частей электромотор-колес);
- детали, связанные с полуосями со ступицами, могут затормаживать включением паркинга, предусмотренного в трансмиссии (это - тоже другой частный случай средства исключения прокрутки статорных частей электромотор-колес);
- детали, связанные с полуосями со ступицами, могут затормаживать включением низшей передачи в коробке передач и упомянутых тормозов, предусмотренных в трансмиссии (это в наибольшей мере дополнительно расширяет возможности способа, позволяя гарантированно обеспечить балкой моста реактивных моментов на статорах электромотор-колес).
Среди массива известных способов и устройств не обнаружены такие, совокупность существенных признаков которых совпадала бы с заявляемыми совокупностями признаков способа. В то же время, именно за счет последних достигается новый технический результат, что обусловливает наличие у заявляемых способа квалификационного признака «мировой уровень новизны».
Совокупность отличительных существенных признаков заявляемого способа не является простой суммой известных технических результатов применения порознь известных последовательности операций или компонентов транспортной системы.
Имеет место «сверхэффект» (в патентоведческом значении этого термина), который не является очевидным для специалиста из достигнутого уровня техники (разумеется, до рассмотрения заявляемого технического решения). С указанным выше спектром новых возможностей. Это убедительно демонстрирует изобретательский уровень разработки как второй из триады квалификационных признаков изобретения.
Третий квалификационный признак, - промышленная применимость, - также неоспорим и вытекает, прежде всего, из того же богатейшего опыта проектирования, производства, эксплуатации и ремонта автотранспортной техники).
Подробнее сущность изобретения раскрывается в приведенном ниже примере реализации (обобщенный случай - с любым возможным и наличным средством торможения (остановки) полуосей со ступицами моста или совокупностью средств, и иллюстрируется (фиг.1, 2):
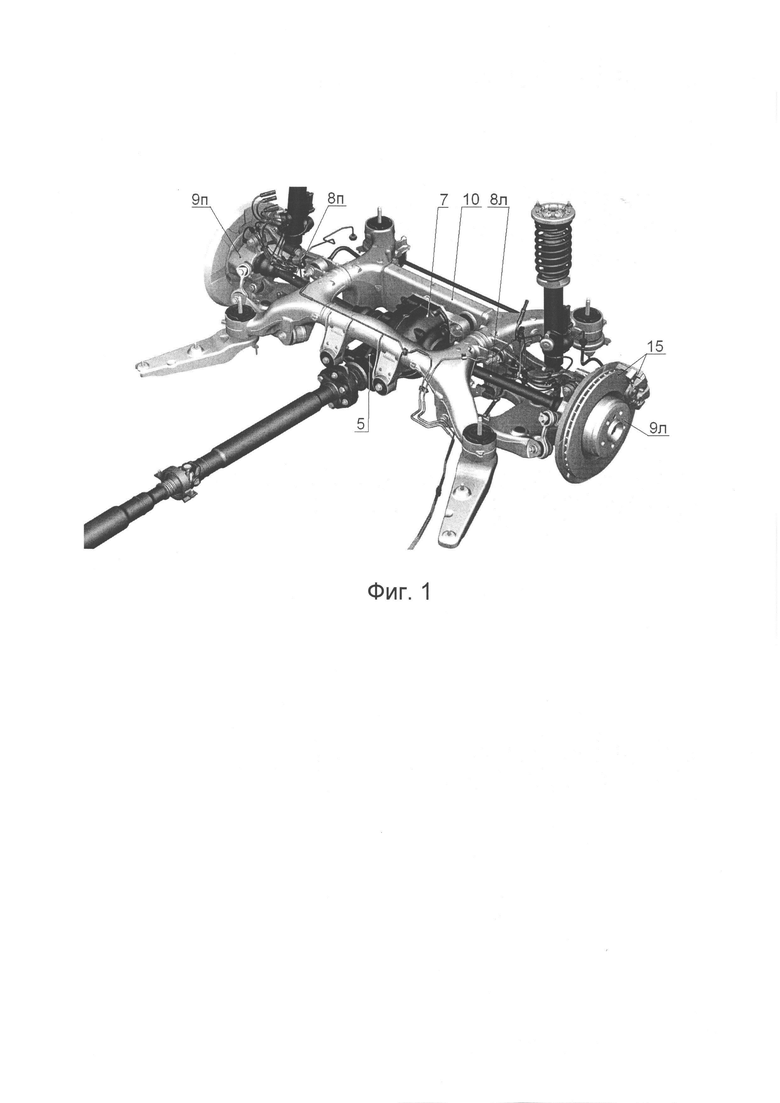
на фиг.1 показан общий вид одного из типовых ведущих мостов колесной машины, с фрагментами трансмиссии и подвески, при снятых (демонтированных) ведущих колесах;
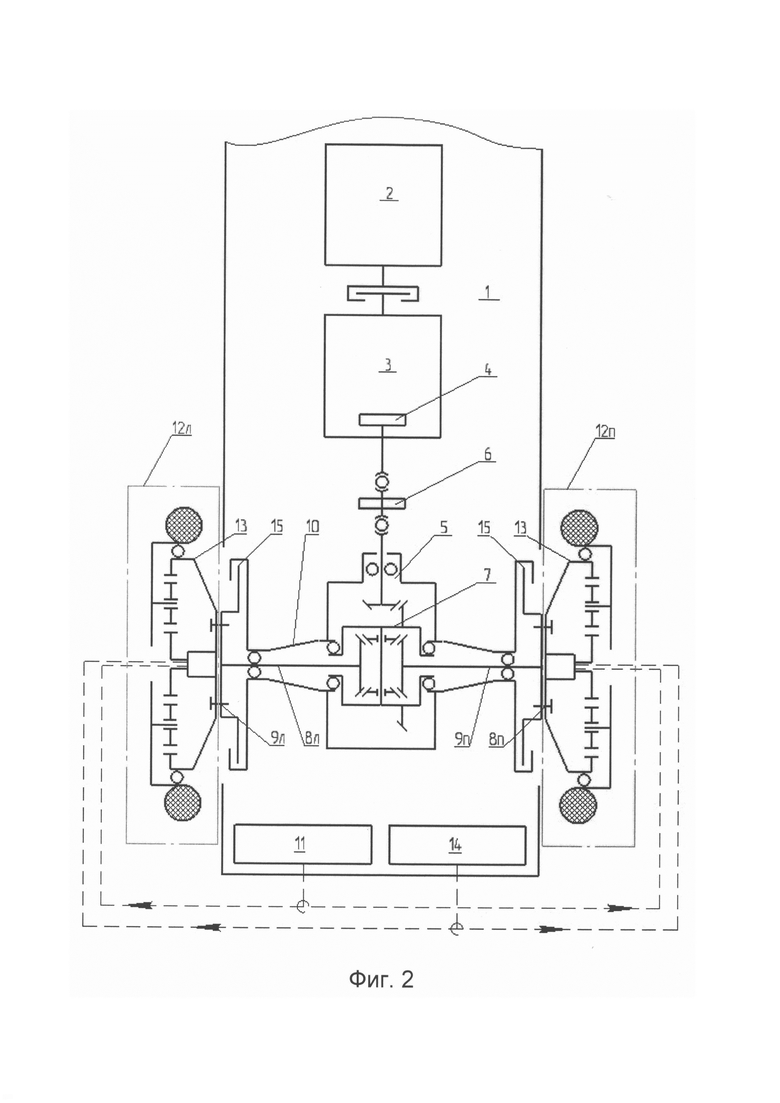
на фиг.2 - ведущий мост колесной машины (автомобиля) с временно установленными электромотор-колесами, вид в плане (сверху).
При этом устройство для осуществления заявляемого способа не рассматривается как оригинальное, не входит в объем правовых «притязаний» заявителя, опирается на широко известные, типовые конструкции колесной машины (автомобиля) [5] и электромотор-колеса [6], [7]. Главное - общая «геометрия» посадочных мест «родных» колес и временно устанавливаемых на их место электромотор-колес.
Позициями на фиг. 1, 2 обозначены:
1 - колесная машина, подлежащая эвакуации; 2 - двигатель внутреннего сгорания (ДВС); 3 - коробка передач (КП); 4 - низшая передача в КП; 5 - главная передача (ГП); 6 - паркинг или центральный (трансмиссионный) тормоз в КП; 7 - межколесный дифференциал; 8 - полуоси (2 шт. - левая 8л и правая 8п); 9 - ступицы (2 шт. - левая 9л и правая 9п); 10 - балка ведущего моста; 11 - автономный источник электрического питания (АИЭП) электромотор-колес; 12 - электромотор-колеса (2 шт. - левое 12л и правое 12п); 13 - редукторная часть электромотор-колеса (на примере однорядного планетарного редуктора с неподвижным эпициклом и съемом мощности с водила); 14 - система управления электромотор-колесами (СУ); 15 - тормоза ведущих колес.
Заявляемый способ в привязке к приведенному графическому изображению как примеру (см. фиг.1, 2) и указанного примерного устройства для осуществления способа можно описать следующим образом, как определенную оригинальную последовательность операций материальными средствами над материальными объектами:
- с вывешенного домкратом(ами) ведущего моста (например, заднего) аварийной колесной машины 1 снимают (демонтируют) «родные» колеса, даже если они в исправном состоянии, в результате чего мост приобретает вид, показанный на фиг.1;
- на освободившиеся посадочные места (на ступицы 9л, 9п со шпильками) устанавливают и жестко закрепляют (привинчивают гайками) электромотор-колеса 12л, 12п, в данном примере - их «статорной» частью при свободе вращения «роторной» части с планетарной редукторной частью 13, ободом и шиной (см. фиг.2), при этом не существенно, будет ли такая замена колес выполняться по схеме «снимают два колеса, устанавливают два электромотор-колеса» или «заменяют каждое колесо последовательно»;
- соединяют закрепленные на ступицах 9л, 9п электромотор-колеса 12л, 12п с источником электрической энергии (их электропитания - АИЭП) 11 и системой управления ими (СУ) 14;
- затормаживают (останавливают, стопорят, обездвиживают) детали, связанные с ведущей шестерней главной передачи за счет штатных средств аварийной машины 1 - в общем случае двигателя 2, трансмиссии (привода от ДВС 2 до ведущих колес), тормозной системы и системы управления 14 (обеспечении ею пресечения вращения полуосей 8л, 8п со ступицами 9л, 9п, конкретно -задании одинакового вращения мотор-колес 12п, 12л), обеспечивая тем самым их неподвижность (невозможность вращения) относительно балки 10 моста (а значит и реализацию тягового момента силы на электромотор-колесах 12л, 12п) [это ключевая операция], при этом последовательность последних двух операций может быть обратной, а в частных случаях способа полуоси 8л, 8п со ступицами 9л, 9п могут затормаживать (через упомянутые связанные с ними детали)
либо включением низшей передачи 4 в КП 3,
либо включением центрального (трансмиссионного) тормоза,
либо включением паркинга 6 (при его наличии, что в данном случае предпочтительно и рекомендуется),
либо включением остановочных тормозов 15 при ведущих колесах,
либо включением низшей передачи 4 в КП 3 и упомянутых тормозов совместно;
- запускают в работу СУ 14 и электрический привод электромотор-колес 12л, 12п, и перемещают тем самым аварийную машину 1 (осуществляют ее эвакуацию в автономном режиме).
Режимы движения машины 1 задают с учетом возможных (заранее определенных в процессе внедрения способа) ограничений по динамическому моменту сопротивления вращению «статорных» частей электромотор-колес 12л, 12п, а также динамическому опрокидывающему моменту, действующему на машину 1 со стороны электромотор-колес 12.
Таким образом, для эвакуации машины 1 (ее перемещения своим ходом в другую географическую точку) используют устройства эвакуации в составе замещающих колеса машины сменных электромотор-колес 12, а также АИЭП 11 с СУ 14, с возможностью создания тягового усилия и поворота для упомянутого перемещения машины 1.
Поворот машины 1 осуществляют поворотом «родных» управляемых ведомых колес и/или дифференцированным управлением скоростями вращения роторов электромотор-колес 12л, 12п (посредством СУ 14).
Торможение машины 1 осуществляется за счет тормозов ведомых колес (не показаны) и/или электрическим торможением в электромотор-колесах 12л, 12п через СУ 14 и/или встроенными в электромотор-колеса 12л, 12п тормозные устройства (не показаны).
По завершении эвакуации машины 1 электромотор-колеса 12л, 12п и АИЭП 11 с СУ 14 и инструментом возвращают на место, с возможностью неоднократного использования по указанному назначению.
Описанный(ые) конкретный(ые) пример(ы) способа не исключают других возможных примеров в рамках заявляемой совокупности существенных признаков (см. формулу изобретения).
Использование заявляемого изобретения позволяет решить поставленную задачу, упростив переоборудование аварийного автомобиля для его эвакуации способом замены ведущих колес электромотор-колесами, с предотвращением проворота ступиц реактивным моментом электромотор-колес.
| название | год | авторы | номер документа |
|---|---|---|---|
| Трансмиссия секционной колесной машины, преимущественно трактора с шарнирно-сочлененной рамой | 2022 |
|
RU2796857C1 |
| МЕХАНИЗМ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ В ТРАНСМИССИИ ТРАНСПОРТНОГО СРЕДСТВА | 2021 |
|
RU2763002C1 |
| Способ эвакуации аварийной машины и устройство для его осуществления | 2020 |
|
RU2739828C1 |
| Межосевой дифференциальный механизм распределения мощности | 2022 |
|
RU2785499C1 |
| МЕХАНИЗМ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ В ТРАНСМИССИИ АВТОМОБИЛЯ | 2016 |
|
RU2634062C1 |
| Механизм распределения мощности в трансмиссии транспортного средства | 2022 |
|
RU2789152C1 |
| ТРЕХОСНЫЙ АВТОМОБИЛЬ С КОМБИНИРОВАННОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ | 2013 |
|
RU2537931C1 |
| Двухрежимный дифференциальный механизм распределения мощности | 2024 |
|
RU2837931C1 |
| Мост ведущий управляемый комбинированный | 2023 |
|
RU2816386C1 |
| АВТОГРЕЙДЕР | 2023 |
|
RU2824766C1 |
Изобретение относится к эвакуации аварийных колесных транспортных средств. Способ эвакуации аварийной колесной машины путем ее перемещения с использованием устройства эвакуации в составе замещающих колеса машины сменных электромотор-колес, автономного источника электропитания, системы управления и тормозной системы, с возможностью создания тягового усилия и поворота для упомянутого перемещения машины. Предварительно снимают с моста машины, содержащего балку, ступицы и связанные через коробку передач с двигателем главную передачу, межколесный дифференциал, полуоси и ведущие колеса машины. Устанавливают на место колес на ступицах электромотор-колеса. Электрически соединяют мотор-колеса с источником энергии и системой управления. Затормаживают детали, связанные с полуосями со ступицами, за счет штатных средств аварийной машины - двигателя, трансмиссии, тормозной системы и системы управления. Обеспечивают неподвижность деталей относительно балки моста. Запускают в работу систему управления и электрический привод электромотор-колес. Перемещают аварийную машину в другую географическую точку. Достигается - упрощение переоборудования аварийной машины для ее эвакуации с предотвращением проворота ступиц реактивным моментом электромотор-колес. 4 з.п. ф-лы, 2 ил.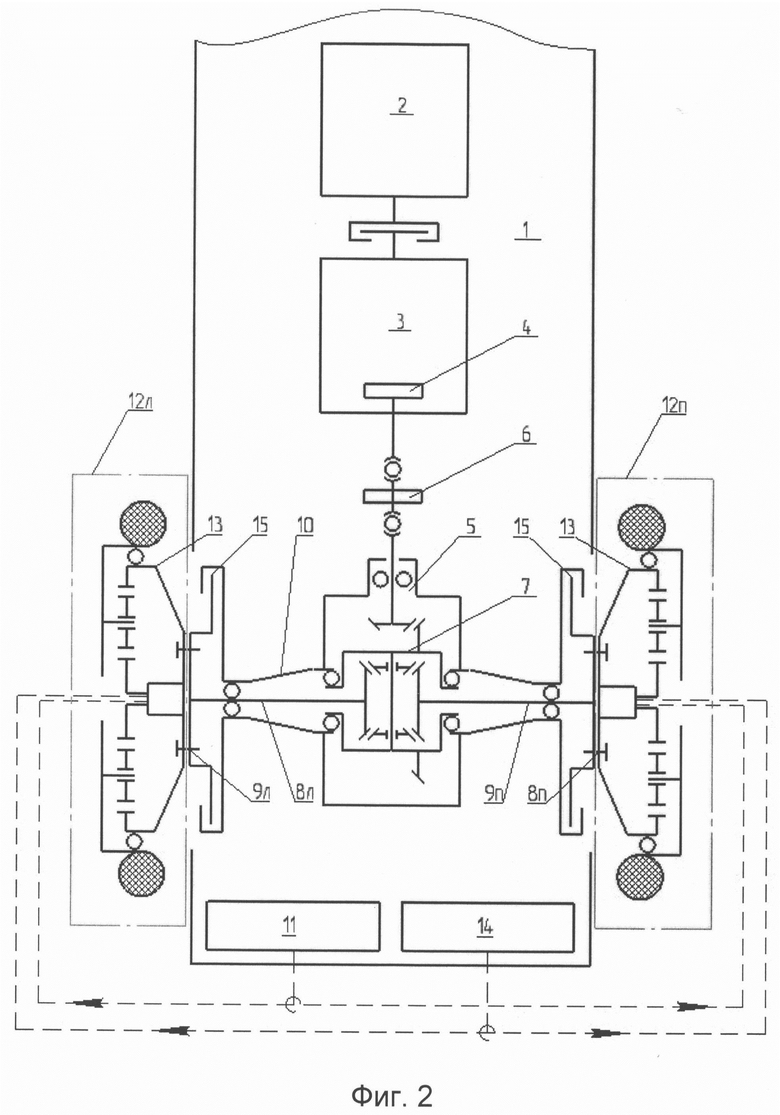
1. Способ эвакуации аварийной колесной машины путем ее перемещения с использованием устройства эвакуации в составе замещающих колеса машины сменных электромотор-колес, автономного источника электропитания, системы управления и тормозной системы, с возможностью создания тягового усилия и поворота для упомянутого перемещения машины, предварительно снимая с моста машины, содержащего балку, ступицы и связанные через коробку передач с двигателем главную передачу, межколесный дифференциал и полуоси, ведущие колеса машины и устанавливая на их место на ступицах упомянутые электромотор-колеса, электрически соединяя их с упомянутыми источником энергии и системой управления, запуская в работу систему управления и электрический привод электромотор-колес, и перемещая таким образом аварийную машину в другую географическую точку, отличающийся тем, что перед запуском электромотор-колес в работу затормаживают детали, связанные с полуосями со ступицами, за счет штатных средств аварийной машины - в общем случае двигателя, трансмиссии, тормозной системы и системы управления, обеспечивая тем самым их неподвижность относительно балки моста.
2. Способ эвакуации по п. 1, отличающийся тем, что детали, связанные с полуосями со ступицами, затормаживают включением низшей передачи в коробке передач.
3. Способ эвакуации по п. 1, отличающийся тем, что детали, связанные с полуосями со ступицами, затормаживают включением центрального тормоза, предусмотренного в трансмиссии.
4. Способ эвакуации по п. 1, отличающийся тем, что детали, связанные с полуосями со ступицами, затормаживают включением паркинга, предусмотренного в трансмиссии.
5. Способ эвакуации по п. 1, отличающийся тем, что детали, связанные с полуосями со ступицами, затормаживают включением низшей передачи в коробке передач и центрального тормоза, предусмотренного в трансмиссии.
| RU 2021112530 A, 28.10.2022 | |||
| Способ эвакуации аварийной машины и устройство для его осуществления | 2020 |
|
RU2739828C1 |
| СПОСОБ ЭВАКУАЦИИ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2724194C1 |
| Видеоролик | |||
| Установка мотор-колес (мотор ступиц) на автомобиль | |||
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
| US 2006144626 A1, 06.07.2006 | |||
| US 5494126 A, 27.02.1996. | |||

