Настоящее изобретение относится к бортовым автоматическим системам управления движением и стабилизации летательного аппарата, выполненного по нормальной аэродинамической схеме, совершающего маневры в широком диапазоне скоростей и высот полета, подвергающегося в процессе полета внешним и внутренним возмущающим воздействиям.
Из существующего уровня техники известны способ формирования сигнала угловой стабилизации по крену летательного аппарата с оценкой и компенсацией внешнего возмущения и устройство для его осуществления (RU 2601032, опубл. 29.09.2015), способ формирования сигнала (RU 2339990, опубл. 27.11.2008).
Недостатками данных технических решений является необходимость введения дополнительных измерительных устройств для измерения скоростного напора и отсутсвтие учета допусков на аэродинамические характеристики летательного аппарата.
Наиболее близким к предлагаемому изобретению является «Способ формирования сигнала управления боковым движением летательного аппарата и устройство для его осуществления» (RU 2339990, опубл. 27.11.2008).
Этот способ состоит в том, что задают сигнал управления по курсу, измеряют сигнал углового положения и угловой скорости по курсу летательного аппарата, формируют сигнал рассогласования по курсу, равный разности сигналов управления и углового положения по курсу, усиливают сигнал рассогласования и угловой скорости по курсу, суммируют усиленный сигнал рассогласования и угловой скорости по курсу, измеряют сигнал углового положения и угловой скорости по крену, формируют сигнал рассогласования по крену, равный разности сигналов управления и углового положения по крену, усиливают сигнал рассогласования и угловой скорости по крену и суммируют усиленный сигнал рассогласования и угловой скорости по крену, формируют выходной сигнал управления по курсу посредством ограничения суммарного сигнала по курсу, формируют сигнал модульной функции как сумму релейного и нелинейного компонентов сигнала управления по курсу, формируют базовый сигнал управления по крену, равный сигналу управления по курсу при превышении сигналом модульной функции заданной величины зоны нечувствительности релейной и нелинейной компонент и равный нулю в противном случае, фильтруют базовый сигнал управления по крену, инвертируют отфильтрованный сигнал, формируют сигнал управления по крену как усиленный инвертированный сигнал и формируют выходной сигнал управления по крену посредством ограничения суммарного сигнала по крену.
Недостатками способа, принятого за прототип, являются отсутствие учета априорной информации о возмущающих воздействиях, отсутствие учета неточностей знания параметров атмосферы и неточностей знания аэродинамических характеристик летательного аппарата.
Решаемой в предлагаемом способе формирования адаптивного сигнала угловой стабилизации по крену летательного аппарата технической задачей является обеспечение повышенных показателей точности и быстродействия отработки действующих на летательный аппарат возмущений в канале крена в широком диапазоне скоростей и высот полета.
Для решения указанной технической задачи в процессе полета производят идентификацию аэродинамических характеристик летательного аппарата на основе восстановления углов атаки и скольжения, измеренных углов тангажа, рыскания и крена, углов отклонения рулевых поверхностей, угловой скорости тангажа, угловой скорости рыскания, угловой скорости крена, а также поперечного и нормальное ускорений, при этом восстановление углов атаки и скольжения производят с использованием линейного непрерывного фильтра Калмана с учетом погрешностей измерений нормального и поперечного ускорений и угловых скоростей тангажа, рыскания и крена, корректируют коэффициенты стабилизации контура крена летательного аппарата, формируют адаптивный сигнал угловой стабилизации по крену летательного аппарата на основе скорректированных коэффициентов.
Последовательность реализации способа формирования адаптивного сигнала угловой стабилизации по крену летательного аппарата описывается следующим образом.
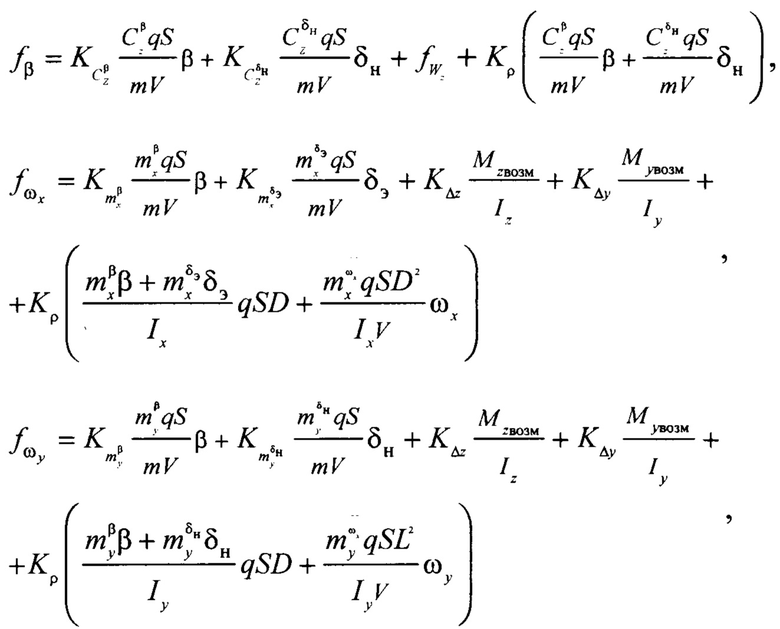
Уравнения возмущенного движения летательного аппарата имеют следующий вид (1):
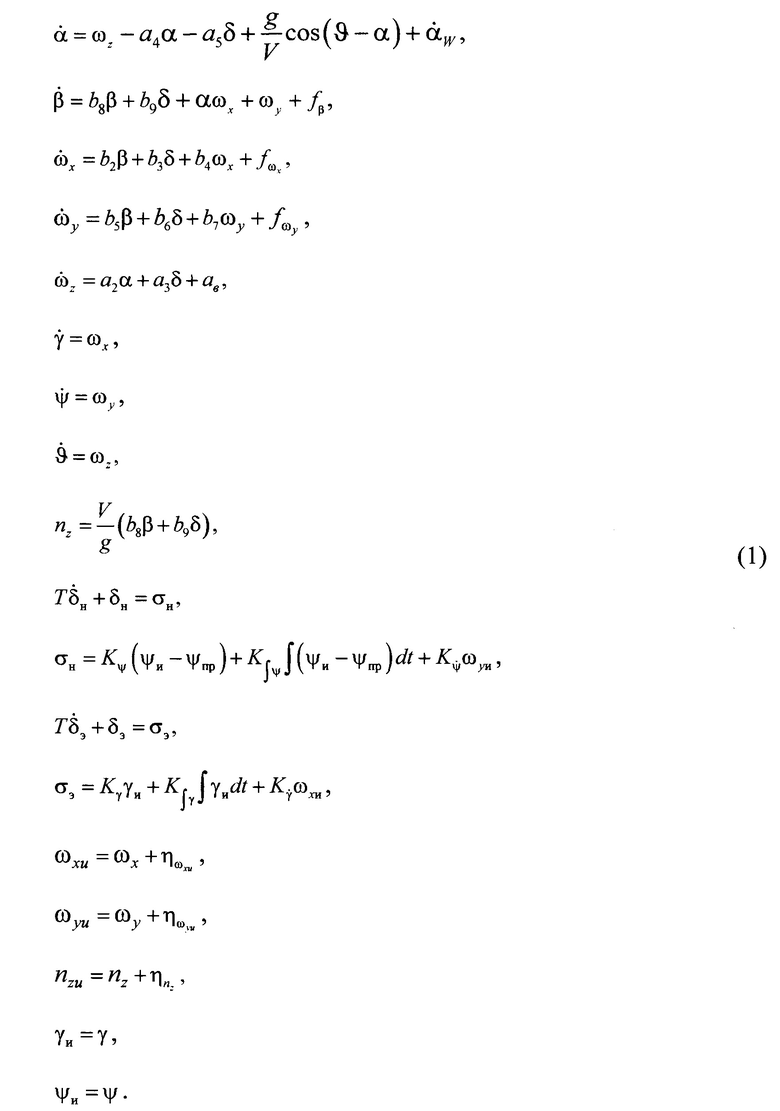
где  - угол атаки, угол скольжения, угловые скорости крена, рыскания и тангажа соответственно,
- угол атаки, угол скольжения, угловые скорости крена, рыскания и тангажа соответственно,
 - аэродинамические коэффициенты ЛА,
- аэродинамические коэффициенты ЛА,
q - скоростной напор,
m - масса ЛА,
S - характерная площадь ЛА,
L - характерная длина ЛА для приведения аэродинамических характеристик в каналах тангажа и рыскания,
D - характерный диаметр ЛА для приведения аэродинамических характеристик в канале крена,
V- скорость ЛА,
 - моменты инерции ЛА,
- моменты инерции ЛА,
 - изменение угловой скорости угла атаки за счет ветрового воздействия,
- изменение угловой скорости угла атаки за счет ветрового воздействия,
 - возмущающее угловое ускорение по каналу тангажа,
- возмущающее угловое ускорение по каналу тангажа,
 - управляющие сигналы на рули направления и крена,
- управляющие сигналы на рули направления и крена,
 - суммарные углы отклонения рулей, задействованных в каналах рыскания и крена,
- суммарные углы отклонения рулей, задействованных в каналах рыскания и крена,
 - суммарные измеренные углы отклонения рулей, задействованных в каналах рыскания и крена,
- суммарные измеренные углы отклонения рулей, задействованных в каналах рыскания и крена,
 - возмущающие воздействия:
- возмущающие воздействия:
 - допуска на аэродинамические характеристики, %,
- допуска на аэродинамические характеристики, %,
 - возмущения, вызываемые ветровыми воздействиями,
- возмущения, вызываемые ветровыми воздействиями,
 - скорость горизонтального ветра в поперечном направлении, м/с,
- скорость горизонтального ветра в поперечном направлении, м/с,
 - отклонение плотности воздуха от номинальных значений, %,
- отклонение плотности воздуха от номинальных значений, %,
 - допуска на положение центра масс ЛА в вертикальном и поперечном направлениях, м,
- допуска на положение центра масс ЛА в вертикальном и поперечном направлениях, м,
Т - постоянная времени рулевого привода,
 - программное значение угла рыскания,
- программное значение угла рыскания,
 - коэффициенты стабилизации контура рыскания,
- коэффициенты стабилизации контура рыскания,
 - коэффициенты стабилизации контура крена.
- коэффициенты стабилизации контура крена.
Математическая модель измерений описывается системой уравнений (2)

Здесь  - измеренные значения поперечной перегрузки и углов отклонения рулевых поверхностей соответственно,
- измеренные значения поперечной перегрузки и углов отклонения рулевых поверхностей соответственно,
 - ошибки измерений угловых скоростей крена, рыскания, тангажа, нормальной и поперечной перегрузок соответственно.
- ошибки измерений угловых скоростей крена, рыскания, тангажа, нормальной и поперечной перегрузок соответственно.
Восстановление угла скольжения проводится на основе линейного непрерывного фильтра Калмана.
Векторные уравнения фильтра Калмана (3) приведены ниже:

где  - вектор оцениваемых параметров,
- вектор оцениваемых параметров,
А - матрица правой части математической модели движения (1),
u - вектор известных составляющих правой части,
P - матрица ковариаций ошибки оценки в процессе оценки,
Н - известная матрица правой части модели измерений,
R - матрица ковариаций шумов измерений,
Q - матрица ковариаций внешних возмущений.
Восстановление угла скольжения, а также оценки измеряемых с погрешностями угловых скоростей крена и рыскания, проводятся с использованием следующих уравнений (4):
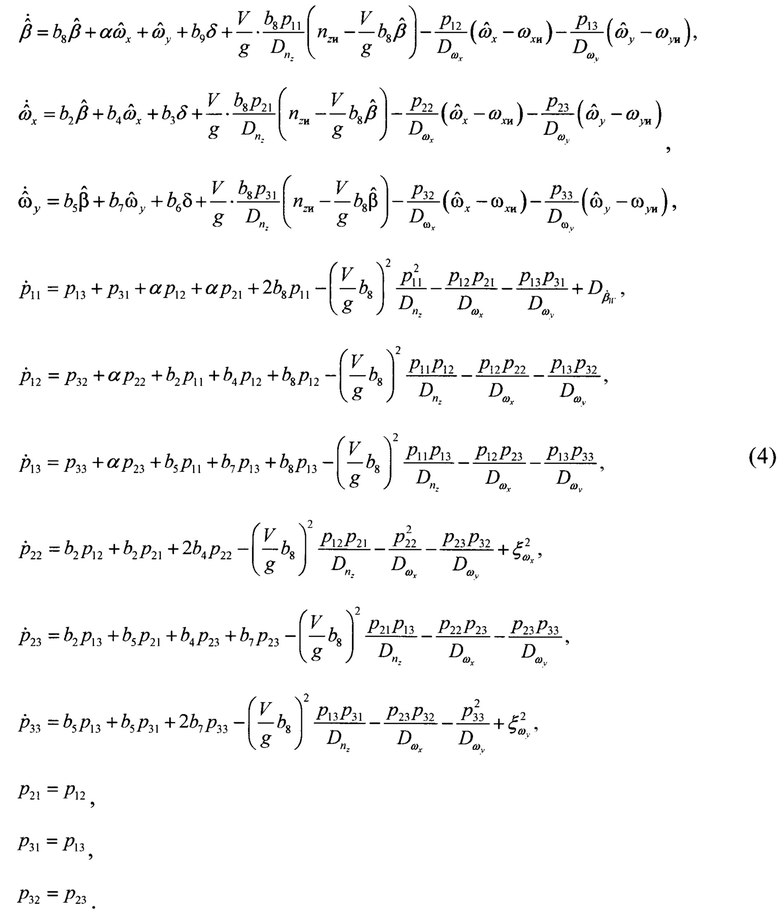
Здесь  - оценки углов скольжения и угловых скоростей крена и рыскания,
- оценки углов скольжения и угловых скоростей крена и рыскания,  - априорные дисперсии измерений,
- априорные дисперсии измерений,  - априорная дисперсия угловой скорости ветрового порыва.
- априорная дисперсия угловой скорости ветрового порыва.
На основании уравнения (1) можно записать выражение для определения реализованного коэффициента 

Адаптивный сигнал угловой стабилизации по крену летательного аппарата формируется на основе скорректированных коэффициентов  по формулам (6), (7):
по формулам (6), (7):
Здесь  - значение коэффициента
- значение коэффициента  для номинальных аэродинамических характеристик,
для номинальных аэродинамических характеристик,  - коэффициенты стабилизации, обеспечивающие выполнение требований к точности и быстродействию переходных процессов при номинальных аэродинамических характеристиках, D - добротность рулевого привода,
- коэффициенты стабилизации, обеспечивающие выполнение требований к точности и быстродействию переходных процессов при номинальных аэродинамических характеристиках, D - добротность рулевого привода,  вычисляются по формуле (8):
вычисляются по формуле (8):

Сформированные адаптивные сигналы угловой стабилизации летательного аппарата  имеют вид (9), (10):
имеют вид (9), (10):

Предложенная схема коррекции коэффициентов контура стабилизации на основе идентифицированных аэродинамических коэффициентов позволяет повысить точность и быстродействиие переходных процессов отработки возмущений.
Эффективность принятого подхода к коррекции коэффициентов в процессе полета подтверждена результатами анализа и математического моделирования.
Все составные операции способа могут быть выполнены программно-алгоритмически в бортовых вычислительных машинах беспилотных летательных аппаратов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ формирования адаптивного сигнала управления боковым движением летательного аппарата | 2017 |
|
RU2650307C1 |
| Способ формирования сигнала стабилизации продольного углового движения беспилотного летательного аппарата | 2016 |
|
RU2615028C1 |
| Способ коррекции бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2635820C1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ДВУХКИЛЕВОГО ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КУРСА | 2020 |
|
RU2765837C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА С АДАПТИВНОЙ ПЕРЕКРЕСТНОЙ СВЯЗЬЮ | 2019 |
|
RU2736400C1 |
| Бесплатформенная инерциальная курсовертикаль | 2016 |
|
RU2643201C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК УПРАВЛЯЕМОГО СНАРЯДА В ПОЛЕТЕ, СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА АТАКИ УПРАВЛЯЕМОГО СНАРЯДА В ПОЛЕТЕ, СПОСОБ СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВА ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2218550C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЭРОДИНАМИЧЕСКОГО УГЛА ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2341775C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КРЕНА | 2020 |
|
RU2753776C1 |
| Адаптивная бесплатформенная инерциальная курсовертикаль | 2016 |
|
RU2647205C2 |
Изобретение относится к способу формирования адаптивного сигнала угловой стабилизации по крену летательного аппарата. Для формирования сигнала в процессе полета производят идентификацию аэродинамических характеристик летательного аппарата на основе восстановления углов атаки и скольжения, измеренных углов тангажа, рыскания и крена, углов отклонения рулевых поверхностей, угловой скорости тангажа, угловой скорости рыскания, угловой скорости крена, а также поперечного и продольного ускорений. При этом восстановление углов атаки и скольжения производят с использованием линейного непрерывного фильтра Калмана с учетом погрешностей измерений поперечного и продольного ускорений и угловых скоростей тангажа, рыскания и крена. Корректируют коэффициенты стабилизации контура крена летательного аппарата и на основе скорректированных коэффициентов формируют адаптивный сигнал угловой стабилизации по крену летательного аппарата. Изобретение позволяет повысить показатели точности и быстродействия отработки действующих на летательный аппарат возмущений в канале крена в широком диапазоне скоростей и высот полета.
Способ формирования адаптивного сигнала угловой стабилизации по крену летательного аппарата, при котором производят идентификацию аэродинамических характеристик летательного аппарата на основе восстановления углов атаки и скольжения, измеренных углов тангажа, рыскания и крена, углов отклонения рулевых поверхностей, угловой скорости тангажа, угловой скорости рыскания, угловой скорости крена, а также поперечного и продольного ускорений, при этом восстановление углов атаки и скольжения производят с использованием линейного непрерывного фильтра Калмана с учетом погрешностей измерений поперечного и продольного ускорений и угловых скоростей тангажа, рыскания и крена, корректируют коэффициенты стабилизации контура крена летательного аппарата, формируют адаптивный сигнал угловой стабилизации по крену летательного аппарата на основе скорректированных коэффициентов.
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339990C1 |
| Способ формирования адаптивного сигнала управления боковым движением летательного аппарата | 2017 |
|
RU2650307C1 |
| Устройство координированного регулирования углового бокового движения летательного аппарата | 1990 |
|
SU1751716A1 |
| АДАПТИВНАЯ СИСТЕМА ТЕРМИНАЛЬНОГО УПРАВЛЕНИЯ | 2012 |
|
RU2500009C1 |
| US 5050086 A1, 17.09.1991 | |||
| US 8442701 B2, 14.05.2013. | |||
