Изобретение относится к системам управления (СУ) пилотируемого летательного аппарата (ЛА) в каналах крена и рыскания.
Основной особенностью управления ЛА в канале крена, приводящей к ухудшению качества управления, является взаимодействие движений рыскания и крена, связанное, в частности, с возникновением угла скольжения β при отклонении ручки управления самолетом (РУС) по крену  Для устранения этого эффекта используют подключение руля направления к поперечному управлению (Ю.П. Гуськов, Г.И. Загайнов. Управление полетом самолетов, Москва.: «Машиностроение», 1980 г., с. 115). Подобный подход использован в СУ самолетом F-15 (Г.С. Бюшгенс, Р.В. Студнев. Аэродинамика самолета. Динамика продольного и бокового движения, Москва.: «Машиностроение», 1979 г., с. 315, рис. 36.6б; с. 316, рис. 36.7).
Для устранения этого эффекта используют подключение руля направления к поперечному управлению (Ю.П. Гуськов, Г.И. Загайнов. Управление полетом самолетов, Москва.: «Машиностроение», 1980 г., с. 115). Подобный подход использован в СУ самолетом F-15 (Г.С. Бюшгенс, Р.В. Студнев. Аэродинамика самолета. Динамика продольного и бокового движения, Москва.: «Машиностроение», 1979 г., с. 315, рис. 36.6б; с. 316, рис. 36.7).
Наиболее близким аналогом по отношению к заявляемой СУ пилотируемым ЛА в боковом движении служит система управления, представленная в работе: Г.С. Бюшгенс, Р.В. Студнев. Аэродинамика самолета: Динамика продольного и бокового движения. - Москва.: «Машиностроение», 1979, 352 с, с. 308, рис. 36.1.
Данная СУ содержит датчик положения ручки управления самолетом по крену (ДПРЭ), датчик угловой скорости крена ωХ, систему воздушных сигналов (СВС), формирующую сигналы динамического (qдин) и статического (qстат) скоростного напора и статического давления (Рст), первый, второй и третий фильтры подавления помех, вход второго фильтра подавления помех соединен с выходом датчика положения ручки управления самолетом по крену (ДПРЭ), форсирующий фильтр, датчик положения педалей (ДПП), выход которого соединен с входом первого фильтра подавления помех, датчик угловой скорости рыскания ωу, датчик линейных ускорений (ДЛУ) в боковой плоскости, датчик углов атаки и скольжения (ДУАС), первый, второй, третий, четвертый, пятый и шестой масштабирующие блоки, рулевой привод элеронов, рулевой привод руля направления, первый сумматор, первый и второй входы которого соединены соответственно с выходами первого и второго масштабирующих блоков, а выход подключен к входу рулевого привода элеронов, второй сумматор, выход которого подключен к входу рулевого привода руля направления, входы первого масштабирующего блока и шестого масштабирующего блока соединены с выходом датчика угловой скорости крена, входы второго масштабирующего блока и третьего масштабирующего блока подключены к выходу второго фильтра подавления помех, вход и выход четвертого масштабирующего блока соединены соответственно с выходом датчика угловой скорости рыскания и с входом форсирующего фильтра, вход и выход пятого масштабирующего блока подключены соответственно к выходу датчика линейных ускорений и к входу третьего фильтра подавления помех, первый, второй, третий, четвертый и пятый входы второго сумматора соединены соответственно с выходами третьего масштабирующего блока, шестого масштабирующего блока, первого фильтра подавления помех, форсирующего фильтра и третьего фильтра подавления помех. Функциональное назначение всех блоков и работа рассмотренной СУ подробно изложены в работе: Г.С. Бюшгенс, Р.В. Студнев. Аэродинамика самолета: Динамика продольного и бокового движения. - М.: «Машиностроение», 1979, 352 с., с. 309. Заметим только, что рулевая машина и бустер (рис. 36.1) конструктивно совмещены в современных рулевых приводах в единое устройство.
Недостаток данной СУ с перекрестной связью сигналов управления в канале крена с сигналами управления в канале рыскания состоит в том, что такое управление позволяет обеспечить оптимальное соотношение между величинами угловой скорости крена и скольжения при управлении в канале крена только для квазиустановившихся режимов. Эти режимы характеризуются малым изменением угла атаки при выполнении маневра, когда предыстория маневра не играет существенной роли. Примером такого маневра может служить выполнение «бочки». Иная картина наблюдается в пространственных маневрах с интенсивным изменением фазовых координат не только в боковом, но и в продольном движении. Примером такого маневра является т.н. «диагональная дача», когда отклонение РУС производится и по тангажу, и по крену. При таком маневрировании характер движения самолета меняется в зависимости от последовательности перемещения РУС в каждом из каналов управления (по крену и рысканию) и от степени одновременности действий пилота между каналами. Выполнение таких маневров характеризуется «накоплением» угла скольжения, величина которого в конечной фазе траектории в окрестности максимально допустимого угла атаки существенно превышает угол скольжения, который может быть достигнут на этом же угле атаки при квазиустановившемся маневре с вращением по крену без значительного изменения угла атаки. В этом случае перекрестная связь в существующих системах, как показывают летные испытания, не обеспечивает уменьшение «тормозящего» угла скольжения до уровня, который позволяет сохранить управляемость в канале крена. Происходит остановка вращения или даже обратная реакция по крену, что недопустимо. Степень нестационарности продольного движения в пространственном маневре определяется темпом изменения угла атаки, который пропорционален скорости и величине отклонения ручки управления по тангажу.
Техническим результатом, достигаемым в заявляемой системе управления пилотируемого летательного аппарата с адаптивной перекрестной связью, является сохранение удовлетворительной (соответствующей нормативным требованиям) управляемости пилотируемого ЛА по крену во всем диапазоне допустимых углов атаки при выполнении произвольных пространственных маневров.
Заявленный результат обеспечивается тем, что система управления пилотируемым ЛА использует имеющийся на ЛА датчик положения РУС по тангажу (ДПРυ), дополнительно содержит первый, второй и третий нелинейные корректирующие блоки, первый, второй и третий блоки перемножения, седьмой масштабирующий блок, вход которого соединен с выходом первого фильтра подавления помех, а выход - с третьим входом второго сумматора, вход первого нелинейного корректирующего блока соединен с выходом ДУАС, вход второго нелинейного корректирующего блока подключен к выходу датчика положения РУС по тангажу (ДПРυ), вход третьего нелинейного корректирующего блока соединен с выходом Рст СВС, к первому и второму входам первого блока перемножения подключены соответственно выходы второго масштабирующего блока и первого нелинейного корректирующего блока, первый и второй входы второго блока перемножения соединены соответственно с выходами первого блока перемножения и второго нелинейного корректирующего блока, первый и второй входы третьего блока перемножения соединены соответственно с выходами второго блока перемножения и третьего нелинейного корректирующего блока, второй сумматор снабжен шестым входом, к которому подключен выход третьего блока перемножения.
Положительный эффект достигается за счет введения в СУ адаптивной перекрестной связи между каналами крена и рыскания, с помощью которой изменяется величина общего передаточного коэффициента этой связи в зависимости от интенсивности пространственного движения. Тем самым обеспечивается сохранение величины возникающего угла скольжения в пределах, гарантирующих удовлетворительную поперечную управляемость. Адаптивность перекрестной связи между каналами крена и рыскания достигается за счет введения дополнительной коррекции величины передаточного коэффициента перекрестной связи в зависимости от величины перемещения РУС в продольной плоскости. Эта дополнительная коррекция в свою очередь изменяется в зависимости от угла атаки и величины статического давления (от высоты полета). При пространственном маневре, инициированном значительным отклонением РУС по тангажу в сочетании с перемещением РУС по крену происходит усиление передаточного коэффициента перекрестной связи, достаточное для парирования развития угла скольжения с необходимым опережением.
Сущность изобретения поясняется следующими графическими изображениями:
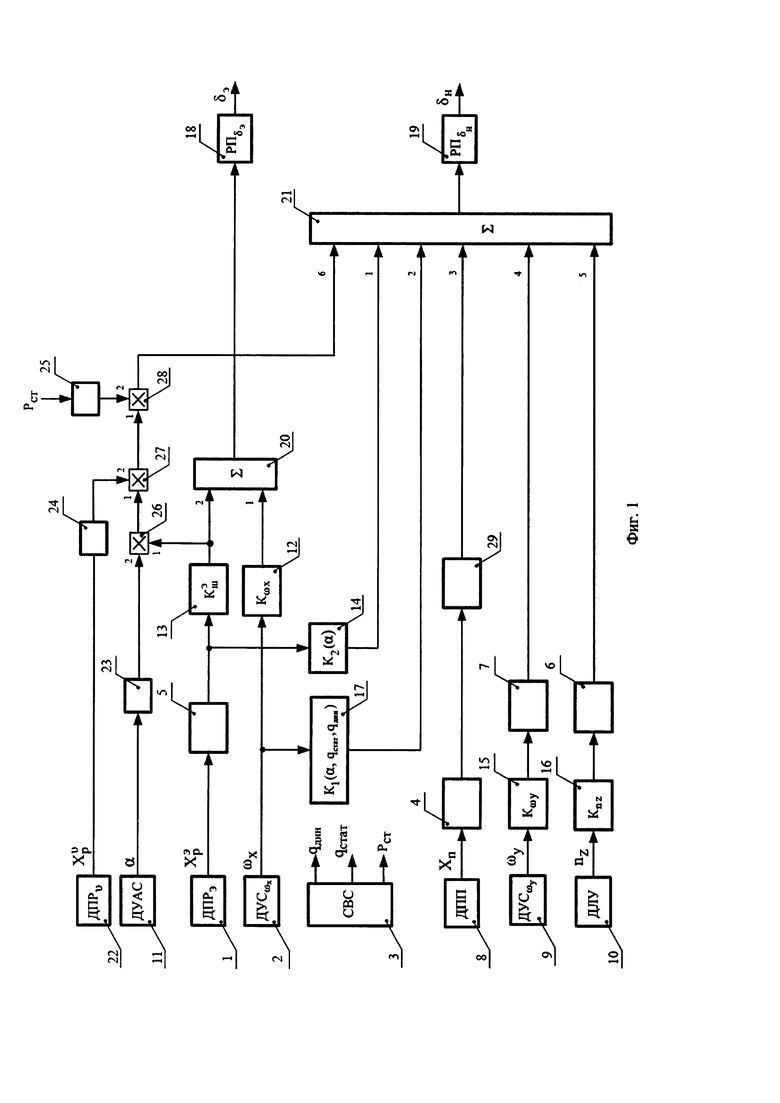
на фиг. 1 изображена система управления пилотируемого летательного аппарата с адаптивной перекрестной связью;
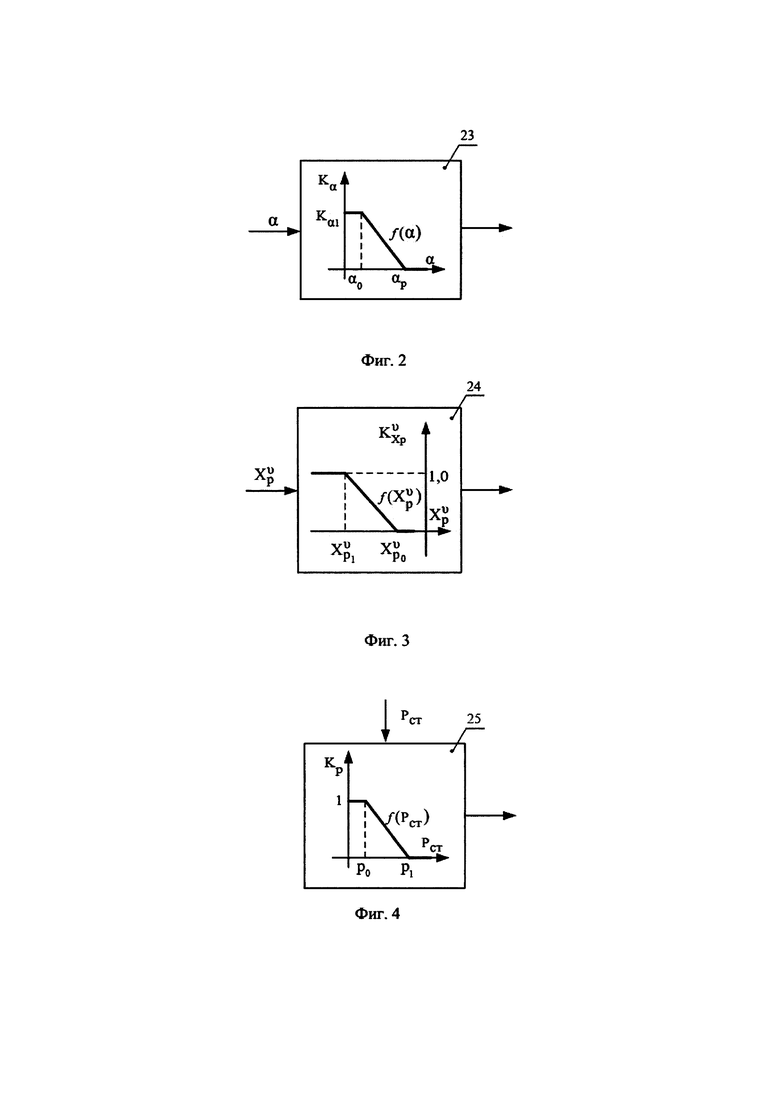
на фиг. 2 приведена структура первого нелинейного корректирующего блока (график изменения дополнительного коэффициента перекрестной связи по углу атаки);
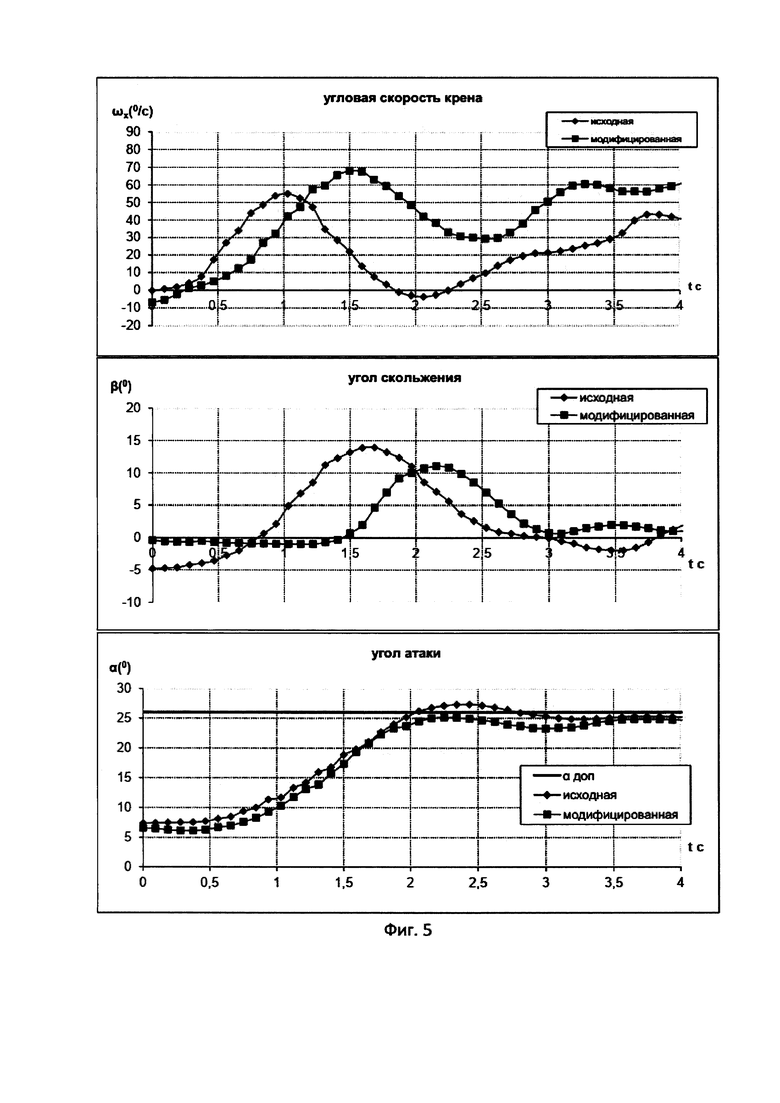
на фиг. 3 показана структура второго нелинейного корректирующего блока (график изменения дополнительного коэффициента перекрестной связи по отклонению РУС в продольном канале управления);
на фиг. 4 изображена структура третьего нелинейного корректирующего блока (график изменения дополнительного коэффициента перекрестной связи по величине статического давления - по высотам полета);
на фиг. 5 приведены графики изменения параметров движения маневренного ЛА при «диагональной даче» РУС в натурных летных испытаниях.
На фиг. 1÷5 использованы следующие обозначения:
1 - датчик положения РУС по крену (ДПРЭ);
2 - датчик угловой скорости по угловой скорости крена 
3 - система воздушных сигналов (СВС);
4, 5, 6 - первый, второй и третий фильтры подавления помех;
7 - форсирующий фильтр;
8 - датчик положения педалей (ДПП);
9 - датчик угловой скорости по угловой скорости рыскания 
10 - датчик линейных ускорений (ДЛУ) в боковой плоскости движения самолета;
11 - датчик углов атаки и скольжения (ДУАС);
12, 13, 14, 15, 16, 17 - соответственно первый, второй, третий, четвертый, пятый и шестой масштабирующие блоки;
18 - рулевой привод элеронов 
19 - рулевой привод руля направления (РПδн);
20, 21 - первый и второй сумматоры;
22 - датчик положения РУС по тангажу (ДПРυ);
23, 24, 25 - первый, второй и третий нелинейные корректирующие блоки;
26, 27, 28 - первый, второй и третий блоки перемножения сигналов;
29 - седьмой масштабирующий блок;
 - сигнал с выхода датчика перемещения РУС по крену;
- сигнал с выхода датчика перемещения РУС по крену;
 - сигнал с выхода датчика перемещения РУС по тангажу;
- сигнал с выхода датчика перемещения РУС по тангажу;
ωх - сигнал с выхода ДУС крена;
qдин, qстат, M, Pст - сигналы динамического и статического скоростного напора, и статического давления с соответствующих выходов СВС;
Хп - сигнал перемещения педалей;
ωу - сигнал угловой скорости рыскания;
nz - сигнал перегрузки в боковом канале;
α - сигнал угла атаки;
δэ - угол отклонения элеронов;
δн - угол отклонения руля направления;
υ - угол тангажа;
t - текущее время;
αдоп - максимально допустимое значение угла атаки;
nудоп - максимально допустимое значение перегрузки;
β - текущее значение угла скольжения;
Kα - коэффициент, дополнительно корректирующий уровень перекрестной связи между каналами крена и рыскания по углу атаки;
 - коэффициент, дополнительно корректирующий уровень перекрестной связи между каналами крена и рыскания по РУС по тангажу;
- коэффициент, дополнительно корректирующий уровень перекрестной связи между каналами крена и рыскания по РУС по тангажу;
Kp - коэффициент, дополнительно корректирующий уровень перекрестной связи между каналами крена и рыскания по статическому давлению Рст (по высотам полета);
α0, αр - границы интервала изменения углов атаки в первом нелинейном корректирующем блоке;
 - границы интервала изменения положения РУС по тангажу во втором нелинейном корректирующем блоке;
- границы интервала изменения положения РУС по тангажу во втором нелинейном корректирующем блоке;
р0, p1 - границы интервала изменения статического давления в третьем нелинейном корректирующем блоке.
Система управления пилотируемого летательного аппарата с адаптивной перекрестной связью (фиг. 1) содержит датчик (1) положения РУС по крену (ДПРэ), датчик (2) угловой скорости крена ωх, систему (3) воздушных сигналов (СВС), формирующую сигналы динамического (qдин) и статического (qстат) скоростного напора и статического давления (Рст), первый (4), второй (5) и третий (6) фильтры подавления помех, вход второго фильтра подавления помех (5) соединен с выходом датчика (1) положения РУС по крену (ДПРэ), форсирующий фильтр (7), датчик (8) положения педалей (ДПП), выход которого соединен с входом первого фильтра (4), датчик (9) угловой скорости рыскания ωу, датчик (10) линейных ускорений (ДЛУ) в боковой плоскости, датчик (11) углов атаки и скольжения (ДУАС), первый (12), второй (13), третий (14), четвертый (15), пятый (16) и шестой (17) масштабирующие блоки, рулевой привод элеронов (18), рулевой привод руля направления (19), первый сумматор (20), первый и второй входы которого соединены соответственно с выходами первого (12) и второго (13) масштабирующих блоков, а выход подключен к входу рулевого привода элеронов (18), второй сумматор (21), выход которого подключен к входу рулевого привода руля направления (19), входы первого масштабирующего блока (12) и шестого масштабирующего блока (17) соединены с выходом датчика (2) угловой скорости крена, входы второго масштабирующего блока (13) и третьего масштабирующего блока (14) подключены к выходу второго фильтра подавления помех (5), вход и выход четвертого масштабирующего блока (15) соединены соответственно с выходом датчика угловой скорости рыскания (9) и с входом форсирующего фильтра (7), вход и выход пятого масштабирующего блока (16) подключены соответственно к выходу датчика линейных ускорений (10) и к входу третьего фильтра подавления помех (6), первый, второй, четвертый и пятый входы второго сумматора (21) соединены соответственно с выходами третьего масштабирующего блока (14), шестого масштабирующего блока (17), форсирующего фильтра (7) и третьего фильтра подавления помех (6). Кроме того, СУ использует имеющийся на ЛА датчик (22) положения РУС по тангажу (ДПРυ), дополнительно содержит первый (23), второй (24) и третий (25) нелинейные корректирующие блоки, первый (26), второй (27) и третий (28) блоки перемножения, седьмой масштабирующий блок (29), вход которого соединен с выходом первого фильтра подавления помех (4), а выход - с третьим входом второго сумматора (21), вход первого нелинейного корректирующего блока (23) соединен с выходом ДУАС (11), вход второго нелинейного корректирующего блока (24) подключен к выходу датчика (22) положения ручки управления самолетом по тангажу (ДПРυ), вход третьего нелинейного корректирующего блока (25) соединен с выходом Рст СВС (3), к первому и второму входам первого блока перемножения (26) подключены соответственно выходы второго масштабирующего блока (13) и первого нелинейного корректирующего блока (23), первый и второй входы второго блока перемножения (27) соединены соответственно с выходами первого блока перемножения (26) и второго нелинейного корректирующего блока (24), первый и второй входы третьего блока перемножения (28) соединены соответственно с выходами второго блока перемножения (27) и третьего нелинейного корректирующего блока (25), второй сумматор (21) снабжен шестым входом, к которому подключен выход третьего блока перемножения (28).
Структуры первого, второго и третьего нелинейных корректирующих блоков представлены на фиг. 2, фиг. 3 и фиг. 4 соответственно.
Параметры α0, αр в первом нелинейном корректирующем блоке (23) определяются исходя из анализа эффективности элеронов как органа управления ЛА в боковом канале: как правило α0≈10° соответствует границе максимальной эффективности, а α0≈(20°÷20°) - границе минимальной эффективности.
Величины  во втором нелинейном корректирующем блоке (24) также назначаются для конкретного пилотируемого ЛА и обычно составляют
во втором нелинейном корректирующем блоке (24) также назначаются для конкретного пилотируемого ЛА и обычно составляют

Величина р0 в третьем нелинейном корректирующем блоке (25) соответствует высоте полета конкретного пилотируемого ЛА, на которой достигается предельно допустимая перегрузка nудоп, но не превышается предельно допустимый угол атаки αдоп (пилотирование «по перегрузке»). Величина р1 соответствует высоте полета, когда достигается αдоп, но при этом не превышается nудоп (пилотирование «по углу атаки»).
Предлагаемая система управления работает следующим образом.
Выполнение пространственного маневра, которое характеризуется сочетанием вращения по крену с интенсивным увеличением угла атаки, предполагает отклонение РУС по тангажу и по крену, которое может производиться с малыми временными интервалами в любой последовательности или одновременно, как это имеет место при «диагональной даче» РУС».
Рассмотрим для простоты «диагональную дачу» РУС.
Летчик отклоняет РУС по тангажу «на себя» и по крену. Соответственно, датчики ДПРυ (22) и ДПРЭ (1) замеряют перемещение РУС и полученные значения в виде соответствующих сигналов направляются соответственно во второй нелинейный корректирующий блок (24) и во второй фильтр (5) подавления помех. Далее очищенный от помех фильтром (5) сигнал  поступает во второй масштабирующий блок (13), где преобразуется в соответствующее режиму полета данного ЛА управляющий сигнал угла отклонения элерона, поступающий далее на второй вход первого сумматора (20), а затем на вход рулевого привода элеронов (18). В результате перемещения силового штока привода (18) происходит отклонение элерона, которое инициирует развитие движения крена, характеризующееся угловой скоростью крена ωх, которая замеряется соответствующим датчиком (2). Сигнал ωх с выхода этого датчика поступает на вход первого масштабирующего блока (12), в котором в соответствии с режимом полета ЛА он преобразуется в сигнал заданного угла отклонения элерона, необходимый для создания демпфирования движения крена. Сигнал заданного отклонения элерона поступает далее на первый вход первого сумматора (20). Полученный в этом блоке суммарный сигнал, являющийся результирующим управляющим значением угла отклонения элерона, направляется затем на вход рулевого привода (18), обеспечивая тем самым дальнейшее управление по крену.
поступает во второй масштабирующий блок (13), где преобразуется в соответствующее режиму полета данного ЛА управляющий сигнал угла отклонения элерона, поступающий далее на второй вход первого сумматора (20), а затем на вход рулевого привода элеронов (18). В результате перемещения силового штока привода (18) происходит отклонение элерона, которое инициирует развитие движения крена, характеризующееся угловой скоростью крена ωх, которая замеряется соответствующим датчиком (2). Сигнал ωх с выхода этого датчика поступает на вход первого масштабирующего блока (12), в котором в соответствии с режимом полета ЛА он преобразуется в сигнал заданного угла отклонения элерона, необходимый для создания демпфирования движения крена. Сигнал заданного отклонения элерона поступает далее на первый вход первого сумматора (20). Полученный в этом блоке суммарный сигнал, являющийся результирующим управляющим значением угла отклонения элерона, направляется затем на вход рулевого привода (18), обеспечивая тем самым дальнейшее управление по крену.
В процессе выполнения маневра, при наличии отклонения педалей, их перемещение Хп замеряется датчиком (8), выходной сигнал с которого, очищенный от помех первым фильтром (4), пропускается через седьмой масштабирующий блок (29) и в виде управляющего сигнала - угла отклонения руля направления поступает далее на третий вход второго сумматора (21).
Возникающее после «диагональной дачи» РУС пространственное движение ЛА характеризуется, в том числе и угловой скоростью рыскания ωу, а также боковой перегрузкой nz, величины которых замеряются соответственно датчиками (9) и (10). Сигнал ωу с выхода датчика (9), проходя последовательно через четвертый масштабирующий блок (15) и форсирующий фильтр (7) направляется на четвертый вход второго сумматора (21). Сигнал nz с выхода датчика (10) преобразуется по величине в пятом масштабирующем блоке (16), очищается от помех в третьем фильтре подавления помех (6) и направляется на пятый вход второго сумматора (21).
Сигнал ωх угловой скорости крена с выхода датчика (2) направляется на вход шестого масштабирующего блока (17), где в соответствии с сигналами датчика угла атаки (11) и СВС (3) преобразуется в сигнал, соответствующий заданному углу отклонения руля направления, который подается на второй вход второго сумматора (21).
Сигналы на втором, четвертом и пятом входах второго сумматора (21) соответствуют в сумме углу отклонения руля направления, необходимому для создания демпфирующей обратной связи в канале рыскания. В частности, эта обратная связь образует автомат устойчивости пути (см. Г.С. Бюшгенс, Р.В. Студнев, Аэродинамика самолета. Динамика продольного и бокового движения.: Москва, «Машиностроение», 1979 г., глава 10,  с. 309).
с. 309).
В ходе развития пространственного движения, вслед за появлением угловых скоростей крена и рыскания, развивается угол скольжения, который препятствует нарастанию угловой скорости крена и приводит к ухудшению поперечной управляемости. Для парирования этого негативного явления в СУ предусмотрена дополнительная адаптивная перекрестная связь между каналами крена и рыскания, действующая по цепи ДПРЭ → второй фильтр подавления помех (5) → торой масштабирующий блок (13) → последовательно соединенные блоки перемножения (26), (27), (28) → шестой вход сумматора (20) → рулевой привод  (19). Общий коэффициент усиления адаптивной перекрестной связи корректируется с помощью первого, второго и третьего нелинейных корректирующих блоков (23), (24) и (25).
(19). Общий коэффициент усиления адаптивной перекрестной связи корректируется с помощью первого, второго и третьего нелинейных корректирующих блоков (23), (24) и (25).
Сигнал  с ДПРЭ (1), очищенный вторым фильтром (5) от помех, поступает на вход третьего масштабирующего блока (14). В этом блоке в зависимости от замеренного датчиком (11) угла атаки происходит преобразование значения
с ДПРЭ (1), очищенный вторым фильтром (5) от помех, поступает на вход третьего масштабирующего блока (14). В этом блоке в зависимости от замеренного датчиком (11) угла атаки происходит преобразование значения  в сигнал, который, поступая на первый вход второго сумматора (21) и затем на вход рулевого привода (19), формирует соответствующее отклонение руля направления, парирующее развитие компоненты угла скольжения, обусловленной изменением угловой скорости крена на данном текущем значении угла атаки
в сигнал, который, поступая на первый вход второго сумматора (21) и затем на вход рулевого привода (19), формирует соответствующее отклонение руля направления, парирующее развитие компоненты угла скольжения, обусловленной изменением угловой скорости крена на данном текущем значении угла атаки
При выполнении пространственного маневра происходит быстрое изменение угловой скорости тангажа и угла атаки ЛА. Рассмотрев соотношение (36.8) на стр. 312 книги Г.С. Бюшгенс, Р.В. Студнев, Аэродинамика самолета. Динамика продольного и бокового движения.: Москва, «Машиностроение», 1979 г., можно убедиться, что передаточное число, с помощью которого формируется сигнал для первого входа сумматора (21), не учитывает влияние указанного процесса на развитие угла скольжения. В действительности, согласно формулам (4.2) на с. 39 этой же книги, существенное влияние на изменение компонент углового ускорения dωx/dt и dωу/dt оказывают инерционные составляющие, пропорциональные угловой скорости тангажа, которые и приводят к изменению угла скольжения относительно величин, развивающихся при малом изменении исходного положения в продольной плоскости в процессе выполнения маневра.
Дополнительная перекрестная связь в структуре заявляемой СУ между каналом крена и рыскания позволяет учесть отмеченную особенность пространственного движения, обеспечивая тем самым адаптивность указанной перекрестной связи к особенностям продольной компоненты полного движения. Сигнал с выхода второго масштабирующего блока (13), пропорциональный заданному отклонению РУС по крену  и формирующий заданный угол отклонения элеронов, поступает на первый вход первого блока перемножения сигналов (26). Текущее значение угла атаки, замеренное датчиком (11), поступает на вход первого корректирующего блока (23). Передаточное число блока (23) учитывает изменение с ростом угла атаки эффективности элеронов, как органа управления ЛА. Так, на углах атаки менее α0, где элероны имеют максимальную эффективность при управлении в канале крена, передаточное число блока (23) принимает максимальное значение. Напротив, на углах атаки более αр, вблизи максимально допустимых значений углов атаки, где эффективность элеронов мала, а избыточное отклонение руля направления может быть несоразмерно запасу боковой устойчивости и приводить к сваливанию ЛА, передаточное число уменьшается до нуля. Сигнал с выхода блока (23) поступает на второй вход первого блока перемножения сигналов (26), с помощью которого осуществляется первая коррекция адаптивной перекрестной связи сигнала с выхода блока (13) по углу атаки ЛА.
и формирующий заданный угол отклонения элеронов, поступает на первый вход первого блока перемножения сигналов (26). Текущее значение угла атаки, замеренное датчиком (11), поступает на вход первого корректирующего блока (23). Передаточное число блока (23) учитывает изменение с ростом угла атаки эффективности элеронов, как органа управления ЛА. Так, на углах атаки менее α0, где элероны имеют максимальную эффективность при управлении в канале крена, передаточное число блока (23) принимает максимальное значение. Напротив, на углах атаки более αр, вблизи максимально допустимых значений углов атаки, где эффективность элеронов мала, а избыточное отклонение руля направления может быть несоразмерно запасу боковой устойчивости и приводить к сваливанию ЛА, передаточное число уменьшается до нуля. Сигнал с выхода блока (23) поступает на второй вход первого блока перемножения сигналов (26), с помощью которого осуществляется первая коррекция адаптивной перекрестной связи сигнала с выхода блока (13) по углу атаки ЛА.
Сигнал перемещения ручки управления по тангажу  замеренный датчиком (22), поступает на вход второго нелинейного корректирующего блока (24). С его помощью за счет подключения выхода блока (24) к второму входу блока перемножения (27) производится вторая коррекция сигнала с выхода второго масштабирующего блока (13) в зависимости от величины
замеренный датчиком (22), поступает на вход второго нелинейного корректирующего блока (24). С его помощью за счет подключения выхода блока (24) к второму входу блока перемножения (27) производится вторая коррекция сигнала с выхода второго масштабирующего блока (13) в зависимости от величины  При
При  передаточное число блока (24)
передаточное число блока (24)  за счет чего в диапазоне значений отклонений ручки по тангажу, соответствующих режимам, близким к горизонтальному полету и составляющим (1/4÷1/3) от полного хода РУС «на себя», адаптивная перекрестная связь не используется из-за своей избыточности. Напротив, при максимальных отклонениях РУС по тангажу «на себя» в диапазоне
за счет чего в диапазоне значений отклонений ручки по тангажу, соответствующих режимам, близким к горизонтальному полету и составляющим (1/4÷1/3) от полного хода РУС «на себя», адаптивная перекрестная связь не используется из-за своей избыточности. Напротив, при максимальных отклонениях РУС по тангажу «на себя» в диапазоне  , когда такое перемещение вызывает интенсивное продольное движение, являющееся частью пространственного движения, коэффициент усиления блока (24)
, когда такое перемещение вызывает интенсивное продольное движение, являющееся частью пространственного движения, коэффициент усиления блока (24)  принимает свое максимальное значение. Величина порогового значения
принимает свое максимальное значение. Величина порогового значения  составляет (85÷90%) от полного хода РУС «на себя». Для промежуточных значений перемещения РУС по тангажу (
составляет (85÷90%) от полного хода РУС «на себя». Для промежуточных значений перемещения РУС по тангажу ( ) коэффициент усиления
) коэффициент усиления  в блоке (24) принимает соответствующие (полученные в результате математического моделирования движения ЛА) значения, соразмерные параметрам движения данного конкретного ЛА.
в блоке (24) принимает соответствующие (полученные в результате математического моделирования движения ЛА) значения, соразмерные параметрам движения данного конкретного ЛА.
Блок (25) предназначен для третьей коррекции адаптивной перекрестной связи по величине статического давления Рст (по высоте) за счет подключения сигнала с его выхода к второму входу третьего блока перемножения сигналов (28). При величинах Рст≥P1, соответствующих высотам полета, где в силу наличия ограничения по нормальной перегрузке невозможно достигать зоны максимально допустимых углов атаки, коррекция перекрестной связи не производится. Напротив, в зоне высот полета, соответствующих значениям Рст≤Р0, где возможно достижение максимально допустимых углов атаки, коррекция коэффициента Kp в блоке (25) позволяет получить полное значение передаточного коэффициента адаптивной перекрестной связи. Наличие промежуточной зоны коррекции по Рст (высоте) в блоке (25) позволяет осуществлять плавный ввод в действие дополнительной цепи по режимам полета.
Сигнал с выхода третьего блока перемножения (28), представляющий собой корректируемый адаптивной перекрестной связью угол отклонения руля направления, подается на шестой вход второго сумматора (21) и далее через него на вход привода руля направления (19), посредством которого руль отклоняется в соответствии с дополнительно образованным законом управления.
На фиг. 5, в качестве примера, представлены графики изменения параметров движения пилотируемого ЛА в реально выполненном пространственном маневре при одновременном отклонении РУС на полный ход по крену и «на себя» по тангажу («диагональная дача») для двух случаев:
- с использованием в СУ адаптивной перекрестной связи между каналом крена и рыскания;
- без использования в СУ этой перекрестной связи.
Из представленных на фиг. 5 графиков видно, что выполнение пространственного маневра ЛА без адаптивной перекрестной связи в СУ сопровождается развитием существенно больших углов скольжения и большей потерей угловой скорости крена, чем на этом же ЛА с СУ, содержащей предлагаемую адаптивную перекрестную связь.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КРЕНА | 2020 |
|
RU2753776C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В БОКОВОМ ДВИЖЕНИИ | 2017 |
|
RU2671063C1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ДВУХКИЛЕВОГО ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КУРСА | 2020 |
|
RU2765837C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КУРСА | 2021 |
|
RU2768310C1 |
| ОГРАНИЧИТЕЛЬ ПРЕДЕЛЬНЫХ РЕЖИМОВ ПОЛЕТА МАНЕВРЕННОГО САМОЛЕТА | 2019 |
|
RU2719711C1 |
| ОГРАНИЧИТЕЛЬ ПРЕДЕЛЬНЫХ РЕЖИМОВ ПОЛЕТА МАНЕВРЕННОГО САМОЛЕТА ПО ПЕРЕГРУЗКЕ | 2019 |
|
RU2711040C1 |
| УСТРОЙСТВО КООРДИНИРОВАННОГО РЕГУЛИРОВАНИЯ УГЛОВОГО БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU2047888C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И КОМПЛЕКСНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327602C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В ПРОДОЛЬНОМ КАНАЛЕ ПРИ ДОЗАПРАВКЕ В ВОЗДУХЕ | 2022 |
|
RU2833735C2 |
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕГКОГО САМОЛЕТА | 2000 |
|
RU2176812C1 |
Система управления пилотируемого летательного аппарата (ЛА) с адаптивной перекрестной связью содержит датчик положения ручки управления самолетом (РУС) по крену, датчик угловой скорости крена, систему воздушных сигналов, три фильтра подавления помех, форсирующий фильтр, датчик положения педалей, датчик угловой скорости по угловой скорости рыскания, датчик линейных ускорений в боковой плоскости движения самолета, датчик углов атаки и скольжения, семь масштабирующих блоков, рулевые приводы элеронов и руля направления, два сумматора, датчик положения РУС по тангажу, три нелинейных корректирующих блока, три блока перемножения сигналов, соединенные определенным образом. Обеспечивается сохранение удовлетворительной (соответствующей нормативным требованиям) управляемости пилотируемого ЛА по крену во всем диапазоне допустимых углов атаки при выполнении произвольных пространственных маневров. 3 з.п. ф-лы, 5 ил.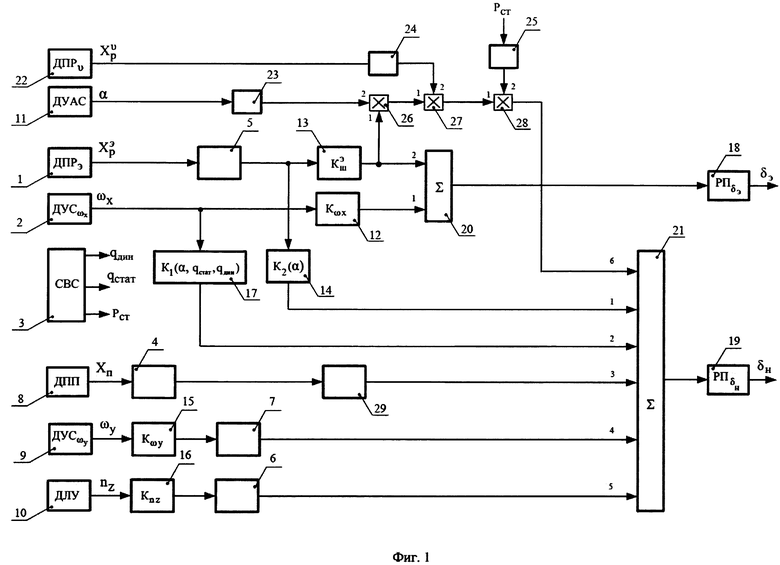
1. Система управления пилотируемого летательного аппарата (ЛА) с адаптивной перекрестной связью, содержащая датчик положения ручки управления самолетом (РУС) по крену (ДПРЭ), датчик угловой скорости крена ωХ, систему воздушных сигналов (СВС), формирующую сигналы динамического (qдин) и статического (qстат) скоростного напора и статического давления (Рст), первый, второй и третий фильтры подавления помех, вход второго фильтра подавления помех (5) соединен с выходом датчика (1) положения РУС по крену (ДПРЭ), форсирующий фильтр, датчик положения педалей (ДПП), выход которого соединен с входом первого фильтра, датчик угловой скорости рыскания ωу, датчик линейных ускорений (ДЛУ) в боковой плоскости, датчик углов атаки и скольжения (ДУАС), первый, второй, третий, четвертый, пятый и шестой масштабирующие блоки, рулевой привод элеронов, рулевой привод руля направления, первый сумматор, первый и второй входы которого соединены соответственно с выходами первого и второго масштабирующих блоков, а выход подключен к входу рулевого привода элеронов, второй сумматор, выход которого подключен к входу рулевого привода руля направления, входы первого масштабирующего блока и шестого масштабирующего блока соединены с выходом датчика угловой скорости крена, входы второго масштабирующего блока и третьего масштабирующего блока подключены к выходу второго фильтра подавления помех, вход и выход четвертого масштабирующего блока соединены соответственно с выходом датчика угловой скорости рыскания и с входом форсирующего фильтра, вход и выход пятого масштабирующего блока подключены соответственно к выходу датчика линейных ускорений и к входу третьего фильтра подавления помех, первый, второй, четвертый и пятый входы второго сумматора соединены соответственно с выходами третьего масштабирующего блока, шестого масштабирующего блока, форсирующего фильтра и третьего фильтра подавления помех, отличающаяся тем, что СУ использует имеющийся на ЛА датчик положения РУС по тангажу (ДПРυ), дополнительно содержит первый, второй и третий нелинейные корректирующие блоки, первый, второй и третий блоки перемножения, седьмой масштабирующий блок (29), вход которого соединен с выходом первого фильтра подавления помех (4), а выход - с третьим входом второго сумматора, вход первого нелинейного корректирующего блока (23) соединен с выходом ДУАС, вход второго нелинейного корректирующего блока подключен к выходу датчика положения РУС по тангажу (ДПРυ), вход третьего нелинейного корректирующего блока соединен с выходом Рст СВС, к первому и второму входам первого блока перемножения подключены соответственно выходы второго масштабирующего блока и первого нелинейного корректирующего блока, первый и второй входы второго блока перемножения соединены соответственно с выходами первого блока перемножения и второго нелинейного корректирующего блока, первый и второй входы третьего блока перемножения подключены соответственно с выходом второго блока перемножения и третьего нелинейного корректирующего блока, второй сумматор снабжен шестым входом, к которому подключен выход третьего блока перемножения.
2. Система управления пилотируемого летательного аппарата с адаптивной перекрестной связью по п. 1, отличающаяся тем, что первый нелинейный корректирующий блок представляет собой нелинейный коэффициент Kα, величина которого определяется текущим значением сигнала угла атаки α самолета с выхода ДУАС:
Kα=Kα1, при α≤α0;
Kα=0, при α≥αp;
Kα=ƒ(α), при α0≤α≤αр,
где зависимость ƒ(α) определяется конкретным типом пилотируемого летательного аппарата.
3. Система управления пилотируемого летательного аппарата с адаптивной перекрестной связью по п. 1, отличающаяся тем, что второй нелинейный корректирующий блок представляет собой нелинейный коэффициент  величина которого определяется текущим значением сигнала
величина которого определяется текущим значением сигнала  с выхода датчика положения ручки управления самолетом по тангажу (ДПРυ):
с выхода датчика положения ручки управления самолетом по тангажу (ДПРυ):



где зависимость  определяется конкретным типом пилотируемого летательного аппарата.
определяется конкретным типом пилотируемого летательного аппарата.
4. Система управления пилотируемого летательного аппарата с адаптивной перекрестной связью по п. 1, отличающаяся тем, что третий нелинейный корректирующий блок представляет собой нелинейный коэффициент Kp, величина которого определяется текущим значением сигнала Рст с выхода СВС:
Kp=1, при Рст≤Р0;
Kp=0, при Рст≥Р1;
Kp=ƒ(Рст), при P0≤Pcт≤Р1,
где зависимость ƒ(Рст) определяется конкретным типом пилотируемого летательного аппарата.
| МОДЕРНИЗИРОВАННОЕ АДАПТИВНОЕ УСТРОЙСТВО КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2014 |
|
RU2554515C1 |
| RU 2015149473 A, 19.05.2017 | |||
| СПОСОБ ФОРМИРОВАНИЯ АДАПТИВНОГО СИГНАЛА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ УГЛОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2569580C2 |
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПО КРЕНУ | 2014 |
|
RU2600025C2 |
| DE 102016117634 A1, 22.03.2018 | |||
| US 0004964599 A1, 23.10.1990. | |||

