Изобретение относится к системам управления (СУ) двухкилевого пилотируемого летательного аппарата (ЛА) в канале курса.
Основной особенностью управления ЛА (в том числе двухкилевого) в канале курса, приводящей к ухудшению управляемости, является снижение эффективности органов управления на больших скоростных напорах из-за упругости конструкции ЛА.
Способ управления ЛА в канале курса, реализованный в известных системах управления (Г.С. Бюшгенс. Аэродинамика, устойчивость и управляемость сверхзвуковых самолетов. Москва. «Наука. Физматлит», 1998 г., с. 811, с. 650÷652; Г.С. Бюшгенс, Р.В. Студнев. Аэродинамика самолета. Динамика продольного и бокового движения. Москва. «Машиностроение», 1979 г., с. 352, с. 315, рис. 36.6 б, с. 308, рис. 36.1; Гуськов Ю.П., Загайнов Г.И. Управление полетом самолетов: Учебник для авиационных вузов. - М.: Машиностроение, 1980, 213. с., ил., с. 117÷119), основывается на использовании педалей, системы дистанционного управления (СДУ) с тем или иным законом управления, на вход которой поступает сигнал от педалей, рулевых приводов (РП), на входы которых поступают сигналы с выходов СДУ, килей, расположенных на них рулей направления (РН) и механической проводки (МП), отклоняющей РН от перемещения штоков РП.
В указанных СУ не принимаются во внимание изменения передаточного числа проводки управления за приводами органов управления (рулей направления) в канале курса. На больших скоростных напорах наблюдается заметная деформация конструкции вертикального оперения (ВО) ЛА, в том числе и руля направления на консоли ВО. Этот эффект обычно учитывается в расчетах с помощью так называемых коэффициентов влияния упругости конструкции ЛА на соответствующие аэродинамические характеристики. Указанные коэффициенты влияния используются, в том числе, при выполнении расчетов и моделирования для определения передаточных чисел СУ в канале курса. Однако в применяемой методике расчетов параметров СУ не учитывается изменение передаточного числа в механической проводке управления (от штока рулевого привода до руля направления). Однако деформация конструкции ВО приводит к изменению положения размещенного внутри ВО рулевого привода и системы тяг и качалок между этим приводом и органом управления (рулем направления) по сравнению с теоретическим положением. Подобное перемещение частей МП в пространстве вызывает изменение передаточного числа от привода через проводку к органам управления в канале курса. При этом фактический угол отклонения органа управления может отличаться от заданного угла, задаваемого сигналом на входе в привод, более чем в два раза. Это явление приводит к дополнительному уменьшению управляемости ЛА, которое не учитывается в известных СУ.
Заявляемый способ управления двухкилевым пилотируемым ЛА в канале курса заключается в использовании педалей, СДУ, в состав которой входит вычислительное устройство (ВУ) и на вход которой поступает сигнал от педалей, двух РП, на входы которых поступают сигналы с выходов СДУ, двух килей и расположенных на них двух рулей направления, двух механических проводок, отклоняющих рули направления от перемещения штоков РП, отличающийся тем, что имеющее место изменение коэффициента передачи от перемещения штоков РП до углового отклонения органов управления ЛА, вызванное упругими деформациями конструкции килей, составных узлов МП и самих РН при больших скоростных напорах, компенсируется соответствующим изменением коэффициента передачи сигналов с выходов СДУ до входов в РП таким образом, что обеспечивается заданное (расчетное) значение общего коэффициента передачи сигнала от педалей через СДУ, РП и МП до отклонения органов управления ЛА.
Техническим результатом, достигаемым в заявляемом способе управления двухкилевым пилотируемым ЛА в канале курса, является сохранение удовлетворяющей нормативным требованиям и соответствующей теоретическим значениям управляемости пилотируемого ЛА в канале курса во всем диапазоне допустимых значений скоростного напора.
Заявленный результат обеспечивается тем, что имеющее место изменение коэффициента передачи от перемещения штока РП до углового отклонения органов управления, вызванное упругими деформациями конструкции килей, составных узлов МП и самих РН при больших скоростях полета, компенсируется соответствующим изменением коэффициента передачи сигналов с выходов ВУ до входов в РП таким образом, что обеспечивается заданное (расчетное) значение общего коэффициента передачи сигнала от педалей через СДУ, РП и МП до отклонения органов управления, полученное без учета упругих деформаций.
СУ, использующая заявляемый способ управления двухкилевым пилотируемым ЛА в канале курса, содержит систему воздушных сигналов (СВС), формирующую сигналы числа М, статического Рст и динамического Рдин давления, датчик перемещения педалей, датчик перемещения ручки управления по тангажу, датчики угла атаки, угловой скорости крена, угловой скорости рыскания, угла скольжения и боковой перегрузки, СДУ, включающую в себя ВУ, входы которого соединены с выходами СВС по сигналам числа М, статического Рст и динамического Рдин давления и с выходами датчиков перемещения педалей, перемещения ручки управления по тангажу, угла атаки, угловой скорости крена, угловой скорости рыскания, угла скольжения и боковой перегрузки, рулевые приводы левый и правый, левую и правую механические проводки, входы которых соединены с левым и правым рулевым приводом соответственно, рули направления левый и правый, подключенные к выходам левой и правой механических проводок соответственно. СДУ дополнительно содержит корректирующий блок, первый вход которого подключен к выходу ВУ, второй и третий входы соединены соответственно с выходами СВС по сигналам соответственно Рст и числа М, а выходы которого, являющиеся выходами СДУ, подключены к входам левого и правого рулевых приводов. Корректирующий блок содержит первый и второй нелинейные блоки, на входы которых поступают сигналы статического давления Рст и числа М с выходов СВС, первый и второй сумматоры, первые входы которых соединены с выходом второго нелинейного блока, а выходы которых являются выходами корректирующего блока, блок перемножения, первый вход которого, являющийся входом корректирующего блока, соединен с выходом ВУ, второй вход блока перемножения подключен к выходу первого нелинейного блока, а выход блока перемножения подключен к вторым входам первого и второго сумматоров.
Сущность изобретения поясняется следующими графическими изображениями:
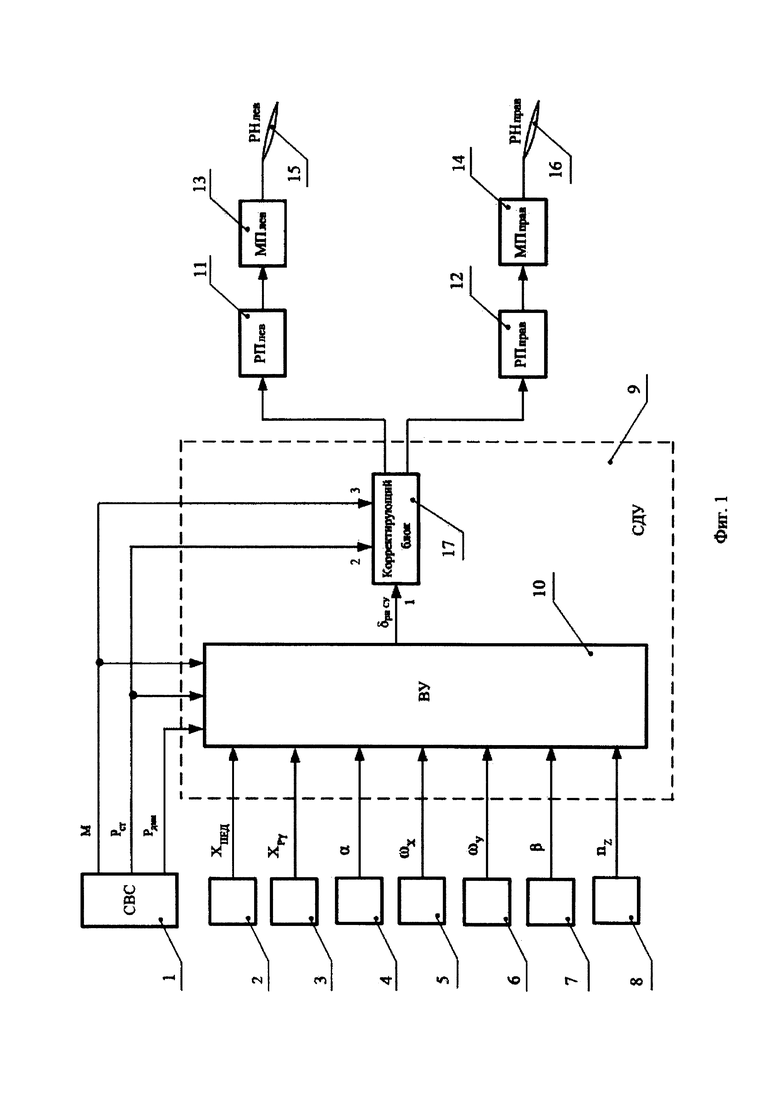
на фиг. 1 изображена блок-схема системы управления двухкилевого пилотируемого ЛА в канале курса;
на фиг. 2 изображена структура корректирующего блока СУ;
на фиг. 3 приведены графики переходных процессов в СУ.
На фиг. 1÷3 использованы следующие обозначения:
1 - система воздушных сигналов (СВС);
2 - датчик перемещения педалей;
3 - датчик перемещения РУС по тангажу;
4 - датчик угла атаки;
5 - датчик угловой скорости крена;
6 - датчик угловой скорости рыскания;
7 - датчик угла скольжения;
8 - датчик перегрузки в боковом канале;
9 - система дистанционного управления;
10 - вычислительное устройство (ВУ) СДУ;
11, 12 - рулевые приводы левый РПлев и правый РПправ;
18, 19 - первый и второй нелинейные блоки;
13, 14 - механическая проводка левого МПлев и правого МПправ руля направления;
15, 16 - рули направления левый РНлев и правый РНправ;
17 - корректирующий блок;
18, 19 - первый и второй нелинейные блоки;
20, 21 - первый и второй сумматоры;
22 - блок перемножения сигналов;
М - число Маха;
Рст, Рдин - статическое и динамическое давление;
ХПЕД - сигнал перемещения педалей;
ХРγ - сигнал с выхода датчика перемещения РУС по крену;
α - сигнал с выхода датчика угла атаки;
ωХ, ωУ - сигналы угловых скоростей крена и рыскания;
β - сигнал угла скольжения;
nZ - сигнал боковой перегрузки;
δВУ - сигнал с выхода ВУ;
 - сигнал на входе в левый рулевой привод РПлев;
- сигнал на входе в левый рулевой привод РПлев;
 - сигнал на входе в правый рулевой привод
- сигнал на входе в правый рулевой привод 
К - коэффициент передачи первого нелинейного блока;
 - дополнительный корректирующий сигнал отклонения рулей направления;
- дополнительный корректирующий сигнал отклонения рулей направления;
δрнф.исх - фактическое отклонение руля высоты в реальном полете с исходной СУ;
δрнф.мод - фактическое отклонение руля высоты в реальном полете с модифицированной СУ;
δрншт.исх - фактическое отклонение штока рулевого привода в реальном полете с исходной СУ;
δрншт.мод - фактическое отклонение штока рулевого привода в реальном полете с модифицированной СУ;
nz.исх - боковая перегрузка с исходной СУ в реальном полете;
nz.мод - боковая перегрузка с модифицированной СУ в реальном полете.
СУ содержит систему воздушных сигналов (СВС) 1, формирующую сигналы числа М, статического Рст и динамического Pдин давления, датчик 2 перемещения педалей, датчик 3 перемещения ручки управления по тангажу, датчики угла атаки 4, угловой скорости крена 5, угловой скорости рыскания 6, угла скольжения 7 и боковой перегрузки 8, СДУ 9, включающую в себя ВУ 10, входы которого соединены с выходами СВС 1 и с выходами датчиков 2, 3, 4, 5, 6, 7 и 8, рулевые приводы левый 11 и правый 12, механические системы левого руля направления 13 и правого руля направления 14, рули направления левый 15 и правый 16. СДУ дополнительно содержит корректирующий блок 17, первый вход которого подключен к выходу ВУ 10, второй и третий входы соединены соответственно с выходами СВС 1 по сигналам соответственно Рст и числа М, а выход которого, являющийся выходом СДУ 9, подключен к входам левого и правого рулевых приводов 11 и 12. ВУ 10 формирует закон управления рулями направления с учетом перекрестных связей в продольном и боковом движениях ЛА. Структура ВУ формируется для каждого ЛА индивидуально, например, так, как представлено на рис. 36.1 в книге Г.С. Бюшгенс, Р.В. Студнев. Аэродинамика самолета. Динамика продольного и бокового движения. Москва. «Машиностроение», 1979 г., с. 308.
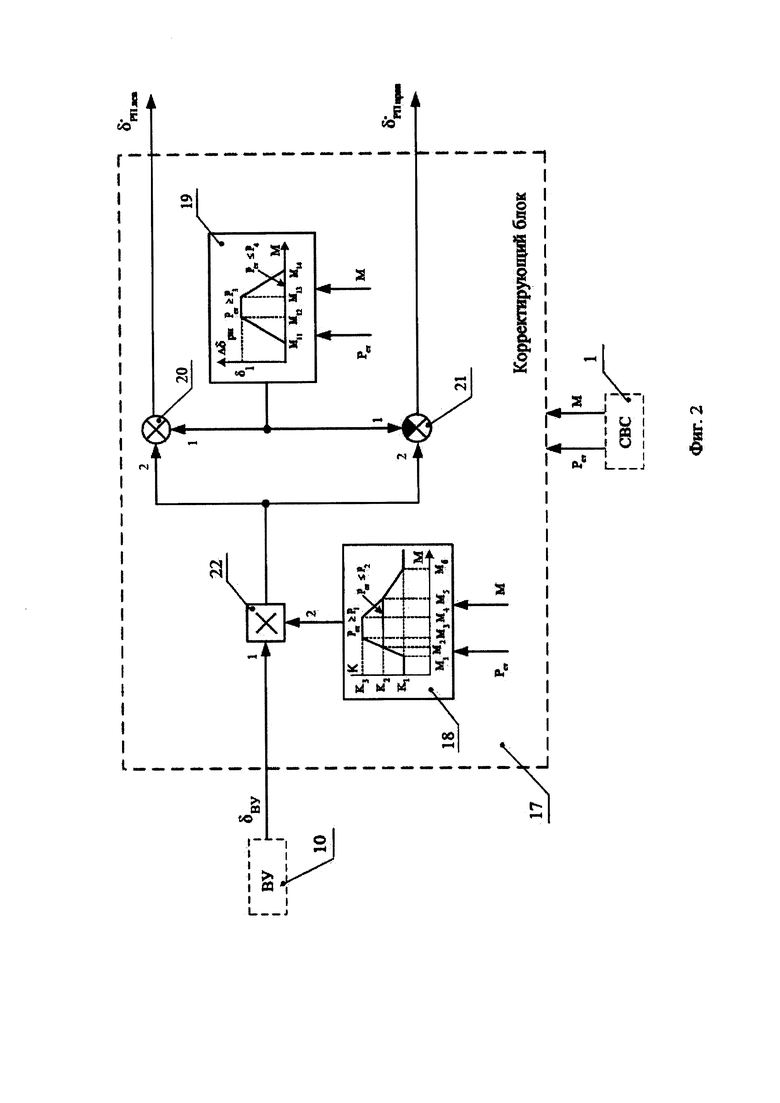
В состав корректирующего блока 17 входят первый 18 и второй 19 нелинейные блоки, на входы которых поступают сигналы статического давления Рст и числа М с выхода СВС 1, первый 20 и второй 21 сумматоры, первые входы которых соединены с выходом второго нелинейного блока 19, а выходы которых являются выходами корректирующего блока, блок перемножения 22, первый вход которого, являющийся входом корректирующего блока, соединен с выходом ВУ 10, второй вход которого подключен к выходу первого нелинейного блока 18, а выход блока перемножения подключен к вторым входам первого 20 и второго 21 сумматоров. Структура нелинейных блоков 18 и 19 определяется конкретным типом ЛА, вариант их реализации приведен на фиг. 2.
Положительный эффект достигается за счет введения в СДУ 9 дополнительного передаточного коэффициента, формируемого в корректирующем блоке 17, с помощью которого учитывается влияние описанного выше перемещения механической части СУ на величину фактического угла отклонения органа управления. Этот дополнительный передаточный коэффициент позволяет сформировать на входе в привод сигнал, который дает возможность получить угол отклонения рулей направления, соответствующий углу отклонения, необходимому для реализации управляемости, заданной алгоритмом СДУ на выходе ВУ в канале курса.
Описанное перемещение механической проводки СУ в пространстве обусловлено аэродинамическим нагружением консоли ВО и органа управления, размещенного на ВО. Аэродинамическое нагружение двухкилевого ВО характеризуется совокупностью симметричной и несимметричной аэродинамической нагрузки. Симметричная составляющая аэродинамической нагрузки на консоль двухкилевого ВО обусловлена воздействием обтекания крыла на ВО и зависит от режима полета. Несимметричная составляющая аэродинамической нагрузки обусловлена маневрированием ЛА и зависит как от режима полета, так и от величины кинематических параметров движения (боковая перегрузка, угол отклонения органа управления в канале курса и т.д.). Соответственно фактический угол отклонения органа управления в канале курса - δрн.ф можно представить в виде:

где:
q - скоростной напор;
δpн.0(q, рст) - составляющая фактического угла отклонения органа управления в канале курса, зависящая от величины симметричной составляющей аэродинамической нагрузки на консоль двухкилевого ВО и представляющая собой функцию скоростного напора q и статического давления (высоты полета) рст;
δpн.(nz, … q, рст) - составляющая фактического угла отклонения органа управления в канале курса, зависящая от величины несимметричной составляющей аэродинамической нагрузки на консоль двухкилевого ВО и представляющая собой функцию скоростного напора q и статического давления (высоты полета) рст, а также кинематических параметров движения - боковой перегрузки nz и т.д.
Величину δpн.(nz, … q, рст) можно представить в виде функции заданного алгоритмом СДУ угла отклонения органа управления в канале курса δрн СУ:

где K1 (q, рст) - коэффициент пропорциональности, зависящий от параметров режима полета q и рст.
Таким образом, задача предлагаемой СУ состоит в том, чтобы при наличии управляющего сигнала δрн СУ, который необходим для управления ЛА в канале курса согласно теоретической модели ЛА, сформировать сигнал δрн.пр на входе в приводы органа управления в канале курса, который с учетом фактической деформированной конфигурации ЛА обеспечит управляемость, заданную величиной δрн СУ. Следовательно, соотношение (1) в этом случае примет вид:

Из соотношения (3) можно определить величину сигнала, которую надо подать на вход приводов органов управления в канале курса, чтобы получить управляемость, соответствующую углу отклонения δрн СУ:

где  а
а 
Передаточный коэффициент K2(q, рст) формируется в корректирующем блоке 17, представленном на фиг. 2. Структура нелинейных блоков 18 и 19, входящих в корректирующий блок, определяется конкретным типом ЛА. Вариант их реализации для маневренного самолета приведен на фиг. 2.
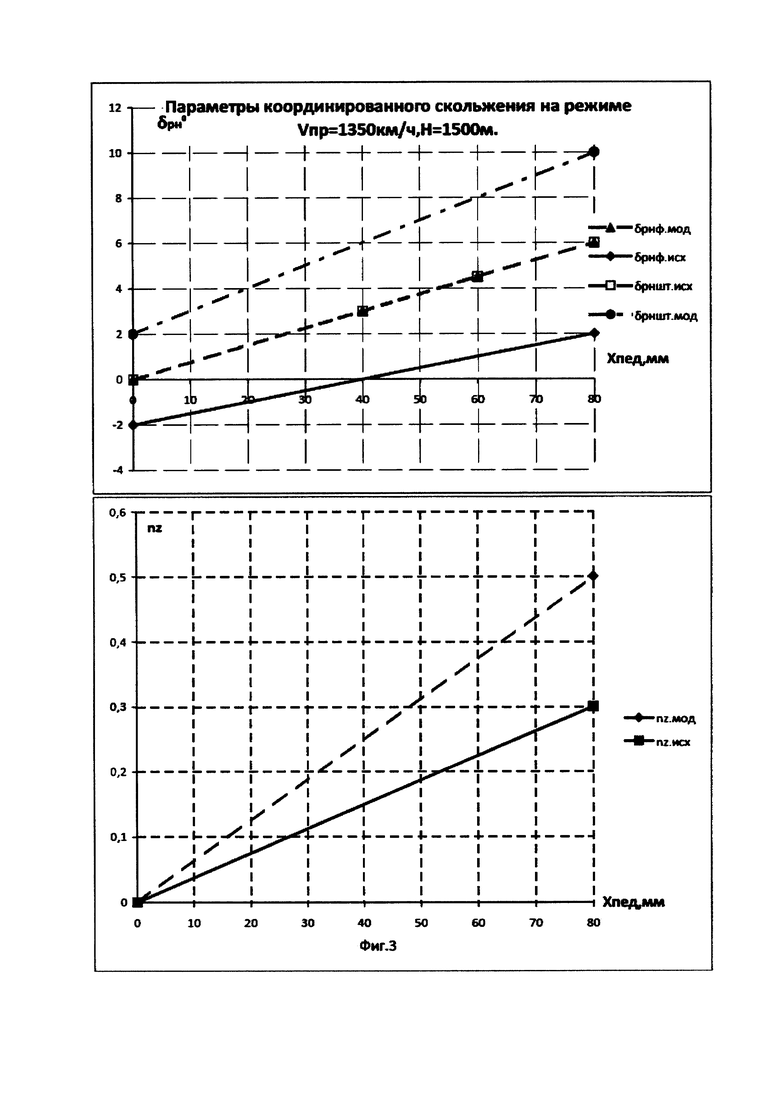
На рис. 3 представлены результаты летных испытаний самолета с исходной системой управления и с предлагаемой (модифицированной) системой управления, выполненной при доработке самолета. На рисунке видно, что для выполнения координированного скольжения при перемещении штока привода руля направления для отклонения руля направления на угол δрн-штисх на самолете с исходной системой управления фактическое отклонение руля направления происходит на значительно меньший угол δрн ф исх. В аналогичной ситуации в модифицированной системе управления при перемещении штока привода руля направления для отклонения руля направления на угол δрншт мод происходит фактическое отклонение руля направления на угол δрн ф мод. Причем выполняется соотношение δрн ф мод=δрншт исх. Таким образом, как следует из представленных графиков, предлагаемая СУ выполняет отклонение руля направления на больший угол, обеспечивающий расчетную управляемость в канале рыскания, лучшую, чем в исходной СУ, что следует из реализации повышенных значений боковой перегрузки nzмод вместо nzисх.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КУРСА | 2021 |
|
RU2768310C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА С АДАПТИВНОЙ ПЕРЕКРЕСТНОЙ СВЯЗЬЮ | 2019 |
|
RU2736400C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КРЕНА | 2020 |
|
RU2753776C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В БОКОВОМ ДВИЖЕНИИ | 2017 |
|
RU2671063C1 |
| СИСТЕМА ПРОДОЛЬНОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2021 |
|
RU2769452C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И КОМПЛЕКСНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327602C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
| ЛЕГКИЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2003 |
|
RU2235044C1 |
| ОГРАНИЧИТЕЛЬ ПРЕДЕЛЬНЫХ РЕЖИМОВ ПОЛЕТА МАНЕВРЕННОГО САМОЛЕТА ПО ПЕРЕГРУЗКЕ | 2019 |
|
RU2711040C1 |
| Способ формирования отказоустойчивой комплексной системы управления (КСУ) и отказоустойчивая КСУ | 2016 |
|
RU2629454C2 |
Группа изобретений относится к способу и системе дистанционного управления двухкилевым пилотируемым летательным аппаратом (ЛА). Для управления ЛА в канале курса используют педали, систему дистанционного управления (СДУ), два рублевых привода, два киля с расположенными на них рулями направления, две механические проводки для отклонения рулей направления, при этом для компенсации последствий, вызванных упругими деформациями конструкций килей, изменяют соответствующим образом коэффициент передачи сигналов с выходов СДУ до входов в рулевые приводы. СДУ содержит систему воздушных сигналов, датчик перемещения педалей, датчик перемещения ручки управления по крену, датчики угла атаки, угловой скорости крена, угловой скорости рыскания, угла скольжения и боковой перегрузки, вычислительное устройство, рулевые приводы левый и правый, механические проводки для перемещения органов управления ЛА в канале курса, рули направления левый и правый, корректирующий блок, соединенные определенным образом. Обеспечивается повышение управляемости пилотируемого ЛА в канале курса во всем диапазоне допустимых значений скоростного напора. 2 н. и 1 з.п. ф-лы, 3 ил.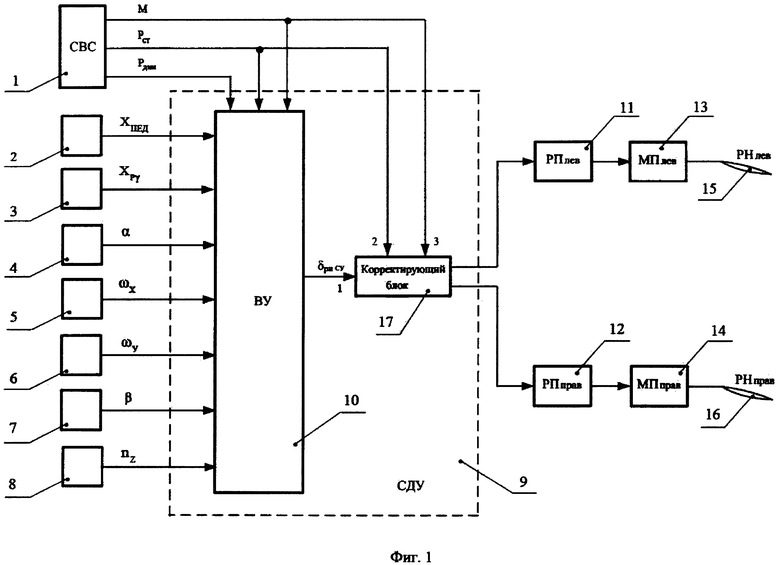
1. Способ управления двухкилевым пилотируемым летательным аппаратом (ЛА) в канале курса, заключающийся в использовании педалей, системы дистанционного управления (СДУ), на вход которой поступает сигнал от педалей, двух рулевых приводов, на входы которых поступают сигналы с выходов СДУ, двух килей и расположенных на них рулей направления, двух механических проводок, отклоняющих рули направления от перемещения штоков рулевых приводов, отличающийся тем, что имеющее место изменение коэффициента передачи от перемещения штоков рулевых приводов до углового отклонения органов управления ЛА, вызванное упругими деформациями конструкции килей, составных узлов механических проводок и самих рулей направления при больших скоростных напорах, компенсируется соответствующим изменением коэффициента передачи сигналов с выходов СДУ до входов в рулевые приводы таким образом, что обеспечивается заданное (расчетное) значение общего коэффициента передачи сигнала от педалей через СДУ, рулевые приводы и механические проводки до отклонения органов управления ЛА.
2. Система дистанционного управления двухкилевым пилотируемым летательным аппаратом в канале курса, реализующая способ управления по п. 1, содержащая систему воздушных сигналов, формирующую сигналы числа М, статического Рст и динамического Рдин давления, датчик перемещения педалей, датчик перемещения ручки управления по крену, датчики угла атаки, угловой скорости крена, угловой скорости рыскания, угла скольжения и боковой перегрузки, СДУ, включающую в себя вычислительное устройство, входы которого соединены с выходами системы воздушных сигналов (СВС) по сигналам числа М, статического Рст и динамического Рдин давления, перемещения педалей, перемещения ручки управления по крену, угла атаки, угловой скорости крена, угловой скорости рыскания, угла скольжения и боковой перегрузки, рулевые приводы левый и правый, механические проводки для перемещения органов управления ЛА в канале курса, рули направления левый и правый, при этом СДУ дополнительно содержит корректирующий блок, первый вход которого подключен к выходу вычислительного устройства, второй и третий входы соединены соответственно с выходами СВС по сигналам соответственно Рст и числа М, а выход которого, являющийся выходом СДУ, подключен к входам левого и правого рулевых приводов.
3. Система дистанционного управления двухкилевым пилотируемым летательным аппаратом в канале курса по п. 2, отличающаяся тем, что корректирующий блок, содержащий первый и второй нелинейные блоки, на входы которых поступают сигналы статического давления Рст и числа М с выхода СВС, первый и второй сумматоры, первые входы которых соединены с выходом второго нелинейного блока, а выходы которых являются выходами корректирующего блока, блок перемножения, первый вход которого, являющийся входом корректирующего блока, соединен с выходом вычислительного устройства, второй вход блока перемножения подключен к выходу первого нелинейного блока, а выход блока перемножения соединен с вторыми входами первого и второго сумматоров.
| СПОСОБ УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНЫМ САМОЛЕТОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2392186C2 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И КОМПЛЕКСНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327602C1 |
| Щит для бесчердачных покрытий | 1949 |
|
SU86326A1 |
| САМОЛЕТ С УЛУЧШЕННЫМИ ХАРАКТЕРИСТИКАМИ ПРОДОЛЬНОЙ УСТОЙЧИВОСТИ | 1993 |
|
RU2070138C1 |
| CN 105035307 A, 11.11.2015. | |||

