Изобретение относится к судоходству, в частности к способу транспортировки ледовых образований на морской акватории.
Для обеспечения ледовой безопасности для морских платформ, ветрогенерационных установок и иных конструкций, установленных в арктических морях, могут быть применены различные методы. На сегодняшний день наиболее эффективным из существующих общепризнанных методов отклонения ледовых образований, к которым относятся айсберги, торосы, льдины и т.д., от траектории их движения считается буксировка одним судном с помощью синтетического каната или специальной сети, например, по патенту № 205321 на полезную модель «Устройство для буксировки ледяных образований».
В диссертационной работе «Обеспечение защиты от айсберговой угрозы объектов обустройства нефтегазовых месторождений арктического шельфа», Корнишина К.А., от 23.06.2022г., Москва, «РГУ нефти и газа (НИУ) имени И.М. Губкина, как наиболее близкой по техническому решению способа транспортировки айсбергов и принятой за прототип, предложен способ транспортировки ледового образования, а именно айсберга, при котором Судно-буксир с штатным буксирным оборудованием, встает в направлении дрейфа айсберга на безопасном расстоянии и фиксируется на безопасном от него расстоянии. К разложенному на кормовой палубе концу каната через соединительную скобу прикрепляется плавучий якорь с сигнальным буем, который опускают с кормы в воду. Далее судно по ходу выполняет маневр вокруг ледового образования, при этом происходит автоматическое стравливание каната за счет сопротивления, создаваемого плавучим якорем. Вернувшись к сброшенному концу каната, его извлекают из воды, и затем осуществляется закрепление обоих концов каната на палубе. После завершения монтажа системы транспортировки судно может непосредственно выполнять буксировку по выбранному курсу.
По завершению буксировки ледового образования производится разбор системы, начиная с демонтажа крепежного устройства. Далее на один из концов снова устанавливается плавучий якорь вместе с сигнальным буем и спускается за борт. Другой конец остается закрепленным, либо закрепляется по-новому. С помощью кормового шпиля канат поднимается на палубу.
При всех преимуществах данного метода ему присущ ряд трудностей. В частности, при маневрировании судна вокруг ледового образования возникает необходимость приближения к ледовому образованию на достаточно близкое расстояние. В случае опрокидывания ледового образования или откалывании от него крупных частей судно может быть подвергнуто опасности.
Другой проблемой является поведение свободного конца буксировочного каната с закрепленным морским якорем. В процессе маневрирования судна, канат может дрейфовать в неизвестную сторону, а значит его обнаружение может представлять некоторую сложность. Кроме того, канат может дрейфовать в направлении ледового образования и для его подъема может потребовать вход судна в опасную зону ледового образования. И наконец, существуют сложности подъема из воды дрейфующего свободного конца каната.
Технический результат предлагаемого способа заключается в повышении безопасности и надежности проведения операции при транспортировке ледовых образований.
Для достижения технического результата используют буксировочное судно оснащенное штатным оборудованием, которое включает судовой кран, лебедку с тросом, канат и т.д., а также роботизированный буй, который обеспечивает удержание одного из концов каната в заданной точке акватории при волнении до 2-х баллов во время стравливания каната с палубы судна при заведении каната за ледовое образование, тем самым повышая надежность проведения работы по буксировке ледового образования для изменения его траектории движения и безопасность выполнения всей операции, при этом контроль и управление в реальном времени за ее ходом осуществляет оператор с пульта управления расположенным на судне.
Предлагаемый способ транспортировки ледового образования осуществляется буксировочным судном со штатным буксирным оборудованием с использованием буя, судно подходит к ледовому образованию на безопасное расстояние, на палубе судна раскладывают буксировочный канат, один конец которого фиксируют за гак троса лебедки, а другой на роботизированном буе, который с помощью судового крана опускают за борт, после чего оператор с бортового пульта управления буем через систему связи Wi-Fi или Лора задает точку фиксации местоположения буя на заданном месте по координатам с использованием систем GPS или ГЛОНАСС, по которым последний отслеживает показания мониторинга окружающей среды, корректирует и удерживает заданную точку с помощью движителей установленных в нем, затем буксировочное судно начинает движение на малом ходу вокруг ледового образования с одновременным автоматическим стравливанием каната за счет сопротивления создаваемого буем, совершает обход ледового образования и заканчивает движение при достижении местоположения буя, после чего осуществляют зацеп и подъем буя из воды на палубу, отсоединяют закрепленный на нем конец каната, затем оба конца каната крепят к гаку троса буксировочной лебедки судна, после чего буксировочное судно начинает движение транспортируя ледовое образование в заданное место.
Работа предлагаемого способа заключается в следующем: судно-буксир с подготовленным и разложенным на кормовой палубе полистиловым (полиамидным) канатом диаметром 15-20 см и длиной 1500-2000 м, приближается к ледовому образованию и стопорится на безопасном расстоянии. Конец каната закрепляют через такелажную скобу 12 с роботизированным буем, который затем цепляют к судовому крану через спуско-подъемную раму 8 и опускают в воду. По команде оператора с бортового пульта управления, находящегося на судне, через систему связи WI-FI или Лора 11 роботизированный буй фиксируют на заданном месте по координатам получаемых с помощью систем GPS или ГЛОНАСС 9. Далее судно выполняет обход вокруг ледового образования на малом ходу, с палубы судна происходит автоматическое стравливание каната за счет сопротивления, создаваемого роботизированным буем, при этом роботизированный буй отслеживает состояние окружающей среды, например, балльность волнения, изменение направления течения и в зависимости от показателей удерживает заданную ему точку подруливанием, установленными на нем четырьмя движителями 3, расположенными в четырех направлениях. Оператор осуществляет контроль за положением буя при помощи бортового пульта управления. При достижении судном роботизированного буя со свободным концом каната, закрепленным на нем осуществляют его извлечение из воды на палубу с помощью судового крана, затем оба конца каната крепят к гаку троса буксировочной лебедки судна и судно начинает транспортировать ледовое образование в заданное место. Во время буксировки необходимо контролировать поведение буксирного устройства, буксировочного каната и ледового образования. При достижении конечного места буксировки ледового образования происходит обратный сбор каната. Для этого на один из свободных концов каната заново прикрепляется роботизированный буй. Другой конец остается закрепленным на судне. После чего этот конец сгружается в воду с помощью судового крана. После того, как свободный конец с роботизированным буем погружается в воду с помощью судового крана. Роботизированный буй отходит от судна для удержания заданной точки, судно начинает медленное движение вокруг айсберга. При движении судна осуществляется сбор каната при помощи шпилей, расположенных на кормовой палубе. Скорость судна не должна превосходить скорости сбора каната, чтобы не привести к наматыванию каната на гребной винт.
Необходимым элементом для осуществления предлагаемого способа, как и у прототипа, является буй. В отличие от сигнального, которой только обозначает его местонахождение на поверхности акватории, роботизированный буй обладает функциями мониторинга окружающей среды, возможностью удержания и фиксации по координатам своего местоположения с помощью установленных на нем четырех разнонаправленных движителей, осуществляющих подруливание по необходимости.
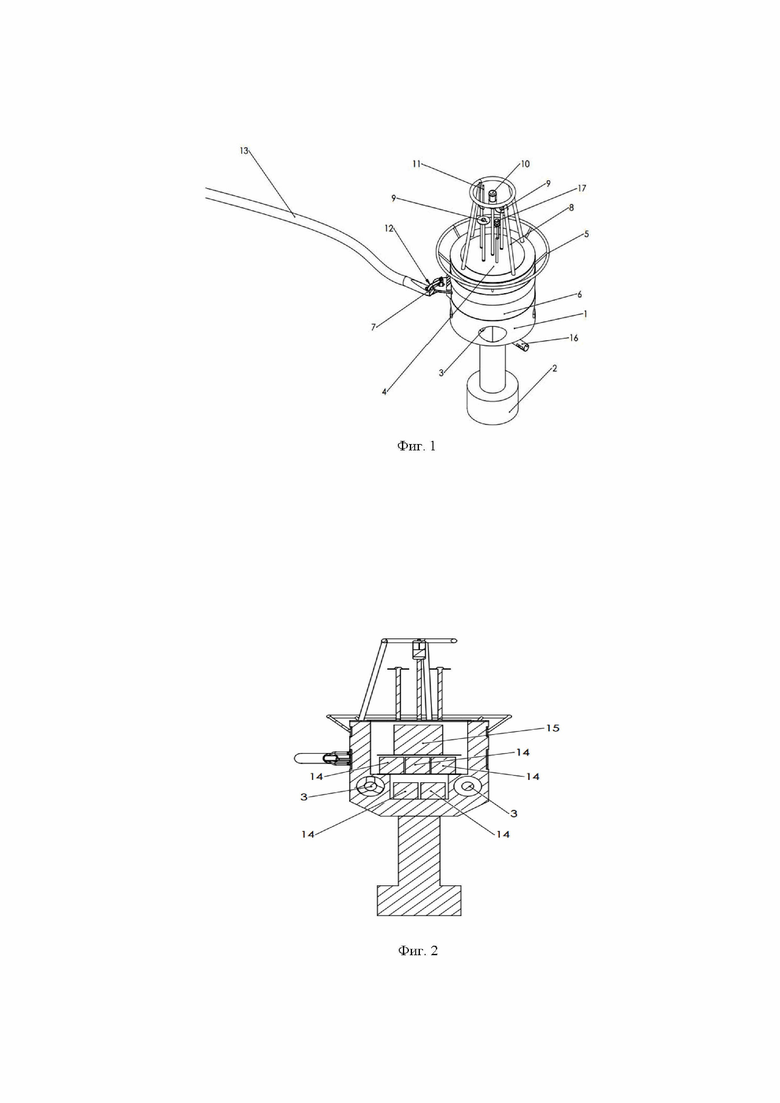
Конструкция роботизированного буя представлена на фигурах 1 и 2.
На корпусе буя предусмотрены элементы для спускоподъемных операций. Буй оборудован перилами 5 по периметру для удобного подтягивания буя к борту судна. Спуско-подъемные операции могут осуществляться штатными средствами судна носителя. На верхней части буя установлена рама 8, предназначенная для спускоподъемных работ. За раму цепляется гак судового крана. Кран спускает буй рядом с корпусом судна для удобного отцепления. По команде оператора буй двигается в автономном режиме на заданную точку. Для подъема буя все происходит также в обратном порядке.
На буе (фиг.1,2) установлен движительный комплекс, состоящий из четырех моторов 3 убранных в корпус 1 и аккумуляторов 14, который позволяет управлять и удерживать на нужной точке в море. Роботизированный буй оснащен системой связи, а именно антенной Wi-Fi 11, антенной связи Лора 11, системой GPS/ГЛОНАСС 9 для определения координат, электромагнитным компасом, вычислительным модулям, ходовыми огнями 10 и системой мониторинга окружающей среды. Система мониторинга окружающей среды включает метеостанцию для измерения скорости и направления ветра, а также датчики для измерения температуры воздуха и влажности 17, в нижней части буя установлен многопараметрический зонд для выявления изменений параметров воды с анализом качества водной среды для передачи в автоматизированную систему контроля качества 16.
Конструкция буя (фиг.1,2) выполнена со стальным поясом 6 с местом для зацепа троса 7 и такелажной скобой 12 для фиксации троса к бую, с рамой для спуско-подъемных работ 8, рамой 5 для подтягивания буя с помощью багра, также в конструкции предусмотрены ящик 15 установленный внутри буя для электроники, груз 2 закрепленный внизу буя для устойчивости, крышка 4 для закрытия внутреннего пространства буя и трос 13 для буксировки ледового образования.
Буй после рабочей смены ставится на зарядку от корабельных систем. Связь между пультом управления и буя, осуществляется с помощью Wi-Fi, и модуля связи Лора, GPS/ГЛОНАСС системы позиционирования.
Таким образом, предлагаемое конструктивное исполнение роботизированного буя обеспечивает выполнение им основной функции удержания фиксированной координаты его местоположения для безопасной и надежной транспортировки ледовых образований при управлении его работой оператором с бортового пульта на судне в реальном времени или удержании точки в автоматическом режиме.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ транспортировки крупного айсберга | 2020 |
|
RU2743239C1 |
| СПОСОБ АКТИВНОЙ БОРЬБЫ С АЙСБЕРГОВОЙ ОПАСНОСТЬЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2425929C1 |
| СПОСОБ АКТИВНОЙ БОРЬБЫ С АЙСБЕРГОВОЙ ОПАСНОСТЬЮ И УСТРОЙСТВО ДЛЯ АКТИВНОЙ БОРЬБЫ С АЙСБЕРГОВОЙ ОПАСНОСТЬЮ | 2012 |
|
RU2484209C1 |
| СПОСОБ АКТИВНОЙ БОРЬБЫ С АЙСБЕРГОВОЙ ОПАСНОСТЬЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2467121C1 |
| СПОСОБ СООРУЖЕНИЯ ПРОЛЕТНОГО СТРОЕНИЯ ВАНТОВОГО МОСТОВОГО ПЕРЕХОДА ЧЕРЕЗ МОРСКОЙ СУДОХОДНЫЙ ПРОЛИВ | 2015 |
|
RU2612050C1 |
| ОПЕРАЦИИ АРКТИЧЕСКОЙ СЕЙСМОРАЗВЕДКИ | 2014 |
|
RU2624835C2 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
| Система экстренной эвакуации персонала морских платформ в ледовых условиях | 2019 |
|
RU2718799C1 |
| МОРСКАЯ СЕЙСМОРАЗВЕДКА В ПОКРЫТЫХ ЛЬДОМ ИЛИ ИМЕЮЩИХ ПРЕПЯТСТВИЯ ВОДАХ | 2013 |
|
RU2570428C2 |
| МОРСКАЯ СЕЙСМОРАЗВЕДКА В ПОКРЫТЫХ ЛЬДОМ ИЛИ ИМЕЮЩИХ ПРЕПЯТСТВИЯ ВОДАХ | 2010 |
|
RU2487374C2 |
Изобретение относится к судоходству, в частности к способу транспортировки ледовых образований на морской акватории. Для транспортировки ледового образования используют буксировочное судно со штатным буксирным оборудованием и буй. Судно подходит к ледовому образованию на безопасное расстояние, на палубе судна раскладывают буксировочный канат, один конец которого фиксируют за гак троса лебедки, а другой на роботизированном буе, который с помощью судового крана опускают за борт. Оператор с бортового пульта управления буем через систему связи Wi-Fi или Лора задает точку фиксации местоположения буя на заданном месте по координатам с использованием систем GPS или ГЛОНАСС, по которым последний отслеживает показания мониторинга окружающей среды, корректирует и удерживает заданную точку с помощью движителей, установленных в нем. Буксировочное судно начинает движение на малом ходу вокруг ледового образования с одновременно автоматическим стравливанием каната за счет сопротивления, создаваемого буем, совершает обход ледового образования и заканчивает движение при достижении местоположения буя. Осуществляют зацеп и подъем буя из воды на палубу, отсоединяют закрепленный на нем конец каната, затем оба конца каната крепят к гаку троса буксировочной лебедки судна. Буксировочное судно начинает движение, транспортируя ледовое образование в заданное место. Достигается повышение безопасности и надежности проведения операции при транспортировке ледового образования для изменения его траектории движения. 2 ил.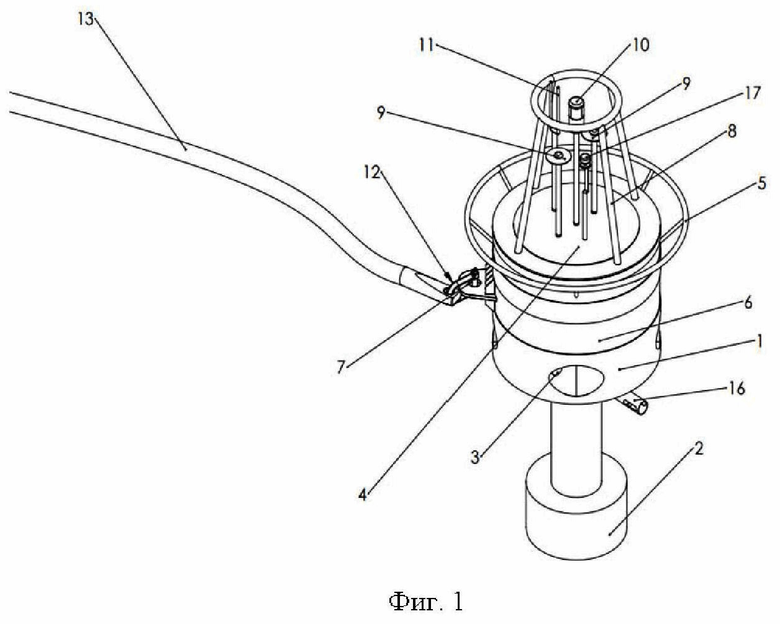
Способ транспортировки ледового образования, характеризующийся наличием буксировочного судна со штатным буксирным оборудованием и буя, судно подходит к ледовому образованию на безопасное расстояние, на палубе судна раскладывают буксировочный канат, один конец которого фиксируют за гак троса лебедки, а другой на роботизированном буе, который с помощью судового крана опускают за борт, после чего оператор с бортового пульта управления буем через систему связи Wi-Fi или Лора задает точку фиксации местоположения буя на заданном месте по координатам с использованием систем GPS или ГЛОНАСС, по которым последний отслеживает показания мониторинга окружающей среды, корректирует и удерживает заданную точку с помощью движителей, установленных в нем, затем буксировочное судно начинает движение на малом ходу вокруг ледового образования с одновременным автоматическим стравливанием каната за счет сопротивления, создаваемого буем, совершает обход ледового образования и заканчивает движение при достижении местоположения буя, после чего осуществляют зацеп и подъем буя из воды на палубу, отсоединяют закрепленный на нем конец каната, затем оба конца каната крепят к гаку троса буксировочной лебедки судна, после чего буксировочное судно начинает движение, транспортируя ледовое образование в заданное место.
| МНОГОКАНАЛЬНАЯ СЕЙСМОСТАНЦИЯ С ЦИФРОВОЙ ПРОМЕЖУТОЧНОЙ МАГНИТНОЙ ЗАПИСЬЮ | 0 |
|
SU205321A1 |
| СПОСОБ ТРАНСПОРТИРОВКИ ЛЬДА АЙСБЕРГОВ ДЛЯ ПОЛУЧЕНИЯ ПИТЬЕВОЙ ВОДЫ ИЗ НЕГО | 2004 |
|
RU2281878C2 |
| WO 2004113620 A1, 29.12.2004 | |||
| US 6616376 B1, 09.09.2003. | |||
