Перекрестные ссылки на родственные заявки
[0001] Эта заявка является частичным продолжением заявки США 13793544, зарегистрированной 11 марта 2013 года, и испрашивает приоритет предварительной заявки США 61793446, зарегистрированной 15 марта 2013 года, которые обе включены в данный документ по ссылке в своей полноте.
Уровень техники изобретения
[0002] Традиционная морская сейсморазведка использует сейсмический источник и множество сейсмоприемных кос, буксируемых позади сейсморазведочного судна. Эти сейсмоприемные косы имеют датчики, которые определяют сейсмическую энергию для формирования изображений формаций на дне моря. Развертывание сейсмоприемных кос и источников и буксировка их во время разведки могут быть относительно прямыми при работе в открытых водах с умеренными волнами или т.п.
[0003] Морские местоположения, покрытые льдом, мусором, большими волнами или другими помехами, могут делать разведку более трудной, дорогостоящей или даже невозможной. В покрытых льдом водах, например, сейсморазведочное судно должно проламываться сквозь лед и пересекать воды, наполненные плавающими ледяными полями. Шум, сформированный ударами о лед, может усложнять создаваемую сейсмическую запись.
[0004] Дополнительно, плавающие ледяные поля на поверхности воды делают буксировку источника и сейсмоприемных кос более трудной и подверженной повреждению. Например, любые компоненты системы на поверхности воды могут сталкиваться со льдом, тонуть и теряться. Кроме того, любые кабели или буксирные тросы, отходящие от судна даже в кормовом коридоре, могут собирать лед на поверхности. Аналогично, лед, который тянется под корпусом судна и поднимающийся за судном, может отрезать эти кабели и тросы.
[0005] Некоторые подходы для осуществления сейсмических исследований в покрытых льдом районах, известные в области техники, раскрыты в патентах США № 5113376 и 5157636 для Бьеркоя. На сегодняшний день, однако, проблемы, ассоциированные с морской сейсморазведкой в покрытых льдом или загроможденных водах, не были в значительной степени устранены. Предмет изучения настоящего изобретения направлен на преодоление, или, по меньшей мере, уменьшение действий, одной или более проблем, изложенных выше.
Сущность изобретения
[0006] Морская сейсморазведка выполняется в покрытых льдом водах посредством первоначального планирования маршрута исследования, пересекающего район исследования. Первоначальный маршрут планируется на основе первоначальных ледовых условий в районе исследования, имеющем покрытые льдом воды. После подготовки системы, сейсмическая система развертывается в воду с исследовательского судна в районе исследования. Это типично выполняется в районе, относительно свободном ото льда. По меньшей мере, одно сопровождающее судно сопровождает исследовательское судно, когда оно проходит маршрут исследования и получает сейсмические данные. Исследовательское судно буксирует сейсмическую систему под поверхностью покрытой льдом воды, чтобы избегать льда. В то же время, системы и операторы наблюдают в районе исследования по маршруту исследования за фактическими ледовыми условиями. Таким образом, сопровождающее судно может контролировать фактические ледовые условия по маршруту исследования, таким образом, исследовательскому судну не нужно останавливаться.
Краткое описание чертежей
[0007] Фиг.1A-1B иллюстрируют виды сбоку и сверху системы морской сейсморазведки, имеющей сопровождающее судно и исследовательское судно, которые проходят маршрут исследования вместе, чтобы выполнять морскую сейсморазведку в покрытых льдом водах, таких как встречающиеся в Арктике.
[0008] Фиг.2A-2B показывают виды сбоку и сверху системы морской сейсморазведки согласно некоторым учениям настоящего изобретения для использования в покрытых льдом районах.
[0009] Фиг.3 иллюстрирует набор процедур для выполнения сейсмических исследований в покрытых льдом водах, таких как арктические или другие полярные регионы.
[0010] Фиг.4 схематично иллюстрирует район арктического моря, имеющий историческую толщину льда, нанесенную на него.
[0011] Фиг.5A схематично иллюстрирует район арктического моря, имеющий сейсмические маршруты, запланированные в нем.
[0012] Фиг.5B схематично иллюстрирует район арктического моря, имеющий первоначальный план исследований, нанесенный на него.
[0013] Фиг.6A-6B иллюстрирует два типа ледовых скегов для использования в раскрытой системе.
[0014] Фиг.7 иллюстрирует технологию для развертывания групп источников с ледового скега.
[0015] Фиг.8 схематично иллюстрирует различные системы кораблей для сейсмического исследования.
[0016] Фиг.9A-9D изображает схематически, как сейсмоприемная коса развертывается с исследовательского судна и защищается в ледовом скеге.
[0017] Фиг.10A-10В иллюстрируют технологии для обращения со льдом в районе исследования посредством сопровождающего судна, чтобы расчищать маршрут сейсмического исследования для исследовательского судна.
[0018] Фиг.11 изображает схематически сопровождающее судно, принимающее во внимание угол смещения при очистке маршрута сейсмического исследования для исследовательского судна.
[0019] Фиг.12A-12B изображают схематически, как исследовательское судно может принимать во внимание флюгирование сейсмоприемной косы при избегании ледяных препятствий с глубоким килем.
Подробное описание изобретения
A. Обзор системы
[0020] Система 10 морской сейсмической разведки иллюстрируется на фиг.1A-1B и на фиг.2A-2B. Система 10 имеет сопровождающее судно 20 и исследовательское судно 30, которые проходят маршрут исследования вместе, чтобы выполнять морскую сейсмическую разведку в покрытых льдом водах, таких как встречающиеся в Арктике или другом приполярном регионе. Система 10 сейсмической разведки использует оборудование и технические приемы, которые раскрыты во включенных в документ патентных заявках США.
[0021] Система 10 может быть использована в покрытых льдом районах, имеющих глетчерный лед, паковый лед, плавающие ледяные поля или другие препятствия или помехи на поверхности воды, которые могут сталкиваться с буксируемыми компонентами системы 10 морской сейсмической разведки. В этой конкретной системе 10 сопровождающее судно 20 является ледокольным судном, который движется впереди исследовательского судна 30 и имеет задачу разламывать плавающие ледяные поля, перемещать ледяные препятствия и другие процедуры, детализированные ниже. Исследовательское судно 30 проводит сейсмическую разведку посредством буксировки сейсмического оборудования (например, одной или более сейсмоприемных кос 60 и одного или более сейсмических источников 90) позади судна 30.
[0022] Сопровождение посредством дополнительного судна (не показано) может быть использовано по нескольким маршрутам и местным ледовым режимам. При некоторых обстоятельствах, например, такое дополнительное сопровождающее судно может облегчать ледовые условия по маршруту, ломая большие куски опасного льда или помогая судам 20 и 30 маневрировать вокруг них. Однако существуют некоторые ситуации, когда эффективность сопровождающего судна 20 может быть ограничена, например, когда путь становится узким, указывая, что лед находится под давлением. Различные превентивные этапы и меры раскрываются в данном документе, чтобы обращаться с этим типом ситуации.
[0023] Когда разведка проводится по маршруту исследования, ледокольное судно 20 и/или само исследовательское судно 30 могут ломать паковый лед впереди буксируемых сейсмоприемных кос 60 и источников 90. Судна 20 и 30 проходят маршрут исследования и формируют сейсмические сигналы от источника 90. Датчики 70, которые могут быть гидрофонами или т.п., расположенными на сейсмоприемных косах 60, обнаруживают сейсмическую энергию, которая записывается как часть сейсмической записи для исследования.
[0024] Когда исследовательское судно 30 буксирует сейсмоприемные косы 60, например, система 45 электроснабжения задействует источник(и) 90, и система 40 управления на судне 30, имеющая сейсмическое устройство записи, записывает сейсмические данные, полученные с помощью датчиков 70 на сейсмоприемных косах 60. Чтобы защищать соединение от судна 30 до сейсмоприемных кос 60 и источников 90, исследовательское судно 30 имеет ледовый скег 50, который устанавливается на судно 30 и предпочтительно на задней части или корме судна. Дальний конец скега протягивается ниже ватерлинии судна и может даже протягиваться на несколько метров ниже киля судна.
[0025] Буксируемое оборудование исследовательской системы 10 развертывается с судна 30 и имеет множество кабелей 65 для сейсмоприемных кос 60 и кабелей 95 для сейсмических источников 90. Чтобы защищать эти кабели 65 и 95, канал в ледовом скеге после кромки удерживает кабели 65 и 92 и направляет их ниже ватерлинии судна. Таким образом, поверхность льда не может сталкиваться с кабелями 65 и 95, в то время как сейсмоприемные косы 60 и источники 90 буксируются.
[0026] В частности, кабели 65 сейсмоприемных кос, соединенные с сейсмическим записывающим устройством системы 40 управления, протягиваются от судна 30, и скег 50 направляет эти кабели 65 сейсмоприемных кос ниже поверхности воды, так что лед не будет сталкиваться или накапливаться вокруг кабелей 65. Со своей стороны, сейсмический источник 90 имеет множество элементов 91 сейсмического источника, которые типично являются воздушными пушками, и кабели 95 электропитания, соединенные с системой 45 электроснабжения, протягиваются от судна 30 к источнику. Ледовый скег 50 направляет кабели 95 электропитания ниже поверхности воды так, что лед не будет сталкиваться с, либо накапливаться вокруг этих кабелей 95.
[0027] Протягивающийся ниже ватерлинии судна ледовый скег 50 также имеет различные точки присоединения для буксирных тросов 62/92, которые удерживаются ниже поверхности воды. Например, буксирный трос 62 соединяет кабель 65 сейсмоприемной косы с ледовым скегом 50 и помогает буксировать сейсмоприемную косу 60 под водой позади судна 30. Аналогично, буксирный трос 92 соединяет кабель 95 источника с ледовым скегом 50 и помогает буксировать источник 90 позади судна 30.
[0028] Поскольку сейсмоприемные косы 60 буксируются под поверхностью воды, сейсмоприемные косы 60 могут иметь развернутые устройства, такие как плавники, крылья, отклонители, глиссерные буи, дистанционно управляемые транспортные средства (ROV), дистанционно управляемые буксируемые транспортные средства (ROTV) и автономно управляемые транспортные средства (AOV), которые могут быть способны к направленному и позиционирующему управлению. Например, управляемые развертываемые устройства могут быть буксируемыми транспортными средствами, которые могут позиционировать сейсмоприемные косы 60 индивидуально в поперечной или вертикальной позициях под поверхностью воды. Кроме того, концы сейсмоприемных кос 60 могут иметь конкретные управляемые транспортные средства с приемниками системы глобального позиционирования (GPS), чтобы определять местоположение сейсмоприемных кос 60 и их датчиков 70.
[0029] Чтобы обеспечивать определение местоположения сейсмоприемных кос 60 и датчиков 70 для исследования, могут быть предусмотрены хвостовые буи (не показаны), которые плавают на поверхности воды, чтобы получать GPS-показания. Альтернативно, если управляемые устройства 80 используются на хвостах сейсмоприемных кос 60, управляемые устройства 80 могут периодически доставляться на поверхность, когда она расчищена от плавающих ледяных полей или других препятствий, таким образом, GPS-показатели могут быть получены с помощью устройств 80 и сообщены системе 40 управления. После получения GPS-показателей управляемые устройства 80 могут плыть обратно под поверхность. Устройство инерционной навигационной системы (INS), интегрированная навигационная система или другая система может быть использована, чтобы дополнять GPS-показания, таким образом, местоположение сейсмоприемных кос 60 может быть определено, даже когда значительные плавающие ледяные поля на поверхности мешают управляемым устройствам 80 получать GPS-показания.
[0030] Как дополнительно показано на фиг.2B, отклонители, плавники или заслонки 64 и распределитель 66 могут быть использованы, чтобы поддерживать множество сейсмоприемных кос 60 позади исследовательского судна 30. Эти отклонители 64 и распределитель 66 могут также быть аналогичны традиционным компонентам, используемым для морской сейсморазведки, за исключением того, что отклонители 64 предпочтительно буксируются под поверхностью воды, чтобы избегать льда на поверхности воды.
[0031] В результате могут быть использованы различные конфигурации источников 90. На фиг.1A-1B, например, два источника 90 могут быть использованы и могут буксироваться вертикально. При задействовании вертикально размещенного источника 90 стрельба элементов источника или пушек 91 может быть рассчитана, чтобы учитывать любой наклон, который вертикальный источник 90 имеет. Эта рассчитанная стрельба может поддерживать точность источника 90 и сохранять обращенную вниз характеристику создаваемого сигнала сейсмического источника.
[0032] Соответственно, группа для вертикально размещенного источника 90 может быть оснащена, по меньшей мере, одним приемопередатчиком с ультракороткой базой (USBL) и одним датчиком давления на конце группы. USBL-датчик опрашивается USBL-системой (не показана), расположенной на судне 30. Угол свешивания (буксировки) от вертикали источника 90 измеряется, и соответствующая временная задержка вычисляется и применяется к каждой пушке 91 источника 90. В этом случае, источник 90 позиционируется с помощью непосредственного рассогласования с опорной точкой судна.
[0033] На фиг.2A-2B источник(и) 90 могут буксироваться горизонтально позади судна 30. Некоторые традиционные сейсмические методики, связанные с источником, могут быть использованы для источника(ов) 90. Например, сейсмическая группа для источника 90 может быть оборудована, по меньшей мере, двумя гидрофонами ближнего поля, датчиком глубины на каждой позиции пушки и одним датчиком давления для каждого элемента сейсмической группы. Однако другие практики соблюдаются вследствие буксировки в покрытых льдом водах. В буксируемой исследовательской системе 10 позади судна 30, например, плавательное средство 94 может быть использовано, чтобы поддерживать источник 90 горизонтально. Предпочтительно, это устройство 94 плавает под поверхностью воды, чтобы избегать плавающих ледяных полей. Дополнительные детали, относящиеся к системе 10 морской сейсморазведки, раскрыты во включенных в документ патентных заявках США.
B. Процедуры
[0034] Как будет понятно из предоставленного выше описания системы 10, сейсмическая разведка в Арктике или других районах, покрытых льдом, имеет уникальные проблемы, так, сейсмическая разведка требует конкретных процедур для работы в ледовых режимах. С этой целью, фиг.3 иллюстрирует набор процедур 100 для выполнения сейсмических исследований в покрытых льдом водах, например, в Арктике или других приполярных районах. Этот набор процедур 10 дает общее представление об операциях сейсмической разведки в покрытых льдом водах. Характерные особенности, связанные с процедурами 100, предоставляются более подробно позже.
[0035] Вначале, операторы тщательно планируют маршрут для исследования желаемого района океана, где лед находится (или может быть) (блок 110). Конечно, маршрут исследования планируется, чтобы лучше исследовать поверхность океана, которая должна быть изучена. В отличие от традиционного исследования, когда исследовательское судно 30 может просто пересекать район без значительных помех, операторы планируют маршрут исследования в покрытом льдом районе с особым вниманием к погодным условиям, текущим и историческим ледовым режимам и т.п.
[0036] Одновременно с планированием маршрута исследования операторы выбирают необходимые судна 20 и 30 и оборудование сейсмической системы 10, чтобы проводить запланированное исследование (блок 120). Эти выборы выполняются с учетом окружающей среды покрытых льдом районов, с которой предполагается встретиться. Например, судна 20 и 30 выбираются, чтобы действовать в ледовом режиме, погодных условиях и т.п. Те же соображения применимы к выбору сейсмоприемных кос 60, источников 90 и другого сейсмического оборудования системы 10.
[0037] После того как судна 20 и 30 и оборудование системы выбраны, операторы подготавливают судна 20 и 30 и устанавливают оборудование системы (блок 130). Эти приготовления могут включать в себя оснастку исследовательского судна 30 конкретным оборудованием для проведения сейсмической разведки во льдах, такую как установка ледового скега 50 на исследовательское судно 30, модификация палуб на судне 30 и обновление другого оборудования, когда необходимо.
[0038] После всех этих процедур операторы могут начинать запланированную сейсморазведку, выводя систему 10 в начало запланированного маршрута (блок 140). Даже движение судов 20 и 30 в желаемый район требует особого планирования, когда район имеет лед, например, в Арктике. Например, первоначальный маршрут может быть необходимо запланировать, чтобы приводить исследовательское судно 30 в соответствующее начальное местоположение, таким образом, оборудование системы 10 может быть развернуто без значительных помех ото льда.
[0039] После прибытия в запланированное начальное местоположение, операторы затем начинают развертывать оборудование, чтобы начинать сейсмическую разведку (блок 150). Например, сейсмоприемные косы 60 и источники 90 развертываются. Поскольку эти процедуры выполняются в или рядом с покрытыми льдом водами, операторы используют технологии развертывания, отличные от общих традиционных процедур развертывания, используемых в обычных рабочих водах.
[0040] Также, операторы проводят сейсмическую разведку с помощью развернутого оборудования, проходя запланированный маршрут исследования (блок 160). Поскольку покрытый льдом район изменяется динамически и имеет множество потенциальных опасностей и препятствий, операторы постоянно наблюдают за угрозами, управляют льдом, изменяют маршрут, если необходимо, и обрабатывают аварийные ситуации.
[0041] С пониманием системы 10 сейсморазведки и набора процедур 100 для проведения разведки в покрытых льдом водах, обсуждение не обращается к конкретным деталям системы 10 и процедур 100 для проведений сейсмических разведок в покрытых льдом водах.
C. Арктическое планирование
[0042] Как отмечено выше в блоке 110 на фиг.3, сейсмическая разведка начинается с того, что операторы тщательно планируют маршрут для исследования желаемого района океана, где находится (или может присутствовать) лед. Чтобы определять лучший план для исследования, операторы анализируют лед в интересующем регионе в течение текущего и предыдущих лет ледового покрова, чтобы определять подходящее местоположение, в котором необходимо начинать исследование. Точка окончания исследования может быть выбрана как более удобный фрагмент, где формируется новый лед, например.
[0043] Используя предназначенные маршруты и трассы, желательные для исследования морского дна в качестве направления, операторы затем разрабатывают первоначальный план съемки, который будет предоставлять возможность исследовательскому судну 30 проходить маршруты и трассы исследования и в конечном счете получать желаемые сейсмические данные. Для этого операторы получают полезную информацию, чтобы оценивать регион, лед и другие признаки и затем разрабатывать первоначальный план. Полезная информация включает в себя спутниковые изображения, ледовые карты, прогноз погоды, моделирование льда и т.п. из различных источников, таких как Арктический и Антарктический научно-исследовательский институт (AARI), Canatec и Датский метеорологический институт (DMI). Полезная информация также включает в себя изображения геопривязки; карты ледовой обстановки; прогноз полей приводного давления; метеорологические сводки; сводки сжатия ледовых полей; сводки дрейфа льда; сводки локализации и перемещения разломов в ледовых полях; сводки волнения для свободных ото льда вод; воздушная разведка льда; измерения глубины льда; AES-изображения; ледовые карты; и ледовые прогнозы.
[0044] Спутниковые изображения могут включать в себя MODIS, Envisat и RADARSAT. Например, Radarsat предоставляет радиолокационный снимок высокого разрешения для полосы обзора спутника. Как разрешение изображения, так и ширина полосы обзора могут изменяться в пределах. Изображения MODIS предоставляют резкую видеоинформацию, когда обзоры апертур не загорожены облачным покровом.
[0045] Во многих районах Арктики оценки ледовых режимов и концентраций могут быть определены для множества лет. Например, данные AARI (Арктический и Антарктический научно-исследовательский институт) могут быть использованы, чтобы анализировать лед в течение различных лет, и могут быть использованы, чтобы определять, где начинать исследование в конкретной области и как продвигаться в исследовании до окончания в области формирования нового льда. Этот подход может быть наиболее прагматичным подходом, хотя другие варианты могут давать в результате большее накопление данных в режиме длинной сейсмоприемной косы.
[0046] На основе оценки операторы могут планировать план съемки и параметры исследования, чтобы смягчать проблемы. Например, исследование может по необходимости проводиться в ледовых режимах высоких концентраций льда (+90%). Если это тот случай, сейсмоприемные косы 60 для исследования могут быть укорочены (например, до 500 м). Кроме того, оценка может определять, какие типы льда могут преобладать в районе исследований, и знание типа льда, который должен быть встречен, может обеспечивать операторов полезными тактическими соображениями в разработке плана съемки и планировании для нештатных ситуаций. В качестве примера, в районе исследования может преобладать толстый однолетний (TFY) лед, многолетний (MY) лед и т.д., так что районы сильной торосистости, торосообразования и сжатия льдов могут развивать тактические соображения оператора и запланированный маршрут.
[0047] В качестве примера, фиг.4 схематично изображает спутниковое изображение 200, имеющее окружающие земельные массивы 202 и океан 204. Изображение 200 показывает различные толщины 206 льда в предполагаемом районе исследований. Информация для изображения 200 может быть получена с помощью спутниковой радиометрии, изображений Radarsat, MODIS, среднегодовых общих распределений скопления льда, распределений высоты ровного льда, распределений торосистого льда или другого способа или источника. Кромки льда, толщина льда и другие условия могут быть показаны в районе исследований. Обзор ледовых условий может показать, будет ли район исследований характеризоваться льдом, который является преимущественно толстым однолетним (TFY) льдом с меньшими концентрациями старого льда, или будет характеризоваться другими формами льда.
[0048] Из доступной информации некоторые районы исследования могут быть определены как более легкие, чем другие. В целом, ледовые условия могут быть обнаружены в некоторых местах, которые являются более суровыми, чем другие области, и понимание того, как ледовые режимы могут изменяться и иметь различные топографические признаки, может быть определено. В конечном итоге, тщательное планирование и стратегическое исполнение на основе этого планирования могут помогать операторам избегать проблем, поскольку способность выполнять операции развертывания и извлечения в открытой воде может быть очень ограничена в данном районе исследований.
[0049] В этих ледовых условиях операторы хотят исследовать различные фрагменты района, таким образом, операторы проходят различные маршруты исследования, где желательны сейсмические данные. Например, фиг.5A схематично изображает примерный район 200 исследований с желаемыми маршрутами или трассами 210 исследований, проложенными там, где сейсмические данные должны быть получены.
[0050] На основе анализа льда района, погоды и т.п. и учитывая, где желательны маршруты 210 исследований, операторы разрабатывают первоначальный план съемки, имеющий маршруты 210 исследований, пересекающие покрытый льдом район, чтобы получать сейсмические данные. Фиг.5B схематично изображает пример первоначального плана 220 съемки, который был сформулирован, после того как дана оценка ледовым режимам и погоде, определенным из спутниковых изображений, ледовых карт, погодных сводок, моделирования льда и другой информации. Первоначальный план 220 съемки детализирует маршрут исследования для сопровождающего и исследовательского судов 20 и 30 и показывает различные отрезки или сегменты маршрута и предложенный порядок. Районы с сильной торосистостью, торосообразованием и сжатием льдов могут быть спрогнозированы, таким образом, тактические соображения могут быть выведены. Поскольку различные отрезки могут пересекать твердый лед, практический опыт может диктовать измененный план во время операций. Поэтому планы действий в нештатных ситуациях могут быть разработаны с учетом этого понимания.
[0051] Как показано, могут быть определены секторы 222, 224, 226, 228, которые имеют различные ледовые условия. В этом примере первые два сектора 222, 224 могут включать в себя большую часть самого твердого льда, который должен встретиться в исследовании. Соединяющие маршруты 230 размещаются между запланированными маршрутами 210 исследования и секторами 222, 224, 226, 228 для непрерывного исследования. Дополнительно, предполагаемые маршруты 240 разламывания льда для сопровождающего судна 20 планируются и прокладываются относительно маршрутов 210 и 230. На основе оценок ледовых режимов и т.п. решения о параметрах исследования, такие как укорачивание длины сейсмоприемной косы, также первоначально планируются, поскольку развертывания/извлечения исследовательского оборудования в открытой воде могут быть очень ограничены в районе исследований.
[0052] Хотя не показано на фиг.5B, детали ледовых полей, погоды, ледовых условий и т.п. были использованы, чтобы создавать первоначальный план 220 съемки, и информация из этих деталей может быть предоставлена на первоначальном плане 220 съемки или может быть доступна отдельно. Принимая во внимание различные факторы, первоначальный план 220 съемки предпочтительно определяется с пониманием того, что ответственному за ледовую обстановку на исследовательском судне 30, в тесном совещании с командой контроля за ледовой обстановкой и другим персоналом во время фактических исследовательских операций, возможно потребуется вносить изменения в план 220 на основе текущих ледовых условий и связанных с ними операционных факторов.
D. Оборудование
[0053] При разработке первоначального плана 220 съемки, как обсуждалось выше, операторы выбирают и подготавливают необходимые суда и оборудование, чтобы проводить запланированное исследование, как указано ранее в блоке 120 на фиг.3. Разумеется, возможности судов и оборудования должны удовлетворять конкретному ледовому режиму, ожидаемому в первоначальном плане съемки и возможным непредвиденным обстоятельствам, которые могут встретиться.
1. Суда
[0054] Как отмечено выше, исследование использует, по меньшей мере, одно сопровождающее судно 20 и использует исследовательское судно 30. Эти суда 20 и 30 могут нуждаться в модификации, чтобы выполнять сейсмическую разведку в покрытом льдом районе. Сопровождающее судно 20 предпочтительно является ледокольным судном и может не нуждаться в особых модификациях в своей структуре. Однако исследовательское судно 30 может нуждаться в особых модификациях, чтобы проводить сейсмические исследования в покрытых льдом водах.
[0055] Ледокольное судно 20 может быть дизельным, атомным ледокольным судном и предпочтительно имеет двойной корпус с увеличенной толщиной в разламывающих лед зонах. Ледокольное судно 20 может также включать в себя дополнительные признаки, чтобы обеспечивать разрушение льда. Например, корпус может быть покрыт полимером, чтобы уменьшать трение. Дополнительно, ледокольным возможностям может содействовать система воздушной смазки, которая подает воздух из сопел под поверхностью льда. Также, ледокольное судно 20 может быть оборудовано, чтобы перевозить вертолеты и спасательные надувные лодки, и предпочтительно имеет соответствующие системы радио, спутниковой и другой связи. Эти и другие факторы могут быть учтены при выборе сопровождающего судна(ов) 20 для исследования.
[0056] Со своей стороны, исследовательское судно 30 необязательно должно классифицироваться как ледокольное судно и может иметь дизельную силовую установку. Однако исследовательское судно 30 предпочтительно в значительной степени усилено ото льда, чтобы работать в приполярных водах с преобладанием льда. Например, исследовательское судно 30 может иметь ледокольный нос, который предоставляет возможность судну 30 работать в агрессивном ледокольном режиме, по меньшей мере, в однолетнем льду. Кроме того, исследовательское судно 30 может иметь увеличенную толщину гальванического покрытия, может иметь двойной корпус и может иметь покрытие корпуса с низким коэффициентом трения, чтобы облегчать навигацию во льдах. Также, исследовательское судно 30 может продвигаться вперед посредством любого числа валов и может управляться посредством любого числа рулей, предназначенных для операций в тяжелом льду.
[0057] Поскольку большинство судов для использования в приполярных водах с преобладанием льда не особенно подходят для выполнения сейсмических исследований, исследовательское судно 30 может быть преобразовано, чтобы иметь полумодулярную 2D или 3D ледяно-сейсмическую способность. Палуба исследовательского судна 30 может быть модифицирована посредством установки двух вантовых массивов на швартовной палубе судна. Барабан сейсмической косы может быть установлен в кормовой части на верхней палубе судна. Дополнительно, контейнеры могут быть установлены на исследовательском судне 30 для комнаты сейсмического контроля, генераторов и компрессоров. Также, полеты вертолета могут быть необходимы, чтобы поддерживать ледовые операции, таким образом, оба судна оборудуются вертолетами и вертолетными площадками, чтобы поддерживать работу совместно.
2. Ледовый скег
[0058] Дополнительно, исследовательское судно 30 модифицируется посредством установки или сооружения, имеющего ледовый скег 50 на корпусе исследовательского судна 30. Как отмечено ранее, ледовый скег 50 устанавливается на судно 30 (предпочтительно на корме или задней части судна) и защищает прохождение буксируемого сейсмического оборудования от судна 30 в покрытые льдом воды.
[0059] Ледовый скег 50 может иметь различные конфигурации. Как показано, например, на фиг.6A, ледовый скег 50 может иметь единственный защитный проход 52 (фиг.6A). Проход 52 используется, чтобы обеспечивать защиту для гибких подводных кабелей и вводных кабелей 65 и 95 для сейсмоприемных кос 60 и источников 90. На фиг.6B скег 50 имеет множество защитных проходов 52. Эта установка предоставляет возможность выполнения полной перекладки руля и может помогать поддерживать маневренность исследовательского судна 30. Дополнительно, этот скег 50 на фиг.6B может использовать один или более челнок(ов) 57, которые могут двигаться вверх и вниз в скеге 50, чтобы поднимать и опускать точки 56 буксировки, при этом каждый челнок 57 способен управлять одним или более буксирными тросами для сейсмоприемных кос 60 и/или источников 90.
[0060] Так или иначе, ледовый скег 50 имеет основание или дальний конец 54, предусматривающий подводные точки 56 буксировки для находящегося в воде оборудования. Буксирные тросы 62 и 92 для сейсмоприемных кос 60 и источников 90 системы соединяются с этими точками 56 буксировки. Таким образом, эти буксирные тросы 62 и 92 разворачиваются под водой и далеко от каких-либо плавающих льдин, которые могут присутствовать на поверхности воды. Дополнительно, это помогает поддерживать буксируемое оборудование (60, 90) подо льдом и обеспечивает поддержание оптимальной глубины.
[0061] В одной конфигурации ледовый скег 50 предусматривает, по меньшей мере, три подводные точки 56 буксировки - одна на центральной линии и две другие управляемые с помощью лебедки точки буксировки. Эти две внешние точки 56 буксировки могут быть в нескольких метрах от левого и правого борта соответственно. Буксировочный вес сейсмоприемной косы 60 и пневматических пушек 90 может переноситься буксирными тросами 62 и 92, соединенными с этими точками 56 буксировки, в то время как кабели 65 и 95 укладываются в этот проход(ы) 52 ледового скега 50.
[0062] Как обсуждается позже, различные процедуры используются для операций с помощью ледового скега 50 вместе с процедурами для развертывания и извлечения сейсмоприемных кос 60 и источников 90. В целом, кабели от буксирных лебедок, предусмотренных на палубе судна 30, используются, чтобы тянуть гибкие подводные кабели и вводные кабели 65 и 95 в защитном проходе(ах) 52 позади скега 50.
3. Сейсмоприемная коса
[0063] В качестве другой части сейсмической системы 10 для покрытых льдом вод система 10 использует сейсмические косы 60 и систему записи. Один конкретный тип сейсмоприемной косы и системы записи включает в себя сейсмоприемные косы и систему записи DigiSTREAMER. Активная секция сейсмоприемной косы 60 имеет гидрофоны в качестве датчиков 70, расположенных по ее протяженности. Сейсмоприемная коса 60 имеет компонент шасси несущего элемента из немагнитного материала, такого как Vectran®. Сейсмоприемная коса 60 предпочтительно наполнена гелем. Твердотельные сейсмоприемные косы, наполненные пеной, как ожидается, станут неэластичными при более холодной погоде, что может создавать нежелательные проблемы с обращением с ними. Металлические компоненты сейсмоприемной косы 60 предпочтительно выполнены из титана для долговечности и коррозийной устойчивости.
[0064] Предпочтительно, вся сейсмоприемная коса 60 предпочтительно является новой, таким образом, плавучесть сейсмоприемной косы будет однообразной и может быть предварительно вычислена. Во время операций единообразная плавучесть, ожидаемая от сейсмоприемной косы 60, может помогать операторам балансировать плавучесть сейсмоприемной косы корректно, чтобы минимизировать контакт со льдом.
[0065] Сейсмоприемная коса 60 и система записи предпочтительно имеют возможность непрерывной записи, которая может быть использована, чтобы создавать множество выходных данных для записи. Это предоставляет возможность записи перекрывающихся данных во время исследования.
[0066] Также, сейсмоприемная коса 60 оборудуется контроллерами глубины (регуляторами глубины погружения), которые поддерживают глубину сейсмоприемной косы 60 во время исследования. Контроллеры глубины также предоставляют возможность приводить в действие сейсмоприемную косу 60 при близости к ледяным килям глубже 20 метров (или глубине исследования). Контроллеры погружения сейсмоприемной косы и компасы могут использовать тип ION 5011 DigiBird контроллера, доступный от компании ION Geophysical Corporation. Контроллер устанавливается внешне на сейсмоприемную косу 60 и предоставляет информацию о направлении по компасу, показатель глубины и регулируемое управление глубиной, чтобы помогать в балластировке сейсмоприемной косы 60.
[0067] Поскольку она используется в жестких условиях, сейсмоприемная коса 60 предпочтительно использует устройства подъема косы на поверхность, такие как устройства подъема косы SRD-500S. Устройства подъема на поверхность устанавливаются с подходящими интервалами (600 м) вдоль сейсмоприемной косы 60 и приспособлены, чтобы развертываться на более глубокую глубину (например, около 75 м), чем традиционные модели, чтобы предоставлять возможность сейсмоприемной косе 60 погружаться на более глубокую глубину, чтобы избегать ледяных килей во время исследовательских операций. Если сейсмоприемная коса 60 рвется или становится отсоединенной от исследовательского судна 30 и тонет, устройства подъема на поверхность автоматически детонируют на глубине воды около 75 м и выпускают сжатый CO2 в плавучий баллон. После того как баллон надувается, сейсмоприемная коса 60 всплывает на поверхность для извлечения.
4. Источник
[0068] В качестве другой части сейсмической системы для покрытых льдом вод система 10 использует один или более сейсмических источников 90, которые могут использовать группу пневматических пушек, например. Группа источника 90 типично имеет множество пневматических пушек и датчиков глубины. Источник 90 может или не может использовать отражатели и поплавки. Сейсмический источник 90 системы 10 имеет контроллер источника, который может быть традиционным компонентом, и источник 90 имеет регистрирующие приборы, такие как IAS (комплексная регистрирующая система).
[0069] Во время операций источник 90 непосредственно буксируется с ледового скега 50, и когда поплавки не используются, глубина источника 90 может зависеть от скорости судна во время развертывания. Другие конфигурации могут использовать поплавки, чтобы поддерживать источник 90 затопленным, несмотря на скорость.
[0070] В конфигурации, изображенной на фиг.7, два сейсмических источника 90a-b буксируются близко к корме и оборудованы группами вертикально распределенных элементов. Эта конфигурация не требует какой-либо системы буев и избегает проблем, ассоциированных с развертыванием системы буев во льду. В этой конфигурации источники 90a-b буксируются затопленными как находящиеся под углом цепочки близко к корме, так что буи не требуются. Для этих вертикально буксируемых источников 90a-b датчики глубины погружения и другие компоненты, обсужденные ранее, устанавливаются в конце элементов сейсмической группы.
[0071] Источники 90a-b буксируются с геометрией, которая центрируется по оси кабеля. Каждый источник 90a-b буксируется с фиксированной точки на скеге 50, которая определяет местоположение ближней пушки 91. Местоположение дальней пушки либо вычисляется из длины группы и вектора ультракороткой базы (USBL) от ледового скега 50 до последней пушки 91. Также, каждый источник 90a-b имеет встроенный датчик воздушного давления, предпочтительно на дальнем конце подвода воздуха группы.
[0072] Альтернативно, как отмечено ранее, сейсмический источник 90 может использовать поплавки или буи, чтобы размещать группу пушек горизонтально под поверхностью льда, например, как обсуждено со ссылкой на фиг.2A-2B. Для такого горизонтально буксируемого источника 90, по меньшей мере, два датчика глубины присоединяются к группе, один датчик установлен на каждом конце для наблюдения и регистрации глубин пушки. Источник 90 может затем буксироваться с фиксированной точки на скеге 50, которая определяет местоположение ближней пушки 91. Местоположение дальней пушки может тогда быть легко вычислено на основе длины группы пушек источника 90.
5. Дополнительные системы
[0073] В дополнение к вышеописанному оборудованию, сопровождающее и исследовательское суда 20 и 30 оснащаются дополнительным оборудованием. Например, исследовательское судно 30 может иметь дополнительное оборудование для обращения с сейсмическими компонентами, записи данных и управления сейсмическими операциями. Эти компоненты могут быть традиционными компонентами, используемыми в морской сейсморазведке.
[0074] Кроме того, суда 20 и 30 оснащаются системами 300 связи, навигационными системами 310, системами 320 наблюдения и т.п., как показано на фиг.8.
a. Системы связи
[0075] Для систем 300 связи на фиг.8 суда 20 и 30 могут быть оснащены системой радиосвязи между множеством судов для связи между судами 20 и 30 сейсмической системы 10. Примерная система радиосвязи является системой понятий радиосвязи множества судов (MVRS). Система радиосвязи использует оборудование беспроводной связи между множеством судов, которое предоставляет возможность ледокольному судну 20 осуществлять доступ ко всем вариантам отображения для сейсмоприемной косы 60, доступным на исследовательском судне 30.
[0076] Дополнительно, множество систем 300 связи могут быть использованы для связи между судами, включающей в себя обычные системы торгового флота VHF и SSD-радиосвязи, обеспечиваемой GMDSS-оборудованием. Используемые системы 300 связи подходят для использования на высоких широтах, встречающихся в Арктике. Например, оба судна 20 и 30 предпочтительно имеют систему спутниковой связи, такую как модуль Iridium Open Port, чтобы обеспечивать два корабля линией связи, которая может быть использована для голосовой и для электронной связи (т.е. передач электронной почты и файлов). Линия связи между двумя кораблями или система радиосвязи между множеством судов (MVRS) устанавливаются, главным образом, чтобы поддерживать обмен данными между кораблями и обмен данными с внешними источниками информации, такими как погодные изображения, спутниковые изображения и т.д., для систем навигации судов во льдах.
[0077] Суда 20 и 30 также используют систему 300 связи корабль-берег, способную к цифровой передаче данных, голосовой телефонной связи и службам электронной почты. Системы 300 связи предпочтительно предоставляют множество вариантов отображения операторам на обоих судах 20 и 30 и могут показывать поперечные формы сейсмоприемной косы и глубины кабелей.
b. Системы навигации и наблюдения
[0078] В дополнение к системам 300 связи, и ледокольное судно 20, и исследовательское судно 30 оснащаются навигационными системами 310, чтобы осуществлять навигацию исследовательского судна в покрытых льдом водах. Оба судна 20 и 30 также имеют системы 320 наблюдения для наблюдения за ледовыми условиями, погодой и другой информации, которая должна наблюдаться. Информация от этих систем 310 и 320 может быть получена из различных источников 330, таких как погодные службы, службы формирования спутниковых изображений, удаленных станций, GPS-служб и других.
[0079] Навигационные системы 310 предпочтительно используют формирование изображений почти в реальном времени или интерпретации с дополнительными наложениями радиолокационных изображений в реальном или почти реальном времени. Дополнительно, каждое судно 20 и 30 может предпочтительно просматривать и использовать изображение в радиолокационном диапазоне частот другого судна 20 и 30. Навигационные системы 310 включают в себя радиолокационные характеристики ледовых препятствий, такие как доступные от Sigma Radar Processing. Это улучшает навигацию во льдах и способность обнаруживать старый лед.
[0080] С помощью операционной системы ледового режима, погодных программ, ледовых программ и т.п. системы 310 и 320 навигации и наблюдения предоставляют возможность ледовому штурману выполнять оценки льда на основе доступной информации. Эти системы могут быть использованы в качестве базового руководства для навигации в ледовых режимах, встречающихся там. Системы могут также быть использованы для математических вычислений, проводимых операторами, такими как ледовый штурман или ледовый лоцман.
[0081] В частности, суда 20 и 30 поддерживаются посредством ледовых и погодных программ, которые автоматически получают периодические и регулярные ледовые изображения, интерпретации ледовых изображений, погодную информацию и аналогичную информацию. Каждое из судов 20 и 30 в работе снабжаются автоматически этой информацией. На тактическом уровне, суда 20 и 30 могут запрашивать специальные спутниковые изображения, и разрешение и интересующий район могут быть подстроены под требования. В дополнение к изображениям или погодным сводкам, профессиональная интерпретация данных может также быть получена из внешних источников 330.
[0082] Информация от источников 330 снабжает погодную программу судна погодными сводками, прогнозом и наблюдениями и снабжает ледовую программу судна ледовыми изображениями, ледовым анализом и ледовыми картами в комплекте с моделированием дрейфа льда. Как отмечено выше, полезная информация включает в себя изображения геопривязки; карты ледовой обстановки; прогноз полей приводного давления; метеорологические сводки; сводки сжатия ледовых полей; сводки дрейфа льда; сводки локализации и перемещения разломов в ледовых полях; сводки волнения для свободных ото льда вод; воздушную разведку льда; измерения глубины льда; AES-изображения; ледовые карты; и ледовые прогнозы. Информация предоставляется в совместимых форматах и разрешениях и с желаемой частотой (например, один или больше раз днем и ночью, при необходимости и т.д.).
[0083] Также, исследовательское судно 30 имеет системы 340 сейсмического контроля для получения сейсмических данных, управляющие работой сейсмических систем и наблюдающие за работой систем. Сопровождающее судно 20 может быть способно осуществлять доступ к информации, предоставленной системами 340 сейсмического контроля, так что сопровождающее судно 20 может определять позицию сейсмоприемных кос 60, буксируемых позади исследовательского судна 30; определять скорость, местоположение и направление исследовательского судна 30; и наблюдать за другой полезной информацией.
[0084] Многие аспекты систем 340 сейсмического контроля могут быть аналогичны тем системам, которые типично используются в традиционных морских сейсморазведках. Однако поскольку сейсмическая система 10 для использования в покрытых льдом водах имеет дополнительные элементы, системы 340 сейсмического контроля имеют дополнительные признаки управления и наблюдения, такие как раскрытые в объединенных патентных заявках США.
E. Исследовательские операции
[0085] После того как первоначальный план съемки (220: фиг.5B) определен, и оборудование готово, операторы могут начинать запланированное сейсмическое исследование, выводя оборудование к началу запланированного пути, как отмечено ранее в блоке 150 на фиг.3. Когда исследовательское судно 30 покидает верфь, все снаряжение устанавливается и закрепляется в позициях для перевозки. Затем сейсмическая коса(ы) 60 и группа(ы) 90 источников развертываются в районе открытой воды (т.е. воды, свободной от плавающих льдин и т.п.) рядом с начальной позицией плана 220 съемки. После развертывания бездействующие отрезки кабелей 95 источников и кабелей 65 сейсмоприемных кос укладываются в соответствующий корпус ледового скега 50. Когда это выполнено, исследовательское судно 30 может входить в покрытые льдом воды. Во всех случаях, исследовательское судно 30 предпочтительно не входит в покрытые льдом воды, пока кабели 65 и 95 не защищены в ледяном скеге 50.
1. Процедуры развертывания
[0086] Различные такелажные оборудования и процедуры могут быть использованы для развертывания и извлечения буксируемого оборудования. Как обсуждалось ниже, сейсмические косы 60 развертываются первыми, а сейсмический источник(и) 90 развертываются после этого. В настоящем обсуждении только одна сейсмоприемная коса 60 обсуждается для развертывания. Развертывание множества кос 60 может использовать одинаковые процедуры для каждой и может дополнительно подразумевать процедуры для индивидуального манипулирования сейсмоприемная косами 60 после развертывания, как раскрыто в объединенных патентных заявках США.
a. Развертывание сейсмоприемной косы
[0087] Хотя развертывание сейсмоприемной косы 60 может использовать некоторые традиционные этапы, развертывание требует соединения буксировочного каната троса и ассоциированных кабелей защитной оболочки, чтобы укладывать сейсмоприемную косу 60 в ледовый скег 50. Как показано на фиг.9A, операторы развертывают сейсмоприемную косу 60 с помощью вводного троса 65 и сдерживающих канатов (не показаны). Операторы соединяют вводной трос 65 с ледовым скегом 50, и ограничитель 67 изгиба на вводном тросе 65 соединяется с фиксированным буксировочным кабелем 62, соединенным с точкой 56 буксировки на скеге 50. Мягкая конструкция 67 буксировки может быть использована между фиксированным буксировочным кабелем 62 и ограничителем 67 изгиба.
[0088] Как показано на фиг.9B, сейсмоприемная коса 60 и вводный трос 65 разматываются, и фиксированный буксировочный кабель 62 ставятся под механическое напряжение посредством разматывания вводного троса 65. Как затем показано на фиг.9C, тянущие тросы 58 соединяются с ограничителями 67 изгиба или "китайскими пальцами" для вводного троса 65, и тянущие тросы 58 используются, чтобы тянуть вводный трос 65 во внутренний канал 52 скега. Ограничители 67 ограничивают угол изгиба на вводном тросе 65 и гибком подводном кабеле, когда они втягиваются в скег 50. Так же, как показано на фиг.9D, вводный трос 65 располагается в скеге 50, чтобы защищаться ото льда, проходящего у борта или под судном 30.
[0089] Как отмечено ранее, позиция развернутой сейсмоприемной косы 60 может управляться множеством способов. Например, глубина сейсмоприемной косы может управляться посредством контроллеров глубины или регуляторов глубины погружения (например, ION 5010 DigiBirds), расположенных с интервалами по длине активной сейсмоприемной косы 60. Горизонтальная позиция сейсмоприемной косы может управляться посредством устройств или регуляторов глубины погружения. Дополнительно, горизонтальная позиция сейсмоприемной косы может быть измерена посредством устройств или регуляторов глубины погружения (например, прикрепленные к сейсмоприемной косе датчики с магнитным компасом ION 5011e), расположенных с интервалами по длине активной сейсмоприемной косы 60.
[0090] Активный хвостовой буй может использоваться или может не использоваться на конце сейсмоприемной косы 60. Однако хвостовой плавучий якорь может быть насажен на хвосте сейсмоприемной косы 60, чтобы поддерживать устойчивость на дальнем конце сейсмоприемной косы 60. Датчики глубины развертываются вдоль сейсмоприемной косы 60, и сейсмоприемная коса 60 балластируется для нейтральной плавучести в начале исследования. Эта балансировка совершается с углами контроллера глубины, заданными в ноль. В то время как в работе сейсмоприемная коса 60 балластируется до предварительно определенной глубины, контроллеры глубины помещаются в сохраняющий глубину режим. Когда условия меняются, углы поворота крыла контроллеров глубины изменяются, чтобы управлять глубиной, и контроллеры глубины сейсмоприемной косы управляются вручную или автоматически в течение времени записи.
b. Развертывание групп источников
[0091] После того как операторы гарантируют, что сейсмоприемная коса(ы) 60 полностью развернуты, и что вводные тросы 65 находятся в канале 52 ледового скега 50, как описано выше, операторы могут начинать развертывать источник(и) 90. Во время развертывания пушки 91 на источнике 90 падают быстро под поверхностью воды, так что они невидимы для большей части развертывания. В конечном счете, кабели 95 источника свободно свисают прямо вниз за судном 30, после того как источники 90 развернуты, и судно 30 поддерживает движение вперед.
[0092] Как отмечено выше на фиг.7, например, судно 30 может использовать два сейсмических источника 90a-b - один на стороне левого борта и другой на стороне правого борта исследовательского судна 30. Процедуры для развертывания каждого из этих источников 90a-b практически одинаковы для обоих. В целом, исследовательское судно 30 использует несколько лебедок для обращения с закрепляющими тросами, воротниками, тросами лебедки, группами пушек и т.п. во время развертывания и извлечения. Закрепляющие тросы, воротники, лебедки и т.п. используются, чтобы травить источник 90a-b на корме судна 30. Поскольку каждый источник 90a-b развертывается отдельно, множество лебедок доступно, чтобы маневрировать одним источником 90a-b. Источник 90a-b полностью развернут, когда достигается предварительно определенная метка на кабеле 95 источника. Также, гибкие подводные кабели и вводный трос 95 источника 90a-b могут быть плотно втянуты в скег 50 для защиты ото льда аналогично процедурам для сейсмоприемных кос 60.
2. Исследование, разрушение льда и расстояния сопровождения
[0093] С помощью развернутого оборудования и исследовательского судна 30, сопровождаемого в покрытые льдом воды ледокольным судном 20, операторы приводят исследовательское судно 30 в начальную точку запланированного маршрута и начинают проводить сейсмическое исследование, как отмечено ранее в блоке 150 на фиг.3. Для этого, ледокольное судно 20 и исследовательское судно 30 проходят запланированный маршрут исследования через покрытый льдом регион. Как отмечено выше, суда 20 и 30 работают вместе как система во льдах, таким образом, суда 20 и 30 работают вместе, используя связь, навигацию, наблюдение и другие системы 310, 320, 340 и т.д., чтобы непрерывно осуществлять навигацию судов 20 и 30 в различных встречающихся ледовых режимах.
[0094] Чтобы физически управлять льдом, поддерживающие суда, такие как ледокольное судно 20 или любое другое сопровождающее судно(а), фрагментируют и/или расчищают потенциально опасные ледовые образования, когда требуется. Поскольку район изменяется динамически и имеет множество потенциальных опасностей и препятствий, операторы постоянно наблюдают за угрозами, управляют льдом, изменяют маршрут, если необходимо, и осуществляют контроль нештатных ситуаций.
[0095] Предпочтительно, встречаемые ледовые режимы имеют не более 10/10 покрытия однолетним льдом, но это может не всегда быть возможным. Например, суда 20 и 30 могут работать в более жестких ледовых режимах, включающих в себя некоторые концентрации многолетнего льда, но суда 20 и 30 предпочтительно избегают сильно торосистого льда, особенно льда, имеющего включения старого льда и льда под давлением. В любом случае, размер ледовых полей, так же как и другие топографические признаки должны наблюдаться и приниматься во внимание при прохождении запланированного маршрута.
[0096] Чтобы поддерживать работу, суда 20 и 30 поддерживаются посредством ледовых и погодных программ, как отмечено выше. Периодические и регулярные ледовые изображения, интерпретации ледовых изображений и погодная информация предоставляются автоматически всем судам 20 и 30 в работе. На тактическом уровне, суда 20 и 30 могут запрашивать специальные спутниковые изображения, и разрешение и интересующий район могут быть подстроены под требования. В дополнение к изображениям или погодным сводкам, профессиональная интерпретация данных может также быть получена из внешних источников.
[0097] Как отмечено ранее, и ледокольное судно 20, и исследовательское судно 30 предпочтительно оснащаются системами 310 навигации во льдах, чтобы осуществлять навигацию по маршруту исследования с помощью изображений или интерпретаций почти в реальном времени с дополнительными наложениями радиолокационных изображений в реальном или почти реальном времени. Дополнительно, каждое судно 20 и 30 может просматривать и использовать изображения в радиолокационном диапазоне частот другого судна 20 и 30. Система 310 навигации во льдах может включать в себя радиолокационные характеристики ледовых препятствий, такие как доступные от Sigma Radar Processing. Это улучшает навигацию во льдах и способность обнаруживать старый лед. Системы 310 навигации во льдах на борту обоих судов 20 и 30 предпочтительно включают в себя признаки радиолокатора ледовых препятствий.
Кроме того, ледовая и погодная информационная обслуживающая программа поддерживает исследовательские операции.
[0098] Во время исследования, GPS-устройства используются, чтобы определять местоположение судов 20 и 30. Традиционные сейсмические практики, связанные с контролем качества GPS, могут быть применены. Например, два независимых навигационных решения предпочтительно используются и сравниваются, чтобы подтверждать позиционирование судов 20 и 30. В частности, точность геодезических измерений в реальном времени навигационных систем 310 может быть подтверждена следующим образом. Точность позиции GPS-спутника определяется посредством ссылки на два критерия, а именно, PDOP (показатель снижения точности определения положения в пространстве) и HDOP (показатель снижения точности определения положения в горизонтальной плоскости). Для PDOP, допустимый предел по любой линии равен 5 (пяти), а общее среднее может быть сконфигурировано, чтобы не превышать 2,5 (два с половиной). Для HDOP эти ограничения равны 4 (четыре) и 1,5 (полтора) соответственно. Различие между позициями основной системы в сравнении с вспомогательной системой, как правило, конфигурируется, чтобы не превышать RMS-значение, равное 5 метрам, обеспечивая обе функциональные системы.
[0099] Для систем 340 сейсмического контроля компасы применяются вдоль сейсмоприемных кос 60. Смоделированная магнитная решетка (WMM или EMM) может быть введена в навигационные системы 310. Затем пространственно изменчивое отклонение для всех компасов на сейсмоприемная косах 60 может быть применено во время пост-обработки данных. Дополнительно, в зависимости от ледовых условий, глубина кабеля сейсмоприемных кос 60 и источников 90 может быть отрегулирована глубже во время работы во льдах, если рассматривается сохранность кабеля, или если кабель принимает на себя случайные удары льда.
[00100] Как типично выполняется, навигационные системы 310 могут быть объединены с другими системами 320 и 340 наблюдения и сейсмического контроля, и от этих систем могут быть записаны первоначальные данные, включающие в себя, но не только, все GPS-позиции (эфемериды и Rinex), направления по курсу, глубины погружения морской сейсмоприемной косы и глубины воды. Временная отметка применяется к записанным данным для более поздней компиляции и анализа.
[00101] Также, чтобы управлять льдом в дополнение к вышеописанным системам, операторы также используют наблюдения за погодой и океаном как в региональных, так и в локальных масштабах, так же как и сводки определенных погодных и морских параметров, и отчеты от судов 20 и 30 о ледовых условиях в локальной области и их работе в этих условиях. Диапазон связанных со льдом вспомогательных действий, которые очерчены выше, реализуется как объединенная система.
[00102] Погодные условия, включающие в себя ветер, видимость, волны, местную погоду и условия волнения моря, могут быть приняты во внимание при оценке ледово-сейсмических работ. Ветер является главной причиной пакового льда, и скорость, направление и переменчивость ветра могут влиять на распределение, концентрацию и перемещение пакового льда на пути исследования. Волны играют значительную роль в отношении размеров и ухудшения ледяного поля. Кроме того, движение льда в волнах, особенно когда противоположно движению судов 20 и 30, может увеличивать силы ударов и, в некоторых ситуациях сильного волнения, могут причинять сильные нагрузки от ударов льда на менее усиленную наружную обшивку корпуса, в частности, выше или ниже ледового пояса.
Ухудшения в видимости вследствие тумана, осадков и темноты могут серьезно ограничивать эффективность операций по управлению льдом и увеличивать зависимость от изображений льда. Чтобы быть эффективными, скорости маневрирования судна, используемые для большинства способов управления паковым льдом, обычно являются высокими.
[00103] Когда суда 20 и 30 движутся вместе в ожидаемых и наблюдаемых условиях, ледокольное судно 20 проламывает путь для исследовательского судна 30 в условиях пакового льда, когда исследовательское судно 30 проводит исследование. Как будет оценено, исследовательское судно 30 не задействуется во льду по корме, поскольку ледовый скег 50 может быть поврежден. Поэтому ледокольное судно 20 проламывает путь для исследовательского судна 30, таким образом, исследовательское судно 30 способно постоянно двигаться со скоростью исследования по маршруту исследования.
Поскольку исследовательское судно 30 должно продолжать осуществлять продвижение вперед, когда буксирует сейсмоприемные косы 60 и источники 90 и получает данные, сопровождающее ледокольное судно 20 должно выполнять контроль за ледовой обстановкой эффективно, в то же время поддерживая близкие и непрерывные связи с исследовательским судном 30.
[00104] Когда суда 20 и 30 проходят маршрут, например, операторы осуществляют контроль за ледовой обстановкой с помощью обмена данными и командного подхода. Различный персонал на обоих судах 20 и 30 поддерживает контакт друг с другом, чтобы управлять льдом и выполнять принятие переменчивого решения и совместные роли в зависимости от ледовых условий. В частности, команда контроля за ледовой обстановкой возглавляется ответственным за ледовую обстановку на исследовательском судне 30. Команда также включает в себя капитанов обоих судов 20 и 30, так же как и двух ледовых лоцманов на борту ледокольного судна 20.
[00105] Команда поддерживает открытые и непрерывные обмены данными на протяжении всего исследования, чтобы определять рекомендованные районы операции и просматривать ледовые условия. Ответственный за ледовую обстановку, в консультации с другими, рекомендует выбор запланированных путей исследования и какие-либо модификации первоначального плана съемки. Кроме того, в любой момент во время операции, любой член команды по контролю за ледовой обстановкой может иметь полномочие прекращать ход исследования вследствие встреченных фактических ледовых условий. Ответственный за ледовую обстановку также дает рекомендации о погружении сейсмоприемных кос 60 для защиты ото льда.
[00106] Во время проведения сейсмической операции расстояние сопровождения между ледокольным судном 20 и исследовательским судном 30 может быть первоначально запланировано. Чтобы уменьшать сейсмический шум, расстояние сопровождения является настолько большим, насколько обстоятельства реалистически позволяют без подвергания риску безопасности операции. Ледокольное судно 20, в целом, расчищает путь для исследовательского судна 30, в то же время компенсируя расстояние сопровождения и направление и дрейф льда. Подразумеваемая постоянная связь между судами 20 и 30 может максимизировать эффективность этого.
[00107] В любом случае, уровни шума во время работы во льдах и, в то же время, в близком сопровождении с ледокольным судном 20 будут неограниченными вследствие неизвестных шумовых профилей льда, увеличенной или неизвестной сейсмоприемной косы и акустических сигнатур судна во время толкания льда и традиционно высоких уровней шума, создаваемых ледокольным судном 20. Когда суда 20 и 30 движутся, расстояние между ледокольным судном 20 и исследовательским судном 30 поэтому наблюдается, чтобы сохранять предпочтительное расстояние для того, чтобы минимизировать шум, который может мешать исследовательским данным. В целом, предпочтительно поддерживать расстояние сопровождения в три кабельтовых или более, чтобы смягчать проблемы с шумом, когда ледокольное судно 20 обращается со льдом.
[00108] Временами, могут существовать условия во льдах, которые требуют от ледокольного судна 20 диапазона в несколько миль впереди исследовательского судна 30. В других ледовых режимах ледокольному судну 20 может быть необходимо иметь дело лишь с полосами, небольшими участками и аналогичными концентрациями льда впереди исследовательского судна 30, и он может поддерживать более короткое расстояние сопровождения впереди исследовательского судна 30. Кроме того, суда 20 и 30 должны работать с расстояниями, которые будут предохранять исследовательское судно 30 от остановки во льдах, таким образом, расстояние сопровождения может изменяться во время операций.
[00109] В отличие от строгих коммерческих ледокольных сопровождений, когда вся работа управляется ледокольным судном 20, управление сейсмической операцией должно быть разделено между двумя судами 20 и 30. Как отмечено выше, например, конкретное расстояние сопровождения может требоваться между исследовательским судном 30 и ледокольным судном 20, чтобы уменьшать шумовую помеху и другие неблагоприятные воздействия. Операторы на исследовательском судне 30 лучше подходят для наблюдения за этим расстоянием. Поскольку им необходимо также поддерживать скорость исследования, им может быть необходимо постоянно передавать ледокольному судну 20 необходимость увеличить расстояние сопровождения ледокольного судна от следующего за ним исследовательского судна 30.
[00110] С другой стороны, исследовательское судно 30 также должно сообщать ледовые условия, которые оно встречает во время следования за ледокольным судном 20, например, сообщать встречаемые ледовые нагрузки, глетчерный лед и т.д. Ледокольное судно 20 может затем изменять свои действия, чтобы улучшать условия, встречаемые исследовательским судном 30, ломая и рассеивая лед по-другому.
[00111] В то же время, ледокольное судно 20 постоянно рассматривает лед впереди и должно сохранять полную резервную мощность, доступную в случае встречи сильных гряд или полей торосов. Это может означать, что ледокольное судно 20 движется порой с помощью своего центрального винта задним ходом, чтобы принимать меры по управлению энергией. Исследовательское судно 30 аналогично поддерживает полную резервную мощность, подготовленную, чтобы осуществлять успешную навигацию во время сопровождения.
3. Контроль за ледовой обстановкой
[00112] Как обсуждалось ранее, суда 20 и 30 осуществляют контроль за встречающейся ледовой обстановкой по плану съемки. Контроль за ледовой обстановкой является сложным вопросом вследствие затронутых динамических факторов, таких как возможности поддерживаемого исследовательского судна 30, возможности используемого поддерживающего судна 20 и различные ледовые условия, которые могут встретиться. Например, паковый лед и паковый лед, имеющий как старый лед, так и глетчерный лед, могут встречаться в различных концентрациях в районе исследований. Поэтому исследовательские операции в районе планируются и выполняются так, что возможности судов 20 и 30 не превышаются. Для этого ледовые условия впереди судов 20 и 30 всесторонне определяются заранее, как отмечено ранее, но ледовые условия также наблюдаются во время исследования, как отмечено в данном документе, так что ледокольное судно 20 и исследовательское судно 30 могут согласовывать условия без прекращения работ из-за льда. Подробная информация о льде требуется, чтобы поддерживать этот подход. Как отмечено в данном документе, требуемая информация получается из различных ледовых карт, сводок о давлении льда, анализа дрейфа льда, сводок и изображений, включающих в себя изображения высокого разрешения вплоть до разрешения 100-150 м.
[00113] Суда 20 и 30 избегают тяжелого пакового льда и, когда необходимо, работают с медленными скоростями продвижения согласно окружающим ледовым условиям. Когда условия предоставляют возможность, суда 20 и 30 могут осуществлять контроль за ледовой обстановкой, разламывая или отводя паковый лед, движущийся по направлению к трассе исследования, чтобы эффективно защищать исследовательское судно 30 и буксируемое оборудование от приближающегося льда. Чтобы справляться с паковым льдом, ледокольное судно 20 агрессивно ломает лед с большими скоростями, особенно если дрейф льда быстрый, и затопляемые элементы пакового льда являются крупными или плохо определенными. Также, ледокольному судну 20 может быть необходимо толкать большие плавающие льдины с большой мощностью.
[00114] Хотя встречаемые характеристики могут быть очень динамичными по природе, некоторые ключевые соображения по контролю за ледовой обстановкой могут быть очерчены. Когда используется в данном документе, контроль за ледовой обстановкой ссылается на требуемые поддерживающие действия, таким образом исследовательское судно 30 может поддерживать свой маршрут по трассе исследования и продолжать операции в движущемся льде. Например, контроль за ледовой обстановкой включает в себя следующий диапазон задач, все из которых предназначены, чтобы повышать безопасность и эффективность исследовательских операций во льдах: наблюдение и прогнозирование льда; обнаружение и отслеживание ледовых препятствий; предупреждение о ледовой опасности и руководство ледовой командой; и разрушение льда и/или расчистка (включающая в себя буксировку айсбергов), когда требуется, чтобы физически уменьшать угрозу потенциально опасных или функционально ограничивающих ледовых взаимодействий с судном 30.
[00115] Посредством тщательного контроля ледовой обстановки ледокольное судно 20 пытается изменять ледовое окружение впереди по маршруту исследовательского судна 30. Ледокольное судно 20 устраняет опасные или ограничивающие взаимодействия пакового льда от исследовательского судна 30 и его буксируемого оборудования (60, 90 и т.д.). При контроле за ледовой обстановкой ледокольное судно 20 уменьшает ледовые нагрузки на исследовательское судно 30, таким образом, исследовательское судно 30 может непрерывно осуществлять навигацию и придерживаться пути исследования. Выполняя это, ледокольное судно 20 расчищает паковый лед вокруг исследовательского судна 30, в то же время не запутываясь в исследовательском оборудовании (60, 90 и т.д.).
[00116] Контроль за ледовой обстановкой может быть разделен на две основные процедуры, которые включают в себя разрушение льда и разгон льда. При разрушении льда ледокольное судно 20 ломает большие плавающие ледяные поля или высокие концентрации мобильного пакового льда на небольшие куски. Получающийся в результате разбитый лед может затем протекать вокруг корпуса исследовательского судна, в то время как ледовый скег 50 защищает развернутые кабели и тросы для сейсмоприемных кос 60 и источников 90. Этот также уменьшает ледовые нагрузки на исследовательское судно 30. При разгоне льда поддерживающее судно 20 ломает и разбрасывает большие плавающие ледяные поля, используя высокоскоростные маневры и/или отбрасываемую винтом струю.
[00117] Различные схемы разламывания льда могут быть использованы, чтобы расчищать лед, так что исследовательское судно 30 может проходить маршрут исследования. Как показано на фиг.10A-10D, эти схемы включают в себя линейную, секторальную, круговую и толкающую методики, используемые в перемещении пакового льда. В дополнение к этим методикам существует множество вариаций и комбинаций, которые эффективны в определенных ледовых условиях. Вариации и комбинации этих методик вместе с традиционными методиками сопровождения ледокольным судном могут быть приведены в действие текущим ледовым режимом и из других соображений.
[00118] Как показано на фиг.10A, линейная методика является схемой разрушения льда, используемой сопровождающим судном 20, чтобы ломать паковый лед, дрейфующий впереди исследовательского судна 30, по прямым линиям, параллельно направлению дрейфа льда. Эта схема разрушения льда типично используется, когда скорость дрейфа льда является быстрой, а направление дрейфа льда остается вполне постоянным.
[00119] Как показано на фиг.10B, секторальная методика является схемой разрушения льда, которая обеспечивает широкий охват контролируемого пакового льда вокруг направления дрейфа приближающегося льда. Этот технический прием требует, чтобы сопровождающее судно 20 ходило назад и вперед через линию дрейфа между двумя назначенными курсами по компасу, которые создают сектор. Эта схема типично используется, когда скорость дрейфа льда является низкой, и/или когда направление дрейфа переменчиво или быстро изменяется.
[00120] Как показано на фиг.10C, методика кругового разламывания льда является процедурой, которая требует, чтобы сопровождающее судно 20 ходило в круговой схеме впереди исследовательского судна 30. Диаметр кругов будет изменяться со скоростью дрейфа льда и маневренностью и скоростью исследовательского судна 30. Эта схема типично используется в высоких концентрациях тонкого льда или толстых плавучих льдин небольшого диаметра, и когда направление дрейфа льда переменчиво. Круговая схема может также выполняться полностью вокруг исследовательского судна 30 в качестве эффективного способа, чтобы ослаблять давление льда, предусмотренные сейсмоприемные косы 60 и другое развернутое оборудование 90 не сталкиваются с ним.
[00121] Как показано на фиг.10D, толкание льда является эффективным способом устранения средних и больших плавающих ледяных полей с линии дрейфа. Направление толкания обычно находится под прямыми углами к приближающемуся льду. Преимуществом толкания большого плавающего ледяного поля вместо его разламывания является то, что угроза устраняется с линии дрейфа и от исследовательского судна 30, тогда как если лед ломается впереди, разломанные обломки могут все еще представлять угрозу. Поэтому технический прием должен правильно прогнозировать какое-либо изменение в дрейфе льда, чтобы гарантировать, что лед не будет становиться угрозой позднее.
[00122] В дополнение к паковому льду глетчерный лед может также представлять угрозу исследовательскому судну 30 в районе исследований. Если эта ситуация возникает, исследование может быть необходимо остановить, когда айсберг представляет неприемлемый риск для исследовательского судна 30 или сейсмических кос 60. В частности, направление и дрейф айсберга могут отличаться от окружающего ледового поля, поскольку айсберг приводится в движение течениями, в то время как паковый лед имеет тенденцию приводиться в движение силами ветра.
[00123] Небольшие ледяные куски, отрывающиеся от основного айсберга, такие как гроулеры и крупные несяки, могут также быть в окружающем районе. В некоторых обстоятельствах эти небольшие куски льда может быть трудно идентифицировать в паковом льду, особенно в условиях плохой видимости. Любой контакт, осуществляемый судном 30 с низким классом льда, может приводить в результате к серьезным повреждениям.
4. Направление, дрейф и отклонение
[00124] Поскольку предложенный маршрут исследования проходит через лед, движущийся в воде, маршрут ледокольного судна 20 учитывает направление и дрейф льда относительно исследовательского судна 30 и трассы исследования в случае необходимости. Например, маршрут для ледокольного судна 20 может изменяться в диапазоне от почти без отклонения ледокольного судна 20 от трассы исследования в процессе близкого сопровождения до большего отклонения при расположении дальше вперед или в сторону. В то время как суда 20 и 30 работают, поддерживаются близкие связи, и в то же время операторы уделяют внимание преобладающим и вероятным ледовым условиям. Когда они движутся по маршруту, оба судна 20 и 30 также управляют своей резервной тяговой мощностью, чтобы гарантировать, что мощность непосредственно доступна, если сильные торосы или другие ледовые образования требуют немедленных увеличений в мощности, чтобы ломать лед (без прекращений работы).
[00125] Предпочтительно, исследовательское судно 30 не отклоняется от запланированной трассы исследования, таким образом, желаемые сейсмические данные могут быть получены. Кроме того, отклонения от трассы исследования могут возникать при необходимости вследствие ледовых условий. При отклонении от трассы исследования небольшие изменения в маршруте предпочтительно выполняются в начале отклонения. Например, скорости поворота приблизительно 3-4 градуса в минуту предпочтительно выполняются в начале отклонения курса исследовательского судна 30, поскольку более быстрые изменения могут нарушать получение данных. Конечно, резкое изменение в направлении может, в конечном счете, быть необходимым, чтобы предотвращать повреждение и избегать остановки во льдах.
[00126] При переходе исследования с одного маршрута на другой сейсмические косы 60 предпочтительно приводятся в движение до предварительно определенной глубины, чтобы уменьшать риски встречи со льдом и помогать переходу на следующую трассу. Погружение сейсмоприемных кос 60 выполняется даже в однолетнем льду, который является практически плоской поверхностью, поскольку всегда существует вероятность того, что лед с глубоким килем присутствует и остался незамеченным.
[00127] В одном примере сейсмическая коса 60 может обычно быть развернута на -28 м. Кроме того, кили льдов могут протягиваться вплоть до -35 м в некоторых случаях. Поэтому погружение сейсмоприемной косы 60 глубже приблизительно до -55 м может уменьшать риск зацепления сейсмоприемной косой 60 глубокого киля льда. Как отмечено выше, глубина -55 м предполагает глубину исследования -28 м. Если используется меньшая глубина исследования, такая как -20 метров, тогда опасные ледяные кили могут быть более редкими, и высоты надводной части могут тогда считаться приемлемыми, когда равны только 4 метрам. Сейсмический источник 90 должен соответствующим образом управляться во время изменения трасс всякий раз, когда возможно, так что извлечения и повторного развертывания пушки в тяжелом льду можно избегать.
[00128] Направление и дрейф пакового льда, айсбергов и отдельных плавающих льдин постоянно определяются с помощью ручных и ARPA радиолокационных способов отображения данных на карте, навигации во льдах и других целесообразных способов, чтобы поддерживать постоянный журнал встречаемого направления и дрейфа. В свою очередь, направление и дрейф льда определяет смещение ледокольного судна 20 и идентифицирует интересующие ледовые образования. Поскольку исследовательское судно 30 буксирует сейсмоприемные косы 60, которые могут быть до 6 км длиной, ледовые образования впереди по курсу трассы исследования и маршрута ледокольного судна особенно интересны. Во время сопровождения сектор поддерживается, чтобы уменьшать риск ледяных килей, которые могут ударять сейсмические косы 60.
[00129] Как отмечено выше, паковый лед имеет тенденцию приводиться в движение как течением, так и ветром, в то время как айсберги имеют тенденцию приводиться в движение большей частью течением. Плавающие ледяные поля, состоящие из старых торосов, могут быть менее прогнозируемыми вследствие их характеристик надводной части и киля. Эти вариации обычно поддерживаются для более коротких периодов времени, но лед этого типа в открытых паковых условиях оправдывает дополнительную осторожность. Поскольку исследовательское судно 30 буксирует сейсмоприемную косу до 6 км длиной с относительно низкими скоростями (4,6 узла или меньше), и при обычной глубине исследования -28 м, сейсмоприемная коса 60 может флюгировать вследствие океанских течений, встречаемых на этой глубине, которые отличны от течений на поверхности океана.
[00130] Запасы безопасности могут не быть однозначно измерены на основе расстояния, поскольку пределы могут фактически зависеть от многих факторов, включающих в себя достоверность информации о направлении и дрейфе, вероятность ледовых килей, составляющих истинные риски, скорость исследовательского судна 30, вероятность того, что исследовательское судно 30 должно замедлять ход в направлении льда, прежде чем элемент риска не будет полностью очищен, и т.д. Как следствие, запасы безопасности будут изменяться согласно скрытым обстоятельствам. Это будет обычно предметом для непрерывной оценки и определения операторами.
[00131] Чтобы оценивать запасы безопасности, существует соотношение между высотой надводной части гряды торосов в паковом льду и глубиной киля для этой гряды торосов. Для сильных торосов глубина киля приблизительно до 4 раз больше высоты надводной части. Предпочтительно, запас безопасности 20% может быть применен, когда операторы наблюдают гряду торосов с конкретной высотой гряды. Следовательно, операторы могут считать многолетние гряды торосов с высотой надводной части 5,6 м и выше как максимальную высоту надводной части, допустимую поверх буксируемой сейсмоприемной косы 60.
[00132] С учетом этих соображений обсуждение обращается к фиг.11, где показано ледокольное судно 20, проламывающее путь для исследовательского судна 30, движущегося по трассе исследования. Ледокольное судно 20 проламывает маршрут, смещаясь для направленности и дрейфа льда. Таким образом, расчищенный маршрут будет пролегать по линии исследования, когда исследовательское судно 30 достигает этой точки на основе скорости исследовательского судна и направления и дрейфа льда. Угловое соотношение между трассой исследования и ледокольным судном 20 называется углом смещения.
[00133] Ледовые образования, дрейфующие впереди (т.е. выше по ходу трассы исследования в дрейфе плавающего ледового поля), тщательно оцениваются, чтобы гарантировать отсутствие глубоких килей поперек сейсмической косы (не показана), буксируемой позади исследовательского судна 30, после того как эти образования достигли трассы исследования и возможно прошли над буксируемой сейсмоприемной косой. Это может быть выражено как линия киля минимальной глубины, как показано на фиг.11. В качестве дополнительной предосторожности, линия коэффициента безопасности глубокого киля может также быть вычислена с помощью скоростей дрейфа, которые преднамеренно увеличиваются от фактических наблюдаемых скоростей дрейфа. Когда глубокие кили лежат внутри этой линии, суда 20 и 30 предпринимают соответствующие действия.
[00134] Чтобы избегать льда с глубоким килем, когда флюгирование присутствует в сейсмоприемной косе 60, операторы принимают во внимание направление флюгирования, чтобы изменять курс исследовательского судна 30 и сейсмоприемной косы 60 вокруг опасного глубокого киля. Как показано на фиг.12A, например, операторы изменяют направление исследовательского судна 30 на направление флюгирования сейсмоприемной косы, когда лед с глубоким килем лежит впереди на линии исследования. Это приводит флюгерное положение в один ряд с исследовательским судном 30, когда оно проходит опасный глубокий киль. Исследовательское судно 30 может затем возобновлять свой курс по линии исследования, когда это безопасно выполнять.
[00135] В некоторых ситуациях, однако, исследовательское судно 30 не может поворачивать в направлении флюгерного положения, поскольку дополнительные риски лежат в этом направлении. В этом случае, как показано на фиг.12B, операторы поворачивают исследовательское судно 30 так, что его направление находится на одной линии с флюгерным положением. Судно 30 поддерживает этот курс, пока сейсмоприемная коса 60 не будет свободна от риска.
[00136] Даже при исследовании и принятии во внимание направления и дрейфа льда и каких-либо ледовых килей, исследование может все еще встречать лед со значительными топографическими элементами рельефа. Эти ледовые образования избегаются всякий раз, когда возможно, поскольку они означают районы во льдах, которые более тяжело ломать. Поля торосов и другие образования старого льда предпочтительно также избегаются. Дополнительно, лед может быть встречен со значительным снежным покровом, который может в значительной степени способствовать трудности навигации, поскольку снег увеличивает коэффициент трения между льдом и корпусами судов.
F. Конфигурации пополнения запасов и непредвиденные нештатные ситуации
[00137] Исследование проводится в неблагоприятных ледовых средах в Арктике удаленно от пунктов обеспечения, так что соблюдаются некоторые операции общего поля. Поскольку ледокольное судно 20 может быть с атомной силовой установкой, он может не требовать пополнения расхода топлива во время всей операции. Исследовательское судно 30, если снабжается судовым маловязким топливом (MGO), несет достаточный запас для работы с помощью резервной емкости. В большинстве случаев суда 20 и 30 не способны двигаться по кругу из-за отказов системы вследствие ледового покрова. Кроме того, весьма маловероятно, что источники 90 или сейсмоприемной косы 60 могут быть извлечены или повторно развернуты во время нахождения во льдах.
[00138] Во время контроля за ледовой обстановкой в исследовании могут быть встречены ледовые условия, когда безопасность сейсмоприемной косы 60 находится под угрозой. Когда это происходит, суда 20 и 30 направляются в воды, где ледовые условия позволят извлекать сейсмоприемные косы 60. Как только находятся в таком местоположении, сейсмоприемные косы 60 укорачиваются до 600 м или менее, и последующая исследовательская работа может затем продолжаться с уменьшенной длиной сейсмоприемной косы.
[00139] Например, угрожающие ледовые условия могут возникать, когда морские ледовые условия являются опасно хребтообразными с оцененными высотами надводной части, равными 5,6 метра или больше, или хребтообразными с высотами надводной части, превышающими 4,5 метра или больше, в течение продолжительного периода времени, так что любой результирующий ледовый инцидент вынудит судно 30 двигаться к меньшему ледовому режиму, чтобы иметь возможность извлекать или повторно развертывать сейсмическое оборудование. Угрожающие ледовые условия могут также возникать, когда один или более ударов льда происходят по сейсмоприемной косе 60, или когда произошла значимая или катастрофическая потеря сейсмоприемной косы 60 и/или другого оборудования в воде. Определение угрожающего ледового условия может быть основано на визуальных наблюдениях, так же как и интерпретациях спутниковых изображений, ледовых карт и т.д., даже когда видимость может быть ухудшена снегом или туманом.
[00140] Несмотря на усилия команды по контролю за ледовой обстановкой и доступное оборудование для навигации во льдах, сейсмоприемная коса 60 может отрываться от исследовательского судна 30, или может быть необходимо отделять сейсмоприемную косу 60 преднамеренно от исследовательского судна 30. Поскольку сейсмоприемная коса 60 находится в ледяном поле, встречаются определенные логистические проблемы, которые отличаются от обычных сейсмических операций.
[00141] Когда сейсмоприемная коса 60 потеряна или отделена, об этом сообщается ледокольному судну 20, таким образом, он не плывет поверх сейсмоприемной косы 60. Операторы укладывают все оборудование в море на борт и выполняют поиск потерянной сейсмоприемной косы 60. Наиболее открытый морской район проверяется первым и типично на полпути в направлении сейсмоприемной косы 60 или даже далее назад.
[00142] Если сейсмоприемная коса 60 не может быть локализована немедленно, исследовательское судно 30 не плывет вокруг, чтобы пытаться сломать лед, поскольку это может дополнительно повредить сейсмоприемную косу 60. Вместо этого морской нанос наблюдается на предмет естественного разлома льда, таким образом, исследовательское судно 30 может использовать естественный разлом для маневра. После того как сейсмоприемная коса 60 локализована, и полагается безопасным спускать на воду рабочую шлюпку, извлечение сейсмоприемной косы 60 может выполняться.
[00143] Несмотря на попытки команды по контролю за ледовой обстановкой и доступное оборудование для навигации во льдах, могут быть моменты при исследовании во льдах, когда исследовательское судно останавливается окружающим льдом. Исследовательское судно 30 может быть остановлено во льдах вследствие поломки, ледовых условий или других причин. Если судно 30 останавливается в то время, когда морское оборудование развернуто, кабели для сейсмоприемной косы 60 и группы 90 источников могут быть затянуты на винт и повреждены. Чтобы минимизировать возможности этого, операторы следуют установленным процедурам.
[00144] Когда исследовательское судно 30 останавливается, операторы немедленно оповещаются. Ледокольное судно 20 и любые другие суда поблизости могут начинать пытаться высвободить из льда исследовательское судно 30, но ориентация ледокольного судна 20 по отношению к сейсмическим косам 60 наблюдается, чтобы избегать задевания сейсмоприемных кос 60. Когда исследовательское судно 30 останавливается, значительная кинетическая энергия сейсмоприемной косы 60 будет вынуждать ее продолжать двигаться вперед, несмотря на усилия, применяемые, чтобы смягчать это, такие как использование регуляторов глубины погружения и множества digiFin и т.д.
[00145] Если сначала распознается, что исследовательское судно 30 будет физически остановлено льдом, прокладка маршрута вдоль трассы исследования может быть преимущественно завершена, и скорость транспортного средства может быть медленно уменьшена. Пост наблюдения может быть размещен посредством кормового барабана со связью с мостиком. Если время позволяет, начинается извлечение пушек сейсмического источника 90. После того как источники 90 находятся на носовой части судна 30, передняя часть вводного троса на сейсмоприемная косах 60 может быть извлечена, и извлечение вводного троса и подгрупп продолжается до тех пор, пока все тяжелое оборудование не будет на борту. Когда извлечение сейсмоприемной косы продолжается, оборудование извлекается медленно, чтобы гарантировать, что провисшая часть не дрейфует под судно 30, в то время как регуляторы глубины погружения и крылья снимаются.
[00146] Ледокольное судно 20 может также быть использовано, чтобы проламывать маршрут эвакуации исследовательского судна 30. Если исследовательское судно 30 останавливается из-за льда, например, ледокольное судно 20 может высвобождать судно 30 и возобновлять близкое сопровождение в некоторых случаях. Однако маневры ледокольного судна необходимо наблюдать с тем, чтобы не задеть сейсмоприемную косу 60. Система навигации во льдах и позиционирования сейсмоприемной косы может отображать форму и позицию сейсмоприемной косы, что полезно в таких обстоятельствах.
[00147] Отказ пушки на источнике 90 может делать необходимым извлечение источника 90 для технического обслуживания. Источник 90 может быть извлечен во льдах, в то же время оставляя сейсмические кабели сейсмоприемных кос 60 защищенными. В свете ледовых условий восстановленный источник 90 может затем быть повторно развернут, и гибкий подводный кабель снова уложен в защитный ледовый скег 50.
[00148] При работе с каким-либо из кабелей во льдах, контакт кабелей с плавающими ледяными полями или фрагментами может вызывать непреднамеренные перемещения кабелей и оборудования на палубе. Кроме того, ледовое поле или фрагмент, после того как оказался под сейсмической косой, может проходить под отрезком сейсмоприемной косы и вызывать значительное повреждение.
[00149] Приведенное выше описание предпочтительных и других вариантов осуществления не предназначено, чтобы ограничивать или стеснять рамки или применимость изобретенных концепций, задуманных заявителями. Будет понятно с пользой настоящего изобретения, что признаки, описанные выше в соответствии с каким-либо вариантом осуществления или аспектом раскрытого предмета изучения, могут быть использованы, либо отдельно, либо в комбинации с каким-либо другим описанным признаком, в каком-либо другом варианте осуществления или аспекте раскрытого предмета изучения.
[00150] Взамен раскрытия изобретенных концепций, содержащихся в данном документе, заявители желают все патентные права, позволяемые прилагаемой формулой изобретения. Следовательно, предполагается, что прилагаемая формула изобретения включает в себя все модификации и изменения в полной мере, в какой они подпадают под рамки последующей формулы изобретения или ее эквивалентов.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОРСКАЯ СЕЙСМОРАЗВЕДКА В ПОКРЫТЫХ ЛЬДОМ ИЛИ ИМЕЮЩИХ ПРЕПЯТСТВИЯ ВОДАХ | 2010 |
|
RU2487374C2 |
| МОРСКАЯ СЕЙСМОРАЗВЕДКА В ПОКРЫТЫХ ЛЬДОМ ИЛИ ИМЕЮЩИХ ПРЕПЯТСТВИЯ ВОДАХ | 2013 |
|
RU2570428C2 |
| КОМПЕНСАЦИЯ СКЛОНЕНИЯ ПРИ СЕЙСМИЧЕСКИХ РАЗВЕДКАХ | 2012 |
|
RU2557361C2 |
| МОРСКАЯ СЕЙСМОРАЗВЕДКА С ИСПОЛЬЗОВАНИЕМ БУКСИРУЕМЫХ КОМПОНЕНТОВ, НАХОДЯЩИХСЯ НИЖЕ ПОВЕРХНОСТИ ВОДЫ | 2015 |
|
RU2672044C2 |
| УСТРОЙСТВО ДЛЯ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ | 2016 |
|
RU2621272C1 |
| НАУЧНО-ИССЛЕДОВАТЕЛЬСКОЕ ЛЕДОКОЛЬНОЕ СУДНО ДЛЯ ПРОВЕДЕНИЯ СЕЙСМОРАЗВЕДКИ ПО 3D ТЕХНОЛОГИИ В АРКТИЧЕСКИХ МОРЯХ ВНЕ ЗАВИСИМОСТИ ОТ ЛЕДОВЫХ УСЛОВИЙ | 2015 |
|
RU2595048C1 |
| СПОСОБ ПОДВОДНОЙ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ | 2016 |
|
RU2621638C1 |
| СИСТЕМА МОНИТОРИНГА И ЗАЩИТЫ ОТ МОРСКОЙ УГРОЗЫ | 2012 |
|
RU2549153C1 |
| СПОСОБ ПРОВЕДЕНИЯ ПОДВОДНО-ПОДЛЕДНОЙ СЕЙСМОАКУСТИЧЕСКОЙ РАЗВЕДКИ С ИСПОЛЬЗОВАНИЕМ ЛЕДОКОЛЬНОГО СУДНА И КОМПЛЕКСА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2562747C1 |
| СЕЙСМОГРАФИЧЕСКОЕ СУДНО ДЛЯ ПРОВЕДЕНИЯ СЕЙСМОРАЗВЕДКИ В АРКТИЧЕСКИХ МОРЯХ ВНЕ ЗАВИСИМОСТИ ОТ ЛЕДОВЫХ УСЛОВИЙ | 2015 |
|
RU2589242C1 |

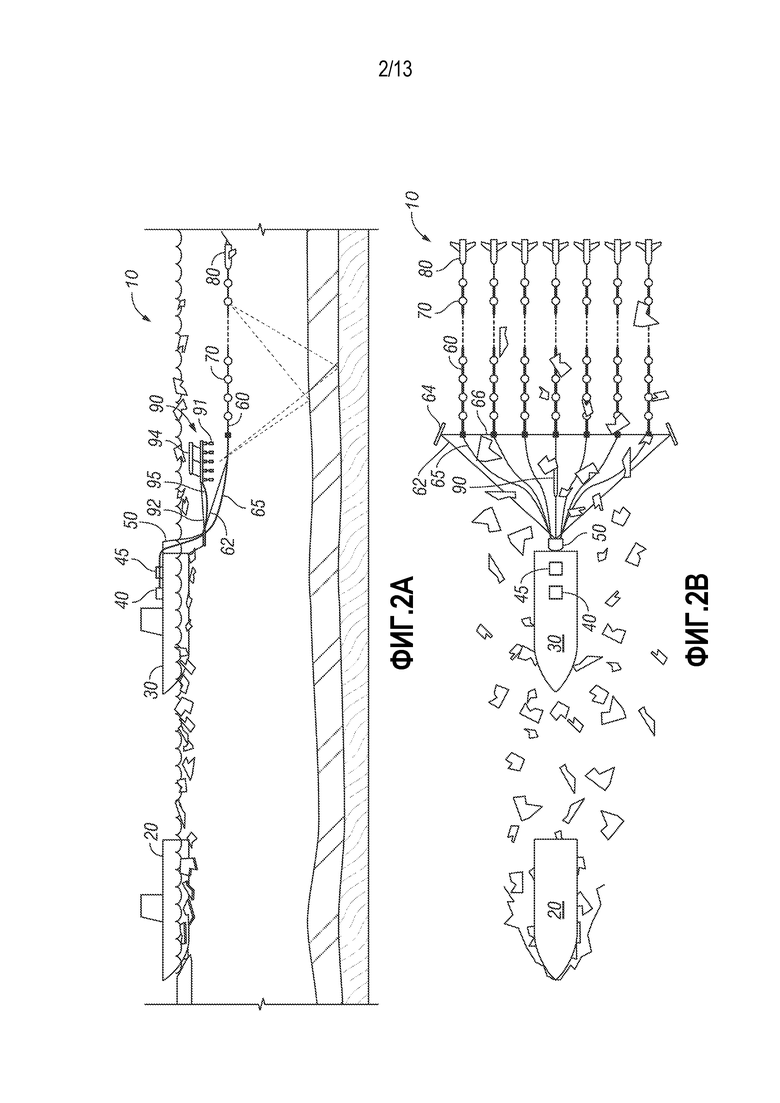



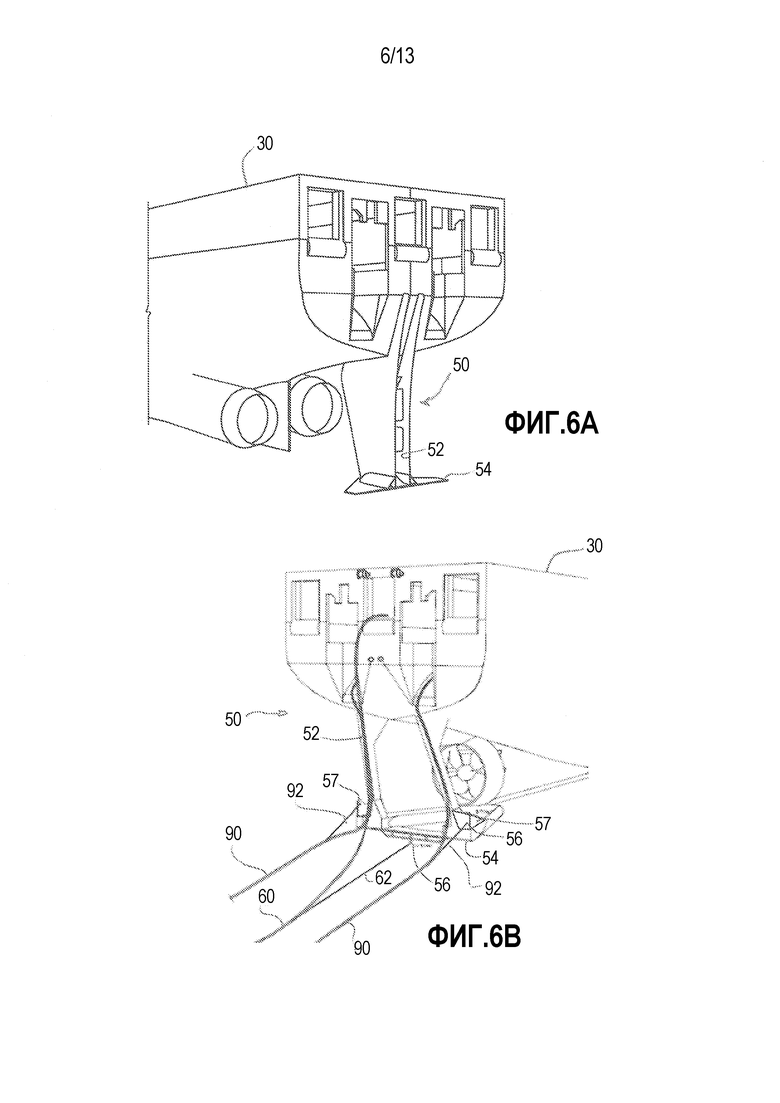

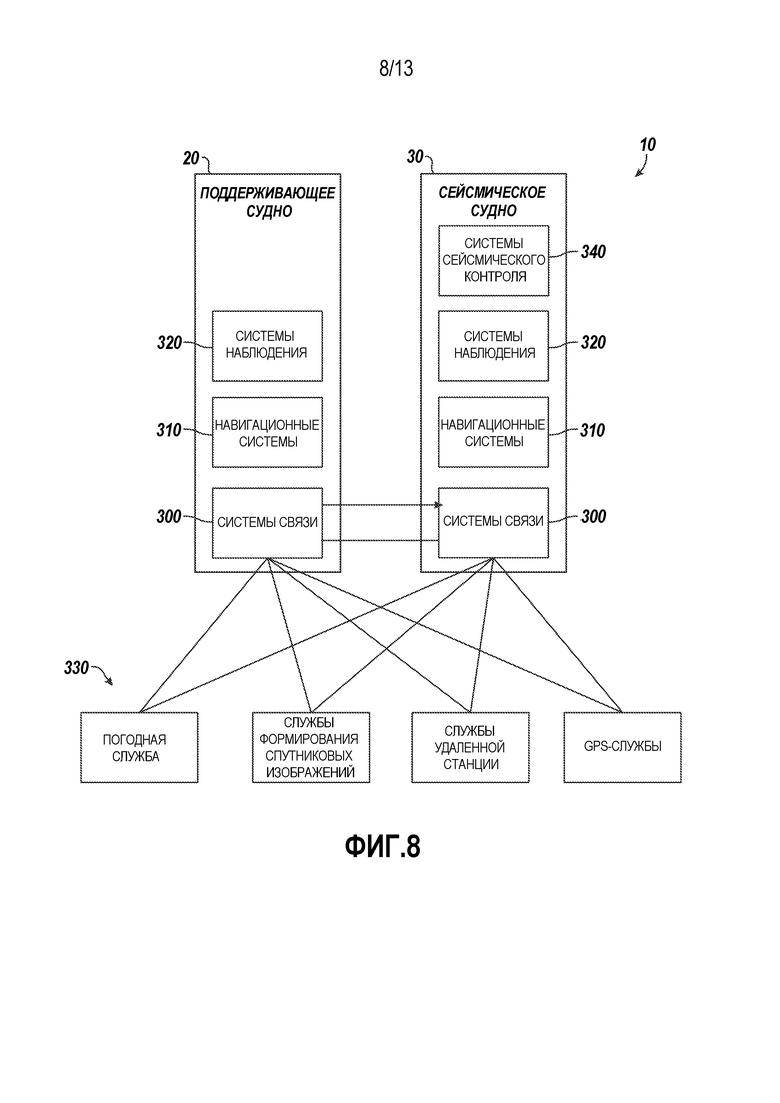

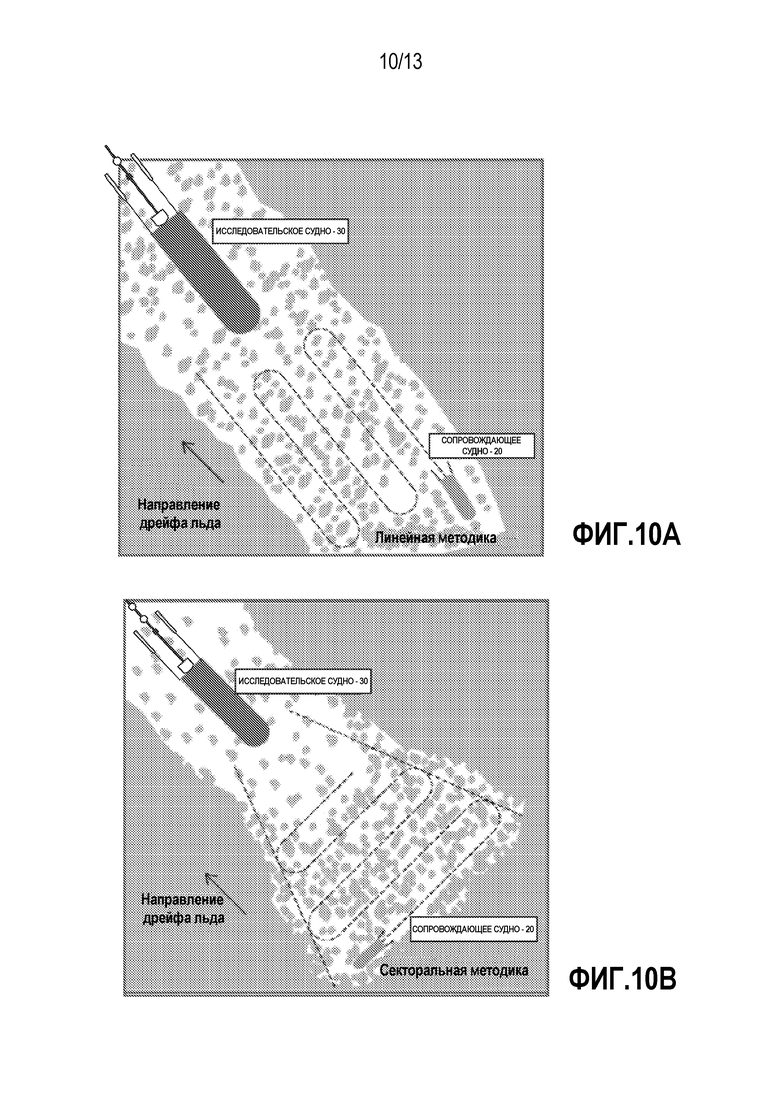
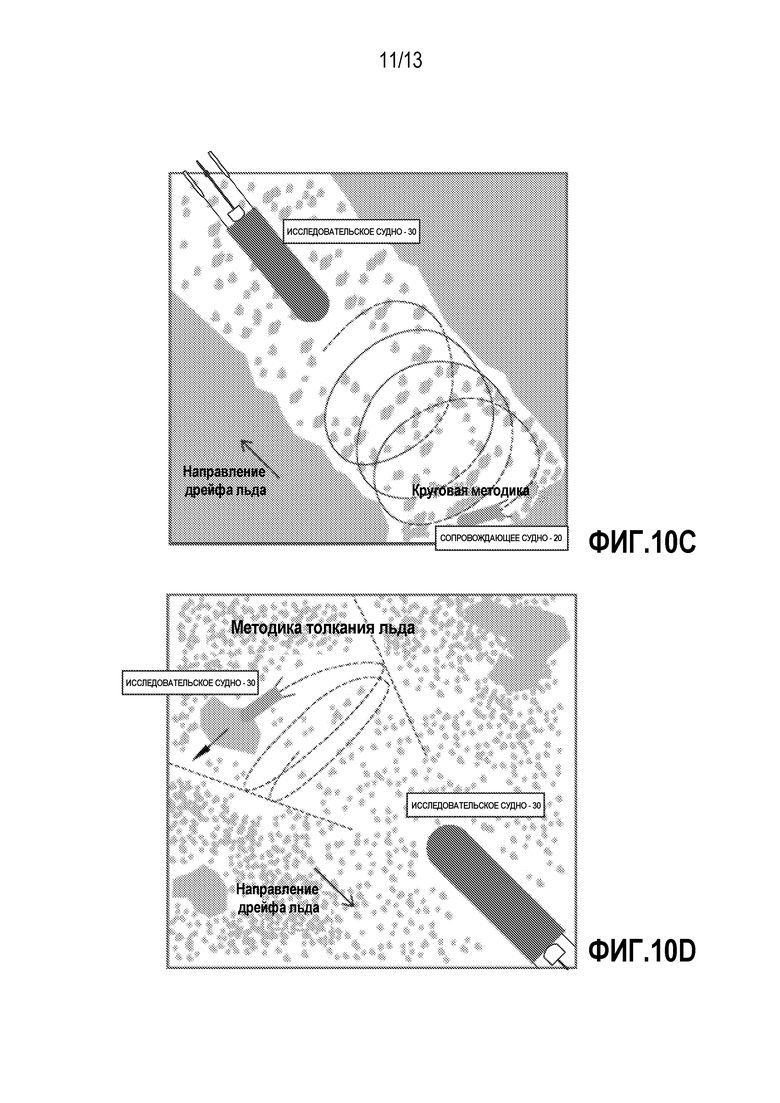
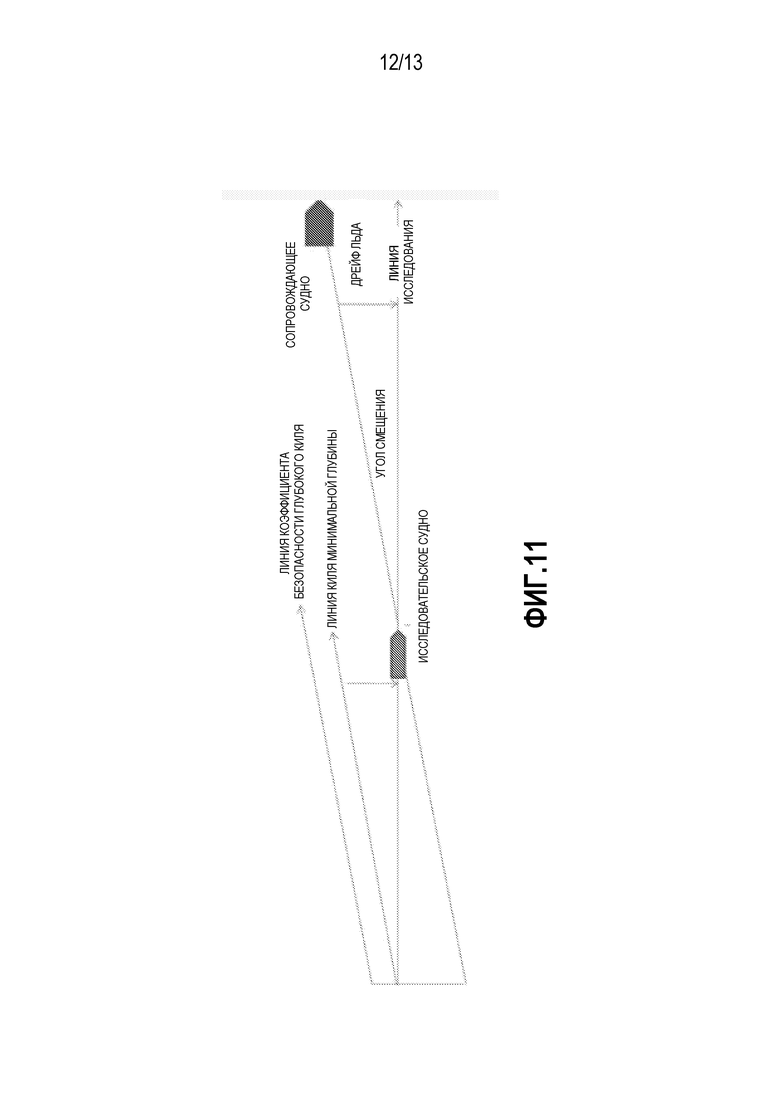
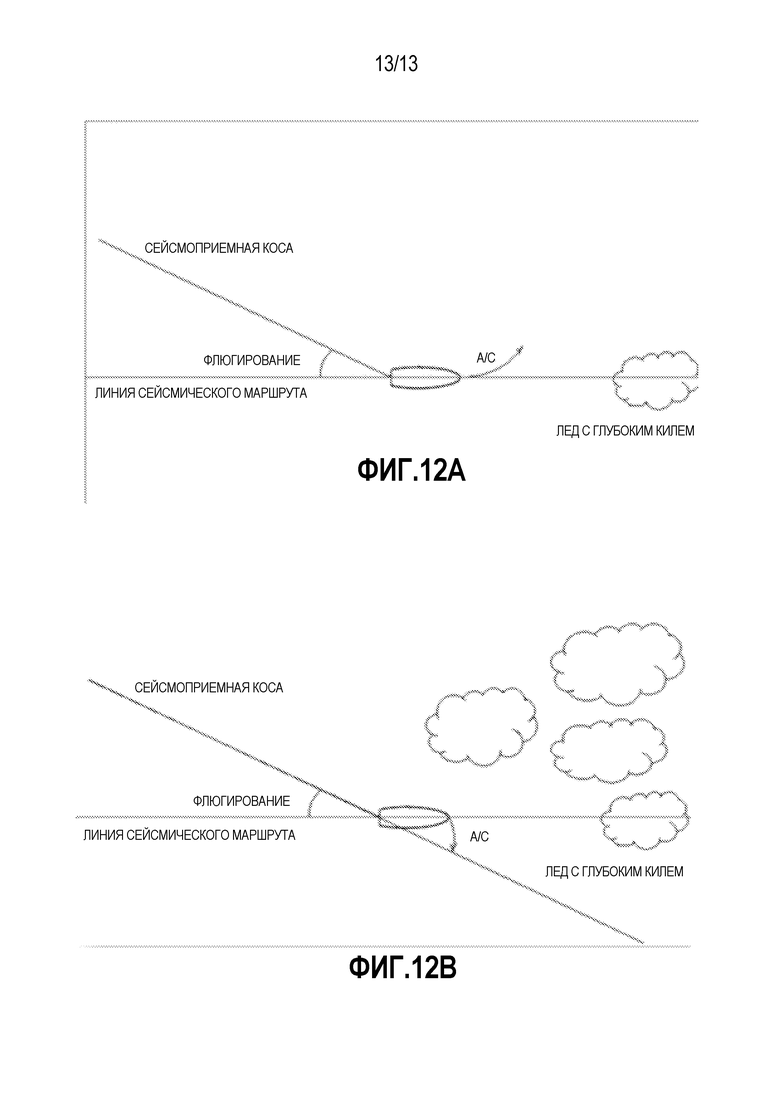
Изобретение относится к области геофизики и может быть использовано при проведении сейсморазведки в покрытых льдом водах посредством первоначального планирования маршрута исследования, пересекающего район исследования. Первоначальный маршрут планируется на основе первоначальных ледовых условий в районе исследования, имеющем покрытые льдом воды. После подготовки системы сейсмическая система развертывается в воду с исследовательского судна в районе исследования. Это типично выполняется в районе, относительно свободном ото льда. По меньшей мере, одно сопровождающее судно сопровождает исследовательское судно, когда оно проходит маршрут исследования и получает сейсмические данные. Исследовательское судно буксирует сейсмическую систему под поверхностью покрытой льдом воды, чтобы избегать льда. В то же время, системы и операторы наблюдают в районе исследования по маршруту исследования за фактическими ледовыми условиями. Технический результат - повышение точности получаемых данных и эффективности сейсморазведочных мероприятий за счет того, что сопровождающее судно может контролировать фактические ледовые условия по маршруту исследования, что позволяет исследовательскому судну не останавливаться. 3 н. и 18 з.п. ф-лы, 23 ил.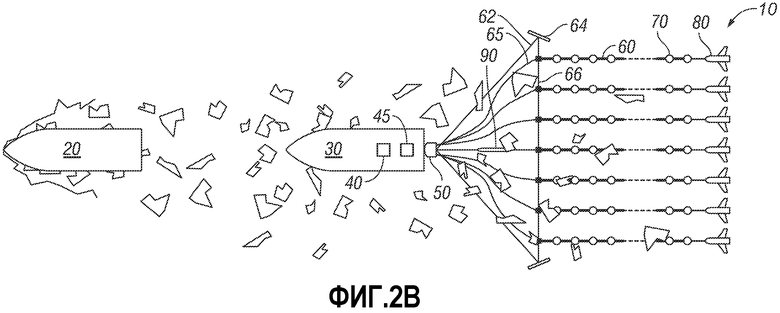
1. Способ выполнения морской сейсморазведки в покрытых льдом водах, способ содержит этапы, на которых:
планируют маршрут исследования, пересекающий район исследования, на основе первоначальных ледовых условий в районе исследования, имеющем покрытые льдом воды;
развертывают сейсмическую систему в воду с исследовательского судна в районе исследования;
проходят маршрут исследования, по меньшей мере, с одним сопровождающим судном, сопровождающим исследовательское судно;
получают сейсмические данные по маршруту исследования, буксируя сейсмическую систему с исследовательского судна под поверхностью покрытой льдом воды;
наблюдают в районе исследования по маршруту исследования за фактическими ледовыми условиями; и
контролируют фактические ледовые условия по маршруту исследования, по меньшей мере, с помощью одного сопровождающего судна.
2. Способ по п. 1, в котором планирование маршрута исследования, пересекающего район исследования, на основе первоначальных ледовых условий в районе исследования, имеющем покрытые льдом воды, содержит этап, на котором определяют первоначальные ледовые условия в районе исследования, имеющем покрытые льдом воды.
3. Способ по п. 1, в котором планирование маршрута исследования, пересекающего район исследования, на основе первоначальных ледовых условий содержит этап, на котором заканчивают маршрут исследования в районе области исследования с новым или меньшим ледовым покрытием.
4. Способ по п. 1, в котором развертывание сейсмической системы в воду с исследовательского судна в районе исследования содержит этап, на котором развертывают сейсмический источник сейсмической системы, чтобы протягиваться вертикально с судна.
5. Способ по п. 1, в котором развертывание сейсмической системы в воду с исследовательского судна в районе исследования содержит этапы, на которых развертывают сейсмический источник сейсмической системы, чтобы протягиваться горизонтально от судна, и поддерживают сейсмический источник затопленным ниже поверхности воды с помощью плавучего средства.
6. Способ по п. 1, в котором развертывание сейсмической системы в воду с исследовательского судна в районе исследования содержит этап, на котором буксируют сейсмический источник сейсмической системы с точкой буксировки на судне ниже поверхности воды.
7. Способ по п. 1, в котором развертывание сейсмической системы в воду с исследовательского судна в районе исследования содержит этап, на котором буксируют сейсмическую косу сейсмической системы с точкой буксировки на судне ниже поверхности воды.
8. Способ по п. 1, в котором развертывание сейсмической системы в воду с исследовательского судна в районе исследования содержит этап, на котором защищают кабели сейсмической системы в канале скега, протягивающемся под поверхностью воды от судна.
9. Способ по п. 1, в котором наблюдение в районе исследования по маршруту исследования за фактическими ледовыми условиями содержит этап, на котором совместно используют наблюдаемую информацию между исследовательским судном и, по меньшей мере, одним сопровождающим судном.
10. Способ по п. 1, в котором наблюдение в районе исследования по маршруту исследования за фактическими ледовыми условиями содержит этап, на котором используют одно или более из ледового радара, физических наблюдений, погодных программ или ледовых карт.
11. Способ по п. 1, в котором действия наблюдения и контроля содержат этапы, на которых: определяют направление и дрейф льда в покрытых льдом водах относительно маршрута исследования; и расчищают путь через лед с помощью, по меньшей мере, одного сопровождающего судна впереди исследовательского судна на основе направления и дрейфа, так что исследовательское судно, движущееся по пути, придерживается маршрута исследования.
12. Способ по п. 11, в котором расчистка пути содержит этапы, на которых разламывают и рассеивают встречающийся лед.
13. Способ по п. 11, в котором расчистка пути содержит этап, на котором расчищают путь в пределах зоны безопасности.
14. Способ по п. 1, в котором действия наблюдения и контроля содержат этапы, на которых: обнаруживают ледяной киль в районе исследования больше предварительно определенной глубины, предполагаемой для прохождения над сейсмической системой, буксируемой под поверхностью воды; и
погружают сейсмическую систему на более глубокую глубину под водой в ответ на обнаруженный ледяной киль.
15. Способ по п. 14, в котором обнаружение ледяного киля в районе исследования больше предварительно определенного размера содержит этапы, на которых обнаруживают ледяной торос на поверхности воды выше предварительно определенной высоты надводной части и сопоставляют обнаруженный ледяной торос с соответствующим ледяным килем предварительно определенной глубины.
16. Способ по п. 1, в котором действия наблюдения и контроля содержат этапы, на которых: наблюдают флюгирование сейсмической системы, буксируемой исследовательским судном;
обнаруживают ледовое препятствие по маршруту исследования впереди исследовательского судна; и
поворачивают исследовательское судно в сторону от обнаруженного ледового препятствия на основе наблюдаемого флюгирования.
17. Способ по п. 16, в котором, если область сбоку от исследовательского судна по направлению к флюгерному положению является свободной от обнаруженного препятствия, поворот исследовательского судна содержит этап, на котором поворачивают исследовательское судно в сторону, в которую флюгирует исследовательская система.
18. Способ по п. 16, в котором, если область сбоку от исследовательского судна по направлению к флюгерному положению не является свободной от обнаруженного препятствия, поворот исследовательского судна содержит этап, на котором поворачивают исследовательское судно в одну линию с флюгерным положением сейсмической системы.
19. Способ выполнения морской сейсморазведки в покрытых льдом водах, способ содержит этапы, на которых:
получают сейсмические данные по маршруту исследования посредством буксировки, с помощью исследовательского судна, сейсмической системы ниже поверхности покрытой льдом воды со скоростью исследования; определяют направление и дрейф ледовых условий по маршруту исследования;
определяют маршрут расчистки в области впереди исследовательского судна на основе скорости исследования и направленности и дрейфа ледовых условий;
расчищают ледовые условия в районе впереди исследовательского судна по маршруту исследования с помощью, по меньшей мере, одного сопровождающего судна.
20. Способ по п. 19, дополнительно содержащий этап, на котором:
непрерывно контролируют фактические ледовые условия по маршруту исследования, наблюдая в районе исследования по маршруту исследования фактические условия и используя, по меньшей мере, одно сопровождающее судно, чтобы ломать или рассеивать лед, встречающийся по маршруту исследования.
21. Система морской сейсморазведки для исследования маршрута исследования в районе покрытых льдом вод, содержащая:
исследовательское судно, имеющее защитный скег, по меньшей мере, одну сейсмическую косу и, по меньшей мере, один сейсмический источник, по меньшей мере, одна сейсмическая коса и источник разворачиваются с исследовательского судна и защищаются ото льда на поверхности покрытых льдом вод посредством защитного скега, исследовательское судно буксирует, по меньшей мере, одну сейсмическую косу и источник по маршруту исследования под поверхностью покрытых льдом вод;
сопровождающее судно, контролирующее лед в районе относительно исследовательского судна и маршрута исследования;
управляющее оборудование, наблюдающее за ледовыми условиями в районе и координирующее связь и навигацию наблюдаемых ледовых условий между исследовательским судном и сопровождающим судном.
| US 20100226204 A1, 09.09.2010 | |||
| СПОСОБ ПРОВЕДЕНИЯ ПОДВОДНО-ПОДЛЕДНОЙ ГЕОФИЗИЧЕСКОЙ РАЗВЕДКИ И ТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2388022C1 |
| US 5113376 A, 12.05.1992 | |||
| КОМПЛЕКС ДЛЯ БУКСИРОВКИ ЗАБОРТНОГО СЕЙСМООБОРУДОВАНИЯ | 2006 |
|
RU2317572C1 |
| СПОСОБ МОРСКОЙ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ НА АКВАТОРИЯХ С ЛЕДОВЫМ ПОКРОВОМ | 1990 |
|
SU1835938A1 |
| US 5157636 A, 20.10.1992. | |||

