ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к железнодорожной инфраструктуре, а в частности, к системе контроля пути, подходящей для установки на транспортном средстве, например, грузовом или пассажирском поезде.
УРОВЕНЬ ТЕХНИКИ
Необходимо контролировать состояния железнодорожных путей, или их составляющих шпал, рельсов, и т.д., для обеспечения безопасности эксплуатации с течением времени. Пути подвергаются износу и усталости, а с течением времени, и повреждению, например, вследствие физических напряжений, вызванных движением поездов, погодных условий и других факторов, которые приводят к разрушению материала пути. Мониторинг путей на регулярной основе способствует идентификации такого повреждения или разрушения. Это, в свою очередь, способствует эффективному техническому обслуживанию путей, например, без вовлечения дополнительных затрат, вызванных повреждением путей, которые невозможно отремонтировать после обнаружения.
За последние годы, на рынке появилось множество специальных систем осмотра путей. Появилась возможность вручную управлять токоприемником с помощью системы глобального позиционирования GPS и/или за счет установки камеры для обзора различных мест на пути, для выявления нерегулярностей/деформаций рельсов. Однако, такой осмотр является дорогостоящим, медленным и требует, чтобы путь был свободен (т.е., не использовался), чтобы этот способ мог выполняться оператором.
Кроме того, в дополнение к обеспечению точных измерений позиции рельса с точки зрения трехмерной строки его геопространственных координат, важно контролировать качество и безопасность пути с точки зрения таких параметров, как ширина колеи, продольный уровень, выравнивание, наклон рельса вовнутрь и перекос пути, называемые геометрией пути, для проведения работ по техническому обслуживанию. Способы для получения точных значений геометрии пути включают в себя многократное измерение пути и усреднение полученных результатов по геометрии пути, или измерение геометрии пути при низких скоростях, например, менее 20 км/ч.
Из-за высокой первоначальной стоимости, измерения в большинстве стран собирают нечасто, обычно дважды в год, - для оценки качества пути, и раз в несколько лет - для получения данных по географической позиции пути.
Одновременные измерения географической позиции пути и его геометрии стало возможным, благодаря внедрению оборудования для сканирования и формирования изображения, в сочетании с системами ГЛОНАСС. Однако, геопространственная позиция пути и геометрия пути (состоянии пути) в работах из уровня техники рассматриваются с помощью отдельных измерений, из-за чего их корреляция была проанализирована в меньшей степени. Кроме того, вследствие неточностей GPS-сигналов, в работах из уровня техники не было возможности использовать данные географической позиции рельса, для улучшения значения геометрии пути.
Таким образом, возникает необходимость в исследовании корреляции геопространственного/географической позиции пути с его качеством (или профиля/геометрии пути), и в использовании упомянутой корреляции для контроля и повышения качества пути на регулярной основе. Кроме того, есть необходимость в получении возможности сбора и обновления данных по геометрии пути во время одного прохода транспортного средства, движущегося на высокой скорости по своей траектории.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является преодоление по меньшей мере одного из вышеуказанных недостатков. Другие преимущества изобретения станут более ясными из подробного описания технических признаков.
Согласно аспекту изобретения обеспечена система контроля пути (и способ) для ее установки на транспортном средстве на пути, содержащем по меньшей мере один рельс. Система контроля пути содержит блок измерения позиции и ориентации, сконфигурированный для определения географической позиции и ориентации системы в ходе по меньшей мере одного прохода транспортного средства по пути, носитель информации для хранения данные геометрии пути, блок лазерного формирования изображения и/или сканирования, сконфигурированный для определения позиции по меньшей мере одного рельса относительно системы контроля пути и позиции по меньшей мере одного рельса и окружения относительно системы контроля пути, в ходе по меньшей мере одного прохода, процессор, сконфигурированный для определения по меньшей мере за один проход, первой позиции рельса с географической привязкой, исходя из географической позиции и ориентации системы контроля рельсов и позиции по меньшей мере одного рельса относительно системы, определения по меньшей мере за один проход, второй позиции рельса с географической привязкой, исходя из географической позиции и ориентации системы контроля рельсов и позиции по меньшей мере одного рельса и окружения относительно системы контроля рельсов, определения третьей позиции рельса с географической привязкой, исходя из первой и второй позиции рельса с географической привязкой и соответствующих данных геометрии пути с географической привязкой, приема, при дополнительном проходе, данных геометрии пути, связанных с каждой позицией рельса относительно системы контроля рельсов, и выходных данных блока измерения позиции и ориентации, обновления, исходя из третьей позиции рельса с географической привязкой, данных геометрии пути, полученных при дополнительном проходе, и сохранения обновленных данных геометрии пути на носителе информации.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
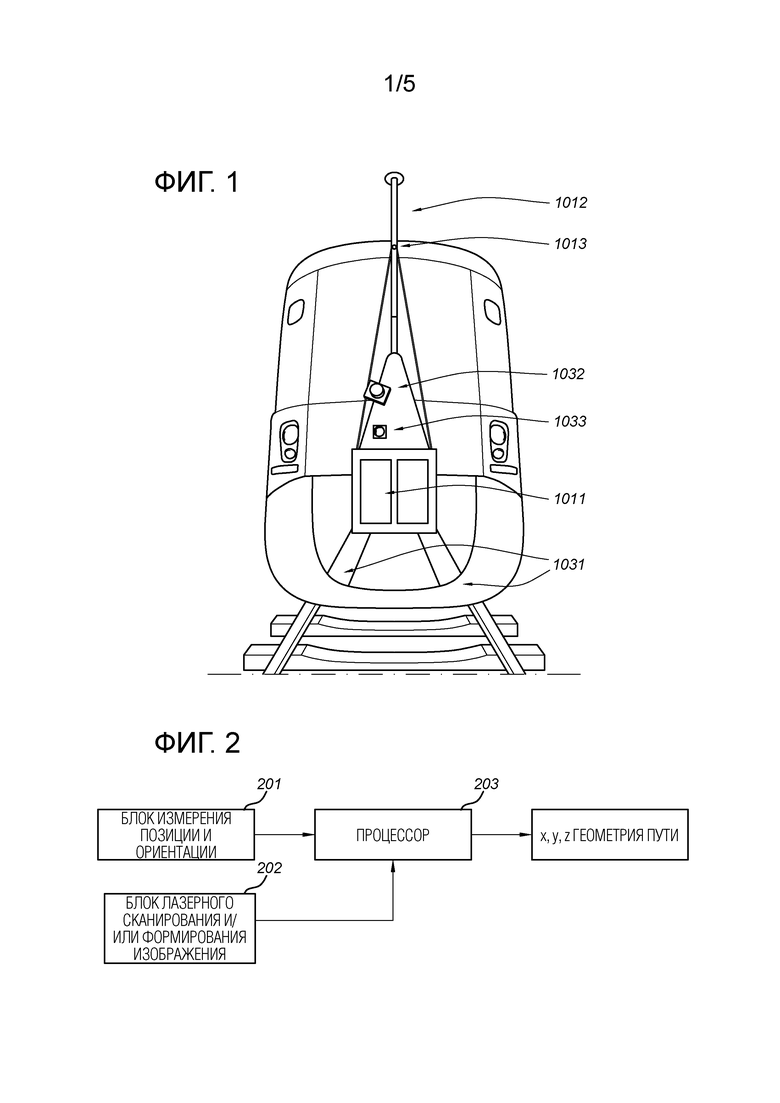
Фигура 1 показывает систему контроля пути в позиции, установленной на транспортном средстве, согласно варианту воплощения настоящего изобретения.
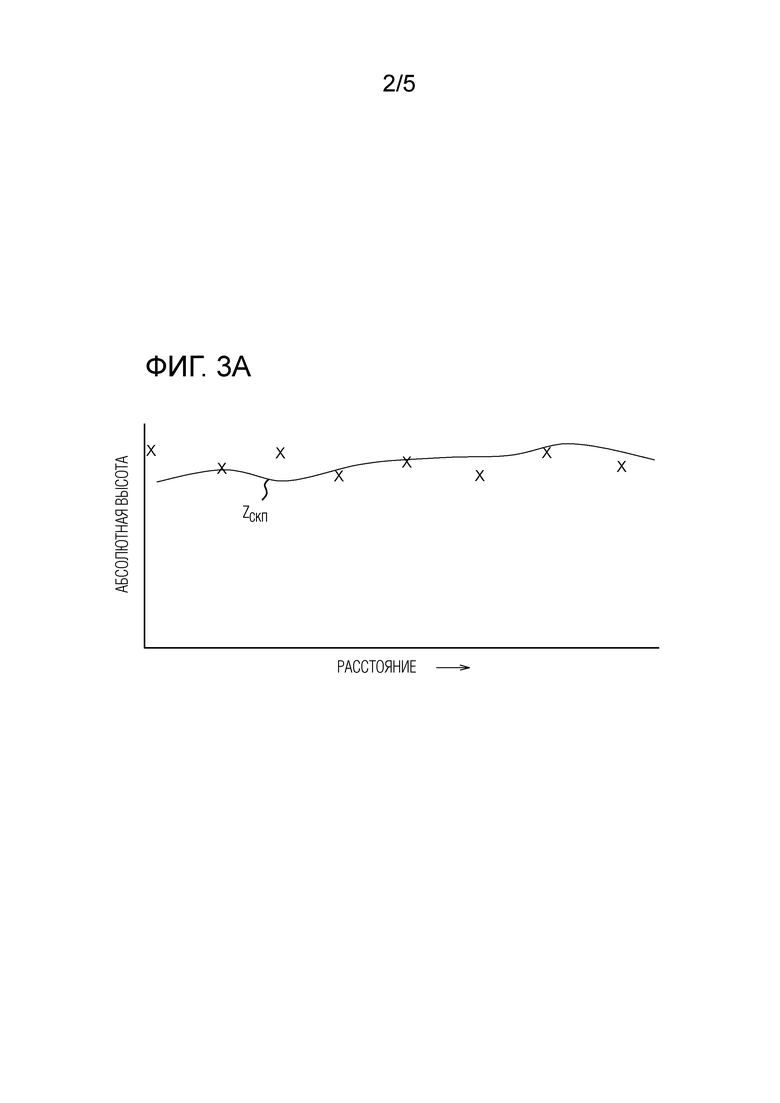
Фигура 2 показывает блочное расположение компонентов системы контроля пути и блок-схему способа согласно варианту воплощения настоящего изобретения.
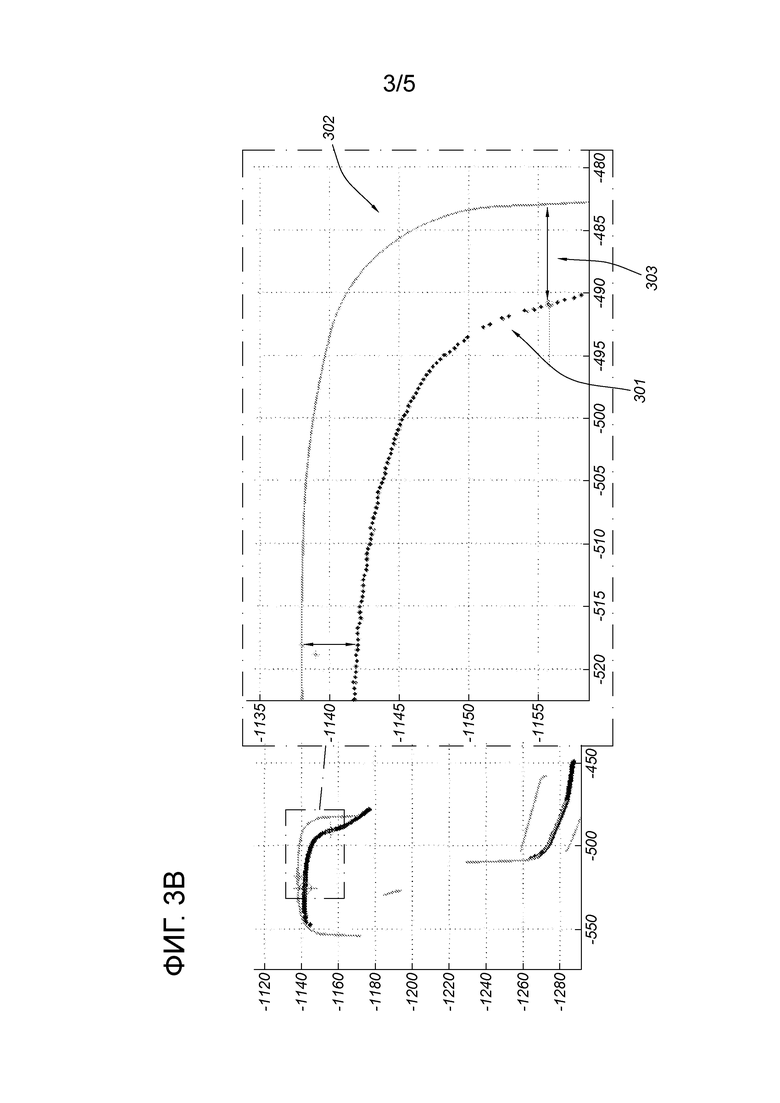
Фигура 3a показывает пример профиля абсолютной высоты (z), полученного системой контроля пути в варианте воплощения изобретения.
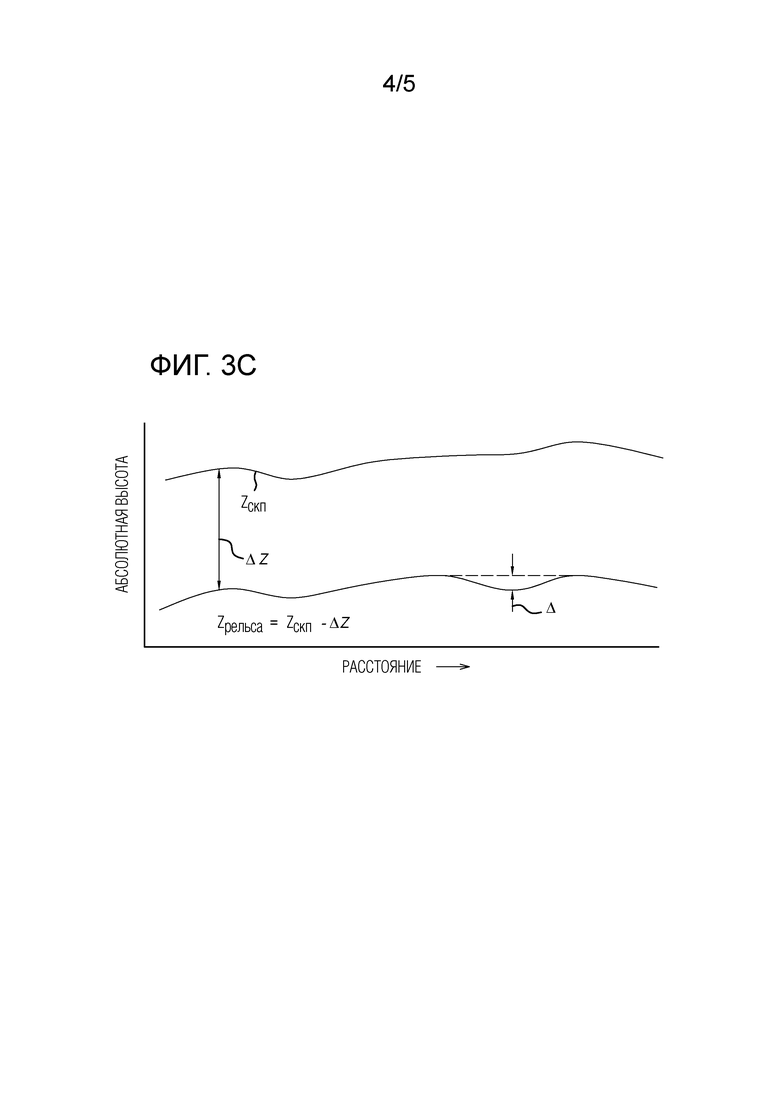
Фигуры 3b - 3c показывают дополнительно примеры способа, осуществляемого системой в варианте воплощения изобретения.
Фигура 4 показывает блок-схему для обновления профиля геометрии пути согласно варианту воплощения изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
Объекты, приведенные в качестве примера в данном описании, представлены для содействия всестороннему пониманию различных примерных вариантов воплощения настоящего изобретения, раскрытых со ссылкой на прилагаемые Фигуры. Следовательно, обычным специалистам в данной области техники должно быть понятно, что различные изменения и модификации примерных вариантов воплощения, описанных в настоящей работе, могут быть сделаны без отступления от объема заявленного изобретения. В частности, могут быть реализованы сочетания конкретных признаков различных аспектов изобретения. Аспект или вариант воплощения изобретения может быть дополнительно выгодно усилен за счет добавления признака, который был описан применительно к другому аспекту или варианту воплощения изобретения.
Кроме того, функциональность, связанная с любым конкретным средством, может быть централизованной или распределенной, будь то локально или удаленно. Может быть выгодным установить, что термины «включают в себя» и «содержат», а также их производные, означают включение без ограничения. В дополнение, ссылка на элемент в единственном числе не исключает возможности наличия более одного элемента, если из контекста не будет четко следовать наличие одного и только одного из элементов. Таким образом, единственное число обычно означает «по меньшей мере один».
Термин «путь» или «железнодорожный путь» следует понимать как конструкцию, состоящую из железнодорожных шпал (шпал), рельсов, прикрепленных к шпалам, и балласта, внедренного в упомянутые шпалы (или сплошного подрельсового основания), и нижележащей насыпи. Путь можно дополнительно понимать как агрегат по меньшей мере из упомянутых частей, которые способствуют движению транспортного средства по множеству поверхностей пути. Термин «рельс», хотя его можно взаимозаменяемо использовать в описании с термином «путь», в первую очередь следует понимать как составная часть пути. Каждый рельс может содержать внутреннюю и внешнюю поверхность, где внутренние поверхности рельсов обращены друг к другу.
Термин «головка рельса» следует понимать как верхняя часть рельса, которая находится в контакте с транспортным средством, когда оно проходит по пути. Термин «подошва рельса» следует понимать как нижняя часть рельса, которая находится в контакте с землей. Головка рельса и подошва рельса могут быть соединены друг с другом, образуя единую непрерывную поверхность.
Термин «окружение» может охватывать области, расположенные вокруг или вблизи рельса или пути. Окружение могут включать в себя объекты или препятствия рядом с траекторией транспортного средства, а также может включать в себя соседний путь.
Система декартовых координат была использована для описания данных по пространственным координатам/позиции для примерных вариантов воплощения настоящего изобретения. Координата «x» может быть использована для обозначения точки в пространстве, которая лежит на оси по направлению пути, и может соответствовать направлению движения транспортного средства по пути. Координата «y» может быть использована для обозначения точки в пространстве, которая лежит на оси, перпендикулярной к внешняя/внутренней поверхности рельса. Координата «z» может быть использована для обозначения точки в пространстве, которая лежит на оси, перпендикулярной к земле, и может применяться для обозначения высота рельса, измеренная от земли. Под «позицией» следует понимать совокупность координат, выраженную в направлениях x, y, z.
Фигура 1 показывает систему контроля пути согласно варианту воплощения настоящего изобретения.
Система контроля пути может быть сконфигурирована как единый блок, который может быть установлен на транспортном средстве. Система может быть установлена на внешней части (например, на передней или задней) транспортного средства, например, поезда, и содержит блок 101 измерения позиции и ориентации, для измерения данных позиционирования (включая угловую позицию/ориентацию) системы, инерциальный 1011 измерительный блок (ИИБ), содержащийся как часть блока измерения позиции и ориентации, для измерения ускорения и вращение системы, носитель информации или память 102, блок 103 лазерного сканирования и/или формирования изображения, содержащий по меньшей мере лазерный 1031 сканер, включающий в себя, например, лазерная система обнаружения и измерения дальности (лидар) 1032 на 360 градусов, для получения данных расстояния/и ориентации рельса и/или окружения (например, платформ, растений, мостов) относительно системы и/или по меньшей мере один датчик изображения или камеру 1033 для приема изображений или киноизображений рельса и/или окружения. Блок лазерного сканирования может содержать по меньшей мере один лазер для облучения и сбор информации о каждом рельсе, составляющем путь, и/или информации об окружающих объектах. Блок сканирования адаптирован для поворота на 360 градусов вокруг своей оси, для получения данных о дальности, соответствующих близости железнодорожного пути.
Система контроля пути дополнительно содержит процессор 104 для обработки данных, полученных элементами системы, и блок 105 связи. Процессор может быть воплощен как центральный блок, обрабатывающий выходные сигналы, соответствующие блоку измерения позиции и ориентации и блоку сканирования/и формирования изображения, или в качестве распределенных блоков, обрабатывающий каждый выходной сигнал по отдельности. Блок позиционирования может содержать, например, приемопередатчик/приемник 1012 глобальной спутниковой навигационной системы (ГЛОНАСС) для измерения географической позиции системы. Этот блок ГЛОНАСС может быть прикреплен к мачте/опоре 1013, сконструированной из жесткого материала, такого как углеродное волокно. Опора установлена так, что она выступает из части системы контроля пути, которая вмещает в себя блок лазерного сканирования и/или формирования изображения, в направлении, перпендикулярном к направлению пути, и имеет подходящую длину. Опора может складываться для простоты транспортировки.
Система контроля пути может присутствовать в виде единого блока или в виде отдельных частей, и может быть установлена на внешней секции/часть транспортного средства, например, на его переднем или заднем конце. Для прикрепления или соединения системы с транспортным средством могут быть использованы любые подходящие средства крепления. Транспортное средство может быть снабжено подходящим сцепным устройством, способным связывать систему с поездом, например, через подходящую переходную муфту. Установка блока является съемной. Установку, как и отсоединение можно осуществлять за промежуток времени менее двух минут, что легко достигается при регулярных остановках поезда. Это снижает необходимость в специальных измерительных поездах или в дополнительных путях для поездов, прокладываемых для облегчения измерения путей, без помех для нормального обслуживания поездов.
Когда транспортное средство меняет направление пути, прикрепленная система проходит путь вместе с транспортным средством. В нижеследующем разделе подробно описан каждый компонент системы контроля пути и описан способ для получения и обновления данных геометрии пути с использованием данных, полученных с помощью упомянутых компонентов. Система может быть дополнительно снабжена силовыми блоками, и другими системами управления и контроля (не показаны), для управления различными элементами/компонентами системы, как легко может быть понято специалистами в данной области техники.
Фигура 2 показывает блочное расположение системы контроля пути согласно варианту воплощения настоящего изобретения.
Согласно варианту воплощения блок 201 измерения позиции и ориентации измеряет географическую позицию системы и/или транспортного средства, на которой оно установлено, при прохождении пути транспортным средством. Блок измерения позиции и ориентации может включать в себя приемник/приемопередатчик ГЛОНАСС, содержащий глобальную систему позиционирования (GPS), для измерения позиций в режиме реального времени. Для этой цели, антенна ГЛОНАСС может быть прикреплена к мачте/опоре в заданной позиции (на заданной высоте).
Не ограничиваясь примерами, приемник GPS может определять трехмерные (x, y, z) координаты позиции системы на интервале 15 м, предпочтительно, 10 м, а более предпочтительно, на интервалах 8 м между двумя точками измерения. Данные также можно собирать при произвольных интервалах. Блок измерения позиции и ориентации может предоставлять данные о геопространственной позиции системы, когда оно связано с транспортным средством, например, поездом, который движется при средней скорости 160 км/ч.
В варианте воплощения, данные позиционирования, определенные приемником GPS/ГЛОНАСС, могут быть улучшены с использованием данных, извлеченных из опорной станции непрерывного действия (ОСНД). Такая корректировка повышает точность измерений GPS до диапазона рабочих частот +/- 50 мм.
На движущемся транспортном средстве, позиция датчика не фиксируется равномерно. В неточности вносит вклад множество факторов, включая вибрацию, удар, ускорения и перемещения транспортного средства, которые необходимо учитывать при расчете позиции системы. Поэтому, для получения значимых/точных измерений геометрии рельса или пути, влияние этих различных факторов необходимо исключить из измеренных данных.
В варианте воплощения, блок измерения позиции и ориентации содержит инерциальный измерительный блок (ИИБ), который выявляет вращение/ускорение транспортного средства. ИИБ дополнительно регулирует угловую ориентацию системы путем регулирования ориентации системы применительно к инерциальной системе координат опорного или иного объекта. ИИБ включает в себя сочетание инерциальных датчиков, таких как один или более акселерометров и один или более гироскопов (например, вертикальный гироскоп, гироскоп скорости), и т.п. ИИБ принимает данные скорости/ускорения, исходя из движения транспортного средства. С помощью ИИБ, позицию системы контроля пути можно скорректировать с точностью +/- 15 мм. Измерения с помощью ИИБ можно осуществлять на интервале 3 м, предпочтительно, 1 м, а более предпочтительно, 0,1-0,3 м по пути, с рабочей частотой 200-500 Гц, предпочтительно, 300 Гц. Как должно быть ясно специалистам в данной области техники, в изобретении ГЛОНАСС и ИИБ могут быть воплощены в виде одного и того же, либо отдельных объектов.
В дополнение к позиционной корректировке путем измерения угловой ориентации системы контроля пути, ИИБ также может принимать данные о шаге, угловом колебательном движении, и информацию о рыскании транспортного средства, которые можно использовать для определения параметров геометрии пути, таких как наклон, уклон, продольный уровень, поперечный уровень, кривизна пути, и т.д. Точные и одновременные измерения относительных перемещений между датчиком GPS и проверяемым путем или рельсом очень существенны при получении правильного профиля рельса и измерений геометрии пути.
Выходные данные блока позиционирования подают на процессор, который обрабатывает каждую измеренную географическую позицию системы для получения профиля позиций системы на протяжении пути или траектории транспортного средства. Например, Фигура 3a показывает иллюстрацию того, как абсолютная высота (z) системы контроля пути, ztms, изменяется по пути.
Блок 202 лазерного формирования изображения и/или сканирования, содержащий датчики формирования изображения и/или сканирования, способен захватывать изображения и/или сканированные данные каждого рельса и/или окружения при движении транспортного средства по рельсовым путям. Можно использовать датчик изображения лазерной системы обнаружения и измерения дальности (лидара). Блок формирования изображения содержит по меньшей мере один лазер, обладающий заданными характеристиками (шириной импульса, интенсивностью, выходной мощностью и т.д.), и который функционирует в подходящем диапазоне длин волн. В предпочтительном варианте воплощения, каждый лазер, содержащийся в блоке лазерного формирования изображения и/или сканирования, сконфигурирован для проецирования луча на любой рельс, при этом пятно лазерного луча имеет эллиптическое пространственное поперечное сечение. Эллиптический луч освещает секцию пути/рельса вдоль своих осей y и/или z, при заданной координате x, в характеристическом способе секционирования света. Принцип секционирования света и его применение в измерениях трехмерной топологии очевиден специалистам в данной области техники, а следовательно, в дальнейшем не рассматривается. Настраиваемые лазеры особо применимы для регулирования характеристик лазерного излучения. Блок формирования изображения может включать в себя лазеры непрерывного излучения (CW), либо импульсные лазеры, причем излучение с течением времени происходит непрерывно или прерывисто. Является предпочтительным, чтобы лазер ультрафиолетового диапазона (например, эксимерный) обследовал пути, при минимизированной интерференции от длин волны видимого света. В качестве альтернативы или в сочетании с этим, в блоке формирования изображения могут быть установлены различные отдельные датчики, с фильтрами длины волны, для регулирования длин волн излучения, выявленного каждым датчиком.
Лазер (лазеры), включенный в блок формирования изображения и/или сканирования, облучает рельс и затем, встроенный в него детектор (например, ПЗС-камера, фотодиод) выявляет, например, интенсивность света, отраженного от поверхности рельса. Для этого можно использовать любой принцип спектроскопии отражения, например, время пролета (TOF). Позицию рельса относительно системы (расстояние от системы) определяют, исходя из излучения, отраженного от поверхности рельса. Каждый лазер сконфигурирован для облучения точки, представляющей интерес, на каждом рельсе. Отраженный свет выявляют соответствующим датчиком и анализируют применительно к падающему/испускаемому лучу, для интерпретации соответствующей геометрии отражающей поверхности (поверхностей), например, рельса.
Блок лазерного формирования изображения и/или сканирования дополнительно принимает профиль изображений высокого разрешения рельса, с использованием, например по меньшей мере одной камеры, при прохождении лазерного луча по рельсу. Изображение дает ссылку на идентичность измеряемого объекта (например, рельса, или его поверхности). Каждая камера может быть расположена на позиции каждого лазера или вблизи нее, для получения изображения представляющей интерес поверхности или точка рельса, которая связана с отраженным излучением. Блок формирования изображения может получать данные изображения, имеющие по меньшей мере примерно 5 мегапикселей, а более предпочтительно, 12 мегапикселей, а еще более предпочтительно, 30 мегапикселей. Для сбора изображений может быть использовано любое подходящее оборудование камеры. Система может дополнительно содержать множество видеокамер с географической привязкой, для наблюдения за контролируемой областью и окружающими объектами при движении транспортного средства по своей траектории (съемочному маршруту).
Изображения может быть захвачено на интервалах 0,5-1,5 м по пути, предпочтительно, 0,09 м при прохождении транспортного средства, движущемся по пути при средней скорости 150-200 км/ч. Блок формирования изображения может измерять координаты более 1400 лазерных точек на головку рельса и 500 раз в секунду (частота 500 Гц). Блок формирования изображения и/или сканирования, таким образом, может быть сконфигурирован из процессора 203, для генерирования данных координат для позиции луча на поверхности рельса, например, бинарных данных, содержащих x (по пути), y (в плоскости и перпендикулярно к поверхности пути/рельса) и z (глубина или высота рельса от земли), и/или генерирования изображения, показывающего лазерный луч на фоне его окружения. Данные позиционирования затем могут быть использованы процессором для расчета геометрии пути, соответствующей по меньшей мере одной из высоты рельса над землей (направление z), ширины колеи или расстояния между рельсами (направление y), центра пути (направление y), расстояния между соседними линиями пути (направление x), уклона (направление z), и т.д. Например, профиль уклона на протяженности расстояния пути может быть отображен путем агрегирования данных позиционирования, соответствующих разности значений zxi для двух рельсов при последовательных или перемежающихся позициях x (x1, x2, …xi) пути. Высота, а следовательно, профиль продольного уровня составляющего рельса пути на протяженности расстояния пути можно получить путем агрегирования данных позиционирования, соответствующих zxi первого рельса или zxi второго рельса при последовательных или перемежающихся позициях x (x1, x2..xi) пути. В случае профиля ширины колеи, разность данных позиционирования, соответствующих yxi обоих рельсов, определяют при различных позициях x1, x2…xi на протяженности расстояния (длина, X км) пути. Профиль геометрии может быть дополнительно выражен применительно к центральной линии пути. Центральную линию пути получают путем агрегирования на протяжении пути (x) центральных точек каждого отдельного расстояния ширины пути, рассчитанного между соответствующими координатами y.
Каждое захваченное изображение рельса (головки рельса и/или подошвы рельса) может быть скомбинировано с данными, полученными с помощью GPS/и ИИБ процессором, для получения трехмерных позиций рельса с географической привязкой, и для дополнительного расчета износа рельса, путем сопоставления захваченного изображения с опорными изображениями рельса в различных местоположениях пути. Фигура 3b показывает пример изображения (301), полученного блоком формирования изображения и/или сканирования, которое сопоставляется с опорным (302) в конкретном местоположении пути, а износ (303) обозначается в виде расхождения текущего профиля с опорным.
Для повышения области обзора, несколько датчиков формирования изображения могут быть использованы в блоке лазерного формирования изображения, а в качестве альтернативы, или наряду с ним, в сканере лидар на 360 градусов. В предпочтительном варианте воплощения, центральный датчик формирования изображения может быть расположен, как правило, вокруг рельса, проверяемого при использовании, а два датчики формирования изображения - на каждой из его сторон. Центральный датчик обеспечивает вид сверху используемого пути, тогда как датчики сбоку наклонены к нему под углом и обеспечивают вид остального пути с каждой стороны рельса. Сканер ЛИДАР на 360 градусов выявляет объекты (препятствия) в зоне излучения вокруг рельсового транспорта. Сканер может содержать лазер, который вращается вокруг заданной оси при скоростях 150-200 оборотов в секунду. Сканированные данные, полученные со сканера ЛИДАР на 360 градусов, комбинируют с данными, полученными с помощью GPS/и ИИБ, с получением трехмерного облака точек географической позиции, связанной с путем и окружением.
Расстояние между системой контроля пути и поверхностью рельса на протяжении пути может быть дополнительно определено процессором путем сопоставления координаты позиции системы контроля пути, полученной с помощью GPS и/или ИИБ, с координатой позиции рельса, как показано на Фигуре 3c. Разброс расстояния (Δ) выше заданного порога можно использовать для определения дефектов на пути.
Измерения географической позиции системы с помощью GPS и/или ИИБ в сочетании с определением позиции рельса относительно системы с помощью блока лазерного формирования изображения/сканирования позволяет процессору определять трехмерную географическую позицию рельса, на которую указывается в данных ГЛОНАСС, и соответствующие трехмерные данные геометрии пути с географической привязкой, с высокой точностью.
Путем агрегирования GPS и/или ИИБ и измерений рельса с использованием блока сканирования/и формирования изображения (данные изображения высокого разрешения) на протяжении (например, длины и/или ширины и/или высота) пути, для пути можно получить трехмерную позицию с географической привязкой и профили геометрии пути. Данные геометрии пути с географической привязкой могут содержать такие параметры, как уклон, ширина колеи, центральная линия пути, и т.д.
Блок формирования изображения и/или сканирования пути системы измерения сконфигурирован так, чтобы он вращался вокруг центральной оси, для дополнительного приема данных о трехмерном положении/ о дальности рельсов, в сочетании с окружением пути, в трех измерениях. Это позволяет получить трехмерную точечную карту/облако, извлеченное из данных отражения, полученных от рельсов и объектов вблизи пути. Как было указано выше, такие данные комбинируются с трехмерной географической позицией, полученной с помощью GPS и/или ИИБ, что приводит к получению облака точек данных с географической привязкой, из которых рассчитывают соответствующие параметры геометрии пути по протяженности пути. Такие данные геометрии пути, полученные из данных позиционирования облака точек, можно сопоставить/сравнить с данными геометрии пути с географической привязкой, для повышения точности измерений геометрии рельса.
В варианте воплощения, проверку пути можно повторять путем многократного использования транспортного средства (например, 3-4 проходов) на конкретной траектории/пути. Каждый проход транспортного средства по пути дает трехмерное облако точек данных с географической привязкой, из которого можно дополнительно рассчитать профили геометрии пути, например, центральные линии пути, и сравнить/сопоставить их с геометрией пути, например, центральные линии пути, связанные с данными отражения от рельса, в сочетании с данными позиционирования, полученными от GPS и/или ИИБ. Хотя это не является существенным для изобретения, данные, полученные с помощью таких нескольких проходов, могут дополнительно повысить точность географических позиций рельса, а следовательно, данные геометрии пути с географической привязкой.
Расчет центра пути особо эффективен при объединении профилей геометрии пути или точечных облаков, полученных от ЛИДАР, собранных при нескольких измерениях пути. Поскольку расстояние от центра пути (опорного) до каждого рельса должно быть постоянным или почти постоянным, результат сравнения позволяет выявить несоосность пути, если расстояние между центром и каждым из рельсов показывает отклонение выше порогового.
Другие профили геометрии пути, например, ширины колеи, уклона, продольного уровня можно сопоставлять аналогичным образом и получать с повышенной точностью. Измерения геометрии пути можно осуществлять с точностями, с отклонениями +/-0,5 мм на 10 м измерения. Каждое измерение трехмерного облака точек с географической привязкой сопоставляют с данными о рельсе с географической привязкой, с получением очень точной позиции пути с географической привязкой. С использованием способа, позиции рельса можно определить с точностью, с отклонениями менее 8 мм по направлениям x и y, и с отклонением менее 12 мм по направлению z. Полученный абсолютный профиль геометрии пути и позиция пути могут служить в качестве опорных для определения значений геометрии пути в более поздний период времени. Дополнительные проверки пути можно осуществлять, например, ежемесячно. Каждая проверка дает вышеупомянутые позиции рельсов с географической привязкой и связанные с ними данные геометрии пути/рельса, которые обновляются на регулярной основе.
Фигура 4 показывает блок-схему для обновления профиля геометрии пути согласно варианту воплощения изобретения.
Как было указано выше, измерения географической позиции системы с помощью GPS и/или ИИБ могут быть скомбинированы с определением позиции рельса относительно системы блоком лазерного формирования изображения/сканирования, для определения трехмерной географической позиции рельса, которые отображаются в данных ГЛОНАСС, и соответствующих трехмерных данных геометрии пути с географической привязкой (профиля).
Система движется по пути при первом проходе/цикле измерений, с получением первого измерения трехмерного профиля TG0 геометрии пути с географической привязкой для пути. В более поздней точке по времени, например, через месяц, осуществляют второй цикл измерений, для получения второго профиля TG1 геометрии пути с географической привязкой.
Если процессор определяет, что профиль геометрии пути с географической привязкой, полученный в ходе второго цикла измерений рельсового пути, изменился по сравнению с профилем первого цикла измерений, например, выше заданного порогового значения, он обнаруживает несоответствие в параметре геометрии пути в конкретном местоположении (x) или в местоположениях (x1, x2..xi) пути.
В качестве примера, отклонение наклона 2,5 мм, измеренное на длине 20 м пути, считается несоответствием или «измененным путем».
Далее определяют, в какой позиции или позициях пути (например, X м) находится упомянутое изменение профиля. Первый профиль TG0 уклона на упомянутых X м пути заменяют частью второго профиля уклона, который лежит на X м пути. В варианте воплощения, если отклонение между первым (старым) и вторым (новым) профилем выше заданного порогового значения на конкретном расстоянии пути (X м), процессор заменяет часть старого профиля геометрии пути на конкретном расстоянии пути новым профилем, для отражения текущего состояния пути. Новые данные можно подогнать/объединить со старыми данными, с использованием любой подходящей программы аппроксимации. Полученное слияние содержит новые данные на измененном участке пути и старые данные на неизмененном участке, что приводит к обновленному измерению первого профиля геометрии пути.
В качестве альтернативы или в дополнение к этому, часть географической позиции рельса, полученной путем комбинирования сканированных данных рельса и данных, собранных с помощью GPS и/или ИИБ в первом цикле измерений, заменяют географической позицией рельса, полученной во втором цикле измерений. Таким образом, способ обеспечивает обновленные географические данные позиционирования пути, и обзор того, как изменилась позиция пути, а следовательно, и геометрия пути между периодами измерений. Кроме того, ресурсы, которые потребовались бы в ином случае для обновления всех комплектов данных пути, можно эффективно использовать путем замены соответствующих частей первого профиля геометрии пути.
Как описано выше, трехмерная точечная карта/облако, выведенное из данных отражения, полученных от рельсов и объектов вблизи пути, сочетается с трехмерной географической позицией, полученной с помощью GPS и/или ИИБ, что приводит к получению облака точек данных с географической привязкой, с повышенной точностью, из которого рассчитывают соответствующие параметры геометрии пути по протяженности пути. Такие данные геометрии пути, полученные из данных позиционирования облака точек, можно сопоставлять/сравнивать с данными геометрии пути с географической привязкой, для повышения точности данных геометрии пути.
Сразу после получения обновленного первого профиля геометрии пути, обновленные/замененные участки измененного пути можно привести к требуемой точности уровня географической позиции/геометрии пути, с использованием улучшенной позиции рельса/пути с географической привязкой и соответствующей геометрии пути с географической привязкой, определенной путем сопоставления с измерением трехмерного облака точек с географической привязкой, с данными о рельсе с географической привязкой.
Например, расстояние между соседними линиями пути/расстояния пути, рассчитанное из полученной географической позиции рельса, можно использовать для корректировки данных. В предпочтительном варианте воплощения, в качестве части коррекции объединенной геометрии пути с использованием значений расстояния пути, количество путей, содержащихся на заданной длине пути, полученной с использованием измерения на лазерном сканере на 360 градусов, с географической коррекцией (данные облака точек) и блока приема изображений, можно сравнить и определить, если их количество идентично. Местоположения путей с несоответствием по количеству путей для дополнительной обработки игнорируются.
Затем, те значения геометрии пути, например, в данном случае, расстояние между соседними линиями пути/расстояние между путями, которые можно вывести из географических позиций рельса/пути, полученных в результате некорректного измерения блока измерения позиции и ориентации (ГЛОНАСС/GPS), исключают из комплекта данных. Такие несоответствия обычно возникают в местоположениях пути, где имеется стрелка. Этот выполняется путем первоначальной проверки остаточной погрешности при расчете данных геометрии пути за счет сравнения данных трехмерного облака точек с географической привязкой и данных о рельсе с географической привязкой. Определяют, превышает ли остаточная погрешность пороговое значение по меньшей мере в местоположении рельса/пути, и если да, то значение геометрии пути в точке исключается из опорных данных геометрии пути, используемых для обновления геометрии пути. Это повышает точность обновления за счет компенсации сценариев, где для определенных местоположений пути могут иметься относительно менее надежные данные ГЛОНАСС.
Кроме того, разности между расстояниями пути с географической привязкой, вычисленными с использованием измерений облака точек (сканер на 360 градусов) и блока приема изображений, минимизируют с использованием заданных допустимых стандартных отклонений абсолютной позиции. Порядок, в котором выполняют этапы, не влияет на функционирование способа. В случае, когда опорное расстояние пути (профиль) для обновления измеряют путем агрегирования значений, полученных из нескольких проходов транспортного средства по пути, может быть дополнительно осуществлен этап, включающий в себя коррекцию отклонений профиля на различных циклах измерений.
Как описано выше, система может принимать изображения пути высокого разрешения в ходе цикла измерений, из которых также можно определить профиль относительных позиций рельса. Из каждого профиля относительных позиций рельса можно рассчитать соответствующие параметры геометрии пути, которые могу быть обновлены на дополнительном цикле измерений. Процессор может быть сконфигурирован для обновления такой геометрии пути, с использованием улучшенной позиция рельса/пути с географической привязкой, с использованием способа.
Благодаря точной географической позиции рельса, полученной системой, профили геометрии пути, полученные из различных циклов измерений, могут быть легко наложены друг на друга, с незначительным смещением позиций между профилями геометрии пути. Коррекция обновленных данных с использованием улучшенной позиции рельса/пути с географической привязкой и/или геометрии пути с географической привязкой позволяет обновлять параметры качества пути с требуемой точностью, с использованием лишь одного цикла измерений. Таким образом, система допускает обновление параметров геометрии пути, осуществляемой на частых интервалах, и более эффективно осуществлять мониторинг качества (например, износа) путей.
Обновленные и улучшенные данные геометрии пути передаются через блок связи (не показан) на удаленный компьютер (компьютер пользователя) или сохраняются на носителе информации, - встроенном, либо распределенном относительно системы контроля пути.
В варианте воплощения, в дополнение к обработке измерений GPS и блоков формирования изображений, данные можно подвергать предварительной обработке и передать на централизованную вычислительную систему. Для этого, в систему контроля пути могут быть включены отдельные блоки связи. Устройство связи может представлять собой беспроводное устройство, которое может беспроводным образом передавать накопленные данные, или радиочастотный (РЧ) передатчик, который передает их в соответствии с одним или более частотами/протоколами коммерческой сотовой связи (4/5G) на удаленный приемник. Вычислительная система может представлять собой внешний объект, или может быть включена как часть системы. Она также может представлять собой сервер в удаленном местоположении. Это снижает нагрузку на систему, для обработки большого количества данных, связанных с измерениями путей.
Носитель информации или память может быть электрически соединена с GPS и/или с блоками формирования изображения и сконфигурирована для сохранения изображения и/или данных позиционирования. Данный носитель информации может включать в себя один или более компьютерных жестких дисков, съемных дисков, магнитных дисков, запоминающих устройств только для чтения, запоминающих устройств с произвольным доступом, флеш-носителей или других твердотельных запоминающих устройств, и т.п. Запоминающее устройство (необязательно) может быть расположено удаленно от центральной вычислительной системы.
Тогда как изобретение была специально показано и описано со ссылкой на его определенные примерные варианты воплощения, обычным специалистам в данной области техники должно быть понятно, что различные изменения в нем по форме и деталям могут быть сделаны без отступления от объема настоящего изобретения, заданного в прилагаемой формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система контроля готовности фронта к проведению машинизированной выправки железнодорожного пути | 2022 |
|
RU2793867C1 |
| СИСТЕМА И СПОСОБ ДЛЯ КОНТРОЛЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2005 |
|
RU2385446C2 |
| СПОСОБ И СИСТЕМА СБОРА ИНФОРМАЦИИ ДЛЯ УСТРОЙСТВА СОВМЕЩЕННОЙ РЕАЛЬНОСТИ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ | 2019 |
|
RU2702495C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ СОВМЕЩЕННОЙ РЕАЛЬНОСТИ | 2017 |
|
RU2660631C1 |
| Система и способ для определения пространственного положения и выправки железнодорожного пути, устройство лазерного измерения системы сбора данных о фактическом положении пути | 2023 |
|
RU2808852C1 |
| СПОСОБ ОБРАБОТКИ ДАННЫХ ПОЗИЦИОНИРОВАНИЯ | 2008 |
|
RU2501087C2 |
| СИСТЕМА И СПОСОБ ДЛЯ КОНТРОЛЯ ЖЕЛЕЗНОДОРОЖНЫХ КОЛЕС | 2018 |
|
RU2743020C2 |
| СПОСОБ КОНТРОЛЯ ПОПЕРЕЧНОГО ПРОФИЛЯ И РАССТОЯНИЯ МЕЖДУ РЕЛЬСАМИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ВАГОН-ПУТЕИЗМЕРИТЕЛЬ | 2010 |
|
RU2418705C1 |
| СПОСОБ И СИСТЕМА ОБЕСПЕЧЕНИЯ УТОЧНЕННОЙ ИНФОРМАЦИИ О МЕСТОПОЛОЖЕНИИ ДЛЯ БЕСПРОВОДНЫХ МОБИЛЬНЫХ УСТРОЙСТВ | 2012 |
|
RU2571825C2 |
| СПОСОБ ОСУЩЕСТВЛЕНИЯ МОНИТОРИНГА УЛИЧНО-ДОРОЖНОЙ СЕТИ ПОСРЕДСТВОМ ПЕРЕДВИЖНОЙ ДОРОЖНОЙ ЛАБОРАТОРИИ И ФУНКЦИОНАЛЬНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2373325C1 |

Настоящее изобретение относится к системе контроля пути, подходящей для установки на транспортном средстве. Система контроля пути содержит блок измерения позиции и ориентации, сконфигурированный для определения географической позиции и ориентации системы в ходе по меньшей мере одного прохода транспортного средства по пути, носитель информации для хранения данных геометрии пути, блок лазерного формирования изображения и/или сканирования, сконфигурированный для определения позиции по меньшей мере одного рельса относительно системы контроля пути и позиции по меньшей мере одного рельса и окружения относительно системы контроля пути, в ходе по меньшей мере одного прохода, а также процессор. Процессор сконфигурирован для определения по меньшей мере за один проход первой позиции рельса с географической привязкой, исходя из географической позиции и ориентации системы контроля рельсов и позиции по меньшей мере одного рельса относительно системы, определения по меньшей мере за один проход второй позиции рельса с географической привязкой, исходя из географической позиции и ориентации системы контроля рельсов и позиции по меньшей мере одного рельса и окружения относительно системы контроля рельсов, определения третьей позиции рельса с географической привязкой, исходя из первой и второй позиций рельса с географической привязкой и соответствующих данных геометрии пути с географической привязкой, приема, при дополнительном проходе, данных геометрии пути, связанных с каждой позицией рельса относительно системы контроля рельсов, и выходных данных блока измерения позиции и ориентации, обновления, исходя из третьей позиции рельса с географической привязкой, данных геометрии пути, полученных при дополнительном проходе, и сохранения обновленных данных геометрии пути на носителе информации. В результате обеспечивается возможность сбора и обновления данных по геометрии пути во время одного прохода транспортного средства, движущегося на высокой скорости по своей траектории, повышается качество контроля пути. 2 н. и 12 з.п. ф-лы, 6 ил.
1. Система (100) контроля пути для установки на транспортном средстве на пути, содержащем по меньшей мере один рельс, причем система контроля пути содержит:
блок (101) измерения позиции и ориентации, сконфигурированный для определения географической позиции и ориентации системы в ходе по меньшей мере одного прохода транспортного средства по пути;
носитель (102) информации для хранения данных геометрии пути;
блок (103) лазерного формирования изображения и/или сканирования, сконфигурированный для определения позиции по меньшей мере одного рельса относительно системы контроля пути и позиции по меньшей мере одного рельса и окружения относительно системы контроля пути в ходе по меньшей мере одного прохода;
процессор (104), сконфигурированный для:
определения по меньшей мере за один проход первой позиции рельса с географической привязкой на основе географической позиции и ориентации системы контроля рельсов и позиции по меньшей мере одного рельса относительно упомянутой системы;
определения по меньшей мере за один проход второй позиции рельса с географической привязкой на основе географической позиции и ориентации системы контроля рельсов и позиции по меньшей мере одного рельса и окружения относительно системы контроля рельсов;
определения третьей позиции рельса с географической привязкой на основе первой и второй позиций рельса с географической привязкой и соответствующих данных геометрии пути с географической привязкой;
получения при дополнительном проходе данных геометрии пути, связанных с каждой позицией рельса относительно системы контроля рельсов, и выходных данных блока измерения позиции и ориентации;
обновления на основе третьей позиции рельса с географической привязкой данных геометрии пути, полученных при дополнительном проходе; и
сохранения обновленных данных геометрии пути на носителе информации.
2. Система контроля пути по п. 1, в которой процессор сконфигурирован для определения первой позиции рельса с географической привязкой на основе света, отраженного от по меньшей мере одного рельса, и второй позиции рельса с географической привязкой на основе света, отраженного по меньшей мере от одного рельса в сочетании с окружением по меньшей мере рельса на протяжении пути.
3. Система контроля пути по любому из пп. 1, 2, в которой процессор (104) сконфигурирован для обновления данных геометрии пути посредством:
получения второго комплекта данных геометрии пути на другом проходе в более поздний период времени;
замены части данных геометрии пути частью вторых данных геометрии пути.
4. Система контроля пути по п. 3, в которой замена части данных геометрии пути частью вторых данных геометрии пути содержит:
определение того, что часть вторых данных геометрии пути отклоняется от части данных геометрии пути, и
определение того, превышает ли отклонение заданное пороговое значение;
замену, если отклонение превышает заданное пороговое значение, части данных геометрии пути частью вторых данных геометрии пути.
5. Система контроля пути по п. 4, в которой процессор (103) сконфигурирован для корректировки обновленных данных геометрии пути с использованием данных геометрии пути с географической привязкой, соответствующих третьей позиции рельса с географической привязкой.
6. Система контроля пути по п. 3, в которой замена части данных геометрии пути частью вторых данных геометрии пути содержит:
определение того, что часть вторых данных геометрии пути отклоняется от части первых данных геометрии пути; и
определение того, превышает ли отклонение заданное пороговое значение;
замену, если отклонение по меньшей мере в одной позиции пути превышает заданное пороговое значение, географической позиции рельса на основе географической позиции упомянутой системы и позиции по меньшей мере одного рельса относительно упомянутой системы и соответствующего части данных геометрии пути географической позицией рельса на основе географической позиции упомянутой системы и позиции по меньшей мере одного рельса относительно упомянутой системы и соответствующей части вторых данных геометрии пути.
7. Система контроля пути по п. 6, в которой процессор (103) сконфигурирован для корректировки обновленной географической позиции рельса с использованием третьей позиции рельса с географической привязкой.
8. Система контроля пути по п. 1, в которой блок (101) измерения позиции и ориентации содержит инерциальный измерительный блок, который сконфигурирован для обеспечения угловой ориентации упомянутой системы.
9. Система контроля пути по любому из пп. 1-8, в которой процессор (103) дополнительно сконфигурирован для корректировки определенной географической позиции и ориентации системы контроля пути.
10. Система контроля пути по любому из пп. 1-9, в которой блок (102) лазерного формирования изображения и/или сканирования содержит по меньшей мере один лазер, сконфигурированный для облучения другого рельса.
11. Система контроля пути по любому из пп. 1-10, в которой процессор сконфигурирован для передачи третьей географической позиции рельса на внешнюю вычислительную систему и приема обновленных данных геометрии пути от вычислительной системы.
12. Система контроля пути по п. 10, в которой процессор сконфигурирован для определения в качестве данных геометрии пути центральной линии пути, расстояния между соседними линиями пути, уклона, ширины колеи, продольного уровня.
13. Способ контроля рельсового пути, причем упомянутый способ исполняется системой контроля пути, установленной на транспортном средстве, включающий в себя этапы, на которых:
определяют географическую позицию упомянутой системы в ходе по меньшей мере одного прохода транспортного средства по пути;
определяют позицию по меньшей мере одного рельса относительно системы контроля пути и позицию по меньшей мере одного рельса и окружения относительно системы контроля пути в ходе по меньшей мере одного прохода;
определяют по меньшей мере за один проход первую позицию рельса с географической привязкой на основе географической позиции упомянутой системы и позиции по меньшей мере одного рельса относительно упомянутой системы;
определяют по меньшей мере за один проход вторую позицию рельса с географической привязкой на основе географической позиции системы контроля пути и позиции по меньшей мере одного рельса и окружения относительно системы контроля пути;
определяют третью позицию рельса с географической привязкой на основе первой и второй позиций рельса с географической привязкой и соответствующих данных геометрии пути с географической привязкой;
получают при дополнительном проходе данные геометрии пути, связанные с каждой позицией рельса относительно системы контроля пути, и выходные данные блока измерения позиции и ориентации;
обновляют на основе третьей позиции рельса с географической привязкой данные геометрии пути, полученные при дополнительном проходе; и
сохраняют обновленные данные геометрии пути на носителе информации.
14. Способ по п. 13, дополнительно содержащий этапы, выполняемые по любому из пп. 2-12.
| WO 2018208153 A1, 15.11.2018 | |||
| AU 2017131219 A1, 11.04.2019 | |||
| US 20100004804 A1, 07.01.2010 | |||
| СПОСОБ ДИАГНОСТИКИ РЕЛЬСОВОГО ПУТИ И СИНХРОНИЗАЦИИ РЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ | 2018 |
|
RU2680927C1 |
| СПОСОБ ИЗМЕРЕНИЯ И ИЗОБРАЖЕНИЯ ГЕОМЕТРИИ ПУТИ СИСТЕМЫ РЕЛЬСОВОГО ПУТИ | 2015 |
|
RU2682953C2 |
