Ссылки на родственные заявки
Настоящая заявка притязает на приоритет заявки US 13/315591, зарегистрированной 9 декабря 2011 г. и целиком включенной в настоящую заявку посредством ссылки.
Область и уровень техники
Для сборки трубопроводов и колонн труб, спускаемых в скважину, резьбовые соединения обычно используются вследствие недостатка времени и отсутствия менее затратных альтернатив. Например, в современных процессах сварки труб для скважин требуется по меньшей мере частично разобрать сварочный аппарат после каждой сварки, что имеет следствием существенные задержки при сборке колонны труб. Хотя использование резьбовых соединений компонентов в целом позволяет сократить время сборки, качество этих соединений ухудшается за период эксплуатации более быстро, чем качество сварных швов, что выражается, например, в нарушении герметичности соединений, ранее непроницаемых для флюидов. Проблемы обоих этих типов соединений усугубляются неточным выравниванием (например, осевым, радиальным, вращательным и т.д.) компонентов перед их соединением. Поэтому всегда востребованы усовершенствования, относящиеся к соединениям между трубными компонентами и позволяющие улучшить качество, сократить время сборки, повысить эффективность затрат и т.д.
Краткое описание сущности изобретения
В настоящем изобретении предлагается система для выравнивания и соединения компонентов, включающая опорный узел, измерительное устройство, соединенное с опорным узлом и выполненное с возможностью осуществления пространственного анализа первого трубного компонента относительно второго трубного компонента для определения вектора их пригонки друг к другу, выравнивающее устройство, соединенное с опорным узлом, выполненное с возможностью обмена данными с измерительным устройством и содержащее группу исполнительных органов, расположенных параллельно и выполненных с возможностью перемещения по меньшей мере одного из первого и второго трубных компонентов относительно другого трубного компонента для соосного расположения первого и второго трубных компонентов в соответствии с вектором пригонки, и соединительное устройство, соединенное с опорным узлом и выполненное с возможностью соединения первого и второго трубных компонентов друг с другом.
Кроме того, в настоящем изобретении предлагается система для выравнивания компонентов, включающая опорный узел, измерительное устройство, соединенное с опорным узлом и выполненное с возможностью осуществления пространственного анализа первого трубного компонента относительно второго трубного компонента для определения вектора их пригонки друг к другу, и выравнивающее устройство, соединенное с опорным узлом, выполненное с возможностью обмена данными с измерительным устройством и содержащее группу исполнительных органов, расположенных параллельно и выполненных с возможностью перемещения первого трубного компонента относительно второго трубного компонента для соосного расположения первого и второго трубных компонентов в соответствии с вектором пригонки, причем опорный узел расположен в непосредственной близости к скважине, а система выполнена с возможностью ориентирования первого и второго трубных компонентов для ввода в скважину.
Краткое описание чертежей
Приведенное ниже описание не подразумевает никаких ограничений и содержит ссылки на приложенные чертежи, на которых схожим элементам присвоены схожие численные ссылочные обозначения и на которых показано:
фиг. 1 - система для выравнивания и соединения двух компонентов согласно настоящему изобретению,
фиг. 2 - схематическое изображение нарушения соосности между первым и вторым трубными компонентами,
фиг. 3 - вид в поперечном разрезе системы, показанной на фиг. 1,
фиг. 4 - два компонента, пространственное положение которых анализируется приемопередающим блоком измерительного устройства,
фиг. 5 - два компонента с нарушением соосности, выравниваемые для получения наилучшей пригонки между ними,
фиг. 6А, 6Б - обрабатывающее устройство, выравниваемое относительно одного из компонентов для обработки,
фиг. 7-11 - различные варианты осуществления системы для выравнивания двух компонентов согласно настоящему изобретению.
Подробное описание вариантов осуществления изобретения
Ниже приведено подробное описание вариантов осуществления устройства и способа, предлагаемых в настоящем изобретении и представленных с помощью иллюстративных и неограничивающих примеров со ссылками на приложенные чертежи.
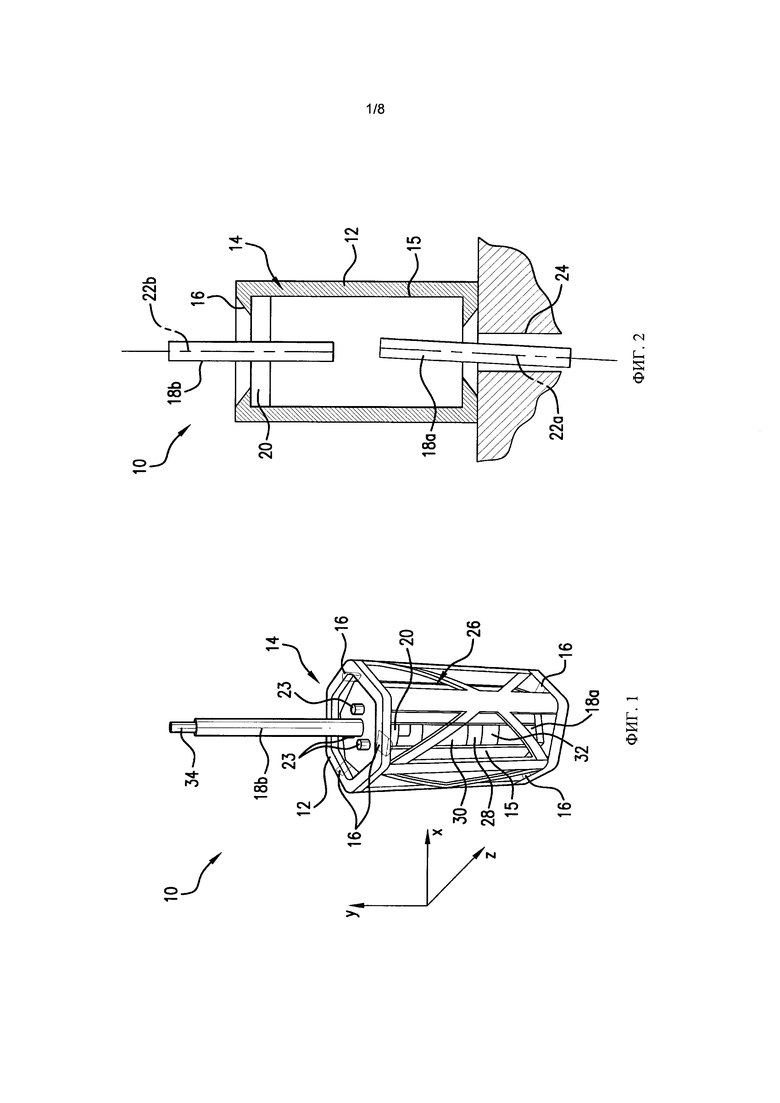
На фиг. 1 показана система 10 для выравнивания и соединения. Система 10 включает основание 12, неподвижно смонтированное на полу буровой вышки или установленное в качестве составной части последнего на буровой площадке. В альтернативных вариантах осуществления основание 12 может располагаться в другом месте и использоваться для соединения друг с другом трубных или иных компонентов, а скважина может быть горизонтальной, вертикальной или ориентированной любым иным образом.
В основании 12 размещено выравнивающее устройство 14, которое в иллюстрируемом варианте осуществления включает манипуляционную стойку 15, крепящуюся подвижно к основанию 12 посредством группы позиционирующих исполнительных органов 16. Стойка 15 и основание 12 представляют собой, например, опорные конструктивные элементы системы 10. Исполнительные органы 16 выполнены с возможностью обеспечения движения стойки 15 относительно основания 12. Исполнительные органы 16 могут представлять собой гидравлические, пневматические, магнитные, электронные, механические и иные устройства либо их комбинации, например электромагнитные, гидромеханические и т.п. устройства. Например, в одном варианте осуществления каждый из исполнительных органов 16 представляет собой гидравлический цилиндр, крепящийся к основанию 12 и стойке 15 посредством универсальных шарниров. В иллюстрируемом варианте осуществления предусмотрены шесть исполнительных органов 16 (один из которых не находится в поле зрения), расположенных по три у противоположных концов основания 12 и стойки 15. Конечно, в других вариантах осуществления изобретения может быть использовано любое другое число исполнительных органов 16 для обеспечения достаточной точности выравнивающего устройства 14 (например, движения стойки 15 относительно основания 12) и жесткости выравнивающего устройства 14 (и/или стойки 15) относительно основания 12. Кроме того, для получения требуемых статических и динамических характеристик системы 10 могут быть использованы элементы жесткости и демпфирующие элементы, например пружины, гидравлические и пневматические устройства, пластины, балки, стержни и т.д.
Использование системы 10 дает возможность выравнивания и соединения первого трубного компонента 18а и второго трубного компонента 18b. Например, в одном варианте осуществления компонент 18b неподвижно крепится к манипуляционной стойке 15 посредством зажимного устройства 20, тогда как компонент 18а фиксируется неподвижно относительно основания 12 посредством подходящего зажимного устройства, трения о стенки ствола скважины и т.п. Таким образом, компонент 18а может по существу служить в качестве базиса для последующих операций, например выравнивания компонента 18b относительно компонента 18а. Зажимное устройство 20 может быть выполнено, например, с возможностью радиального приложения сил сжатия, трения и т.д. к компоненту 18b посредством по меньшей мере одного зажимного исполнительного органа 23. Исполнительный (-е) орган (-ы) 23 может (-ут) относиться к любому подходящему типу, например представлять собой гидравлический (-е) цилиндр (-ы). Компоненты 18а и 18b в целом могут иметь форму труб, трубных элементов, компоновок низа бурильной колонны, любых других в целом трубообразных или выступающих в осевом направлении конструктивных узлов или составных частей этих узлов либо элементов, связанных с этими узлами, вне зависимости от формы поперечного сечения, вращательной симметрии и т.д.
На фиг. 2 схематически показана система 10, в которой компонент 18а, имеющий ось 22а, расположен с нарушением соосности относительно компонента 18b, имеющего ось 22b. Поскольку в иллюстрируемом варианте осуществления компонент 18b зажат в стойке 15, последняя располагается концентрически вокруг оси 22b. Тем не менее, в другом варианте осуществления оси манипуляционной стойки 15 и второго компонента 18b могут быть смещены на некоторый заданный или требуемый угол и зафиксированы под этим углом, например для большего соответствия кривизне скважины 24, в которую вводятся компоненты 18а и 18b. Например, оси манипуляционной стойки 15 и второго компонента 18b могут быть смещены на угол, составляющий приблизительно от нуля до десяти градусов. Следовательно, смещая стойку 15, например, с помощью позиционирующих исполнительных органов 16, можно также регулировать ориентацию компонента 18b относительно компонента 18а. Следует отметить, что нарушение соосности между осями 22а и 22b показано на чертеже лишь в целях иллюстрации и пояснения, так что его фактическая величина может быть как меньше, так и больше представленной.
В варианте осуществления, схематически показанном на фиг.2, выравнивающее устройство 14 расположено над скважиной 24, так что может быть обеспечено эффективное выравнивание компонентов 18а и 18b и соединение их вместе с другими компонентами в колонну, которая последовательно вводится в скважину 24. Конечно, система 10 может располагаться на полу буровой вышки и находиться над скважиной, но на некотором расстоянии от нее. В этом случае все вышесказанное относится также к отверстию в полу буровой вышки и т.д. В варианте осуществления, представленном на фиг. 2, компонент 18а частично введен в скважину 24 и зажат, закреплен, посажен или зафиксирован относительно скважины 24, пола буровой вышки и/или основания 12. Благодаря креплению компонента 18b к стойке 15 посредством зажимного устройства 20 соосное движение стойки 15 вдоль оси 22b приводит к изменению ориентации компонента 18b, чем обеспечивается выравнивание компонентов 18а и 18b друг относительно друга. Ясно, что в других вариантах осуществления компонент 18а может быть подвижным относительно компонента 18b либо оба этих компонента могут быть подвижными друг относительно друга, поскольку относительное движение между компонентами 18а и 18b является возможным. В других вариантах осуществления устройство 14 может быть размещено в любом другом подходящем положении или иметь любую другую ориентацию (например, горизонтальную, вертикальную и т.д.). Ясно также, что после того, как компонент 18b будет по меньшей мере частично введен в скважину, он станет похожим на компонент 18а, так что новый компонент может быть выровнен относительно компонента 18b и присоединен к противоположному концу последнего, после чего этот процесс повторяется по мере необходимости.
Исполнительные органы 16 в целом образуют параллельную или параллельно-последовательную (гибридную) кинематическую систему для выравнивающего устройства 14. Это означает, что, например, в параллельной кинематической системе используется группа исполнительных органов, действующих синхронно для выполнения изменения ориентации и/или положения требуемого компонента, определяемого, например, как среднее из движений всех исполнительных органов, в противоположность последовательной кинематической системе, в которой движения последовательно расположенных исполнительных органов, например, векторно складываются друг с другом для выполнения движения требуемым компонентом. Исполнительные органы 16 могут быть выполнены с возможностью обеспечения движения стойки 15 и, следовательно, компонента 18b относительно основания 12 и, следовательно, компонента 18а. Это движение может включать до шести степеней свободы, в том числе, например, смещение вдоль трех перпендикулярных координатных осей (например, x, y и z) и вращение вокруг каждой из этих осей (например, θx, 0y, θz; α, β, γ; могут быть использованы и другие символические обозначения).
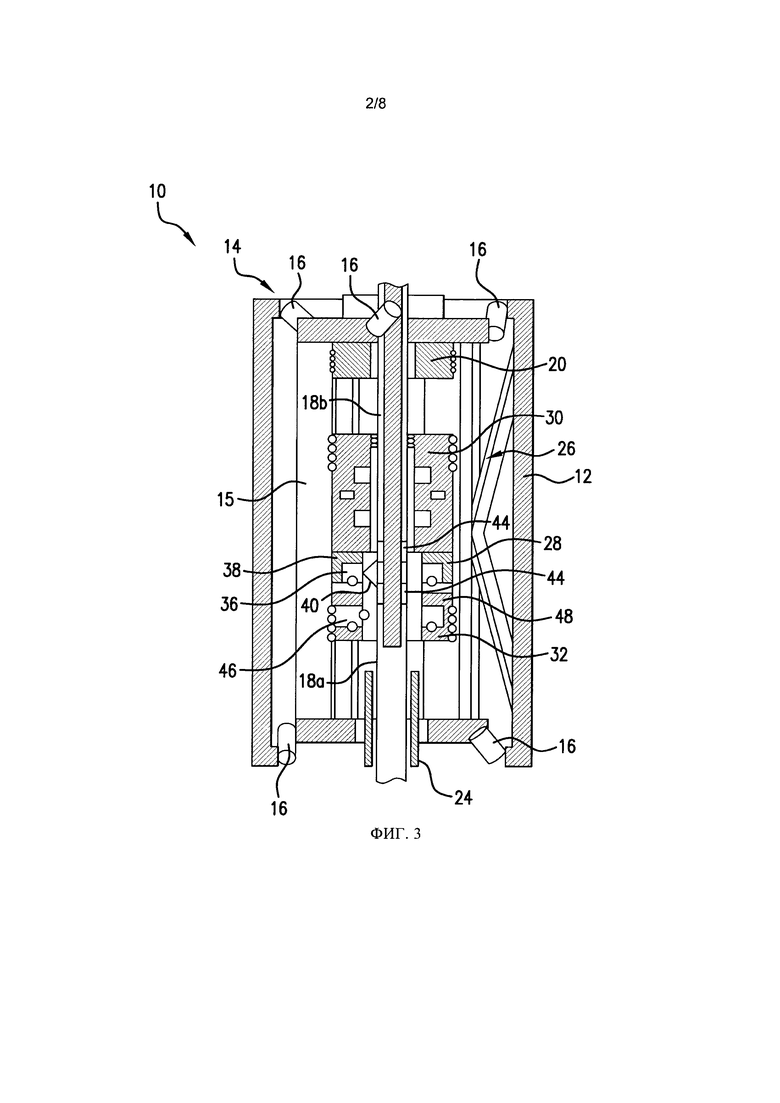
На фиг. 3 представлено более подробное изображение системы 10 в одном из вариантов осуществления, где эта система также включает узел 26, смонтированный с возможностью скольжения и/или вращения внутри стойки 15. Каждый из таких элементов с возможностью вращения или скольжения может включать соответствующие фиксирующие устройства, например механические, электрические, гидравлические, магнитные или иные фиксаторы. Движение узла 26 происходит вдоль и вокруг общей оси 22b стойки 15 и компонента 18b. Узел 26 включает измерительное устройство 28 для выполнения анализа прилегающих концов компонентов 18а и 18b с целью обеспечения их выравнивания и соединения. Как более подробно описано ниже, узел 26 может включать другие устройства, такие как соединительное устройство 30, обрабатывающее устройство 32, манипуляционный инструмент 34 и т.д.
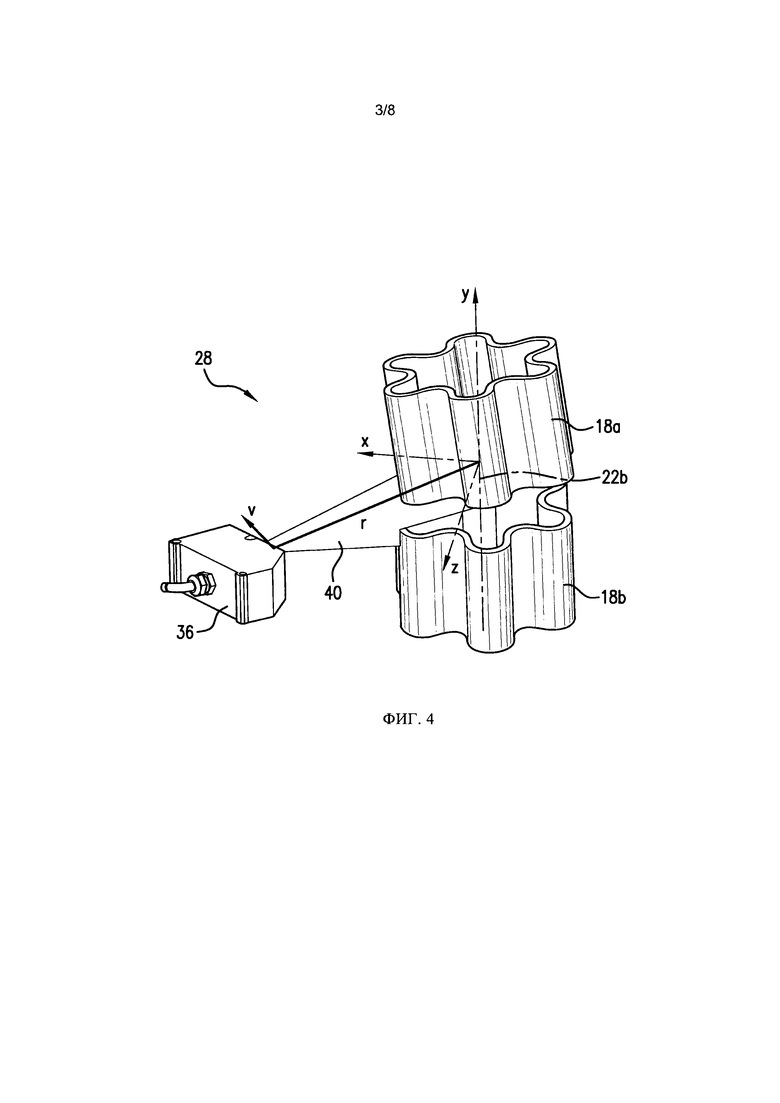
После первоначального подвода компонента 18b к компоненту 18а, например посредством манипуляционного инструмента 34, и прикрепления компонента 18b к стойке 15, например посредством зажимного устройства 20, выполняется пространственный анализ соответствующих концов компонентов 18а и 18b посредством измерительного устройства 28. Это означает, что выполняется определение положения, размеров, формы, ориентации и т.п. компонентов 18а и 18b друг относительно друга и/или относительно некоторого базиса (например, оси 22b, как описано ниже). Как показано на фиг. 3 и 4, в данном варианте осуществления измерительное устройство 28 выполнено в форме приемопередающего блока 36, размещенного в каретке 38. Конечно, можно также использовать отдельное передающее устройство (источник сигнала), например лазерный диод, и отдельное приемное устройство, например фоточувствительный элемент. В альтернативных вариантах осуществления приемопередающий блок 36 может быть заменен камерой с цифровым формированием изображения или каким-либо другим измерительным устройством. Как схематически показано на фиг. 3, приемопередающий блок 36 выполнен с возможностью передачи сигнала, например лазерного луча 40, и приема соответствующих сигналов, полученных в результате сканирования лазерным лучом 40 первого и второго трубных компонентов 18а и 18b, с целью определения приемопередающим блоком положения и ориентации этих компонентов 18а и 18b.
Каретка 38 выполнена, например, с возможностью вращения вокруг оси 22b, чем обеспечивается полнооборотное (360 градусов) сканирование приемопередающим блоком 36 границы раздела между компонентами 18а и 18b. Таким образом, получив ряд двухмерных отсчетов по всему периметру границы раздела между компонентами 18а и 18b, можно построить по существу трехмерную модель этих компонентов. Такая конструкция позволяет выполнить анализ поперечного сечения любой формы, а измерение обоих компонентов может производиться одновременно во время одного оборота приемопередающего блока 36 по периметру компонентов 18а и 18b. На каретке 38 могут быть установлены дополнительные датчики или приемопередающие устройства, которые можно использовать в качестве резервных или дублирующих устройств, для минимизации ошибок и т.д. Следует отметить, что возможен альтернативный вариант осуществления, в котором приемопередающий блок 36 или другой датчик является неподвижным, тогда как компонент 18b может вращаться, например посредством зажимного устройства 20.
Благодаря неподвижному креплению приемопередающего блока 36 к каретке 38 и регистрации угла поворота каретки 38 (например, путем наблюдения за исполнительными органами, управляющими вращением этой каретки), приемопередающий блок 36 всегда находится в фиксируемом положении относительно оси 22b, что показано базисным вектором r на фиг. 4. Сравнивая этот базисный вектор r с результатами сканирования положения, формы, размеров и ориентации компонента 18а, можно вычислить вектор коррекции или пригонки. Например, можно определить, как показано на фиг. 4, векторную составляющую v, соответствующую каждому угловому положению каретки 38. Накопленные значения векторной составляющей v в итоге суммируются либо, в альтернативном варианте, после выполнения анализа всех данных измерений определяется единственный вектор пригонки. В каждом случае компоненты 18а и 18b в примере, показанном на фиг. 4, имеют волнистую форму поперечного сечения. Эта форма считывается приемопередающим блоком 36, а компоненты выравниваются друг относительно друга в результате соответствующего поворота и смещения компонента 18b, определяемого вычисленным вектором пригонки.
После этого вектор пригонки передается в качестве команды для выравнивающего устройства 14 с целью выравнивания компонента 18b по оси 22а компонента 18а, например посредством одновременного приведения в действие позиционирующих исполнительных органов 16. Например, измерительное устройство 28 может содержать любые необходимые компьютерные компоненты или иметь возможность обмена данными с такими компонентами, включающими оперативные запоминающие устройства (ОЗУ), постоянные запоминающие устройства (ПЗУ), жесткие диски или другие запоминающие устройства для хранения данных, процессоры, арифметические или иные логические устройства, проводное или беспроводное коммуникационное оборудование и т.д.
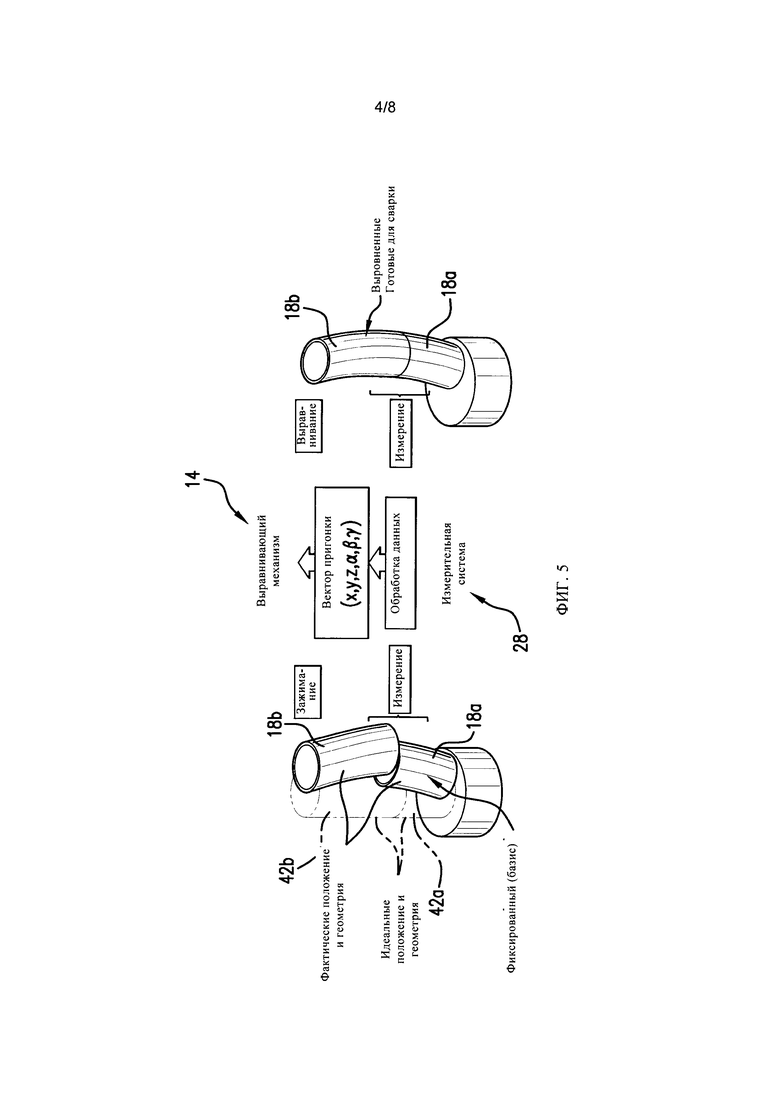
Поскольку геометрия компонентов 18а и 18b является, вероятно, не идеальной, можно продолжить определение векторов пригонки v до достижения наилучшего выравнивания или соответствия, включая различные дефекты компонентов 18а и 18b, такие как овальность, искривление, асимметричность и т.д. На фиг. 5 показаны в качестве примера компоненты 18а и 18b, имеющие существенные дефекты, а именно искривление и овальность. Для компонентов 18а и 18b здесь показана идеальная геометрия, соответственно 42а и 42b, которую система 10 пытается воспроизвести. Например, измерительное устройство 28 сначала анализирует границу раздела между компонентами 18а и 18b. После этого положения компонентов 18а и 18b сравниваются друг с другом и/или с идеальной геометрией 42а и 42b. Затем вычисляются векторы v коррекции, или пригонки (включая, например, переменные x, y, z, α, β, γ для определения шести степеней свободы). После этого векторы ν пригонки передаются в выравнивающее устройство 14, содержащее исполнительные органы 16, для осевого выравнивания компонентов 18а и 18b, за которым следует вращение компонента 18а для наилучшего совмещения любых овальностей, искривлений и т.п., разделенных между двумя компонентами 18а и 18b, как показано в правой части фиг. 5, с целью получения подходящей границы раздела для соединения этих компонентов.
После измерения и выравнивания два компонента 18а и 18b соединяют, например посредством соединительного устройства 30. В одном варианте осуществления соединительное устройство 30 представляет собой сварочное устройство для получения сварного шва на границе раздела между двумя компонентами 18а и 18b. В этом сварочном устройстве может быть использована любая требуемая технологии сварки, например электроннолучевая сварка, сварка давлением и т.д. Зажимное устройство 20 и/или исполнительные органы 16 могут быть приведены в действие для прочного удержания компонента 18b в определенном положении относительно компонента 18а во время сварки. В этом случае зажимное устройство 20 может принимать форму исполнительного органа последовательного действия, обеспечивающего стыковку концов компонентов 18а и 18b после первоначального параллельного взаимодействия позиционирующих исполнительных органов 16, выравнивающих компонент 18b относительно компонента 18а, как подробно описано выше. В вариантах осуществления, где устройство 30 представляет собой сварочное устройство, на манипуляционном инструменте 34 могут быть предусмотрены два уплотнительных элемента 44 для уплотнения границы раздела между компонентами 18а и 18b, например с целью содействия процессу сварки путем создания вакуума, защитной газовой камеры и т.д.
В других вариантах осуществления соединение компонентов может быть выполнено другими способами, например с помощью резьбы. В этих вариантах осуществления упомянутые выше овальность и искривление могут не иметь столь важного значения, поскольку впоследствии эти компоненты должны совершить относительное вращательное движение для свинчивания друг с другом. В этих вариантах осуществления соединительное устройство 30 может содержать зажимное приспособление или иную радиальную опору для содействия свинчиванию компонента 18b с компонентом 18а. С учетом вышесказанного, следует отметить, что зажимное устройство 20 может временно освобождать компонент 18b на период работы соединительного устройства 30. Кроме того, зажимное устройство 20 может быть выполнено с возможностью вращения вокруг оси 22b вместе с устройством 30, вращения вокруг оси 22b без использования устройства 30 и т.д. Далее, поскольку позиционирующие исполнительные органы 16 расположены параллельно, эти исполнительные органы можно использовать для передачи высокого крутящего момента компоненту 18b, например с предоставлением зажимному устройству 20 и/или соединительному устройству 30 возможности для почти полного свинчивания компонентов 18а и 18b, а позиционирующим исполнительным органам 16 - для завершающего приложения высокого крутящего момента, требуемого для надежного затягивания соединения компонентов перед их вводом в скважину.
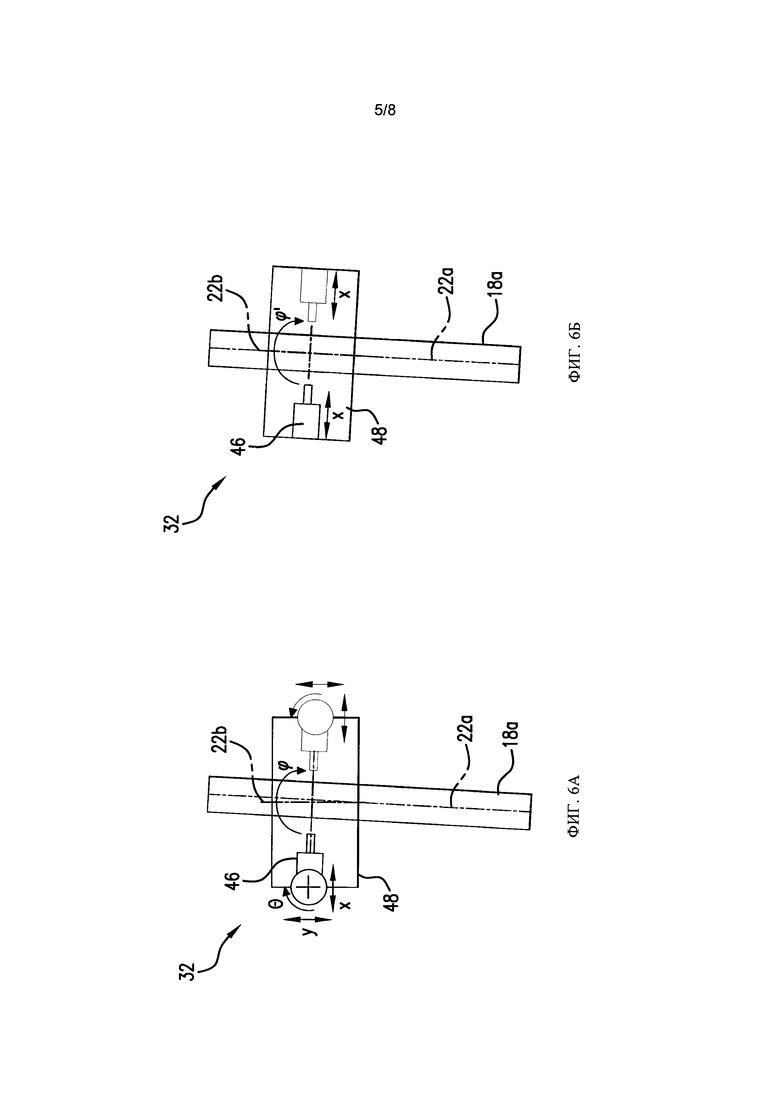
В некоторых вариантах осуществления перед соединением посредством соединительного устройства 30 используется обрабатывающее устройство 32, предусмотренное для первичной обработки компонентов (-а) 18а и/или 18b. Например, обрабатывающее устройство 32 включает инструмент 46, смонтированный на каретке 48. Инструмент 46 включает любое подходящее режущее, фрезерующее, сверлящее, обтачивающее, шлифующее, пилящее или иное средство для подготовки поверхностей компонентов, разделения трубных элементов, соединенных друг с другом, механической обработки компонентов, чистовой обработки поверхностей компонентов и т.д. Инструмент 46 может дополнительно включать или этому инструменту могут быть приданы средства для сварки, пайки, склеивания, сцепления или иного соединения составных частей, например составных частей компоновки низа бурильной колонны, с трубными компонентами 18а и 18b. Конструкция может включать несколько инструментов для одновременной обработки, которые могут иметь, например, индивидуальное или синхронное управление, например посредством кулачкового привода. Инструмент 46 может использоваться для окончательной отделки, очистки, придания формы, восстановления формы или иной подготовки компонентов 18а и 18b к сварке, удаления избыточного и радиально выступающего материала после сварки, обрезки концов компонентов 18а и 18b с целью получения новых поверхностей для соединения, а также для нарезки, восстановления или иного формирования резьбы у компонентов 18а и 18b и т.д. Каретка 48 используется для пригонки инструмента 46 к компонентам (-у) 18а и/или 18b, например путем перемещения в направлении x, y или z либо выполнения вращения вокруг них. Включение обрабатывающего устройства в состав узла 26, размещенного в стойке 15, позволяет выравнивающему устройству 14 благоприятным образом выровнять обрабатывающее устройство 32, как описано выше. Таким образом, как показано на фиг. 6А и 6Б, фиксация обрабатывающего устройства 32 вдоль оси 22b с последующим выравниванием оси 22b относительно оси 22а позволяет выровнять инструмент 46 относительно компонентов 18а и 18b с целью обеспечения более точной их обрезки. Кроме того, следует отметить, что обрабатывающее устройство 32 можно также использовать для разрезания имеющихся сварных швов или соединений в процессе автоматизированной разборки трубопровода или бурильной колонны, например при возникновении аварийной ситуации, в случае опасных погодных условий и т.д. Следует также отметить, что благодаря использованию измерительного устройства 28 обеспечивается возможность обработки устройством 32 компонентов, как обладающих, так и не обладающих вращательной симметрией, что достигается передачей обрабатывающему устройству 32 данных измерений, относящихся к положению, ориентации и т.д. компонентов 18а и 18b.
В некоторых вариантах осуществления обрабатывающее устройство 32 выполняет обработку до измерения и выравнивания, тогда как в других вариантах осуществления - после. Еще в одном варианте осуществления производится анализ компонентов 18а и 18b измерительным устройством 28 и осевое выравнивание их выравнивающим устройством 14 с последующей обработкой обрабатывающим устройством 32, вслед за чем выполняются повторные анализ и выравнивание для компенсации любых изменений, возникающих в результате обработки. Во время первоначального подвода компонента 18b к компоненту 18а, например с помощью канатов буровой установки и т.п., измерительное устройство 28 может оставаться неподвижным без вращения вокруг компонентов 18а и 18b, чтобы обеспечить предварительно выравнивание или сравнительно близкое размещение (например, в диапазоне измерения) компонента 18b относительно компонента 18а. После предварительного выравнивания может быть выполнено всеобъемлющее измерение, описанное выше. Следует отметить, что в различных вариантах осуществления описанные выше этапы могут, по мере необходимости, повторяться, меняться местами и т.д. Например, даже после соединения компонентов может быть выполнен их анализ посредством измерительного устройства 28 с последующим разделением посредством обрабатывающего устройства 32 в случае, например, возникновения ошибки, плохо выполненного сварного шва или резьбового соединения и т.д. В вариантах осуществления изобретения, представленных в настоящем описании, предлагаются адаптируемые к конкретным техническим требованиям, воспроизводимые и полностью или частично автоматизированные системы для выравнивания и соединения компонентов, обеспечивающие более эффективное выполнение монтажа, повышение безопасности благодаря нахождению персонала вдали от тяжелого оборудования и движущихся инструментов и т.д.
В варианте осуществления изобретения, представленном на фиг. 7, показана система 110. Многие элементы системы 110 имеют сходство с элементами системы 10, и им присвоены схожие ссылочные численные обозначения с добавленной спереди цифрой "1" (то есть к базовому числу добавлено 100). Если не указано иное, то приведенное выше описание соответствующих элементов, не содержащих в своем численном обозначении эту единицу, в целом относится и к элементам, ее имеющим. Система 110 включает зажимные устройства 120а и 120b, показанные на чертеже в форме тисков, хотя могут быть использованы и другие зажимные устройства. Аналогично зажимному устройству 20 в вариантах осуществления, описанных выше, зажимное устройство 120b для компонента 18b расположено в стойке 115. Зажимное устройство 120а для компонента 18а расположено в полу 113, смонтированном с основанием 112, например как часть пола буровой вышки, находящегося над скважиной.
На фиг. 8 показана система 210, в целом схожая с системами 10 и 110, описанными выше. Каждый элемент системы 210, схожий с элементами в описанных выше вариантах осуществления, имеет то же базовое ссылочное численное обозначение, но с первой цифрой "2" (то есть к базовому числу добавлено 200). Если не указано иное, то приведенное выше описание соответствующих элементов, не содержащих в своем численном обозначении эту двойку, в целом относится и к элементам, ее имеющим, поэтому это описание не повторяется. Система 210 включает выравнивающее устройство 214, содержащее первую часть 215а стойки и вторую часть 215b стойки. Первая часть 215а стойки в целом имеет сходство с описанной выше стойкой 115 и крепится подвижно к основанию 212 посредством группы позиционирующих исполнительных органов 216. Первая часть 215а стойки может включать, например, узел 26 или любое из входящих в него устройств, например измерительное устройство 28, соединительное устройство 30, обрабатывающее устройство 32 и т.д. Вторая часть 215b стойки включает зажимное устройство 220b и выполнена с возможностью отдельного перемещения посредством по меньшей мере одного дополнительного исполнительного органа 217, расположенного между частями 215а и 215b. Исполнительные органы 217 расположены, например, последовательно относительно исполнительных органов 216, так что система 210 представляет собой гибридную кинематическую систему. Благоприятный эффект от размещения зажимного устройства 220b в части 215b стойки, а других элементов и/или устройств (например, узла 26, измерительного устройства 28, соединительного устройства 30, обрабатывающего устройства 32 и т.д.) - в другой части 215а стойки, заключается в том, что перемещение компонента 18b исполнительными органами 217 в продольном направлении не препятствует размещению других элементов и устройств. Для достижения вышеуказанных преимуществ можно неподвижно расположить обе части 215а и 215b стойки с выравниванием вдоль оси 24b, причем относительное движение между частями 215а и 215b вдоль оси 24b будет возможным только посредством исполнительных органов 217. Таким образом, можно выполнить вращательное и осевое выравнивание компонента 18b, как описано выше, после чего прижать его в продольном направлении к компоненту 18а с помощью исполнительных органов 217 и с участием или без участия исполнительных органов 216, например для выполнения сварки или иного процесса соединения.
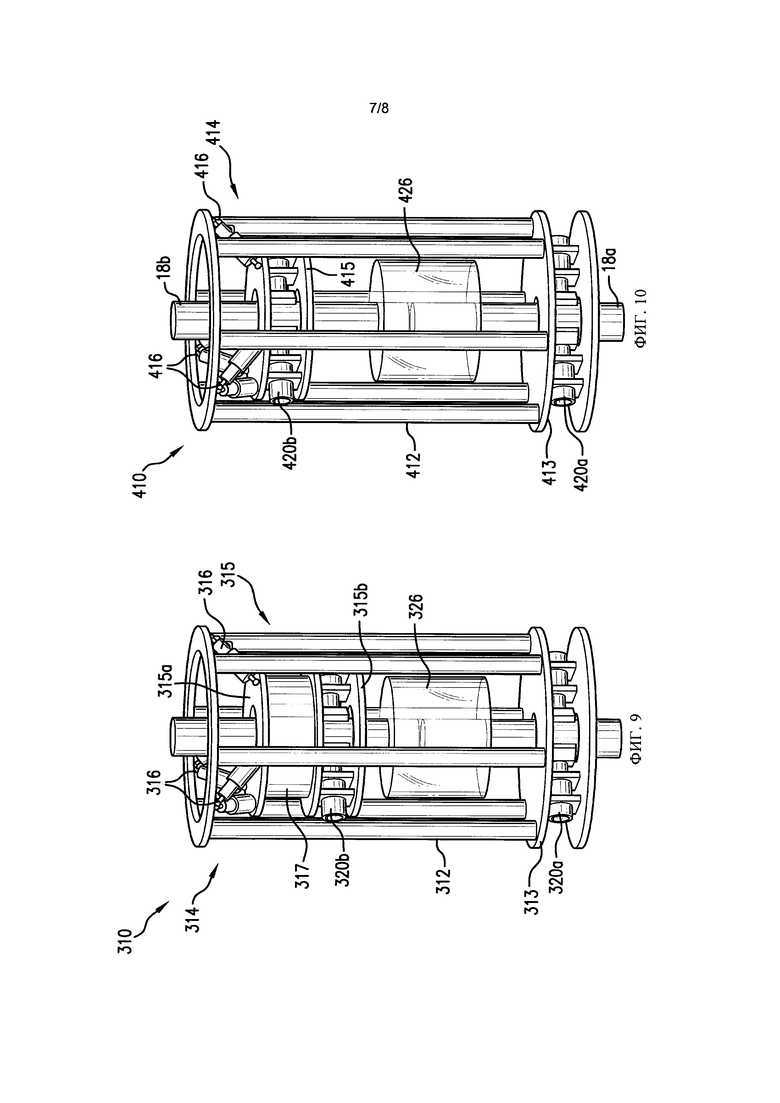
В варианте осуществления изобретения, представленном на фиг. 9, показана система 310. Каждый элемент системы 310, схожий с элементами в описанных выше вариантах осуществления, имеет то же базовое ссылочное численное обозначение, но с первой цифрой "3" (то есть к базовому числу добавлено 300). Если не указано иное, то приведенное выше описание соответствующих элементов, не содержащих в своем численном обозначении эту тройку, в целом относится и к элементам, ее имеющим, поэтому это описание не повторяется. Аналогично системе 210, стойка 315 системы 310 включает первую часть 315а и вторую часть 315b. Первая часть 315а соединена с основанием 312 посредством группы параллельных исполнительных органов 316. В иллюстрируемом варианте осуществления предусмотрено шесть исполнительных органов 316. В отличие от других вариантов осуществления, описанных выше, исполнительные органы 316 соединены только на одном конце стойки 315 и основания 312. В системе 310 предусмотрен дополнительный исполнительный орган 317 в форме привода вращательного движения, обеспечивающий соединение второй части 315b с первой частью 315а, выполненное с возможностью вращения. Часть 315b стойки включает зажимное устройство 320b, так что приведение в действие привода 317 имеет следствием вращение компонента 18b относительно компонента 18а. Таким образом, этот исполнительный орган 317 расположен последовательно относительно исполнительных органов 316, так что система 310 представляет собой гибридную кинематическую систему. Между компонентами 18а и 18b предусмотрен узел 326 (например, включающий одно или несколько устройств 28, 30, 32 и т.д.), обеспечивающий, как описано выше, измерение, анализ, обработку, соединение и т.д. Узел 326 может соединяться с частью 315b стойки, иметь отдельное управление и т.д.
В варианте осуществления изобретения, представленном на фиг. 10, показана система 410. Каждый элемент системы 410, схожий с элементами в описанных выше вариантах осуществления, имеет то же базовое ссылочное численное обозначение, но с первой цифрой "4" (то есть к базовому числу добавлено 400). Если не указано иное, то приведенное выше описание соответствующих элементов, не содержащих в своем численном обозначении эту четверку, в целом относится и к элементам, ее имеющим, поэтому это описание не повторяется. Аналогично системе 310, система 410 включает группу параллельных исполнительных органов, расположенных на одном конце основания 412, и только одну стойку 415. Однако система 410 не содержит привода вращательного движения, а вращение компонентов 18а и 18b друг относительно друга управляется вместо этого, например, исключительно исполнительными органами 416. Узел 426 (например, включающий одно или несколько устройств 28, 30, 32 и т.д.) может соединяться со стойкой 415, иметь отдельное управление и т.д.
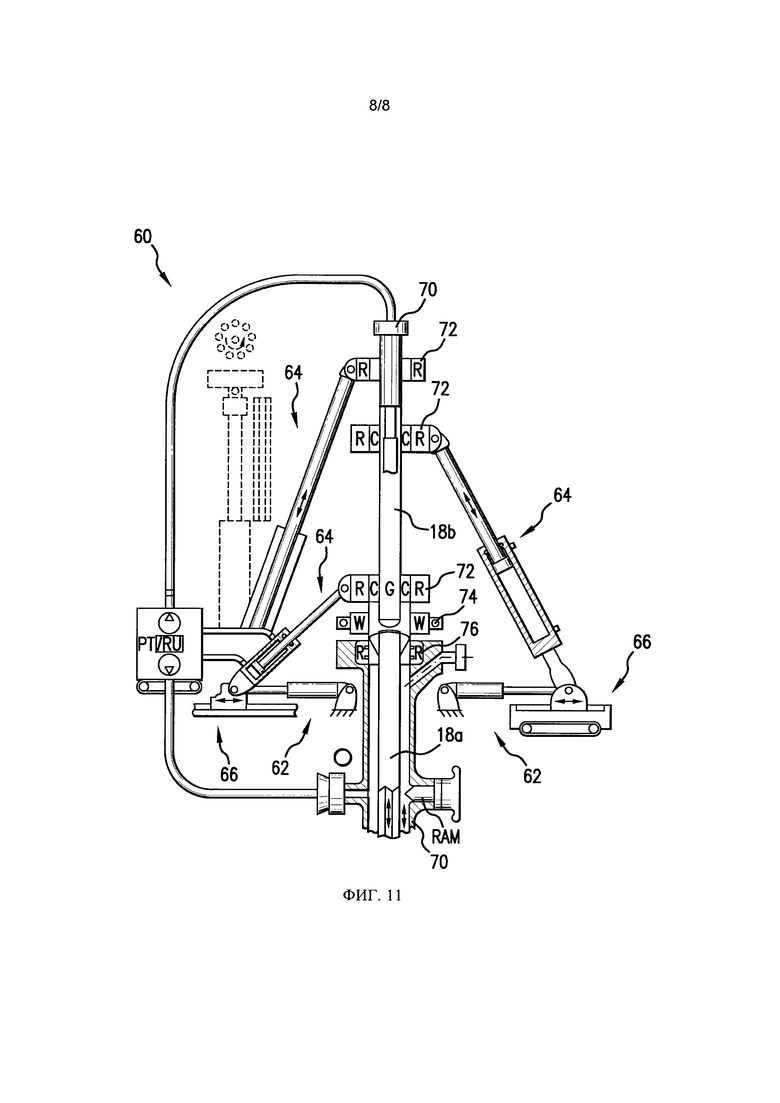
На фиг. 11 представлена система 60 в качестве одного из вариантов осуществления изобретения, который на первый взгляд кажется не похожим на описанные выше варианты осуществления. В частности, система 60 представляет собой пример гибридной кинематической системы. Тем не менее, из нижеследующего описания будет ясно, что системе 60 присущи многие особенности и преимущества вариантов осуществления, описанных выше. Система 60 включает первую группу исполнительных органов 62 и вторую группу исполнительных органов 64, причем каждый из исполнительных органов 64 связан с одним из исполнительных органов 62 (один исполнительный орган 62 находится вне поля зрения). Первая группа исполнительных органов 62 расположена относительно второй группы исполнительных органов 64 последовательно, тогда как исполнительные органы 64 второй группы расположены параллельно друг другу. Каждый из первых исполнительных органов 62 соединен с одним концом одного из вторых исполнительных органов 64, например в направляющей или ползуне 66. Направляющие 66 и исполнительные органы 62 крепятся, например, к основанию 68 и располагаются, например, над противовыбросовым превентором 70, стволом скважины и т.д. или в непосредственной близости от них.
Для прикрепления каждого из исполнительных органов 64 к компоненту 18b предусмотрено несколько зажимных устройств 72. Следует отметить, что вместо использования простирающихся в продольном направлении наружных опорных балок и прочих элементов несущей конструкции, присутствующих в каждой из показанных стоек 15, 15а и 15b, в данном случае предусмотрена непосредственная фиксация системы 60 на компоненте 18b, благодаря чему обеспечивается соосное расположение каждого из зажимных устройств 72 и компонента 18b. Использование в конструкции узла 74, включающего, например, измерительное устройство 28, соединительное устройство 30, обрабатывающее устройство 32 и т.д., и прикрепление узла 74 к одному из зажимных устройств 72 обеспечивают те же преимущества, что и в описанных выше вариантах осуществления, поскольку узел 74 и, следовательно, все требуемые устройства выравниваются относительно компонента 18b для выполнения обработки, измерения, соединения и т.д. Кроме того, с учетом вышесказанного, следует отметить, что путем надлежащего крепления исполнительных органов 62 и направляющих 66, при котором, например, направления действия по меньшей мере некоторых из исполнительных органов 62 не параллельны направлениям действия остальных исполнительных органов 62, и исполнения зажимных устройств 72 с возможностью по меньшей мере частичного поворота обеспечивается возможность получения шести степеней свободы.
Система 60, показанная на фиг. 11, обладает еще одним благоприятным отличительным признаком. А именно, система 60 включает выполненное с возможностью вращения зажимное устройство 76 для компонента 18а. Это поворотное зажимное устройство 76 размещается, например, в области противовыбросового превентора 70. Специалисту в данной области будет ясно, что все описанные выше зажимные устройства для компонента 18а, например зажимные устройства 120а, 220а, 320а, 420а и т.д., можно аналогичным образом модифицировать и сделать поворотными, например включив в их состав устройство, схожее с устройством 76 (либо с приводом 317 и т.п.). Поворотное зажимное устройство 76 позволяет компоненту 18а, который по меньшей мере частично введен в скважину (или прикреплен к бурильной колонне, введенной в скважину), вращаться вместе с компонентом 18b. Это благоприятным образом позволяет, например, обоим компонентам 18а и 18b вращаться одновременно с одной и той же скоростью для выполнения сваривания этих компонентов друг с другом путем использования таких процессов, как лазерная сварка, электронно-лучевая сварка и т.д. Устройство 76 позволяет также, например, компонентам 18а и 18b вращаться в противоположных направлениях или с разной скоростью (например, один из них вращается с высокой скоростью, а другой - с низкой) для обеспечения более эффективного выполнения сварки трением или свинчивания компонентов 18а и 18b друг с другом. Кроме того, вращение компонента 18а во время соединения уменьшает вероятность прихвата бурильной колонны, включающей этот компонент, под действием перепада давления в скважине, улучшает транспортировку обломков выбуренной породы во время бурения и сокращает или устраняет перерывы между процессами бурения или установки бурильной колонны и процессом соединения. Благодаря надежной фиксации компонента 18а на его конце, различного рода изгибы и т.п., возникающие в бурильной колонне, соединенной с компонентом 18а, во время ее вращения, не оказывают влияния на конец компонента 18а, чем обеспечивается возможность выравнивания и соединения. В другом примере осуществления упомянутые выше устройства, например измерительное устройство 28, соединительное устройство 30 и/или обрабатывающее устройство 32, могут вращаться в направлении, противоположном направлению вращения компонентов 18а и 18b, для еще большего увеличения скорости выполнения анализа, подготовки, обработки или соединения компонентов 18а и 18b.
Хотя настоящее изобретение описано со ссылками на примеры его осуществления, специалистам в данной области будет ясно, что в представленных вариантах осуществления могут быть выполнены, в пределах объема изобретения, различные изменения и замены его элементов соответствующими эквивалентами. Кроме того, могут быть выполнены различные модификации с целью адаптации конкретных ситуаций или материалов к идеям настоящего изобретения в пределах его объема. Поэтому подразумевается, что настоящее изобретение не ограничивается конкретным вариантом осуществления, рассматриваемым в качестве наилучшего для его реализации, а включает все варианты осуществления, охватываемые формулой изобретения. Кроме того, на чертежах и в описании представлены примеры осуществления изобретения, применительно к которым могут быть использованы специальные термины, которые, если не указано иное, употребляются лишь в качестве родового понятия и в описательном смысле, а не с целью ограничения, вследствие чего они не ограничивают объем изобретения. Далее, термины "первый", "второй" и т.д. не означают введения какого-либо порядка или приоритета, а используются для того, чтобы отличить один элемент от другого. Наконец, использование единственного или множественного числа означает не ограничение по количеству, а наличие по меньшей мере одного из упомянутых элементов.

Группа изобретений относится к системам для выравнивания и соединения компонентов для сборки трубопроводов и колонн труб, спускаемых в скважину. Технический результат заключается в улучшении качества и сокращении времени сборки трубных компонентов. Система для выравнивания и соединения компонентов содержит: опорный узел; измерительное устройство, соединенное с опорным узлом и выполненное с возможностью осуществления пространственного анализа первого трубного компонента относительно второго трубного компонента для определения вектора их пригонки друг к другу; выравнивающее устройство, соединенное с опорным узлом, выполненное с возможностью обмена данными с измерительным устройством и содержащее группу исполнительных органов, установленных параллельно с возможностью перемещения по меньшей мере одного из первого и второго трубных компонентов относительно другого трубного компонента для соосного расположения первого и второго трубных компонентов в соответствии с вектором пригонки; и соединительное устройство, соединенное с опорным узлом и выполненное с возможностью соединения первого и второго трубных компонентов друг с другом. 2 н. и 26 з.п. ф-лы, 11 ил.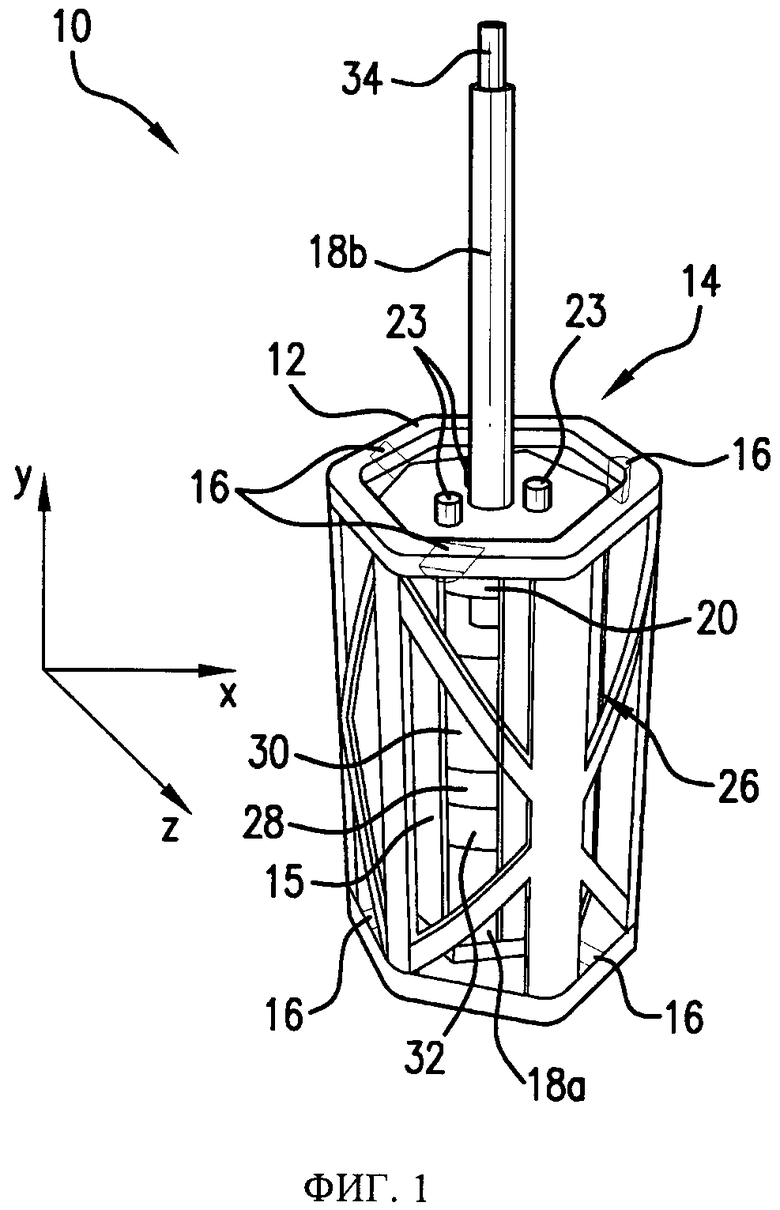
1. Система для выравнивания и соединения компонентов, содержащая:
опорный узел;
измерительное устройство, соединенное с опорным узлом и выполненное с возможностью осуществления пространственного анализа первого трубного компонента относительно второго трубного компонента для определения вектора их пригонки друг к другу;
выравнивающее устройство, соединенное с опорным узлом, выполненное с возможностью обмена данными с измерительным устройством и содержащее группу исполнительных органов, установленных параллельно с возможностью перемещения по меньшей мере одного из первого и второго трубных компонентов относительно другого трубного компонента для соосного расположения первого и второго трубных компонентов в соответствии с вектором пригонки; и
соединительное устройство, соединенное с опорным узлом и выполненное с возможностью соединения первого и второго трубных компонентов друг с другом.
2. Система по п. 1, в которой опорный узел представляет собой манипуляционную стойку, крепящуюся подвижно к основанию посредством группы исполнительных органов.
3. Система по п. 2, в которой первый трубный компонент крепится к основанию, а второй трубный компонент крепится к манипуляционной стойке.
4. Система по п. 2, в которой второй трубный компонент расположен неподвижно и соосно с манипуляционной стойкой.
5. Система по п. 2, в которой первый трубный компонент неподвижно зафиксирован под заданным углом относительно соответствующих осей манипуляционной стойки и второго трубного компонента.
6. Система по п. 1, в которой измерительное устройство, выравнивающее устройство, соединительное устройство или комбинации, по меньшей мере, с одним из упомянутых устройств выполнены с возможностью перемещения вдоль оси второго трубного компонента.
7. Система по п. 1, в которой опорный узел содержит первую часть стойки и вторую часть стойки, причем первая часть стойки крепится к основанию посредством группы исполнительных органов, а вторая часть стойки крепится к первой части стойки посредством по меньшей мере одного дополнительного исполнительного органа.
8. Система по п. 7, в которой первый трубный компонент крепится к основанию, а второй трубный компонент крепится ко второй части стойки.
9. Система по п. 7, в которой первая часть стойки и вторая часть стойки расположены соосно, а дополнительный исполнительный орган обеспечивает продольное перемещение между первой и второй частями стойки вдоль общей оси.
10. Система по п. 1, в которой измерительное устройство может совершать оборот по периметру границы раздела между первым и вторым трубными компонентами.
11. Система по п. 1, в которой измерительное устройство включает передающее устройство и приемное устройство.
12. Система по п. 11, в которой в передающем и приемном устройствах используются средства визуализации, оптические средства, лазерные средства или их комбинации.
13. Система по п. 1, в которой вектор пригонки включает шесть переменных.
14. Система по п. 13, в которой шесть переменных определяются вдоль каждой из трех перпендикулярных координатных осей и вращением вокруг каждого из трех осевых направлений.
15. Система по п. 1, в которой соединительное устройство может вращаться для обеспечения свинчивания первого и второго трубных компонентов друг с другом.
16. Система по п. 1, в которой соединительное устройство включает сварочное устройство для сваривания первого и второго трубных компонентов друг с другом.
17. Система по п. 1, содержащая обрабатывающее устройство для механической обработки одного или обоих из первого и второго трубных компонентов.
18. Система по п. 17, в которой обрабатывающее устройство выполнено с возможностью осуществления подготовки первого и второго трубных компонентов к сварке, удаления избыточного материала после сварки, разрезания первого и второго трубных компонентов для разборки, формирования резьбы в первом и втором трубных компонентах или комбинаций, включающих по меньшей мере одну из этих операций.
19. Система по п. 17, в которой обрабатывающее устройство выполнено с возможностью приваривания, припаивания или приклеивания компонентов к первому трубному компоненту, второму трубному компоненту или к комбинации, включающей по меньшей мере один из этих компонентов.
20. Система по п. 1, в которой первый трубный компонент, второй трубный компонент или комбинация, включающая по меньшей мере один из этих компонентов, представляют собой компоненты компоновки низа бурильной колонны.
21. Система по п. 1, в которой также обеспечивается вращательное выравнивание первого и второго трубных компонентов выравнивающим устройством.
22. Система по п. 19, в которой построение вектора пригонки включает рассмотрение формы поперечного сечения, овальности, искривления или комбинаций, включающих по меньшей мере одну из упомянутых характеристик первого и второго трубных компонентов, в процессе анализа, выполняемого измерительным устройством.
23. Система по п. 1, в которой измерительное устройство, выравнивающее устройство и соединительное устройство являются воспроизводимыми и используемыми в любом порядке.
24. Система по п. 1, содержащая по меньшей мере один исполнительный орган последовательного действия, последовательно соединенный с группой исполнительных органов, расположенных параллельно.
25. Система для выравнивания компонентов, содержащая:
опорный узел;
измерительное устройство, соединенное с опорным узлом и выполненное с возможностью осуществления пространственного анализа первого трубного компонента относительно второго трубного компонента для определения вектора их пригонки друг к другу; и
выравнивающее устройство, соединенное с опорным узлом, выполненное с возможностью обмена данными с измерительным устройством и содержащее группу исполнительных органов, установленных параллельно с возможностью перемещения первого трубного компонента относительно второго трубного компонента для соосного расположения первого и второго трубных компонентов в соответствии с вектором пригонки, причем опорный узел расположен в непосредственной близости к скважине, а система выполнена с возможностью ориентирования первого и второго трубных компонентов для ввода в скважину.
26. Система по п. 25, в которой второй трубный компонент представляет собой часть колонны труб, по меньшей мере частично введенную в скважину во время выравнивания первого и второго трубных компонентов.
27. Система по п. 26, в которой второй трубный компонент крепится к поворотному механизму для вращения первого трубного компонента и колонны труб во время выравнивания первого и второго трубных компонентов.
28. Система по п. 27, в которой вращение поворотного устройства обеспечивает оказание содействия в формировании сварного или резьбового соединения между первым трубным компонентом и вторым трубным компонентом после их выравнивания.
| US 7090254 B1, 15.08.2006 | |||
| Центратор | 1972 |
|
SU720134A1 |
| Устройство для центрирования труб | 1973 |
|
SU603740A1 |
| US 7509722 B2, 31.03.2009 | |||
| US 6141863 A, 07.11.2000 | |||
| US 5595248 A, 21.01.1997. | |||

