Изобретение относится к области гидроакустики и может быть использовано для построения навигационных гидроакустических станций освещения ближней обстановки, повышения их эффективности и расширения объема решаемых задач.
Известен метод измерения углового положения обнаруженного морского объекта с использованием гидролокатора, установленного на движущемся носителе, описанный в работе [Сташкевич А.П. Акустика океана. - 1966.].
Гидролокатор производит излучение зондирующего сигнала в момент времени t1, принимает эхосигнал и измеряет временную задержку между моментами излучения зондирующего сигнала и приема эхосигнала, определяет на момент времени t1 дистанцию D1 до объекта по величине временной задержки и известной скорости распространения звука. После чего определяют угол между направлением движения носителя и направлением на объект в вертикальной плоскости по положению характеристики направленности. Угол в вертикальной плоскости определяется при измерении амплитуды эхосигнала при сканировании характеристики направленности по вертикали по нескольким последовательным излучениям. За измеренное значение угла принимается угол, при котором амплитуда эхосигнала имеет максимальное значение. Определение направления на объект производится по величине максимальной амплитуды эхосигнала по результатам выбора последовательных измерений. Таким образом необходима гидроакустическая антенна, развитая в вертикальном направлении, и имеющая узкую характеристика направленности антенны в вертикальной плоскости, изменение положения характеристики направленности, которое достигается поворотом антенны, измерение амплитуды эхосигнала, выбор эхосигнала с максимальной амплитудой, определение направление положения объекта по углу, которому соответствует максимальная амплитуда эхосигнала.
Недостатком данного способа является то, что определение направления прихода отраженного сигнала, осуществляется последовательным поворотом антенны с узкой характеристикой направленности по вертикали и измерении амплитуды принятого эхосигнала по серии последовательных измерений и принятию решения при определении максимальной амплитуды эхосигнала.
Известен способ определения глубины погружения объекта [Тимошенков В.Г. Патент РФ №2660292 от 05.07.2018. Способ определения глубины погружения объекта. МПК G01S 15/58], в котором изложена процедура определения вертикального угла положения этого объекта. В соответствии с этим способом производят излучение зондирующего сигнала, прием эхосигнала от объекта, измерение временной задержки между моментами излучения зондирующего сигнала и приема эхосигнала, определение дистанции D до объекта по величине временной задержки и известной скорости распространения звука, измерение направления на объект в вертикальной плоскости, при этом измеряют глубину погружения гидролокатора Нгл., эхосигнал принимают одновременно вертикальной линейной антенной, формирующей статический веер узких характеристик направленности (ХН) в вертикальной плоскости и широкие ХН в горизонтальной плоскости, и горизонтальной линейной антенной, формирующей статический веер узких ХН в горизонтальной плоскости и широкие ХН в вертикальной плоскости, имеющих общий фазовый центр, определяют помеху по первому циклу приема входной информации всеми характеристиками направленности, выбирают порог обнаружения, определяют эхосигналы, превысившие порог по каждой характеристике направленности, измеряют дистанцию до объекта Dгор по горизонтальным ХН, в которых произошло превышение порога, измеряют дистанцию Dверт по вертикальным ХН в которых произошло превышение порога, определяют номер вертикальной пространственной ХН, для которой соблюдается неравенство Dверт < Dгор. + Нгл, а вертикальный угол положения обнаруженного подводного объекта определяют по положению этой характеристики.
Недостатком этого способа является то, что необходима антенн, которая формирует статический веер характеристик направленности по вертикали, что требует существенных материальных и технологических затрат. Большинство существующих гидролокаторов таких возможностей не имеет.
Задачей изобретения является упрощение процедуры измерений вертикального углового положения обнаруженного объекта.
Техническим результатом от использования изобретения является определение углового положение обнаруженного объекта при использовании ненаправленной или слабонаправленной антенны в вертикальной плоскости, не требующей развитого вертикального размера, а также сокращение времени измерений положения обнаруженного объекта по вертикали.
Технический результат достигается тем, что в способ содержащий излучение зондирующих сигналов, прием отраженных от обнаруженного морского объекта эхосигналов, измерение дистанции Д, гидролокатором, установленным на движущемся носителе, и определение вертикального угла положения подводного объекта введены новые признаки, а именно прием эхосигнала осуществляют гидроакустической антенной с всенаправленной или слабо направленной характеристикой направленности, измеряют горизонтальную скорость движения носителя гидролокатора V, измеряют время излучения первого зондирующего сигнала T1 и дистанцию Д1, измеряют время излучения второго зондирующего сигнала Т2 и дистанцию Д2, определяют путь VΔT, пройденный гидролокатором за время (T2-T1)=ΔT, а вертикальный угол положения обнаруженного морского объекта определяют как  где S - площадь треугольника со сторонами Д1, Д2 и VΔT,
где S - площадь треугольника со сторонами Д1, Д2 и VΔT,  , где
, где 
Поясним достижение технического результата
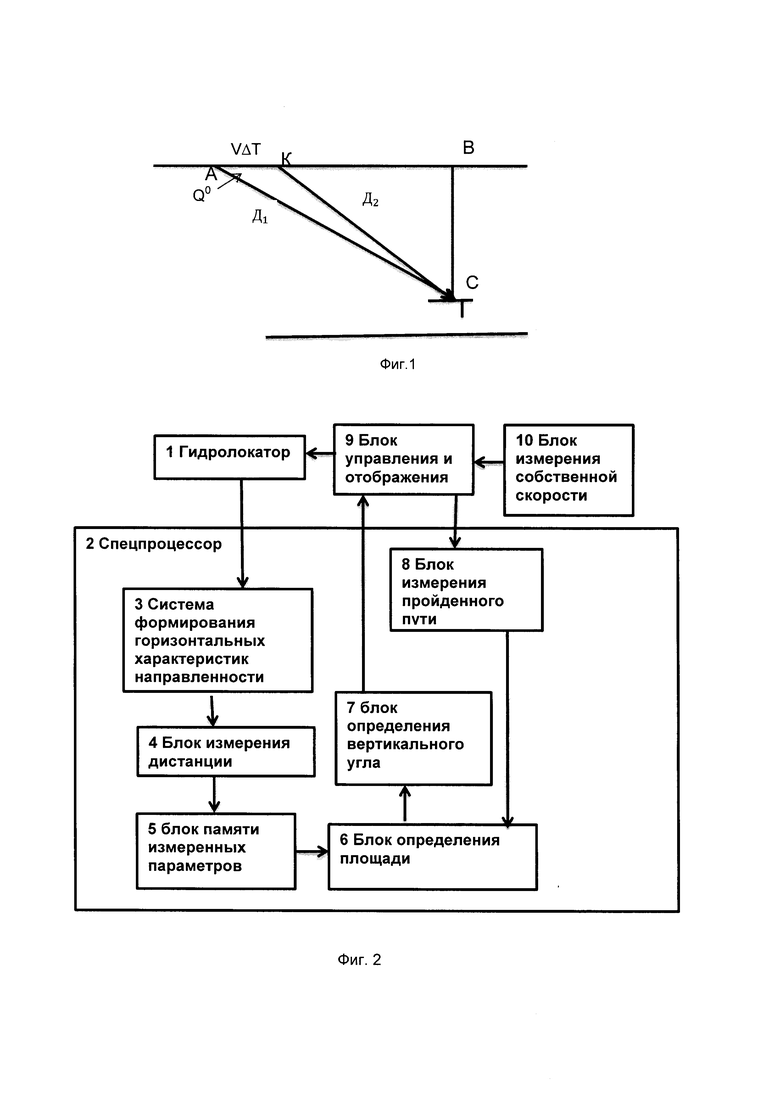
Существо предлагаемого технического решения можно рассмотреть с помощью фиг. 1. Гидролокатор излучает зондирующий сигнал в точке А в момент T1 и определяется дистанция Д1. Затем гидролокатор перемещается в точку К, пройдя расстояние равное VΔT, снова излучит зондирующий сигнал, после чего измеряется дистанция Д2 в момент Т2. По этим данным может быть определена площадь треугольника АКС равная  , где
, где  . С другой стороны площадь этого же треугольника можно определить по произведению сторон АС, что соответствует Д1, и АК, что соответствует VΔT, и синусу угла между ними sin Q0. S=2Д1 VΔT sin Q0. Приравняв эти две площади можно определить синус угла между ними
. С другой стороны площадь этого же треугольника можно определить по произведению сторон АС, что соответствует Д1, и АК, что соответствует VΔT, и синусу угла между ними sin Q0. S=2Д1 VΔT sin Q0. Приравняв эти две площади можно определить синус угла между ними  что однозначно определяет значение угла Q0, которое соответствует угловому положению обнаруженного объекта по вертикали.
что однозначно определяет значение угла Q0, которое соответствует угловому положению обнаруженного объекта по вертикали.
Сущность изобретения поясняется фиг. 1 и фиг. 2, где на фиг. 1 приведено пояснение к определению вертикального угла обнаруженного гидролокатором объекта, на фиг. 2. - блок сема устройства, реализующего предлагаемый способ.
Устройство (фиг. 2) содержит гидролокатор 1 соединенный с спецпроцессором 2. Спецпроцессор 2 содержит последовательно соединенные систему 3 формирования горизонтальных характеристик направленности, блок 4 измерения дистанции, блок 5 памяти измеренных параметров, блок 6 определения площади, блок 7 определения вертикального угла, также содержит блок 8 измерения пройденного пути. Устройство (фиг. 2) кроме этого содержит блок 10 измерения собственной скорости, который через блок 9 управления и отображения и соединен с гидролокатором 1. При этом второй выход блока 9 через блок 8 соединен со вторым входом блока 6, а выход блока 7 соединен с блоком 9 управления и отображения.
Гидролокатор 1 является известным устройством. Блок 2 цифровой спецпроцессор являются известными устройствами, которые предназначены для осуществления конкретных алгоритмов обработки с использованием аппаратных решений и жесткой логикой вычислений. Их применение повышает быстродействие цифровых вычислительных систем в несколько раз, и в большинстве случаев сокращает аппаратные затраты. Описания спецпроцессоров приведены в книге [Корякин Ю.А. Смирнов С.А. Яковлев Г.В. «Корабельная гидроакустическая техника». СПб. Наука. - 2004]. Там же приведено описание гидроакустических комплексов, построенных на основе спецпроцессоров [стр. 296., стр. 328]. С использованием этих же процессоров могут быть реализованы все введенные блоки предлагаемого изобретения.
Блоки 3, 4, 5, 6, 7, 8 могут быть реализованы с использованием цифровой обработки на основе пакетов расширения «Матлаб», которые обеспечивают последовательную процедуру вычисления заданных алгоритмов, рассмотрены в пособии [Сергиенко А.Б. Цифровая обработка сигналов. - БХВ-Санкт Петербург, 2011].
С помощью устройства (фиг. 2) предлагаемый способ может быть реализован следующим образом.
С блока управления и отображения 9 подается сигнал на гидролокатор 1, который формирует и излучает зондирующий сигнал. Отраженный эхосигнал принимается антенной гидролокатора и передается в спецпроцессор 2, где в блоке 3 формируются система горизонтальных характеристик направленности, что обеспечивает обнаружение всех эхосигналов в горизонтальном направлении. С выхода пространственных каналов эхосигналы поступают в блок 4 измерения дистанции, где производится обнаружение эхосигналов превысивших порог и измерение дистанции по времени между излучением зондирующего сигнала и временем превышением выбранного порога. Полученная оценка дистанции передается в блок 5 памяти, где запоминается оценка дистанции и пространственный канал по горизонтали при каждом измерении. Гидролокатор 1 работает с известным временем излучения, поэтому эхосигналы принятые гидролокатором автоматически будут поступать в блок памяти 5 и передаваться в блок определения площади 6. На второй вход блока 6 из блока 8 поступает значение пройденного расстояния между излученными зондирующими сигналами. Для этой цели в блоке 10 производится измерение собственной скорости, которое передается через блок управления и отображения в блок 8 при каждом излучении зондирующего сигнала. Таким образом, в блоке 7 производится определение вертикального угла пространственного положения обнаруженного объекта, которое передается в блок 9 управления и отображения.
Измерения собственной скорости движения осуществляется известными современными измерителями, погрешность измерения собственной скорости составляет величину меньше 0,01 м/с. [Богородский А.В., Островский Д.Б. Гидроакустические навигационные и поисково-обследовательские средства // С-Пб.: Издательство СПб ГЭТУ «ЛЭТИ. - 2009. - 48 с.].
Таким образом, по нескольким последовательным излучениям гидролокатора может быть реализована процедура измерения вертикального угла положения обнаруженного объекта в пространстве.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обработки гидролокационной информации | 2018 |
|
RU2694269C1 |
| Способ определения глубины погружения объекта | 2017 |
|
RU2660292C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ЗВУКА | 2016 |
|
RU2631234C1 |
| Способ определения скорости звука гидролокатором по трассе распространения сигнала до цели | 2017 |
|
RU2650829C1 |
| ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ НЕПОДВИЖНОГО ОБЪЕКТА | 2015 |
|
RU2590932C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЛУБИНЫ ОБЪЕКТА И ГИДРОЛОКАТОРОМ | 2013 |
|
RU2527136C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ ОБЪЕКТА | 2016 |
|
RU2625041C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОШИБКИ ОЦЕНКИ ДИСТАНЦИИ ГИДРОЛОКАТОРОМ | 2012 |
|
RU2516594C1 |
| Способ отображения гидролокационной информации | 2019 |
|
RU2724245C1 |
| ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ ХАРАКТЕРИСТИК ОБЪЕКТА НА ДНЕ | 2014 |
|
RU2582623C1 |
Использование: изобретение относится к области гидроакустики и может быть использовано для построения навигационных гидроакустических станций освещения ближней обстановки, повышения их эффективности и расширения объема решаемых задач. Сущность: в способе осуществляют излучение зондирующих сигналов, прием отраженных от обнаруженного морского объекта эхосигналов, измерение дистанции Д гидролокатором, установленным на движущемся носителе, и определение вертикального угла положения подводного объекта, прием эхосигнала осуществляют гидроакустической антенной с всенаправленной или слабонаправленной характеристикой направленности, измеряют горизонтальную скорость движения носителя гидролокатора V, измеряют время излучения первого зондирующего сигнала Т1 и дистанцию Д1, измеряют время излучения второго зондирующего сигнала Т2 и дистанцию Д2, определяют путь VAT, пройденный гидролокатором за время (T2-T1)=ΔT, а вертикальный угол положения обнаруженного морского объекта определяют как  где S - площадь треугольника со сторонами Д1, Д2 и VΔT,
где S - площадь треугольника со сторонами Д1, Д2 и VΔT,  , а
, а  Технический результат: возможность определения углового положения обнаруженного объекта при использовании ненаправленной или слабонаправленной антенны в вертикальной плоскости, не требующей развитого вертикального размера, а также сокращение времени измерений положения обнаруженного объекта по вертикали. 2 ил.
Технический результат: возможность определения углового положения обнаруженного объекта при использовании ненаправленной или слабонаправленной антенны в вертикальной плоскости, не требующей развитого вертикального размера, а также сокращение времени измерений положения обнаруженного объекта по вертикали. 2 ил.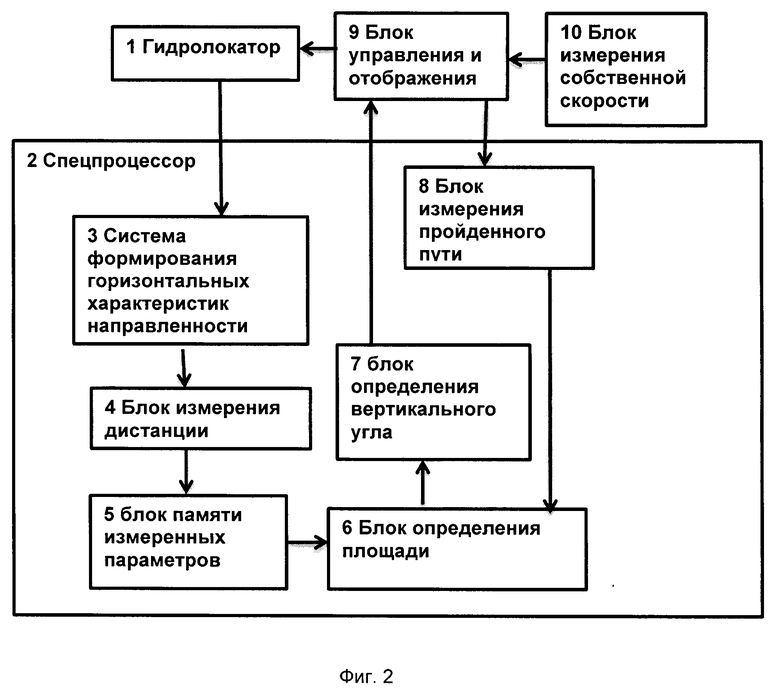
Способ измерения вертикального угла положения подводного объекта, содержащий излучение зондирующих сигналов, прием отраженных от обнаруженного морского объекта эхосигналов, измерение дистанции Д гидролокатором, установленным на движущемся носителе, и определение вертикального угла положения подводного объекта, отличающийся тем, что измеряют время излучения зондирующего сигнала Т2 и дистанцию Д2, определяют путь VΔT, пройденный гидролокатором за время (Т2-T1)=ΔT, а вертикальный угол положения обнаруженного морского объекта определяют как  где S - площадь треугольника со сторонами Д1, Д2 и VΔT,
где S - площадь треугольника со сторонами Д1, Д2 и VΔT,  , а
, а 
| Способ определения глубины погружения объекта | 2017 |
|
RU2660292C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ ОБЪЕКТА | 2012 |
|
RU2516602C1 |
| ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ АВТОНОМНОГО ПОДВОДНОГО АППАРАТА | 2015 |
|
RU2593651C1 |
| Устройство получения информации о шумящем в море объекте | 2017 |
|
RU2654365C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ ОБЪЕКТА | 2016 |
|
RU2625041C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЛУБИНЫ ОБЪЕКТА И ГИДРОЛОКАТОРОМ | 2013 |
|
RU2527136C1 |

