Изобретение относится к области гидроакустики и может быть использовано при проектировании и разработке систем активной гидролокации, для получения более полной информации о пространственном положении обнаруженных объектов.
Известен способ обработки сейсмоакустических сигналов по патенту РФ №2502092 от 20.12.2013, который содержит излучение взрывного сигнала на глубине, прием отраженных сигналов антенной, содержащей гидрофоны, расположенные на наружной поверхности земли, формирование характеристик направленности, обработку принятых сигналов и отображение в формате 3Д.
Недостатком этого решения является то, что излучается одиночный ненаправленный взрывной сигнал неподвижным источником и принимается неподвижной стационарной антенной эхосигналы, отраженные от неподвижных слоев, что не может быть использовано для отображения сигналов отраженных от подвижных объектов при излучении зондирующих сигналов подвижным гидролокатором.
Известна навигационная гидроакустическая станция освещения ближней обстановки (НГАС ОБО) по патенту РФ №2225991 от 24.12.2001 г. Станция реализует следующую последовательность операций: излучение сигнала, прием эхосигнала, предварительную обработку, измерение параметров эхосигнала, определение классификационных признаков, измерение скорости звука, прослушивание сигнала шумоизлучения, классификацию целей по измеренным классификационным признакам и отображение на индикаторе.
Недостатком этого патента является то, что отсутствует информация по положению цели в вертикальной плоскости.
Известна полезная модель «Навигационная гидроакустическая станция освещения ближней обстановки (НГАС ОБО) по патенту РФ №117646 от 27.06.2012. Станция реализует следующую последовательность операций: излучение сигнала, прием эхосигнала носовой антенной, кормовой антенной и крестообразной антенной, коммутацию входных сигналов от разных антенн, предварительную обработку, измерение параметров эхосигнала, определение классификационных признаков, измерение скорости звука, классификацию целей по измеренным классификационным признакам и отображение на индикаторе. При использовании крестообразной антенны обеспечивается обзор и отображения пространства в вертикальной плоскости.
Недостатком этого технического решения является то, что измерение параметров и принятие решения о наличии эхосигнала от цели производится оператором по виду отображаемых отметок на яркостном индикаторе по дальности и горизонтальным пространственным характеристикам направленности, по дальности и вертикальным пространственным характеристикам. Это дает представление о наличии цели одновременно по всей совокупности информации. Крестообразная антенна формирует косекансные характеристики направленности по горизонтали и по вертикали. Она имеет узкую характеристику направленности по одной координате и большую ширину характеристики направленности по другой, что не позволяет отображать пространственное положение обнаруженной цели по вертикали.
Известен гидролокационный способ обнаружения подводных объектов, движущихся с малой скоростью в контролируемой акватории по патенту РФ №2242021 от 15.07.2002. Этот гидролокационный способ обнаружения подводных объектов, движущихся с малой скоростью, включает последовательное облучение водного пространства гидроакустическими сигналами по различным направлениям с неподвижного гидролокатора, прием эхосигналов от объектов, фильтрацию и отображение на двухкоординатном индикаторе принятых эхосигналов, одновременно по М направлениям. При этом осуществляют К циклов «излучение - прием», на каждом цикле запоминают все принятые эхосигналы, дискретизируют по дистанции, отображают их на экране в виде яркостных отметок так, что по каждому из М направлений последовательно К раз отображается L элементов дистанции, сохраняют KL элементов и отображают на индикаторе L элементов последнего цикла излучения прием, а решение об обнаруженном объекта по М-ому направлению принимают по появлению на индикаторе трассы, образованной яркостными отметками эхосигналов, полученными в циклах «излучение - прием», классификацию неподвижных и малоподвижных объектов оператор осуществляет по наличию наклона трасс яркостных отметок.
Недостатком данного технического предложение является отсутствие объемного представления эхосигналов от обнаруженных объектов с учетом их пространственного положения по вертикали и горизонтали, что не позволяет проводить достоверное обнаружение и своевременную классификацию.
Задачей изобретения является обеспечение отображения всей поступающей информации в амплитудном виде по вертикали и по горизонтали в пределах дистанции обнаружения.
Технический результат заявленного изобретения заключается в повышении вероятности обнаружения и классификации принимаемых эхосигналов.
Для достижения указанного технического результата в способ отображения гидролокационной информации, содержащий излучение зондирующего сигнала, прием эхосигнала статическим веером М характеристик направленности (ХН), дискретизация входной информации и по каждому из М направлений К раз отображение L элементов дистанции на индикаторе по всем направлениям, введены новые признаки, а именно излучение зондирующего сигнала производят полуцилиндрической гидроакустической антенной, которая формирует одну широкую ХН по горизонтали и одну ХН по вертикали, обеспечивающую обзор пространства от поверхности до дна, прием эхосигналов осуществляют цилиндрической антенной, формирующий обзор пространства по горизонтали и по вертикали статическим веером характеристик направленности с образованием веера N характеристик направленности по вертикали шириной Q° и S горизонтальных характеристик шириной Y° по горизонтали в каждом вертикальном ярусе, при этом нижний вертикальный ярус S горизонтальных характеристик идентично повторяется во всех N вертикальных ярусах, по каждой характеристике направленности принимают последовательные дискретизированные временные отсчеты эхосигналов по L элементам дистанции, запоминают, определяют сигнал с максимальной амплитудой, нормируют все отсчеты относительно сигнала с максимальной амплитудой и после окончания обработки последовательно отображают на индикаторе по дистанции, по всем горизонтальным характеристикам направленности каждого вертикального уровня, начиная с нижнего, при этом с каждым последовательным временным циклом обработки очередного элемента по дистанции L уменьшают размер площади отображения на свободной части экрана индикатора, чем формируют объемное представление всей информации по дистанции, по горизонтали и по вертикали.
Как показало моделирование, оптимальным является обеспечение обзора по горизонтали в диапазоне 160 градусов S=20 характеристиками направленности шириной Y=8 градусов, а по вертикали 45 градусов N=15 характеристиками шириной Q=3 градуса каждая.
Поясним существо предлагаемого способа отображения гидролокационной информации.
В современных гидролокационных станциях, представленных в литературе Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев «Корабельная гидроакустическая техника», СПб., Наука. 2004 г. стр. 255, и в прототипе, информация выводится в двух координатах по времени (дистанции) и по горизонтальным каналам в пространстве, при этом отображается информация в яркостном виде. Яркость тем больше, чем больше амплитуда эхосигнала. Таким образом, представленная информация отображает положение эхосигнала от объекта на плоскости. Предлагается использовать дополнительную информацию, которую можно получить при формировании вертикального веера характеристик направленности. Однако, для формирования общей картины пространственного положения объектов необходимо выполнить дополнительные условия. Характеристики направленности в излучении и в приеме должны быть согласованы не только по горизонтали, но и по вертикали. Поэтому первой задачей является излучение зондирующего сигнала в фиксированном диапазоне углов по горизонтали таким образом, чтобы осветить всю глубину акватории по вертикали. Это достигается тем, что используется полуцилиндрическая антенна, которая формирует в излучении характеристики направленности в вертикальной плоскости порядка 45° и широкую характеристику направленности в горизонтальной плоскости в диапазоне 160°. Прием сигналов осуществляется цилиндрической приемной антенной, имеющей узкие характеристики направленности по горизонтали, обеспечивающие прием в диапазоне 160° и по вертикали в секторе углов 45°. Временные дискретизированные отсчеты эхосигналов последовательно во времени принимаются каждой пространственной горизонтальной характеристикой направленности, начиная от нижнего вертикального яруса и заканчивая верхним вертикальным ярусом последовательно и запоминаются. Все полученные отсчеты нормируются относительно отсчета с максимальной амплитудой. После чего вся амплитудная и пространственная информация последовательно выводится на индикатор таким образом, что на нижний край индикатора выводится амплитудная информация нижнего вертикального яруса, далее следует амплитудная информация по всем горизонтальным каналам второго вертикального яруса и т.д., а на верхний край индикатора амплитудная информация верхнего вертикального яруса. Таким образом, происходит отображение информации на индикаторе по горизонтальным характеристикам, по вертикальным характеристикам и по амплитуде. При наборе следующей временной информации L по дистанции происходит аналогичная обработка. Однако, для того, чтобы информация первого цикла обработки по дальности не смешивалась с каждым последующим циклом обработки, уменьшается размер площади отображения на свободном поле индикатора при поступлении очередного массива временного цикла обработки L по всем горизонтальным и вертикальным каналам. Такая процедура отображения связана с тем, что наибольшее число целей обнаруживаются на малой дистанции, поскольку имеет место большая мощность излученного зондирующего сигнала. Это обеспечивает большое отношение сигнал/помеха и большую вероятность превышения порога принятия решения в системах обнаружения. Поэтому при обнаружении большого числа целей на малой дистанции имеет смысл более подробно представлять оператору амплитудную информацию по горизонтали и по вертикали. Это касается, прежде всего, горизонтальных каналов нижнего яруса, где отображаются эхосигналы от донных объектов, и горизонтальных каналов верхнего яруса, где отображаются эхосигналы от надводных объектов. Такая процедура не исключает отображение эхосигналов от целей, которые расположены между дном и поверхностью.
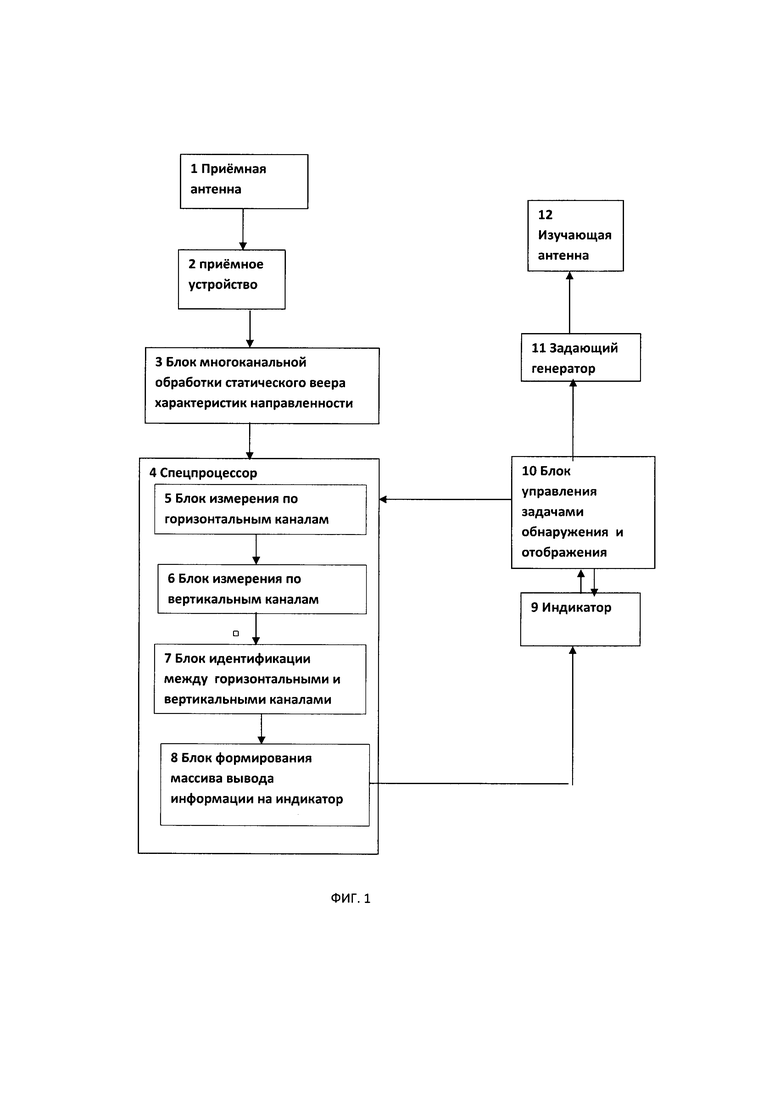
Сущность изобретения поясняется фиг. 1, на которой приведена блок-схема гидролокатора, реализующего предлагаемый способ.
Гидролокатор (фиг. 1) содержит последовательно соединенные приемную антенну 1, приемное устройство 2, блок 3 многоканальной обработки статического веера ХН, спецпроцессора 4. В состав спецпроцессора 4 входят последовательно соединенные блок 5 измерения по горизонтальным каналам, блок 6 измерения по вертикальным каналам, блок 7 идентификация между горизонтальными и вертикальными каналами, блок 8 формирования массива вывода информации на индикатор. Выход блока 8 соединен с первым входом индикатора 9. Устройство также содержит последовательно соединенные блок 10 управления задачами и отображения, задающий генератор 11 и излучающую антенну 12. Второй выход блока управления 10 соединен со вторым входом спецпроцессором 4, а его третий выход со вторым входом индикатора 9.
Реализацию способа целесообразно продемонстрировать на примере работы гидролокатора (фиг. 1).
Из блока 10 управления задачами и отображения поступает сигнал на задающий генератор 11, который формирует зондирующий сигнала определенной частоты, длительности и мощности, который поступает на излучающую антенну 12 и далее излучается в водное пространство. Полуцилиндрическая излучающая антенная 12 является известным устройством, которая используется в гидроакустической практике (М.Д. Смарышев, Ю.Ю. Добровольский «Гидроакустические антенны». Судостроение. Л. 1984. стр. 182). В силу того, что антенна имеет полуцилиндрическую форму обеспечивается излучение в горизонтальной плоскости в секторе порядка 160 градусов и в вертикальной плоскости в секторе порядка 45 градусов. Это позволяет в излучении освещать одновременно весь объем водного пространства в направлении движения гидролокатора. Эхосигналы от дна, от поверхности и от объектов, которые находятся в водной среде, по мере распространения зондирующего сигнала по дистанции поступают на цилиндрическую приемную антенну 1. Цилиндрические антенны являются известными устройствами, которые широко используются в гидроакустической практике (М.Д. Смарышев, Ю.Ю. Добровольский «Гидроакустические антенны». Судостроение. Л. 1984. стр. 226). Они позволяют формировать характеристики направленности и в горизонтальной плоскости и в вертикальной плоскости. На основе антенны 1, формируется статический веер характеристик направленности числом 20 в горизонтальной плоскости от 0° до 160° и в вертикальной плоскости в диапазоне 0°- 45° числом 15 относительно направления движения. Ширина характеристик направленности в горизонтальной плоскости составляет порядка 8°, что обеспечивает хорошее разрешение по горизонту, а по вертикали ширина характеристики направленности порядка 3°. Приемное устройство 2 принимает отраженные эхосигналы в выбранном частотном диапазоне, усиливает, по всем горизонтальным и вертикальным каналам и передает в блок 3 многоканальной обработки статического веера характеристик направленности. Последовательные временные дискретизированные отсчеты набираются по дистанции по всем горизонтальным и вертикальным каналам и запоминаются. Среди набранных отсчетов определяется отсчет с максимальной амплитудой, относительно которой производится нормировка всех принятых отсчетов. Приемная антенна 1, приемное устройство 2 и блок 3 известные устройства, которые используются в прототипе и реализованы практически во всех гидролокационных станциях. В большинстве гидролокаторах используется одна антенна для излучения и для приема. Особенности данного предложения заключается в том, что приемная антенна 1 должна обеспечивать избирательный прием в том же диапазоне углов, что обеспечивает обзор пространства излучающая антенна. Необходимо обеспечить излучение и прием по одним и тем же направлением в горизонтальной плоскости и по тем же горизонтальным направлением в вертикальной плоскости. Таким образом, в приеме формируется нижний ярус горизонтальных характеристик и верхние яруса горизонтальных характеристик на интервале последовательных временных циклов обработки. Поэтому в спецпроцессоре отдельно обрабатываются все характеристики направленности по горизонтали в блоке 5 и по вертикали в блоке 6, а затем в блоке 7 производят идентификацию по всем каналам таким образом, чтобы каждый горизонтальный канал во всех вертикальных каналах имел одно и то же направление. Такая процедура обеспечивает представление на индикатор последовательных временных интервалов по одинаковым пространственным горизонтальным каналам. Полученная и обработанная таким образом последовательность временных отсчетов по пространству и по амплитуде запоминается и нормируется относительно сигнала с максимальной амплитудой, после чего подается на индикатор для отображения. В нижней части индикатора отображается амплитудная информация всех горизонтальных каналов нижнего яруса, который отображает дно, затем следующий вертикальный ярус отображает амплитудную информацию по всем горизонтальным каналам выше дна и так далее до верхнего яруса, который отображает пространственную информацию поверхности по первому временному циклу обработки. По второму временному циклу обработки производится аналогичная обработка по вертикальным и горизонтальным каналам. Теперь необходимо информацию второго цикла обработки отобразить на индикаторе так, чтобы она не сложилась с информацией первого цикла обработки. Для этого второй цикл временной обработки выводится на свободную часть экрана индикатора, площадь отображения которого уменьшается. Для этого необходимо уменьшить размер отображения площади, на которую выводится амплитудная информация. Уменьшение размера площади приводит к тому, что информация по второму и последующим циклам временной обработки смещается внутрь отображаемой площади и амплитудная информация по пространственным каналам по горизонтальным каналам оказывается смещенной друг относительно друга и по горизонтали и по вертикали.
Таким образом, использование информации, принимаемой по вертикальным и горизонтальным каналам, позволит отобразить реальную амплитудную информацию по горизонтали, по вертикали и во времени по одному циклу излучения - прием, что повысит достоверность предъявляемой оператору информации о целях находящихся на дне, на поверхности и в водном пространстве.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ АЙСБЕРГА ГИДРОЛОКАЦИОННЫМ МЕТОДОМ | 2016 |
|
RU2619311C1 |
| Способ отображения гидролокационной информации | 2019 |
|
RU2726312C1 |
| СПОСОБ ОБРАБОТКИ ГИДРОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2013 |
|
RU2529441C1 |
| ГИДРОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В КОНТРОЛИРУЕМОЙ АКВАТОРИИ | 2015 |
|
RU2593824C1 |
| Способ определения вертикального угла положения подводного объекта | 2023 |
|
RU2810693C1 |
| Способ определения глубины погружения объекта | 2017 |
|
RU2660292C1 |
| Способ обработки и классификации гидролокационной информации | 2019 |
|
RU2725517C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСАДКИ АЙСБЕРГА | 2014 |
|
RU2548596C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ СИГНАЛА ОТ ЦЕЛИ | 2011 |
|
RU2473924C1 |
| ГИДРОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ, ДВИЖУЩИХСЯ С МАЛОЙ РАДИАЛЬНОЙ СКОРОСТЬЮ В КОНТРОЛИРУЕМОЙ АКВАТОРИИ, И ГИДРОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА, РЕАЛИЗУЮЩАЯ ЭТОТ СПОСОБ | 2002 |
|
RU2242021C2 |
Изобретение относится к области гидроакустики и может быть использовано при проектировании и разработке систем активной гидролокации, для получения более полной информации о пространственном положении обнаруженных объектов в одном цикле «излучение - прием». Способ отображения гидролокационной информации содержит излучение зондирующего сигнала, прием эхо-сигнала статическим веером М характеристик направленности (ХН), дискретизацию входной информации и по каждому из М направлений К раз отображение L элементов дистанции на индикаторе по всем направлениям, излучение зондирующего сигнала производят полуцилиндрической гидроакустической антенной, которая формирует одну широкую ХН по горизонтали и одну ХН по вертикали, прием эхо-сигналов осуществляют цилиндрической антенной, формирующей обзор пространства по горизонтали и по вертикали статическим веером характеристик направленности с образованием веера N характеристик направленности по вертикали шириной Q° и S горизонтальных характеристик шириной Y° по горизонтали в каждом вертикальном ярусе, где нижний вертикальный ярус S горизонтальных характеристик идентично повторяется по всем N вертикальным ярусам, по каждой характеристике направленности принимают последовательные дискретизированные временные отсчеты эхо-сигналов по L элементам дистанции, запоминают, определяют сигнал с максимальной амплитудой, нормируют все отсчеты относительно сигнала с максимальной амплитудой и после окончания обработки последовательно отображают на индикаторе по дистанции, по всем горизонтальным характеристикам направленности каждого вертикального уровня, начиная с нижнего, при этом с каждым последовательным временным циклом обработки К очередного элемента по дистанции L уменьшают размер площади отображения на экране индикатора, для чего отображают информацию каждого элемента дистанции на меньшей площади экрана, чем формируют объемное представление всей информации по дистанции, по горизонтали и по вертикали. 1 з.п. ф-лы, 1 ил.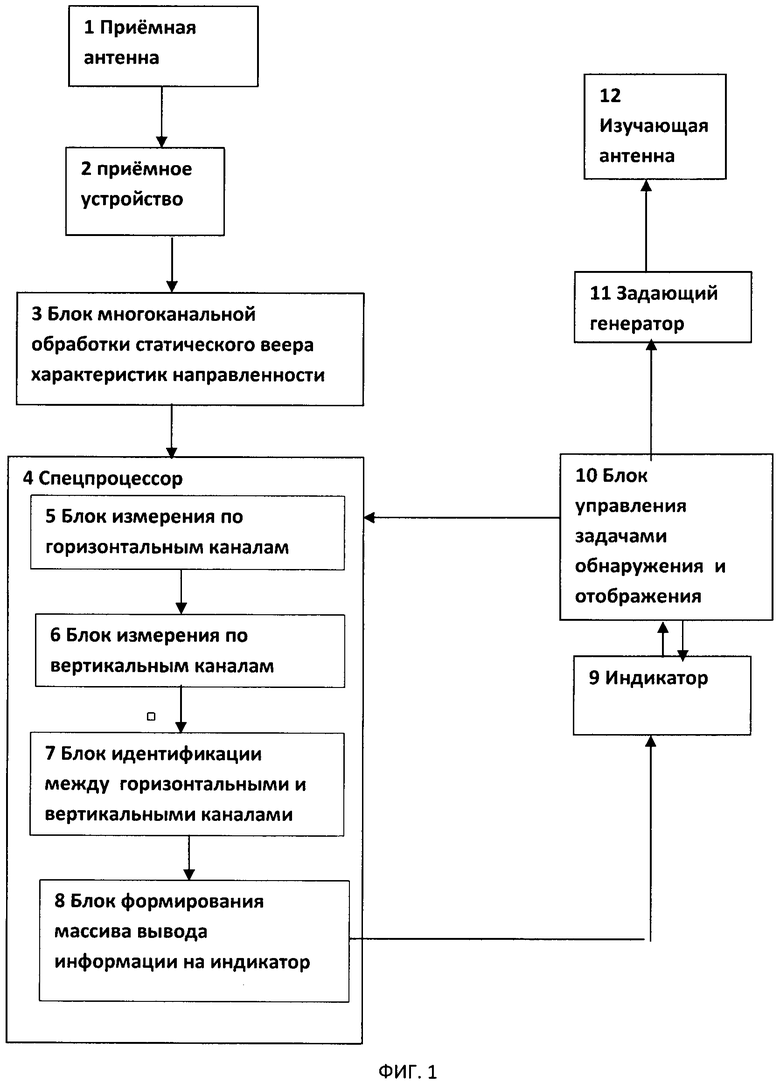
1. Способ отображения гидролокационной информации, содержащий излучение зондирующего сигнала, прием эхо-сигнала статическим веером М характеристик направленности (ХН), дискретизацию входной информации и по каждому из М направлений К раз отображение L элементов дистанции на индикаторе по всем направлениям, отличающийся тем, что излучение зондирующего сигнала производят полуцилиндрической гидроакустической антенной, которая формирует одну широкую ХН по горизонтали и одну ХН по вертикали, прием эхо-сигналов осуществляют цилиндрической антенной, формирующей обзор пространства по горизонтали и по вертикали статическим веером характеристик направленности с образованием веера N характеристик направленности по вертикали шириной Q° и S горизонтальных характеристик шириной Y° по горизонтали в каждом вертикальном ярусе, при этом нижний вертикальный ярус S горизонтальных характеристик идентично повторяется по всем N вертикальным ярусам, по каждой характеристике направленности принимают последовательные дискретизированные временные отсчеты эхо-сигналов по L элементам дистанции, запоминают, определяют сигнал с максимальной амплитудой, нормируют все отсчеты относительно сигнала с максимальной амплитудой и после окончания обработки последовательно отображают на индикаторе по дистанции, по всем горизонтальным характеристикам направленности каждого вертикального уровня, начиная с нижнего, при этом с каждым последовательным временным циклом обработки К очередного элемента по дистанции L уменьшают размер площади отображения на экране индикатора, для чего отображают информацию каждого элемента дистанции на меньшей площади свободной части экрана, чем формируют объемное представление всей информации по дистанции, по горизонтали и по вертикали.
2. Способ по п. 1, отличающийся тем, что обзор по горизонтали производят в диапазоне 160° при S=20 и Y=8, а по вертикали в диапазоне 45° при N=15 и Q=3°.
| Способ измерения скорости движения цели гидролокатором | 2017 |
|
RU2658528C1 |
| ГИДРОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ, ДВИЖУЩИХСЯ С МАЛОЙ РАДИАЛЬНОЙ СКОРОСТЬЮ В КОНТРОЛИРУЕМОЙ АКВАТОРИИ, И ГИДРОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА, РЕАЛИЗУЮЩАЯ ЭТОТ СПОСОБ | 2002 |
|
RU2242021C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛОКАЛЬНОГО ОБЪЕКТА НА ФОНЕ РАСПРЕДЕЛЕННОЙ ПОМЕХИ | 2016 |
|
RU2634787C1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ПОДАЧИ РАССАДЫ К ПОСАДОЧНЫМ МАШИНАМ | 1929 |
|
SU20389A1 |
| СИСТЕМА ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2016 |
|
RU2648546C1 |
| НАВИГАЦИОННАЯ ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ ОСВЕЩЕНИЯ БЛИЖНЕЙ ОБСТАНОВКИ | 2001 |
|
RU2225991C2 |

