Настоящее техническое предложение относится к области гидроакустики и может быть использовано для оценки параметров гидроакустической аппаратуры.
Ошибка оценки любой величины, измеряемой телеметрическим методом, может быть получена, если имеется измеренная оценка, известна истинная оценка и проведено достаточное число измерений в полностью контролируемых и неизменных условиях, которые обеспечивают достоверность оценки. Как правило, оценка дистанции до неподвижного отражателя гидролокатором, установленным на подвижном носителе, практически исключает получение достаточной статистики в контролируемых условиях, поскольку все оценки производятся с подвижного носителя, и поэтому все оценки оказываются смещенными.
Вопросы, связанные с определением дистанции до неподвижного объекта гидролокатором, и ошибки, влияющие на определение дистанции, достаточно подробно рассмотрены в технической литературе (А.Н.Яковлев, Г.П.Каблов. Гидролокаторы ближнего действия. Л.,Судостроение, 1983 г., с.73-81). Там же приведен метод определения ошибки оценки дистанции гидролокатором как среднестатистическая величина разброса оценки дистанции относительно среднего значения при фиксированных условиях измерения. Этот способ может быть принят за прототип.
Способ-прототип содержит излучение зондирующего сигнала гидролокатором, установленным на неподвижном носителе, в направление на неподвижный отражатель, определение момента времени излучения T1, определение момента времени приема эхосигнала T2, определение скорости звука С, определение разности между моментом времени излучения и моментом времени приема эхосигнала, определение дистанции по формуле Д=0,5(Т2-T1)C, измерение дистанции К раз, определение среднего значения полученной дистанции, определение среднеквадратического отклонения полученной оценки дистанции относительно среднего значения, что и будет являться ошибкой определения дистанции, определенной гидролокатором.
Недостатком этого способа является невозможность получения несмещенной оценки дистанции для гидролокатора, установленного на подвижном носителе, поскольку смещение оценки образуется при движении носителя гидролокатора. Кроме того, задача усложняется, если носитель является подводным и отсутствуют спутниковые средства определения местоположения подводного отражателя и точная оценка дистанции до него.
Техническим результатом от использования предлагаемого изобретения является обеспечение возможности определения ошибки оценки дистанции до неподвижного отражателя при движении носителя гидролокатора в подводном положении.
Заявленный технический результат достигается тем, что в известный способ, содержащий излучение зондирующего сигнала в водную среду гидролокатором, установленным на подвижном носителе, прием эхосигнала, определение момента времени излучения, определение момента времени приема эхосигнала, определение разности между моментом времени излучения и моментом времени приема эхосигнала Т, определение скорости звука в водной среде, вычисление дистанции Д1 и Д2 до неподвижного отражателя при двух следующих друг за другом посылках, вводят дополнительные признаки, а именно: определяют собственную скорость Vсоб движения носителя гидролокатора с использованием гидроакустического измерителя скорости движения, определяют угол между направлением на отражатель и направлением движения носителя гидролокатора q0, определяют оценку радиальной скорости отражателя по двум следующим друг за другом операциям: излучение - прием Vрад=|(Д2-Д1)/ Т|, а ошибку оценки дистанции бД между гидролокатором, установленным на подвижном носителе, и неподвижным отражателем, определяют по формуле: бД=0,5 ((Vpaд/cosq0)-Vсоб) Т.
Сущность предлагаемого метода заключается в следующем.
Известно, что радиальная скорость носителя гидролокатора определяется как величина изменения расстояния от носителя гидролокатора до отражателя за известное время или Vрад=(Д2-Д1)/Т, где Т - время между посылками локации, Д1 - дистанция до отражателя на момент первого излучения, Д2 - дистанция до отражателя на момент второго излучения. В технической эксплуатационной документации ее часто определяют как ВИР - величина изменения расстояния. Если отражатель неподвижен, то изменение дистанции за время между посылками будет происходить за счет собственного движения носителя гидролокатора. Таким образом оценка Vрад будет совпадать с оценкой собственной скорости, которую можно принять за эталон, поскольку ошибка измерения собственной скорости современными абсолютными измерителями составляет 0,03 узла (Ю.А.Корякин, С.А.Смирнов, Г.В.Яковлев. Корабельная гидроакустическая техника. СПб, Наука, 2004 г., с.334). Понятно, что ошибка измерения радиальной скорости определяется в простейшем случае ошибкой измерения дистанции и ошибкой измерения времени между излучениями, и эти ошибки измерения статистически независимы.
Если величины измерены с некоторыми ошибками и измеренные значения используются для расчета разности, то ошибка определения разности равна сумме погрешностей. (Дж.Тейлор. Введение в теорию ошибок. М., Мир, 1985 г., с. 34). Если величина определяется с известной погрешностью и вычисляется произведение с величиной, не имеющей погрешности (оценка времени между посылками), то погрешность исходной величины умножается на величину, не имеющую погрешности. Оценка времени между посылками определяется с высокой точностью с использованием корабельной системы единого времени, которая обеспечивает работу всей аппаратуры, установленной на подводном носителе. Поэтому время излучения сигналов можно считать постоянной величиной и соответственно интервал времени между излучениями также можно считать постоянной величиной.
Тогда VрадТ=(Д2-Д1) и, соответственно, бVрад Т=2 бд.
При дистанции до отражателя порядка несколько тысяч метров за время между посылками порядка 1 минуты оценка дистанции существенно не изменится, условия распространения сигнала также существенно не изменяться. Исходя из этого, можно считать, что ошибки определения дистанции при двух последовательных излучениях будут отличаться незначительно и их можно считать равными.
Ошибка определения радиальной скорости гидролокатором, установленным на подвижном носителе, нам не известна. Однако она может быть найдена, если имеется оценка радиальной скорости, определенная по двум последовательным излучениям, и некоторый эталон, в качестве которого можно принять оценку собственной скорости движения подводного носителя гидролокатора. Ошибку измерения радиальной скорости, бVрад, можно определить, если использовать прецизионный измеритель собственной скорости, Vсоб, как бVрад=Vрад-Vсоб. Оценка радиальной скорости имеет отрицательный знак, поскольку при неподвижном отражателе и движущемся с постоянной скоростью носителе гидролокатора оценка дальности при втором излучении будет меньше, чем оценка дальности при первом излучении, поэтому необходимо брать модуль оценки радиальной скорости.
Ошибка измерения собственной скорости порядка 0,03 узла или 0,015 м/сек обеспечивается современными измерительными приборами (ЛАГами), установленными на плавающих носителях гидроакустических средств, которые проходят метрологическую аттестацию. Там же в ЛАГах измеряется и используется скорость звука. (Ю.А.Корякин, С.А.Смирнов, Г.В.Яковлев. Корабельная гидроакустическая техника. СПб., Наука, 2004 г., с. 334). Измерение собственной скорости производится постоянно и на любой глубине, время измерения собственной скорости существенно меньше, чем время между определением радиальной скорости. Поэтому на момент измерения радиальной скорости гидролокатором по неподвижному отражателю всегда имеется оценка собственной скорости носителя гидролокатора с высокой точностью. При ситуации, когда подводный носитель гидролокатора будет двигаться строго на неподвижный отражатель, обеспечивается минимальная ошибка оценки скорости.
Однако в реальных условиях точно выбрать направление движения на отражатель затруднительно, и тогда возникает систематическая ошибка, которая определяется углом между истинным положением отражателя и направлением движения носителя гидролокатора. Зная направление движение носителя гидролокатора, которое определяется курсом К0 и, зная пеленг на отражатель П0, который определяется по направлению прихода эхосигнала, можно определить угол между направлением движения и положением отражателя или курсовой угол на неподвижный отражатель q0=|К0-П0|, и скорректировать полученную оценку радиальной скорости. (Терминологический словарь-справочник по гидроакустике. Л., Судостроение, 1989 г., с.120). Для этого надо оценку радиальной скорости разделить на косинус измеренного угла q0. Как правило, курсовой угол на отражатель в современных гидроакустических станциях определяется автоматически в процессе обнаружения и измерения дистанции по статическому вееру характеристик направленности, либо при автоматическом сопровождении объекта. Поэтому одиночная косвенная оценка ошибки определения дистанции гидролокатора при работе по неподвижному отражателю будет определяться формулой:

Оценка точности определения курсового угла на отражатель зависит от метода определения пеленга на принятый эхосигнал и в большинстве случаях составляет доли градусов (А.П.Евтютов, В.В.Митько. Примеры инженерных расчетов в гидроакустике. Л., Судостроение, 1981 г., с.236), что практически не скажется на результате определения ошибки скорости. В практической гидроакустике принято, что если ошибка измерения определяется суммой нескольких слагаемых, то на суммарную случайную ошибку основное влияние будет оказывать наибольшая ошибка одной из составляющих. Если одна из ошибок вдвое меньше вместе взятых остальных, то ее вклад в суммарную погрешность составит лишь 10%. (А.Н.Яковлев, Г.П.Каблов. Гидролокаторы ближнего действия. Л.,Судостроение, 1983 г., с.75). Поэтому ошибками измерения курсового угла, собственной скорости и времени можно пренебречь.
В общем случае можно рассматривать статистические оценки, когда бД усредняется по результатам нескольких измерений на близких дистанциях, что определяется скважностью излучения зондирующего сигнала.
Сущность изобретения поясняется фиг.1, на которой представлена блок-схема устройства, реализующего предлагаемый способ.
Антенна 1 через коммутатор 2, приемное устройство 4, измеритель 6 радиальной скорости соединена с первым входом вычислителя 8 ошибки оценки дистанции. Второй выход приемного устройства 4 через первый вход измерителя 7 курсового угла на отражатель соединен со вторым входом блока 8 вычислителя ошибки оценки дальности. Первый выход системы 5 управления и индикации через генератор 3 соединен с вторым входом коммутатора 2, второй выход которого соединен с антенной 1. Второй выход системы 5 управления и индикации соединен со вторым входом приемного устройства 4. Третий выход системы 5 соединен с третьим входом блока 8 вычислителя ошибки оценки дальности. Четвертый выход системы 5 соединен двухсторонней связью со вторым входом измерителя 7 курсового угла цели, а выход измерителя 9 собственной скорости соединен с четвертым входом вычислителя ошибки оценки дальности 8.
Антенна 1 является известным устройством, которое используется во всех современных гидролокаторах, и параметры которой могут быть использованы для формирования необходимых характеристик направленности (Справочник по гидроакустике, А.П.Евтютов и др. Л., Судостроение, 1988 г., с.299-353). Коммутатор 2 и генератор 3 достаточно широко используются в современной гидроакустике (А.С.Колчеданцев. Гидроакустические станции. Л., Судостроение, 1982 г., с.66). Там же на с.99-141 рассмотрены принципы формирования приемных устройств и систем управления и индикации. Приемные устройства, как правило, имеют систему автоматического сопровождения цели, которое позволяет определять направление на цель. В том случае когда отсутствует система автоматического сопровождения цели, то имеется либо круговой обзор либо секторный обзор, который позволит определить курсовой угол цели относительно направления собственного движения. Измеритель 9 (ЛАГ) является известным устройством, который выпускается серийно и устанавливается практически на все носители гидролокационных станций. (Ю.А.Корякин, С.А.Смирнов, Г.В.Яковлев. Корабельная гидроакустическая техника. СПб., Наука, 2004 г., с. 334). Измеритель радиальной скорости является известным устройством, которое используется практически во всех гидролокаторах освещения ближней обстановки, в которых используются короткие длительности зондирующих сигналов, не позволяющих определять радиальную скорость по смещению спектра за счет эффекта Доплера. Ошибка измерения радиальной скорости отражателя по величине изменения дистанции до него существенно меньше, чем по величине смещения спектра, а реализация не требует сложных технических решений, связанных со спектральной обработкой эхосигналов.
Осуществление способа рассмотрим на примере работы устройства. Система управления и индикации 5 задает параметры зондирующего сигнала и передает их в генератор 3, который формирует зондирующие сигналы необходимой длительности и частоты повторения. Этот сигнал через коммутатор 2 передается на антенну 1 и излучается в воду. Одновременно параметры зондирующего сигнала передаются в приемное устройство для обеспечения оптимальной обработки принимаемого сигнала и в блок 8 вычислитель ошибки оценки дистанции для проведения вычисления. Эхосигнал от неподвижного отражателя поступает на вход антенны 1 и через коммутатор 3 на вход приемного устройства, где производится оптимальная обработка принятого сигнала, выбор порога, обнаружение эхосигнала и измерение дистанции до отражателя. Данные с выхода приемного устройства 4 и системы 5 управления и индикации поступают в измеритель 6 радиальной скорости и в измеритель 7 курсового угла на отражатель. В реальной аппаратуре гидролокации эти блоки являются промежуточными в цепи последовательных задач, решаемых гидролокатором. Полученные оценки поступают в вычислитель ошибки оценки дистанции 8, на первый вход которого поступает оценка собственной скорости движения носителя гидролокатора с выхода измерителя 9 (ЛАГа). В вычислителе 8 производится автоматическое вычисление ошибки оценки дистанции. В настоящее время использование современной вычислительной техники позволяет создавать спецпроцессоры, которые решают все задачи обработки гидроакустической информации на основе конкретных алгоритмов обработки с использованием аппаратных решений и жесткой логике вычислений при работе в реальном масштабе времени (там же, с.278).
В качестве примера приведено определения ошибки оценки дистанции до неподвижного отражателя с использованием предлагаемого метода для гидролокатора ближнего действия, находящегося на подвижном носителе.
Пусть частота повторения сигнала Т равна Т=5 сек.
Дистанция до неподвижного отражателя, полученная по первой посылке, равна Д1=2000 метров.
Дистанция до неподвижного отражателя, полученная по второй посылке, равна Д2=1950 метров.
Определяем радиальную скорость Vрад, Vрад=(2000-1950)/5=10 м/сек.
Определяем собственную скорость по ЛАГу Vсоб, Vсоб=10,7 м/сек.
Определяем курсовой угол на отражатель q0, q0=10 градусов.
С учетом курсового угла на отражатель Vpaд/cosq0,
Vрад/cosq0=10/cos100=10,2 м/с.
Ошибка измерения радиальной скорости бVрад=10,7-10,2=0,5 м/сек.
Окончательно получаем ошибку оценки дистанции, рассчитанную по формуле (1), по двум посылкам:
бД=0,5х(10,7-10,2)х5=1,25 м.
Без учета оценки курсового угла на отражатель ошибка оценки дистанции составит бД=0,5х0,7х5=1,75 м.
Таким образом, предлагаемое техническое решение позволяет достаточно просто определить ошибку оценки дальности гидролокатором с подвижного носителя в подводном положении по любому неподвижному локальному отражателю.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ЗВУКА | 2016 |
|
RU2631234C1 |
| Способ определения скорости звука гидролокатором по трассе распространения сигнала до цели | 2017 |
|
RU2650829C1 |
| Способ обработки гидролокационной информации | 2018 |
|
RU2694269C1 |
| Активный гидролокатор | 2017 |
|
RU2654366C1 |
| Способ определения скорости звука | 2021 |
|
RU2776959C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ ПРИВОДНЯЮЩЕГОСЯ ОБЪЕКТА | 2011 |
|
RU2478983C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИСТАНЦИИ ГИДРОЛОКАТОРОМ | 2015 |
|
RU2612201C1 |
| Способ измерения глубины погружения объекта | 2022 |
|
RU2789811C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛОКАЛЬНОГО ОБЪЕКТА НА ФОНЕ РАСПРЕДЕЛЕННОЙ ПОМЕХИ | 2016 |
|
RU2634787C1 |
| ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ ХАРАКТЕРИСТИК ОБЪЕКТА | 2014 |
|
RU2570100C1 |
Использование: в гидроакустике. Сущность: способ предназначен для определения ошибки оценки дистанции гидролокатором, установленным на подводном подвижном носителе относительно неподвижного отражателя. Для этого с помощью гидролокатора производят излучение зондирующих сигналов, определяют время излучения, определяют время приема эхосигнала, измеряют скорость звука, определяют разность между временем излучения и временем приема эхосигнала Т, вычисляют дистанцию, измеряют собственную скорость движения Vсоб, определяют угол q0 между положением неподвижного объекта и направлением движения носителя гидролокатора, определяют радиальную скорость объекта Vрад по двум следующим друг за другом посылкам зондирующего сигнала посылкам, а ошибку определения дистанции бД определяют по формуле:
бД=0,5((Vрад/cosq0)-Vсоб)Т. Технический результат: обеспечение возможности определения ошибки оценки дистанции до неподвижного отражателя при движении носителя гидролокатора в подводном положении. 1 ил.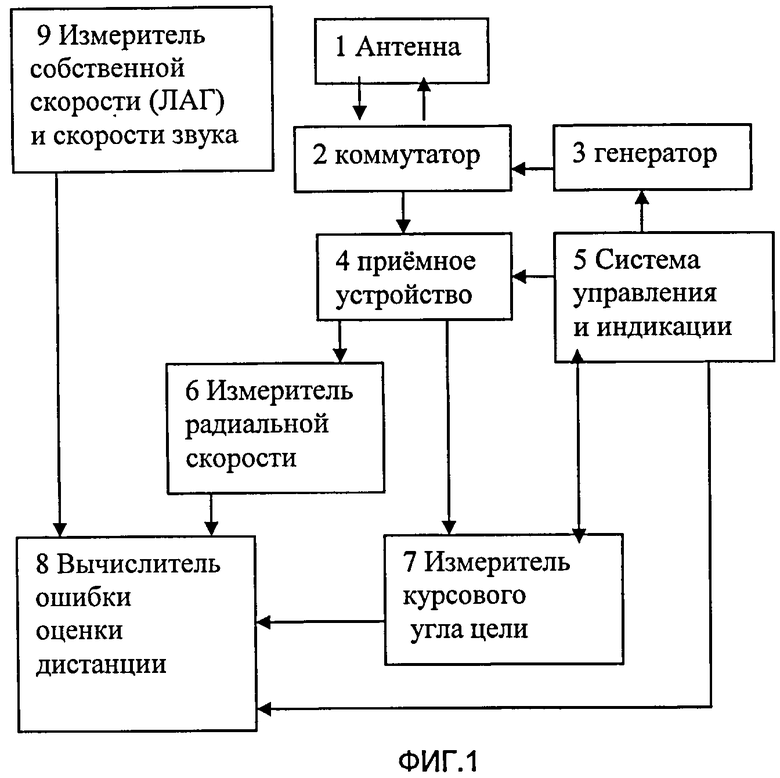
Способ определения ошибки оценки дистанции гидролокатором, установленным на подвижном носителе в подводном положении, до локального неподвижного отражателя, содержащий излучение зондирующего сигнала в водную среду гидролокатором, прием эхосигнала, определение момента времени излучения, определение момента времени приема эхосигнала, определение разности между моментом времени излучения и моментом времени приема эхосигнала Т, определение скорости звука в водной среде, вычисление дистанции Д1 и Д2 до неподвижного отражателя при двух следующих друг за другом посылках зондирующего сигнала, отличающийся тем, что определяют собственную скорость Vсоб движения носителя гидролокатора с использованием гидроакустического измерителя скорости движения, определяют угол между направлением на отражатель и направлением движения носителя гидролокатора q0, определяют оценку радиальной скорости отражателя по двум следующим друг за другом операциям: излучение - прием Vрад=|(Д2-Д1)/Т|, а ошибку определения бД дистанции между подвижным гидролокатором и неподвижным отражателем определяют по формуле: бД=0,5 ((Vрад/соsq0)-Vсоб) Т.
| JP 53041257 A, 14.04.1978 | |||
| US 2011096630 A1, 28.04.2011 | |||
| СПОСОБ ИЗМЕРЕНИЯ ДИСТАНЦИИ ГИДРОЛОКАТОРОМ | 2011 |
|
RU2460093C1 |
| US2009059723 A1, 05.03.2009 | |||
| JPH 03282287 A, 12.12.1991 | |||
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2271551C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ ОБЪЕКТА | 2007 |
|
RU2350983C2 |

