Настоящее изобретение относится к области гидроакустики и может быть использовано для измерения параметров положения объекта, обнаруженного на дне с использованием гидролокатора ближнего действия.
Известны методы обнаружения объекта, находящегося вблизи подвижного носителя в водной среде, с использованием гидролокатора, установленного на этом носителе. Использование этих методов позволяет обнаруживать объект, измерять до него дистанцию и измерять направление на объект. (Яковлев А.Н. Каблов Г.П. «Гидролокаторы ближнего действия». Л. Судостроение 1983 г.).
Для этого излучают зондирующий сигнал, измеряют время задержки между излученным сигналом и принятым эхосигналом от объекта, определяют дистанцию до обнаруженного объекта по величине временной задержки и известной скорости распространения звука и определяют направление прихода отраженного сигнала в горизонтальном направлении. Эти методы позволяют обнаруживать объекты на дне, но они не позволяют измерять высоту этих объектов.
Известен «Способ и устройство определения глубины подводного объекта » по патенту JP 02708109 B2 от 04.02.98 г. G01S 15/10 HITACYI LTD, который основан на том же принципе, что и предыдущий способ, но определение направления производится с использованием сканирования характеристики направленности в вертикальной плоскости при излучении зондирующего сигнала узкой характеристикой направленности. Недостатком данного метода является то, что необходимо точно знать направление на цель, которая определяется с использованием узкой характеристики направленности (XH) в вертикальной плоскости. Результатом оценки глубины для объекта является величина, которая получается при решении прямоугольного треугольника по гипотенузе, определяемой по оценке дистанции и углу, определяемому направлением характеристики направленности. В современной гидроакустике нашли применение методы, основанные на анализе особенностей формы тени. Эффективность этих методов определяется ракурсом объекта и его положением относительно углов облучения. (А.А. Корякин Корабельная гидроакустическая техника. СПб. «Наука». 2004 г., стр. 35-40). Трудности обнаружения параметров обнаруженного на дне объекта неоднократно обсуждались в научной литературе «О путях увеличения вероятности теневого изображения протяженных объектов» Я.В. Моисеенко; Трудах 8 международной конференции «Прикладные технологии гидроакустики и гидрофизики»/ СПб. 2006 г. стр. 161-165. Полученные оценки параметров обнаруженного на дне объекта предоставляют возможность использования их для решения задач классификации, что необходимо для рассмотрения подводных потенциально опасных объектов. А.Н. Яковлев, Г.П., Каблов «Гидролокаторы ближнего действия». Судостроение, 1983 г., Л., стр. 122-128.). Классификация подводных объектов, обнаруженных поисковым гидролокатором. Р.А. Савостин, В.А. Сергеев, стр. 426-429. Труды 10 Всероссийской конференции Прикладные технологии гидроакустики и гидрофизики. СПб. Наука, 2010 г. В работе рассматривается комплексная обработка информации с использованием ковариационной матрицы ошибок для задач идентификации обнаруженных объектов.
Однако ни в одном из источников не рассматриваются вопросы измерения параметров положения обнаруженного объекта относительно уровня дна.
Тем не менее, объекты, обнаруженные гидролокатором на дне, могут иметь различную конфигурацию и различное техническое назначение. Среди них имеются малоразмерные объекты типа буй, якорная мина, классификация которых не представляет значительной трудности. Есть объекты крупногабаритные, которые затонули давно и положение которых не определено. Поэтому при обнаружении таких объектов, прежде всего, возникает вопрос их расположения относительно дна. Так, затонувшие суда могут находиться прямо вертикально на днище, могут находиться на борту, могут находиться в перевернутом состоянии кверху килем. Складки дна могут иметь различную высоту и наклон, что необходимо контролировать при работе гидролокатора прямо по ходу носителя с упреждением. При этом на дистанции обнаружения возникают трудности в определении положения, в котором находится объект, как к нему подойти и с какой стороны целесообразно провести доскональное обследование. Поэтому информация о положении, которое занимает объект относительно дна, является чрезвычайно важной.
Наиболее близким аналогом, который содержит по существу близкие операции по вопросам измерения параметров положения обнаруженного объекта относительно уровня дна, является способ измерения глубины погружения объекта по патенту РФ №2350983. Способ содержит излучение зондирующего сигнала, прием эхосигнала и измерение дистанции D1 на момент времени t1. В момент времени t1+Δt, повторяют процедуру измерения дистанции до объекта, определяют дистанцию D2 до объекта в момент времени t1+Δt, определяют скорость движения носителя Vсоб; а глубину погружения объекта относительно горизонта движения носителя определяют по формуле 

Этот способ определяет глубину положения объекта на дне, но недостатком этого способа является невозможность определения пространственных характеристик объекта на дне.
Задачей изобретения является определение пространственных характеристик объекта на дне.
Техническим результатом предложенного способа является определение протяженности объекта на дне и угла его наклона по отношению к дну по одной посылке.
Указанный технический результат достигается тем, что в известный способ, содержащий излучение зондирующего сигнала в момент времени t, определение дистанции до объекта D по величине временной задержки и известной скорости распространения звука C, для чего после излучения измеряется уровень объемной реверберации U0 и определяется порог обнаружения Uпор эхосигнала, введены новые признаки, а именно: по превышению эхосигналом от дна порога обнаружения определяют время распространения сигнала до дна tдна и дистанцию от гидролокатора до дна Ндна=0,5C tдна, измеряют tнач время начала прихода эхосигнала, при котором произошло первое превышение порога, определяют дистанцию до объекта на дне D1=0,5C tнач, измеряют момент окончания эхосигнала tпос., когда произошло последнее превышение порога, определяют дистанцию до конца объекта на дне Dпос=0,5C tпос, определяют момент времени начала тени tтениН при Uпор≥AтениН, где АтениН - амплитуда эхосигнала начала тени, определяют момент времени окончания тени tтениК, при котором амплитуда эхосигнала АтениК.>Uпор и tтениК>tтениН>tпос, определяют дистанцию до момента окончания тени Dтени=0,5C tтениК., определяют горизонтальную проекцию дистанции до начала объекта на дне 


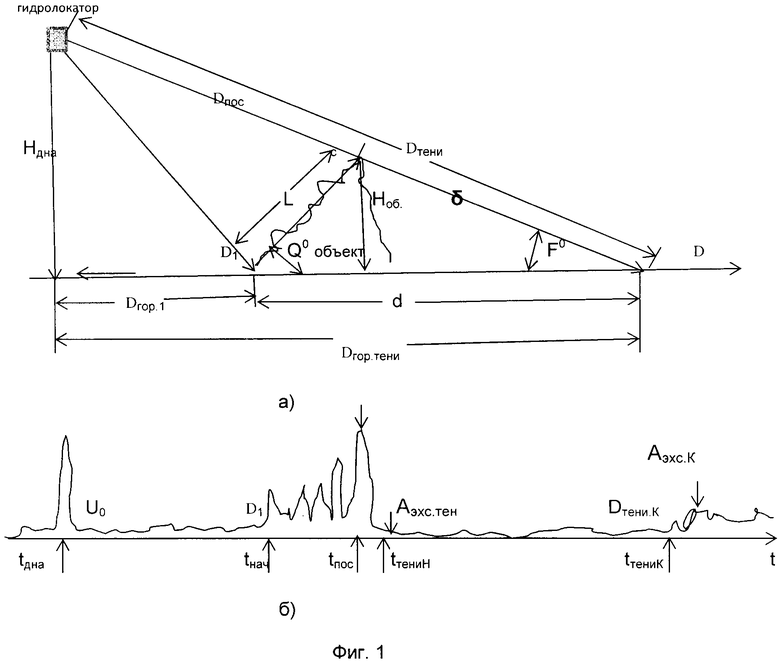
Сущность изобретения поясняется фиг 1 (а, б), где на фиг 1а приведена лучевая картина облучения объекта на дне, а на фиг 1б - временная реализация одного цикла излучения, а фиг 2, - структурная схема, реализующая заявленный способ.
Эхосигнал от локального объект формируется на основе отражения энергии падающего зондирующего сигнала на объект по нормали относительно направления прихода зондирующего сигнала гидролокатора. Это приводит к тому, что при отражении формируется регулярный фронт волны, характеристика которой стабильна на некотором пространственном интервале и характеризует положение объекта относительно направления падающей волны. (Е.А. Штагер, Е.В. Чаевский. Рассеяние волн на телах сложной формы. М.: Сов. Радио? 1974 г/).
Поскольку локальный отражатель находится в дальнем поле и имеет ограниченные размеры, то эхосигнал от такого отражателя представляет плоскую мало искаженную волну. Форма огибающей эхосигнала будет определяться тем, насколько отдельные отражающие элементы объекта будут освещены или насколько они будут затенены. Сам объект, находящийся на дне, целиком экранирует донную поверхность, и сигнал к ней не приходит и от нее не отражается. В этом случае интенсивность эхосигнала резко уменьшается, даже по сравнению с сигналом донной реверберации, и на вход приемного устройства поступает сигнал, амплитуда которого определяется интенсивностью объемной реверберации и шума, поскольку донный участок заэкранирован корпусом лежащего на дне объекта. Следовательно, на участке огибающей реализации входного процесса образуется своеобразный энергетический провал, уровень которого существенно меньше, чем эхосигнал от объекта и от уровня донной реверберации, и равен уровню объемной реверберации, действующей на момент прихода эхосигнала после отражения от объекта. Фактически этот уровень объемной реверберации будет соответствовать уровню шума на входе приемного устройства. (А.Н. Яковлев, Г.П. Каблов «Гидролокаторы ближнего действия» Судостроение 1983 г. Л. Стр. 50).
Существующие системы обнаружения имеют своей целью определение наличия эхосигнала от объекта по величине превышения амплитуды эхосигнала от объекта выбранного порога, который выбирается исходя из отношения сигнал/помеха. Таким образом, критерием является превышение измеренного уровня эхосигнала измеренного уровня помехи. Эхосигнал от объекта может содержать несколько отражателей, амплитуды от которых определяются структурой отражателя и их эквивалентным радиусом. Амплитуда эхосигнала от отражателя, имеющего максимальную высоту, формирует протяженность тени от объекта на дне. Поэтому, наряду с сигналом от высокой точки отражения, наблюдается сигнал от самого начала отражения, затем может наблюдаться эхосигнал от отражателя, имеющего максимальную амплитуду, затем эхосигнал от последнего отражателя, принадлежащего объекту, которые все вместе и определяют длину тени. Поэтому в задаче обнаружения тени рассматривают время начала эхосигнала, время формирования зоны тени и определение момента времени окончания зоны тени. С одной стороны, для обнаружения тени возникает процедура сравнения амплитуды принятой реализации с порогом Uпор., который характеризует отсутствие отражения от объекта. С другой стороны, должен быть минимальный уровень шумов U0, значение которого существует всегда на входе приемного тракта после излучения. Этот уровень может быть измерен после излучения зондирующего сигнала и после окончания приема эхосигналов. Таким образом, наличие эхосигнала от объекта сменяется полным отсутствием какого-либо сигнала и наличием уровня шумов объемной реверберации, которая измерена после излучения зондирующего сигнала (фиг 1б). Начало приема эхосигнала от обнаруженного объекта характеризует определенное пространственное расположение объекта и гидролокатора. Глубина до дна Hдна (фиг 1а) определяется этим же гидролокатором по эхосигналу, принятому боковым полем приемной антенны. Дно облучают по нормали и эхосигнал от дна принимают по нормали. Эхосигнал от дна имеет амплитуду большую, чем эхосигналы от объекта. Если известна глубина от гидролокатора до дна, то можно определить угол прихода эхосигнала от начала отражения от объекта. Для этого должна быть измерена дистанция до первого эхосигнала D1=0,5С tнач, который превысил порог. По энергетике это может быть не самый большой по амплитуде эхосигнал, но это первая отражающая точка. Второй треугольник образуется самой последней точкой, отраженной от объекта, после которой начинается зона тени, конец зоны тени и начало эхосигнала донной реверберации. Теперь можно определить горизонтальную дистанцию до начала объекта на дне 


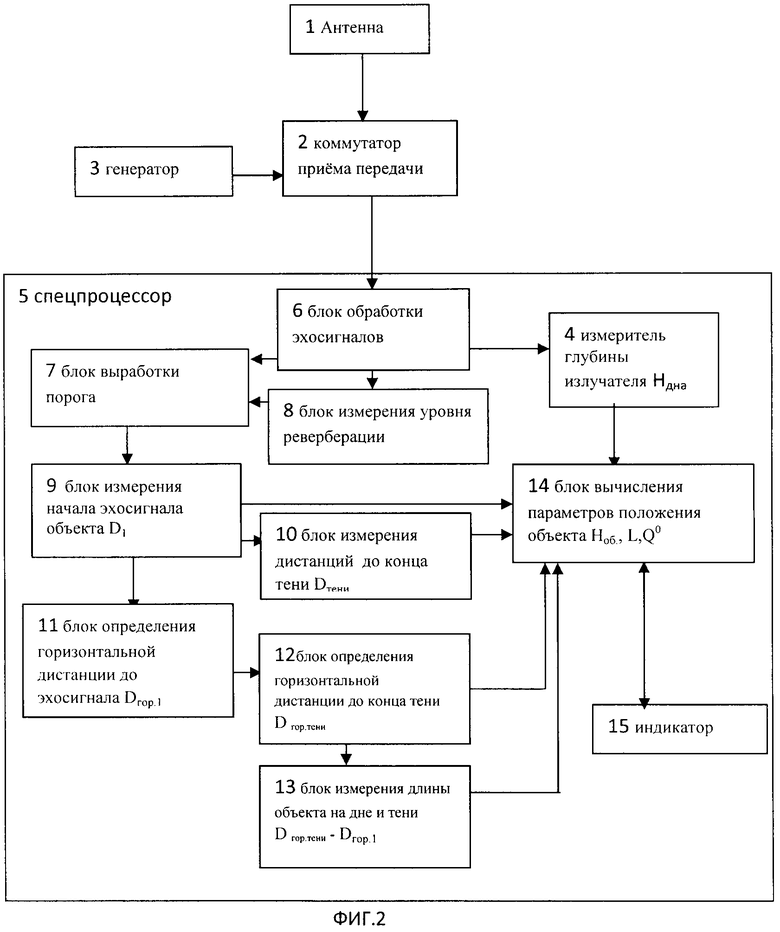
Предложенный способ реализуется с помощью устройства (фиг. 1). Устройство содержит антенну 1, которая через коммутатор приема передачи 2 соединена с спецпроцессором 5, в который входят блок 6, соединенный через первый выход с блоком 7 выработки порога, блоком 9 измерения начала эхосигнала от объекта, блоком 11 определения горизонтальной дистанции до начала эхосигнала, блоком 12 определения горизонтальной дистанции до конца зоны тени с первым входом блока 14 вычисления параметров положения объекта. Второй выход приемника через блок 8 измерения уровня реверберации соединен со вторым входом блока 7 выработки порога, а третий выход приемника 6 через измеритель 4 глубины излучателя, через второй вход блока 14 вычисления параметров положения объекта соединен двусторонней связью с индикатором 15.
Второй выход блока 9 соединен с третьим входом блока 14, а третий выход через блок 10 измерения дистанции до конца зоны тени соединен с четвертым входом блока 14, а второй выход блока 12 через блок 13 измерения длины объекта на дне и тени соединен с пятым входом блока 14.
С использованием предлагаемого устройства способ измерения параметров объекта на дне осуществляется следующим образом.
Генератор 3 формирует зондирующий сигнал, который через коммутатор приема передачи поступает на антенну и излучается в водную среду. Антенна 1 принимает отраженный от объекта эхосигнал, который через коммутатор приема передачи 2 поступает на спецпроцессор 5, в состав которого входит блок обработки эхосигналов 6. Антенна 1, генератор 3, коммутатор приема передачи 2 и блок 6 обработки эхосигналов являются известными устройствами, которые используются в прототипе и достаточно подробно изложены в литературе. (Яковлев А.Н. Каблов Г.П. Гидролокаторы ближнего действия. Л.: Судостроение, 1983 г.). Спецпроцессор 5 является известным устройством, который широко используется в современной электронной технике при обработке эхосигналов. Для качественного решения задач обработки гидроакустической информации в современных корабельных гидроакустических средствах (станциях) используются спецпроцессоры на основе ЦВС, обладающие высокой производительностью, функциональной надежностью и малыми габаритами. С использованием специального алгоритмического и программного обеспечения спецпроцессорами могут решаться все задачи формирования и обработки принимаемых гидроакустических сигналов, в том числе для измерения параметров объекта над дном. (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев. «Корабельная гидроакустическая техника», СПб.: изд. «Наука», 2004 г. Стр. 281). Принятая гидроакустической антенной 1 временная реализация поступает на блок 6 обработки эхосигналов, где происходит оптимальная обработка принятых сигналов, которая передается на блок 7 измерения порога. Параллельно входная информация поступает в блок 8 измерения уровня объемной реверберации U0, значение которой также используется для выбора порога Uпор обнаружения в блоке 7. Эхосигналы, превысившие порог, передаются в блок 9 для измерения дистанции до начала объекта D1=0,5C tнач, где tнач - время приема от первого отражателя. Далее временная реализация поступает в блок 10, где измеряется дистанция до окончания зоны тени Dтени=0,5C tтени, где tтени - время, соответствующее амплитудному соотношению Uпор≥Aэхс.тен, где Aэхс. - измеряемая амплитуда эхосигнала.
Одновременно из блока 6 временная реализация поступает в блок 4 измеритель глубины излучателя, где по своим критериям производится измерение глубины места по излучателям Hдна, которая передается по цифровой линии связи в блок 11, где производится вычисление Dгор.1, и в блок 12, где производится определение Dгор.тени, и далее в блок 13 для определения длины зоны, занимаемой объектом и тенью на дне. Для измерения глубины до дна используются многолучевой эхолот, который представляет собой отдельный специальный гидролокатор, рассмотренный в книге А.В. Богородский, Д.Б. Островский. «Гидроакустические навигационные и поисково-обследовательские средства». СПб.: 2009 г., с. 122. По этим же алгоритмам могут быть реализованы измерения глубины дна при совмещении обработки эхосигналов от объекта и эхосигналов от дна. Все полученные оценки поступают в блок 14 для вычисления высоты объекта Hоб, длины наклонной стороны L и угла наклона Q°.
Практически все указанные процедуры могут быть реализованы на современных компьютерах и ноутбуках, в которых реализованы вычислительные программы Матлаб, Матсард и др. (А.Б. Сергиенко/ Цифровая обработка сигналов/ СПб.: «БХВ-Петербург». 2011 г.).
Таким образом, предложенный способ позволяет по одной посылке определить положение объекта локации над дном и определять параметры этого положения. Это позволяет считать заявленный технический результат достигнутым.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ ХАРАКТЕРИСТИК ОБЪЕКТА | 2014 |
|
RU2570100C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ АЙСБЕРГА ГИДРОЛОКАЦИОННЫМ МЕТОДОМ | 2016 |
|
RU2619311C1 |
| СПОСОБ ОБРАБОТКИ ЭХОСИГНАЛА ГИДРОЛОКАТОРА | 2013 |
|
RU2528556C1 |
| Способ определения глубины погружения объекта | 2017 |
|
RU2660292C1 |
| Способ измерения глубины погружения объекта | 2022 |
|
RU2789811C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСАДКИ АЙСБЕРГА | 2014 |
|
RU2548596C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЛУБИНЫ ОБЪЕКТА И ГИДРОЛОКАТОРОМ | 2013 |
|
RU2527136C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДИСТАНЦИИ ГИДРОЛОКАТОРОМ | 2014 |
|
RU2571432C1 |
| Способ определения параметров цели гидролокатором | 2017 |
|
RU2650835C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛОКАЛЬНОГО ОБЪЕКТА НА ФОНЕ РАСПРЕДЕЛЕННОЙ ПОМЕХИ | 2016 |
|
RU2634787C1 |
Использование: изобретение относится к области гидроакустики и может быть использовано для измерения параметров положения объекта, обнаруженного на дне с использованием гидролокатора ближнего действия. Способ содержит излучение зондирующего сигнала в момент времени t, после излучения измеряется уровень объемной реверберации U0, определяется порог обнаружения Uпор эхосигнала, определяется дистанция до объекта D по величине временной задержки и известной скорости распространения звука С, по превышению эхосигналом от дна порога обнаружения определяют время распространения сигнала до дна tдна и дистанцию от гидролокатора до дна Ндна=0,5С tдна, измеряют tнач время начала прихода эхосигнала, при котором произошло первое превышение порога, определяют дистанцию D1=0,5С tнач, измеряют момент окончания эхосигнала tпос, когда произошло последнее превышение порога, определяют дистанцию Dпос=0,5С tпос, определяют момент времени начала тени tтениН при Uпор≥Aэхс.тен больше амплитуды эхосигнала Aэхс.тен, определяют момент времени окончания тени tтениК, при котором амплитуда эхосигнала Aэхс.К>Uпор, и определяют дистанцию до момента окончания тени Dтени=0,5C tтениК., определяют горизонтальную дистанцию до начала объекта на дне 
Способ определения пространственных характеристик объекта на дне, содержащий излучение зондирующего сигнала в момент времени t, определение дистанции до объекта D по величине временной задержки и известной скорости распространения звука C, для чего после излучения измеряется уровень объемной реверберации U0 и определяется порог обнаружения Uпор эхосигнала, по превышению эхосигналом от дна порога обнаружения определяют время распространения сигнала до дна tдна и дистанцию от гидролокатора до дна Hдна=0,5C tдна, измеряют tнач время начала прихода эхосигнала, при котором произошло первое превышение порога, определяют дистанцию до объекта на дне D1=0,5C tнач, измеряют момент окончания эхосигнала tпос, когда произошло последнее превышение порога, определяют дистанцию до конца объекта на дне Dпос=0,5C tпос, определяют момент времени начала тени tтениН при Uпор≥AтениН, где AтениН - амплитуда эхосигнала начала тени, определяют момент времени окончания тени tтениК, при котором амплитуда эхосигнала AтениК.>Uпор и tтениК>tтениН>tпос, определяют дистанцию до момента окончания тени Dтени=0,5C tтениК, определяют горизонтальную проекцию дистанции до начала объекта на дне  , определяют горизонтальную проекцию дистанции до конца тени
, определяют горизонтальную проекцию дистанции до конца тени  , определяют высоту последней отражающей точки объекта Hоб=δHдна/Dтени, определяют длину L стороны объекта на дне, обращенной к гидролокатору, по формуле
, определяют высоту последней отражающей точки объекта Hоб=δHдна/Dтени, определяют длину L стороны объекта на дне, обращенной к гидролокатору, по формуле
 , где d=Dгор.тени-Dгор.1, δ=Dтени-Dпос, а угол наклона Q° объекта относительно дна определяют как Q°=arcsinδHдна/DтениL.
, где d=Dгор.тени-Dгор.1, δ=Dтени-Dпос, а угол наклона Q° объекта относительно дна определяют как Q°=arcsinδHдна/DтениL.
| СПОСОБ ПОИСКА И ПОДЪЕМА НА ПОВЕРХНОСТЬ МОРЯ ОБЪЕКТА, УСТАНОВЛЕННОГО РАНЕЕ НА МОРСКОМ ДНЕ | 2008 |
|
RU2384857C1 |
| СПОСОБ ПОИСКА И ПОДЪЕМА НА ПОВЕРХНОСТЬ МОРЯ ЗАТОНУВШЕГО МОРСКОГО ОБЪЕКТА | 2001 |
|
RU2221256C2 |
| Способ обнаружения объектов вблизи дна и на дне | 1991 |
|
SU1809405A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ, НАХОДЯЩИХСЯ В ТОЛЩЕ ДОННОГО ГРУНТА | 2009 |
|
RU2410721C1 |
| US2006023570 A1, 02.02.2006 | |||
| US3458854 A, 29.07.1969. | |||

