Изобретение относится к лазерной технике, а именно к лазерной дальнометрии, более конкретно - к приему светолокационных сигналов.
Известен способ некогерентного накопления импульсов при их многократном повторении, например, для обнаружения принимаемых сигналов при лазерном или радиолокационном зондировании удаленных объектов [1-5]. Указанный способ заключается в том, что производят серию циклов зондирования, в каждом цикле зондирования принятый сигнал сравнивают с аналоговым порогом (осуществляют бинарное квантование), подсчитывают количество превышений аналогового порога и принимают решение о наличии сигнала, если это количество превышает заданное число.
Этот способ не позволяет реализовать потенциальную вероятность обнаружения сигналов вследствие потери информации при бинарном квантовании принимаемого сигнала.
Наиболее близким по технической сущности к предлагаемому способу является способ некогерентного накопления сигналов, включающий серию циклов зондирования, в каждом цикле зондирования прием отраженного сигнала и сравнение принятого сигнала с несколькими аналоговыми пороговыми уровнями, накопление суммы превышений аналоговых пороговых уровней, по которой после завершения серии судят о наличии сигнала путем сравнения суммы превышений с пороговым числом [6].
Фиксированный объем накопления, присущий этому способу, ограничивает его преимущества из-за избыточного времени измерения в условиях, когда в этом нет необходимости, и неоправданного расходования ресурса излучателя и источника питания.
Задачей изобретения является оптимальный выбор режима накопления в зависимости от характера локационной обстановки.
Указанная задача решается за счет того, что в известном способе накопления светолокационных сигналов, включающем N циклов зондирования цели, в каждом из которых производят сравнение отраженного целью сигнала с пороговым уровнем и накопления количества М превышений порога, по которому судят о наличии сигнала, предварительно производят серию N'(p,t,m) зондирований, подтверждающих заданную вероятность достоверного измерения для сигналов, превышающих пороговую величину, где р - допустимая вероятность пропуска сигнала, t - коэффициент, определяемый из выражения Ф(t)=γ/2, γ - доверительная вероятность, Ф(t) - функция Лапласа, m - заданное допустимое число пропусков сигнала в предварительной серии, определяют в этой серии количество превышений порога М' и, при выполнении условия N'-М'≤m, накопление прекращают и принимают решение о наличии сигнала, причем, объем предварительной серии определяют по формуле  где m=1, 2, 3…
где m=1, 2, 3…
При проведении предварительной серии можно поочередно присваивать параметру m значения 1, 2 и т.д., если в предыдущей серии не выполняется условие N'-М'≤m.
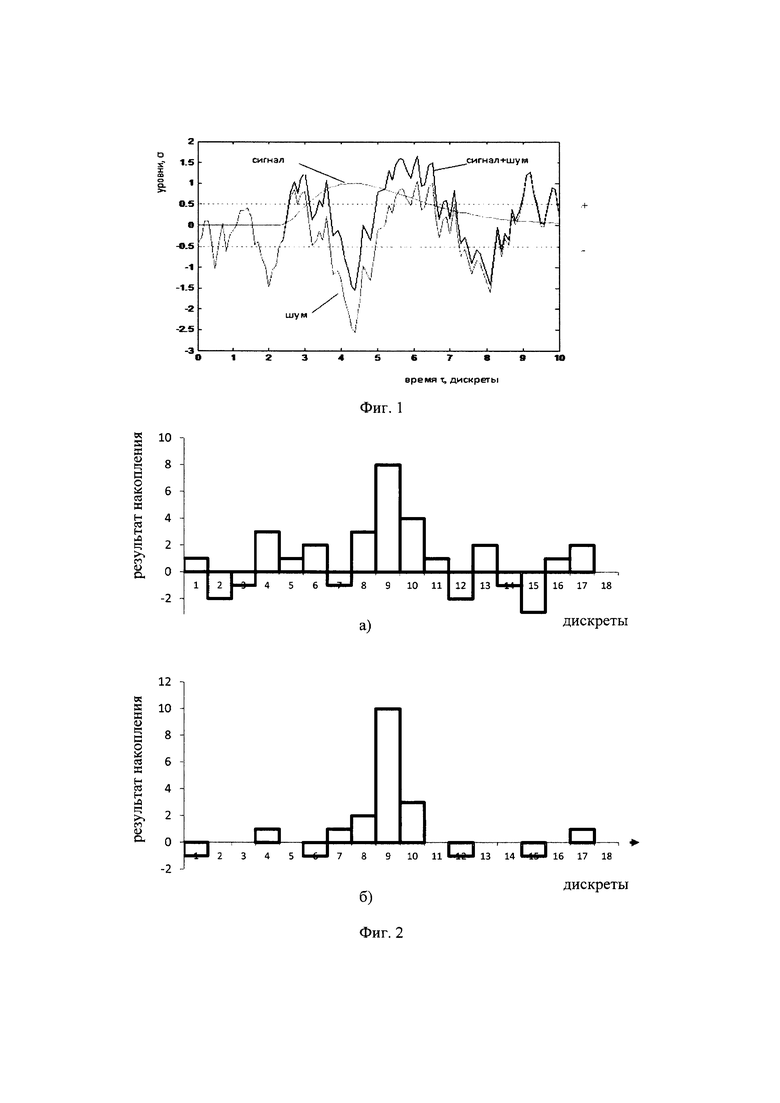
На фиг. 1 представлен пример смеси сигнала с шумом и два аналоговых порога, установленных симметрично относительно нулевого уровня.
На фиг. 2 показаны примеры обнаружения слабого сигнала N=100, М=7 (фиг. 2а) и сильного сигнала N'=10, М=10 (фиг. 2б).
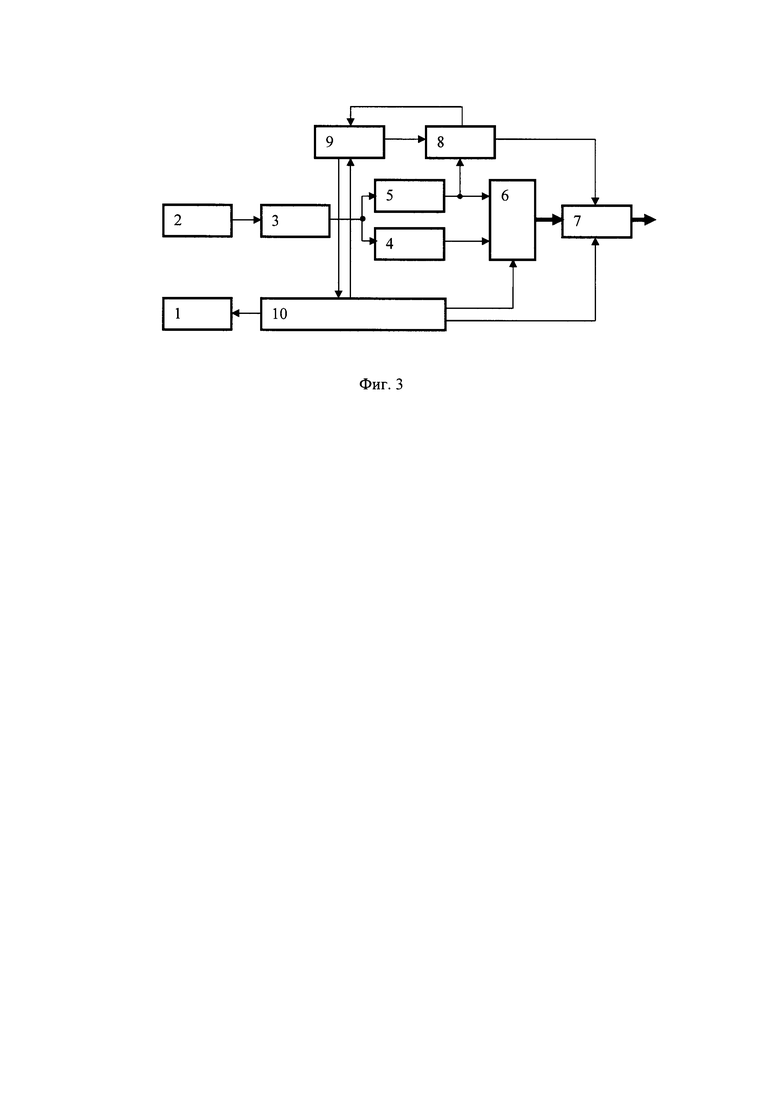
На фиг. 3 приведен вариант структуры для реализации способа.
Смесь принятого сигнала и шума (фиг. 1) образует реализацию случайного процесса, подвергаемую анализу путем сравнения с одним или несколькими аналоговыми порогами. В представленном на фиг. 1 двухуровневом варианте [6] эту реализацию сравнивают с аналоговыми порогами, расположенными симметрично относительно нулевого уровня. Если в данном цикле зондирования в каком-либо дискрете времени реализация пересекает положительный пороговый уровень u+вверх, то регистрируют это генерацией и добавлением к накапливаемой сумме числа +1, а если реализация пересекает отрицательный пороговый уровень и. вниз, то к накапливаемой сумме добавляют число минус 1. По окончании серии из N зондирований в каждой дискрете сравнивают накопленную сумму М с пороговым числом М* и, в случае превышения этого числа, принимают решение о наличии сигнала в данной дискрете (фиг. 2а).
Предварительную серию накопления проводят для выявления сильных отраженных сигналов. При наличии такого сигнала, определяемого при объеме накопления N' по критерию N'-М'≤m, накопление прекращают и принимают решение о наличии сигнала,
Объем N основной серии при обнаружении слабых сигналов устанавливают, исходя из допустимого времени накопления, ожидаемой амплитуды отраженных сигналов, определяемой характером цели, требованиями по точности измерений и энергетического потенциала локационной системы [7, 8].
Объем N' предварительной серии определяют следующим образом.
Относительная частота недостоверных измерений соответствует схеме Бернулли для случайных альтернативных событий и подчиняется биномиальному распределению [3].
При этом математическое ожидание оценки W частоты недостоверных измерений m/n в серии из n испытаний

Дисперсия оценки частоты недостоверных измерений

где р - ожидаемая вероятность события.
Среднеквадратическое отклонение оценки

При оценке W вероятности пропуска сигнала путем подсчета относительной частоты пропусков [3] как отношения количества m* пропусков и полного объема серии n приемочное количество m*=m*пр определяется выражением

где р - заданная вероятность пропуска; х**** - доверительный коэффициент.
При минимально значимой величине m*пр=1 из (4) следует минимальный объем серии

где 
Согласно методу интервальных оценок [3] верхняя граница доверительной вероятности при n>>1 описывается формулой

где W=m/n;
t - доверительный коэффициент, определяемый из выражения: Ф(t)=γ/2:
γ - доверительная вероятность;
Ф(t) - функция Лапласа.
При W<<1 выражение (6) упрощается

откуда

Такая методика позволяет устанавливать минимальный объем предварительной серии, достаточный для проведения измерений с заданной вероятностью правильного обнаружения D=1-W, то есть за минимально возможное время Т'.
Пример 1
p=0,l; m=1; t~2 (соответствует доверительной вероятности 0,95) [3, с. 226)].
Минимальный объем 
То есть, если в пробной серии не было ни одного пропуска или произошел один пропуск, то дальность до цели считают измеренной, и накопление прекращают.
Замечание. При указанных параметрах предварительной серии и при выбранных оптимальных [7] значениях порогов относительно среднеквадратического уровня шума событие N'-М'≥m за счет шумовых выбросов в отсутствие сигнала практически невозможно вследствие близости к нулю вероятности такого события.
Если в предварительной серии произошло более одного пропуска, то серия может быть продолжена до выполнения условия (8).
Пример 2
р=0,1; m=2; t=2.
Пример 3
р=0,1; m=16; t=2.
Подобным образом можно продолжать поэтапное наращивание предварительной серии до тех пор, пока объем N' не достигнет максимального объема N'=N.
На фиг. 3 приведена схема осуществления способа. Реализующее его устройство содержит частотный лазерный излучатель 1, фотоприемник 2, усилитель 3, пороговые устройства 4 и 5, многоканальный накопитель 6 и решающее устройство 7. На выходе порогового устройства 5 имеется счетчик 8 с времязадающей схемой 9. Синхронизация системы производится блоком управления 10.
По команде с блока управления 10 запускается лазер 1, периодически излучающий зондирующие импульсы в сторону цели. Отраженные целью сигналы принимаются фотоприемником 2. Смесь сигнала с шумом через усилитель 3 поступает на входы пороговых устройств 4 и 5. Пороговые устройства [6, 7] имеют одинаковые пороги разной полярности (фиг. 1). При срабатывании порогового устройства 4 в накопитель отправляется минус 1, а при срабатывании устройства 5 - плюс 1. Среднее значение накопленного шума, таким образом, равно нулю. Сигнал имеет положительную полярность и при повторении зондирований постепенно увеличивает среднее значение накопленной суммы, до тех пор, пока накопленной суммой не будет превышено пороговое число в том канале дальности (дискрете), в котором находится сигнал. Номер этой дискреты, соответствующий задержке отраженного сигнала, передается в решающее устройство 7, где вычисляется дальность до цели. Одновременно с началом накопления запускается времязадающая схема 9, определяющая необходимый объем накопления N' за время предварительного накопления. Счетчик 8, включенный на выходе порогового устройства 5 с положительным порогом, регистрирует срабатывания от сильных сигналов и, если за время предварительного накопления число этих срабатываний М' отличается от числа N' не более, чем на заданную величину т, то решающее устройство завершает измерение, накопление прекращается, и на выход решающего устройства выдается измеренная дальность. Если в течение времени предварительного накопления число пропусков m превышает допустимое значение, то счетчик 8 выдает сигнал на времязадающую схему, которая увеличивает время предварительного накопления согласно условию (8), и процесс накопления продолжается до получения результата измерения с заданными доверительными характеристиками.
Предлагаемый способ обладает следующими преимуществами.
1 Данная процедура выделения сигнала на фоне шумов обеспечивает минимальное время обработки с заданными обнаружительными характеристиками, близкое к теоретическому пределу, обеспечиваемому критерием (8).
2 Сокращение объема накопления сигнала способствует сохранению ресурса аппаратуры, в первую очередь излучателя и источника питания.
3 Сокращение времени обработки до минимума позволяет применять способ не только для одиночных измерений, но и в частотном режиме, например, при измерении скорости цели [9].
4 Предлагаемый способ выделения сигнала из шумов обладает устойчивостью к шумам взрывного характера, например, к микроплазменным импульсам, возникающим в фотоприемнике (лавинном фотодиоде) [10].
5 Способ реализуется простейшими аппаратными средствами, позволяющими реализовать его в миниатюрной аппаратуре, эксплуатируемой в широком диапазоне условий внешней среды.
Таким образом, обеспечивается решение поставленной задачи - оптимальный выбор режима накопления в зависимости от характера локационной обстановки.
Источники информации
1 Я.Д. Ширман, В.Н. Голиков. «Основы теории обнаружения радиолокационных сигналов и измерения их параметров». Изд. «Советское радио», М., 1963 г., с. 179.
2 Я.Д. Ширман, В.Н. Манжос. Теория и техника обработки радиолокационной информации на фоне помех. М., «Радио и связь», 1981, с. 81-83.
3 В.Е. Гмурман. Теория вероятностей и математическая статистика. М., «Высшая школа», 1977 г., 479 с.
4 В.Г. Вильнер. Проектирование пороговых устройств с шумовой стабилизацией порога. Оптико-механическая промышленность, 1984 г., №5, с. 39-41.
5 Патент WO 2005/006016 A1 "Laser rangefinder and method thereof.
6 Патент РФ №2359226 по з-ке №2007137271 о 10.10.2007. «Способ некогерентного накопления светолокационных сигналов». - Прототип.
7 В.Г. Вильнер и др. Оценка возможностей светолокационного импульсного измерителя дальности с накоплением. Фотоника, 2007, №6, с. 22-27.
8 В.Г. Вильнер и др. Достоверность измерений импульсного лазерного дальномера. Фотоника, 2013, №3, с. 42-60.
9 В.Г. Вильнер и др. Пути достижения предельной точности лазерного скоростемера. Мир измерений, 2010, №7, с. 17-21.
10 Филачев A.M., Таубкин И.И., Тришенков М.А. Твердотельная фотоэлектроника. Физические основы. М., Физматкнига. 2007, с. 345.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ некогерентного накопления светолокационных сигналов | 2022 |
|
RU2788940C1 |
| Способ некогерентного накопления импульсных светолокационных сигналов | 2022 |
|
RU2791151C1 |
| СПОСОБ НЕКОГЕРЕНТНОГО НАКОПЛЕНИЯ СВЕТОЛОКАЦИОННЫХ СИГНАЛОВ | 2011 |
|
RU2455615C1 |
| Способ импульсного локационного измерения дальности | 2022 |
|
RU2792086C1 |
| СПОСОБ НЕКОГЕРЕНТНОГО НАКОПЛЕНИЯ СВЕТОЛОКАЦИОННЫХ СИГНАЛОВ | 2007 |
|
RU2359226C1 |
| СПОСОБ СВЕТОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2007 |
|
RU2359228C1 |
| СПОСОБ СВЕТОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2007 |
|
RU2390724C2 |
| СПОСОБ СВЕТОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2007 |
|
RU2359227C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ И СКОРОСТИ УДАЛЕННОГО ОБЪЕКТА | 2014 |
|
RU2562148C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2558694C1 |
Изобретение относится к приему оптических сигналов, к технике приема сигналов с помощью лавинных фотодиодов. Способ накопления светолокационных сигналов, включающий N циклов зондирования цели, в каждом из которых производят сравнение отраженного целью сигнала с пороговым уровнем и накопления количества М превышений порога, по которому судят о наличии сигнала, предварительно производят серию N'(p,t,m) зондирований, подтверждающих заданную вероятность достоверного измерения для сигналов, превышающих пороговую величину, где р - допустимая вероятность пропуска сигнала, t - коэффициент, определяемый из выражения Ф(t)=γ/2, γ - доверительная вероятность, Ф(t) - функция Лапласа, m - заданное допустимое число пропусков сигнала в предварительной серии, определяют в этой серии количество превышений порога М' и, при выполнении условия N'-М'≤m, накопление прекращают и принимают решение о наличии сигнала, причем, объем предварительной серии определяют по формуле  где m=1, 2, 3… Технический результат - оптимальный выбор режима накопления в зависимости от характера локационной обстановки. 1 з.п. ф-лы, 3 ил.
где m=1, 2, 3… Технический результат - оптимальный выбор режима накопления в зависимости от характера локационной обстановки. 1 з.п. ф-лы, 3 ил.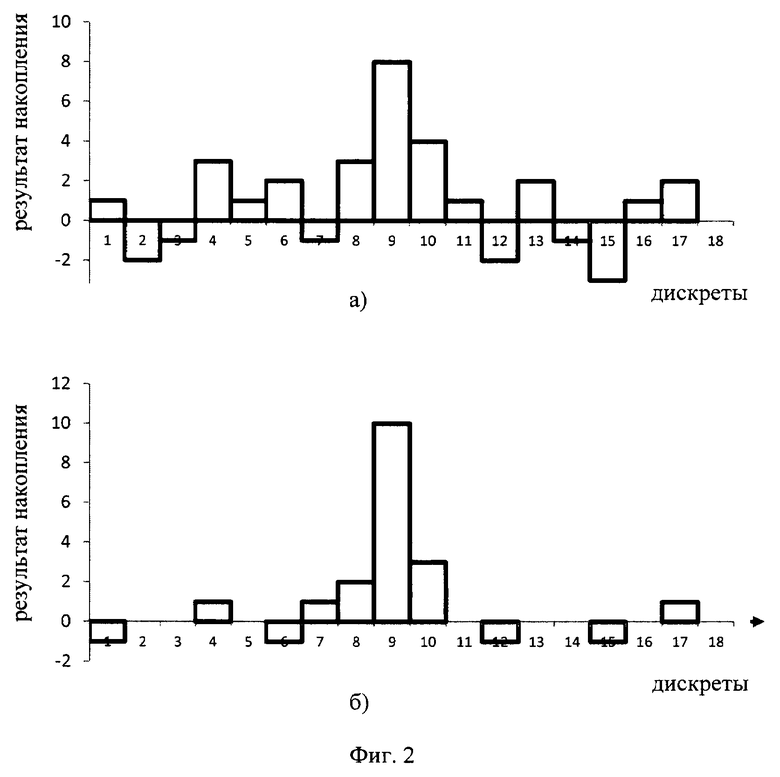
1. Способ накопления светолокационных сигналов, включающий N циклов зондирования цели, в каждом из которых производят сравнение отраженного целью сигнала с пороговым уровнем и накопления количества М превышений порога, по которому судят о наличии сигнала, отличающийся тем, что предварительно производят серию N'(p,t,m) зондирований, подтверждающих заданную вероятность достоверного измерения для сигналов, превышающих пороговую величину, где р - допустимая вероятность пропуска сигнала, t - коэффициент, определяемый из выражения Ф(t)=γ/2, γ - доверительная вероятность, Ф(t) - функция Лапласа, m - заданное допустимое число пропусков сигнала в предварительной серии, определяют в этой серии количество превышений порога М' и, при выполнении условия N'-М'≤m, накопление прекращают и принимают решение о наличии сигнала, причем, объем предварительной серии определяют по формуле  где m=1, 2, 3…
где m=1, 2, 3…
2. Способ по п. 1, отличающийся тем, что при проведении предварительной серии поочередно присваивают параметру m значения 1, 2 и т.д., если в предыдущей серии не выполняется условие N'-М'≤m.
| Способ некогерентного накопления светолокационных сигналов | 2022 |
|
RU2788940C1 |
| Способ некогерентного накопления импульсных светолокационных сигналов | 2022 |
|
RU2791151C1 |
| Способ порогового обнаружения оптических сигналов | 2020 |
|
RU2755602C1 |
| СПОСОБ НЕКОГЕРЕНТНОГО НАКОПЛЕНИЯ СВЕТОЛОКАЦИОННЫХ СИГНАЛОВ | 2007 |
|
RU2359226C1 |
| US 7499829 B2, 03.03.2009 | |||
| US 7184130 B1, 27.02.2007. | |||
