Изобретение относится к лазерной технике, а именно к лазерной дальнометрии.
Известны способы лазерного зондирования удаленных объектов для получения информации об их дальности и других характеристиках. Известен способ определения дальности до цели, включающий посылку на цель лазерного импульса S0(t,t0), регистрацию момента посылки t0, прием отраженного целью излучения S(t,tD), регистрацию момента приема tD и определение временного интервала τ=tD-t0, по которому судят о дальности D до цели [1] по формуле D=сτ/2, где с - скорость света. Недостатком этого способа является необходимость применения мощных излучателей и высокочувствительных приемников для обеспечения широкого диапазона измерений дальности.
Энергетический потенциал измерителя дальности может быть увеличен за счет многократного повторения измерений (накопления), в частности методом некогерентного накопления. При таком способе характеристики обнаружения (вероятности ошибочного измерения или пропуска сигнала) могут быть улучшены за счет статистической обработки результатов многократного зондирования по их совокупности [2].
Наиболее близким по технической сущности к предлагаемому способу является способ некогерентного накопления светолокационных сигналов, включающий серию из N циклов зондирования, в каждом цикле зондирования производят посылку зондирующего светового импульса S0(t,t0), где t - текущее время, t0 - момент излучения зондирующего импульса, квантуют время на отдельные дискреты длительностью Т, образуя тем самым ячейки дальности, в каждой из дискрет времени осуществляют прием отраженного сигнала S(t, tD), где tD - момент приема отраженного импульса, определяют его значение Sjm, накапливают значения Sjm в каждой j-й ячейке дальности путем формирования их сумм  и по массиву сумм {Sj} судят о задержке τ принятого сигнала относительно зондирующего импульса τ=tR-t0, по которой определяют дальность до цели D=сτ/2, где с - скорость света, j=1, 2,… J - порядковый номер ячейки дальности, начиная от момента t0, J - количество ячеек дальности; m=1, 2,… N - порядковый номер зондирования [3].
и по массиву сумм {Sj} судят о задержке τ принятого сигнала относительно зондирующего импульса τ=tR-t0, по которой определяют дальность до цели D=сτ/2, где с - скорость света, j=1, 2,… J - порядковый номер ячейки дальности, начиная от момента t0, J - количество ячеек дальности; m=1, 2,… N - порядковый номер зондирования [3].
При большой максимальной дальности до цели, то есть при слабом отраженном целью сигнале, этот способ требует значительного объема накопления N и, соответственно, большого времени измерения. Этот может быть нежелательным и даже недопустимым при высоких требованиях к оперативности проведения измерений, например, если цель движется или доступна для наблюдения на короткое время.
Задачей изобретения является повышение оперативности измерения дальности при максимальной дальности действия и минимальных энергетических затратах.
Указанная задача решается за счет того, что в известном способе некогерентного накопления светолокационных сигналов, включающем серию из N циклов зондирования, в каждом цикле зондирования производят посылку зондирующего светового импульса S0(t,t0), где t - текущее время, t0 - момент излучения зондирующего импульса, квантуют время на отдельные дискреты длительностью Т, образуя тем самым ячейки дальности, в каждой из дискрет времени осуществляют прием отраженного сигнала S(t, tD), где tD - момент приема отраженного импульса, определяют его значение Sjm, накапливают значения Sjm в каждой j-й ячейке дальности путем формирования их сумм  , и по массиву сумм {Sj} судят о задержке τ принятого сигнала относительно зондирующего импульса τ=tR-t0, по которой определяют дальность до цели R=сτ/2, где с - скорость света, j=1, 2,… J - порядковый номер ячейки дальности, начиная от момента t0, J - количество ячеек дальности, m=1, 2,… N - порядковый номер зондирования, устанавливают длительность tи зондирующего импульса в пределах от 2Т до ΔTD, где ΔТD - заданная разрешающая способность по дальности, предварительно производят оцифровку зондирующего импульса путем определения его выборочных значений S0j с периодом выборок, равным тактовому периоду Т, где j=1, 2,… К - порядковый номер выборки начиная от момента t0, К=tи/T - количество выборок, и регистрации массива {S0j} этих выборочных значений, а по завершении накопления пошагово сдвигают массив {Sj} относительно {S0j}, на каждом шаге р=1, 2,… Рmах проверяя степень их совпадения по заранее установленному критерию, например, по коэффициенту корреляции
, и по массиву сумм {Sj} судят о задержке τ принятого сигнала относительно зондирующего импульса τ=tR-t0, по которой определяют дальность до цели R=сτ/2, где с - скорость света, j=1, 2,… J - порядковый номер ячейки дальности, начиная от момента t0, J - количество ячеек дальности, m=1, 2,… N - порядковый номер зондирования, устанавливают длительность tи зондирующего импульса в пределах от 2Т до ΔTD, где ΔТD - заданная разрешающая способность по дальности, предварительно производят оцифровку зондирующего импульса путем определения его выборочных значений S0j с периодом выборок, равным тактовому периоду Т, где j=1, 2,… К - порядковый номер выборки начиная от момента t0, К=tи/T - количество выборок, и регистрации массива {S0j} этих выборочных значений, а по завершении накопления пошагово сдвигают массив {Sj} относительно {S0j}, на каждом шаге р=1, 2,… Рmах проверяя степень их совпадения по заранее установленному критерию, например, по коэффициенту корреляции  , где Рmах - максимальное число шагов, соответствующее диапазону измерения дальности, определяют порядковый номер шага Р, на котором степень совпадения массивов {Sj} и {S0j} оптимально соответствует принятому критерию, и определяют дальность D до цели по формуле D=сРТ/2, причем в процессе накопления определяют оценки среднеквадратического отклонения σs выборочных значений Sjm и их среднего значения Ms, устанавливают порог накопления CN=QσS+MS, где Q - коэффициент превышения порога над шумом, определяемый из условия обеспечения максимальной вероятности правильного обнаружения в каждой ячейке дальности при заданной вероятности ложной тревоги во всем диапазоне измеряемых дальностей, и прекращают процесс накопления при количестве зондирований N, когда хотя бы в одной из ячеек дальности накопленная сумма Sj превысит пороговую величину CN.
, где Рmах - максимальное число шагов, соответствующее диапазону измерения дальности, определяют порядковый номер шага Р, на котором степень совпадения массивов {Sj} и {S0j} оптимально соответствует принятому критерию, и определяют дальность D до цели по формуле D=сРТ/2, причем в процессе накопления определяют оценки среднеквадратического отклонения σs выборочных значений Sjm и их среднего значения Ms, устанавливают порог накопления CN=QσS+MS, где Q - коэффициент превышения порога над шумом, определяемый из условия обеспечения максимальной вероятности правильного обнаружения в каждой ячейке дальности при заданной вероятности ложной тревоги во всем диапазоне измеряемых дальностей, и прекращают процесс накопления при количестве зондирований N, когда хотя бы в одной из ячеек дальности накопленная сумма Sj превысит пороговую величину CN.
Для оценки среднеквадратического отклонения σS выборочных значений Sjm и их среднего значения MS можно в одном из массивов {Sjm}, например, в массиве {Sj1} выделить группу статистически независимых выборочных значений в количестве М, и затем определить оценки среднего значения MS и среднеквадратического отклонения σS по формулам  ;
; 
 , причем количество выборочных значений в этой группе предварительно устанавливают из условия обеспечения заданной точности оценок, например, с помощью уравнения
, причем количество выборочных значений в этой группе предварительно устанавливают из условия обеспечения заданной точности оценок, например, с помощью уравнения
где
q - допустимая погрешность оценки;
γ - надежность оценки;
 - плотность распределения случайной величины %;
- плотность распределения случайной величины %;
 ;
;
 - оценка величины обусловленного шумом среднеквадратического разброса выборок в массиве {Sj};
- оценка величины обусловленного шумом среднеквадратического разброса выборок в массиве {Sj};
σ>0 - непрерывный параметр, имеющий размерность σS.
Вероятность правильного обнаружения сигнала во всем диапазоне измеряемых дальностей может быть увеличена, если в начале измеряемого интервала дальностей коэффициент Q устанавливают с превышением относительно среднего значения, а по мере увеличения порядкового номера j уменьшают его таким образом, чтобы вероятность ложной тревоги во всем измеряемом диапазоне дальностей не превышала заданного предела, причем начальное превышение коэффициента Q и его значения, соответствующие текущей дальности, задают из условия соблюдения требуемой вероятности обнаружения сигнала в каждой из ячеек дальности.
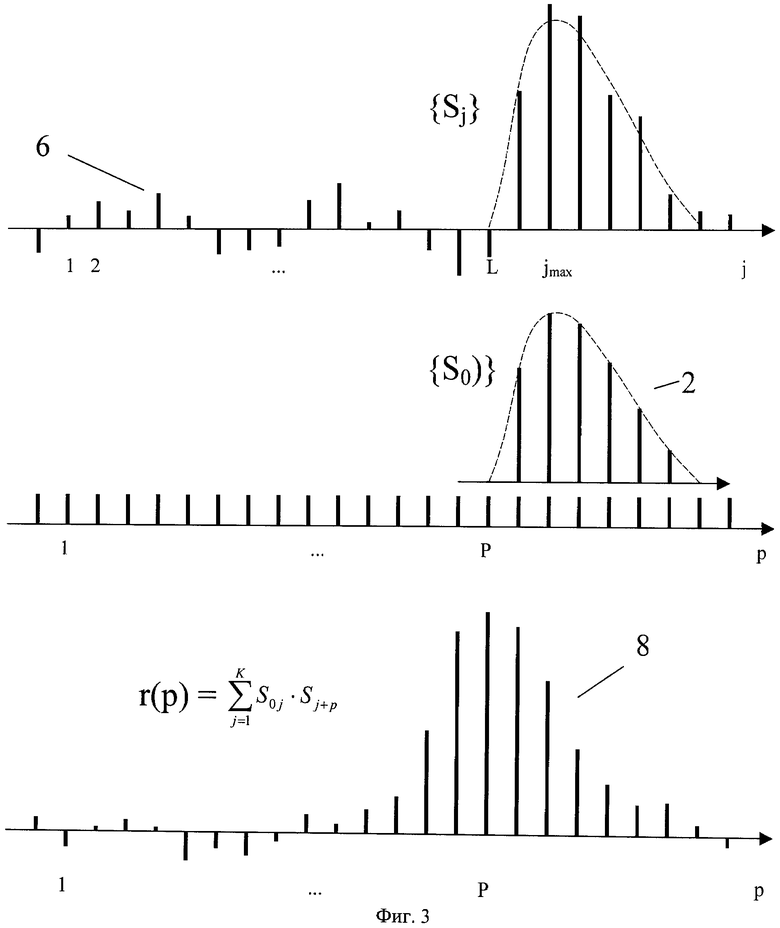
На Фиг.1 представлена временная диаграмма процесса зондирования и его привязка к тактовой частоте. Фиг.2 иллюстрирует формирование массива {Sj} путем накопления массивов {Sjm}. На Фиг.3 показано формирование функции корреляции R(p) массивов {Sj} и {S0j}.
В момент времени t0 в направлении цели посылают зондирующий импульс S0(t,t0) 1, соответствующий своим выборочным значениям, хранящимся в массиве {S0j} 2, и затем принимают отраженный целью импульс S(t,tD) 3. Момент излучения зондирующего импульса 1 привязан к тактовой последовательности 4 путем присвоения импульсу тактовой последовательности, совпадающему с моментом t0, порядкового номера j=1. Тактовые импульсы генерируют с помощью высокостабильного источника с частотой FT=1/Т, где Т - период следования тактовых импульсов. Массив 2 получают предварительно путем пробной посылки зондирующего импульса и его оцифровки с тактовой частотой FT. Массив 2 сохраняют в памяти системы и обновляют его в процессе подготовки к измерениям каждый раз, когда это требуется по условиям метрологической калибровки. При каждом m-м зондировании принятый сигнал 3 оцифровывают путем определения его выборочных значений Sjm в моменты генерации каждого j-го тактового импульса; нумерация отсчетов Sjm ведется от тактового импульса с номером j=1. Полученные выборочные значения регистрируют в массивах {Sjm}, хранящихся в памяти системы (Фиг.2). По выборочным значениям Sj1 массива {Sj1} определяют статистические характеристики принимаемой смеси сигнала с шумом. Для этого выделяют часть массива {Sj1}, ограниченную номерами ячеек дальности J1 и J2, и определяют оценки среднего значения MS и среднеквадратического отклонения σS1 по формулам ;  , где J1 и J2 - границы части массива, выделенной для определения MS и σS1, а затем определяют величину среднеквадратического разброса
, где J1 и J2 - границы части массива, выделенной для определения MS и σS1, а затем определяют величину среднеквадратического разброса  , причем количество выборочных значений в этой группе М=(J2-J1+1) предварительно устанавливают из условия обеспечения заданных доверительных интервалов разброса этих оценок. Например, если задана допустимая погрешность определения доверительного интервала q с надежностью оценки γ, то по известной методике [4, стр.221] можно определить необходимое для этого количество выборок М. Для этого необходимо решить уравнение
, причем количество выборочных значений в этой группе М=(J2-J1+1) предварительно устанавливают из условия обеспечения заданных доверительных интервалов разброса этих оценок. Например, если задана допустимая погрешность определения доверительного интервала q с надежностью оценки γ, то по известной методике [4, стр.221] можно определить необходимое для этого количество выборок М. Для этого необходимо решить уравнение
где
γ - надежность оценки;
- плотность распределения случайной величины %;
;
 - оценка величины обусловленного шумом среднеквадратического разброса выборок в массиве {Sj};
- оценка величины обусловленного шумом среднеквадратического разброса выборок в массиве {Sj};
σ - непрерывный параметр, имеющий размерность σS.
На практике для определения М предварительно задаются погрешностью q и надежностью оценки γ, после чего определяют М по заранее вычисленным зависимостям, например, по [4, стр.464, Приложение 4]. Так, при допустимой двадцатипроцентной ошибке (q=0,2) и надежности γ=0,95 величина массива выборки М=50. Если общее количество ячеек дальности в массиве {Sj1} существенно превышает эту величину, то, очевидно, нет необходимости использовать весь этот массив и достаточно ограничиться его группой из М выборок. Эту группу целесообразно выбирать из конечной части массива {Sj1}, где величина отраженного целью сигнала мала и не может исказить результаты оценки. После определения статистических характеристик MS и σS определяют величину CN порога 6 накопления CN=QσS+MS, где Q - коэффициент превышения порога над шумом, определяемый заранее из условия допустимой вероятности ложного измерения. Например, если для каждого измерения задана вероятность ложной тревоги F=0,01, то при равномерном распределении этого параметра вдоль трассы в каждой ячейке дальности вероятность ложной тревоги не должна превышать Fj=F/J, где J - количество ячеек дальности. Так, при J=1000 вероятность Fj=10-5. Коэффициент Q определяется из условия 0,5-Ф(Q)=Fj, где

Для определения Q по заданному значению Fj можно воспользоваться приближенным соотношением
 , с высокой точностью справедливым для Q>2.
, с высокой точностью справедливым для Q>2.
Для указанного значения Fj=10-5 величина Q~4,4.
В соответствии с предложением коэффициент Q изменяют в зависимости от дальности (от номера ячейки дальности) таким образом, чтобы в дальней зоне он уменьшался, обеспечивая более высокую вероятность обнаружения сигнала. При этом суммарная вероятность ложной тревоги во всем диапазоне не ухудшается.
Пример.
Количество ячеек дальности J=1000. Эти ячейки разбиты на два поддиапазона - ближний (I) в количестве 800 ячеек и дальний (II) в количестве 200 ячеек. Вероятности ложной тревоги в поддиапазонах FI=0,002, FII=0,008. FI+FII=0,01, как и в ранее рассмотренном случае с равномерным распределением вероятности F по ячейкам дальности. В рассматриваемом примере в дальнем поддиапазоне II вероятность Fj(II)=FII/200=0,008/200=4·10-5. В поддиапазоне I, соответственно, Fj(II)=FI/800=0,002/800=2,5·10-6. Коэффициенты Q для этих вероятностей соответственно равны:
Q(II)=4; Q(I)=4,6.
Это означает, что в дальней части диапазона измеряемых дальностей чувствительность улучается в Q/Q(II)=4,4/4=1,1 раза, что ведет к соответствующему увеличению дальности действия дальномера. В ближней части диапазона чувствительность ухудшается в Q(I)/Q=4,6/4,4=1,05 раза, что не влияет на качество измерений, поскольку это ухудшение компенсируется более значительным увеличением принимаемого сигнала: известно [1], что для малоразмерных целей его амплитуда обратно пропорциональна четвертой степени дальности, поэтому отношение амплитуд сигнала, соответствующих 800-й и 1000-й ячейкам дальности, равно (1000/800)4~2,5 раза, что значительно превышает потери за счет увеличения Q в этой области.
По окончании процесса накопления и выделения массива {Sj} его сравнивают с массивом {S0j} по заранее установленному правилу, например, путем определения коэффициентов корреляции R(p) массивов {Sj} и {S0j} при пошаговом сдвиге второго массива относительно первого на р=1,2,…Рmax шагов [5]. В результате формируют корреляционную функцию  . Затем определяют шаг р=Р, на котором функция R(p) максимальна, и вычисляют дальность D до цели по формуле D-сРТ/2, где с - скорость света.
. Затем определяют шаг р=Р, на котором функция R(p) максимальна, и вычисляют дальность D до цели по формуле D-сРТ/2, где с - скорость света.
Для сокращения времени измерения рекомендуется осуществлять поиск порядкового номера шага Р, при котором значение R(P) оптимально, путем поэтапного приближения по методу деления отрезка пополам, а именно на каждом этапе поиска определяют оценки R(рн) и R(рв) на нижней рн и верхней рв границах зоны поиска и на следующем этапе зону поиска устанавливают между р~(рв+рн)/2 и тем из крайних значений р зоны поиска, оценка которого r(р) на данном шаге приближения наиболее оптимальна, причем на первом этапе поиска рн=p(SC)-tИ/T, а рв=рн+2tи/T, где p(SС) - номер ячейки дальности, в которой накопленная сумма Sj=SС превысила установленный порог CN.
Предлагаемый способ некогерентного накопления светолокационных сигналов обеспечивает измерение дальности при минимальном объеме накопления, при минимальном объеме статистических данных, используемых для определения оптимального режима накопления, а также за минимальное количество шагов. Сокращению объема накопления N существенно способствует также увеличение энергетического потенциала прибора, обусловленное увеличением длительности зондирующего импульса в пределах, допускаемых заданной разрешающей способностью: при этом увеличивается энергия зондирующего сигнала и уменьшается шум в приемном канале благодаря соответствующему сужению его полосы пропускания. В результате достигается максимально возможная оперативность измерения дальности при максимальной дальности действия и минимальных энергетических затратах.
Источники информации
1. В.А.Волохатюк, В.М.Кочетков, P.P.Красовский "Вопросы оптической локации". М., Изд-во "Советское радио", 1971 г., с.176.
2. Я.Д.Ширман, В.Н.Манжос «Теория и техника обработки радиолокационной информации на фоне помех». М., Изд-во «Радио и связь», 1981 г., с.70, 81.
3. Патент РФ №2359226 по заявке 2007137271/28 от 10.10.2007. «Способ некогерентного накопления светолокационных сигналов». - Прототип.
4. В.Е.Гмурман «Теория вероятностей и математическая статистика», М., Изд-во «Высшая школа», 1977 г.
5. Patent US No 5805468.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ | 2011 |
|
RU2451904C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2011 |
|
RU2469269C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ И СКОРОСТИ УДАЛЕННОГО ОБЪЕКТА | 2014 |
|
RU2562148C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И ВЕРТИКАЛЬНОЙ СКОРОСТИ ЛА | 2014 |
|
RU2563607C1 |
| СПОСОБ ВРЕМЕННОЙ ПРИВЯЗКИ ИМПУЛЬСНОГО СВЕТОЛОКАЦИОННОГО СИГНАЛА | 2011 |
|
RU2451950C1 |
| СПОСОБ ОЦЕНКИ ДАЛЬНОСТИ И СКОРОСТИ УДАЛЕННОГО ОБЪЕКТА | 2014 |
|
RU2563608C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ И СКОРОСТИ | 2014 |
|
RU2562147C1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2014 |
|
RU2560011C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЫСОТЫ И ВЕРТИКАЛЬНОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2562150C1 |
| Бортовой лазерный дальномер с определением высоты нижнего края облачности | 2020 |
|
RU2737592C1 |

Способ включает серию из N циклов зондирования. В каждом цикле зондирования производят посылку зондирующего светового импульса S0(t,t0), квантуют время на отдельные дискреты длительностью Т. В каждой из дискрет времени осуществляют прием отраженного сигнала S(t,tD) и определяют его значение Sjm. Накапливают значения Sjm в каждой j-й ячейке дальности путем формирования их сумм  По массиву сумм {Sj} судят о задержке τ принятого сигнала относительно зондирующего импульса τ=tD-t0 и определяют дальность до цели D=сτ/2. Устанавливают длительность tи зондирующего импульса. Предварительно производят оцифровку зондирующего импульса, определяя его выборочные значения S0j с периодом выборок, равным тактовому периоду Т, и регистрируя массив {S0j} этих выборочных значений. По завершении накопления пошагово сдвигают массив {Sj} относительно {S0j}, на каждом шаге р=1, 2,…Рmax проверяя степень их совпадения по установленному критерию, например, по коэффициенту корреляции
По массиву сумм {Sj} судят о задержке τ принятого сигнала относительно зондирующего импульса τ=tD-t0 и определяют дальность до цели D=сτ/2. Устанавливают длительность tи зондирующего импульса. Предварительно производят оцифровку зондирующего импульса, определяя его выборочные значения S0j с периодом выборок, равным тактовому периоду Т, и регистрируя массив {S0j} этих выборочных значений. По завершении накопления пошагово сдвигают массив {Sj} относительно {S0j}, на каждом шаге р=1, 2,…Рmax проверяя степень их совпадения по установленному критерию, например, по коэффициенту корреляции  Определяют порядковый номер шага Р, на котором степень совпадения массивов {Sj} и {S0j} оптимально соответствует принятому критерию, и определяют дальность D до цели по формуле D=cPT/2. Устанавливают порог накопления CN=QσS+MS. Технический результат - достижение максимально возможной оперативности измерения дальности при максимальной дальности действия и минимальных энергетических затратах. 2 з.п. ф-лы, 3 ил.
Определяют порядковый номер шага Р, на котором степень совпадения массивов {Sj} и {S0j} оптимально соответствует принятому критерию, и определяют дальность D до цели по формуле D=cPT/2. Устанавливают порог накопления CN=QσS+MS. Технический результат - достижение максимально возможной оперативности измерения дальности при максимальной дальности действия и минимальных энергетических затратах. 2 з.п. ф-лы, 3 ил.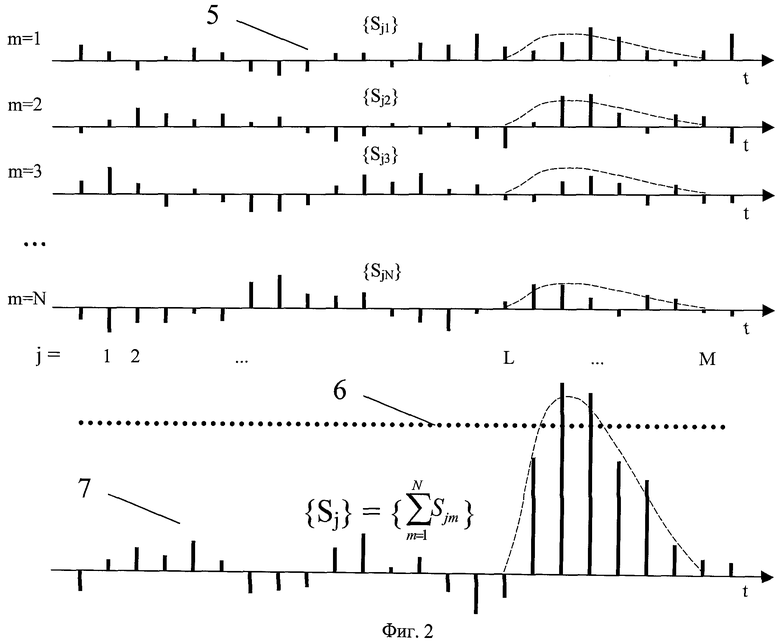
1. Способ некогерентного накопления светолокационных сигналов, включающий серию из N циклов зондирования, в каждом цикле зондирования производят посылку зондирующего светового импульса S0(t,t0), где t - текущее время, t0 - момент излучения зондирующего импульса, квантуют время на отдельные дискреты длительностью Т, образуя тем самым ячейки дальности, в каждой из дискрет времени осуществляют прием отраженного сигнала S(t,tD), где tD - момент приема отраженного импульса, определяют его значение Sjm, накапливают значения Sjm в каждой j-й ячейке дальности путем формирования их сумм , и по массиву сумм {Sj} судят о задержке τ принятого сигнала относительно зондирующего импульса τ=tD-t0, по которой определяют дальность до цели D=сτ/2, где с - скорость света, j=1, 2, … J - порядковый номер ячейки дальности, начиная от момента t0; J - количество ячеек дальности; m=1, 2, … N - порядковый номер зондирования, отличающийся тем, что устанавливают длительность tи зондирующего импульса в пределах от 2Т до ΔТD, где ΔТD - заданная разрешающая способность по дальности, предварительно производят оцифровку зондирующего импульса путем определения его выборочных значений S0j с периодом выборок, равным тактовому периоду Т, где j=1, 2, … К - порядковый номер выборки, начиная от момента t0; K=tи/T - количество выборок, и регистрации массива {S0j} этих выборочных значений, а по завершении накопления пошагово сдвигают массив {Sj} относительно {S0j}, на каждом шаге р=1, 2, … Рmax, проверяя степень их совпадения по заранее установленному критерию, например по коэффициенту корреляции  где Рmax - максимальное число шагов, соответствующее диапазону измерения дальности, определяют порядковый номер шага Р, на котором степень совпадения массивов {Sj} и {S0j} оптимально соответствует принятому критерию, и определяют дальность D до цели по формуле D=cPT/2, причем в процессе накопления определяют оценки среднеквадратического отклонения σS выборочных значений Sjm и их среднего значения MS, устанавливают порог накопления CN=QσS+MS, где Q - коэффициент превышения порога над шумом, определяемый из условия обеспечения максимальной вероятности правильного обнаружения в каждой ячейке дальности при заданной вероятности ложной тревоги во всем диапазоне измеряемых дальностей, и прекращают процесс накопления при количестве зондирований N, когда хотя бы в одной из ячеек дальности накопленная сумма Sj превысит пороговую величину СN.
где Рmax - максимальное число шагов, соответствующее диапазону измерения дальности, определяют порядковый номер шага Р, на котором степень совпадения массивов {Sj} и {S0j} оптимально соответствует принятому критерию, и определяют дальность D до цели по формуле D=cPT/2, причем в процессе накопления определяют оценки среднеквадратического отклонения σS выборочных значений Sjm и их среднего значения MS, устанавливают порог накопления CN=QσS+MS, где Q - коэффициент превышения порога над шумом, определяемый из условия обеспечения максимальной вероятности правильного обнаружения в каждой ячейке дальности при заданной вероятности ложной тревоги во всем диапазоне измеряемых дальностей, и прекращают процесс накопления при количестве зондирований N, когда хотя бы в одной из ячеек дальности накопленная сумма Sj превысит пороговую величину СN.
2. Способ по п.1, отличающийся тем, что в одном из массивов {Sjm}, например в массиве {Sj1}, выделяют группу статистически независимых выборочных значений в количестве М, и затем определяют оценки среднего значения MS и среднеквадратического отклонения σS по формулам ;
 причем количество М выборочных значений в этой группе предварительно устанавливают из условия обеспечения заданной точности оценок, например с помощью уравнения
причем количество М выборочных значений в этой группе предварительно устанавливают из условия обеспечения заданной точности оценок, например с помощью уравнения
где
q - допустимая погрешность оценки;
γ - надежность оценки;
- плотность распределения случайной величины χ.
 - оценка величины обусловленного шумом среднеквадратического разброса выборок в массиве {Sj};
- оценка величины обусловленного шумом среднеквадратического разброса выборок в массиве {Sj};
σ>0 - непрерывный параметр, имеющий размерность σS.
3. Способ по п.1, отличающийся тем, что в начале измеряемого интервала дальностей коэффициент Q устанавливают с превышением относительно среднего значения, а по мере увеличения порядкового номера j уменьшают его таким образом, чтобы вероятность ложной тревоги во всем измеряемом диапазоне дальностей не превышала заданного предела, причем начальное превышение коэффициента Q и его значения, соответствующие текущей дальности, задают из условия соблюдения требуемой вероятности обнаружения сигнала в каждой из ячеек дальности.
| СПОСОБ НЕКОГЕРЕНТНОГО НАКОПЛЕНИЯ СВЕТОЛОКАЦИОННЫХ СИГНАЛОВ | 2007 |
|
RU2359226C1 |
| US 4640613 A, 03.02.1987 | |||
| US 7184130 B1, 27.02.2007. | |||

