Изобретение относится к лазерной технике, а именно к лазерной дальнометрии.
Известен способ некогерентного накопления импульсов при их многократном повторении, например, для обнаружения принимаемых сигналов при лазерном или радиолокационном зондировании удаленных объектов [1-5]. Указанный способ заключается в том, что производят серию циклов зондирования, в каждом цикле зондирования принятый сигнал сравнивают с аналоговым порогом (осуществляют бинарное квантование), подсчитывают количество превышений аналогового порога и принимают решение о наличии сигнала, если это количество превышает заданное число. Этот способ не позволяет реализовать потенциальную вероятность обнаружения сигналов вследствие потери информации при бинарном квантовании принимаемого сигнала.
Наиболее близким по технической сущности к предлагаемому способу является способ некогерентного накопления сигналов, включающий серию циклов зондирования, в каждом цикле зондирования прием отраженного сигнала и сравнение принятого сигнала с одним или несколькими аналоговыми пороговыми уровнями, накопление суммы превышений аналоговых пороговых уровней, по которой после завершения серии судят о наличии сигнала путем сравнения суммы превышений с пороговым числом [6].
Преимущества этого способа максимально реализуются, если прием отраженного сигнала производят с помощью лавинного фотодиода, обладающего по сравнению с другими приемниками наилучшей пороговой чувствительностью [7]. Однако в оптимальном по чувствительности режиме лавинного умножения возможно образование взрывных («телеграфных») шумов, обусловленных микроплазменными пробоями (микроплазмами) в полупроводниковом переходе фотодиода [8]. Микроплазменные импульсы тока имеют прямоугольную форму и постоянную амплитуду, которая возрастает по мере увеличения обратного напряжения. Увеличение амплитуды сопровождается увеличением длительности импульсов и уменьшением скважности [9]. В таком режиме шум лавинного фотодиода состоит из двух независимых составляющих - нормального шума [7] и взрывного шума микроплазм. Микроплазменная составляющая шума фотодиода не сопоставима по статистическим характеристикам с нормальной составляющей, и ее участие в процессе регулирования смещения фотодиода непредсказуемо [10].
Задачей изобретения является обеспечение максимальной вероятности обнаружения светолокационных сигналов методом накопления при наличии микроплазм, возникающих при лавинном умножении сигнала в фотодиоде.
Указанная задача решается за счет того, что в известном способе некогерентного накопления импульсных светолокационных сигналов, включающем K циклов зондирования цели лазерными импульсами, в каждом цикле зондирования прием отраженного сигнала в N каналах дальности, где N=Rmax/ΔR, Rmax - диапазон измеряемых дальностей, ΔR=с τ/2, с - скорость света, τ - тактовый период измерителя задержки отраженного сигнала, в каждом канале дальности сравнение принятого сигнала с одним или несколькими аналоговыми рабочими пороговыми уровнями, накопление суммы превышений аналоговых пороговых уровней с учетом весового коэффициента уровня, по которой судят о наличии сигнала в этом канале путем сравнения суммы превышений с пороговым числом, принимают отраженные сигналы с помощью лавинного фотодиода, в подготовительном режиме в отсутствие зондирующих лазерных импульсов устанавливают для рабочего режима оптимальный коэффициент лавинного умножения Мопт фотодиода, при котором отношение сигнал/шум максимально, в режиме Мопт выявляют наличие импульсов микроплазм и определяют минимальную амплитуду импульсов микроплазм UMmin, устанавливают дополнительный пороговый уровень UM в пределах Ucmax<UM<UMmin, где Ucmax - максимальная ожидаемая амплитуда сигнала, после чего переходят в рабочий режим накопления сигнала, в каждом j-м канале дальности накапливают взвешенные суммы Σj превышений рабочих порогов, параллельно в каждом j-м канале дальности накапливают суммы ΣMj превышений уровня UM, по окончании серии циклов зондирования в каждом канале дальности вычисляют разностные величины ΔΣj=Σj-ΣMj и, если ΔΣj превышает заранее установленное пороговое число, то принимают решение о наличии сигнала в данном канале дальности и по номеру этого канала дальности судят о дальности до цели.
Оптимальный режим Mopt устанавливают, включая безлавинный режим смещения фотодиода М=1, затем устанавливают порог срабатывания U на уровне, соответствующем частоте шумовых срабатываний порогового устройства f<<f0, где f0 - частота пересечения шумом нулевого уровня, после этого увеличивают порог в  раз, где α - параметр шум-фактора лавинного умножения F=Мα, порог
раз, где α - параметр шум-фактора лавинного умножения F=Мα, порог  фиксируют и с помощью напряжения смещения фотодиода устанавливают такой коэффициент лавинного умножения М=Мопт, при котором частота fM шумовых превышений порога UM становится равной частоте f в безлавинном режиме М=1 при пороге U, по достижении частоты fM=f фиксируют достигнутый коэффициент лавинного умножения М=Мопт и включают рабочий режим приема сигналов.
фиксируют и с помощью напряжения смещения фотодиода устанавливают такой коэффициент лавинного умножения М=Мопт, при котором частота fM шумовых превышений порога UM становится равной частоте f в безлавинном режиме М=1 при пороге U, по достижении частоты fM=f фиксируют достигнутый коэффициент лавинного умножения М=Мопт и включают рабочий режим приема сигналов.
Если амплитуда сигнала в рабочем режиме превышает пороговый уровень UM, то уменьшают коэффициент лавинного умножения до уровня 1≤М≤Мопт, при котором нелинейные искажения сигнала минимальны.
Если в каком-либо из каналов дальности регистрируется сигнал в двух циклах накопления подряд, то принимают решение о наличии цели в данном канале и прекращают накопление, при этом вероятность появления двух подряд микроплазм в любом канале дальности не должна превышать величины W2N=W2⋅N<(1-D), где W2 - вероятность двух подряд микроплазм в одном канале дальности; N - число каналов дальности; D - заданная вероятность правильного обнаружения сигнала.
На фиг. 1 представлена циклограмма способа. На фиг. 2 - характер смеси сигнала и флуктуационного шума на входе двухпорогового амплитудного анализатора. На фиг. 3 показана схема возможной аппаратурной реализации.
На первой стадии подготовительного режима (фиг. 1) напряжение смещения фотодиода соответствует коэффициенту лавинного умножения М=1. При этом преобладают флуктуационные шумы предусилителя со средним квадратом шумового тока I02. По частоте f превышения имеющихся пороговых уровней выбросами шума можно судить о среднеквадратическом значении шума. Для порога U известно соотношение  , где
, где  - частота пересечения шумом нулевого порога; R''(0) - вторая производная корреляционной функции шума на входе порогового устройства R(t) при задержке t=0; σ2 - дисперсия шума I02 в размерности порога U.
- частота пересечения шумом нулевого порога; R''(0) - вторая производная корреляционной функции шума на входе порогового устройства R(t) при задержке t=0; σ2 - дисперсия шума I02 в размерности порога U.
Из этого следует, что если в безлавинном режиме М=1 порогу U соответствует частота f, то при повышении порога в  раз и установлении лавинного режима, при котором увеличенному порогу соответствует та же частота f шумовых превышений, коэффициент лавинного умножения М=Мопт, обеспечивает максимальное отношение сигнал/шум [14]. В первой стадии подготовительного режима в течение времени Тподг1 устанавливают порог U (фиг. 1) Во второй стадии подготовительного режима устанавливают порог
раз и установлении лавинного режима, при котором увеличенному порогу соответствует та же частота f шумовых превышений, коэффициент лавинного умножения М=Мопт, обеспечивает максимальное отношение сигнал/шум [14]. В первой стадии подготовительного режима в течение времени Тподг1 устанавливают порог U (фиг. 1) Во второй стадии подготовительного режима устанавливают порог  и увеличивают напряжение смещения фотодиода до тех пор, пока частота шумовых превышений снова не станет равна f. Тем самым, устанавливают оптимальный коэффициент лавинного умножения Мопт, после чего включают рабочий режим приема светолокационных сигналов.
и увеличивают напряжение смещения фотодиода до тех пор, пока частота шумовых превышений снова не станет равна f. Тем самым, устанавливают оптимальный коэффициент лавинного умножения Мопт, после чего включают рабочий режим приема светолокационных сигналов.
В режиме приема в каждом канале дальности накапливают взвешенные суммы Σj превышений порогов с весовыми коэффициентами, соответствующими превышенным пороговым уровням [11]. Одновременно с этим процессом производят аналогичное многоканальное накопление превышений высокого порога UM, соответствующих выбросам большой амплитуды, идентифицируемым как микроплазмы. В каждом канале дальности накапливаются суммы этих превышений ΣMj. Разность этих сумм ΔΣj=Σj-ΣMj характеризует уровень полезного сигнала, и при превышении величиной ΔΣj порогового значения принимают решение о наличии светолокационного сигнала в j-м канале дальности.
В соответствии с предлагаемым решением ложные срабатывания от микроплазм исключаются из смеси сигнал + шум. Особенности дальнейшего выделения сигнала исследованы в [11]. Существенным критерием является эффективность Е накопления, представляющая собой улучшение отношения сигнал/шум на входе и выходе накопителя:

где М(k) - средняя величина накопленной суммы;
σK - среднеквадратическое отклонение накопленной суммы после К циклов накопления;
А - амплитуда сигнала на входе накопителя;
σ - среднеквадратическое значение входного шума.
Исследована [11] зависимость эффективности накопления от относительной величины пороговых уровней Δu/σ при их симметричном положении от нулевого уровня (фиг. 2). При оптимальном положении порогов двухуровневый и четырехуровневый режимы накопления с симметричным размещением пороговых уровней по эффективности приближаются к теоретическому пределу
Существует оптимальное значение коэффициента лавинного умножения М, которое в отсутствие микроплазм можно определить следующим образом. На выходе лавинного фотодиода действует эквивалентный квадрат шумового тока:

где I02 - квадрат неумножаемого эквивалентного шумового тока;

е - заряд электрона;
I1 - первичный обратный ток фотодиода;
Δf - полоса пропускания приемного тракта до входа порогового устройства;
М - коэффициент лавинного умножения;
Мα - шум-фактор лавинного умножения;
α - коэффициент, определяемый материалом фотодиода.
Квадрат W отношения шум/сигнал:

где JM2=2eI1Δƒ.

Условие нуля производной:

или

откуда 

Задача настоящего изобретения решается благодаря аппаратной интерпретации микроплазм не как ложных тревог, а как факторов пропуска сигнала. За счет этого приема можно допустить более высокую вероятность микроплазм и, тем самым, поддерживать коэффициент лавинного умножения ближе к оптимальному уровню (6).
На фиг. 3 показан пример многопороговой (например, двухпороговой) структуры для реализации способа.
Эта локационная структура содержит передающий канал 1, фотоприемный канал 2 со схемой стабилизации лавинного режима фотодиода 3, рабочее многопороговое устройство 4 и дополнительное пороговое устройство 5, подключенные к многоканальным накопителям 6 и 7. Выходные данные накопителей поступают в решающее устройство 8. На выходе фотоприемного канала включен анализатор шума 9, выход которого через схему управления 10 подключен к управляющему входу схемы стабилизации лавинного режима фотодиода 3. Схема управления подключена также к передающему каналу 1 и накопителям 6 и 7, а также к решающему устройству 8.
Перед приемом сигналов включают фотоприемный канал и выводят его в оптимальный режим. Для этого включают анализатор шума 9. Анализатор шума представляет собой пороговое устройство с низким порогом U, таким, что частота его превышений выбросами шума f>>fM*, где fM* - ожидаемая частота микроплазм. При таком условии микроплазмы не влияют на режим фотодиода. По достижении установившегося значения f схема 9 увеличивает порог в  раз и повышает напряжение смещения фотодиода до тех пор, пока не восстановится частота f, при которой коэффициент лавинного умножения М соответствует уровню Мопт. После этого переходят в рабочий режим. По команде от блока управления 10 передающий канал 1 излучает на цель серию K зондирующих импульсов. Одновременно блок управления запускает синхронизацию многоканальных накопителей 6 и 7, переключая их ячейки накопления с периодом τ (фиг. 2). Отраженные целью сигналы принимаются фотоприемным каналом 2, на выходе которого образуется смесь отраженного сигнала, флуктуационного шума и импульсов микроплазм. С выходов порогового устройства 4 сигналы поступают поочередно в ячейки накопителя 6, соответствующие текущему каналу дальности, включаемому тактовым сигналом блока управления 10. Сигналы в накопителе 6 суммируются с весом, соответствующим превышенному порогу. Например, при двухуровневом преобразовании с симметричным положением порогов относительно нуля при пересечении шумовым выбросом верхнего порога вверх в накопитель заносится «+1», а при пересечении нижнего порога вниз заносится «-1». При таком построении аппаратуры обеспечивается выигрыш Е в улучшении отношения сигнал/шум, близкий к теоретическому пределу
раз и повышает напряжение смещения фотодиода до тех пор, пока не восстановится частота f, при которой коэффициент лавинного умножения М соответствует уровню Мопт. После этого переходят в рабочий режим. По команде от блока управления 10 передающий канал 1 излучает на цель серию K зондирующих импульсов. Одновременно блок управления запускает синхронизацию многоканальных накопителей 6 и 7, переключая их ячейки накопления с периодом τ (фиг. 2). Отраженные целью сигналы принимаются фотоприемным каналом 2, на выходе которого образуется смесь отраженного сигнала, флуктуационного шума и импульсов микроплазм. С выходов порогового устройства 4 сигналы поступают поочередно в ячейки накопителя 6, соответствующие текущему каналу дальности, включаемому тактовым сигналом блока управления 10. Сигналы в накопителе 6 суммируются с весом, соответствующим превышенному порогу. Например, при двухуровневом преобразовании с симметричным положением порогов относительно нуля при пересечении шумовым выбросом верхнего порога вверх в накопитель заносится «+1», а при пересечении нижнего порога вниз заносится «-1». При таком построении аппаратуры обеспечивается выигрыш Е в улучшении отношения сигнал/шум, близкий к теоретическому пределу  где K - количество циклов (объем) накопления [2]. В накопителе 7 содержится информация о количестве микроплазм в каждом канале дальности. Решающее устройство 8 вычисляет разность накопленных сумм ΔΣj=Σj-ΣMj, компенсируя наличие микроплазм.
где K - количество циклов (объем) накопления [2]. В накопителе 7 содержится информация о количестве микроплазм в каждом канале дальности. Решающее устройство 8 вычисляет разность накопленных сумм ΔΣj=Σj-ΣMj, компенсируя наличие микроплазм.
Пропуск сигнала вследствие маскировки шумом, характеризуемый вероятностью Qш, и пропуск сигнала вследствие блокировки микроплазмы, характеризуемое вероятностью QM, представляют собой взаимно независимые события [3], поэтому заданную вероятность пропуска сигнала Q=1-D за одно измерение можно представить в виде суммы Q=Qш+QM, где D - вероятность правильного обнаружения сигнала.
При выборе условий:

и

можно практически полностью устранить влияние микроплазм на обнаружительные характеристики.
Условие (8) равносильно соотношению:

где m - допустимое количество микроплазм в одном канале дальности за время накопления;
Kпор - пороговое значение накопленной суммы в одном канале, при котором принимается решение о наличии сигнала;
 обеспечивающий условие (7).
обеспечивающий условие (7).
Накопленная сумма K является случайной величиной с математическим ожиданием, соответствующим уровню принимаемого сигнала и при пороговом значении этой величины K=Kпор со среднеквадратическим отклонением  .
.
Критическое количество микроплазм в одном канале накопления m не должно существенно влиять на статистику накопленной суммы, обусловленной сигналом, что отмечается выражением (9).
Пример 1.
Объем накопления K=200; среднее значение накопленной суммы в отсутствие сигнала Kcp(0)=0; установленный порог  ; количество каналов накопления N=104; ширина канала τ=10-8 с; коэффициент
; количество каналов накопления N=104; ширина канала τ=10-8 с; коэффициент 
При этих условиях среднее количество микроплазм на канал за время накопления:

Среднее количество микроплазм на канал дальности за один цикл:

Длительность цикла накопления Т=Nτ=104⋅10-8=10-4 с.
Допустимая частота микроплазм

Вероятность появления микроплазмы в одном канале в двух циклах подряд - W2=m12.
При указанных ограничениях такое событие означает, что с большой вероятностью имеет место сигнал большой амплитуды. Поэтому принимают решение о приеме сигнала в данном канале дальности и останавливают процесс накопления.
Пример 2.
В условиях предыдущего примера вероятность W2=m12=4⋅10-6. При этом вероятность двух подряд микроплазм в любом канале дальности W2N=W2⋅N=4⋅10-2. В существующей практике пропуск сигнала с такой вероятностью считается допустимым.
Таким образом, обеспечивается задача изобретения - достижение теоретически предельной чувствительности во всех условиях эксплуатации независимо от микроплазменных пробоев, следующих с частотой до 200 кГц.
Предлагаемый способ некогерентного накопления сигналов обеспечивает максимальную вероятность обнаружения сигналов при минимальном объеме аппаратуры и может быть реализован в портативных лазерных дальномерах.
Источники информации
1 Я.Д. Ширман, В.Н. Голиков «Основы теории обнаружения радиолокационных сигналов и измерения их параметров». Изд. «Советское радио», М, 1963 г., с. 179.
2 Я.Д. Ширман, В.Н. Манжос «Теория и техника обработки радиолокационной информации на фоне помех». Изд. «Радио и связь», М., 1981 г., с. 81-83.
3 В.Е. Гмурман «Теория вероятностей и математическая статистика». Изд. «Высшая школа», М., 1977 г., 479 с.
4 В.Г. Вильнер Проектирование пороговых устройств с шумовой стабилизацией порога. Оптико-механическая промышленность, 1984 г., №5.
5 Патент WO 2005/006016 Al "Laser rangefinder and method thereof.
6 Патент РФ №2359226 по з-ке №2007137271 от 10.10.2007. «Способ некогерентного накопления светолокационных сигналов». - Прототип.
7 Тихонов В. И. Выбросы случайных процессов. Изд. «Наука», М, 1970 г., 392 с.
8 Филачев A.M., Таубкин И.И., Тришенков М.А. Твердотельная фотоэлектроника. Физические основы. Москва, Физматгиз. 2007.
9 Вишневский А.И., Руденко В.С, Платонов А. П. Силовые ионные и полупроводниковые приборы. Учебное пособие для вузов. Под ред. В.С. Руденко. Москва, Высшая школа, 1975.
10 Шашкина А.С. и др. Лавинный пробой p-n-перехода в задачах радиотехники. - Научно-технический вестник информационных технологий, механики и оптики, 2016, том 16, №5, с. 864-871.
11 Вильнер В. Г. и др. Оценка возможностей светолокационного импульсного измерителя дальности с накоплением. Фотоника, 2007, №6, с. 22-27.
12 Патент РФ №2390724. «Способ светолокационного определения дальности методом некогерентного накопления».
13 Патент РФ №2469269. «Способ определения дальности».
14 Патент РФ №2755603. «Способ порогового обнаружения оптических сигналов».
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ импульсного локационного измерения дальности | 2022 |
|
RU2792086C1 |
| Способ некогерентного накопления светолокационных сигналов | 2022 |
|
RU2788940C1 |
| Способ порогового обнаружения оптических сигналов | 2020 |
|
RU2755602C1 |
| Способ порогового обнаружения оптических сигналов | 2021 |
|
RU2778629C1 |
| Лазерный импульсный дальномер | 2022 |
|
RU2791186C1 |
| Способ обнаружения импульсных оптических сигналов | 2023 |
|
RU2810708C1 |
| Способ порогового обнаружения оптических сигналов | 2023 |
|
RU2797660C1 |
| Способ обнаружения оптических сигналов | 2020 |
|
RU2755601C1 |
| Способ приема оптических сигналов | 2021 |
|
RU2778047C1 |
| Способ приема импульсных оптических сигналов | 2021 |
|
RU2778048C1 |
Изобретение относится к приему оптических сигналов, в частности к технике приема сигналов посредством лавинных фотодиодов. Сущность заявленного способа некогерентного накопления импульсных светолокационных сигналов состоит в следующем. В каждом K-м цикле зондирования осуществляют прием отраженного сигнала в N каналах дальности, в которых проводится сравнение принятого сигнала с одним или несколькими аналоговыми пороговыми уровнями, а также накопление суммы превышений этих уровней с учетом весового коэффициента уровня. Наличие сигнала в конкретном канале детектируется путем сравнения суммы превышений с пороговым числом. Затем осуществляют приём отраженных сигналов посредством лавинного фотодиода, в подготовительном режиме в отсутствие зондирующих лазерных импульсов устанавливают для рабочего режима оптимальный коэффициент лавинного умножения Мопт фотодиода, при котором отношение сигнал/шум максимально. Далее в режиме Мопт выявляют наличие импульсов микроплазм и определяют минимальную амплитуду импульсов микроплазм UMmin, устанавливают дополнительный пороговый уровень UM, после чего переходят в рабочий режим накопления сигнала, при котором в каждом j-м канале дальности накапливают взвешенные суммы Σj превышений рабочих порогов. При этом параллельно в каждом j-м канале дальности накапливают суммы ΣMj превышений уровня UM. По окончании серии циклов зондирования в каждом канале дальности вычисляют разностные величины ΔΣj=Σj-EMj. В том случае, если ΔΣj превышает установленное пороговое число, то принимают решение о наличии сигнала в данном канале дальности и по номеру этого канала дальности судят о дальности до цели. Технический результат предлагаемого способа заключается в обеспечении максимальной вероятности обнаружения светолокационных сигналов методом накопления независимо от возникающих при лавинном умножении сигнала в фотодиоде микроплазм. 3 з.п. ф-лы, 3 ил.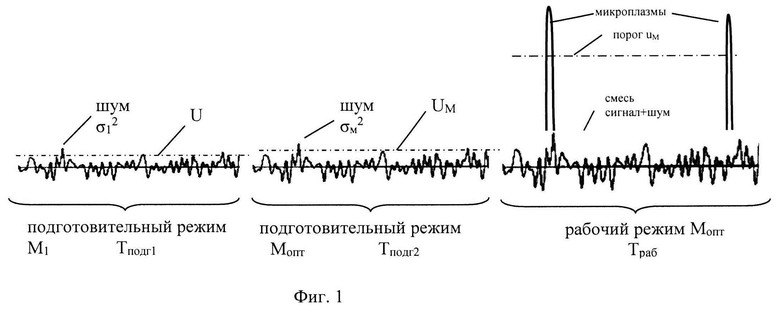
1. Способ некогерентного накопления импульсных светолокационных сигналов, включающий K циклов зондирования цели лазерными импульсами, в каждом цикле зондирования прием отраженного сигнала в N каналах дальности, где N=Rmax/ΔR, Rmax - диапазон измеряемых дальностей, ΔR=с τ/2, с - скорость света, τ - тактовый период измерителя задержки отраженного сигнала, в каждом канале дальности сравнение принятого сигнала с одним или несколькими аналоговыми пороговыми уровнями, накопление суммы превышений аналоговых пороговых уровней с учетом весового коэффициента уровня, по которой судят о наличии сигнала в этом канале путем сравнения суммы превышений с пороговым числом, отличающийся тем, что принимают отраженные сигналы с помощью лавинного фотодиода, в подготовительном режиме в отсутствие зондирующих лазерных импульсов устанавливают для рабочего режима оптимальный коэффициент лавинного умножения Мопт фотодиода, при котором отношение сигнал/шум максимально, в режиме Мопт выявляют наличие импульсов микроплазм и определяют минимальную амплитуду импульсов микроплазм UMmin, устанавливают дополнительный пороговый уровень UM в пределах Ucmax<UM<UMmin, где Ucmax - максимальная ожидаемая амплитуда сигнала, после чего переходят в рабочий режим накопления сигнала, в каждом j-м канале дальности накапливают взвешенные суммы Σj превышений рабочих порогов, параллельно в каждом j-м канале дальности накапливают суммы ΣMj превышений уровня UM, по окончании серии циклов зондирования в каждом канале дальности вычисляют разностные величины ΔΣj=Σj-ΣMj, и если ΔΣj превышает заранее установленное пороговое число, то принимают решение о наличии сигнала в данном канале дальности и по номеру этого канала дальности судят о дальности до цели.
2. Способ по п. 1, отличающийся тем, что оптимальный режим Mopt устанавливают, включая безлавинный режим смещения фотодиода М=1, затем устанавливают порог срабатывания U на уровне, соответствующем частоте шумовых срабатываний порогового устройства f<<f0, где f0 - частота пересечения шумом нулевого уровня, после этого увеличивают порог в  раз, где α - параметр шум-фактора лавинного умножения F=Мα, порог
раз, где α - параметр шум-фактора лавинного умножения F=Мα, порог  фиксируют и с помощью напряжения смещения фотодиода устанавливают такой коэффициент лавинного умножения М=Мопт, при котором частота fM шумовых превышений порога UM становится равной частоте f в безлавинном режиме М=1 при пороге U, по достижении частоты fM=f фиксируют достигнутый коэффициент лавинного умножения М=Мопт и включают рабочий режим приема сигналов.
фиксируют и с помощью напряжения смещения фотодиода устанавливают такой коэффициент лавинного умножения М=Мопт, при котором частота fM шумовых превышений порога UM становится равной частоте f в безлавинном режиме М=1 при пороге U, по достижении частоты fM=f фиксируют достигнутый коэффициент лавинного умножения М=Мопт и включают рабочий режим приема сигналов.
3. Способ по п. 1, отличающийся тем, что если амплитуда сигнала в рабочем режиме превышает максимальный из пороговых уровней Umax, то уменьшают коэффициент лавинного умножения до уровня 1≤М<Мопт, при котором нелинейные искажения сигнала минимальны.
4. Способ по п. 1, отличающийся тем, что если в каком-либо из каналов дальности регистрируется сигнал в двух циклах накопления подряд, то принимают решение о наличии цели в данном канале и прекращают накопление, при этом вероятность появления двух подряд микроплазм в любом канале дальности не должна превышать величины W2N=W2⋅N<(1-D), где W2 - вероятность двух подряд микроплазм в одном канале дальности; N - число каналов дальности; D - заданная вероятность правильного обнаружения сигнала.
| СПОСОБ НЕКОГЕРЕНТНОГО НАКОПЛЕНИЯ СВЕТОЛОКАЦИОННЫХ СИГНАЛОВ | 2007 |
|
RU2359226C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЙ ДО ОБЪЕКТА | 2017 |
|
RU2653558C9 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2014 |
|
RU2560011C1 |
| US 0007499829 B2, 03.03.2009 | |||
| US 0007184130 B1, 27.02.2007. | |||

