Предлагаемое изобретение относится к лазерной технике, в частности, к технике импульсной лазерной локации, и может быть использовано в дальнометрии, пеленгации, связи и других фотоэлектронных приложениях.
Известен способ импульсного локационного измерения дальности до цели, включающий посылку к цели зондирующего светового импульса, прием отраженного целью излучения, пороговой обработки принятого сигнала, измерение временного интервала Т между моментами излучения зондирующего импульса и приема превысившего порог Uпop отраженного сигнала Us с последующим определением дальности R по формуле R = сТ/2, где с - скорость света, [1]. Известны также способы приема отраженного излучения с помощью лавинных фотодиодов [2, 3].
Наиболее близким к предлагаемому техническому решению является способ импульсного локационного измерения дальности до цели, включающий посылку к цели зондирующего светового импульса, прием отраженного целью излучения с помощью лавинного фотодиода, пороговую обработку принятого сигнала, измерение временного интервала Т между моментами излучения зондирующего импульса и приема превысившего порог Uпop отраженного сигнала Us с последующим определением дальности R по формуле R = сТ/2, где с - скорость света, [4]. В этом случае обеспечивается максимальная чувствительность, однако такой прием сопровождается импульсными помехами, сопровождающими процесс лавинного усиления и вызывающими ошибки измерения дальности [5].
Изобретение [4] решает проблему ложных выбросов [5] путем регулирования напряжения смещения фотодиода, поддерживая его на уровне, при котором частота ложных выбросов не превышает допустимого уровня.
Режим микроплазменного пробоя фотодиода, при котором возникают ложные импульсы, характеризуется следующими особенностями. Микроплазменные импульсы тока имеют прямоугольную форму и постоянную амплитуду, которая возрастает по мере увеличения обратного напряжения. Увеличение амплитуды сопровождается увеличением длительности импульсов и уменьшением скважности. В таком режиме шум лавинного фотодиода состоит из двух независимых составляющих - нормального шума и «телеграфного» шума микроплазм [5-7]. Микроплазменная составляющая шума фотодиода не сопоставима по статистическим характеристикам с нормальной составляющей, и ее участие в процессе регулирования смещения фотодиода непредсказуемо. При некоторых температурных условиях регулировка лавинного режима по частоте шумовых выбросов фотодиода, включая микроплазмы, может привести к выходу системы на неоптимальный режим лавинного умножения, т.е. к ухудшению пороговой чувствительности фотоприемного устройства или к недопустимой вероятности ложных срабатываний, вызванных микроплазмами. Это приводит к снижению максимальной измеряемой дальности.
Задачей изобретения является достижение наилучших обнаружительных характеристик во всех условиях эксплуатации при наличии микроплазм и нормального шума.
Указанная задача решается за счет того, что в известном способе импульсного локационного измерения дальности до цели, включающем посылку к цели зондирующего светового импульса, прием отраженного целью излучения с помощью лавинного фотодиода, пороговую обработку принятого сигнала, измерение временного интервала Т между моментами излучения зондирующего импульса и приема превысившего порог Uпop отраженного сигнала Us с последующим определением дальности R по формуле R = сТ/2, где с - скорость света, устанавливают оптимальный по отношению сигнал/шум лавинный режим фотодиода, определяют минимальное Umin и максимальное Umax значения диапазона амплитуд микроплазменных импульсов, возникающих в процессе лавинного умножения в фотодиоде, определяют амплитуду Usmax отраженного сигнала, производят его пороговую обработку, если Usmax<Umin или Usmax>Umax и запрещают обработку сигнала Us, если Umin<Usmax<Umax, причем, в процессе подготовки к пороговой обработке сигнала определяют частоту f превышений порога шумовыми выбросами и устанавливают ее так, чтобы в рабочем режиме за время измерения Тизм она не превышала предельного значения fmax=WM/Тизм, где WM = (W - WN) - предельно допустимая вероятность пропуска сигнала, обусловленного запретом приема при наличии микроплазм; W = (1 - D) - вероятность пропуска; D - вероятность правильного обнаружения; WN - предельно допустимая вероятность пропуска сигнала, обусловленного шумом.
Частоту f определяют путем подсчета количества N превышения порога выбросами шума за время Т и вычисляют частоту по формуле f = N/T.
Частоту f можно устанавливать в режиме шумовой автоматической регулировки, при этом период Ту усреднения частоты шумовых превышений порога U выбирают из условия минимального времени выхода на рабочий режим при заданном предельном разбросе установившихся значений порога U.
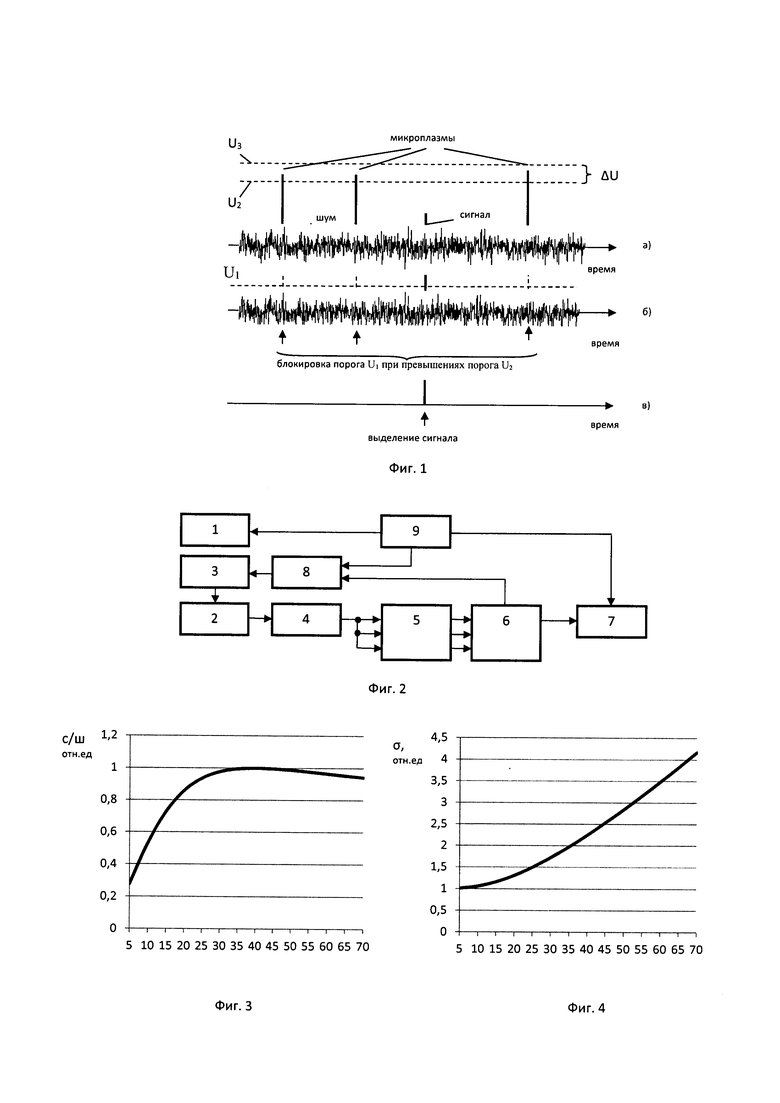
На фиг.1 а), б) в) приведены эпюры обработки смеси сигнал + шум на разных стадиях процесса. На фиг.2 представлена схема аппаратной реализации способа. На фиг.3 и фиг.4 приведены графики нормированных зависимостей отношения сигнал/шум и среднеквадратического значения шума от коэффициента лавинного умножения.
Принципиальная особенность предлагаемого технического решения, позволяющая решить поставленную задачу, заключается в аппаратной «переквалификации» импульсов помех из фактора ложных тревог в фактор пропуска сигнала с учетом того, что требуемое ограничение на вероятность ложной тревоги F на несколько порядков более жестко, чем на вероятность пропуска W = 1 - D, где D - вероятность правильного обнаружения.
Этот принцип осуществляется следующим образом.
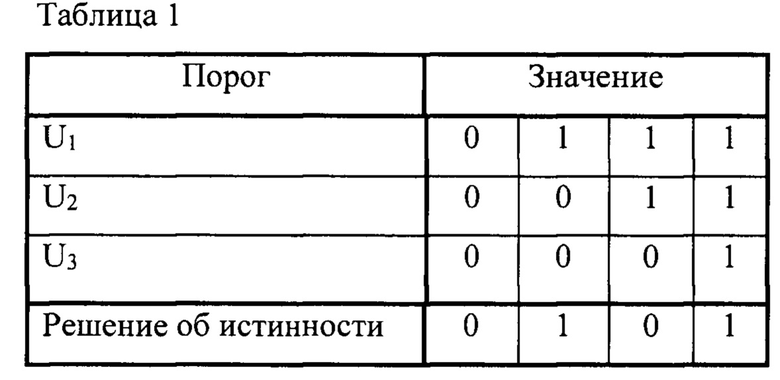
Пороговую обработку смеси сигнал шум производят на трех пороговых уровнях (фиг.1). Уровень U1 определяется задачей оптимального обнаружения сигнала на фоне нормального шума фотоприемного тракта [11]. Два дополнительных пороговых уровня U2 и U3 соответствуют нижней и верхней границам амплитудного диапазона микроплазм [5], определяемым перед измерениями при напряжении смещения фотодиода, соответствующем максимальному отношению сигнал/шум [12]. При превышении выбросом шума второго порогового уровня и не превышении третьего принимают решение, что данный выброс обусловлен микроплазмой и блокируют его обработку. Если выброс превышает порог U1, но не превышает U2, его считают принадлежащим сигналу. Аналогичное решение принимают, если выброс превысил порог U3. При такой методике обработки смеси сигнала с шумом импульсы микроплазм подавляются полностью, а сигнальные импульсы обнаруживаются обычным образом, за исключением тех, амплитуда которых попала в промежуток ΔU между порогами U2 и U3. Следовательно, вероятность правильного обнаружения D уменьшится за счет пропуска таких сигналов с вероятностью WM, а также за счет тех сигналов, которые совпали по времени с импульсами микроплазм с вероятностью Wt. В последнем случае будут признаны сигнальными те импульсы, суммарная амплитуда Us которых с амплитудой микроплазм UM превышают порог U3. То есть условная вероятность пропуска в ситуации совпадения сигнала с микроплазмой определяется появлением микроплазмы в позиции сигнала при одновременном условии Us+UM<U3.
События Us+UM<U3 и ts=tM независимы, таким образом, вероятность пропуска сигнала W складывается из вероятностей 
где  - знак условной вероятности;
- знак условной вероятности;
ts и tM - соответственно временное положение сигнала и микроплазмы.
Вероятности (1) - (3) зависят от числа K разрешаемых элементов дальности. Так, при диапазоне измеряемых дальностей Rmax = 10000 м и элементе разрешения дальности ΔR = 1 м количество разрешаемых элементов K = Rmax/ΔR=104.
Пример 1.
Вероятность правильного обнаружения (ВПО) D = 0,9; W = 1 - D = 0,1. Вероятность ложной тревоги F = 10-4. Количество разрешаемых элементов K = 104.
Вероятность ложной тревоги (ВЛТ) в одном разрешаемом элементе Fi=F/K=10-8.
Отношение первого порога U1 к среднеквадратическому значению шума с определяют с помощью интеграла вероятности [10]. Для указанной ВЛТ - U1/σ ~ 5,17.
Для D = 0,9 отношение сигнал/порог должно быть Us/U=1,28.
При этом отношение сигнал/шум должно быть не менее Us/σ=1,28⋅5,17=6,618.
При подавлении импульсов микроплазм согласно предлагаемому способу вероятность ложных тревог не ухудшается; наоборот, она снижается за счет блокирования части элементов дальности с микроплазмами.
Вероятность пропуска сигнала WM=P(U2<Us<U3) можно оценить, сопоставив диапазон (U2 … U3) с полным диапазоном отраженных сигналов P(Rmin) … P(Rmax)Ka, где Rmin и Rmax - минимальная и максимальная измеряемая дальность, Ka - коэффициент ослабления сигнала в атмосфере. При условии видимости цели Ka=5-8. Отношение сигналов ΘR в указанном диапазоне дальностей пропорционально квадрату дальностей [13]:

Отношение уровней ΘU=U3/U2=1,1…1,5 [5-7].
Вероятность попадания сигнала в амплитудный интервал U2 … U3 (фиг.1)

Пример 2.
Rmin = 0,2 км; Rmax = 20 км; при условии видимости цели Ka=5-8 максимальная вероятность WM равна

Вероятность Wt определяется из тех же соображений и не превышает WM.
Из примера 2 следует, что
W ~ WN, to есть ухудшения вероятности правильного обнаружения в результате применения данного способа практически не происходит.
Это означает, что в процессе приема сигналов допускается высокая частота микроплазм, не препятствующих работе фотодиода в режиме лавинного умножения Мопт, обеспечивающего максимальное отношение сигнал/шум.
Оптимальное значение коэффициента лавинного умножения М можно определить следующим образом.
На выходе лавинного фотодиода действует эквивалентный квадрат шумового тока:

где  - квадрат неумножаемого шумового тока;
- квадрат неумножаемого шумового тока;

 - заряд электрона;
- заряд электрона;
 - первичный обратный ток фотодиода;
- первичный обратный ток фотодиода;
 - полоса пропускания приемного тракта до входа порогового устройства;
- полоса пропускания приемного тракта до входа порогового устройства;
 - коэффициент лавинного умножения;
- коэффициент лавинного умножения;
 - шум-фактор лавинного умножения;
- шум-фактор лавинного умножения;
 - коэффициент, определяемый материалом фотодиода [12].
- коэффициент, определяемый материалом фотодиода [12].
Квадрат W отношения шум/сигнал

где 

Условие нуля производной

или
откуда 

Поддержание оптимального режима лавинного умножения возможно, например, с помощью способа [12].
Максимально допустимая частота микроплазменных пробоев определяется следующим образом. Положение сигнала фиксировано в i-м элементе дальности. Микроплазменный импульс может привести к потере сигнала, если он находится в этом же канале дальности (дискрете), причем, как показано, вероятность пропуска сигнала при этом очень невелика. В других дискретах микроплазмы не влияют на обнаружительные характеристики D и F, и частота микроплазм может быть сколь угодно велика и ограничивается, например, соображениями стойкости фотодиода или шумовым последействием микроплазм. При допустимой вероятности микроплазмы в одном дискрете W1 их количество KM = W1K, а допустимая частота микроплазм fM = KM/Т.
Пример 3.
Чувствительность приемного канала характеризуется отношениями порог/шум и сигнал/шум. Для безлавинного режима при заданных обнаружительных характеристик эти параметры приведены в примере 1.
Введение лавинного режима меняет соотношение между неумножаемой σ0 и умножаемой σ1 составляющими шума (6) - (8). Вследствие влияния параметра α умножаемая составляющая растет быстрее, чем ограничивается величина коэффициента лавинного умножения величиной Мопт, при котором отношение сигнал/шум максимально.
Пример 4.

Для этих параметров приведены нормированные зависимости отношения сигнал/шум (фиг.3) и порог/шум (фиг.4). Из этих результатов видно, что Мопт=40, а порог увеличивается в 2,2 раза относительно безлавинного режима (пример 1). Следовательно, выигрыш в отношении сигнал/шум при оптимальном значении М составляет 40/2,2=18 раз.
Если микроплазменные пробои начинаются при М=20, то известные технические решения фиксируют лавинный режим на таком уровне и, как видно из фиг.3, вносят, тем самым, потери 15%. Предлагаемое решение свободно от этого недостатка. Из фиг.3 видно также, что правее оптимума существует пологое плато, что позволяет устанавливать М в довольно широких пределах без снижения обнаружительных характеристик, в том числе, из-за микроплазм.
Реализующий способ дальномер (фиг.2) содержит лазер 1, лавинный фотодиод 2 с источником смещения 3, включенный последовательно с фотодиодом усилитель 4, нагруженный на трехуровневое пороговое устройство 5, выходы которого подключены ко входам решающего устройства 6. Выход последнего подключен к вычислителю дальности 7. Источник смещения фотодиода снабжен схемой автоматического регулирования (САР) 8, связанной с решающим устройством. Лазер 1, САР 8 и вычислитель дальности 7 связаны с блоком управления 9.
По команде с блока управления 9 лазер 1 излучает в сторону цели зондирующий импульс. Отраженное целью излучение принимает приемно-усилительный тракт в составе лавинного фотодиода 2 и усилителя 4. Лавинный режим фотодиода поддерживается схемой автоматического регулирования 8, реализующей наилучшую чувствительность приемного тракта (6), например, с помощью [4, 12]. Необходимые для работы САР 8 управляющие сигналы поступают на нее с блока управления 9 и решающего устройства 6.
Трехуровневое пороговое устройство 6 на своих выходах формирует стандартные импульсы при превышении входным воздействием установленных пороговых уровней -U1; U1 и U2; U1 и U2 и U3. В соответствии с описанной выше логикой решающее устройство 6 принимает решение о квалификации этих событий как истинных или ложных.
Решение о наличии цели в соответствующем канале дальности решающее устройство передает в вычислитель дальности, который по задержке Т = jτ этого импульса относительно зондирующего импульса вычисляет дальность до цели R = сТ/2, где j - номер канала дальности;
τ - временная ширина канала дальности;
с - скорость света.
Таким образом, обеспечивается задача изобретения - достижение наилучших обнаружительных характеристик во всех условиях эксплуатации при наличии микроплазм и нормального шума.
Источники информации
1 Волохатюк В.А., Кочетков В.М., Красовский P.P. Под ред. P.P. Красовского. Вопросы оптической локации. - «Советское радио», М., 1971 г.
2 Лебедько Е.Г. Системы импульсной оптической локации. - «Лань», СПб., 2014 г.
3 Патент РФ №2551700. Лазерный импульсный дальномер. 2015 г.
4 US pat. 4077718. Receiver for optical radar. 1978. - Прототип.
5 Филачев A.M., Таубкин И.И., Тришенков М.А. Твердотельная фотоэлектроника. Физические основы. Москва, Физматгиз. 2007, с. 345.
6 Вишневский А.И., Руденко В.С, Платонов А.П. Силовые ионные и полупроводниковые приборы. Учебное пособие для вузов. Под редакцией В.С. Руденко. Москва, Высшая школа, 1975.
7 Шашкина А.С. и др. Лавинный пробой p-n-перехода в задачах радиотехники - Научно-технический вестник информационных технологий, механики и оптики, 2016, том 16, №5, с. 864-871.
8 Вильнер В.Г. Проектирование пороговых устройств с шумовой стабилизацией порога. - Оптико-механическая промышленность, 1984, №5, с. 39-41.
9 Патент РФ №2718856. Способ автоматической стабилизации частоты пересечения порогового уровня выбросами шумового процесса, 2020 г.
10 Гмурман В.Е. Теория вероятностей и математическая статистика. Москва, Высшая школа, 1977, - с. 480.
11 Вильнер В.Г. и др. Оценка возможностей светолокационного измерителя дальности с накоплением. Фотоника, 2007, №6, - с. 22-26.
12 Пат. РФ №2755601. Способ обнаружения оптических сигналов. 2020 г.
13 Вильнер В.Г. и др. Достоверность измерений импульсного лазерного дальномера. Фотоника, 2013, №3, - с. 42-60.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ некогерентного накопления импульсных светолокационных сигналов | 2022 |
|
RU2791151C1 |
| Способ некогерентного накопления светолокационных сигналов | 2022 |
|
RU2788940C1 |
| Лазерный импульсный дальномер | 2022 |
|
RU2791186C1 |
| Способ порогового обнаружения оптических сигналов | 2021 |
|
RU2778629C1 |
| Способ стабилизации лавинного режима фотодиода | 2021 |
|
RU2778045C1 |
| Способ стабилизации режима лавинного фотодиода | 2021 |
|
RU2778976C1 |
| Способ приема импульсных оптических сигналов | 2021 |
|
RU2778048C1 |
| Способ приема оптических сигналов | 2021 |
|
RU2778047C1 |
| Способ приема оптических импульсов | 2021 |
|
RU2778046C1 |
| Способ накопления светолокационных сигналов | 2023 |
|
RU2810710C1 |
Изобретение относится к технике измерения дальности, в частности к приему оптических сигналов с помощью лавинных фотодиодов, и может быть использовано в локации, связи и других фотоэлектронных системах. Техническим результатом является достижение предельной чувствительности во всех условиях эксплуатации с учетом микроплазменных пробоев и нормального шума при минимальном времени выхода на оптимальный лавинный режим. Заявленный способ включает посылку к цели зондирующего светового импульса, прием отраженного целью излучения с помощью лавинного фотодиода, пороговую обработку принятого сигнала, измерение временного интервала Т между моментами излучения зондирующего импульса и приема превысившего порог Uпop отраженного сигнала Us с последующим определением дальности R. При этом устанавливают оптимальный по отношению сигнал/шум лавинный режим фотодиода, определяют минимальное Umin и максимальное Umax значения диапазона амплитуд микроплазменных импульсов, возникающих в процессе лавинного умножения в фотодиоде, определяют амплитуду Usmax отраженного сигнала, производят его пороговую обработку выше максимального и ниже минимального значений диапазона амплитуд микроплазменных импульсов. Причем частоту f превышений порога шумовыми выбросами определяют путем подсчета количества N превышения порога выбросами шума за время Т и вычисляют частоту по формуле f = N/T, и устанавливают так, чтобы в рабочем режиме за время измерения Тизм она не превышала предельного значения fmax = WM/Тизм, где WM = (W - WN) - предельно допустимая вероятность пропуска сигнала, обусловленного запретом приема при наличии микроплазм; W = (1 - D) - вероятность пропуска; D - вероятность правильного обнаружения; WN - предельно допустимая вероятность пропуска сигнала, обусловленного шумом. 2 з.п. ф-лы, 4 ил., 1 табл., 4 пр. 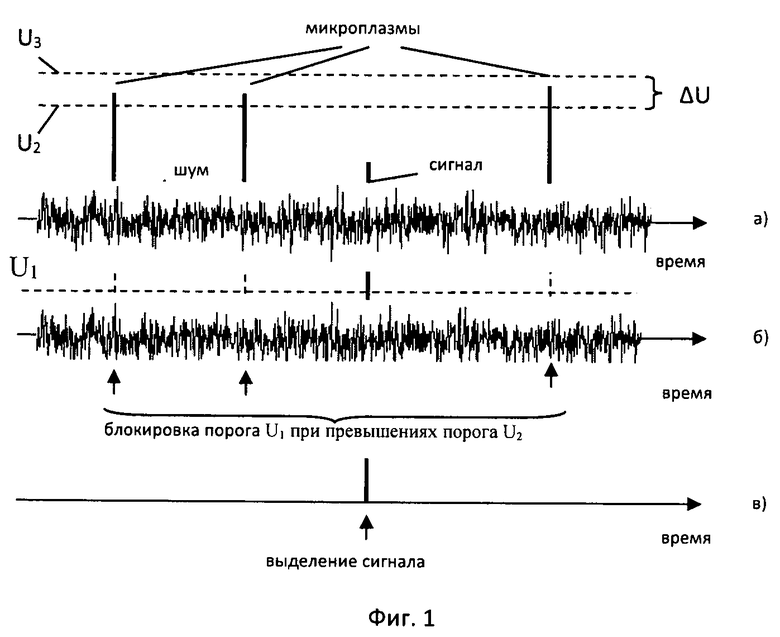
1. Способ импульсного локационного измерения дальности до цели, включающий посылку к цели зондирующего светового импульса, прием отраженного целью излучения с помощью лавинного фотодиода, пороговую обработку принятого сигнала, измерение временного интервала Т между моментами излучения зондирующего импульса и приема превысившего порог Uпop отраженного сигнала Us с последующим определением дальности R по формуле R = сТ/2, где с - скорость света, отличающийся тем, что устанавливают оптимальный по отношению сигнал/шум лавинный режим фотодиода, определяют минимальное Umin и максимальное Umax значения диапазона амплитуд микроплазменных импульсов, возникающих в процессе лавинного умножения в фотодиоде, определяют амплитуду Usmax отраженного сигнала, производят его пороговую обработку, если Usmax < Umin или Usmax > Umax, и запрещают обработку сигнала Us, если Umin < Usmax < Umax, причем в процессе подготовки к пороговой обработке сигнала определяют частоту f превышений порога шумовыми выбросами и устанавливают ее так, чтобы в рабочем режиме за время измерения Тизм она не превышала предельного значения fmax = WM/Тизм, где WM = (W - WN) - предельно допустимая вероятность пропуска сигнала, обусловленного запретом приема при наличии микроплазм; W = (1 - D) - вероятность пропуска; D - вероятность правильного обнаружения; WN - предельно допустимая вероятность пропуска сигнала, обусловленного шумом.
2. Способ по п. 1, отличающийся тем, что частоту f определяют путем подсчета количества N превышения порога выбросами шума за время Т и вычисляют частоту по формуле f= N /T.
3. Способ по п. 1, отличающийся тем, что частоту f устанавливают в режиме шумовой автоматической регулировки, при этом период Ту усреднения частоты шумовых превышений порога U выбирают из условия минимального времени выхода на рабочий режим при заданном предельном разбросе установившихся значений порога U.
| ВИЛЬНЕР В., ЛАРЮШИН А., РУДЬ Е | |||
| Оценка возможностей светолокационного импульсного измерителя дальности с накоплением // Журнал "Фотоника", 2007, N 6, сс.22-26 | |||
| Способ обнаружения оптических сигналов | 2020 |
|
RU2755601C1 |
| Способ приема импульсных оптических сигналов | 2020 |
|
RU2750444C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТА НА МАЛЫХ ДИСТАНЦИЯХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2549210C2 |
| ЛАЗЕРНЫЙ ИМПУЛЬСНЫЙ ДАЛЬНОМЕР | 2014 |
|
RU2551700C1 |
| US 4077718 A, 07.03.1978 | |||
| US 4236069 A, 25.11.1980 | |||
| DE 102016113131 A1, | |||

