Область техники, к которой относится изобретение
Изобретение относится к летательным аппаратам с машущими крыльями типа орнитоптера.
Уровень техники, к которому относится изобретение
Известны летательные аппараты, оборудованные двумя машущими крыльями. Для приведения в действие этих крыльев были предложены различные механизмы. Многие из них основаны на применении кривошипно-шатунного механизма, приводимого в действие электрическим двигателем. Для изменения частоты махового движения достаточно изменить скорость вращения электрического двигателя. Однако эти системы не позволяют изменять амплитуду махового движения, если только не снабдить их дополнительным приводом.
Задачей изобретения является создание очень простого устройства для приведения в движение крыльев, позволяющего регулировать одновременно частоту и амплитуду маховых движений крыльев.
Раскрытие изобретения
Поставленная задача решена в летательном аппарате с машущими крыльями, содержащем раму, с установленными на ней двумя поворотными шарнирами, выполненными с возможностью поворота вокруг двух параллельных шарнирных осей, при этом на каждом из поворотных шарниров установлено крыло. Согласно изобретению, летательный аппарат содержит первый генератор колебаний для передачи колебаний на поворотные шарниры с целью создания махового движения крыльев, при этом первый генератор колебаний содержит:
- два рычага, неподвижно соединенные с каждым из поворотных шарниров;
- два кривошипа, каждый из которых шарнирно соединен с концом рычагов вокруг осей, параллельных шарнирным осям поворотных шарниров;
- шатун, шарнирно соединенный с концами двух кривошипов вокруг осей, параллельных шарнирным осям поворотных шарниров;
- средства синхронизации вращения двух поворотных шарниров таким образом, чтобы поворотные шарниры совершали одинаковые и противоположные по направлению вращения;
- два электрических двигателя, выполненные, каждый, с возможностью управления вращением одного из кривошипов, находящегося напротив соответствующего рычага;
- средства управления, предназначенные для управления и синхронизации скорости вращения двигателей и для управления смещением фазы между двигателями.
За счет непрерывного вращения двигателей с одинаковой скоростью обеспечивают чередующиеся маховые движения двух крыльев. Используя смещение фазы между двумя двигателями, регулируют амплитуду махового движения. Можно также добиться прекращения махового движения, совместив фазу двигателей, то есть создать ситуацию, когда кривошипы остаются параллельными относительно друг друга.
Таким образом, при помощи двух легко контролируемых параметров (общая скорость и сдвиг фазы двигателей) получают возможность управления частотой и амплитудой маховых движений крыльев.
Следует отметить, что скорость вращения может быть непостоянной. Вместе с тем, важно, чтобы двигатели оставались синхронизированными между собой, если только не ввести в систему дополнительную степень свободы.
Краткое описание чертежей
Изобретение будет более понятно из дальнейшего описания со ссылками на прилагаемые чертежи.
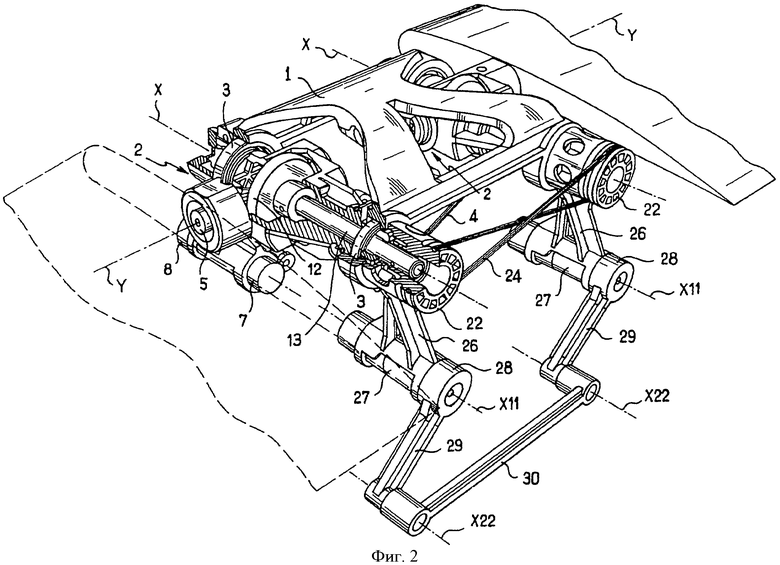
На фиг.1 показано устройство согласно частному варианту осуществления изобретения, вид в перспективе спереди в три четверти с частичным разрезом, при этом одно из крыльев показано пунктирной линией;
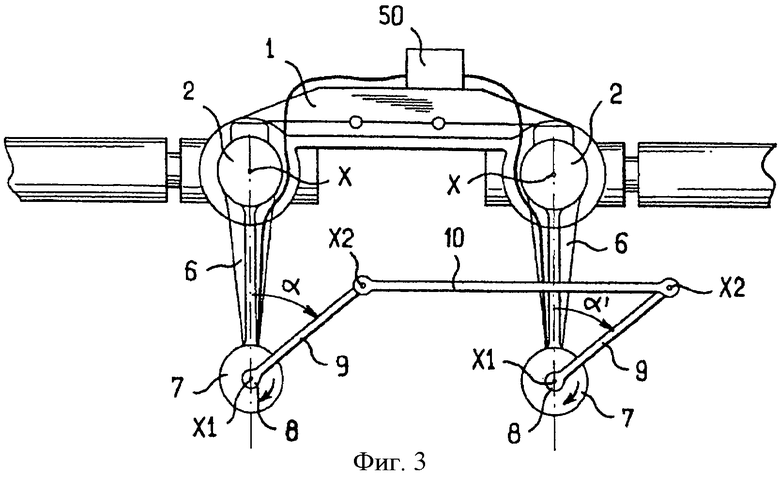
на фиг.2 - то же, вид в перспективе сзади в три четверти с частичным разрезом, при этом одно из крыльев показано пунктирной линией;
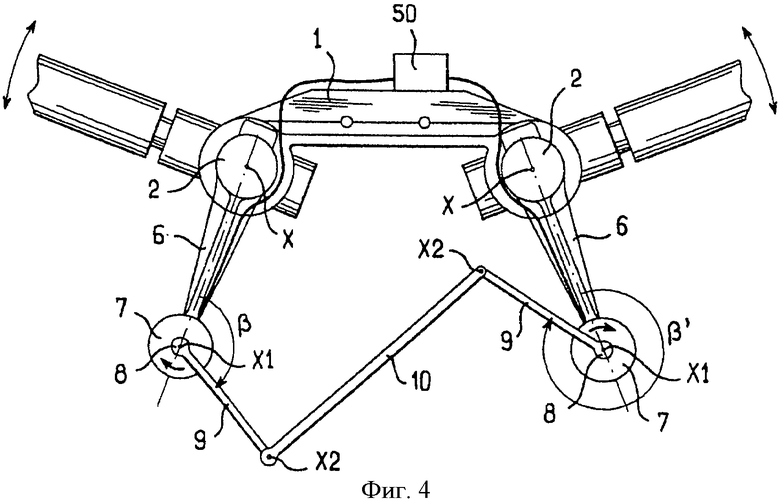
на фиг.3 - устройство, изображенное на фиг.1, при работе двигателей в одной фазе, вид спереди;
на фиг.4 - устройство, изображенное на фиг.1, при работе двигателей со смещением фазы, вид спереди.
Осуществление изобретения
Как показано на чертежах и согласно частному варианту осуществления изобретения, устройство содержит раму 1, на которой установлены две цапфы 2 с возможностью вращения относительно рамы вокруг параллельных осей X. В разрезе части рамы 1 показаны опорные подшипники 3 одной из цапф 2.
Каждая цапфа 2 несет поворотную опору 5, установленную в подшипнике с возможностью вращения вокруг оси Y, перпендикулярной оси Х (на фиг.1 показана только одна поворотная опора левого шарнира). Крыло соединено непосредственно с поворотной опорой 5 так, что его размах направлен по существу вдоль оси Y. Таким образом, качающееся колебание одной из цапф 2 вокруг оси Х приводит к маховому движению соответствующего крыла, тогда как колебание поворотной опоры 5 вокруг оси Y приводит к изменению угла атаки соответствующего крыла.
Далее описан первый генератор колебаний, управляющий маховым движением крыльев. Генератор колебаний содержит перекрещивающийся ремень 4, заходящий в желобки на цапфах 2 и обеспечивающий их угловую синхронизацию таким образом, что когда одна из цапф поворачивается на определенный угол, другая цапфа поворачивается на такой же угол, но в противоположном направлении. Как вариант, можно использовать зубчатое зацепление или любую другую пассивную механическую систему, позволяющую синхронизировать соответствующие поворотные движения двух цапф 2.
Первый генератор колебаний содержит рычаги 6, каждый из которых жестко соединен с соответствующей цапфой 2. Противоположный конец каждого из рычагов 6 удлинен для размещения в нем электродвигателя 7, конец 8 выходного вала которого имеет возможность вращения вокруг оси X1, параллельной оси X. В данном случае рычаги 6 направлены вниз по существу вертикально, когда оси Y направлены горизонтально, как показано, в частности, на фиг.3. На каждом конце 8 вала установлен кривошип 9. Концы кривошипов 9 соединены с шатуном 10 шарнирами, оси Х2 которых также параллельны осям X.
В данном случае длина рычагов 6 (измеренная между осями Х и X1) превышает длину кривошипов 9 (измеренную между осями X1 и Х2), а длина шатуна 10 (измеренная между двумя осями Х2) равна расстоянию между осями X.
Маховое движение крыльев получают следующим образом. Показанные на фиг.3 электрические двигатели 7 вращаются в одном направлении и с одинаковой скоростью. Кривошипы 9 параллельны между собой, поэтому углы α и α' в любой момент времени остаются равными. В этом случае говорят, что электрические двигатели 7 синфазны. Это движение не приводит к колебанию рычагов 6 и, следовательно, цапф 2. Крылья не совершают маховых движений.
На фиг.4 показано вращение электрических двигателей 7 с одинаковой скоростью, но со смещением по фазе. Один из кривошипов 9 смещен в угловом направлении относительно другого кривошипа. Углы β и β' не равны между собой. Непрерывное вращение электрических двигателей 7 в одинаковом направлении и с одинаковой скоростью вызывает колебание рычагов и, следовательно, цапф 2. Крылья совершают колебательные маховые движения вокруг осей X.
В данном случае каждый из электрических двигателей 7 содержит датчик углового положения и соединен с блоком управления 50, который подает питание на двигатели и получает данные от датчиков. Для изменения частоты махового движения блок управления 50 изменяет скорость вращения электрических двигателей 7, следя при этом, чтобы двигатели были синхронизированы и имели одинаковую скорость вращения. Для изменения амплитуды маховых движений блок управления 50 может менять сдвиг фазы между двумя электрическими двигателями 7, например, временно замедляя один из двигателей до получения необходимого сдвига фазы, затем ускоряя указанный двигатель, чтобы он вращался с такой же скоростью, что и другой двигатель.
Далее будет подробно описан второй генератор колебаний, позволяющий управлять углом атаки крыльев. Этот генератор колебаний работает на принципе, аналогичном первому генератору колебаний. Следует отметить, что каждое крыло соединено с соответствующей цапфой 2 не напрямую, а через поворотную опору 5, установленную в шарнире с возможностью вращения вокруг оси Y.
Как показано на фиг.1 и 2, каждая поворотная опора 5 содержит коническую шестерню 11, которая взаимодействует с конической шестерней 12, установленной на конце приводного вала 13, установленного в цапфе 2 с возможностью вращения вокруг оси X. Обе конические шестерни образуют угловую передачу, связывающую вращение поворотной опоры 5 вокруг оси Y с вращением соответствующего приводного вала 13 вокруг оси X. Другой конец каждого приводного вала 13 неподвижно соединен с муфтой 22. Муфты 22 синхронизированы во вращении при помощи перекрещивающегося ремня 24, так что поворот одного из приводных валов 13 в одном направлении приводит к повороту другого приводного вала 13 на тот же угол, но в противоположном направлении.
Каждая муфта 22 содержит рычаг 26, конец которого удлинен для размещения в нем электродвигателя 27. Конец 28 выходного вала электродвигателя 27 имеет возможность вращения вокруг оси X11, параллельной оси X. В данном случае рычаги 26 направлены вниз по существу вертикально, когда оси Y расположены горизонтально. На каждом конце 28 выходного вала электродвигателя 27 установлен кривошип 29. Концы кривошипов 9 соединены с шатуном 30 шарнирами, оси Х22 которых параллельны оси X.
В данном случае длина рычагов 26 (измеренная между осями Х и X11) превышает длину кривошипов 29 (измеренную между осями X11 и Х22), а длина шатуна 30 (измеренная между двумя осями Х22) равна расстоянию между осями X.
Второй генератор колебаний работает точно так же, как и первый. Когда электрические двигатели 27 работают синфазно, кривошипы 20 остаются параллельными между собой, поэтому приводные валы 13 не вращаются, и второй генератор колебаний не задает колебаний по углу атаки. Вместе с тем, следует отметить, что, если первый генератор колебаний включен для задания маховых колебаний, эти маховые колебания вызывают колебания по углу атаки крыльев. Действительно, учитывая связь между поворотной опорой 5 и приводным валом 13 через конические шестерни 11 и 12, вращение цапфы 2 вокруг оси Х приводит к вынужденному вращению поворотной опоры 5, даже если приводной вал 13 остается неподвижным. Таким образом, на крылья передается вынужденное колебание угла атаки с частотой, идентичной частоте маховых колебаний.
Если же электрические двигатели 27 работают со смещением по фазе, вращение кривошипов 29 приводит к управляемому колебанию рычагов 26 и, следовательно, муфт 24 и приводных валов 13. Это колебание передается через конические шестерни 11, 12 на поворотные опоры 5, которые колеблются в свою очередь, что приводит к управляемому колебанию угла атаки крыльев, которое добавляется к вынужденному колебанию угла атаки, связанному с колебанием цапф 2 вокруг осей X.
Блок управления 50 выполнен с возможностью управления двигателями 27 второго генератора колебаний таким же образом, как и для электрических двигателей 7. Скорость вращения двигателей 27 следует адаптировать таким образом, чтобы частота колебаний по углу атаки крыльев совпадала с частотой маховых колебаний крыльев.
Изобретение не ограничивается изложенным выше вариантом его осуществления, а охватывает любой вариант, не выходящий за рамки прилагаемой формулы изобретения.
В частности, хотя было представлено устройство, содержащее первый генератор колебаний для управления маховым движением крыльев и второй генератор колебаний для управления углом атаки, не выходя за рамки изобретения, можно создать устройство, оборудованное только одним генератором колебаний, управляющим маховым движением крыльев. В этом случае колебание угла атаки, связанное с колебанием маховых движений, получают, просто останавливая вращение приводных валов 13. В этом случае устройство становится более простым, даже если не позволяет регулировать колебание угла атаки по амплитуде и по частоте.
Если не требуется никакого колебания угла атаки, можно упростить устройство, исключив приводные валы 13 и поворотные опоры и соединив крылья напрямую с цапфами 2.
В приведенном примере двигатели установлены на конце рычагов, но можно разместить двигатели на раме и связать вращение кривошипов с вращением двигателей при помощи ременной передачи или любого другого известного средства передачи вращения. Так можно уменьшить инерцию вращения вокруг осей Х цапф или муфт.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ МАШУЩИХ КРЫЛЬЕВ МАХОЛЕТА И МАХОЛЕТ | 2010 |
|
RU2450954C1 |
| УПРУГО ИЗГИБАЮЩЕЕСЯ КРЫЛО МАХОЛЕТА И МАХОЛЕТ | 2015 |
|
RU2615030C2 |
| МАХОЛЕТ | 2010 |
|
RU2451623C1 |
| ДИРИЖАБЛЬ | 1989 |
|
RU2009072C1 |
| УСТРОЙСТВО ТАНДЕМНЫХ МАШУЩИХ КРЫЛЬЕВ С АВТОМАТИЧЕСКОЙ ЦИКЛИЧЕСКОЙ КРУТКОЙ И УПРАВЛЕНИЕМ ПО КРЕНУ | 2007 |
|
RU2350509C2 |
| УСТРОЙСТВО МАШУЩИХ КРЫЛЬЕВ С ЦИКЛИЧЕСКОЙ КРУТКОЙ И УПРАВЛЕНИЕМ ПО КРЕНУ | 2005 |
|
RU2298509C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2006 |
|
RU2330793C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЕМ В ВИДЕ МАШУЩИХ КРЫЛЬЕВ | 2002 |
|
RU2217355C1 |
| Махолет | 2017 |
|
RU2655582C1 |
| Механизм привода крыла орнитоптера | 1979 |
|
SU878652A1 |
Изобретение относится к летательным аппаратам (ЛА) с машущими крыльями. ЛА содержит раму, на которой установлены две цапфы с возможностью поворота вокруг двух параллельных осей. На каждой цапфе установлено крыло. Летательный аппарат содержит также первый генератор колебаний для создания колебаний цапф с целью создания маховых движений крыльев. Первый генератор колебаний содержит два рычага, неподвижно соединенные с каждой из цапф, два кривошипа, каждый из которых соединен с концом рычагов шарнирами, оси которых параллельны осям поворота цапф, шатун, соединенный с концами двух кривошипов шарнирами, оси которых параллельны осям поворота цапф, средства синхронизации вращения обеих цапф таким образом, что цапфы совершают одинаковый по углу и противоположный по направлению поворот, два электрических двигателя. Каждый двигатель управляет вращением одного из кривошипов, находящегося напротив соответствующего рычага. Первый генератор содержит блок (50) управления, предназначенный для управления и синхронизации скорости вращения двигателей и для управления смещением фазы между двигателями. Средства синхронизации содержат перекрещивающийся ремень, натянутый между цапфами. В цапфах установлены поворотные опоры, вращающиеся вокруг осей, перпендикулярных осям вращения цапф. ЛА содержит второй генератор колебаний для изменения угла атаки крыльев и средства синхронизации между приводными валами. Устройство позволяет регулировать частоту и амплитуду колебания крыльев, угол атаки крыльев. 5 з.п. ф-лы, 4 ил.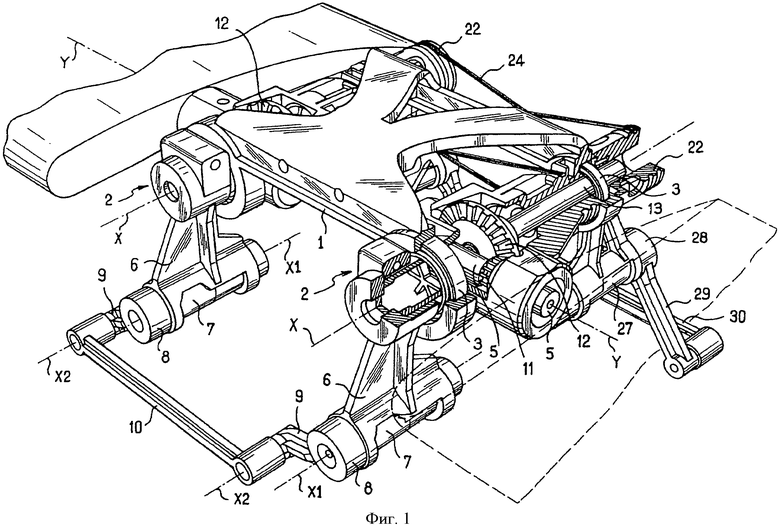
1. Летательный аппарат с машущими крыльями, содержащий раму с расположенными на ней двумя цапфами, установленными с возможностью поворота вокруг двух параллельных осей (X), при этом на каждой из цапф установлено крыло, при этом летательный аппарат содержит первый генератор колебаний для создания колебаний цапф с целью создания маховых движений крыльев, при этом первый генератор колебаний содержит два рычага (6), жестко соединенные с каждой из цапф (2); два кривошипа (9), каждый из которых соединен с концом рычагов шарнирами, оси (X1) которых параллельны осям (X) поворота цапф (2); шатун (10), соединенный с концами двух кривошипов шарнирами, оси (Х2) которых параллельны осям (X) поворота цапф; средства (4) синхронизации вращения обеих цапф, обеспечивающие одинаковый поворот цапф в противоположном направлении вращения; два электрических двигателя (7), каждый из которых выполнен с возможностью управления вращением одного из кривошипов, расположенного напротив соответствующего рычага; и блок (50) управления для управления и синхронизации скорости вращения двигателей, а также для управления смещением фазы между двигателями.
2. Летательный аппарат по п.1, в котором средства синхронизации содержат перекрещивающийся ремень (4), натянутый цапфами (2).
3. Летательный аппарат по п.1, в котором двигатели установлены на конце рычагов (6), при этом каждый кривошип (9) неподвижно соединен с вращающимся концом (8) вала соответствующего двигателя.
4. Летательный аппарат по п.1, в котором в цапфах (2) установлены поворотные опоры (5), выполненные с возможностью вращения в подшипниках вокруг осей (Y), перпендикулярных к осям (X) поворота цапф, при этом крылья соединены непосредственно с поворотными опорами, а летательный аппарат содержит второй генератор колебаний (11, 12, 13) для создания колебания поворотных опор с целью создания колебания угла атаки крыльев, при этом указанный второй генератор колебаний содержит два приводных вала (13), установленных с возможностью вращения вокруг осей поворота цапф и связанных с цапфами угловой передачей (11, 12) вращения; два рычага (6), каждый из которых неподвижно соединен с одним из приводных валов; два кривошипа (9), соединенные с концами соответствующих рычагов шарнирами, оси (X11) которых параллельны осям (X) поворота цапф (2); шатун (30), соединенный с концами двух кривошипов шарнирами, оси (Х22) которых параллельны осям (X) поворота цапф; средства (24) синхронизации вращения двух приводных валов, обеспечивающие одинаковый поворот приводных валов в противоположном направлении вращения; два электрических двигателя (27), каждый из которых выполнен с возможностью управления вращением одного из кривошипов, расположенного напротив соответствующего рычага; и блок (50) управления для управления и синхронизации скорости вращения двигателей (27), а также для управления смещением фазы между двигателями (27).
5. Летательный аппарат по п.4, в котором средства синхронизации содержат перекрещивающийся ремень (24), натянутый между приводными валами (13).
6. Летательный аппарат по п.4, в котором электрические двигатели (27) второго генератора колебаний установлены на конце рычагов (26), при этом каждый кривошип (29) неподвижно соединен с вращающимся концом (8) вала соответствующего двигателя.
| Механизм для приведения в движение крыльев орнитоптера | 1960 |
|
SU136628A1 |
| УЗЕЛ УПРАВЛЕНИЯ КРЫЛОМ МАХОЛЕТА | 2001 |
|
RU2221730C2 |
| Привод крыла орнитоптера | 1973 |
|
SU487808A1 |
| FR 419140 A, 27.12.1910 | |||
| СПОСОБ ПРОИЗВОДСТВА КОНСЕРВОВ "ОГУЗОК С ЯБЛОЧНЫМ СОУСОМ "ХРЕН" ПО-ВЕНГЕРСКИ" СПЕЦИАЛЬНОГО НАЗНАЧЕНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2304892C1 |

