Изобретения относятся к железнодорожному транспорту, в частности к устройствам для определения основного сопротивления движению подвижного состава.
Известен способ определения основного сопротивления движению как повозки самоходного подвижного состава - способ равновесных скоростей (варианты) (RU №2723132, G01M 17/08, B61K 9/08, опубл. 08.06.2020), заключающийся в измерении на прямом участке железнодорожного пути динамометрической силы тяги, скорости движения и вычислении касательной силы тяги, при этом зависимость основного сопротивления движению от скорости движения принимают предварительно для близкого вида самоходного подвижного состава, выполняют разгоны единицы самоходного подвижного состава последовательно на ряде позиций контроллера машиниста при отключенном управлении автоматического перехода с одной позиции контроллера машиниста на другую на участках железнодорожного пути с нулевым уклоном до достижения единицей самоходного подвижного состава равновесной скорости движения, определяемой по отсутствию ускорения, фиксируют значения касательной силы тяги, равные силе основного сопротивления движению как повозки, по полученным значениям основного сопротивления движения как повозки строят зависимость основного сопротивления движению как повозки от скорости, пересчитывают касательную силу тяги путем замены предварительно принятых значений основного сопротивления движению на значения, вычисленные по экспериментально полученной зависимости, по вновь полученным значениям касательной силы тяги строят новую зависимость основного сопротивления движению как повозки от скорости самоходного подвижного состава, повторяют итерационный процесс до получения необходимой точности зависимости основного сопротивления движению как повозки.
Недостатком данного способа является то, что при его применении для испытаний определяемое сопротивление движению вагона будет дополнительно содержать лобовое аэродинамическое сопротивление или хвостовое аэродинамическое сопротивление в случае, если локомотив находится позади или впереди вагона по ходу движения соответственно. Кроме того, представляется затруднительным определять отсутствие ускорений ввиду существенного влияния даже малых величин ускорения на определение сопротивления движению.
Известен динамометрический способ опытного определения основного сопротивления (Труды Всесоюзного научно-исследовательского института железнодорожного транспорта. Выпуск 311. П.Н. Астахов. Сопротивление движению железнодорожного подвижного состава. М. Транспорт.1966 г. стр. 41-63), согласно которому на прямом участке пути с нулевым уклоном измеряют сопротивление движению группы вагонов с помощью динамометрического вагона, находящегося между локомотивом и группой вагонов. Измеряемая динамометром сила тяги будет соответствовать силе сопротивления движению состава. Силу сопротивления движению одного вагона определяют делением на количество вагонов в поезде. Зачастую определяют удельное сопротивление путем деления измеренной силы сопротивления на массу состава.
Согласно приказу Минтранса России от 23.10.2017 №457 «Об утверждении методики оценки экономической эффективности эксплуатации грузовых инновационных вагонов на железнодорожной инфраструктуре железных дорог» по данному способу при проведении испытаний в составе поезда должно быть не менее 65 условных вагонов, а состав должен испытываться в порожнем и груженом состоянии. В процессе опытных поездок непрерывно регистрируют силу тяга на автосцепке, скорость движения и координату пути. Частота регистрации не реже одного раза в секунду. Измерения проводят на всем интервале допускаемых скоростей движения с шагом не более 20 км/ч.
В целях достижения сопоставимых результатов испытаний проведение поездок обеспечивается одной серией локомотивов. При испытаниях проводятся не менее двух и не более пяти опытных поездок.
При проведении расчетов принимают; что основное удельное сопротивление движению в пределах каждого интервала скорости является величиной постоянной и может быть рассчитано по выражению:

где ƒДср - удельная средняя на выбранном отрезке пути величина динамометрической силы тяги (определяется по формуле ƒДср=FДср/Q, где FДср - средняя на выбранном отрезке пути величина динамометрической силы тяги, Н; Q - масса состава, т), Н/т;
Wi - сопротивление движению от уклона (определяется по формуле wi=i⋅g, где i - уклон, ‰, g - ускорение свободного падения (9,81 м/с2). Численное значение wi входит в это уравнение со знаком «минус» на подъемах и со знаком «плюс» на спусках), Н/т;
wr - сопротивление движению от кривых (определяется по формуле wr=6870/R, где R - радиус кривой, м), Н/т;
γ - коэффициент, равный отношению масс вращающихся частей вагона ко всей массе вагона;
а - ускорение поезда, м/с2.
Основное удельное сопротивление движению оцениваемых вагонов определяют по формуле:

где  - основное удельное сопротивление оцениваемого вагона;
- основное удельное сопротивление оцениваемого вагона;
a ОЦ, bОЦ, сОЦ - соответственно коэффициенты аппроксимирующей зависимости усредненных по интервалам скоростей значений основного удельного сопротивления движению для оцениваемых вагонов; V - скорость движения поезда, км/ч.
Недостатками данного способа являются низкая точность измерений из-за постоянных изменений динамометрической силы тяги, вызванных продольными колебаниями вагонов в составе поезда, и высокая стоимость проведения испытаний из-за необходимости исключения из коммерческой эксплуатации 65 вагонов, необходимости арендовать груз для загрузки 65 вагонов, провести загрузку и выгрузку.
Известно устройство для регистрации параметров движения поезда (RU №2041100, B61L 25/02, опубл. 09.08.1995), содержащее датчик пути и скорости, подключенный к входу блока определения пройденного пути и к одному входу блока определения скорости, выходом связанного с одним из входов регистратора, другим входом связанного с датчиком давления в тормозной магистрали, а третьим входом с выходом блока определения текущего времени, вход которого подключен к датчику меток времени, связанному с вторым входом блока определения скорости, снабженное пороговым элементом, элементом задания режима ручного управления, логическим элементом И и логическим элементом ИЛИ, выходом связанным с четвертым входом регистратора, одним входом с выходом блока определения пройденного пути, а другим входом с выходом логического элемента И, входы которого подключены к датчику меток времени, выходу элемента задания режима ручного управления и выходу порогового элемента, вход которого соединен с выходом блока определения скорости.
Недостатком данного устройства является отсутствие возможности определения продольного ускорения, необходимого для расчета сопротивления движению.
Известно устройство для осуществления способа определения удельного сопротивления движению подвижного состава (SU №914381, B61L 17/00, опубл. 23.03.1982), снабженное соединенными последовательно аналого-цифровым преобразователем и блоком вычисления, выход которого подключен к блоку вывода информации, а блок измерения и регистрации параметров движения состоит из установленного на необрессоренных конструкциях подвижного состава акселерометра, ось которого ориентирована вдоль пути, усилителя и фильтра, через которые акселерометр подключен к аналого-цифровому преобразователю, и отметчика оборотов колес с формирователем управляющих импульсов, подключенным к аналого-цифровому преобразователю.
Недостатком данного устройства являются высокие требования к измерительной аппаратуре, входящей в состав устройства, поскольку при его использовании для осуществления способа определения удельного сопротивления движению подвижного состава необходимо проводить прямые измерения величины ускорения порядка 0,001-0,002 g в условиях действия сильных динамических и электромагнитных помех, что практически недостижимо при использовании известных акселерометров. Регистрируемое ускорение меньше ошибки измерений известных акселерометров. Поэтому его предлагается применять при малых скоростях движения при скатывании вагонов по большим уклонам на сортировочных горках.
Известен способ скатывания и устройство для определения основного сопротивления движению (Труды Всесоюзного научно-исследовательского института железнодорожного транспорта. Выпуск №311. П.Н. Астахов. Сопротивление движению железнодорожного подвижного состава. М. Транспорт.1966 г. стр. 63-71), принятый в качестве прототипа. Способ заключается в том, что испытуемый объект (поезд или самоходный подвижной состав) разгоняется, затем на заранее выбранном прямом участке пути с известными уклонами двигатели отключают, и подвижной состав скатывается под действием кинетической энергии, накопленной при разгоне, постепенно замедляясь. По степени замедления определяют силу сопротивления движению поезда или самоходного подвижного состава.
Устройство для определения основного сопротивления движению размещают на локомотиве или вагоне-лаборатории. Устройство включает в себя прибор точного измерения времени (хронограф), регистрирующий прибор в виде лентопротяжного механизма с бумажной лентой и специальный замыкатель для отметки пикетов и километровых столбов. В процессе испытаний отметки точного времени и прохождение отметок на пути фиксируются на бумажной ленте, а затем обрабатываются для вычисления ускорения замедляющегося движения подвижного состава. Теоретической основой способа определения сопротивления движению является выражение
где wk - удельное сопротивление движению;
i - уклон пути;
γ - коэффициент, учитывающий влияние вращающихся колесных пар;
V - скорость;
t - время;
1000 - переводной коэффициент из тонн в килограммы;
 - ускорение испытуемого объекта.
- ускорение испытуемого объекта.
Однако непосредственная величина ускорения испытуемого объекта не определяется. На основе отметок времени хронографа и ручных отметок о прохождении пикетов и километровых столбов определяется зависимость пройденного пути от времени. В дальнейшем величина ускорения определяется двойным дифференцированием полученной зависимости пройденного пути от времени. Величина уклона берется из таблиц нивелировки пути. После проезда испытательного участка состав или самоходного транспортное средство тормозятся машинистом и останавливаются. Опыты повторяются несколько раз, при сообщении испытываемой единице подвижного состава различных начальных скоростей, с целью охвата всего скоростного диапазона.
Достоинством данного способа по сравнению с динамометрическим способом является большая точность измерений, так как определяется только пройденный путь и время, а не постоянно изменяющаяся сила в автосцепке.
Недостатками данного способа связанные с точностью измерений перечислены ниже:
- При определении сопротивления движению вагонов в составе поезда с локомотивом вносится погрешность измерений, связанная с сопротивлением движению локомотива, которое на порядок превосходит сопротивлению движению вагона. Поэтому необходимо предварительно знать силы сопротивления локомотива на выбеге, что представляет собой отдельную задачу.
- Возникающие ошибки при распространении результатов измерений сопротивления отдельного движущегося вагона на сопротивление движению в составе поезда в виду образования лобовой и хвостовой составляющих аэродинамического сопротивления и отсутствия типичного для вагона в составе поезда воздушного сопротивления от межвагонных промежутков.
- Двойное дифференцирование пройденного пути ведет к увеличению погрешности измерения.
- Отметка прохождения пикетов и километровых столбов вручную вносит погрешность в измерения пройденного пути.
Кроме того, данный способ нельзя применить к проведению испытаний для отдельного грузового вагона, ввиду невозможности остановить вагон после прохождения измерительного участка из-за отсутствия соединения с тормозной магистралью локомотива и соответственно возможности включить тормоз (длина выбега вагона со скорости 100 км/ч может достигать 30-40 км).
Технический результат заявленного изобретения заключается в повышении точности измерений при определении основного сопротивления движению грузовых вагонов в составе поезда при сопутствующем снижении стоимости испытаний.
Повышение точности измерений достигается, при применении устройства для определения основного сопротивления движению грузовых вагонов, включающего приборы измеряющие время, пройденный путь, скорость движения и содержащего расположенные на грузовом вагоне, прибор включения тормоза, имеющий тормозные рукава с быстроразъемными соединениями для подключения к тормозным магистралям грузового вагона и вагона-лаборатории или локомотива, электромагнитный клапан выпуска воздуха из тормозной магистрали с радиоуправляемым реле и резервным реле времени, аккумуляторную батарею и навигационный приемник для измерения времени, пройденного пути и скорости движения, подключенный к ЭВМ, вычисляющей основное сопротивление движению
Реализуют отцеп испытываемого вагона от поезда на заданной скорости с задержкой торможения испытываемого вагона, позволяющей исключить влияние сопротивления движению локомотива и вагона-лаборатории, а также учесть величины, характеризующие его лобовое и хвостовое аэродинамические сопротивления. Для этого испытываемый вагон оборудуют устройством включения тормоза и отцепляют от поезда на заданной скорости на заранее выбранном прямолинейном участке пути с известным уклоном, и по измеряемому времени, изменению скорости и координатам положения испытываемого вагона при помощи ЭВМ вычисляют основное сопротивление движения грузового вагона в одиночном движении, с помощью аэродинамического расчета на цифровых моделях вычисляют аэродинамическое сопротивление испытываемого вагона при одиночном движении и движении в составе поезда и на основании полученных экспериментальных и расчетных данных определяют основное сопротивление движению испытываемого вагона в составе поезда по формуле:

где WK - основное сопротивление движению испытываемого вагона в составе поезда;
WК0 - основное сопротивление движению одиночного испытываемого вагона, полученное в эксперименте путем обработки измерений скорости вагона и его положения на пути;
Wаэр 0 - аэродинамическое сопротивление одиночного испытываемого вагона, полученное аэродинамическим расчетом на цифровой модели одиночного вагона;
Wаэр n - аэродинамическое сопротивление испытываемого вагона в поезде, полученное аэродинамическим расчетом на цифровых моделях вагона в составе поезда.
При этом основное сопротивление испытываемого вагона WК0 в одиночном движении определяют по формуле:

где М - масса испытываемого вагона брутто;
g - ускорение свободного падения;
i=ƒ(x) - уклон пути;
х - координата положения вагона на измерительном участке,
γ=4J/mr2 - коэффициент инертности вращающихся колесных пар;
J - момент инерции колесной пары;
m - масса колесной пары;
r - радиус колесной пары;
V - скорость движения испытываемого вагона;
t - время.
Также точность определения основного сопротивления движению грузовых вагонов в составе поезда повышается за счет того, что в качестве прибора, измеряющего время, пройденный путь и скорость движения, используется навигационный приемник, подключенный к ЭВМ, вычисляющей основное сопротивление движению по формуле (2), закрепленные на испытываемом вагоне, а само устройство снабжено прибором дистанционного включения тормоза вагона, содержащим тормозные рукава с быстроразъемными соединениями для подключения к тормозным магистралям поезда и испытуемого грузового вагона, аккумуляторную батарею, электромагнитный клапан выпуска воздуха из тормозной магистрали грузового вагона с радиоуправляемым реле и резервным реле времени.
Применение предложенного устройства позволяет повысить точность измерений на порядок в сравнении с прототипом. Например, для приемника навигационного МНП-М7 предел допускаемой абсолютной погрешности скорости составляет ±0,003 м/с, положения на пути ±3 м, а времени ±100*10-9 сек.
Снижение стоимости испытаний достигается за счет того, что проведение испытаний согласно заявленному способу позволяет уменьшить количество испытываемых вагонов и их загрузок и разгрузок. Испытывается один вагон, а не состав вагонов.
Сущность предлагаемого устройства поясняется графическим материалом.
На фигуре 1 изображена схема проведения испытаний с устройством для определения основного сопротивления движению вагона;
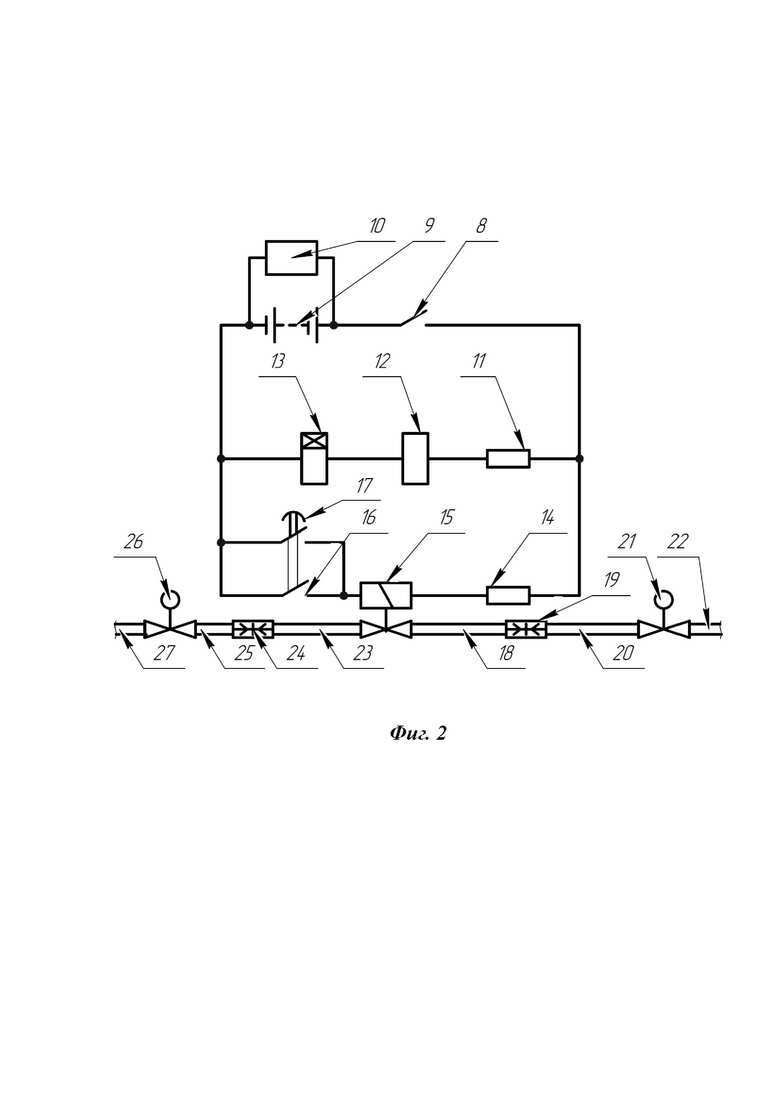
На фигуре 2 изображен прибор включения тормоза вагона;
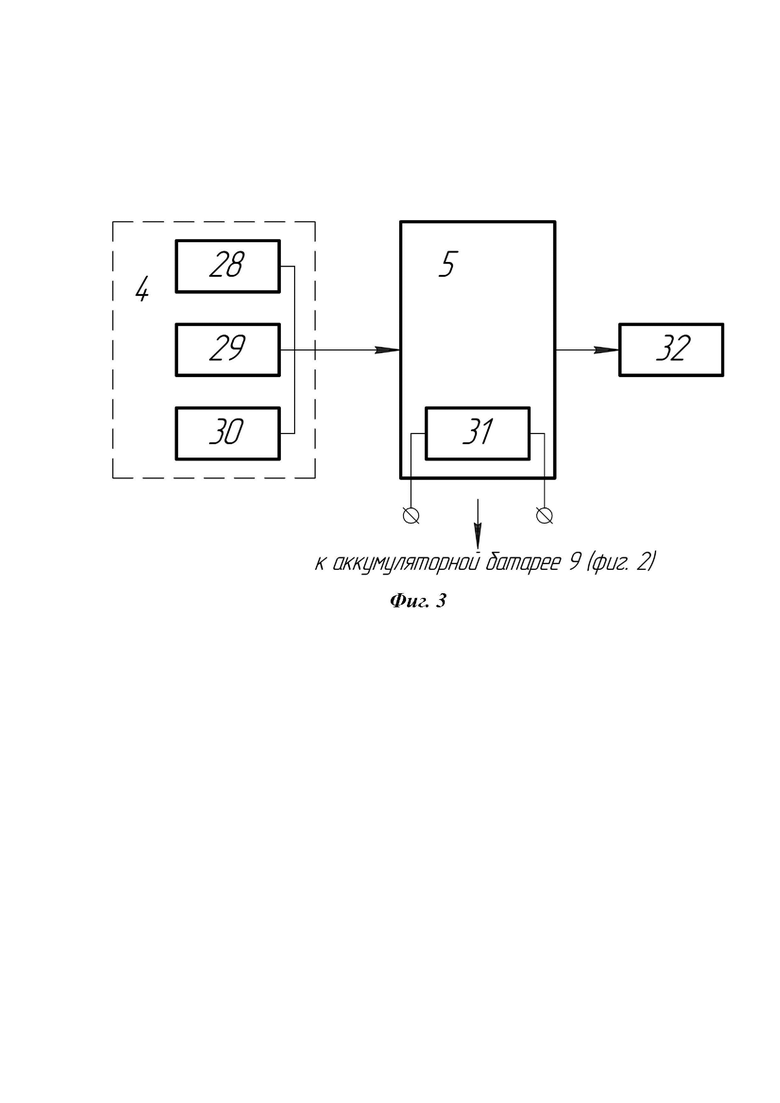
На фигуре 3 приведена схема измерения сопротивления движению одиночного вагона;
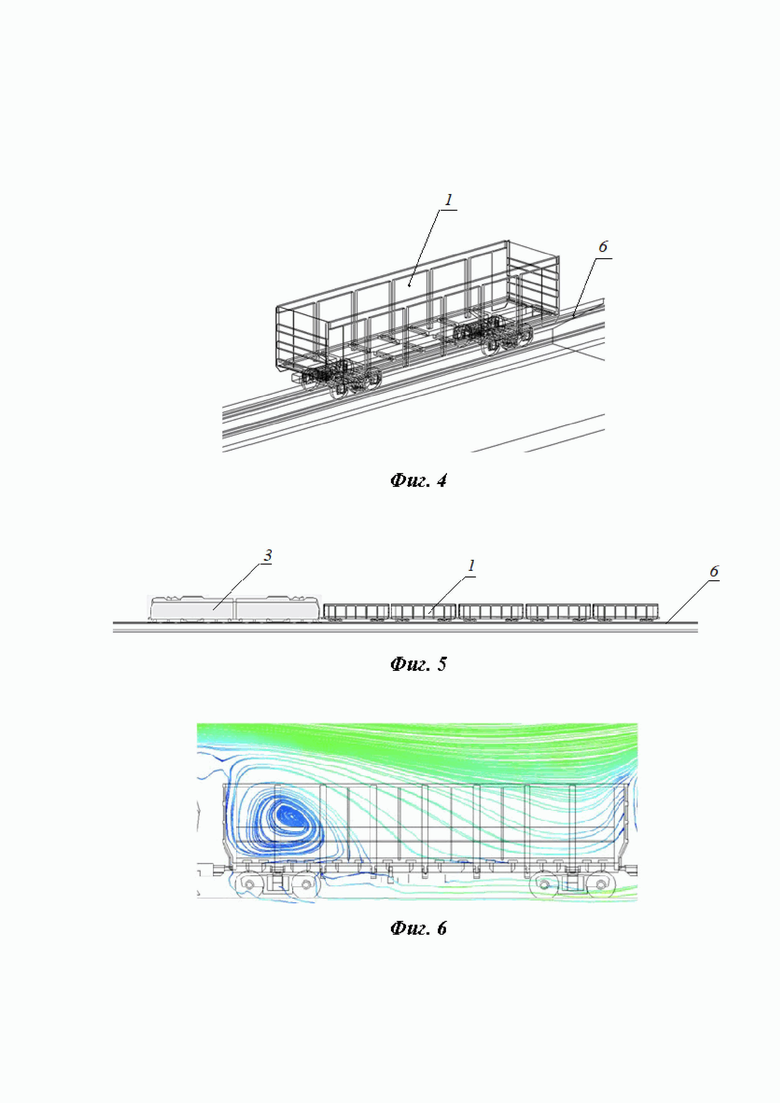
На фигуре 4 изображен пример цифровой модели одиночного испытываемого вагона;
На фигуре 5 изображен пример цифровой модели испытываемого вагона в составе поезда;
На фигуре 6 изображен пример аэродинамического расчета цифровой модели испытываемого вагона.
Способ определения основного сопротивления движению подвижного состава, заключается в том, что испытываемый вагон 1 (фиг. 1) отцепляемый от вагона-лаборатории 2 или от локомотива 3 и содержащий навигационный приемник 4, соединенный с ЭВМ 5, соединенную с прибором 6 включения тормоза, на заданной скорости на заранее выбранном прямолинейном участке пути 7 с известными уклонами, скатывается под действием кинетической энергии, накопленной при разгоне, и при помощи прибора 6 включения тормоза, осуществляют задержку срабатывания тормоза испытываемого вагона 1 при этом локомотив 3 или вагон-лаборатория 2 удаляются на фиксированное расстояние от испытываемого вагона 1 таким образом, чтобы на испытываемый вагон 1 воздействовали силы лобового и хвостового аэродинамических сопротивлений, возникающие естественно, и по регистрируемому изменению скорости и координатам положения испытываемого вагона 1 при помощи ЭВМ 5 определяют величину сопротивления движению одиночного испытываемого вагона, а при помощи аэродинамического расчета на цифровых моделях определяют аэродинамическое сопротивление испытываемого вагона 1 в поезде, при этом величину основного сопротивления движению вагона в составе поезда определяют по формуле (1).
Устройство, поясняемое фигурами 2, 3 размещено на испытываемом вагоне 1 (фиг. 1) и состоит из навигационного приемника 4, соединенного при помощи проводной связи с ЭВМ 5, соединенной при помощи проводной связи с прибором 6 включения тормоза, находящемся на заранее выбранном прямолинейном участке пути 7. Схема прибора 6 включения тормоза представлена на фигуре 2. На вагоне-лаборатории 2 (фиг. 1) размещен беспроводной пульт дистанционного управления (на фигуре не показан) для передачи сигнала дистанционно на катушку 12 (фиг. 2) радиоуправляемого реле, содержащуюся в приборе 6 включения тормоза. Прибор 6 включения тормоза содержит соединенные последовательно механический ключ-переключатель 8 состояний электрической цепи, аккумуляторную батарею 9, к которой параллельно подключена измерительная схема 10, поясняемая фигурой 3, соединенные параллельно им и последовательно между собой резистор 11 дополнительного сопротивления, катушку 12 радиоуправляемого реле, катушку 13 резервного реле времени, соединенные параллельно им и последовательно между собой резистор 14 дополнительного сопротивления, электромагнитный клапан 15 выпуска воздуха, соединенные в параллель контакт радиоуправляемого реле 16 и контакт реле времени 17 для питания электромагнитного клапана 15, сообщающегося с тормозной системой испытываемого вагона 1 через тормозной рукав 18, соединенный через быстроразъемное соединение 19 с тормозным рукавом 20, соединенным через концевой кран 21 с тормозной магистралью 22 испытываемого вагона 1 и сообщающегося с тормозной системой вагона-лаборатории 2 через тормозной рукав 23, соединенный через быстроразъемное соединение 24 с тормозным рукавом 25, соединенным через концевой кран 26 с тормозной магистралью 27 вагона-лаборатории 2. Соединенная параллельно аккумуляторной батарее 9, измерительная схема 10 содержит навигационный приемник 4, содержащий блок формирования сигналов точного времени 28 (фиг. 3), блок измерения скорости движения 29, блок определения географических координат местонахождения приемника 30, подключенный к ЭВМ 5, содержащую блок питания 31 с разъемами для подключения внешнего источника питания и блок вывода информации 32.
Определение основного сопротивления вагона в составе поезда проводится по следующему алгоритму:
1. Рассчитывается аэродинамическое сопротивление одиночного испытываемого вагона 1 на цифровой модели испытываемого вагона 1. Пример такой модели показан на фигуре 4. Пример аэродинамического расчета показан на фигуре б.
2. Рассчитывается аэродинамическое сопротивление испытываемого вагона 1 в составе поезда Wаэр n на цифровой модели поезда. Пример такой цифровой модели показан на фигуре 5.
3. Экспериментально определяется основное сопротивление движению одиночного испытываемого вагона 1 WК0 путем обработки результатов измерения скорости V, времени и координат положения испытываемого вагона 1 на прямом участке с известными уклонами при проведении испытаний согласно заявленному способу при помощи ЭВМ по выражению (2). Схема проведения испытаний показана на фигуре 1.
4. При необходимости определяется механическое сопротивление одиночного испытываемого вагона 1 при скатывании Wмех 0, для дополнительного сравнения вагонов по составляющим сопротивлению движения:
Wмех 0=WК0-Wаэр 0,
где WК0 - основное сопротивление движению одиночного испытываемого вагона 1;
Wаэр 0 - аэродинамическое сопротивление одиночного в испытываемого вагона 1.
5. Определяется основное сопротивление вагона движению испытываемого вагона в составе поезда WК с учетом того, что механическое сопротивленне одиночного вагона Wмex 0 и механическое сопротивление вагона в составе поезда Wмex n равны:
Wмех 0=Wмех n,
WК=Wмех 0+Wаэр n,
или

где Wаэр n - аэродинамическое сопротивление испытываемого вагона 1 в составе поезда.
б. Основное сопротивление испытываемого вагона 1 WК0 в одиночном движении определяют по формуле:

где М - масса испытываемого вагона 1 брутто;
g - ускорение свободного падения;
i=ƒ(x) - уклон пути;
х - координата положения испытываемого вагона 1 на измерительном участке,
γ=4J/mr2 - коэффициент инертности вращающихся колесных пар;
J - момент инерции колесной пары;
m - масса колесной пары;
r - радиус колесной пары;
V - скорость движения испытываемого вагона 1;
t - время.
Испытания проводятся следующим образом.
На стоянке включается питание навигационного приемника 4 (фиг. 1) и ЭВМ 5, тормозной магистралью 22 (фиг. 2) испытываемого вагона 1, соединенный через концевой кран 21 с тормозным рукавом 20 через быстроразъемное соединение 19 соединяется с тормозным рукавом 18, который соединяется с электромагнитным клапаном выпуска воздуха 15, который в свою очередь соединяется с тормозным рукавом 23, соединенным через быстроразъемное соединение 24 с тормозным рукавом 25, соединенным через концевой кран 26 с тормозной магистралью 27 вагона-лаборатории 2 и тормозной системой поезда (на фигуре не показаны), механический ключ-переключатель 8 разомкнут.Происходит зарядка тормозной магистрали 22 испытываемого вагона 1 сжатым воздухом. После зарядки тормозной магистрали 22 механический ключ 8 замыкается, катушки радиоуправляемого реле 12 и резервного реле времени 13 получают питание от аккумуляторной батареи 9, посредством сигнала с пульта дистанционного управления посылается сигнал на катушку радиоуправляемого реле 12, замыкающую контакт радиоуправляемого реле 16 и контакт реле времени 17. Электромагнитный клапан выпуска воздуха 15 получает питание от аккумуляторной батареи 9 и перекрывает сообщение тормозных рукавов 18, 23, тем самым разъединяя тормозную магистраль 22 испытываемого вагона 1 и тормозной магистрали 27 вагона-лаборатории 2, концевой кран 26 вагона-лаборатории закрывается, тормозной рукав 25 тормозной магистрали 27 отсоединяется от тормозного рукава 23 при помощи быстроразъемного соединения 24. Тормозная магистраль 22 заряжена, разобщена с тормозной магистралью 27, тормозные системы механически разъединены, испытываемый вагон 1 готов к испытаниям. Локомотив 3 разгоняется вместе с составом, включающим вагон-лабораторию 2 и испытываемый вагон 1, до заданной скорости, на границе измерительного участка оператор (на фигурах не показан), находящийся в вагоне-лаборатории 2 производит операцию по расцеплению вагона-лаборатории 2 и испытываемого вагона 1, который начинает замедленное движение под действием накопленной кинетической энергии при разгоне, сил инерции и сил сопротивления движению. Локомотив 3 удаляется от испытываемого вагона 1 на такое расстояние, чтобы возмущение воздушной среды, вызываемое поездом не влияло на воздушный поток, набегающий на испытываемый вагон 1. При этом производится непрерывная регистрация координат положения, скорости испытываемого вагона 1 и времени по навигационному приемнику 4, связанному с ЭВМ 5, представляющие собой измерительную схему 10, подключенную блоком питания 31 (фиг. 3) ЭВМ 5 к аккумуляторной батарее 9 (фиг. 2), прибора 6 (фиг. 1) включения тормоза. В навигационном приемнике 4 в блоке формирования сигналов точного времени 28 формируются сигналы точного времени, вместе с тем блоком измерения скорости движения 29 измеряется скорость движения вагона, а блок определения географических координат местонахождения приемника 30 определяет координаты положения вагона на железнодорожном пути. Эти данные передаются на ЭВМ 5, закрепленную на испытуемом вагоне 1, которая, вычисляет значение сопротивления движению согласно формуле (2) и направляет ее на блок вывода информации 32.
Если измерительный участок пройден или дальнейшее движение нецелесообразно, испытываемый вагон 1 останавливается включением тормоза с помощью прибора 6 включения тормоза. В зависимости от варианта исполнения прибора 5 включения тормоза испытания проводят следующим образом.
Оператор, находящийся в вагоне-лаборатории 2, подает дистанционно при помощи пульта дистанционного управления (на фигуре не показан) радиосигнал на катушку радиоуправляемого реле 12, тем самым размыкая контакты радиоуправляемого реле 16 и реле времени 17, таким образом электромагнитный клапан 15 выпуска воздуха теряет питание от аккумуляторной батареи 9 и переходит в открытое состояние, воздух из тормозной магистрали 22 выходит через соединенные концевой кран 21, тормозной рукав 20, соединенный через быстроразъемное соединение 19 с тормозным рукавом 18, соединенным с отверстием электромагнитного клапана 15 выпуска воздуха и, реагируя на падение давления, срабатывает автоматический тормоз, и испытываемый вагон 1 останавливается. После остановки испытываемого вагона 1 данные о сопротивлении движению снимаются с блока вывода информации 32 ЭВМ 5.
Для обеспечения безопасности испытаний, на резервном реле времени 13 фиксируется определенное значение времени, спустя которое катушка резервного реле времени 13 разомкнет свой контакт 17, а вместе с ним и контакт радиоуправляемого реле 16, таким образом электромагнитный клапан 15 выпуска воздуха теряет питание от аккумуляторной батареи 9 и переходит в открытое состояние, воздух из тормозной магистрали 22 выходит через соединенные концевой кран 21, тормозной рукав 20, соединенный через быстроразъемное соединение 19 с тормозным рукавом 18, соединенным с отверстием электромагнитного клапана 15 выпуска воздуха и, реагируя на падение давления, срабатывает автоматический тормоз, и испытываемый вагон 1 останавливается. После остановки испытываемого вагона 1 данные о сопротивлении движению снимаются с блока вывода информации 32 ЭВМ 5.
Локомотив 3 подъезжает к испытываемому вагону 1, производится сцеп испытываемого вагона 1 с вагоном-лабораторией 2, и испытание повторяется.
Таким образом достигается технический результат, заключающийся в повышении точности измерений при использовании устройства для определения основного сопротивления движению вагонов в составе поезда при сопутствующем снижении стоимости испытаний.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДЛЯ ИСПЫТАНИЯ ТОРМОЗНОГО ОБОРУДОВАНИЯ ВАГОНОВ | 2009 |
|
RU2414366C2 |
| РАСПРЕДЕЛЕННАЯ СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ОДНОЛОКОМОТИВНЫМ ПОЕЗДОМ ПОВЫШЕННОЙ ДЛИНЫ | 2009 |
|
RU2388630C1 |
| СПОСОБ И СИСТЕМА РАСПРЕДЕЛЕННОГО УПРАВЛЕНИЯ ТОРМОЗАМИ ПОЕЗДОВ ПОВЫШЕННОЙ МАССЫ И ДЛИНЫ | 2014 |
|
RU2571000C2 |
| Способ и устройство измерения величины и направления продольных динамических реакций в поезде | 2021 |
|
RU2770998C1 |
| Способ и устройство измерения продольных сил, прикладываемых к автосцепкам грузовых поездов | 2020 |
|
RU2742528C1 |
| БОРТОВОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ЭФФЕКТИВНОСТИ АВТОТОРМОЗОВ ПОЕЗДА В ПУТИ СЛЕДОВАНИЯ | 2005 |
|
RU2293673C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЛОКОМОТИВОВ ПРИ МАНЕВРОВОЙ РАБОТЕ | 2010 |
|
RU2422315C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТОРМОЗАМИ ПОЕЗДОВ ПОВЫШЕННОГО ВЕСА И ДЛИНЫ | 2012 |
|
RU2513878C2 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА БАЗЕ РАДИОКАНАЛА | 2014 |
|
RU2556133C1 |
| ТОРМОЗНАЯ СИСТЕМА ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА | 2017 |
|
RU2648493C1 |
Изобретения относятся к железнодорожному транспорту. Устройство для определения основного сопротивления движению грузового вагона содержит прибор включения тормоза (6), подключенный к аккумуляторной батарее, включающий тормозные рукава, электромагнитный клапан выпуска воздуха из тормозной магистрали с радиоуправляемым реле и резервным реле времени. Для изменения времени, пройденного пути и скорости движения используют навигационный приемник (4), закрепленный на испытываемом вагоне (1), подключенный к ЭВМ (5). Изобретение повышает точность измерений при определении основного сопротивления движению грузовых вагонов в составе поезда. 6 ил.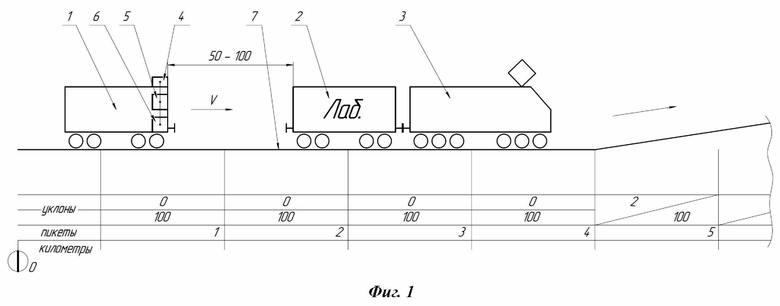
Устройство для определения основного сопротивления движению грузового вагона, включающее приборы, измеряющие время, пройденный путь, скорость движения, отличающееся тем, что содержит расположенные на грузовом вагоне прибор включения тормоза, имеющий тормозные рукава с быстроразъемными соединениями для подключения к тормозным магистралям грузового вагона и вагона-лаборатории или локомотива, электромагнитный клапан выпуска воздуха из тормозной магистрали с радиоуправляемым реле и резервным реле времени, аккумуляторную батарею и навигационный приемник для измерения времени, пройденного пути и скорости движения, подключенный к ЭВМ, вычисляющей основное сопротивление движению грузового вагона.
| КРОН И | |||
| Р., БОРОНЕНКО Ю | |||
| П., ЭНЕРГОЭФФЕКТИВНОСТЬ ГРУЗОВЫХ ВАГОНОВ И НОВЫЙ МЕТОД ОПРЕДЕЛЕНИЯ ИХ ОСНОВНОГО СОПРОТИВЛЕНИЯ ДВИЖЕНИЮ,ТРАНСПОРТ: ПРОБЛЕМЫ, ИДЕИ, ПЕРСПЕКТИВЫ, Сборник трудов LXXXII Всероссийской научно-технической конференции студентов, аспирантов и молодых ученых, в двух томах, ответственные за выпуск О.В | |||
| Гимазетдинова, М.С | |||
| Панова | |||
| - |

