Изобретение относится к области железнодорожной автоматики и телемеханики и может быть использовано в системах управления движением локомотивов.
Известна система управления движением локомотивов, содержащая локомотивные и путевые блоки для передачи по рельсовой линии и реализации кодов автоматической локомотивной сигнализации при управлении движением поезда (Леонов А.А. «Техническое обслуживание автоматической локомотивной сигнализации». М.: Транспорт, 1982, с.255). Однако эта система управления не предназначена для маневровой работы.
Известна система, содержащая блок аппаратуры поста электрической централизации (ЭЦ), соединенный через блок контроллера опроса с первым портом ЭВМ автоматизированного рабочего места маневрового диспетчера, второй порт которой через блок станционного формирователя, стационарный приемопередатчик радиоблокцентра, его антенну и индивидуальные полудуплексные цифровые каналы связи соединен с антеннами бортовых приемопередатчиков соответствующих маневровых локомотивов, причем порт каждого из упомянутых бортовых приемопередатчиков соединен с первым портом бортового контроллера консоли управления маневровой работой локомотива, выход каждого из упомянутых бортовых приемопередатчиков соединен с входом блока индикации, а вход соединен с выходом блока клавиатуры ввода информации, при этом первый и второй входы упомянутого контроллера соединены соответственно с выходами первого и второго колесных датчиков импульсов, а третий вход соединен с выходом приемника спутниковой навигации (Кочнев А.В. «Маневровая автоматическая локомотивная сигнализация». Журнал "Автоматика, связь, информатика", 2000, №4, с.43-47). Недостатком известной системы является отсутствие прицельного торможения состава, что снижает безопасность проведения маневров.
Наиболее близким к заявляемой системе управления движением локомотивов при маневровой работе является, выбранная в качестве прототипа, система автоматического управления маневровым локомотивом (RU 2284275, B61L 3/20, 27.09.06), содержащая светофоры и рельсовые цепи, соединенные с блоком кодирования и контроля рельсовых цепей, причем вход блока кодирования и контроля рельсовых цепей подключен к выходу блока аппаратуры поста ЭЦ, а блок автоматической локомотивной сигнализации подключен входом к локомотивным катушкам, а выход блока автоматической локомотивной сигнализации подключен к первым входам блока индикации и блока вычисления программной скорости, датчик пути и скорости соединен через скоростимер с вторым входом блока индикации, с входом блока измерения ускорения и с первым входом блока сравнения, второй вход которого соединен с выходом блока вычисления программной скорости, и с третьим входом блока индикации, а выход подключен к блоку управления тормозами и тягой, контроллер управления тяговыми двигателями подсоединен первым выходом к блоку спутниковой навигационной системы и электронной карты, выход которого подключен к второму входу блока вычисления программной скорости, и вторым выходом соединен с первым входом блока определения положения вагонов, второй и третий входы которого соединены соответственно с первым и вторым концевыми выключателями автосцепок локомотива, а выход соединен с третьим входом блока вычисления программной скорости, четвертый вход которого соединен с выходом блока памяти, первый вход которого соединен с выходом блока измерения ускорения, а второй вход соединен с выходом блока определения остановки, вход которого связан с выходом датчика пути и скорости.
Недостатком известной системы является невысокая производительность маневровой работы из-за избыточного пробега маневровых локомотивов в процессе формирования составов. Например, при полурейсах вытягивания вагонов с боковых путей в горловину станции и последующем осаживании вагонов из горловины станции на путь нахождения формируемого состава имеется необходимость заездов за последние в маршруте маневровые светофоры для автоматического размыкания всего или (при посекционном размыкании) автоматического размыкания последней секции использованного маневрового маршрута. Другим фактором, снижающим производительность системы, является не достаточная достоверность и полнота информации, поступающей маневровому диспетчеру о местоположении, общей длине и других данных оставленных на путях отцепленных вагонах.
Техническим результатом, на достижение которого направлено изобретение, является повышение производительности системы при сохранении требуемого уровня функциональной безопасности.
Технический результат достигается тем, что в системе управления движением локомотивов при маневровой работе, содержащей светофоры и рельсовые цепи, соединенные с блоком кодирования и контроля рельсовой цепи, который подключен к блоку аппаратуры поста электрической централизации, и блок автоматической локомотивной сигнализации, подключенный входом к локомотивным катушкам, первый выход блока автоматической локомотивной сигнализации соединен с первыми входами блока индикации и блока вычисления программной скорости, датчик пути и скорости, соединенный через скоростемер с вторым входом блока индикации, с входом блока измерения ускорения и с первым входом блока сравнения, второй вход которого соединен с выходом блока вычисления программной скорости и с третьим входом блока индикации, выход блока сравнения подключен к блоку управления тормозами и тягой, контроллер управления тяговыми двигателями подсоединен первым выходом к блоку спутниковой навигационной системы и электронной карты, выход которого подключен к второму входу блока вычисления программной скорости, второй выход контроллера управления подключен к первому входу блока определения положения вагонов, второй и третий входы которого соединены соответственно с первым и вторым концевыми выключателями автосцепок локомотива, а выход - подключен к третьему входу блока вычисления программной скорости, четвертый вход которого соединен с выходом блока памяти, первый вход которого соединен с выходом блока измерения ускорения, а второй вход соединен с выходом блока определения остановки, вход которого связан с выходом датчика пути и скорости, согласно изобретению блок автоматической локомотивной сигнализации и блок аппаратуры поста электрической централизации связаны между собой через свои антенны посредством радиоканала цифровой связи, причем блок аппаратуры поста электрической централизации соединен с ЭВМ автоматизированного рабочего места маневрового диспетчера, в блоке памяти которой содержится база данных о местоположении групп отцепленных вагонов, находящихся в пределах станции, при этом блок аппаратуры поста электрической централизации снабжен блоком ускорения автоматического размыкания последних секций маршрутов, а второй выход блока автоматической локомотивной сигнализации подключен к входу управления отображением последней секции маневрового маршрута на дисплее блока индикации.
На чертеже представлена схема системы управления движением локомотивов при маневровой работе.
Система управления движением локомотивов при маневровой работе содержит светофоры 1, 2 и рельсовые цепи 3, 4 и 5, соединенные с блоком 6 кодирования и контроля рельсовой цепи, который подключен к блоку 7 аппаратуры поста электрической централизации, и блок 8 автоматической локомотивной сигнализации, подключенный входом к локомотивным катушкам 9, первый выход блока 8 автоматической локомотивной сигнализации соединен с первыми входами блока 10 индикации и блока 11 вычисления программной скорости, датчик 12 пути и скорости, соединенный через скоростимер 13 с вторым входом блока индикации, с входом блока 14 измерения ускорения и с первым входом блока 15 сравнения, второй вход которого соединен с выходом блока 11 вычисления программной скорости и с третьим входом блока 10 индикации, выход блока 15 сравнения подключен к блоку 16 управления тормозами и тягой, контроллер 17 управления тяговыми двигателями подсоединен первым выходом к блоку 18 спутниковой навигационной системы и электронной карты, выход которого подключен к второму входу блока 11 вычисления программной скорости, второй выход контроллера 17 управления подключен к первому входу блока 19 определения положения вагонов, второй и третий входы которого соединены соответственно с первым 20 и вторым 21 концевыми выключателями автосцепок локомотива, а выход - подключен к третьему входу блока 11 вычисления программной скорости, четвертый вход которого соединен с выходом блока 22 памяти, первый вход которого соединен с выходом блока 14 измерения ускорения, а второй вход соединен с выходом блока 23 определения остановки, вход которого связан с выходом датчика 12 пути и скорости, блок 8 автоматической локомотивной сигнализации и блок 7 аппаратуры поста электрической централизации связаны между собой через свои антенны 24 и 25 посредством радиоканала 26 цифровой связи, блок 7 аппаратуры поста электрической централизации соединен с ЭВМ 27 автоматизированного рабочего места маневрового диспетчера, в блоке 28 памяти которой содержится база данных о местоположении групп отцепленных вагонов, находящихся в пределах станции, при этом блок 7 аппаратуры поста электрической централизации снабжен блоком 29 ускорения автоматического размыкания последних секций маршрутов, а второй выход блока 8 автоматической локомотивной сигнализации подключен к входу управления отображением последней секции маневрового маршрута на дисплее блока 10 индикации.
Система управления движением локомотивов при маневровой работе функционирует следующим образом.
Для маневрового передвижения с участка, оборудованного рельсовой цепью 3 перед (маневровым) светофором 1, на участок, оборудованный рельсовой цепью 5, перед светофором 2, дежурный по станции открывает светофор 1 и блок 6 кодирования и контроля рельсовых цепей передает в рельсовые цепи по маршруту соответствующие коды. Перед светофором 1 передается код, разрешающий движение (Ж, если используется аппаратура числового кода) (и маневровые светофоры используются при задании маршрутов), а перед светофором 2 передается код КЖ в рельсовые цепи 5 и 4 на пути и в стрелочную секцию с двух сторон, учитывая возможность нахождения вагонов спереди или сзади локомотива. Эти коды принимаются на локомотиве через локомотивные катушки 9 на блок 8 автоматической локомотивной сигнализации, с выхода которого информация передается на блок 10 индикации и передается на блок 11 вычисления программной скорости. Расчет программной скорости производится непрерывно для любой точки движения локомотива по маршруту, в зависимости от тормозных характеристик локомотива, его координаты, расстояния до закрытого светофора или препятствия, требующего снижения скорости или полной остановки, а также в зависимости от длины прицепленных вагонов. Тормозные характеристики локомотива зависят от количества (массы вагонов) и, так же как в прототипе, определяются по максимальному ускорению, которое имеет локомотив при разгоне на определенной позиции контроллера 17 управления тяговыми двигателями. Такой принцип основан на том, что при маневрах тормозная магистраль отключена. Поэтому торможение и разгон производит при маневрах только локомотив и максимальное ускорение разгона, по условиям обеспечения сцепления колесных пар с рельсами, без буксования пропорционально максимально допустимому ускорению торможения без юза. Чем большее ускорение имеет локомотив, тем меньше масса (длина) вагонов и меньше будет длина тормозного пути.
Блок 11 вычисления программной скорости эффективно рассчитывает кривые прицельного торможения при подходе к группам вагонов. Информация об уже прицепленных к локомотиву вагонах обрабатывается в блоке 11 вычисления программной скорости для вычисления их общей длины. Положение вагонов относительно локомотива определяет блок 19 определения положения вагонов по состоянию концевых выключателей 20 или 21, расположенных по обе стороны локомотива и фиксирующих нахождение вагонов, и по положению рукоятки контроллера 17 управления тяговыми двигателями. Для определения координат локомотива на путях станции используется блок 18 спутниковой навигационной системы (GPS) и электронной карты.
Значение фактической скорости определяется по скоростимеру 13, определяющему значение измеряемой скорости по количеству импульсов, поступающих от датчика 12. Это значение сравнивается блоком 15 сравнения с допустимым значением скорости, рассчитанным блоком 11, для осуществления прицельного торможения перед препятствием или экстренного торможения. При превышении фактической скорости над программной, с выхода блока 15 поступает сигнал на блок 16 управления тормозами и тягой для осуществления служебного или экстренного торможения.
Определение максимального ускорения на определенной позиции контроллера 17 осуществляет блок 14 измерения ускорения, в который непрерывно поступает значение фактической скорости от скоростимера 13, связанного с датчиком 12 пути и скорости. Измерение ускорения производится при каждом трогании локомотива с места, так как при остановке всегда может измениться число прицепленных к локомотиву вагонов. При остановке локомотива блок 23 определения остановки, связанный с датчиком 12 пути и скорости, обнуляет информацию об ускорении в блоке 22 памяти. Определенная таким образом длина вагонов является первичной информацией для учета при прицельном торможении и также используется для уточнения общей длины отцепленных вагонов. При полном проследовании состава, хотя бы через одну рельсовую цепь, длина состава определяется другим более точным способом через измерение пройденного пути. Поэтому в отличие от прототипа прицельное торможение осуществляется, во многих случаях, на основе более точных данных о длине состава, что повышает производительность и безопасность маневровой работы локомотивов.
В целом определение длины, а также местоположения группы отцепленных вагонов осуществляется взаимодействующими между собой по радиоканалу 26 цифровой связи блоком 8 автоматической локомотивной сигнализации и ЭВМ 27 автоматизированного рабочего места маневрового диспетчера на основе учета комплекса следующих данных:
- о номерах и порядке следования входящих в состав вагонов (эти данные могут поступать от бригады составителей поезда),
- о начальной координате головы локомотива, его положении в составе и направлении движения по маршруту (известные до начала движения по данному маршруту),
- о длине самого локомотива, известной по его типу,
- о длине всех рельсовых цепей маршрута, известной из блока 18 спутниковой навигационной системы и электронной карты и из маршрутного задания, выдаваемого ЭВМ 27 автоматизированного рабочего места маневрового диспетчера,
- о длине вагонов, определяемой при каждом трогании состава по ускорению, достигаемому на опредеделенной позиции контроллера,
- о длине состава вместе с локомотивом, определяемой в процессе полного проследования состава по каждой из рельсовых цепей маршрута,
- о конечной координате головы локомотива и его положении в составе в момент отцепки вагонов при оставлении их на пути,
- об устных сообщениях маневровому диспетчеру от локомотивной бригады о месте и количестве отцепленых вагонов.
Длина, с точностью не хуже +15 м, рассчитывается как разница между путем, пройденным составом с момента занятия рельсовой цепи изолированного участка пути, и до момента полного освобождения упомянутой рельсовой цепи (это определяет блок 6 кодирования и контроля рельсовых цепей) и известной (из памяти блока 18 спутниковой навигационной системы и электронной карты) длины этого изолированного участка по электронной карте станции. При этом, чем больше рельсовых цепей проследует состав, тем с большей точностью измеряется его длина, за счет усреднения погрешностей измерений. Измерение пройденного пути производится совместно по изменению координаты, получаемой от приемника спутниковой навигации, и пути, измеренного с помощью датчика 12 пути и скорости.
На основании перечисленных данных блок 8 автоматической локомотивной сигнализации отображает состав на дисплее блока 10 индикации, а ЭВМ 27 автоматизированного рабочего места маневрового диспетчера отображает состав на своем дисплее. Данные о координатах местоположения отцепленных вагонов анализируются маневровым диспетчером и заносятся им в базу данных (в блок 28 памяти) вместе с допусками и примечаниями, характеризующими достигнутый уровень точности. В большинстве случаев этот уровень удовлетворяет из-за того, что данные вырабатываются несколькими взаимно дополняющими и проверяющими друг друга способами. В дальнейшем маневровый диспетчер использует эти данные для формирования заданий при проведении последующей маневровой работы. Если данные, полученные из разных источников, противоречат, то это служит поводом для дальнейшего оперативного их уточнения с помощью эксплуатационного штата станции.
Задание, передаваемое на локомотив по радиоканалу 26 цифровой связи, содержит координаты начала и конца маршрутов перемещения маневрового локомотива, а также координаты границ и длину каждой группы вагонов с учетом возможности прицельного торможения локомотива в конце полурейсов. Это существенно ускоряет маневровую работу. При этом составители поездов и машинисты маневровых локомотивов существенно освобождаются от работы по поиску нужных отцепленных вагонов, рассредоточенных на путях станции, и их регистрации в базе данных.
При наличии в блоке 8 автоматической локомотивной сигнализации данных о длине состава, полученных по радиоканалу 26 цифровой связи от блока 7 аппаратуры электрической централизации, блок 8 автоматической локомотивной сигнализации, воздействием на вход управления отображением последней секции маневрового маршрута на дисплее блока 10 индикации, вызывает появление на дисплее изображения последней секции маневрового маршрута с наложением на нее изображения маневрового состава с его известной длиной и реальным положением на маршруте. Последняя секция маршрута изображается подробно с разбиением на составляющие ее изолированные подсекции. В отличие от прототипа, это позволяет, например, при полурейсах вытягивания вагонов с боковых путей в горловину станции и последующем осаживании вагонов из горловины станции на путь нахождения формируемого состава обойтись без заездов за последние в маршруте маневровые светофоры, для автоматического размыкания нужной для приготовления маршрута осаживания изолированной подсекции последней секции маршрута. Как только поезд, в процессе движения по последней секции маршрута, освобождает очередную изолированную подсекцию, ЭВМ 27 автоматизированного рабочего места получает информацию от блока 7 аппаратуры поста ЭЦ, и вырабатывает, и передает в блок 29 команду ускорения автоматического размыкания данной подсекции маршрута. Размыкание подсекции позволяет быстрее приготовить маршрут и начать движение локомотива в обратном направлении. Кроме этого, маневр ускоряется из-за прицельной остановки поезда сразу за упомянутой подсекцией. Соответствующая вспомогательная подсказывающая информация непрерывно отображается для машиниста на дисплее блока 10 индикации.
Если упомянутая подсекция представляет собой бесстрелочный участок, то для дополнительного уменьшения избыточного пробега она в процессе приготовления маршрутного задания разбивается на виртуальные блок участки длиной 100-200 м с известными координатами начал и концов с последующим контролем их занятия и освобождения посредством проверки нахождения в их пределах координат головы или хвоста состава с известной длиной. В этом случае прицельная остановка состава, например, для приготовления маршрута его обратного движения может производиться сразу за первым из виртуальных блок участков. Логика размыкания виртуальных блок участков повторяет логику размыкания изолированных участков в маршруте и осуществляется в блоке 7 аппаратуры поста ЭЦ во взаимодействии блока 29 ускорения автоматического размыкания последних секций маршрутов с блоком 8 автоматической локомотивной сигнализации, осуществляемым по радиоканалу 26 цифровой связи.
Таким образом, предлагаемая система обеспечивает решение технической задачи повышения производительности при сохранении требуемого уровня функциональной безопасности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комплексная система управления маневровыми локомотивами | 2019 |
|
RU2725575C1 |
| СИСТЕМА МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ (МАЛС) | 2008 |
|
RU2369509C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ | 2012 |
|
RU2508218C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2010 |
|
RU2429153C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ МАНЕВРОВОГО ЛОКОМОТИВА | 2005 |
|
RU2284275C1 |
| СИСТЕМА ПОЛУАВТОМАТИЧЕСКОЙ БЛОКИРОВКИ ДЛЯ ОГРАНИЧЕННЫХ ПО ДЛИНЕ МЕЖСТАНЦИОННЫХ ПЕРЕГОНОВ | 2015 |
|
RU2591554C1 |
| Станционное устройство системы маневровой автоматической локомотивной сигнализации, интегрированной с микропроцессорной централизацией железнодорожной станции | 2022 |
|
RU2780257C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЛОКОМОТИВОВ ПРИ МАНЕВРОВОЙ РАБОТЕ | 2014 |
|
RU2567099C1 |
| СИСТЕМА ПОЛУАВТОМАТИЧЕСКОЙ БЛОКИРОВКИ ДЛЯ ОГРАНИЧЕННЫХ ПО ДЛИНЕ МЕЖСТАНЦИОННЫХ ПЕРЕГОНОВ | 2015 |
|
RU2591553C1 |
| Система передачи ответственной информации о маршрутах приема/отправления и кодах АЛС | 2018 |
|
RU2701274C1 |
Изобретение относится к области железнодорожной автоматики и телемеханики и может быть использовано в системах управления движением локомотивов. Система содержит светофоры (1,2) и рельсовые цепи (3-5), блок кодирования и контроля рельсовой цепи (6), блок аппаратуры поста электрической централизации (7) и блок автоматической локомотивной сигнализации (8), локомотивные катушки (9), блок индикации (10), блок вычисления программной скорости (11), датчик пути и скорости (12), скоростимер (13), блок измерения ускорения (14), блок сравнения (15), блок управления тормозами и тягой (16), контроллер управления тяговыми двигателями (17), блок спутниковой навигационной системы и электронной карты (18), блок определения положения вагонов (19), первый (20) и второй (21) концевые выключатели автосцепок локомотива, блок памяти (22), блок определения остановки (23). Блок автоматической локомотивной сигнализации (8) и блок аппаратуры поста электрической централизации (7) связаны между собой через свои антенны (24, 25) посредством радиоканала цифровой связи. Блок аппаратуры поста электрической централизации (7) соединен с ЭВМ автоматизированного рабочего места маневрового диспетчера (27), в блоке памяти (28) которой содержится база данных о местоположении групп отцепленных вагонов, находящихся в пределах станции. Блок аппаратуры поста электрической централизации (7) снабжен блоком ускорения автоматического размыкания последних секций маршрутов (29), а второй выход блока автоматической локомотивной сигнализации (8) подключен к входу управления отображением последней секции маневрового маршрута на дисплее блока индикации (10). Достигается повышение производительности системы при сохранении требуемого уровня функциональной безопасности. 1 ил.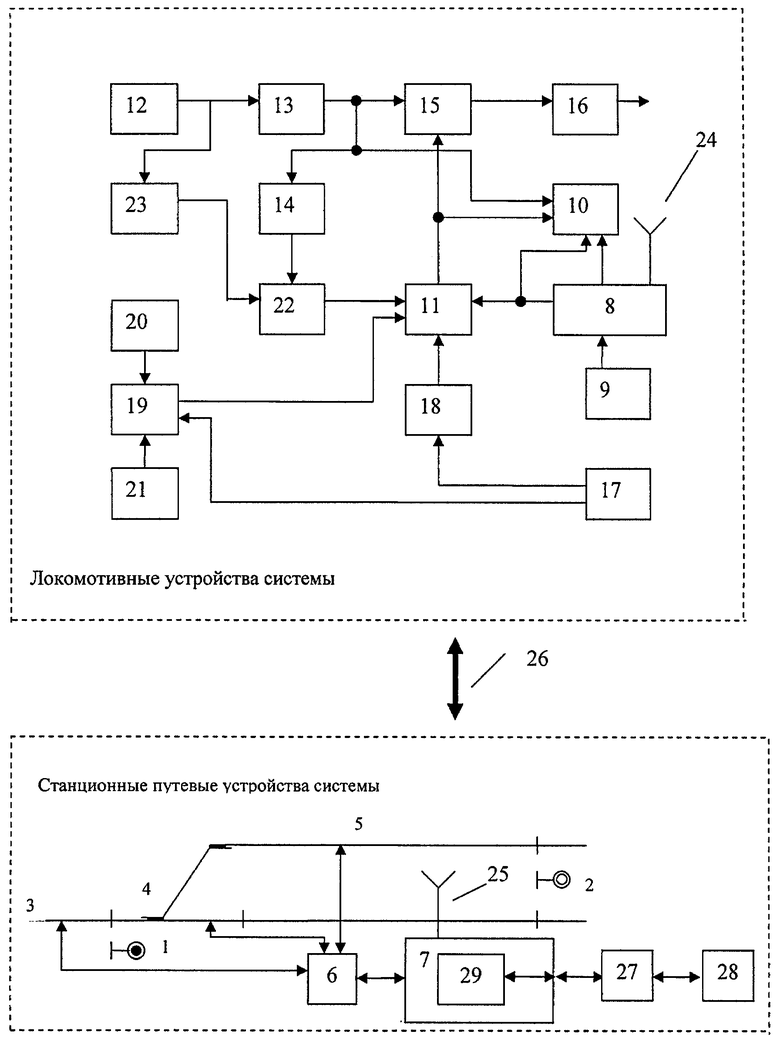
Система управления движением локомотивов при маневровой работе, содержащая светофоры и рельсовые цепи, соединенные с блоком кодирования и контроля рельсовой цепи, который подключен к блоку аппаратуры поста электрической централизации, и блок автоматической локомотивной сигнализации, подключенный входом к локомотивным катушкам, первый выход блока автоматической локомотивной сигнализации соединен с первыми входами блока индикации и блока вычисления программной скорости, датчик пути и скорости, соединенный через скоростимер с вторым входом блока индикации, с входом блока измерения ускорения и с первым входом блока сравнения, второй вход которого соединен с выходом блока вычисления программной скорости и с третьим входом блока индикации, выход блока сравнения подключен к блоку управления тормозами и тягой, контроллер управления тяговыми двигателями подсоединен первым выходом к блоку спутниковой навигационной системы и электронной карты, выход которого подключен к второму входу блока вычисления программной скорости, второй выход контроллера управления подключен к первому входу блока определения положения вагонов, второй и третий входы которого соединены соответственно с первым и вторым концевыми выключателями автосцепок локомотива, а выход подключен к третьему входу блока вычисления программной скорости, четвертый вход которого соединен с выходом блока памяти, первый вход которого соединен с выходом блока измерения ускорения, а второй вход соединен с выходом блока определения остановки, вход которого связан с выходом датчика пути и скорости, отличающаяся тем, что блок автоматической локомотивной сигнализации и блок аппаратуры поста электрической централизации связаны между собой через свои антенны посредством радиоканала цифровой связи, причем блок аппаратуры поста электрической централизации соединен с ЭВМ автоматизированного рабочего места маневрового диспетчера, в блоке памяти которой содержится база данных о местоположении групп отцепленных вагонов, находящихся в пределах станции, при этом блок аппаратуры поста электрической централизации снабжен блоком ускорения автоматического размыкания последних секций маршрутов, а второй выход блока автоматической локомотивной сигнализации подключен к входу управления отображением последней секции маневрового маршрута на дисплее блока индикации.
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ МАНЕВРОВОГО ЛОКОМОТИВА | 2005 |
|
RU2284275C1 |
| Устройство для управления стрелочным приводом | 1989 |
|
SU1751022A1 |
| СИСТЕМА ГОРОЧНОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ С ИСПОЛЬЗОВАНИЕМ РАДИОКАНАЛА (ГАЛС Р) | 2005 |
|
RU2303542C1 |
| СИСТЕМА МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ (МАЛС) | 2008 |
|
RU2369509C1 |

